Изобретение относится к контрольно-измерительной технике и может быть использовано для определения уровня и электрофизических параметров жидких и сыпучих материалов в хранилищах и замкнутых резервуарах.
Известен ряд способов [1, 2, 3, 4, 5] и устройств [3, 4, 5, 6, 7] измерения расстояния до зондируемого материала, которые основаны на измерении времени распространения волн от излучателя до поверхности зондируемого материала и обратно.
Наиболее близким по совокупности существенных признаков к заявляемому (прототип) является радарный измеритель и способ измерения уровня в цистернах [8], который включает формирование зондирующего радиочастотного сигнала с периодической частотной модуляцией, излучение сформированного сигнала в направлении зондируемого материала, прием спустя время распространения отраженного сигнала, смешивание его с частью излученного сигнала, выделение низкочастотных составляющих результирующего сигнала и выделение из них составляющих, соответствующих дальности до зондируемого материала, определение времени распространения радиоволн и вычисление расстояния по известной скорости распространения радиоволн и диапазону перестройки частоты.
Указанный способ измерения дальности осуществляется радарным уровнемером, содержащим последовательно соединенные схему формирования управляющего напряжения, управляемый генератор зондирующего сигнала, умножитель частоты, полосовой фильтр, усилитель, два направленных ответвителя, антенну, смеситель, соединенный своими входами с выходами двух направленных ответвителей, а выходом с последовательно соединенными усилителем, дифференцирующим фильтром, фильтром нижних частот, усилителем, аналого-цифровым преобразователем, выход которого соединен с первым входом сигнального процессора, второй и третий входы которого соединены соответственно с кварцевым генератором и делителем частоты, а один из выходов соединен со схемой формирования управляющего напряжения, которая содержит цифроаналоговый преобразователь, усилитель и фильтр нижних частот, при этом вход делителя частоты соединен с выходом управляемого генератора зондирующего сигнала. Входы и выходы сигнального процессора соединены со средствами индикации уровня.
Известные способы измерения дальности и уровнемеры, реализующие известные способы, имеют, по меньшей мере, два недостатка. Низкую для ряда случаев точность измерения дальности и отсутствие возможности определения электрофизических параметров зондируемого материала, по которым можно было бы судить о его составе.
Указанные недостатки во многом обусловлены отражениями сигнала в антенно-фидерном тракте, их непостоянством и изменением электрической длины антенно-фидерного тракта. Непостоянство коэффициентов отражения от антенны и изменение электрической длины антенно-фидерного тракта, в свою очередь, обусловлены налипанием различных осадков на элементы конструкции антенны, изменением температуры среды и другими внешними факторами.
Цель предлагаемого изобретения - уменьшение погрешности измерения уровня и расширение функциональных возможностей за счет измерения электрофизических параметров зондируемого материала, по которым можно судить о его составе.
Поставленная цель достигается тем, что в способе измерения расстояния от излучателя до поверхности зондируемого материала и его электрофизических параметров, включающем формирование зондирующего радиочастотного сигнала с периодической частотной модуляцией, излучение сформированного сигнала в направлении зондируемого материала, прием спустя время распространения отраженного сигнала, смешивание его с частью излученного сигнала, выделение низкочастотных составляющих результирующего сигнала и выделение из них информационной составляющей, соответствующей дальности до зондируемого материала, вычисление спектра информационной составляющей и его центральной частоты, вычисление времени распространения радиочастотного сигнала до поверхности зондируемого материала и обратно и вычисление расстояния по известным скорости и времени распространения радиоволн, из низкочастотных составляющих результирующего сигнала дополнительно выделяют нулевые составляющие, обусловленные паразитным прохождением зондирующего сигнала в приемный тракт, отражением от неоднородностей антенно-фидерного тракта и слоя осадков на антенне, вычисляют спектр нулевых составляющих и вычисляют меру его отличия от эталонного. Если мера отличия спектров превышает контрольный уровень, определяют вызванные осадками на антенне дополнительную задержку радиоволн при распространении в антенне и погрешность измерения расстояния, обусловленную дополнительным искажением спектра информационной составляющей и учитывают эти величины при коррекции результатов расчета расстояния. Дополнительную задержку радиоволн при распространении в антенне, вызванную осадками на антенне, вычисляют по выделенным нулевым составляющим с помощью дополнительных измерений модуля и фазы нулевой составляющей на центральных частотах, по крайней мере, двух поддиапазонов перестройки частоты. Границы поддиапазонов перестройки частоты определены заранее.
Эталонные спектры вычисляют и записывают при калибровке измерителя расстояния по выделенным нулевой и информационной составляющим. Запись указанных спектров выполняют в условиях отсутствия мешающих отражений при расстоянии от антенны до поверхности материала, обеспечивающем отсутствие взаимодействия спектров выделенных информационной и нулевой составляющих.
В первом варианте способа измерения расстояния и электрофизических параметров материала погрешность измерения расстояния, обусловленную искажением спектра информационной составляющей, учитывают путем вычисления величины асимметрии спектра информационной составляющей и сопоставления вычисленной величины асимметрии с расчетной для различных коэффициентов отражения от антенно-фидерного тракта и различных коэффициентов отражения от зондируемого материала. Эти вычисления производят в полном диапазоне перестройки частоты и в диапазоне перестройки, составляющем часть полного. Результат вычисления расстояния корректируют с учетом дополнительной задержки радиоволн, вызванной осадками на антенне.
Во втором варианте способа измерения расстояния и электрофизических параметров материала погрешность измерения расстояния, обусловленную искажением спектра информационной составляющей, учитывают путем формирования неискаженной низкочастотной составляющей с задержкой, соответствующей центральной частоте спектра выделенной информационной составляющей. Используя эту составляющую, вычисляют сумму спектров, первое слагаемое которой образовано спектром неискаженной составляющей, а второе слагаемое образовано спектром сигнала с амплитудой, равной произведению корректирующего коэффициента на амплитуду измеренной нулевой составляющей и на амплитуду сформированной неискаженной составляющей, фазой, равной нулю, и задержкой, соответствующей разности задержек указанной неискаженной низкочастотной составляющей и нулевой составляющей. Далее сравнивают полученную сумму со спектром выделенной информационной составляющей и изменяют амплитуду, задержку и фазу сформированной неискаженной составляющей до наилучшего совпадения со спектром выделенной информационной составляющей. За частоту спектра сигнала, соответствующую дальности до зондируемого материала, и его фазу принимают центральную частоту и фазу сформированной неискаженной низкочастотной составляющей сигнала при наилучшем совпадении спектров информационной составляющей и сформированной суммы. При этом на величину дополнительной задержки в слое осадков на антенне корректируют расстояние и фазу коэффициента отражения от зондируемого материала, вычисленные по найденной центральной частоте и фазе сформированной неискаженной низкочастотной составляющей.
Поставленная цель достигается также тем, что в устройство, содержащее: антенну; управляемый источник зондирующего сигнала (УИЗС), управляющий вход которого соединен с первым выходом процессора, а выход соединен с последовательно соединенными делителем мощности (ДМ) и направленным ответвителем (НО); смеситель (См), входы которого соединены соответственно со вторым выходом ДМ и со вторым выходом НО, и последовательно соединенные схему предварительной аналоговой обработки (СПАО) и аналого-цифровой преобразователь (АЦП), выход которого соединен с входом процессора, дополнительно введены два управляемых фильтра (УФ), каждый из которых имеет два входа и один выход, и схема управления с одним входом и двумя выходами. Первый вход первого УФ соединен с выходом смесителя. Выход первого УФ соединен с первым входом второго УФ, выход которого соединен со входом СПАО. Вторые входы первого и второго УФ соединены с соответствующими выходами схемы управления, вход которой соединен со вторым выходом процессора. При этом первый УФ выполнен в виде дифференцирующего УФ, второй УФ выполнен в виде управляемого фильтра нижних частот (ФНЧ), а схема управления выполнена в виде управляемого коммутатора. Третий выход процессора является информационным выходом устройства.
Заявляемый способ измерения расстояния и электрофизических параметров зондируемого материала и устройство для его осуществления обладают совокупностью признаков, не известных из уровня техники для способов и устройств подобного назначения, что позволяет сделать вывод о соответствии критерию "новизна".
Для анализа изобретательского уровня необходимо учесть следующее.
Известен способ измерения электрофизических параметров среды средствами радиолокации, основанный на измерении и анализе частотной зависимости коэффициента отражения радиоволн [9]. В указанном способе фаза коэффициента отражения от материала измеряется на каждой излучаемой частоте из дискретного ряда частот, а учет зависимости фазы от расстояния до поверхности материала и исключение неоднозначности отсчета решается путем использования дополнительного радиолокационного канала, несущая частота которого превышает частоту измерительного канала на несколько порядков. Дополнительный канал обеспечивает формирование опорного сигнала, фаза которого определяется только дальностью до границы материала. Сигнал опорного канала модулируется гармоническим колебанием, начальная фаза и частота которого совпадают с начальной фазой и частотой сигнала измерительного канала. Демодулированный сигнал опорного радиолокационного канала выполняет роль опорного сигнала, относительно фазы которого оценивается изменение фазы сигнала измерительного канала. При этом не учитываются изменения фазы принятого сигнала при изменении параметров антенны. Следовательно, в известном способе необходимо обеспечить стабильность параметров антенно-фидерного тракта.
В заявленном способе измерение дальности и коэффициента отражения производят на одинаковых частотах. Используется связь между фазой частотно-модулированного зондирующего сигнала, фазой коэффициента отражения и фазой сигнала разностной частоты и учитываются влияние параметров антенны и их изменения на измерение расстояния до зондируемого материала и фазы коэффициента отражения. Измерение необходимых параметров производят в одном варианте способа путем измерения центральной частоты информационной составляющей спектра сигнала разностной частоты, измерения величины искажений спектра информационной составляющей и сравнение с величиной искажений спектра, для которых известны градуировочные зависимости величин поправок центральной частоты и фазы. В другом варианте способа измерения производят сравнение спектра информационной составляющей со спектром эталонного сигнала, для которого известны центральная частота и фаза.
Таким образом, в отличие от известного способа исключен дополнительный опорный радиолокационный канал и введено сравнение с эталонными величинами.
Для исключения неоднозначности измерений, которые могут быть кратны половине длины волны, введено измерение, по меньшей мере, на двух частичных поддиапазонах перестройки частоты и на полном диапазоне перестройки.
Известен также способ и устройство измерения уровня жидкости [4]. Способ включает генерирование зондирующего сигнала с периодически изменяющейся частотой и смешивание зондирующего сигнала с эхо-сигналом, получение на выходе смесителя сигнала разностной частоты, фильтрацию сигнала разностной частоты полосовым фильтром для подавления частот ниже нижней граничной частоты и выше верхней частоты, микропроцессорное управление нижней граничной частотой так, что минимизировано подавление сигнала, частота которого соответствует дальности до зондируемого материала (информационная составляющая), и подавляются сигналы, частоты которых ниже частоты информационной составляющей.
Этот способ реализован устройством, содержащим: генератор, управляемый напряжением (ГУН) с управляющим входом и сигнальным выходом; делитель мощности (ДМ) с одним входом и двумя выходами; смеситель; управляемый фильтр верхних частот (ФВЧ) с одним выходом и двумя входами; фильтр нижних частот (ФНЧ); регулируемый усилитель с одним выходом и двумя входами; аналого-цифровой преобразователь (АЦП); микропроцессор с тремя выходами и одним входом; генератор пилообразного напряжения. При этом сигнальный выход ГУН соединен с входом ДМ, два выхода которого соединены соответственно с входами антенны и смесителя, а выход смесителя соединен с первым входом ФВЧ, второй вход которого соединен с первым выходом микропроцессора, а выход соединен со входом ФНЧ. Выход ФНЧ соединен с первым входом регулируемого усилителя, второй вход которого соединен со вторым выходом микропроцессора, а выход соединен с входом АЦП. Выход АЦП соединен с входом микропроцессора. Третий выход микропроцессора соединен с входом генератора пилообразного напряжения, выход которого соединен с управляющим входом ГУН.
Таким образом, в известном способе после получения сигнала разностной частоты, т.е. на низкой частоте, отфильтровываются (подавляются) нулевые составляющие, обусловленные паразитным прохождением зондирующего сигнала в приемный тракт, отражением от неоднородностей антенно-фидерного тракта и слоя осадков на антенне. При этом никак не учитывается, что из-за взаимодействия в смесителе высокочастотных сигналов, отраженных от антенны и от зондируемого материала, в сигнале разностной частоты появляются дополнительные низкочастотные спектральные составляющие, которые соответствуют расстояниям между неоднородностями в антенно-фидерном тракте и зондируемым материалом. Эти составляющие проявляются в виде "виртуальных" отражателей, расположенных рядом с зондируемым материалом и их нельзя подавить отфильтровыванием (подавлением) нулевых составляющих сигнала разностной частоты (как предложено в указанном патенте). Указанные спектральные составляющие ("виртуальные" отражатели) приводят к появлению погрешности измерения расстояния. В соответствии с известным способом в устройстве для измерения уровня после смесителя включен управляемый фильтр верхних частот, который постоянно подавляет нулевые составляющие и регулируется таким образом, что при изменении измеряемого уровня фильтр подавляет спектральные составляющие от отражателей, расстояние до которых меньше, чем расстояние до зондируемого материала. Однако, как было уже указано, любой фильтр не может подавить спектральные составляющие "виртуальных" отражателей.
В заявленном способе нулевые составляющие выделяются дополнительно и используются для коррекции результатов измерения расстояния и анализа электродинамических параметров зондируемого материала. В соответствии с этим на выходе смесителя устройства включены управляемые фильтры, которые не подавляют нулевые составляющие, как в известном устройстве, а периодически выделяют нулевые составляющие или смесь информационной составляющей с "виртуальной" составляющей. Таким образом, устройство отличается наличием дополнительных элементов (управляемого фильтра и устройства управления) и параметрами элемента (фильтра), соединенного с выходом смесителя, что также является признаком устройства.
Эти отличия приводят к появлению качественно новых свойств заявленных способа и устройства - возможности измерения величин погрешностей, которые возникают из-за "виртуальных" отражателей перед зондируемым материалом, и коррекции результатов измерения на величину погрешности измерений. Эти новые свойства позволяют тем самым повысить точность измерений и, кроме того, позволяют осуществить измерение электродинамических параметров зондируемого материала.
Указанные отличия не следуют явным образом из доступных научно-технических источников, что позволяет сделать вывод о соответствии заявленного технического решения критерию изобретения "Изобретательский уровень".
Сущность изобретения поясняется с помощью чертежей, изображенных на фиг.1-6.
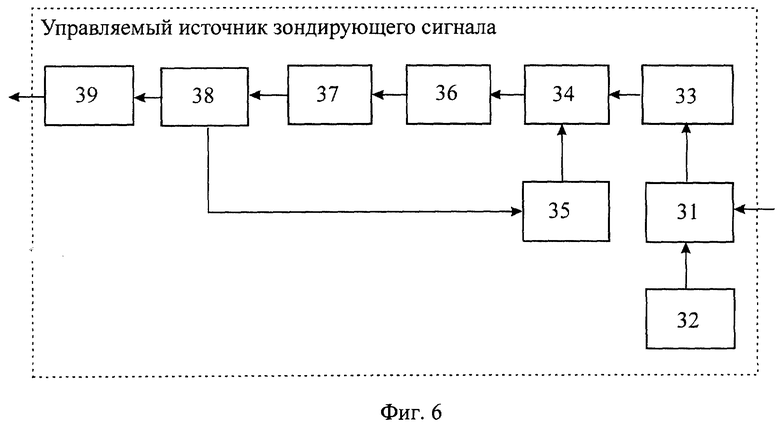
На фиг.1 показана антенна с диэлектрической крышкой и налипшими осадками.
На фиг.2 изображены градуировочные кривые для определения фазы коэффициента отражения от материала.
На фиг.3 изображены градуировочные кривые для определения величины поправки центральной частоты спектра информационной составляющей.
На фиг.4 изображена структурная схема устройства для измерения расстояния и электрофизических параметров зондируемого материала.
На фиг.5 изображен первый вариант управляемого источника зондирующего сигнала.
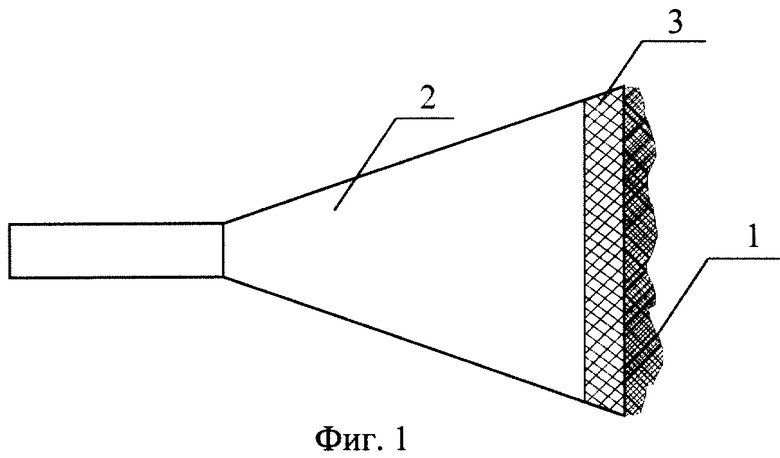
На фиг.6 изображен второй вариант управляемого источника зондирующего сигнала.
Способ измерения расстояния и электрофизических параметров зондируемого материала осуществляют следующим образом.
После излучения сформированного зондирующего радиочастотного сигнала с периодической линейной частотной модуляцией (или с дискретной перестройкой частоты по линейному закону) осуществляют спустя время распространения прием сигнала uм, отраженного зондируемым материалом, и сигнала uа, отраженного неоднородностями в антенно-фидерном тракте. Затем смешивают их с частью излучаемого сигнала  uг на смесительном элементе, вольт-амперная характеристика которого содержит множество составляющих, в том числе квадратичную составляющую iсм=Au
uг на смесительном элементе, вольт-амперная характеристика которого содержит множество составляющих, в том числе квадратичную составляющую iсм=Au

Для частотной модуляции ω (t)=ω 0+ω мод(t) с несущей частотой ω 0 и переменной частью ω мод(t) низкочастотные составляющие выражения (1) при условии, что время распространения зондирующего сигнала до материала и обратно τ м много меньше периода модуляции Тмод, имеют вид:



где Uг - амплитуда напряжения гетеродина;
Uм - амплитуда напряжения сигнала, отраженного зондируемым материалом;
ϕ м - фаза волны, отраженной от материала;
Ua - амплитуда напряжения сигнала, отраженного от антенны;
τ a - время распространения зондирующего сигнала до неоднородности в антенне и обратно (до диэлектрической крышки и обратно)
ϕ a - фаза волны, отраженной от неоднородности в антенне.
Низкочастотная составляющая uгм несет информацию о расстоянии до зондируемого материала и о фазе коэффициента отражения от зондируемого материала. Низкочастотные составляющие uгм и uам обычно невозможно разделить, т.к. τ а обычно меньше разрешающей способности дальномера. Эти составляющие выделяются в виде неразделяемой суммы (uгм+uам). При этом низкочастотная составляющая uам является "паразитной", соответствующей появлению "виртуальных" отражателей, расположенных рядом с зондируемым материалом, и искажающей информацию о расстоянии до зондируемого материала и о фазе коэффициента отражения. Эти искажения проявляются, например, при спектральной обработке сигнала в искажении формы спектра результирующей составляющей (uгм+uам). При этом спектр результирующей составляющей становится несимметричным. Асимметрия спектра приводит к смещению центральной частоты на величину Δ ω и соответствующей погрешности вычисления расстояния на величину Δ R.
При неизменном отражении от антенны Uа=const и ϕ a=const погрешность Δ R не зависит от расстояния и ее влияние можно исключить при калибровке измерителя расстояния. Однако при изменении температуры, налипании осадков на антенну и других внешних факторах меняются Ua и ϕ a, что приводит к появлению ошибки определения расстояния и невозможности определения фазы коэффициента отражения от материала.
Ошибка определения расстояния состоит из двух слагаемых. Первое слагаемое появляется из-за указанной асимметрии спектра и непостоянства этой асимметрии. Второе слагаемое появляется из-за изменения электрической длины антенно-фидерного тракта за счет налипания осадков 1 на антенну 2, например на диэлектрическую крышку 3, как показано на фиг.1.
В обоих вариантах для компенсации влияния асимметрии спектра из-за паразитной составляющей uам из суммы постоянных и низкочастотных составляющих результирующего сигнала u выделяют постоянную составляющую  составляющую uа, обусловленную отражением от антенны, измеряют ее амплитуду Uа и вычисляют отношение
составляющую uа, обусловленную отражением от антенны, измеряют ее амплитуду Uа и вычисляют отношение  учитывая, что
учитывая, что  при Uм и Uа много меньше Uг. Затем вычисляют спектр нулевых составляющих Sa(ω j) на дискретных частотах ω j, применяя прямое дискретное преобразование Фурье к составляющей ua, находят его центральную частоту или эквивалентное ей τ a, фазу ϕ a и меру отличия спектра от эталонного Sэт(ω j). В качестве меры отличия спектров может использоваться любая математическая метрика, используемая для оценки различия двух функций. Например, Эвклидова метрика [12] ρ :
при Uм и Uа много меньше Uг. Затем вычисляют спектр нулевых составляющих Sa(ω j) на дискретных частотах ω j, применяя прямое дискретное преобразование Фурье к составляющей ua, находят его центральную частоту или эквивалентное ей τ a, фазу ϕ a и меру отличия спектра от эталонного Sэт(ω j). В качестве меры отличия спектров может использоваться любая математическая метрика, используемая для оценки различия двух функций. Например, Эвклидова метрика [12] ρ :
где m - общее число дискретных частот в спектре.
При превышении мерой отличия спектров контрольного уровня вычисляют величины возникших погрешностей.
В первом варианте способа из суммы постоянных и низкочастотных составляющих результирующего сигнала выделяют также сумму составляющих (uгм+uам), вычисляют ее дискретный спектр  его центральную частоту ω Σ и коэффициент асимметрии спектра β [10]:
его центральную частоту ω Σ и коэффициент асимметрии спектра β [10]:

где  - k-е центральные моменты спектра S(ω j).
- k-е центральные моменты спектра S(ω j).
По величине коэффициента асимметрии β вычисляют величину разности фаз (ϕ м-ϕ a)=(ϕ м-ϕ a)изм-(ϕ м-ϕ a)эт и величину поправки Δ ω =Δ ω изм-Δ ω эт, на которую отличается центральная частота спектра информационной составляющей uгм. Здесь (ϕ м-ϕ a)изм и Δ ω изм - значения разности фаз и смещения частоты, вычисленные по рассчитанному коэффициенту асимметрии; (ϕ м-ϕ a)эт и Δ ω эт - значения разности фаз и смещения частоты, вычисленные по эталонному спектру при калибровке. При этом величину разности фаз (ϕ м-ϕ a) определяют, используя набор градуировочных кривых  в к оторых в функциональной зависимости
в к оторых в функциональной зависимости  отношение
отношение  является параметром (фиг.2, кривые 4 и 5), а величину поправки Δ ω определяют, используя набор градуировочных кривых
является параметром (фиг.2, кривые 4 и 5), а величину поправки Δ ω определяют, используя набор градуировочных кривых  которые вычисляют для различных соотношений
которые вычисляют для различных соотношений  (фиг.3, кривые 6 и 7) и для различных значений разности фаз (ϕ м-ϕ a). Градуировочные кривые на фиг.3 приведены только для одного значения (ϕ м-ϕ a). Для исключения неоднозначности определения Δ ω изм вычисления величины асимметрии спектра выполняют в полном диапазоне перестройки частоты и в диапазоне перестройки, составляющем часть полного. В последнем случае (кривая 8 на фиг.3) одинаковым значениям Δ ω изм должны соответствовать меньшие значения коэффициента асимметрии: β изм,част<β изм,полн.
(фиг.3, кривые 6 и 7) и для различных значений разности фаз (ϕ м-ϕ a). Градуировочные кривые на фиг.3 приведены только для одного значения (ϕ м-ϕ a). Для исключения неоднозначности определения Δ ω изм вычисления величины асимметрии спектра выполняют в полном диапазоне перестройки частоты и в диапазоне перестройки, составляющем часть полного. В последнем случае (кривая 8 на фиг.3) одинаковым значениям Δ ω изм должны соответствовать меньшие значения коэффициента асимметрии: β изм,част<β изм,полн.
Уточненное значение частоты ω р сигнала разностной частоты для составляющей, соответствующей дальности R до зондируемого материала, определяют как сумму - ω р=ω ∑ +Δ ω , а по вычисленной частоте сигнала разностной частоты, известным диапазону перестройки частоты, периоду модуляции и скорости распространения радиоволн вычисляют уточненное расстояние.
Фазу коэффициента отражения от зондируемого материала определяют путем суммирования измеренного значения фазы ϕ а составляющей ua и определенной по градуировочным кривым разности фаз (ϕ м-ϕ a):
ϕ м=ϕ а+(ϕ м-ϕ а).
Во втором варианте осуществления способа из низкочастотных составляющих результирующего сигнала также выделяют сумму составляющих (uгм+uам), которая является информационной, но искаженной слагаемым uам, вычисляют спектр указанной суммы  и его центральную частоту ω Σ .
и его центральную частоту ω Σ .
Учитывая полученное значение амплитуды Uг, отношение амплитуд  и задавая амплитуду неискаженной составляющей результирующего сигнала Uм, с помощью прямого преобразования Фурье вычисляют сумму спектров
и задавая амплитуду неискаженной составляющей результирующего сигнала Uм, с помощью прямого преобразования Фурье вычисляют сумму спектров  первое слагаемое которой
первое слагаемое которой  образовано сформированной неискаженной низкочастотной составляющей
образовано сформированной неискаженной низкочастотной составляющей

с амплитудой, равной AUгUмф, фазой ϕ мф=0 и задержкой  определяемой через центральную частоту ω ∑ спектра выделенной информационной составляющей (uгм+uам), период модуляции Тмод и диапазон перестройки частоты Δ ω мод, а второе слагаемое образовано спектром
определяемой через центральную частоту ω ∑ спектра выделенной информационной составляющей (uгм+uам), период модуляции Тмод и диапазон перестройки частоты Δ ω мод, а второе слагаемое образовано спектром  составляющей uамф, вычисленной по измеренным значениям τ а, ϕ а, Uа и заданным τ мф, ϕ мф и Uмф:
составляющей uамф, вычисленной по измеренным значениям τ а, ϕ а, Uа и заданным τ мф, ϕ мф и Uмф:

Амплитудный спектр сформированной суммы  сравнивают с амплитудным спектром выделенной искаженной информационной составляющей
сравнивают с амплитудным спектром выделенной искаженной информационной составляющей  изменяют величину τ мф, фазу ϕ мф и амплитуду Uмф до наилучшего совпадения этих спектров, т.е. до достижения минимума указанной ранее меры отличия ρ между ними. За центральную частоту спектра сигнала, соответствующую дальности до зондируемого материала, фазу этого сигнала ϕ м и амплитуду Uм принимают частоту, фазу и амплитуду слагаемого и uгмф при наилучшем совпадении спектра информационной составляющей
изменяют величину τ мф, фазу ϕ мф и амплитуду Uмф до наилучшего совпадения этих спектров, т.е. до достижения минимума указанной ранее меры отличия ρ между ними. За центральную частоту спектра сигнала, соответствующую дальности до зондируемого материала, фазу этого сигнала ϕ м и амплитуду Uм принимают частоту, фазу и амплитуду слагаемого и uгмф при наилучшем совпадении спектра информационной составляющей  и спектра сформированной суммы
и спектра сформированной суммы  по которым определяют искомое расстояние, модуль и фазу коэффициента отражения.
по которым определяют искомое расстояние, модуль и фазу коэффициента отражения.
Если длина антенно-фидерного тракта такова, что нулевая составляющая имеет более полутора периодов биений и амплитуда волны, отраженной от антенны, более чем в десять раз превышает амплитуды волн, отраженных другими элементами фидерного тракта, то без изменения сущности заявленного способа можно определять амплитудные значения напряжений uгм и uам следующим образом. По выделенной информационной составляющей измеряют ее максимальное (uгм+uам)max и минимальное (uгм+uам)min значения, которые соответственно равны сумме Uгм+Uам и разности Uгм-Uам амплитудных значений этих напряжений. Полусумма этих значений даст амплитуду слагаемого uгм, а полуразность - амплитуду слагаемого uам.
В обоих вариантах осуществления способа измерения расстояния до поверхности зондируемого материала и его электрофизических параметров слагаемое погрешности Δ lэл из-за изменения электрической длины антенно-фидерного тракта за счет налипания слоя осадков dос с относительной диэлектрической проницаемостью ε 0 определяется одинаково.
В случае размещения диэлектрической защитной крышки в апертуре антенны (фиг.1) это слагаемое будет:
В этом выражении doc и ε 0 в общем случае неизвестны.
Коэффициент отражения V от крышки со слоем осадков можно записать в виде [11, с. 57]:

где 
 - импеданс свободного пространства (воздуха);
- импеданс свободного пространства (воздуха);
 - импеданс крышки;
- импеданс крышки;
 - импеданс газовой среды над зондируемым материалом;
- импеданс газовой среды над зондируемым материалом;
 - импеданс осадков на крышке;
- импеданс осадков на крышке;
i - мнимая единица;

μ возд, ε возд - соответственно магнитная и диэлектрическая проницаемости воздуха;
μ кр, ε кр - соответственно магнитная и диэлектрическая проницаемости материала крышки;
μ газ, ε газ - соответственно магнитная и диэлектрическая проницаемости газовой среды над зондируемым материалом;
μ ос, ε ос - соответственно магнитная и диэлектрическая проницаемости слоя осадков.
Уравнение (2) содержит две неизвестные величины ε ос и dос. Выделением модуля коэффициента отражения  и его фазы ϕ V в этом выражении получают систему двух уравнений с двумя неизвестными, в которых должны быть известны измеренные значения модуля и фазы коэффициента отражения от крышки антенны, а также параметры крышки. В общем случае система двух уравнений решается графически или численно. Однако в частном случае, который обычно и используют на практике, решение записывается в явном виде.
и его фазы ϕ V в этом выражении получают систему двух уравнений с двумя неизвестными, в которых должны быть известны измеренные значения модуля и фазы коэффициента отражения от крышки антенны, а также параметры крышки. В общем случае система двух уравнений решается графически или численно. Однако в частном случае, который обычно и используют на практике, решение записывается в явном виде.
Антенну обычно выполняют таким образом, чтобы в нормальных условиях она была согласована наилучшим образом. Такие результаты можно получить, если толщина крышки равна половине длины волны сигнала в материале крышки. При этом крышка не оказывает никакого воздействия на падающую волну [11, с. 48].
Очевидно, что герметизирующая вставка, размещенная в горловине рупора и согласованная наилучшим образом, также не оказывает никакого действия на падающую волну.
Таким образом, коэффициент отражения от крышки со слоем осадков будет равен коэффициенту отражения от слоя осадков. Кроме того, обычно Zгаз≈Zвозд. В таком случае выражение (2) приводится к виду

Решение этого уравнения дает значения ε ос и dос:
Величины ϕ V и V вычисляют по выделенным и измеренным значениям  и
и  :
:
 используя соотношение
используя соотношение  , известное из конструктивных особенностей. Здесь
, известное из конструктивных особенностей. Здесь 
Постоянную разность фаз ϕ K между сигналами в канале гетеродина и в канале зондирующего сигнала учитывают при калибровке измерителя дальности, поэтому она не влияет на погрешность измерений.
Отсюда:
С учетом погрешности измерений из-за изменения электрической длины антенно-фидерного тракта расстояние до зондируемого материала:

Вычисление дополнительной задержки радиоволн при распространении в антенне, вызванной осадками на антенне по измерениям модуля и фазы низкочастотной составляющей разностного сигнала не менее чем на двух частотах диапазона перестройки частоты, позволяет исключить неоднозначность определения dос, кратную половине длины волны в материале осадков.
Без изменения сущности способа возможно широко используемое в измерительной технике измерение модуля и фазы коэффициента отражения от антенны с выделением падающих  и отраженных
и отраженных  волн циркуляторами или направленными ответвителями.
волн циркуляторами или направленными ответвителями.
Также без изменения сущности способа возможно вычисление дополнительной задержки радиоволн при распространении в антенне с использованием экспериментально измеренных зависимостей от толщины и диэлектрической проницаемости слоя осадков модуля и фазы коэффициента отражения от герметизирующей крышки или вставки.
Дополнительное уменьшение погрешности измерений, которая обусловлена изменением параметров антенно-фидерного тракта, достигают проведением дополнительных измерений, например, в стендовых условиях при калибровке измерителя дальности. Сущность дополнительных измерений заключается в моделировании изменения параметров антенно-фидерного тракта и исключении влияния на погрешность измерения указанных изменений. Калибровка измерителя расстояния заключается в подборе и запоминании уточненных значений τ а и ϕ а при отражении сигнала от антенны с эталонным отражателем.
Устройство для измерения расстояния и анализа электрофизических параметров зондируемого материала (фиг.4) содержит антенну 9, управляемый источник зондирующего сигнала (УИЗС) 10, вход которого соединен с первым выходом процессора 11, а выход соединен с последовательно соединенными делителем мощности (ДМ) 12 и направленным ответвителем (НО) 13, первый выход которого соединен с антенной 9, смеситель (См) 14, входы которого соединены соответственно со вторым выходом ДМ 12 и со вторым выходом НО 13, а выход смесителя соединен с двумя последовательно соединенными управляемыми фильтрами (УФ1) 15 и (УФ2) 16, каждый из которых имеет два входа и один выход, причем выход УФ2 16 соединен со входом схемы предварительной аналоговой обработки (СПАО) 17, выход которой через аналого-цифровой преобразователь (АЦП) 18 подсоединен ко входу процессора 11, второй выход процессора 11 соединен со входом схемы управления 19, первый и второй выходы которой соединены с управляющими входами соответствующих управляемых фильтров УФ1 15 и УФ2 16, причем первый УФ1 15 выполнен в виде дифференцирующего фильтра, второй УФ2 16 выполнен в виде фильтра нижних частот (ФНЧ), а схема управления 19 выполнена в виде коммутатора, управляющего фильтрами УФ1 15 и УФ2 16, третий выход процессора 11 является информационным выходом устройства.
Управляемый источник зондирующего сигнала может быть выполнен, например, в соответствии со схемами, представленными на фиг.5 и 6.
УИЗС, показанный на фиг.6, содержит: процессор 20, первый вход которого является входом УИЗС, первый выход соединен с последовательно включенными цифроаналоговым преобразователем (ЦАП) 21, усилителем 22, генератором, управляемым напряжением (ГУН) 23, НО 24, первый выход которого является выходом УИЗС, второй выход которого соединен с первым входом смесителя 25, второй вход которого соединен с опорньм генератором 26, фильтрующий усилитель 27, вход которого соединен с выходом смесителя 25, управляемый делитель частоты 28, первый вход которого соединен с выходом фильтрующего усилителя 27, второй вход соединен со вторым выходом процессора 20, а выход соединен с первым входом частотного детектора 29, второй вход которого соединен с выходом кварцевого генератора 30, а выход соединен со вторым входом процессора 20.
Эта схема работает в двух режимах. В первом режиме производится калибровка УИЗС, когда форма модулирующего напряжения подбирается таким образом, чтобы частота сформированного сигнала изменялась по ступенчатому линейному закону. Для этого процессор 20 при калибровке последовательно выдает на управляемый делитель 28 коды формируемой частоты и на ЦАП 21 - коды напряжения модуляции. Для каждого кода формируемой частоты в соответствии с кодом напряжения модуляции ЦАП 21 формирует модулирующее напряжение, которое через усилитель 22 воздействует на ГУН 23. Часть выходного сигнала с ГУН 23 через НО 24 поступает на смеситель 25, где преобразуется в промежуточную частоту с использованием сигнала опорного генератора 26. Сигнал промежуточной частоты через фильтрующий усилитель 27 и управляемый делитель частоты 28 поступает на частотный детектор 29, на второй вход которого поступает сигнал кварцевого генератора 30. Если частоты этих сигналов не совпадают, процессор 20 изменяет код напряжения модуляции до тех пор, пока не произойдет совпадение частот. Признаком этого события будет появление сигнала логической единицы на выходе частотного детектора 29 и, значит, на втором входе процессора 20. При этом процессор запоминает полученный код напряжения модуляции и повторяет всю процедуру для нового значения частоты формируемого сигнала. Калибровка заканчивается, когда данная процедура выполнена для всех частот заданного диапазона перестройки частоты. Во втором режиме работы УИЗС производится периодическое формирование кода модулирующего напряжения на первом выходе процессора 20 в соответствии с кодом частоты, поступающим на его первый вход.
УИЗС, выполненный по схеме фиг.6, содержит: цифровой синтезатор отсчетов сигнала (DDS синтезатор) 31 (например, серийно выпускаемый фирмой Peregrine), первый вход которого является входом УИЗС, а второй вход которого соединен с выходом опорного кварцевого генератора 32, делитель частоты 33, вход которого соединен с выходом DDS синтезатора 31, фазовый детектор 34 с двумя входами, первый из которых соединен с выходом делителя частоты 33, а второй соединен с делителем частоты 35, интегратор 36, соединенный своим входом с выходом фазового детектора 34, а выходом - со входом ГУН 37, НО 38, соединенный своим входом с выходом ГУН 37, первым выходом - со входом умножителя частоты 39, выход которого является выходом УИЗС, а вторым выходом - со входом делителя частоты 35.
Данная схема основана на стандартном синтезаторе частоты на основе контура ФАПЧ, включающем в себя фазовый детектор 34, интегратор 36, ГУН 37, НО 38 и делитель частоты 35. Управление частотой производится изменением частоты опорного сигнала, который поступает на вход фазового детектора 34 с DDS синтезатора 31 через делитель частоты 33. Код, управляющий синтезируемой частотой, поступает на вход DDS синтезатора 31, который формирует синусоидальный сигнал стабильной частоты на основе сигнала опорного кварцевого генератора 32. Выходной сигнал фазового детектора 34, пропорциональный разности фаз опорного сигнала и сигнала, поступившего с ГУН 37 через НО 38 и делитель частоты 35, управляет через интегратор 36 частотой ГУН 37 до наступления баланса фаз. Сигнал с ГУН 37 через направленный ответвитель 38 и умножитель частоты 39 поступает на выход УИЗС.
УИЗС выполнены с использованием типовых элементов по типовым схемам. Однако в первой схеме, показанной на фиг.5, скорость перестройки частоты в рабочем режиме определяется только динамикой перестройки ГУН 23. Поэтому она в этой схеме может быть максимально возможной, что выгодно с точки зрения уменьшения влияния фазовых шумов ГУН 23. Однако эта схема требует проведения периодических калибровок с прерыванием процесса измерения. В УИЗС, выполненный по схеме фиг.6, скорость перестройки частоты определяется динамикой перестройки контура ФАПЧ, поэтому она ниже, но при этом не требуется производить прерывание процесса измерения.
Устройство для измерения расстояния и электрофизических параметров зондируемого материала работает следующим образом. На управляющий вход УИЗС 10 поступают коды управления частотой зондирующего сигнала. С выхода УИЗС 10 основная часть мощности сформированного зондирующего частотно-модулированного сигнала через последовательно соединенные ДМ 12, НО 13 и антенну 9 излучается в направлении зондируемого материала. Принятый антенной 9 эхо-сигнал через второй выход НО 13 поступает на первый вход смесителя 14, на второй вход которого поступает часть мощности зондирующего частотно-модулированного сигнала со второго выхода ДМ 12. Сигнал разностной частоты через последовательно соединенные УФ 15, СПАО 16, АЦП 17 поступает на вход процессора 11. УФ 15 при соответствующей команде процессора 11 периодически выделяет либо информационную составляющую результирующего сигнала, соответствующую дальности до зондируемого материала, либо нулевые составляющие, обусловленные "паразитным" прохождением зондирующего сигнала в приемный тракт, отражением от неоднородностей антенно-фидерного тракта и слоя осадков на антенне. Для нулевой составляющей процессор 11 с помощью дискретного преобразования Фурье вычисляет спектр, сравнивает его с эталонным спектром, записанным при калибровке устройства, и вычисляет меру отличия этих спектров. Если мера отличия ниже контрольного уровня, процессор вычисляет расстояние и коэффициент отражения по измеренным спектрам информационной и нулевых составляющих. При превышении мерой отличия контрольного уровня процессор производит вычисления в соответствии с описанным способом измерения. При этом процессор вырабатывает команды управления на УИЗС 10 и УФ1 15 и УФ2 16.
УИЗС может быть выполнено в виде усилителя с калиброванным коэффициентом усиления.
Проведенное моделирование и испытания макетного образца измерителя расстояния показали, что предложенные способ (варианты) и устройство для его осуществления обеспечивают уменьшение погрешности измерения, которые обусловлены изменением параметров антенно-фидерного тракта больше чем в 4 раза и обеспечивают расширение функциональных возможностей за счет измерения коэффициента отражения от зондируемого материала.
Источники информации
1. А.С. СССР №1642250, МКИ G 01 F 23/28, опубл. 15.04.91 г., Б.И. №14.
2. Патент США №4665403 от 12.05.87 г.
3. А.С. СССР №1700379, МКИ G 01 F 23/28, опубл. 23.12.91 г., Б.И №47.
4. Патент США №5365178 от 15.11.94 г.
5. Патент США №5387918 от 7.02.95 г.
6. Патент США №5504490 от 4.04.96 г.
7. Патент США №5546088 от 13.08.96 г.
8. Патент США №6107957 от 22.08.2000 г.
9. Лобач В.Г. Радиолокационные измерения параметров слоистой среды. Изв. Вузов. Радиоэлектроника, 2002 г., №3.
10. Атаянц Б.А., Паршин В.С Распознавание случайных сигналов по спектральным моментам. Изв. Вузов. Радиоэлектроника, 1983 г., №12.
11. Бреховских Л.М. Волны в слоистых средах. Издательство Академии наук СССР, Москва. 1957 г.
12. Горелик А.Л, Скрипкин В.А. Методы распознавания. Уч. пособие для ВУЗов.: М. Высш. Школа., 1977 г., 208 с.

Изобретение относится к измерительной технике, в частности, к измерению расстояния и параметров зондируемого материала. Технический результат - снижение погрешности измерения при изменении параметров антенно-фидерного тракта и расширение функциональных возможностей за счет измерения электродинамических параметров зондируемого материала. Варианты способа включают выделение низкочастотных составляющих результирующего сигнала и выделение из них информационной составляющей, соответствующей дальности до зондируемого материала и составляющей, обусловленной отражениями от неоднородностей антенно-фидерного тракта. По выделенным составляющим вычисляют расстояние и коэффициент отражения от зондируемого материала в том случае, когда спектр выделенной "нулевой" составляющей соответствует спектру, записанному при калибровке. Если отличия спектра существенны, то в первом варианте способа вычисляют величины погрешностей измерений, обусловленные изменением параметров антенно-фидерного тракта, и учитывают их при расчете. Величины погрешностей вычисляют по градуировочным зависимостям от коэффициента асимметрии спектра. Во втором варианте способа коррекцию расстояния и коэффициента отражения выполняют сопоставлением спектра информационной составляющей со спектром сформированного эталонного сигнала. Изменением задержки и фазы добиваются наилучшего совпадения спектров и полученные при этом частоту и фазу сформированного сигнала принимают за искомые. В обоих вариантах способа определяют дополнительную задержку электромагнитных волн в антенне из-за налипания осадков и учитывают ее при коррекции результатов измерения расстояния и коэффициента отражения от зондируемого материала. Предложенный способ осуществляется устройством, содержащим антенну, управляемый источник зондирующего сигнала, соединенный с выходом процессора, делитель мощности, направленный ответвитель, смеситель, входы которого соединены с выходами направленного ответвителя и делителя мощности, последовательно соединенные управляемые дифференцирующий фильтр, фильтр низкой частоты, схему предварительной аналоговой обработки и аналого-цифровой преобразователь, выход которого соединен со входом процессора, схему управления, вход которой соединен с выходом процессора, а выходы с соответствующими управляемыми фильтрами. Способ калибровки устройства включает вычисление по выделенным нулевой и информационной составляющим соответствующих эталонных спектров, величину их искажений и корректирующего коэффициента. 4 н. и 6 з.п. ф-лы, 6 ил.
| US 6107957 А, 22.08.2000.RU 2023989 С1, 30.11.1994.US 5546088 А, 13.08.1996.US 5504490 А, 02.04.1996. |

