Изобретение относится к способам виброизоляции и может быть использовано при оборудовании рабочих мест пилотов, других членов экипажей, а также пассажиров вертолетов различного назначения.
Известно, что в полете фюзеляж вертолета вибрирует в широком диапазоне низких частот, 1÷100 Гц, особенно интенсивно в диапазоне инфранизких частот, 1÷10 Гц, наиболее вредных для безопасной и эффективной работы экипажа, а также комфорта пассажиров. Дозы вредного воздействия на человека вибраций в диапазоне инфранизких частот становятся критичными с увеличением продолжительности полета. Также известно, что виброизоляция в диапазоне инфранизких частот является наиболее труднорешаемой технической задачей для данного вида летательных аппаратов.
Известны способы (P. Konstanzer et al., Recent advances in Euro copter's passive and active vibration control: Proceedings of the 64th Annual Forum of the American Helicopter Society, Montreal, Canada, 2008, pp. 75-93) виброизоляции пилотов вертолетов, заключающиеся во введении упругих элементов в виброизолирующую систему сидений пилотов. Однако данные способы обеспечивают определенный эффект в диапазоне частот 20÷40 Гц и выше и, соответственно, неэффективны в диапазоне инфранизких частот.
Известен также способ (Р.Г. Камило, М.Т. Джонатан. Устройство для уменьшения вибрации кресла пилота вертолета. / Патент РФ 2504487, опубл. 20.01.2014, бюл. №2) виброизоляции пилотов вертолетов, наиболее близкий к заявляемому способу по технической результату, заключающийся во введении в виброизолирующую систему сиденья пилота подвески, снабженной упругим элементом и направляющим механизмом, структурные элементы которого образуют кинематическую цепь подвижных соединений для обеспечения вибрационного движения системы в заданном направлении и снижения интенсивности действия импульсных нагрузок, в формировании и активации сигнала управления параметрами упругого элемента. Способ дает определенный эффект, начиная с 7÷8 Гц и выше, причем качественную виброизоляцию - начиная с 12÷16 Гц. Следовательно, данный способ неэффективен в большей части диапазона частот, наиболее вредных и опасных для здоровья и функциональной деятельности пилотов вертолета, а также комфорта пассажиров. Основные причины неэффективности: (а) высокая жесткость упругого элемента в вертикальном (основном) направлении вибрационного движения системы; (б) ограничения амплитуд относительных перемещений и, соответственно, размеров рабочего пространства системы для обеспечения ее безопасной работы; (в) низкая механическая добротность системы вследствие структурной избыточности кинематической цепи.
Известна подвеска сиденья (О. Krejcir, Pneumaticka Vibroizolace, Doctorska disertacna prace. Liberec, Czech Republic, 1986), содержащая направляющий механизм, упругий элемент в виде бесштоковой пневматической пружины и устройство управления параметрами упругого элемента. Недостатки подвески: а) участок относительных перемещений, на протяжении которого подвеска может быть эффективной при вибрациях в диапазоне инфранизких частот, существенно меньше рабочего хода подвески; б) эффект нестабильный и зависит от конструктивных особенностей подвески; в) увеличение протяженности данного участка приводит к существенному росту габаритов подвески, несовместимому с требованиями к компактности и безопасности работы виброизолирующей системы пилота.
Наиболее близкой к заявляемой является подвеска (Р.Г. Камило, М.Т. Джонатан. Устройство для уменьшения вибрации кресла пилота вертолета. / Патент РФ 2504487, опубл. 20.01.2014, бюл. №2) для реализации известного способа, установленная под сиденьем пилота и содержащая направляющий механизм, упругий элемент в виде бесштоковой пневматической пружины и устройство управления параметрами упругого элемента. Данная подвеска неэффективна в большей части диапазона инфранизких частот, наиболее вредных и опасных для работы пилотов, а также комфорта пассажиров вертолетов. Основные причины неэффективности: а) высокая жесткость упругого элемента в вертикальном (основном) направлении вибрационного движения системы; б) низкая механическая добротность подвески вследствие структурной избыточности ее кинематической цепи.
Задача изобретения (технический результат): повышение качества и расширение диапазона частот виброизоляции при заданных ограничениях амплитуд относительных перемещений виброизолирующей системы.
Поставленную задачу решают с помощью способа, согласно которому в виброизолирующую систему сиденья пилота вводят подвеску, снабженную упругим элементом и направляющим механизмом, структурные элементы которого образуют кинематическую цепь подвижных соединений для обеспечения вибрационного движения системы в заданном направлении, формируют и активируют сигнал управления параметрами упругого элемента, вводят также дополнительный упругий элемент с регулируемой жесткостью, который присоединяют к системе без увеличения ее рабочего пространства в заданном направлении, параллельно действию упругого элемента, далее минимизируют суммарную жесткостью обоих упругих элементов на заданном интервале амплитуд относительных перемещений системы, определяемом условиями ее безопасной работы, затем повышают механическую добротность кинематической цепи путем формирования и активации дополнительного сигнала управления на частоте, меньшей основной частоты вибрационного движения системы. Кроме того, дополнительный упругий элемент собирают в виде модулей из взаимозаменяемых пружин знакопеременной жесткости и присоединяют к подвеске, по меньшей мере, не увеличивая структурной избыточности цепи, например, путем силового замыкания.
Технический результат достигается также тем, что известная подвеска сиденья пилота, содержащая направляющий механизм, упругий элемент и устройство управления параметрами упругого элемента, снабжена дополнительным упругим элементом с регулируемой знакопеременной жесткостью, установленным параллельно действию упругого элемента, без увеличения рабочего пространства подвески, а устройство управления содержит, по меньшей мере, два канала управления, один из которых имеет возможность активации на частоте, меньшей основной частоты вибрационного движения системы.
Сущность изобретения поясняется с помощью примеров осуществления способа, для чего представлены следующие иллюстрации:
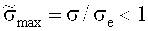
Фиг. 1. Общая структурная схема виброизолирующей системы.
Фиг. 2. Общий вид направляющего механизма подвески с дополнительным упругим элементом (вариант для летных испытаний).
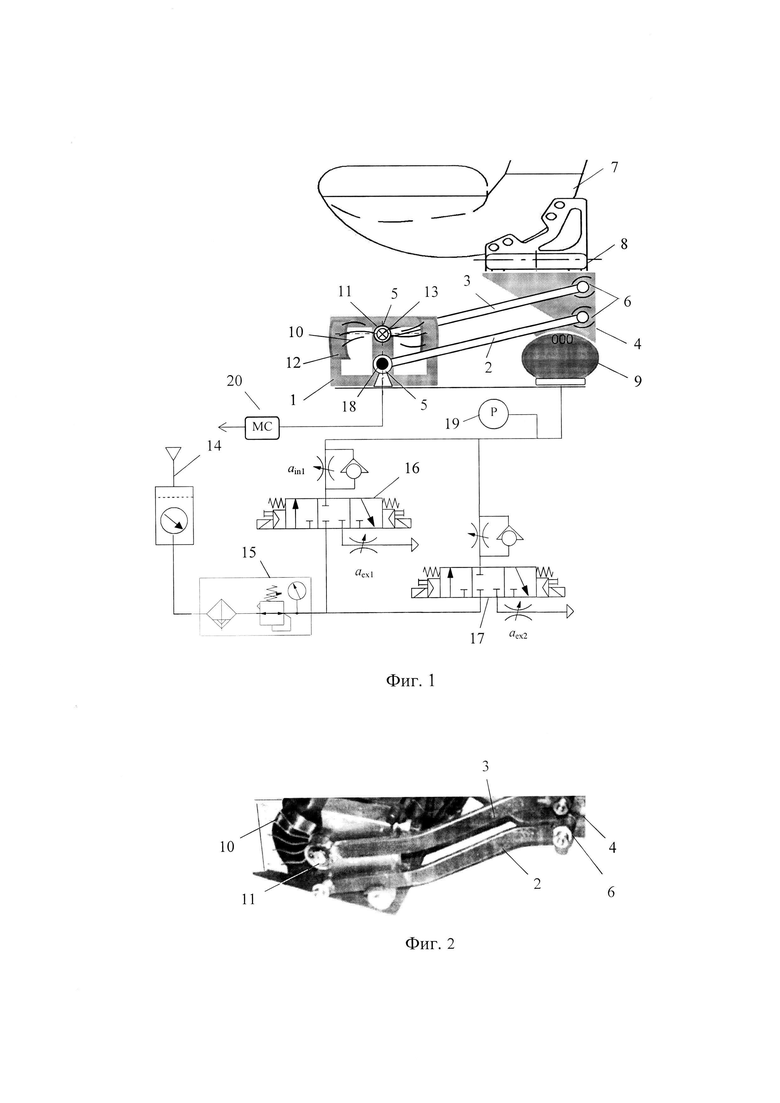
Фиг. 3. Упругая и прочностная характеристики дополнительного упругого элемента с регулируемой знакопеременной жесткостью.
Фиг. 4. Эффект снижения механической добротности кинематической цепи при вибрационном движении системы на инфранизких частотах.
Фиг. 5. Дополнительная активация системы на частоте, меньшей основной частоты вибрационного движения системы.
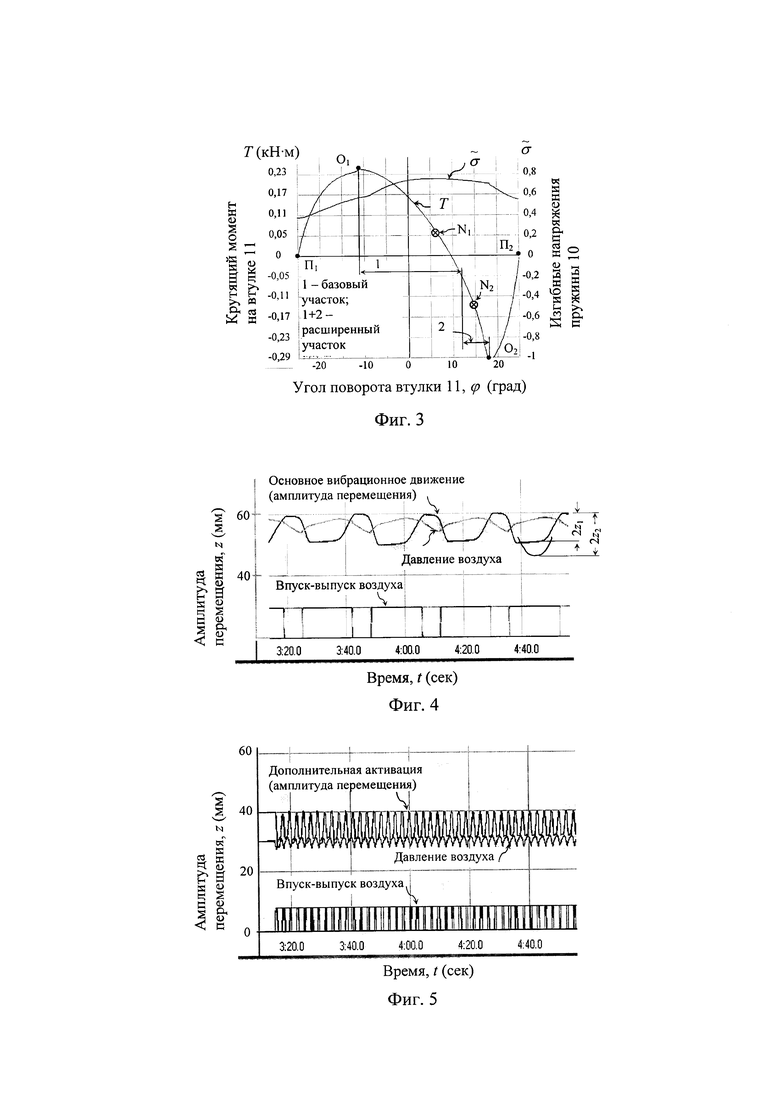
Фиг. 6. Характеристика подвески до и после введения дополнительной активации системы (результаты стендовых статических испытаний).
Фиг. 7. Поэтапное повышение качества и расширения диапазона частот виброизоляции (результаты стендовых динамических испытаний).
Фиг. 8. Снижение импульсных нагрузок на систему с воздушного демпфирования и упругого элемента.
Фиг. 9. Снижение импульсных нагрузок на систему с помощью с воздушного демпфирования и обоих упругих элементов.
Фиг. 10. Общий вид виброизолирующего сиденья для пилота (вариант для летных испытаний на вертолете Ми-8).
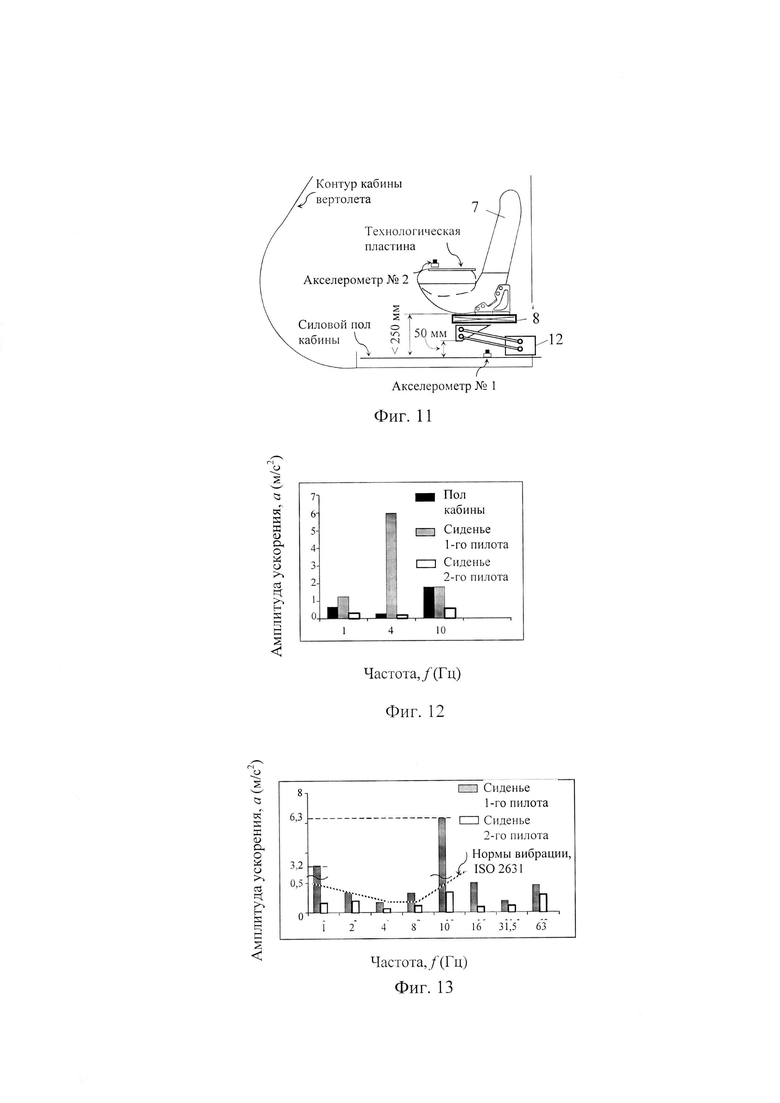
Фиг. 11. Схема объектов и средств для сравнительных летных испытаний.
Фиг. 12. Качество виброизоляции системы согласно способу в диапазоне инфранизких частот на одном из переходных режимов полета со скоростью 70 км/ч (результаты летных испытаний).
Фиг. 13. Качество виброизоляции системы согласно способу в диапазоне инфранизких частот в установившемся режиме полета с крейсерской скоростью 200±3 км/ч (результаты летных испытаний).
Подвеска сиденья для реализации способа (см. фиг. 1) содержит направляющий механизм, включающий основание 1, две пары рычагов 2 и 3, размещенных в параллельных плоскостях, симметрично продольной оси подвески, и образующих между собой и выходным структурным элементом 4 кинематическую цепь подвижных соединений с помощью подшипников 5 и 6, при этом элемент 4 снабжен площадкой для крепления посадочного места 7 сиденья с возможностью его перемещения и фиксации с помощью механизма 8 в процессе настройки, а также упругий элемент, выполненный, например, в виде безштоковой пневматической пружины 9. Наряду с этим подвеска снабжена дополнительным упругим элементом, выполненным, например, в виде двух съемных модулей, компактно размещенных в параллельных плоскостях на внешних поверхностях основания 1, при этом каждый модуль содержит пружины 10, центральную втулку 11 и корпус 12, а также устройство предварительной настройки пружины 10 (не показано), причем пружины 10 изготовлены в виде взаимозаменяемых наборов пластинок из пружинной стали, одни концы которых размещены в пазах, выполненных с определенным угловым шагом на центральной втулке 11, установленной в подшипниковой опоре 5 на основании 1, а другие концы - в пазах, выполненных с таким же угловым шагом на корпусе 12, с возможностью закритического упругого деформирования при сборке и настройке, причем втулки 11 снабжены, например, шлицами 13 для силового замыкания с рычагами 3, а корпусы 12 жестко связаны с основанием 1. Кроме того, подвеска снабжена устройством управления параметрами упругого элемента, содержащим блок 14 отбора воздуха из пневматической сети вертолета, блок 15 подготовки воздуха и, по меньшей мере, два канала управления, один из которых (условно, канал управления №1) содержит воздушный распределитель 16 с электромагнитным исполнительным механизмом, а другой (условно, канал управления №2) - воздушный распределитель 17 с электромагнитным исполнительным механизмом, при этом устройство снабжено датчиком 18 угловых перемещений рычагов 2 относительно основания 1, датчиком 19 воздушного давления на входе в пружину 9 и контроллером 20, состоящим из программируемого микропроцессора, снабженного источником питания и работающего по заданному набору алгоритмов.
Разработано несколько вариантов подвески. Изготовлена малая серия подвесок для их стендовых статических и динамических (вибрационных) испытаний; один из вариантов (см. фиг. 2) - для сравнительных летных испытаний в составе сидений для пилотов вертолетов Ми-8 различных модификаций, а также сидений для операторов, контролирующих процесс наземных работ, ведущихся с помощью вертолетов типа Ми-26. Разработана и апробирована методика онлайн проектирования конструкции и оптимизации параметров дополнительного упругого элемента в виде модуля с пружиной 10, знакопеременная жесткость ±k2(φ) которой регулируется в заданных пределах. Модуль рассчитан для применения в системах с определенной статической нагрузкой. Вариант модуля на фиг. 2 рассчитан на нагрузку до 0,75 кН и имеет габариты: высоту 120 мм, ширину 155 мм, глубину 25 мм (без учета длины шлицев и толщины крышки защитного кожуха). Комплект из двух модулей занимает менее 5÷7% общего объема подвески.
Пример упругой характеристики (крутящий момент Т) пружин 10, полученной по результатам проектирования, показан на фиг. 3. Здесь, на участках П1О1 и О2П2 - жесткость пружины 10 переменная «положительная», на участке O1O2 - переменная «отрицательная», в точках O1 и O2 - нулевая. При этом в процессе проектирования и оптимизации конструкции ведется контроль прочности пружин 10 (см. безразмерные изгибных напряжений 
Способ осуществляют с помощью подвески сиденья следующим образом. Каждый модуль с пружинами 10 собирают, предварительно настраивают и присоединяют попарно к подвеске так, чтобы их суммарная жесткость ±2k2(φ) обеспечивала выполнение одного из следующих условий:

где k1(z) - жесткость упругого элемента 9; Ф - передаточная функция, определяемая параметрами геометрических характеристик (рабочей длины пар рычагов 2 и 3) и требованиями компактности подвески; φ - параметрическая степень свободы (в данном случае угол возвратно-вращательного движения втулки 11 в процессе упругого деформирования пружины 10).
Пружины 10 устанавливают параллельно действию упругого элемента 9, причем так, чтобы не увеличить величину амплитуд относительных перемещений виброизолирующей системы, определяемых условиями ее безопасной работы, и, соответственно, размер рабочего пространства системы в вертикальном (основном) направлении z ее вибрационного движения.
Чтобы выполнить условия (1а) и (1б), минимизируют суммарную жесткость обоих упругих элементов в пределах участка 1 (см. упругую характеристику пружин 10 на фиг. 3) на протяжении всего рабочего хода z0 подвески, величина которого определяется условиями безопасной работой виброизолирующей системы пилота (см. ниже). В результате, жесткость подвески снижают до величины, необходимой для получения определенного качества виброизоляции в диапазоне инфранизких частот. Например, как показывают стендовые испытания, жесткость подвески может быть снижена в направлении z с k1≤4200÷5500 Н/м (при использовании бесштоковой пневматической пружины в качестве упругого элемента 9) до k≤420÷450 Н/м с помощью дополнительного упругого элемента с пружинами 10.
Для повышения качества виброизоляции пилотов в полосе инфрачастот 1÷4 Гц и менее регулирование и минимизация жесткости только в пределах участка 1 (см. фиг. 3) могут оказаться недостаточными. При вибрационном движении на таких частотах может потребоваться более «мягкая» подвеска. Тогда необходимо перейти с участка 1 упругой характеристики пружин 10 для движения относительно некоторой исходной позиции N1 на сегмент 2 и обеспечить движение относительно некоторой новой исходной позиции N2. Переход с базового участка 1 упругой характеристики на расширенный участок 1+2 регулирования «отрицательной» жесткости дополнительного упругого элемента осуществляют путем, например, изменения начального углового положения втулки 11 относительно рычагов 3 (см. фиг. 1), выбирая соответствующую последовательность шлицев 13 в процессе сборки и настройки подвески. Однако для обеспечения работы системы на сегменте 2 необходимо повысить механическую добротность подвески. Низкая механическая добротность из-за трения в подвижных соединениях направляющего механизма приводит, как иллюстрируется на фиг. 4, к частичному запиранию и, как следствие, к уменьшению амплитуды относительных перемещений, например, до величины 2z1. В этом случае повышают механическую добротность путем дополнительной активации упругого элемента 9. Покажем один из практических примеров. Для преодоления сопротивления, особенно при входном вибросигнале с малыми амплитудами, активируют колебания подвески на частоте, меньшей основной частоты вибрационного движения системы. На фиг. 5 показано, что в системе, вибрирующей с основной частотой f0=(0,5÷0,6) Гц, возбуждают дополнительные колебания с частотой f≈0,4±0,02 Гц и амплитудой порядка 4,5 мм. Из фиг. 6 следует, что безразмерная сила 
Фигура 7 иллюстрирует поэтапное повышение качества виброизоляции (по показателю «коэффициент передачи») и расширения диапазона инфранизких частот за счет совместного действия дополнительного упругого элемента и дополнительной активации. В ходе сравнительных стендовых испытаний, при заданном уровне внешнего вибрационного воздействия (см. график «входной вибросигнал»), установлено, что система-прототип, содержащая упругий элемент 9 и стандартный гидравлический демпфер, обеспечивает виброизоляцию, начиная с 7÷8 Гц. То есть система-прототип неэффективна в большей части диапазона инфрачастот, более того она усиливает входной вибросигнал в полосе частот 3÷7 Гц (см. график 1). Вместе с тем, система согласно способу обеспечивает виброизоляцию в диапазоне частот, начиная с 1,5÷2 Гц, благодаря совместной работе упругого элемента 9 и пружин 10 дополнительного упругого элемента (см. график 2). А введение дополнительной активации системы на частоте, меньшей основной частоты вибрационного движения, позволяет расширить диапазон частот качественной виброизоляции. График на фиг.3 показывает, что виброизоляцию возможно осуществить, начиная с 0,1 Гц, при этом эффективность системы может возрасти до 30 раз и более в сравнении с системой-прототипом, причем во всем диапазоне инфранизких частот, 1÷10 Гц, наиболее вредных и опасных для работы пилотов, а также комфорта пассажиров.
Присоединение дополнительного упругого элемента к подвеске выполняют путем силового замыкания с помощью шлицевого соединения 13. Это позволяет, по меньшей мере, не увеличить структурную избыточность (статическую неопределимость) кинематической цепи направляющего механизма подвески. Это, в свою очередь, способствует дополнительному повышению механической добротности системы и, соответственно, качества виброизоляции в расширенном диапазоне инфранизких частот при малых амплитудах вибраций. Для прогнозирования такой возможности, авторы разработали и апробировали формулу количественной оценки рациональных значений структурной избыточности, удобную для практических инженерных расчетов (все структурные характеристики - целые числа):

где m - число степеней свободы системы; nKC - общее число кинематических цепей; Hi - число степеней свободы одного подвижного соединения с i-й подвижностью; S - общее число степеней свободы во всех соединениях; qRC - величина структурной избыточности.
Используя формулу (2), возможно показать, что в системе-прототипе, например, с одной степенью свободы, m=1, кинематическая цепь имеет структурную избыточность qRC=21, т.е. 21 раз статически неопределимая. Вместе с тем, в системе согласно способу, также с одной степенью свободы, m=1, цепь имеет структурную избыточность на порядок ниже: qRC=3, даже после присоединения дополнительного упругого элемента (в виде комплекта из двух модулей с пружинами 10) к подвеске путем силового замыкания. При этом для сборки цепи могут быть использованы четыре подвижных соединения 5, ΣH1=4, с одной степенью свободы каждый (радиальные подшипники) и четыре подвижных соединения 6, ΣH3=12, с тремя степенями свободы каждый (сферические подшипники). Такое силовое замыкание, по меньшей мере, не увеличивает структурной избыточности цепи. С помощью формулы (2), путем перебора типов подшипников для соединений 5 и 6, получают статически определимую кинематическую цепь, т.е. qRC=0.
Рассмотрим особенности активного управления параметрами упругого элемента 9. На фиг. 7 видно, что система согласно способу стала, в отличие от системы-прототипа, безрезонансной во всем исследуемом диапазоне частот. Причем это достигается без внешнего механизма демпфирования (без гидравлического демпфера), который является необходимым структурным элементом системы-прототипа. То есть внешний демпфер «мягкой» системе не требуется. В установившемся движении не требуется также активное управление «мягкой» системой. При этом оба канала управления закрыты, если траектория движения системы находится в окрестностях точки N1 или N2 (см. фиг. 3). Активное управление (например, непрерывно работает канал №1 с распределителем 16) применяют для того, чтобы препятствовать дрейфу исходной позиции в сторону точки O2. Из решения уравнения неразрывности получен безразмерный критерий (соотношение площади проходного сечения распределителя 16 и рабочей камеры упругого элемента 9, выполненного в виде безштоковой пневматической пружины):

При проектировании реальной системы значения критерия (3) уточняют путем оптимизации соотношения между рабочими параметрами распределителей, применяемых на практике, и интенсивностью входного воздействия на систему при определенных значениях относительных скоростей (отклика системы) и времени переходных процессов.
Некоторое демпфирование «мягкой» безрезонансной системе требуется только при скачкообразном изменении статической нагрузки, например: (а) при внезапном покидании пилотом своего сиденья и/или размещении на нем другого пилота, вес которого резко отличается от веса предыдущего пилота; (б) в аварийных ситуациях (аварийная посадка и т.п. нештатные летные ситуации). Эффективное решение такой частной задачи возможно, например, с помощью переменной структуры воздушного демпфирования системы. На фиг. 8 для варианта, в котором упругий элемент 9 выполнен в виде безштоковой пневматической пружины, показано, что при некоторых значениях скоростей относительного движения системы амплитуда относительных перемещений нарастает. Это может привести к выходу системы на ограничитель хода и импульсному воздействию на нее. При этом работа упругого элемента 9 только при управлении по каналу №1 (через распределитель 16) не в состоянии предотвратить выход системы на ограничитель хода. Вместе с тем управление по каналу №2 (через распределитель 17) позволяет позиционировать систему, содержащую оба упругих элемента, практически мгновенно (см. фиг. 9). В примерах на фиг. 8 и фиг. 9 стендовые испытания выполнены при внешнем вибрационном воздействии с амплитудой перемещения до 100 мм, что в несколько раз превышает величину хода подвески. При этом соотношение между величиной площади проходного сечения распределителя 17 и рабочей камеры пневматической пружины (безразмерный критерий эффективного воздушного демпфирования) составляло:

На фиг. 12 и фиг. 13 показаны результаты инструментального исследования эффективности виброизолирующей системы в полете. Использован виброприбор с двумя акселерометрами, один из которых закреплялся на полу кабины, а второй, попеременно, устанавливался на технологические пластины, размещенные на эластичных подушках сидений первого и второго пилотов. Испытания выполнены на вертолетах, вышедших из планового капитального ремонта. Пример компоновки варианта системы согласно способу для оборудования рабочего места второго пилота вертолета Ми-8 показан на фиг. 10. Основные задачи летных испытаний: (а) сравнение качества системы-аналога (рабочее место первого пилота) и системы согласно способу (рабочее место второго пилота); (б) анализ качества обеих систем на соответствие нормам согласно международному стандарту ISO 2631. Схема размещения оборудования представлена на фиг. 11. Здесь показано, что наибольший габарит подвески для реализации способа не превышает 250 мм. Ход подвески в вертикальном направлении не превышал 50 мм. Это важно потому, что, как было установлено в ходе стендовых испытаний и подтверждено результатами летных испытаний, ход не может превышать 50±5 мм, т.к. в противном случае снижается безопасность работы пилота, а управление вертолетом ухудшается. В частности, по докладам пилотов-испытателей, они «теряют горизонт» на определенных режимах полета, если амплитуда относительных перемещений системы превышает 25 мм. Очевидно, что при таких ограничениях на величину относительных перемещений система-аналог или система-прототип не могут быть эффективными, особенно в диапазоне инфранизких частот. Поэтому на переходном режиме полета виброизолирующая система первого пилота усиливает входной вибросигнал на частотах 1, 4 и 10 Гц. При этом виброизолирующая система второго пилота показывает высокую эффективность в данном диапазоне частот. В установившемся режиме виброизолирующая система первого пилота неэффективна в диапазоне частот 1, 8 и 10 Гц и, следовательно, не соответствует требованием стандарта ISO 2631. При этом виброизолирующая система второго пилота показывает высокую эффективность в исследуемом диапазоне частот. Виброизолирующая система второго пилота снижает входной вибросигнал, по меньшей мере, в 3÷30 раз эффективнее системы первого пилота и обеспечивает качество, соответствующее нормам вибрационной безопасности и функционального комфорта членов экипажей и пассажиров вертолетов, в том числе в диапазоне наиболее вредных и опасных инфранизких частот.
Таким образом, заявляемый способ с помощью подвески позволяет решать задачу повышения качества и расширения диапазона частот виброизоляции пилотов, а также пассажиров вертолетов при заданных ограничениях амплитуд относительных перемещений системы. Заявляемый способ и подвеска для его реализации могут быть эффективными при совершенствовании существующих систем и при создании перспективных разработок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА КРЕСЛА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2024 |
|
RU2837435C1 |
| СПОСОБ ВТОРИЧНОГО ПОДРЕССОРИВАНИЯ ТЕЛЕЖКИ ВАГОНА ВЫСОКОСКОРОСТНОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2015 |
|
RU2597428C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛИРУЮЩИЙ МЕХАНИЗМ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2019 |
|
RU2753061C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ПОДВЕСКИ КОМПАКТНОГО СИДЕНЬЯ | 2001 |
|
RU2216461C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Способ оптимизации системы подрессоривания кабины транспортно-технологических машин | 2020 |
|
RU2754014C1 |

Изобретение относится к области авиации, в частности к способам и устройствам виброизоляции рабочих мест пилотов летательных аппаратов. Способ виброизоляции пилота вертолета заключается в том, что вводят в подвеску дополнительный упругий элемент с регулируемой жесткостью параллельно действию первого упругого элемента. Минимизируют суммарную жесткость обоих упругих элементов на заданном интервале амплитуд относительных перемещений системы, определяемом условиями ее безопасной работы. Формируют и активируют дополнительный сигнал управления параметрами упругого элемента на частоте, меньшей основной частоты собственных колебаний системы. Подвеска сиденья содержит направляющий механизм, упругий элемент и устройство управления параметрами упругого элемента. Подвеска снабжена дополнительным упругим элементом с регулируемой знакопеременной жесткостью, установленным параллельно действию первого упругого элемента. Устройство управления содержит два канала, один из которых имеет возможность активации на частоте, меньшей основной частоты вибрационного движения системы. Достигается расширение диапазона частот виброизоляции при заданных ограничениях амплитуд относительных перемещений. 2 н. и 1 з.п. ф-лы, 13 ил.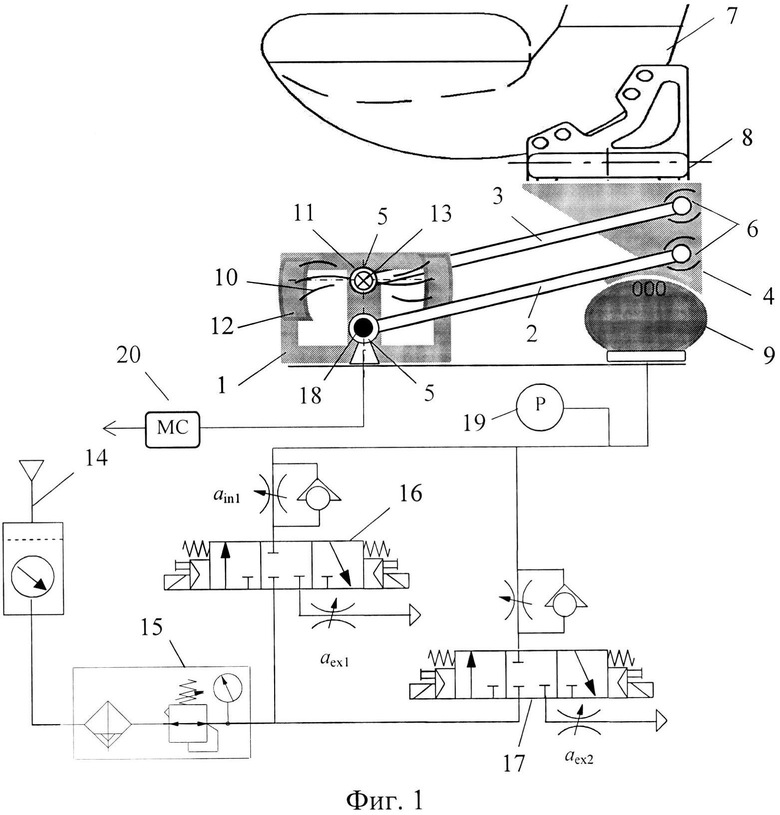
1. Способ виброизоляции пилота вертолета, согласно которому в виброизолирующую систему сиденья вводят подвеску, снабженную упругим элементом и направляющим механизмом, структурные элементы которого образуют кинематическую цепь подвижных соединений для обеспечения вибрационного движения системы в заданном направлении, а также формируют и активируют сигнал управления параметрами упругого элемента, отличающийся тем, что вводят также дополнительный упругий элемент с регулируемой жесткостью, который присоединяют к системе без увеличения ее рабочего пространства в заданном направлении, параллельно действию упругого элемента, далее минимизируют суммарную жесткость обоих упругих элементов на заданном интервале амплитуд относительных перемещений системы, определяемом условиями ее безопасной работы, затем повышают механическую добротность кинематической цепи путем формирования и активации дополнительного сигнала управления на частоте, меньшей основной частоты вибрационного движения системы.
2. Способ по п. 1, отличающийся тем, что дополнительный упругий элемент собирают в виде модулей из взаимозаменяемых пружин знакопеременной жесткости и присоединяют к подвеске, по меньшей мере, не увеличивая структурной избыточности цепи, например, путем силового замыкания.
3. Подвеска сиденья для реализации способа по п. 1 или 2, содержащая направляющий механизм, упругий элемент и устройство управления параметрами упругого элемента, отличающаяся тем, что она снабжена дополнительным упругим элементом с регулируемой знакопеременной жесткостью, установленным параллельно действию упругого элемента, без увеличения рабочего пространства подвески, а устройство управления содержит, по меньшей мере, два канала, один из которых имеет возможность активации на частоте, меньшей основной частоты вибрационного движения системы.
| СПОСОБ ПОЛУЧЕНИЯ АНИЗОТРОПНОГО НЕФТЯНОГО ВОЛОКНООБРАЗУЮЩЕГО ПЕКА ЭКСТРАКЦИЕЙ ТОЛУОЛОМ В СВЕРХКРИТИЧЕСКИХ УСЛОВИЯХ | 2012 |
|
RU2502782C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| СИДЕНЬЕ ОПЕРАТОРА САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ТЕХНИКИ | 2004 |
|
RU2270108C1 |
| US 2011024601 A1, 03.02.2011 | |||
| US 3420475 A, 07.01.1969. | |||

