Изобретение относится к области динамики машин, оборудования и аппаратуры, работающих в условиях интенсивного динамического нагружения. Известны многие способы и средства защиты объектов от силовых и кинематических возмущений, что связано с введением или формированием специальных устройств в виде амортизаторов, демпферов, рессор и специальных устройств с использованием рабочих сред и электромагнитных эффектов.
Динамические гасители колебаний представляют собой достаточно автономную область виброзащитных устройств, полезные функции которых реализуется в том, что внешние силы, действующие на объект, уравновешиваются инерционными силами, возникающими при воздействиях элементов.
Известно изобретение RU 157103 U1, МПК F16F 15/00, опубликовано 20.11.2015, патент на полезную модель "Динамический гаситель колебаний". Полезная модель относится к динамическим гасителям в структуре которых используются рычажные связи, обеспечивающие не только взаимодействие элементов, но и размещение на звеньях механизмов дополнительных масс. Динамический гаситель имеет пневмо-механическую упругую систему, состоящую из рабочей и демпферной камер, обеспечивающих возможность самоперестройки при переходе из режима низкочастотных воздействий к восприятию внешнего возмущения в области высоких частот. Недостатком данного изобретения является отсутствие возможностей влиять на настройку системы к реализациям режимов динамического гашения на основе использования дополнительных масс, которые жестко закреплены на концах звеньев.
Известно изобретение RU 133232 U1, МПК F16F 7/10, опубликовано 10.10.2013, патент на полезную модель "Устройство для гашения колебаний". Устройство для гашения колебаний представляет по своей сути рычажный динамический гаситель колебаний. Эффект динамического гашения колебаний обеспечивается дополнительной массой, закрепленной на рычаге второго рода. Точка вращения рычага опирается на вибрирующую поверхность, что создает необходимое уменьшение колебаний объекта при кинематическом возмущении в области частот динамического гашения. Основной недостаток устройств заключается в узости частотного диапазона динамического гашения колебаний и запирании устройства на высоких частотах.
Известно устройство для гашения колебаний на техническом объекте при действии вибраций основания, представленное авторским свидетельством на изобретение SU 540081 A1, МПК F16F 5/00, опубликовано 25.12.1976 "Двухкаскадное устройство для гашения вибраций". Устройство представляет управляемую систему, в которой технический объект защищается от вибраций упругой пружиной постоянной жесткости и активным элементом в виде гидроцилиндра, золотник которого управляется на основе сигнала, поступающего от датчика динамического состояния объекта. Основной недостаток изобретения заключается в необходимости обеспечения высоких требований к условиям эксплуатации электрогидравлического блока, находящегося под действием внешних возмущений.
Известно изобретение RU 2475658 C2, МПК F16F 7/10, опубликовано 20.02.2013, "Способ регулирования жесткости виброзащитной системы и устройство для его осуществления". Способ предлагает реализацию режима динамического гашения колебаний объекта защиты со стороны опорной поверхности с помощью присоединяемого дополнительного твердого тела, на котором установлены два вращающихся в разные стороны рычага. Каждый рычаг приводится во вращения вокруг своей оси с помощью электродвигателя. Дисбаланс на вращающемся рычаге может менять свое расстояние от оси вращения, что обеспечивается соответствующей системой управления. Недостаток системы заключается в сложности обслуживания и зависимости от параметров подаваемой электроэнергии; изменение скорости вращения двигателя приводит к выходу из режима динамического гашения колебаний. Существенным недостатком является возможность сбоя разности фаз во вращающихся рычажных механизмах.
В качестве прототипа выбирается вышеприведенный способ регулирования и устройство для его осуществления в силу наличия в нем определенных достоинств, которые могут быть развиты, а использованный подход улучшен.
Предлагаемое изобретение предназначено для решения задач управления динамическим состоянием защиты технического объекта. Такого рода задачи характерны для вибрационной защиты прецизионного оборудования, приборов и аппаратуры.
Задача решается следующим образом.
Способ динамического гашения колебаний технического объекта, включающий гашение колебаний, с помощью системы упругих элементов и масс. Регистрируют колебания основания, промежуточного тела и технического объекта с помощью датчиков. Полученную информацию передают в блок управления, после обработки информации проводят гашения колебаний, используя сервопривод и установку на промежуточное тело пилон (опора) с рычагом, один конец рычага соединяют упругим элементом с промежуточным телом и пилоном с техническим объектом. Другой конец рычага устанавливают массу, которую соединяют упругими элементами с промежуточным телом и техническим объектом. На самом конце рычага устанавливают сервопривод с дополнительной массой и рычагом.
Устройство для осуществления способа динамического гашения колебаний технического объекта, состоит из промежуточного тела, дополнительных масс и упругих элементов. На техническом объекте, промежуточном теле и основании устанавливаются датчики регистрации колебаний. На промежуточном теле также имеется пилон (опора) с рычагом, один конец рычага соединен упругим элементом с промежуточным телом и с помощью пилона с техническим объектом. На другом конце рычага имеется масса, соединенная упругим элементом с техническим объектом и промежуточным телом, причем на самом конце рычага установлены сервопривод и дополнительная масса с рычагом.
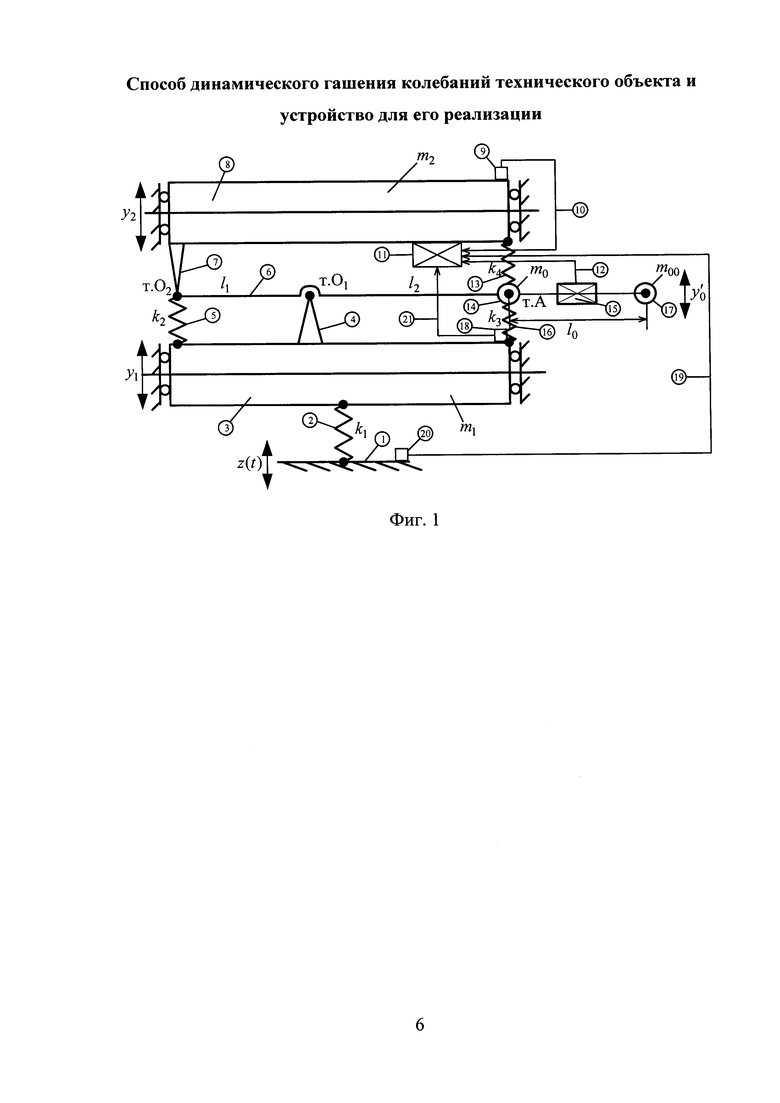
На фиг. 1 показана схема динамического гашения колебаний технического объекта.
На фиг. 1 обозначены: технический объект 8 в виде твердого тела массой m2 опирается через систему упругих элементов 2, 5, 13, 16 с жесткостями k1, k2, k4 и k3 соответственно на основание 1. Для связи промежуточного тела 3 с рычагом 6 используется пилон (опора) 4. При этом технический объект 8 также соединен пилоном 7 с рычагом 6. Упругий элемент 5 в точке O2 опирается на рычаг 6. Рычаг 6 имеет две точки контактов с пилонами 7 и 4 соответственно в тт. O2, O1. На конце рычага 6 размещается масса 14 (m0); на продолжении рычага 6 расположена также дополнительная масса 17 массой m00, которая может перемещаться относительно т. А рычага 6 с помощью устройства изменения длины плеча сервопривода 15. Управление виброзащитной системой осуществляется блоком управления 11. Блок управления 11 получает информацию о состоянии технического объекта 8, промежуточного тела и основания через датчики 9, 18, 20. Сбор информации и питание сервопривода 15 осуществляется коммуникациями 10, 12, 19, 21.
Способ управления динамическим состоянием технического объекта реализуется при возникновении вибраций основания 1. При вибрациях основания 1 колебания передаются через упругий элемент 2 жесткостью k1 на промежуточное тело 3 массой m1. Промежуточное тело через пружину 5 жесткость k2 в точке O2 передает динамическое усилие техническому объекту защиты 8 через пилон 7. Одновременно на промежуточном теле 3 в точке O1 установлен пилон 4 с рычагом 6.
Промежуточное тело 3 передает колебание через упругий элемент 16 жесткостью k3 масса 14 массой m0, установленному на конце рычага 6 (точка А). От рычага 6 динамические усилия через упругий элемент 13 жесткостью k4 и пилон 7 создают воздействия, определяющие динамическое состояние технического объекта 8. Дополнительным фактором, влияющим на распределении сил, является дополнительная масса 17 массой m00.
В целом технический объект с присоединенными элементами образует механическую колебательную систему с двумя степенями свободы, в которой кинематическое внешнее воздействие вызывает движение элементов системы, которые связаны между собой и при определенных условиях обеспечивают параметры движения по отдельным точкам в режимах динамического гашения колебаний.
Такой режим обеспечивает система управления перемещением дополнительной массы m00. Необходимый режим работы достигает в режиме самонастройки на основе использования информации от датчиков динамического состояния технического объекта и датчиков изменения вибраций основания и промежуточного тела.
В приложении дано теоретическое обоснование реализации и эффективности работы предлагаемого способа динамического гашения колебаний технического объекта и устройство для его реализации.
ПРИЛОЖЕНИЕ
Теоретическое обоснование
На Рис. 1 рассматривается механическая колебательная система с двумя степенями свободы как расчетная схема виброзащитной системы, состоящей из объекта защиты массой m2, промежуточного инерционного устройства с массой m1. Объекта защиты m2 и промежуточное устройство m1 соединяются между собой с помощью рычага, который имеет вращательные кинематические пары с пилонами, установленными соответственно на объекте защиты и промежуточной массе m1, как показано на Рис. 1.
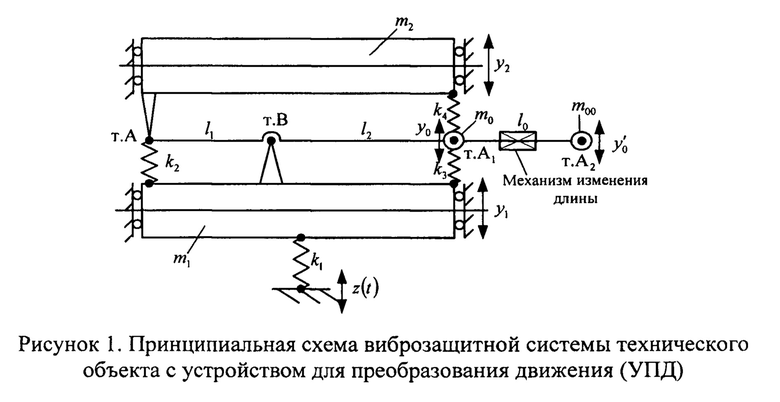
Объект защиты упруго опирается на промежуточное устройство m1 и рычаг (m0) с помощью упругих элементов с жесткостями k2, k3, k4. Промежуточное устройство m1 подпружинено по отношению к основанию упругим элементом с жесткостью k1. Движение системы описывается в координатах y1, y2, y'0. Плечи рычажного механизма обозначены как l1, l2, l0 (l1=АВ, l2=ВА1, l0=А1А2). Устройство виброзащитной системы предполагает наличие двух сосредоточенных масс mо и m00. Первая масса используется для предварительной настройки в предполагаемом диапазоне внешних воздействий со стороны основания или опорной поверхности. Вторая масса m00 имеет возможность изменять свое положение относительно точки A1 путем изменения длины плеча l0, что достигается с помощью сервопривода, управляемого специальной системой, реализующей алгоритм обработки информации о динамическом состоянии элементов рассматриваемой системы.
По-существу, установление настроечной массы m00, является введением в систему дополнительной инерционной связи. Ниже представлены детали системы на основе методов структурного математического моделирования [1÷3].
1. Введение дополнительной инерционной связи т0о изменяет выражения для кинетической энергии системы

С учетом особенностей сложения переносного и относительных движений получим для координаты  соотношение:
соотношение:

принимаем  , где
, где  .
.
Таким образом выражение для кинетической энергии системы опеределяется:

Выражение для потенциальной энергии в данном случае:

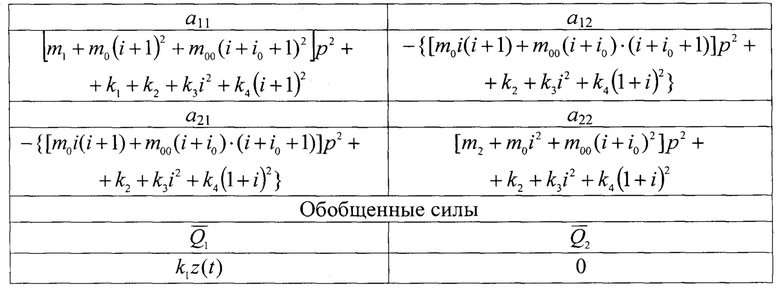
Коэффициенты уравнений движения системы с учетом т0о в координатах  ,
,  приводятся в таблице 1.
приводятся в таблице 1.
Таблица 1
Коэффициенты уравнений движения при введении дополнительной массы m00 в координатах ,
2. Запишем передаточные функции системы при введении дополнительной массы m00


где 
- характеристическое частотное уравнение при введенной дополнительной массе m00.
3. Система с дополнительной массой m00 при кинематическом возмущении z(f) имеет режимы динамического гашения колебаний по координатам  ,
,  соответственно
соответственно


Передаточная функция межпарциальной связи имеет вид:

При i=0, i0=0 выражение (28) приводится к виду

На Рис. 2 приведены амплитудно-частотные характеристики для модельной задачи.
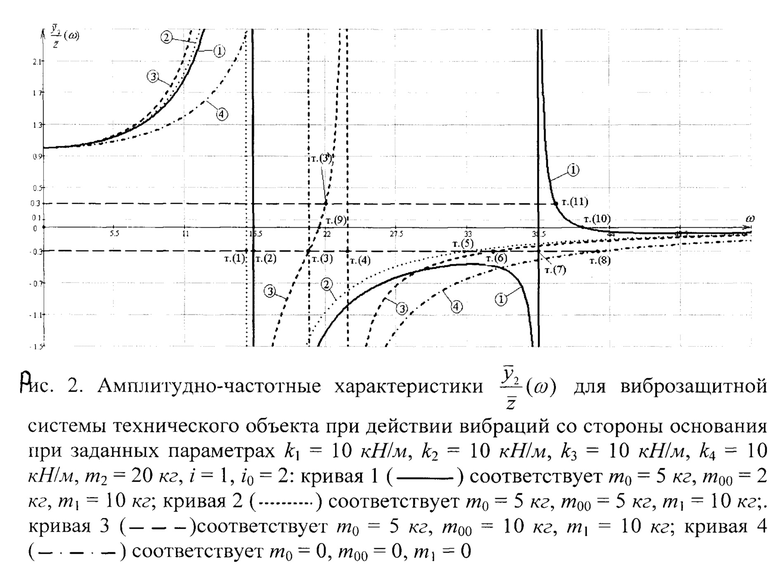
Амплитудно-частотных характеристик (АЧХ) представляют собой отношение амплитуды колебаний на объекте защиты m2 (координата y2) к внешнему воздействию в виде смешения или амплитуда вибраций основания z(t). Если отношение амплитуд колебаний меньше единицы, то наблюдается снижение внешних возмущений. Кривая 2 соответствует условию  .
.
Такая кривая отражает частные свойства системы, т.(1) соответствует частоте собственных колебаний для этого случая. Линия уровня виброзащиты (кривая 0) отражает ограничения на параметры снижения амплитуды колебаний объекта. Пересечение кривой 0 и АЧХ определяет диапазон частот, при котором возможно снижения действия вибраций. Вырожденный случай очевидно нерационален для работы оборудования.
Режим динамического гашения колебаний для случая, представляемого кривой 1, реализуется на частоте, соответствующей т.(10) на оси абсцисс. Система эффективно работает в режиме уменьшения колебаний на объекте правее т.(10). Если ориентироваться на предельные нормы снижения вибрации до 0.3 (кривые 0), то режим эффективной виброзащиты начинается с т.(11). Кривая 1 построена при значении настроечного параметра m00=2 кг. Если настроечный параметр m00=10 кг (кривая 3), то частота динамического гашения определяется положением т.(9) на оси абсцисс. В этом случае частота динамического гашения находится между частотами собственных колебаний (тт.(2) и (4)). Частотный диапазон эффективной защиты начинается с т.(3), которая продолжается до т.(3'), затем режим приемлемого рабочего состояния начинается с т.(6). Точка т.(6) находится значительно левее, чем т.(10). Таким образом величина m00 как настроечный параметр существенным образом увеличивает диапазон частот эффективной защиты.
Промежуточное значение настроечного параметра дают соответствующие коррекции величины частотного диапазона эффективной защиты. Важным обстоятельством является то факт, что увеличение m00 или эквивалентное увеличение передаточного отношения i0, приводят к формированию частотного диапазона, в рамках которого будет соблюдаться условие поддержания коэффициента снижения амплитуды внешних воздействий.
Система управления обеспечивает поднастройку параметров динамического состояния в расширенном частотном диапазоне за счет сдвига частот динамического гашения колебаний в сторону более низких значений частот.
При построении алгоритма управления динамическим состоянием частота динамического гашения по координате y2 (то есть положение объекта) является предварительным ориентиром, поскольку диапазон эффективной защиты будет зависеть от крутизны наклона линий АЧХ. В качестве рабочего диапазона выбирается частота, определяемая положением точки пересечения АЧХ при соответствующем значении m00 и линии уровня уменьшения амплитуд колебаний. На Рис. 2 приведены данные характеризующие свойства системы при промежуточных значениях m00, информация о параметрах системы приводится в подрисуночной надписи.
Использованная литература
1. Елисеев С.В., Резник Ю.Н., Хоменко А.П. и др. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов. Иркутск: ИГУ, 2008. 523 с.
2. Елисеев С.В., Резник Ю.И., Хоменко А.П. Мехатронные подходы в динамике механических колебательных систем. - Новосибирск: Наука, 2011. - 384 с.
3. Елисеев С.В., Артюнин А.И. Прикладная теория колебаний в задачах динамики линейных механических систем. Новосибирск: Наука, 2016. 459 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ОБЪЕКТА ЗАЩИТЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2662619C2 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2648661C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ | 2015 |
|
RU2604250C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
Группа изобретений относится к области машиностроения. Регистрируют колебания основания, промежуточного тела и технического объекта с помощью датчиков. Гасят колебания посредством сервопривода и установки на промежуточном теле пилона с рычагом. Один конец рычага соединяют упругим элементом с промежуточным телом и пилоном с техническим объектом. На другой конец рычага устанавливают массу, соединенную упругими элементами с промежуточным телом и техническим объектом. Устройство содержит датчики регистрации колебаний. Сервопривод и дополнительная масса с рычагом установлены на конце рычага. Достигается улучшение управления динамическим состоянием защиты объекта. 2 н.п. ф-лы, 1 ил.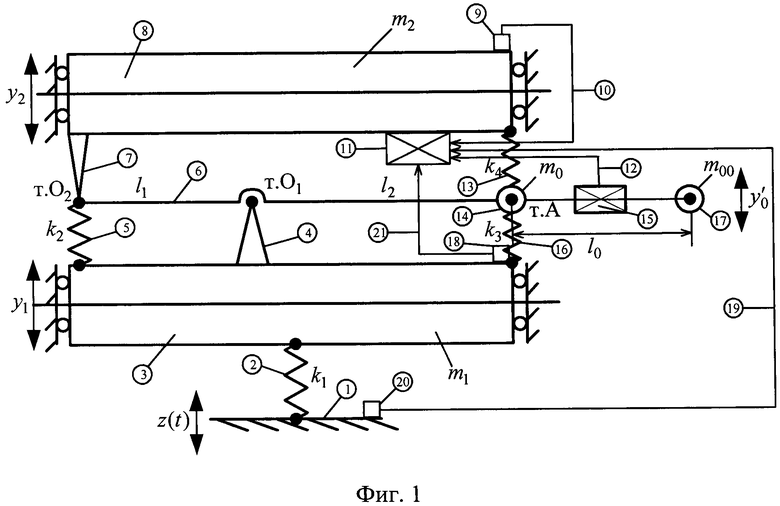
1. Способ динамического гашения колебаний технического объекта, включающий гашение колебаний, используя систему упругих элементов и масс, отличающийся тем, что регистрируют колебания основания, промежуточного тела и технического объекта с помощью датчиков и передают информацию в блок управления, после обработки информации проводят гашения колебаний, используя сервопривод и установку на промежуточное тело пилона (опоры) с рычагом, причем один конец рычага соединяют упругим элементом с промежуточным телом и пилоном с техническим объектом, на другой конец рычага устанавливают массу, которую соединяют упругими элементами с промежуточным телом и техническим объектом, кроме того, на самом конце рычага устанавливают сервопривод с дополнительной массой и рычагом.
2. Устройство для осуществления способа динамического гашения колебаний технического объекта, состоящее из промежуточного тела, массы, дополнительной массы и упругих элементов, отличающееся тем, что на техническом объекте, промежуточном теле и основании устанавливают датчики регистрации колебаний, а на промежуточном теле установлен пилон (опора) с рычагом, на одном конце рычаг соединен упругим элементом с промежуточным телом и с помощью пилона - с техническим объектом, на другом конце рычага имеется масса, соединенная с помощью упругих элементов с техническим объектом и промежуточным телом, причем на самом конце рычага установлены сервопривод и дополнительная масса с рычагом.
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| US 4793653 A, 27.12.1988 | |||
| JP 2007247733 A, 27.09.2007 | |||
| Дисковый прерыватель постоянного тока | 1922 |
|
SU2282A1 |

