Техническое решение относится к горному делу и строительству, а именно к дистанционной регистрации и измерению параметров вращения, внедрения, извлечения исполнительных органов горных и строительных машин в процессе их воздействия на разрабатываемую геосреду и может найти применение в лабораторных и натурных исследованиях горных и строительных машин для оценки эффективности их работы и оптимизации энергетических и технологических параметров этих машин.
Известен способ измерения параметров вращения горных объектов по патенту РФ №2034145, кл. Е21С 35/24, Е21В 45/00, опубл. 30.04.1995 г., включающий передачу воздействия параметра на чувствительные элементы, обработку полученных на выходах чувствительных элементов сигналов и индикацию значения параметра вращения. Воздействие параметра вращения преобразуют в деформацию растяжения-сжатия чувствительных элементов из электропроводящего эластичного упругого материала, через которые пропускают электрический ток, а о параметре вращения судят по величине электрического сопротивления деформируемых чувствительных элементов.
Общими признаками аналога и предлагаемого способа являются: возможность измерения параметров вращения горных объектов, заключающаяся в передаче воздействия параметра вращения на чувствительные элементы, обработка сигналов и регистрация значений параметров вращения.
Недостатками известного способа являются сложность его реализации и низкая чувствительность к измеряемой величине из-за использования косвенных методов измерения, заключающихся в том, что воздействие параметра вращения преобразуют в деформацию растяжения-сжатия чувствительных элементов и о параметре вращения судят по величине электрического сопротивления деформируемых чувствительных элементов.
Кроме того, этот способ не позволяет измерять скорость внедрения и извлечения исполнительных органов горных и строительных машин при их взаимодействии с разрабатываемым массивом горных пород, способ является контактным, т.е. реализуют его при условии обязательного взаимодействия исследуемых объектов с измерительной аппаратурой, что ограничивает количество полученных параметров внедрения, требует привлечения дополнительных измерительных устройств и обеспечения их непосредственного контакта с исполнительными органами внедрения горных и строительных машин в разрабатываемый массив геосреды и ведет к удорожанию стоимости исследования процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды, что снижает эффективность способа.
Наиболее близким по технической сущности и совокупности существенных признаков является способ исследования параметров машин ударного действия, реализованный в стенде для экспериментальных исследований параметров ударной машины (патент РФ №127472 на полезную модель, кл. G01P 3/00, опубл. в Бюл. №12, 2013 г.), включающий исследование параметров ударной машины, которую закрепляют на станине, осуществляют контроль и регистрацию перемещения ударника, при этом станину снабжают меткой перемещения ударника, штангой с блоком. Между ударником и меткой его перемещения осуществляют механическую связь через упомянутый блок штанги. Контроль и регистрацию перемещения ударника производят посредством цифровой видеокамеры.
Общими признаками прототипа и предлагаемого способа являются: регистрация перемещений исполнительных органов горных и строительных машин цифровой видеокамерой, использование метки перемещения с последующим определением скорости перемещения ударника в любой точке их движения, регистрация частоты ударных воздействий с помощью аудио регистрирующего устройства указанной цифровой видеокамеры.
Недостатком этого способа является необходимость контактного взаимодействия изучаемого объекта с приспособлениями стенда, а именно со станиной для закрепления ударной машины, с меткой перемещения исполнительного органа в конструкции ударного механизма машины в виде ударника, со штангой с блоком и механической связью метки перемещения с ударником, что не дает возможности исследования изучаемого объекта в натурных, производственных условиях, значительно снижая эффективность способа исследования. Кроме того, контактное взаимодействие изучаемого объекта с приспособлениями стенда не обеспечивает безопасность оператора, что снижает надежность способа исследования.
Недостатком данного способа является также возможность исследования поступательного перемещения исполнительных органов внутри корпуса стенда (машины), находящегося в статическом состоянии, что также не позволяет проводить исследования в натурных, производственных условиях. По этой причине с помощью данного способа невозможно определение и прогнозирование динамических параметров исполнительных органов горных и строительных машин, а также определение механической, объемной, рейсовой скоростей и параметров вращения исполнительных органов горных и строительных машин в процессе их взаимодействия с разрабатываемым массивом геосреды, что значительно снижает эффективность способа исследования.
Наличие вспомогательных устройств и приспособлений в прототипе, а также механических связей между ними и объектом исследования приводит к увеличению стоимости проводимых исследований.
Проблема заключается в повышении эффективности способа исследования процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды за счет возможности дистанционного перманентного мониторинга динамических параметров этих органов в период всего рабочего цикла с последующей обработкой полученных данных для оценки энергетических, технико-экономических и ресурсных показателей горных и строительных машин, в повышении надежности исследования за счет упрощения всего комплекта измерительной аппаратуры при снижении стоимости проводимых исследований и в повышении безопасности работ за счет исключения контакта оператора с движущимися деталями горных и строительных машин.
Проблема решается тем, что в способе исследования процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды, включающем регистрацию их перемещений цифровой видеокамерой с использованием метки перемещения и последующим определением по ним скорости перемещения в любой точке их движения и регистрацию частоты ударных воздействий с помощью аудио регистрирующего устройства указанной цифровой видеокамеры, согласно техническому решению регистрируют вертикальные и горизонтальные перемещения указанных исполнительных органов, используя по меньшей мере одну неподвижную метку вертикального и горизонтального перемещений, а после регистрации вертикальных и горизонтальных перемещений указанных исполнительных органов видеофайл записи переносят в электронный блок обработки данных, где при помощи программы mySize или ее аналогов в видеофайл записи устанавливают неподвижно по меньшей мере одну измерительную шкалу с заданными интервалами делений, располагая ее вдоль оси перемещения указанных исполнительных органов. После этого с помощью вышеупомянутой программы mySize или ее аналогов с экрана электронного блока обработки данных в отображаемом видеофайле записи производят измерения линейных размеров элементов указанной неподвижной метки, затем определяют масштабный коэффициент kм как соотношение натурных линейных размеров Lo этой неподвижной метки и линейных размеров Lок ее изображения с экрана электронного блока обработки данных, после чего по видеофайлу записи с помощью указанной неподвижной метки определяют по упомянутой измерительной шкале ресурсные показатели - путь Lp проходки и время основной tосн и вспомогательной tвс работы указанных исполнительных органов в процессе их воздействия на разрабатываемый массив геосреды. Затем полученные данные переносят в расчетно-аналитический модуль электронного блока обработки данных и определяют с его помощью, с учетом полученного масштабного коэффициента kм, натурные показатели механической Vм, рейсовой Vp и объемной Vоб скоростей перемещения указанных исполнительных органов в процессе их воздействия на разрабатываемый массив геосреды, а также с помощью программы МВ-Ruler или ее аналогов электронного блока обработки данных по видеофайлу записи определяют угол α внедрения указанных исполнительных органов в разрабатываемый массив геосреды и частоту fвр их вращения за время перемещения указанной неподвижной метки относительно оси вращения упомянутых исполнительных органов, при этом частоту fуд ударных воздействий после ее регистрации аудио регистрирующим устройством указанной цифровой видеокамеры определяют по видеофайлу записи при помощи аудио программы обработки акустических сигналов указанного электронного блока обработки данных. Затем результаты определения частоты fуд ударных воздействий и частоты fвр вращения указанных исполнительных органов переносят в расчетно-аналитический модуль электронного блока обработки данных и по ним определяют с его помощью угол γ поворота указанных исполнительных органов между ударными нагрузками. После этого, используя нормативные количественные показатели стоимости энергопотребления и технического обслуживания, а также эксплуатационной стоимости указанных исполнительных органов с учетом определенных ранее ресурсных показателей, в указанном расчетно-аналитическом модуле производят расчет себестоимости С затрат на проходку одного погонного метра разрабатываемого массива геосреды, для любого интервала пройденного пути, при воздействии указанных исполнительных органов на разрабатываемый массив геосреды, по результатам которого в упомянутом расчетно-аналитическом модуле производят анализ технико-экономической эффективности процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды.
Совокупность перечисленных признаков предлагаемого технического решения обеспечивает повышение эффективности способа исследования процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды, поскольку комплексный подход к исследованию дает возможность дистанционного перманентного мониторинга динамических параметров этих органов в процессе их работы и получать такие важные ресурсные показатели процесса воздействия как путь Lp проходки, время основной tосн и время вспомогательной tвс работы исполнительных органов на конкретных участках перемещения при внедрении их в разрабатываемый массив геосреды и извлечении из него, позволяет рассчитать с помощью аналитического модуля электронного блока обработки данных технико-экономические характеристики горного и строительного производства: Vм - механическую скорость проходки исполнительного органа, Vp - рейсовую скорость проходки исполнительного органа, Vоб - объемную скорость проходки исполнительного органа, число n его оборотов. Кроме того, предлагаемый способ позволяет с помощью программы MB-Ruler или ее аналогов электронного блока обработки данных по видеофайлу записи определять угол α внедрения указанных органов в упомянутый массив и частоту fвр их вращения за время перемещения указанной неподвижной метки относительно оси вращения упомянутых исполнительных органов в процессе их внедрения в разрабатываемый массив геосреды. По результатам частоты fуд ударных воздействий и частоты fвр вращения указанных исполнительных органов, перенесенных в расчетно-аналитический модуль электронного блока обработки данных, определяют с его помощью угол γ поворота указанных исполнительных органов между ударными нагрузками. Повышение надежности способа достигается бесконтактным прямым исследованием процесса воздействия исполнительных органов, что обеспечивает безопасность для оператора. Отсутствие вспомогательных устройств и приспособлений, как в прототипе (станины для закрепления ударной машины с блоком на штанге для осуществления механической связи между ударником и меткой, блока и т.д.), а также механических связей между ними и объектом исследования упрощает реализацию способа и снижает его себестоимость С. Предлагаемый способ позволяет также производить расчет себестоимости С работы конкретных горных и строительных машин, а также проанализировать их технико-экономическую эффективность.
Целесообразно, чтобы цифровая видеокамера перед исследованием процесса воздействия указанных исполнительных органов была установлена неподвижно. Это позволяет достоверно фиксировать перемещения исполнительных органов горных и строительных машин в процессе их работы, исключая искажения получаемых во время видеосъемки параметров перемещения и вращения исполнительных органов, что повышает точность измерений и, как следствие, эффективность способа исследований процесса взаимодействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды.
Целесообразно в качестве указанной по меньшей мере одной неподвижной метки использовать метку в виде перекрещивающихся горизонтальной и вертикальной линий. Метка такой формы (например, Т-образная, Г-образная, в виде +) позволяет одновременно определять параметры и вертикального, и горизонтального перемещений исполнительных органов горных и строительных машин в разрабатываемый массив геосреды, повышая эффективность способа исследования.
Целесообразно также в качестве указанной по меньшей мере одной неподвижной метки использовать элементы конструкции горных и строительных машин. Это позволит оператору вообще не контактировать с исполнительными органами, особенно при исследованиях в труднодоступных и опасных участках разрабатываемого массива геосреды, что повышает безопасность его работы.
Целесообразно также в качестве указанной по меньшей мере одной измерительной шкалы использовать измерительный фото-субтитр, встроенный в видеофайл записи цифровой видеокамеры с помощью программы монтажа электронного блока обработки данных. Тогда фиксация поступательного и вращательного движений исполнительного органа по горизонтальной и вертикальной оси относительно встроенного в запись цифровой видеокамеры измерительного фото-субтитра с постоянными размерами в режиме просмотра видеофайла записи рейса в течение оперативного времени Топ воздействия исполнительного органа на разрабатываемый массив геосреды (интервал времени от его внедрения до извлечения) позволяет без использования дополнительных приспособлений, например, измерительной линейки, рулетки и т.п., путем взаимодействия неподвижной метки с фото-субтитром определять механическую Vм, рейсовую Vp, объемную Vоб скорости перемещений указанного исполнительного органа на постоянных интервалах его перемещения при внедрении в разрабатываемый массив геосреды или извлечении из него, и в дальнейшем рассчитать технико-экономические характеристики горного и строительного производства, что повышает эффективность способа исследований и упрощает весь комплект измерительной аппаратуры.
Целесообразно также в качестве указанной по меньшей мере одной измерительной шкалы использовать измерительную программу электронного блока обработки данных в виде электронной экранной линейки, позволяющей рассчитать технико-экономические характеристики горного и строительного производства без применения измерительного фото-субтитра, что сокращает время обработки данных, упрощает работу с видеофайлами записи рейса, повышая эффективность и надежность способа исследования.
Целесообразно, чтобы при наличии приборов учета показателей воздействия указанных исполнительных органов на разрабатываемый массив геосреды (например, манометра) при проведении исследований указанные показатели с этих приборов учета регистрировались с помощью по меньшей мере одной дополнительной цифровой видеокамеры. Это позволит комплексно оценить характеристики и показатели процесса воздействия (расход воздуха, расход электроэнергии, частоту fвр вращения и т.д.) исполнительных органов горных и строительных машин на разрабатываемый массив геосреды, что повышает эффективность способа исследования.
Целесообразно, чтобы перед исследованием указанная по меньшей мере одна дополнительная цифровая видеокамера была установлена неподвижно. Это позволяет достоверно фиксировать показания приборов учета горных и строительных машин, а следовательно, повышает эффективность способа исследования.
Целесообразно в начале регистрации измеряемых параметров синхронизировать записи указанных цифровой видеокамеры и по меньшей мере одной дополнительной цифровой видеокамеры с помощью произвольного акустического воздействия на воздушную среду, что позволяет при одновременной работе указанных цифровых видеокамер более точно исследовать параметры внедрения исполнительных органов горных и строительных машин на разрабатываемый массив геосреды и тем самым повысить эффективность способа исследования.
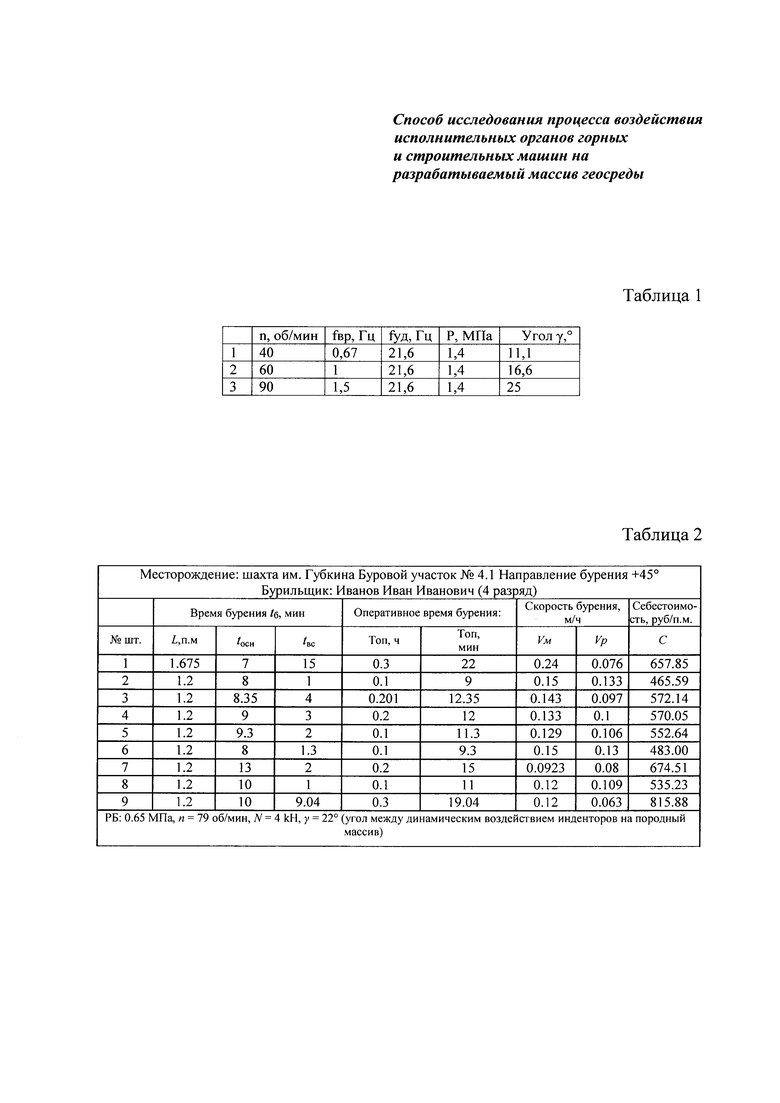
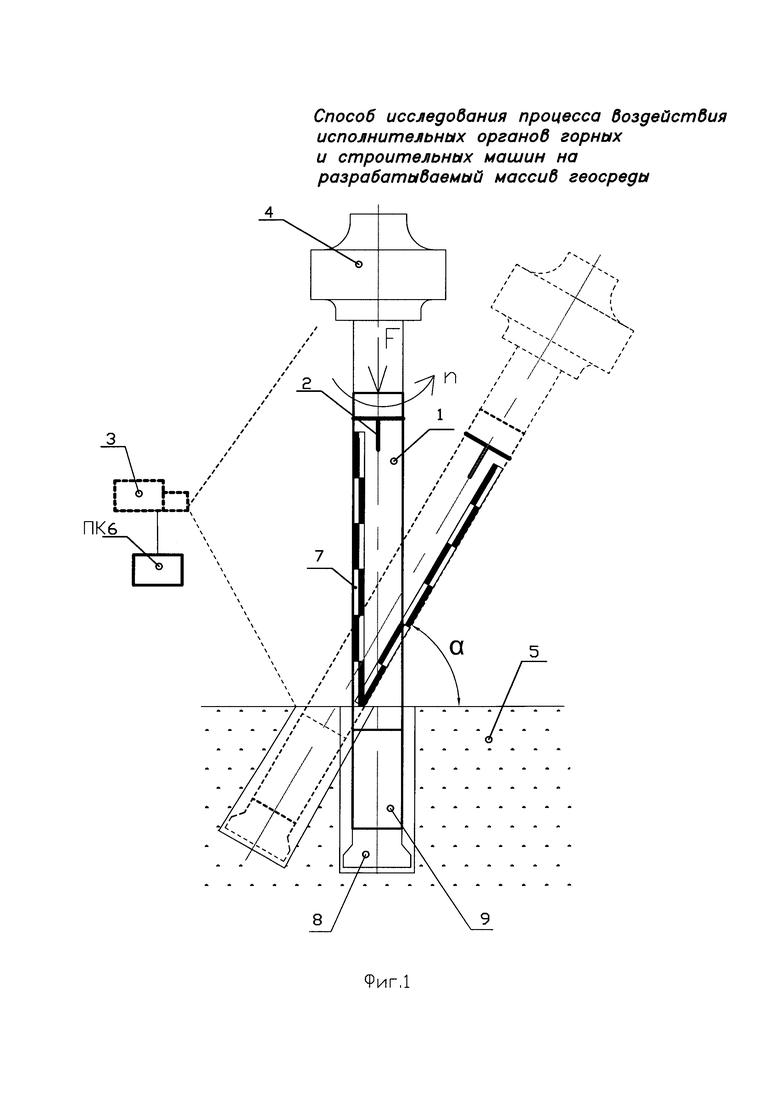
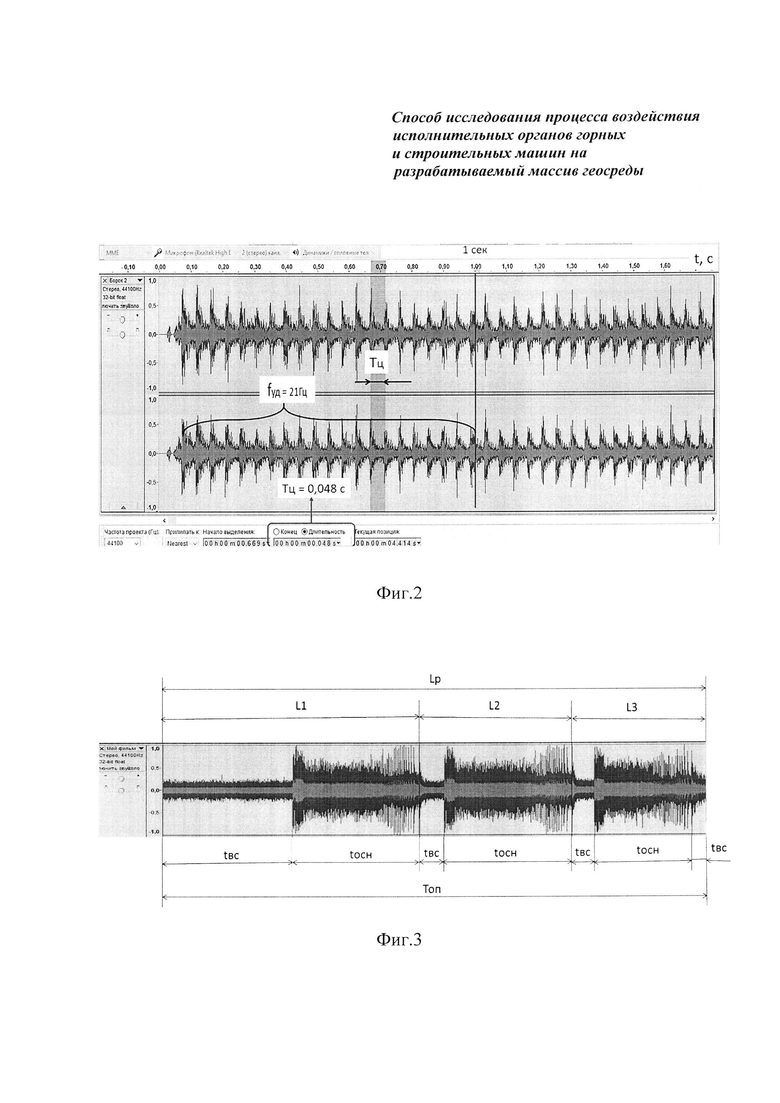
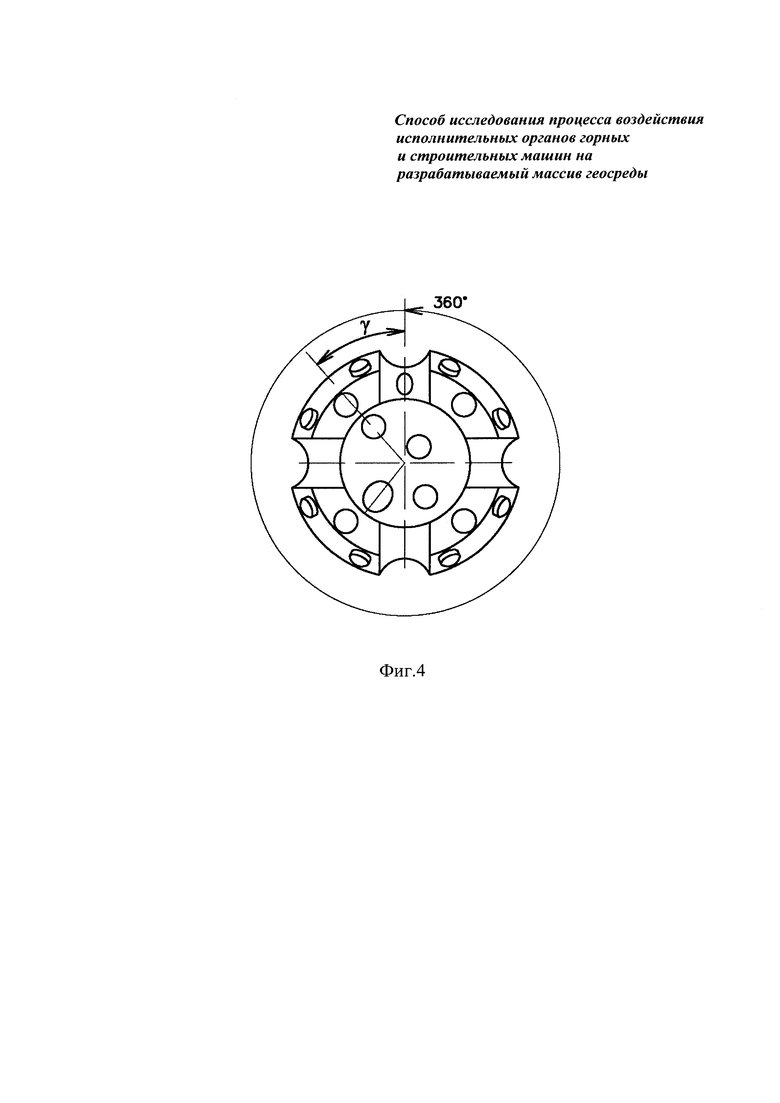
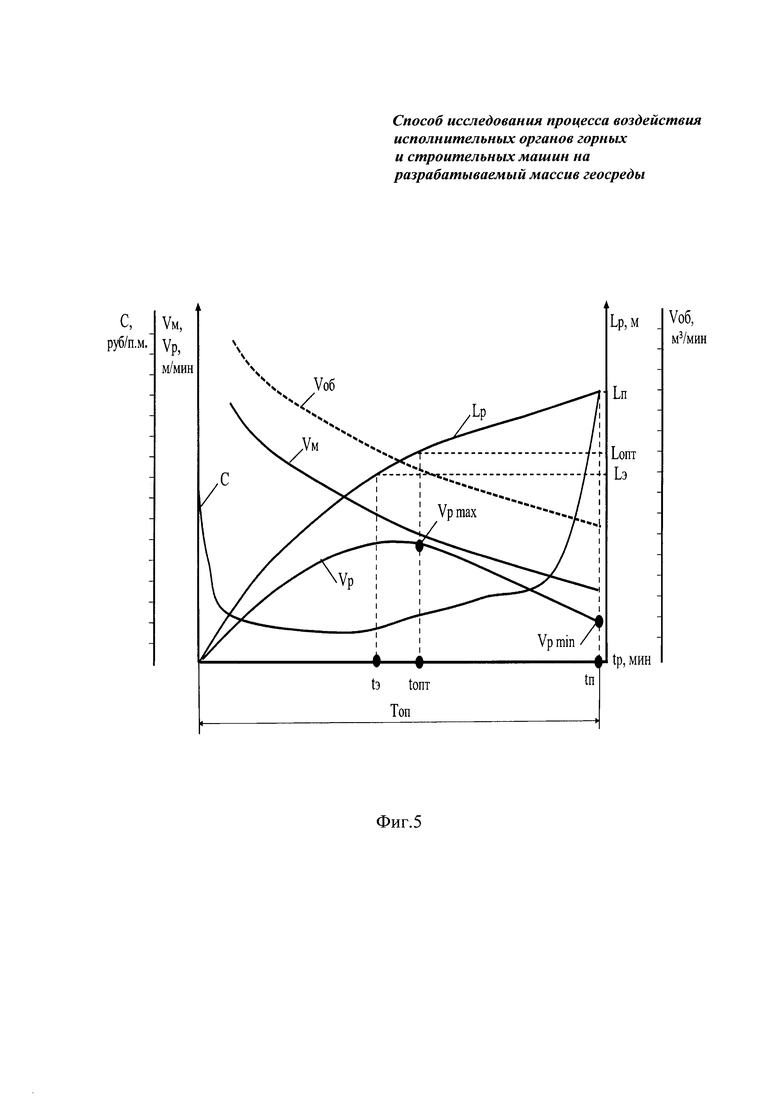
Сущность технического решения поясняется примером реализации способа исследования процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды (далее - способ), чертежами фиг. 1-5 и таблицами 1, 2, где на фиг. 1 приведена схема реализации предлагаемого способа, на фиг. 2 - график определения частоты fуд ударных воздействий исполнительных органов горных и строительных машин на разрабатываемый массив геосреды, на фиг. 3 - график определения времени основной tосн и времени вспомогательной tвс работы в течение оперативного времени Топ на контрольных участках L1, L2, L3 с постоянными размерами перемещения исполнительного органа при пути LP проходки, на фиг. 4 - угол γ поворота исполнительного органа (буровой коронки) между ударными нагрузками, на фиг. 5 - график технико-экономической эффективности горных и строительных машин при проходке пути в течение оперативного времени Топ перемещения исполнительного органа, в таблице 1 - результаты расчета угла γ поворота исполнительного органа между ударными нагрузками, в таблице 2 - технико-экономические показатели бурения исполнительного органа.
Предлагаемый способ был опробирован на нескольких объектах горного и строительного производства в РФ. В данной заявке авторы представляют результаты реализации способа, например, бурения скважин, на шахте им. Губкина (Белгородская область), поскольку там были проведены исследования в объеме, который наиболее полно отражают суть заявляемого способа.
Способ реализуют следующим образом.
На корпусе 1 исполнительного органа горной или строительной машины для регистрации его вертикального и горизонтального перемещений наносят по меньшей мере одну неподвижную метку 2 вертикального и горизонтального перемещений в виде перекрещивающихся горизонтальной и вертикальной линий, например, Т-образной формы (фиг. 1). В качестве неподвижной метки 2 можно использовать также элементы конструкции горных и строительных машин (на фиг. 1 не показано). Устанавливают неподвижно цифровую видеокамеру 3 (далее - камера 3) или цифровой фотоаппарат с режимом видеосъемки. Включают силовую установку 4. Под действием силы F и крутящего момента от силовой установки 4, создающего n оборотов исполнительного органа, последний начинает внедрение в разрабатываемый массив 5 геосреды. Одновременно включают камеру 3 для регистрации вертикального или горизонтального перемещений исполнительного органа. После их регистрации полученный с камеры 3 видеофайл записи процесса воздействия исполнительного органа на разрабатываемый массив 5 геосреды за пройденный путь горной или строительной машины, включающий время основной tосн и время вспомогательной tвс работы исполнительного органа, переносят в электронный блок обработки данных, например, персональный компьютер ПК 6. В полученный видеофайл записи процесса воздействия исполнительного органа с помощью программы mySize или ее аналогов устанавливают неподвижно по меньшей мере одну измерительную шкалу 7 с заданными интервалами делений, например, используют измерительную программу ПК 6 в виде электронной экранной линейки, располагая ее, например, вдоль оси вертикального перемещения исполнительного органа (фиг. 1) на протяжении всей записи снимаемого материала. В качестве указанной по меньшей мере одной измерительной шкалы 7 может быть использован измерительный фото-субтитр, встроенный в видеофайл записи камеры 3 при помощи программы монтажа ПК 6, например, Pinnacle Studio или ее аналогов. После чего с помощью программы mySize или ее аналогов с экрана ПК 6 в отображаемом видеофайле записи производят измерения линейных размеров элементов указанной неподвижной метки 2, затем определяют масштабный коэффициент kм как соотношение натурных линейных размеров Lo неподвижной метки 2 и линейных размеров Lок изображения неподвижной метки 2 с экрана ПК 6:
kм=Lo/Lок.
После этого по видеофайлу записи с помощью указанной неподвижной метки 2 определяют по измерительной шкале 7 (фиг. 3) ресурсные показатели - путь Lp проходки, время основной tосн и время вспомогательной tвс работы указанных исполнительных органов в процессе их воздействия на разрабатываемый массив геосреды. Затем полученные данные переносят в расчетно-аналитический модуль ПК 6 и с его помощью и с учетом полученного масштабного коэффициента kм определяют натурные показатели механической Vм, рейсовой Vp и объемной Vоб скоростей перемещения (например, бурения) исполнительного органа в процессе его воздействия на разрабатываемый массив геосреды. Также с помощью программы ПК 6 - MB-Ruler или ее аналогов по видеофайлу записи определяют угол α внедрения (фиг. 1) указанного исполнительного органа в разрабатываемый массив геосреды и частоту fвр его вращения за время перемещения неподвижной метки 2 относительно оси вращения исполнительного органа. Частоту fуд ударных воздействий после ее регистрации аудио регистрирующим устройством указанной камеры 3 определяют по видеофайлу записи при помощи аудио программы обработки акустических сигналов, например, Audacity ПК 6 или ее аналогов, зная время Тц одного ударного цикла (фиг. 2). Затем результаты определения частоты fуд ударных воздействий (фиг. 2) и частоты fвр вращения указанного исполнительного органа переносят в расчетно-аналитический модуль ПК 6 и по ним с его помощью определяют угол γ поворота исполнительного органа между ударными нагрузками по формуле:
γ=fвр×360°/fуд.
На фиг. 4 показан угол γ поворота исполнительного органа между ударными нагрузками инструмента 8 (буровой коронки) ударной машины 9 на разрабатываемый массив геосреды. Результаты расчета упомянутого угла γ при давлении Р энергоносителя по прибору учета приведены в табл. 2.
Используя нормативные количественные показатели стоимости энергопотребления и технического обслуживания, а также эксплуатационной стоимости указанного исполнительного органа, с учетом определенных ранее ресурсных показателей, в расчетно-аналитическом модуле ПК 6 производят расчет себестоимости С затрат на проходку одного погонного метра разрабатываемого массива геосреды, для любого интервала пройденного пути, при воздействии указанных исполнительных органов на разрабатываемый массив геосреды, затем выполняют построение графика (фиг. 5) технико-экономической эффективности процесса воздействия исполнительных органов горных и строительных машин при проходке пути в течение оперативного времени Топ проходки при рассчитанной (табл. 1) и построенной в виде графика (фиг. 5) себестоимости. На графике технико-экономической эффективности процесса воздействия исполнительных органов горных и строительных машин при проходке пути в течение оперативного времени Топ проходки показаны изменения: механической - Vм, рейсовой - Vp, объемной - Vоб скоростей внедрения; Lp - пути проходки исполнительного органа за время tp; себестоимости С проходки одного погонного метра при установленном режиме воздействия исполнительного органа в разрабатываемый массив геосреды за оперативное время Топ проходки; tэ - экономически выгодной продолжительности внедрения в разрабатываемый массив геосреды исполнительного органа при tp=tэ, где Lp=Lэ, Lэ - экономически выгодный путь внедрения исполнительного органа в разрабатываемый массив геосреды; tопт - оптимальная продолжительность внедрения в разрабатываемый массив геосреды исполнительного органа при tp=tопт, где Lp=Lопт, Lопт - оптимальный путь внедрения исполнительного органа в разрабатываемый массив геосреды; tд - продолжительности внедрения в разрабатываемый массив геосреды исполнительного органа до наработки на отказ (разрушения) или до требуемой глубины воздействия tp=tд, где Lр=Lп, Lп - путь проходки исполнительного органа в разрабатываемый массив геосреды исполнительного органа до наработки на отказ (разрушения) или до требуемой глубины воздействия. По результатам расчета себестоимости С способа производят анализ графика (фиг. 5) технико-экономической эффективности горных и строительных машин при прохождении рейса в течение оперативного времени Топ проходки, определяют наиболее эффективные исполнительные органы горных и строительных машин с учетом себестоимости С проходки одного погонного метра.
При наличии приборов учета показателей воздействия исполнительного органа на разрабатываемый массив геосреды (давления, усилия подачи, частоты вращения, расхода электроэнергии, воды, сжатого воздуха) эти показатели регистрируют по меньшей мере одной дополнительной цифровой видеокамерой (на фиг. 1 не показана) и в начале регистрации измеряемых параметров производят синхронизацию записи указанных камеры 3 и по меньшей мере одной дополнительной цифровой видеокамеры с помощью произвольного акустического воздействия на воздушную среду, при этом указанную по меньшей мере одну дополнительную цифровую видеокамеру устанавливают неподвижно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический способ исследования процесса воздействия исполнительных органов горных и строительных машин с ударным принципом погружения на разрабатываемый массив геосреды | 2018 |
|
RU2674350C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ МАШИНЫ С ГРАФИЧЕСКИМ ДИСПЛЕЕМ | 2010 |
|
RU2448036C1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2307934C1 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| Способ разработки забоя исполнительным органом горной машины и способ переналадки исполнительного органа горной машины | 1985 |
|
SU1502827A1 |
| УГОЛЬНЫЙ КОМБАЙН | 2007 |
|
RU2357080C1 |
| ДИНАМИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2723846C1 |
| СПОСОБ УПРАВЛЕНИЯ СООРУЖЕНИЕМ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОГО ОБЪЕКТА | 1991 |
|
RU2034969C1 |
| Динамический манипулятор | 2018 |
|
RU2691351C1 |
| ДИНАМИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2721506C1 |
Изобретение относится к горному делу и строительству, используется для дистанционной регистрации и измерения параметров исполнительных органов горных и строительных машин в процессе их воздействия на разрабатываемую геосреду, применяется в лабораторных и натурных исследованиях. Способ включает регистрацию вертикальных и горизонтальных перемещений исполнительных органов цифровой видеокамерой с использованием по меньшей мере одной неподвижной метки вертикального и горизонтального перемещений. Затем видеофайл записи переносят в электронный блок обработки данных (далее - блок), где при помощи программы mySize или ее аналогов в видеофайл записи устанавливают неподвижно по меньшей мере одну измерительную шкалу и с экрана блока в отображаемом видеофайле записи производят измерения линейных размеров элементов неподвижной метки, затем определяют масштабный коэффициент kм как соотношение натурных линейных размеров неподвижной метки и линейных размеров ее изображения с экрана блока. По видеофайлу записи с помощью неподвижной метки определяют ресурсные показатели исполнительных органов по упомянутой измерительной шкале. Полученные данные переносят в расчетно-аналитический модуль (далее - модуль) блока и определяют с его помощью, с учетом масштабного коэффициента kм, натурные показатели скоростей перемещения исполнительных органов. С помощью программы MB-Ruler или ее аналогов блока по видеофайлу записи определяют угол α внедрения исполнительных органов и частоту fвр их вращения за время перемещения неподвижной метки относительно оси вращения этих органов. Частоту fуд ударных воздействий после ее регистрации аудио регистрирующим устройством цифровой видеокамеры определяют по видеофайлу записи при помощи аудио программы обработки акустических сигналов указанного блока. Результаты определения fуд и fвр переносят в модуль блока и по ним определяют с его помощью угол γ поворота исполнительных органов между ударными нагрузками. Производят расчет себестоимости С затрат на проходку одного погонного метра разрабатываемого массива, по результатам которого в модуле блока производят анализ технико-экономической эффективности процесса воздействия исполнительных органов. Технический результат - возможность дистанционного перманентного мониторинга динамических параметров этих органов в период всего рабочего цикла с последующей обработкой полученных данных для оценки показателей горных и строительных машин, упрощение комплекта измерительной аппаратуры при снижении стоимости проводимых исследований и повышении их безопасности. 8 з.п. ф-лы, 2 табл., 5 ил.
1. Способ исследования процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды, включающий регистрацию их перемещений цифровой видеокамерой с использованием метки перемещения и последующим определением по ним скорости перемещения в любой точке их движения и регистрацию частоты ударных воздействий с помощью аудио регистрирующего устройства указанной цифровой видеокамеры, отличающийся тем, что регистрируют вертикальные и горизонтальные перемещения указанных исполнительных органов, используя по меньшей мере одну неподвижную метку вертикального и горизонтального перемещений, а после регистрации вертикальных и горизонтальных перемещений указанных исполнительных органов видеофайл записи переносят в электронный блок обработки данных, где при помощи программы mySize или ее аналогов в видеофайл записи устанавливают неподвижно по меньшей мере одну измерительную шкалу с заданными интервалами делений, располагая ее вдоль оси перемещения указанных исполнительных органов, после чего с помощью вышеупомянутой программы mySize или ее аналогов с экрана электронного блока обработки данных в отображаемом видеофайле записи производят измерения линейных размеров элементов указанной неподвижной метки, затем определяют масштабный коэффициент kм как соотношение натурных линейных размеров Lo этой неподвижной метки и линейных размеров Lок ее изображения с экрана электронного блока обработки данных, после чего по видеофайлу записи с помощью указанной неподвижной метки определяют по упомянутой измерительной шкале ресурсные показатели - путь Lp проходки и время основной tосн и вспомогательной tвс работы указанных исполнительных органов в процессе их воздействия на разрабатываемый массив геосреды, затем полученные данные переносят в расчетно-аналитический модуль электронного блока обработки данных и определяют с его помощью, с учетом полученного масштабного коэффициента kм, натурные показатели механической Vм, рейсовой Vp и объемной Vоб скоростей перемещения указанных исполнительных органов в процессе их воздействия на разрабатываемый массив геосреды, а также с помощью программы МВ-Ruler или ее аналогов электронного блока обработки данных по видеофайлу записи определяют угол α внедрения указанных исполнительных органов в разрабатываемый массив геосреды и частоту fвр их вращения за время перемещения указанной неподвижной метки относительно оси вращения упомянутых исполнительных органов, при этом частоту fуд ударных воздействий после ее регистрации аудио регистрирующим устройством указанной цифровой видеокамеры определяют по видеофайлу записи при помощи аудио программы обработки акустических сигналов указанного электронного блока обработки данных, затем результаты определения частоты fуд ударных воздействий и частоты fвр вращения указанных исполнительных органов переносят в расчетно-аналитический модуль электронного блока обработки данных и по ним определяют с его помощью угол γ поворота указанных исполнительных органов между ударными нагрузками, после чего, используя нормативные количественные показатели стоимости энергопотребления и технического обслуживания, а также эксплуатационной стоимости указанных исполнительных органов с учетом определенных ранее ресурсных показателей, в расчетно-аналитическом модуле электронного блока обработки данных производят расчет себестоимости С затрат на проходку одного погонного метра разрабатываемого массива геосреды, для любого интервала пройденного пути, при воздействии указанных исполнительных органов на разрабатываемый массив геосреды, по результатам которого в расчетно-аналитическом модуле электронного блока обработки данных производят анализ технико-экономической эффективности процесса воздействия исполнительных органов горных и строительных машин на разрабатываемый массив геосреды.
2. Способ по п. 1, отличающийся тем, что цифровую видеокамеру перед исследованием процесса воздействия указанных исполнительных органов устанавливают неподвижно.
3. Способ по п. 1 или 2, отличающийся тем, что в качестве указанной по меньшей мере одной неподвижной метки используют метку в виде перекрещивающихся горизонтальной и вертикальной линий.
4. Способ по п. 1 или 2, отличающийся тем, что в качестве указанной по меньшей мере одной неподвижной метки используют элементы конструкции горных и строительных машин.
5. Способ по п. 1, отличающийся тем, что в качестве указанной по меньшей мере одной измерительной шкалы используют измерительный фото-субтитр, встроенный в видеофайл записи цифровой видеокамеры с помощью программы монтажа электронного блока обработки данных.
6. Способ по п. 1, отличающийся тем, что в качестве указанной по меньшей мере одной измерительной шкалы используют измерительную программу электронного блока обработки данных в виде электронной экранной линейки.
7. Способ по п. 1, отличающийся тем, что при наличии приборов учета показателей воздействия указанных исполнительных органов на разрабатываемый массив геосреды при проведении исследований указанные показатели с этих приборов учета регистрируют с помощью по меньшей мере одной дополнительной цифровой видеокамеры.
8. Способ по п. 7, отличающийся тем, что перед исследованием указанную по меньшей мере одну дополнительную цифровую видеокамеру устанавливают неподвижно.
9. Способ по п. 7 или 8, отличающийся тем, что в начале регистрации измеряемых параметров производят синхронизацию записи указанных цифровой видеокамеры и по меньшей мере одной дополнительной цифровой видеокамеры с помощью произвольного акустического воздействия на воздушную среду.
| Прибор для определения клейкости резиновых смесей | 1959 |
|
SU127472A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАБОЧЕГО ЦИКЛА ПНЕВМОПРОБОЙНИКА | 1994 |
|
RU2098568C1 |
| СПОСОБ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СКОРОСТИ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518018C2 |
| US 6992756 B1, 31.01.2006. | |||

