Настоящее изобретение относится к устройству для использования в сейсмической съемке.
Сейсмическая съемка, или сейсмическая разведка методом отраженных волн, используется для картирования подземных структур. Управляемый источник сейсмических сигналов генерирует низкочастотную сейсмическую волну, распространяющуюся сквозь земную толщу. На границах раздела между слоями пород с различающимися свойствами происходит частичное отражение этой сейсмической волны. Отраженные волны возвращаются на поверхность, где регистрируются одним или более сейсмических датчиков. Колебания грунта, зарегистрированные на земной поверхности, могут происходить в очень широком динамическом диапазоне, где частицы смещаются на расстояния, составляющие от сантиметров до ангстремов. Данные, зарегистрированные датчиками, анализируют для получения представления о структуре и составе подземных пластов.
Сейсмические датчики (также известные как сейсмометры или геофоны) обычно содержат электрическую проволочную катушку, помещенную в сильное магнитное поле. Конструкция этих электромагнитных датчиков может быть основана на движущемся магните либо на движущейся катушке, при этом датчики второго из этих типов обладают исключительными свойствами для применения в сейсмической разведке. В варианте с движущейся катушкой магнит крепится к корпусу, прочно вставляемому в грунт, так что корпус и магнит движутся синхронно со смещениями грунта. Движущаяся электрическая катушка помещается в магнитное поле, возникающее в зазоре между полюсами постоянного магнита, и без натяга соединяется с корпусом геофона посредством гибких пружин таким образом, что перемещение катушки возможно только вдоль одной оси. По мере движения катушки вдоль этой оси относительно неподвижного магнита она последовательно пересекает силовые линии магнитного поля, вследствие чего на электрических выводах катушки генерируются напряжение и ток, пропорциональные скорости смещения грунта.
В геофонах с движущейся катушкой, последняя образует ускоряемую или реактивную массу.
Эта конструкция, включающая катушку и пружины, имеет резонансную частоту, зависящую от массы катушки и податливости пружин. При частотах значительно ниже резонансной частоты катушка и магнит движутся синхронно, что обусловливает низкую чувствительность и слабый выходной сигнал напряжения или тока. При увеличении частоты колебаний до резонансного значения для геофона и выше характеристики чувствительности и выходного сигнала демонстрируют соответственный подъем до пикового значения и выход на плоский участок. Как правило, резонансная частота геофонов находится в диапазоне от 10 до 30 Гц, предпочтительно ближе к нижнему концу этого диапазона. Для достижения низкочастотного резонанса необходима высокая податливость пружин. Следовательно, для этого нужны мягкие пружины, что, в свою очередь, обусловливает настоятельную необходимость в проектировании и конструировании прецизионных датчиков для достижения требуемых при проведении сейсмической съемки уровней чувствительности, робастности, линейности и устойчивости к внеосевым помехам. Выбор оптимального соотношения между такими конструктивными параметрами как напряженность поля, размеры и вес магнита, геометрия катушки и податливость пружин имеет решающее значение для проектирования и конструирования геофона, который имел бы чувствительность, выходные сигналы напряжения и тока, линейность и робастность, достаточные для одновременного измерения как больших, так и малых поверхностных колебаний, описанных выше.
В геофонах еще одного типа, применяемого для сейсмической съемки, генерирование электрического сигнала осуществляется посредством электрической емкости. Такие геофоны обычно конструируют в виде микроэлектромеханических систем (МЭМС), в которых используется кремний, подвергнутый микромеханической обработке и содержащий металлическое покрытие, наносимое на обращенные друг к другу компоненты на каждой стороне небольшой и подпружиненной ускоряемой массы. Преимуществами таких МЭМС-датчиков являются малые размеры и вес по сравнению с геофонами с движущейся катушкой. Движение ускоряемой массы МЭМС-системы относительно внешних неподвижных пластин создает переменную емкость, которая может быть зарегистрирована в виде вибрационного сигнала, пропорционального ускорению смещения датчика. Пружины формируются из тонкослойного кремния, чем обеспечиваются малое линейное смещение и резонансные частоты выше 1 кГц. Малая площадь поверхности емкостного элемента, высокая резонансная частота и узкие пределы линейного перемещения подразумевают довольно низкую чувствительность по сравнению с геофонами с движущейся катушкой. С целью устранения этого недостатка в МЭМС-геофоне используют специальную электронику для обеспечения силовой обратной связи. Для этого требуются дополнительные электронные схемы, нуждающиеся в конструктивном пространстве и питании, что отчасти сводит на нет преимущества МЭМС-систем в размерах и весе сравнительно с геофонами с пассивной движущейся катушкой.
Под термином "ускоряемая (реактивная, сейсмическая) масса" (proof mass) специалисты в данной области обычно подразумевают массу в сейсмическом датчике, которая перемещается в результате движения грунта при проведении сейсмической съемки.
Ниже описывается сейсмический датчик, подходящий для использования при проведении сейсмической съемки.
Устройство и системы, предлагаемые в настоящем изобретении, представлены по меньшей мере в одном варианте осуществления и предназначены для поддержки или выполнения определенных функций с целью проведения сейсмической съемки.
Это достигается путем комбинирования отличительных признаков, представленных в каждом независимом пункте формулы изобретения. Соответственно, в зависимых пунктах формулы изобретения подробно представлены другие формы реализации различных вариантов осуществления изобретения.
Одним из объектов изобретения является устройство для сейсмической съемки, содержащее корпус, ускоряемую массу, по меньшей мере один датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно корпуса, электронную схему, соединенную с упомянутым по меньшей мере одним датчиком и выполненную с возможностью получения и обработки выходного сигнала этого датчика, и источник питания, выполненный с возможностью подачи электрической энергии в электронную схему и представляющий собой составную часть ускоряемой массы.
Известные устройства, используемые для сейсмической съемки, являются, как правило, дорогостоящими и имеют сравнительно большие размеры и вес.Размеры и вес этих устройств увеличивают продолжительность и объем работ, требуемых для выполнения съемки, поскольку эти устройства необходимо доставить к месту проведения последней. Геофон или МЭМС-датчик в таких устройствах позволяет преобразовывать смещение частиц грунта, вызванное распространением сейсмических воли, в пропорциональный сигнал напряжения и последовательно регистрировать его как функцию времени. Смещение частиц грунта вызывает синхронное движение закрепленного в грунте корпуса геофона или МЭМС-датчика с амплитудой сейсмической волны, распространяющейся в данной точке пространства. Из-за инерции катушка геофона или кремниевая ускоряемая масса МЭМС-датчика остаются в сравнительно статичном состоянии, вследствие чего корпус совершает движение относительно этих компонентов. Это относительное движение корпуса и катушки или ускоряемой массы преобразуется в пропорциональный сигнал напряжения, что позволяет выполнить регистрацию сейсмической волны. Для эффективной работы такого устройства оно должно обладать чувствительностью, позволяющей ему воспринимать с низким искажением самые незначительные движения грунта. Это обусловливает необходимость в сильном, тяжелом магните и дорогостоящей катушке в случае датчиков-геофонов или, в альтернативном варианте, в дорогостоящих компонентах, подвергнутых прецизионной микромеханической обработке, и энергоемких электронных схемах в случае МЭМС-датчиков.
Предлагаемое устройство для использования при проведении сейсмической съемки, в котором ускоряемая масса содержит источник питания, благодаря чему обеспечиваются максимальная чувствительность, линейность и робастность, может иметь меньшие размеры и вес по сравнению с известными устройствами, в которых датчик и источник питания выполнены раздельно. Это, в свою очередь, обеспечивает более эффективное проведение сейсмической съемки.
Источник питания может содержать батарею (аккумуляторный элемент). Датчик может содержать один или более пьезоэлектрических элементов, выполненных с возможностью обнаружения перемещения ускоряемой массы.
Другим объектом изобретения является устройство для сейсмической съемки, содержащее корпус, ускоряемую массу, расположенную в полости корпуса с возможностью перемещения, и два датчика, каждый из которых содержит плоский пьезоэлектрический элемент, причем эти пьезоэлектрические элементы расположены на противоположных сторонах ускоряемой массы и предназначены для обнаружения перемещения ускоряемой массы относительно корпуса, а корпус выполнен с возможностью ограничения упомянутого перемещения ускоряемой массы возвратно-поступательным движением в первом направлении между пьезоэлектрическими элементами.
В этом варианте осуществления устройство может также содержать электронную схему, соединенную с датчиками и выполненную с возможностью получения и обработки выходного сигнала этих датчиков, и источник питания, выполненный с возможностью подачи электрической энергии в электронную схему и представляющий собой составную часть ускоряемой массы. Источник питания может содержать аккумуляторный элемент.
В известных устройствах, применяемых при проведении сейсмической съемки, обычно используются сложные датчики, содержащие катушку, движущуюся в магнитном поле. Автор настоящей заявки обнаружил, что с помощью пьезоэлектрических элементов можно сконструировать более простое, более легкое и более экономичное устройство. Хотя пьезоэлектрические преобразователи давления широко используются при проведении морской съемки, применение пьезоэлектрических элементов в датчиках, используемых при проведении съемки на суше, не рассматривается специалистами в данной области как целесообразное, поскольку считается, что пьезоэлектрические элементы не обладают достаточной точностью. Тем не менее, ускоряемая масса, содержащая источник питания, обеспечивает благоприятные результаты в отношении затрат, размеров и веса, позволяя развернуть большее число таких устройств. Как показывает практика, увеличение числа устройств по сравнению с используемым в более ранние периоды и в настоящее время позволяет сохранить и повысить точность системы в целом несмотря на некоторое ее снижение у отдельных устройств.
Ниже описываются различные конструктивные элементы, которые можно использовать в сочетании с описанными выше объектами изобретения.
Один или более пьезоэлектрических элементов могут содержать жесткую керамику. Эта жесткая керамика может содержать цирконат-титанат свинца (ЦВС).
Датчик может содержать подложку, на которую опирается пьезоэлектрический элемент. Эта подложка может содержать бериллиево-медный сплав.
Один или более пьезоэлектрических элементов могут находиться в состоянии предварительного напряжения. Другими словами, пьезоэлектрический элемент установлен в устройстве таким образом, что он имеет вогнутую форму даже в отсутствие движения ускоряемой массы.
Электронная схема может быть выполнена по меньшей мере с возможностью усиления и/или представления в цифровой форме выходного сигнала датчика, то есть обработки этого сигнала.
Ускоряемая масса может быть соединена с корпусом с возможностью перемещения, а устройство может быть выполнено с возможностью ограничения этого перемещения ускоряемой массы возвратно-поступательным движением относительно корпуса в первом направлении. По меньшей мере один датчик может быть выполнен с возможностью обнаружения этого возвратно-поступательного движения ускоряемой массы в первом направлении, то есть обнаружения перемещения ускоряемой массы относительно корпуса.
Это ограничение перемещения ускоряемой массы может представлять собой ограничение движения по направлению к пьезоэлектрическим элементам и от них. Соответственно, возвратно-поступательное движение ускоряемой массы между пьезоэлектрическими элементами может, в основном, происходить перпендикулярно плоскости этих пьезоэлектрических элементов.
Пьезоэлектрические элементы расположены таким образом, что их плоскости являются в целом параллельными.
Благодаря ограничению перемещения ускоряемой массы возвратно-поступательным движением относительно корпуса в первом направлении, устройство обладает возможностью селективного обнаружения смещения частиц в направлении какой-либо координатной оси. Например, три пьезоэлектрических датчика можно расположить таким образом, что их оси чувствительности будут взаимно ортогональными, совпадая с осями X, Y и Z прямоугольной системы координат. В этой конфигурации каждый отдельный датчик является нечувствительным ("слепым") в отношении движения, направление которого не совпадает с его собственной осью чувствительности. Такая конструкция позволяет использовать три датчика для полного охвата составляющих пространственного вектора, относящегося к полю распространения упругих волн.
Ускоряемая масса может быть размещена в полости корпуса с возможностью перемещения. Ускоряемая масса может содержать продолговатый элемент, имеющий продольную ось, корпус может содержать продолговатый стакан, имеющий продольную ось, а продольная ось продолговатого элемента может совпадать с продольной осью продолговатого стакана.
Первое направление может совпадать с совпадающими продольными осями продолговатого элемента и продолговатого стакана. По меньшей мере часть поперечного сечения продолговатого стакана, перпендикулярного его продольной оси, может соответствовать по меньшей мере части поперечного сечения продолговатого элемента, перпендикулярного его продольной оси, вследствие чего перемещение ускоряемой массы ограничивается возвратно-поступательным движением относительно корпуса в первом направлении.
Для обеспечения эффективного размещения внутри корпуса ускоряемой массы, составной частью которой является источник питания, эта масса может содержать продолговатый элемент, перемещающийся внутрь стакана. Продолговатый элемент может иметь, например, форму цилиндрического аккумуляторного элемента, включающего или не включающего концевые детали или защитный корпус. Стакан может быть выполнен таким образом, что его диаметр позволяет разместить аккумуляторный элемент и, в других вариантах осуществления, концевые детали или защитный корпус. Следовательно, путем минимального использования дополнительного материала можно ограничить перемещение ускоряемой массы (что способствует эффективной работе), одновременно с этим обеспечив наличие источника питания (аккумуляторного элемента), предусмотренного как составная часть этой ускоряемой массы.
На каждом конце стакана может быть предусмотрена крышка в сборе, выполненная с возможностью удержания продолговатого элемента внутри стакана. По меньшей мере одна из крышек в сборе может содержать по меньшей мере один датчик.
Аккумуляторный элемент, вывод аккумуляторного элемента, торцевая крышка или распорный элемент могут быть застопорены, приклеены или иным способом механически прикреплены к датчику, например к подложке или керамике последнего, путем приклеивания, сварки, пайки, с помощью винта или иного подходящего механического крепежного элемента таким образом, чтобы ускоряемая масса имела возможность попеременно напрягать, толкать или тянуть пьезоэлектрический элемент и подложку в прямом и обратном направлениях для генерирования электрических сигналов напряжения или тока как положительной, так и отрицательной полярности.
Узлы крышек (крышки в сборе) могут содержать вогнутые поверхности, контактирующие с продолговатым элементом. Эти вогнутые поверхности могут быть выполнены с возможностью совместного приложения к продолговатому элементу прижимного усилия, благодаря чему перемещение продолговатого элемента относительно корпуса ограничивается возвратно-поступательным движением в первом направлении. Продолговатый элемент может содержать регулируемые детали, выполненные с возможностью изменения длины продолговатого элемента вдоль продольной оси. Могут быть установлены крышки в сборе, позволяющие изменять расстояние между их вогнутыми поверхностями.
Стакан может быть снабжен крышками для удержания внутри него продолговатого элемента, образующего ускоряемую массу. Кроме того, крышки в сборе могут быть выполнены с возможностью прижима продолговатого элемента, чтобы последний не мог перемещаться внутри стакана в поперечном направлении (то есть в направлении боковых стенок стакана перпендикулярно продольной оси продолговатого элемента). Тем самым обеспечивается ограничение перемещения продолговатого элемента. Кроме того, продолговатый элемент, стакан и/или крышки в сборе могут быть выполнены с возможностью их регулирования с целью обеспечения контакта поверхностей или их механической фиксации на продолговатом элементе.
Каждая крышка в сборе может содержать уплощенный (сплющенный) элемент, расположенный таким образом, что он контактирует своей первой поверхностью с продолговатым элементом, и стопорный элемент, расположенный таким образом, что он прикладывает прижимное усилие по периметру второй поверхности уплощенного элемента, обращенной к первой поверхности. В некоторых вариантах осуществления настоящего изобретения стопорный элемент может быть выполнен как составная часть крышки в сборе.
Вогнутость первой поверхности может быть вызвана изгибанием уплощенного элемента вследствие приложения прижимного усилия и противоположно направленного усилия, обусловленного контактом продолговатого элемента с первой поверхностью.
В некоторых вариантах осуществления настоящего изобретения устройство может иметь такую конструкцию, что на уплощенный элемент оказывается воздействие в направлении продолговатого элемента путем приложения прижимного усилия по его периметру. Это может привести к изгибанию уплощенного элемента и приобретению его поверхностью вогнутой формы. Таким способом обеспечивается эффективное удержание продолговатого элемента на месте и вместе с тем обеспечивается возможность его перемещения.
По меньшей мере один из уплощенных элементов может содержать по меньшей мере один датчик. По меньшей мере один из уплощенных элементов может содержать по меньшей мере один пьезоэлектрический элемент. Вогнутость уплощенного элемента может быть причиной предварительного напряжения пьезоэлектрического элемента.
Источник питания может определять по меньшей мере 75% ускоряемой массы по весу и/или объему.
Корпус может быть выполнен из материала, плотность которого сравнима с плотностью грунта, в котором предполагается его использование.
В одном из вариантов осуществления устройства в корпусе предусмотрен выступ для вхождения в зацепление с ускоряемой массой с целью ограничения перемещения последней. Тем самым предотвращается столкновение ускоряемой массы с пьезоэлектрическим элементом (например, в случае падения устройства), могущее привести к повреждению этого элемента.
Согласно еще одному примеру осуществления настоящего изобретения, предлагается устройство для использования при проведении сейсмической съемки, содержащее корпус, ускоряемую массу, по меньшей мере один датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно корпуса, электронную схему, соединенную с упомянутым по меньшей мере одним датчиком и выполненную с возможностью получения и обработки выходного сигнала этого датчика, и источник питания, выполненный с возможностью подачи электрической энергии в электронную схему и представляющий собой составную часть ускоряемой массы.
Прочие отличительные признаки и преимущества настоящего изобретения станут ясны из приведенного ниже описания предпочтительных вариантов его осуществления, представленных лишь в качестве примера и со ссылками на приложенные чертежи.
Описанные ниже системы, устройства и способы, представляющие собой варианты осуществления настоящего изобретения, приведены лишь в качестве примера и со ссылками на приложенные чертежи, на которых показано:
фиг. 1 - сейсмочувствительная система,
фиг. 2 - общий вид устройства, предназначенного для использования при проведении сейсмической съемки и соответствующего одному из вариантов осуществления настоящего изобретения,
фиг. 3 - вид этого же устройства в разрезе,
фиг. 4 - детальное изображение одного конца устройства, показанного в разрезе на фиг. 3,
фиг. 5 - вид в поперечном разрезе устройства, предназначенного для использования при проведении сейсмической съемки и соответствующего другому варианту осуществления настоящего изобретения,
фиг. 6 - трехмерное изображение с пространственным разделением деталей устройства, показанного на фиг. 5.
Некоторые части и компоненты устройства, соответствующего настоящему изобретению, показаны более чем на одном чертеже; для ясности одинаковым элементам присвоены одинаковые численные ссылочные обозначения.
Краткое описание сейсмочувствительной системы дается ниже со ссылками на фиг. 1, после чего приводится описание сейсмического датчика со ссылками на фиг. 2, 3 и 4.
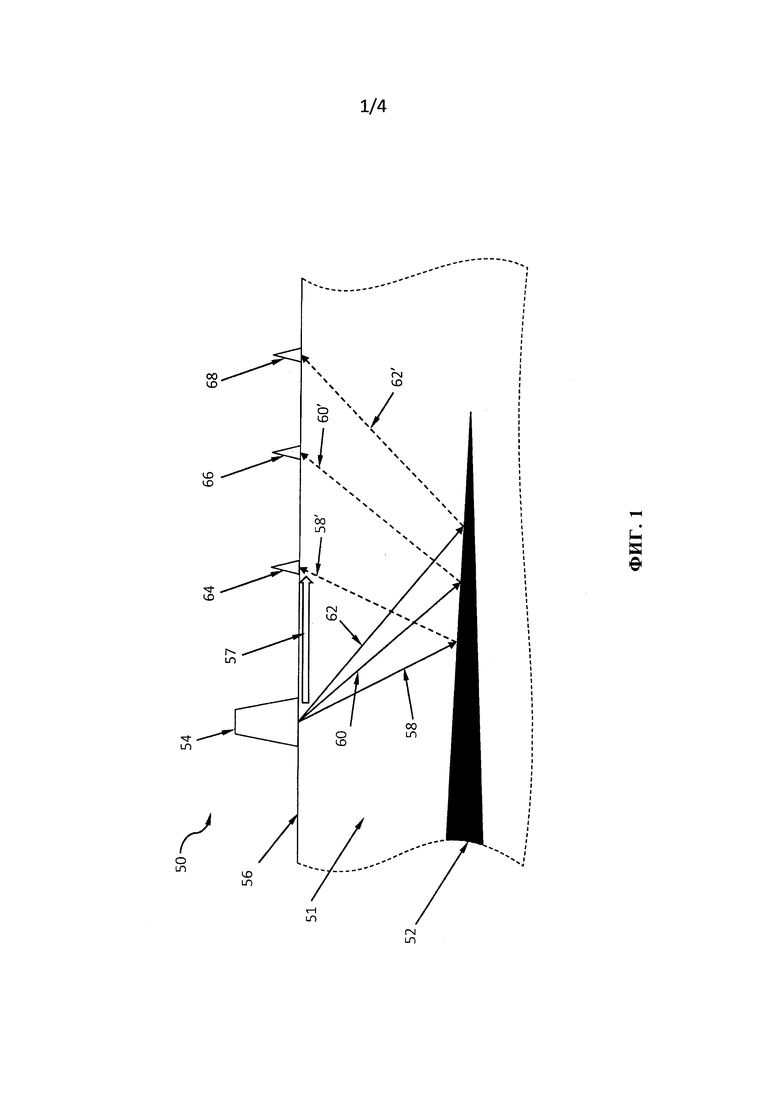
На фиг. 1 упрощенно показана система 50 для сейсмической съемки, выполняющая исследование земной толщи 51. В иллюстративных целях предполагается, что земная толща 51 имеет сравнительно однородную структуру за исключением слоя 52. Этот слой может представлять собой, например, породу, отличающуюся от остальных пород земной толщи 51, и, следовательно, характеризующуюся, например, плотностью и скоростью распространения упругих волн, отличающимися от аналогичных характеристик остальных пород земной толщи 51.
Сейсмический источник 54 расположен на земной поверхности 56. Сейсмический источник 54 создает регулируемые сейсмические волны, распространяющиеся сквозь земную толщу 51. Известные примеры сейсмических источников включают, не ограничиваясь этим, заряды взрывчатого вещества, автопередвижные вибросейсмические установки и системы гравитационного ускорения падающего груза, известные также как автопередвижные ударные источники сейсмических сигналов. Например, автопередвижной ударный источник сейсмических сигналов может производить удар по земной поверхности 56 посредством груза или "молота", создавая ударную нагрузку, которая распространяется в земной толще 51 в виде сейсмических волн. Эти сейсмические волны показаны стрелками 58, 60 и 62 и распространяются от сейсмического источника 43 вниз сквозь земную толщу.
Затем сейсмические волны отражаются, по меньшей мере частично, от поверхности слоя 52. Это происходит из-за разницы в плотности и/или скорости распространения упругих волн между слоем 52 и остальной земной толщей 51. После этого отраженные сейсмические волны 58', 60' и 62' распространяются вверх от слоя 52 к поверхности 56. На поверхности 56 отраженные сейсмические волны 58', 60' и 62' регистрируются сейсмическими датчиками 64, 66 и 68.
Сейсмический источник 54 может также возбуждать высокоамплитудные поверхностно-граничные волны 57, проходящие с малой скоростью вдоль поверхности 56 и регистрируемые одновременно с возвращающимися с большей глубины отраженными волнами 58', 60' и 62', имеющими гораздо более низкую амплитуду вследствие суммарных эффектов потери энергии в процессе распространения, включающих: геометрическое расхождение фронта волны, потери при прохождении границы раздела, малоамплитудное отражение и поглощение энергии на пути пробега. Суммарный эффект от этих потерь может определять разницу в амплитуде между различными сигналами, регистрируемыми датчиками 64, 66 и 68, составляющую порядка 75 дБ, в некоторых случаях - более 100 дБ.
После регистрации этих волн датчики могут сохранять и/или передавать данные, характеризующие зарегистрированную сейсмическую волну. Затем эти данные могут быть проанализированы с целью получения информации о структуре земной толщи 51, например о расположении слоя 52.
Выше приведено описание известной системы для сейсмической съемки, в котором делается упор на назначении сейсмических датчиков. Ясно, что описанное выше представляет собой лишь один из примеров, и земная толща может иметь гораздо более сложную структуру (то есть отличающуюся от структуры с единственным слоем 52). Соответственно, характер отражения волн может быть значительно более сложным, чем показано выше. Например, часть сейсмической волны, распространяющейся вниз, может не отразиться на границе раздела, а пройти сквозь слой 52. Эта волна может впоследствии отразиться от нижней поверхности слоя 52, что означает возможность поступления к любому заданному сейсмическому датчику нескольких отраженных волн.
Описанный выше принцип не ограничивается сейсмической съемкой на суше и может быть применен к морской сейсмической съемке. В этом случае земная толща 51 покрыта слоем воды. Сейсмические датчики 64, 66 и 68 могут находиться на морском дне или, в альтернативном варианте, на поверхности воды или в ее толще. Для морской сейсмической съемки могут быть использованы альтернативные сейсмические источники 54, такие как пневматическая пушка и плазменные источники звука.
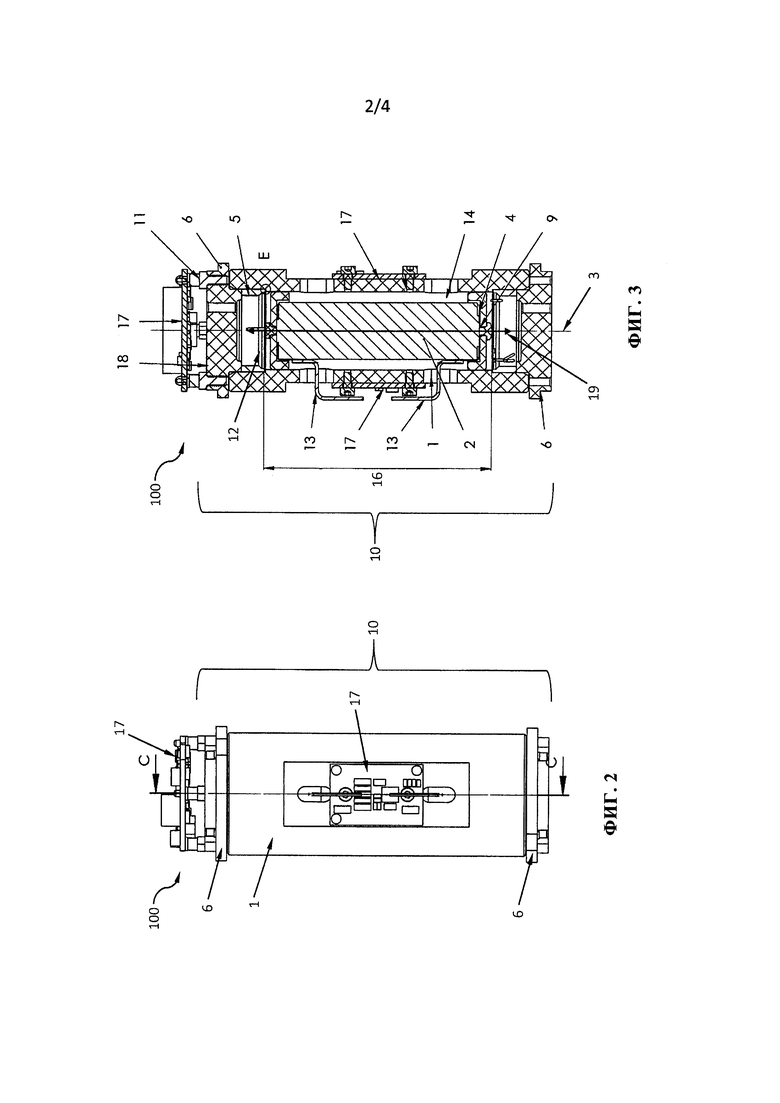
Ниже представлено описание устройства 100 для использования в системе 50 для сейсмической съемки (описанной выше), которое приводится со ссылками на фиг.2, 3 и 4. На фиг. 2 показан внешний вид устройства 100. На фиг. 3 то же устройство 100 представлено в разрезе вдоль линии С-С, показанной на фиг.2. На фиг.4 представлено укрупненное изображение в разрезе одного конца устройства 100.
На фиг. 2 показан общий вид устройства 100. Устройство 100 содержит корпус 10, который в данном примере включает стакан 1, на концах которого расположены крышки 6 в сборе. Внутри корпуса расположены ускоряемая масса и по меньшей мере один датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно корпуса (не показан, описывается ниже). Устройство 100 содержит электронную схему 17 (показана в верхней и боковой частях корпуса). Эта электронная схема соединяется с датчиком и выполнена с возможностью обработки выходного сигнала по меньшей мере одного датчика, например путем усиления, представления в цифровой форме, передачи и/или сохранения этого выходного сигнала датчика. Ясно, что в альтернативных вариантах электронная схема 17 может располагаться внутри корпуса или в каком-либо блоке, соединенном с корпусом проводами (не показан).
На фиг. 3 устройство 100, показанное на фиг.2, представлено в разрезе вдоль линии С-С. Здесь показан стакан 1 с торцевыми крышками 6 в сборе, расположенными на каждом конце. Показана также электронная схема 17, смонтированная на корпусе. Внутри стакана 1 расположена ускоряемая масса 14. В данном варианте осуществления предполагается, что стакан 1 и ускоряемая масса 14 представляют собой продолговатые цилиндры (причем стакан 1 представляет собой полый цилиндр), а продольная ось продолговатой ускоряемой массы 14 совпадает с продольной осью продолговатого стакана 1. Направление этих продольных осей показано линией 3 и в дальнейшем будет называться первым направлением 3.
Таким образом, ускоряемая масса 14 находится внутри корпуса 10 устройства и соединена с ним с возможностью перемещения. В устройстве предусмотрена возможность ограничения (посредством механизма, более подробно описанного ниже) перемещения ускоряемой массы 14 относительно корпуса 10 возвратно-поступательным движением в первом направлении 3, что показано двусторонней стрелкой 19. Это означает, что ускоряемая масса 14 может перемещаться, по меньшей мере в определенных пределах, назад и вперед в первом направлении 3, но ее перемещение может быть ограничено в направлении, перпендикулярном первому направлению 3.
Ускоряемая масса 14 содержит источник питания, например один или более аккумуляторных элементов 2, обеспечивающих подачу электрической энергии в устройство, в частности в электронную схему 17 через провода 13. Кроме того, в одном варианте осуществления настоящего изобретения ускоряемая масса 14 содержит регулируемые элементы, представленные ее концевыми деталями 4 и регулировочными винтами 9. Регулируемые элементы 4 и 9 позволяют изменять длину ускоряемой массы 14 вдоль ее продольной оси. Общая длина ускоряемой массы показана двусторонней стрелкой 16. Таким образом, регулируемые элементы 4 и 9 можно использовать для компенсации любых различий или отступлений от стандарта между разными аккумуляторными элементами 2.
Ниже будет показано, что аккумуляторный элемент 2 составляет большую часть ускоряемой массы 14. Другими словами, аккумуляторный элемент 2 представляет собой неотъемлемую составную часть ускоряемой массы 14. Это означает, что аккумуляторный элемент определяет значительную часть веса, объема и/или структуры ускоряемой массы 14. Например, аккумуляторный элемент 2 может определять по меньшей мере 75% ускоряемой массы по весу и/или объему.
На каждом конце стакана 1 расположены торцевые крышки 6 в сборе, закрывающие стакан для удержания ускоряемой массы 14 внутри корпуса устройства 100. Торцевые крышки 6 в сборе также содержат по меньшей мере один датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно стакана 1 в первом направлении 3. Эти торцевые крышки 6 в сборе более подробно описаны ниже применительно к фиг.4; тем не менее, на фиг. 3 показаны корпус 18 торцевой крышки в сборе, крепящейся к стакану посредством одного или более винтов 11, и стопорный элемент 5, удерживающий уплощенный элемент 12.
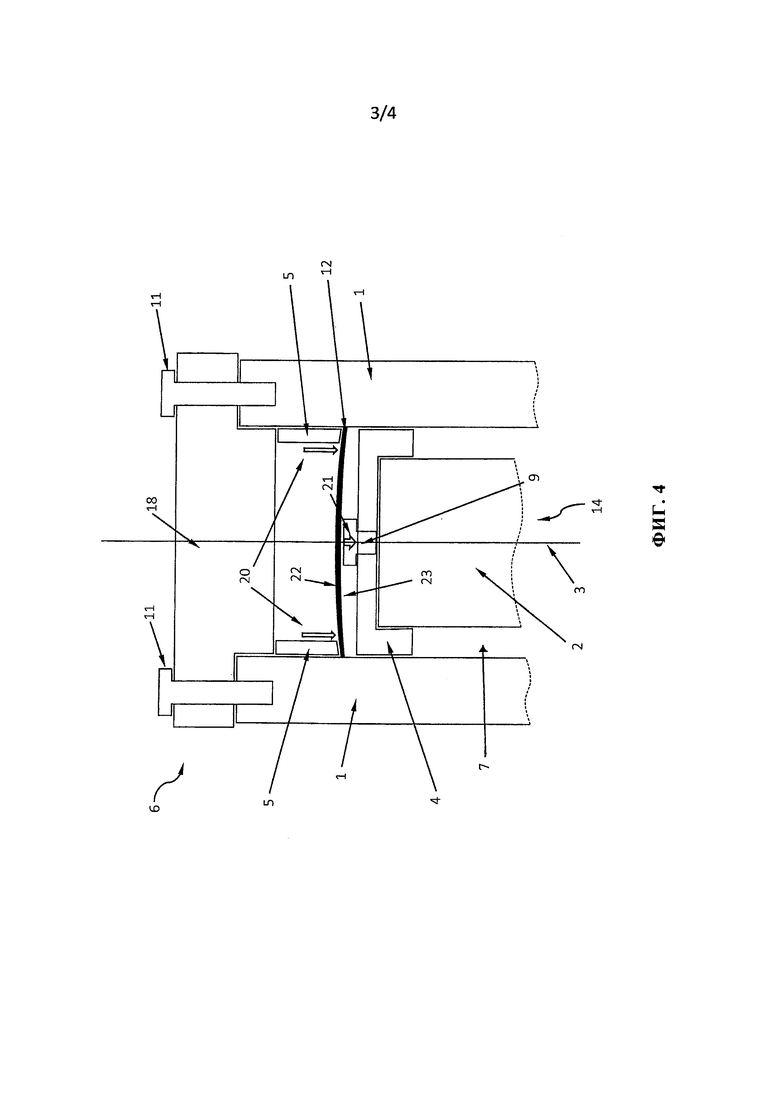
На фиг. 4 торцевая крышка 6 в сборе показана более подробно. Ясно, что по меньшей мере в представленных вариантах осуществления настоящего изобретения обе торцевые крышки в сборе являются одинаковыми, в связи с чем описание одной крышки применимо и к другой.
Как упоминалось выше, торцевая крышка 6 в сборе закрывает конец стакана 1 для удержания ускоряемой массы 14 внутри корпуса устройства. Ускоряемая масса 14 содержит аккумуляторный элемент 2 и регулируемые элементы 4 и 9. Торцевая крышка 6 в сборе содержит корпус 18, стопорный элемент 5 и уплощенный элемент 12.
Корпус 18 торцевой крышки крепится к концу стакана 1. Как показано на чертеже, это может быть сделано с помощью крепежных винтов 11. В альтернативном варианте корпус 18 торцевой крышки может крепиться к стакану посредством приклеивания, термической сварки, ультразвуковой сварки, пластического формования, плотной посадки или защелкивания либо ввинчиваться в стакан с помощью резьбы.
Корпус 18 торцевой крышки опирается на стопорный элемент 5 внутри стакана. Стопорный элемент может представлять собой отдельную деталь, как это показано на чертеже. Однако в других вариантах осуществления настоящего изобретения корпус 18 торцевой крышки и стопорный элемент 5 могут быть выполнены как единое целое. В этом варианте осуществления стакан 1 имеет цилиндрическую форму, поэтому стопорный элемент 5 может иметь форму кольца, прилегающего к внутренней поверхности цилиндрического стакана 1. Стопорный элемент 5 прикладывает фиксирующее усилие, показанное стрелками 20, по периметру верхней поверхности 22 уплощенного элемента 12. Ясно, что в этом варианте осуществления настоящего изобретения уплощенный элемент 12 представляет собой диск.
С нижней поверхностью 23 уплощенного элемента 12 контактирует ускоряемая масса 14. В данном варианте осуществления настоящего изобретения с поверхностью 23 контактирует один из регулируемых элементов, а именно регулировочный винт 9. Поэтому уплощенный элемент 12 прикладывает к ускоряемой массе 14 прижимное усилие 21, равное фиксирующему усилию 20. Ускоряемая масса 14 может контактировать с поверхностью 23 уплощенного элемента 12 в центре или вблизи центра последнего - другими словами, точка контакта находится ближе к центру уплощенного элемента 12, чем к его периметру.
Уплощенный элемент 12 обладает гибкостью в первом направлении 3 благодаря тому, что он имеет сравнительно небольшую толщину в этом направлении по сравнению с направлениями, перпендикулярными ему. Поэтому ускоряемая масса 14 имеет возможность совершать возвратно-поступательное движение в первом направлении 3, будучи прижатой уплощенным элементом 12.
Уплощенный элемент 12 может содержать один или более датчиков, измеряющих его отклонение при изгибе. Например, уплощенный элемент может содержать один или более пьезоэлектрических элементов, обнаруживающих перемещение ускоряемой массы 14 относительно стакана 1. Как известно из уровня техники, при изгибании пьезоэлектрического элемента он генерирует потенциал или заряд, на выходе пропорциональный отклонению при изгибе, или механической деформации. Этот выходной потенциал или заряд может быть зарегистрирован, например, электронной схемой 17, генерирующей сигнал, характеристический для перемещения ускоряемой массы 14.
Один или более пьезоэлектрических элементов могут содержать жесткую керамику, такую как цирконат-титанат свинца (ЦВС). Один или более пьезоэлектрических элементов могут быть объединены (например, соединены или уложены слоями) с опорным материалом, или подложкой, благодаря чему уплощенный элемент 12 приобретает упругую податливость и прочность, достаточные для прижима без разрушения ускоряемой массы 14, а также жесткость на изгиб, более высокую, чем у жесткого керамического пьезоэлектрического элемента. Опорный материал может быть электропроводящим. Следовательно, уплощенный элемент 12 может содержать пьезоэлектрический датчик в форме диска.
На фиг. 4 показана поверхность 23 уплощенного элемента 12, которая контактирует с ускоряемой массой 14 и имеет вогнутость в направлении последней. Это может быть запланированной конструктивной особенностью (то есть исполнением уплощенного элемента 12 в требуемой форме), но может быть также вызвано силами, действующими на уплощенный элемент 12. Другими словами, вогнутость поверхности 23 может быть обусловлена изгибанием уплощенного элемента 12 под воздействием прижимного усилия 20 и противодействующего усилия, обусловленного контактом ускоряемой массы 14 с поверхностью уплощенного элемента 12 (который, как было отмечено выше, происходит по существу в центре уплощенного элемента 12). Для реализации этого предварительного напряжения устройство может быть выполнено таким образом, что стопорные элементы 5 торцевых крышек 6 в сборе воздействуют на соответствующие уплощенные элементы 12 по направлению внутрь в достаточной степени, чтобы неизбежно достигалась кривизна этих элементов (обусловленная несжимаемостью ускоряемой массы 14). Соответствующее предварительное напряжение и, следовательно, кривизну можно получить, изменяя длину ускоряемой массы 14 в первом направлении 3 с помощью регулировочного винта 9.
Данное конструктивное исполнение обеспечивает получение определенных результатов. Во-первых, можно подвергнуть предварительному напряжению любые элементы пьезоэлектрических датчиков. Тем самым обеспечивается более предсказуемая реакция пьезоэлектрического элемента на любое изгибание уплощенного элемента 12 и, следовательно, повышается точность восприятия. Далее, вогнутая поверхность может обеспечить направленное внутрь радиальное воздействие на ускоряемую массу 14. Это может способствовать центрированию ускоряемой массы внутри стакана 1, что обеспечивает минимальный контакт (и следовательно, минимальное трение) между ускоряемой массой 14 и стаканом 1. Кроме того, при предварительном напряжении пьезоэлектрического элемента движение ускоряемой массы от этого элемента воспринимается как движение последнего в более "стационарное" положение. В отсутствие предварительного напряжения это движение от пьезоэлектрического элемента может не быть обнаружено.
Следовательно, торцевая крышка 6 в сборе, выполняет (посредством уплощенного элемента 12, удерживаемого стопорным элементом 5 и контактирующего с ускоряемой массой 14) две функции: во-первых, прижимает ускоряемую массу 14, соединяя ее с корпусом датчика (стакан 1 и торцевые крышки 6 в сборе) и ограничивая перемещение ускоряемой массы относительно корпуса возвратно-поступательным движением в первом направлении 3, и, во-вторых, обнаруживает любое перемещение ускоряемой массы относительно корпуса в этом первом направлении 3.
Было установлено, что соотношение высоты и диаметра ускоряемой массы, составляющее от 2:1 до 5:1, является предпочтительным в случае устройств, используемых при проведении сейсмической съемки в нефтегазовой отрасли. Если корпус соответствует по форме и размерам ускоряемой массе, то такие пропорции позволяют получить подходящий вес ускоряемой массы и вместе с тем обеспечивают сравнительно легкую установку устройств в грунте.
В процессе эксплуатации размещают несколько устройств 100 на поверхности или внутри земной толщи. Каждое такое устройство может быть, например, прикреплено к штырю, который вдавливается в грунт. В альтернативном варианте устройство может быть целиком размещено в грунте или спущено на определенную глубину в скважину. Каждое устройство 100 можно разместить таким образом, что первое направление будет вертикальным. Приход (вступление) продольной сейсмической волны вызывает перемещение корпуса устройств 100 с выраженной вертикальной компонентой. Инерция ускоряемой массы 14 обусловливает ее сопротивление движению вместе со смещением корпуса, и в результате ускоряемая масса будет перемещаться относительно корпуса. Это перемещение приводит к изгибанию уплощенных элементов 12. Можно отметить, что перемещение ускоряемой массы относительно корпуса в первом направлении вызывает повышение или понижение степени изгиба уплощенного элемента относительно изгиба последнего, когда он находится в "стационарном положении", то есть когда ускоряемая масса не перемещается относительно корпуса. Полученное отклонение при изгибе обнаруживается пьезоэлектрическими датчиками внутри уплощенных элементов 12 и может быть измерено, передано и/или сохранено электронной схемой 17. Полученные данные могут быть затем проанализированы для определения структуры земной толщи 51.
Следовательно, описанное выше устройство способно регистрировать сейсмические волны и при этом имеет компактную конструкцию и малый вес.
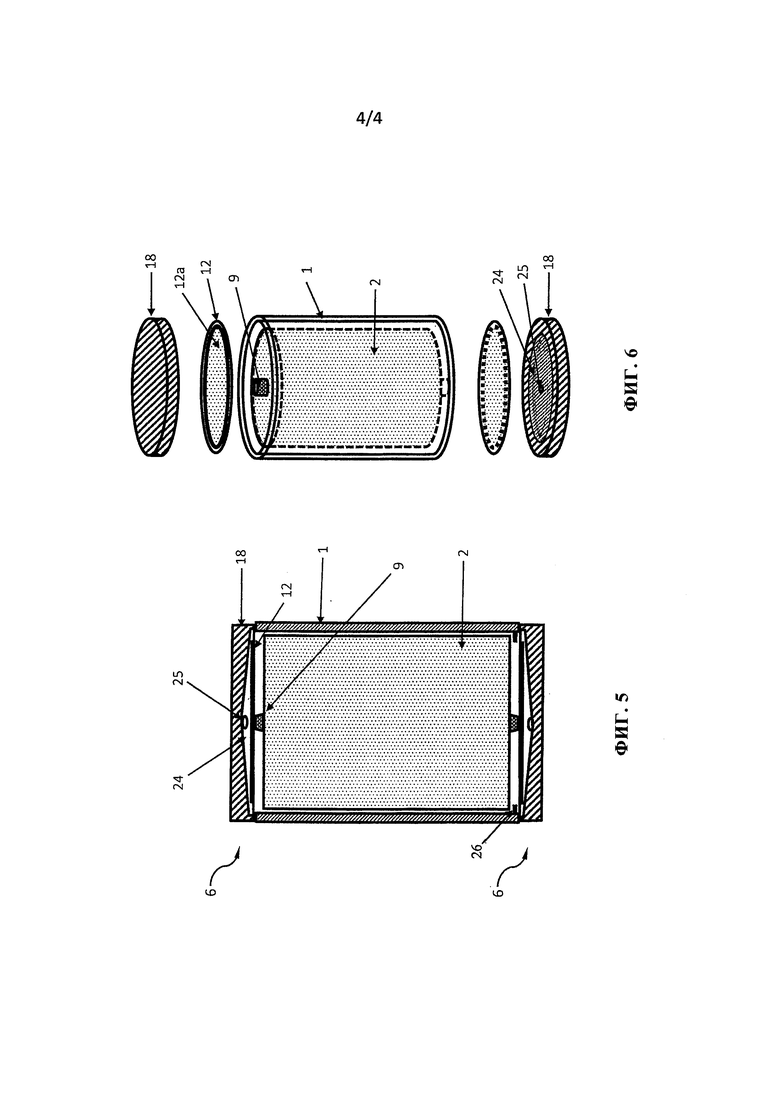
На фиг. 5 и 6 показан еще один вариант осуществления устройства, предназначенного для использования при проведении сейсмической съемки. Это устройство имеет много общего с устройством, описанным выше, и одинаковые элементы в нем обозначены такими же ссылочными номерами. Ясно, что отличительные признаки этого варианта осуществления изобретения можно комбинировать с отличительными признаками варианта осуществления, описанного выше.
Устройство содержит стакан 1, имеющий на каждом конце крышку 6 в сборе. Внутри стакана расположена ускоряемая масса 2, соединенная со стаканом посредством уплощенных элементов 12, удерживаемых корпусами 18 торцевых крышек. В стакане предусмотрен выступ 26 в форме заплечика, который может ограничивать перемещение ускоряемой массы с целью защиты пьезоэлектрического элемента в случае падения устройства.
Каждая торцевая крышка содержит полость 24, в которой может быть размещен уплощенный элемент 12. Каждая полость, кроме того, содержит ограничитель 25 смещения. Назначение этого ограничителя 25 смещения состоит в ограничении степени деформации уплощенного элемента в результате ограничения смещения ускоряемой массы 2 внутри устройства. Это может предотвратить повреждение уплощенного элемента 12. В ходе обычной работы устройства, то есть регистрации сейсмических сигналов, смещения ускоряемой массы 2 будет недостаточно для того, чтобы уплощенный элемент 12 вошел в контакт с ограничителем 25 смещения, и поэтому ограничитель 25 смещения не окажет отрицательного воздействия на работу устройства. Однако в случае падения устройства или воздействия на него большой перегрузки каким-либо иным образом уплощенный элемент 12 может быть деформирован в результате смещения ускоряемой массы 2 на величину, достаточную для вхождения уплощенного элемента в контакт с ограничителем 25 смещения. Ограничитель 25 смещения предохраняет от дальнейшего смещения или уменьшает его, тем самым защищая уплощенный элемент 12 от повреждения вследствие избыточной деформации. Сам ограничитель 25 смещения можно расположить таким образом, что деформация уплощенного элемента 12 будет ограничена заданной величиной на основе, например, конструкции уплощенного элемента 12. Ограничитель 25 смещения может представлять собой жесткий или гибкий элемент, способный поглощать ограниченную ударную нагрузку и, следовательно, снижать вероятность повреждения уплощенного элемента 12.
Как упоминалось выше, прижимное усилие, прикладываемое уплощенными элементами 12 к ускоряемой массе 14, ограничивает перемещение ускоряемой массы 14 относительно корпуса возвратно-поступательным движением в первом направлении 3. В качестве альтернативы или дополнения может быть предусмотрено, что по меньшей мере часть поперечного сечения стакана 1, перпендикулярного его продольной оси, может соответствовать по меньшей мере части поперечного сечения ускоряемой массы 14, перпендикулярного ее продольной оси. Следствием этого является ограничение перемещения ускоряемой массы возвратно-поступательным движением относительно корпуса в первом направлении. Например, концевые детали 4 ускоряемой массы могут иметь наружный диаметр, почти равный внутреннему диаметру стакана 1. Благодаря этому становится возможным небольшое перемещение ускоряемой массы 14 в направлении, перпендикулярном первому направлению 3. Соответствие стакана 1 и ускоряемой массы 14 находится в пределах достаточно жесткого допуска с целью предотвращения раскачивания или вращательного движения вокруг центра тяжести ускоряемой массы 14 в сборе.
Прилегающие поверхности ускоряемой массы 14 и/или стакана 1 могут быть покрыты материалом с низким коэффициентом трения с целью обеспечения перемещения ускоряемой массы 14 относительно стакана.
Ускоряемая масса 14 и стакан 1 могут иметь не цилиндрическую (как описано выше), а любую форму. Это может, в частности, зависеть от размеров и формы аккумуляторного элемента 2. Например, можно использовать кубический аккумуляторный элемент и стакан 1 соответствующей формы.
Как упоминалось выше, ускоряемая масса может быть снабжена регулируемыми элементами 4 и 9, позволяющими изменять ее длину. Это может потребоваться в тех случаях, когда, например, длина аккумуляторного элемента 2 не вполне соответствует стандарту. В других вариантах осуществления настоящего изобретения такую регулировку длины можно выполнять с помощью распорных компонентов промышленного производства соответствующих размеров, имеющих концевые детали 4 разной величины, компоненты, изготовленные методом литья под давлением, или элементы припуска, подвергаемые в процессе производства механической обработке для коррекции размеров. В других вариантах осуществления настоящего изобретения торцевые крышки 6 в сборе могут содержать подходящие регулируемые элементы, позволяющие изменять расстояние между обращенными друг к другу вогнутыми поверхностями 23 уплощенных элементов 12 (на каждом конце). Это можно реализовать, предусмотрев в крышке регулировочные элементы, например винты 11, позволяющие регулировать зазор между стаканом и крышкой. Аналогичным образом, можно регулировать длину стопорного элемента 5 в первом направлении, используя один из нескольких таких стопорных элементов 5 разной длины или подвергая этот стопорный элемент 5 механической обработке до получения требуемой длины в процессе производства. В целом, подходящие элементы для регулировки длины могут представлять собой компоненты ускоряемой массы и/или пьезоэлектрической подложки или крепиться к ним.
В других вариантах осуществления настоящего изобретения регулировка может выполняться путем изменения длины стакана в процессе производства или изготовления стаканов разной длины, из которых можно выбрать требуемый. Аналогичным образом, можно изготовить выводы аккумуляторного элемента, форма и длина которых подходят для реализации предварительного напряжения уплощенного элемента 12.
В некоторых вариантах осуществления настоящего изобретения для приведения в соответствие стандарту аккумуляторных элементов, недостаточно подходящих для использования в различных устройствах, может быть предусмотрен балластный груз, вес которого составляет малую часть общего веса ускоряемой массы.
Регулировочный винт 9 ускоряемой массы 14 обеспечивает вхождение в контакт уплощенного элемента 12 и ускоряемой массы на небольшой площади. В некоторых вариантах осуществления настоящего изобретения этот винт может отсутствовать, а в тех же целях может быть предусмотрен подходящий выступ, обеспечивающий контакт уплощенного элемента 12 на площади, малой по сравнению с общей площадью этого элемента.
В некоторых вариантах осуществления настоящего изобретения для обнаружения перемещения ускоряемой массы 14 может использоваться не пьезоэлектрический датчик, а система, включающая магнитный, емкостной, электростатический, фотооптический или иной преобразователь.
Хотя описанное выше относится к продолговатому цилиндру, рассматриваются и другие конструкции, в которых аккумуляторный элемент 2 является составной частью ускоряемой массы 14. Например, один или более аккумуляторных элементов можно расположить таким образом, что их продольные оси будут параллельны плоскости датчика, как в случае продолговатой рифленой пьезоэлектрической пластины. В альтернативном варианте уплощенный элемент 12 может быть расположен в виде прослойки между двумя аккумуляторными элементами, которые образуют ускоряемую, или реактивную, массу и один из которых находится над, а другой - под пьезоэлектрическим датчиком. В этом случае тоже обеспечивается снижение веса устройства.
В некоторых вариантах осуществления настоящего изобретения датчик-геофон содержит четное число уплощенных элементов 12, равномерно расположенных на противоположных концах ускоряемой массы 14. Каждый уплощенный элемент 12 может также служить опорой для одного или более пьезоэлектрических элементов, соединенных с поверхностью(-ями) уплощенного элемента 12 для образования пьезоэлектрических датчиков. Датчики могут быть расположены и соединены проводами таким образом, что относительное перемещение стакана 1 и реактивной массы 14 будет приводить к изгибанию спаренных уплощенных элементов 12 в противоположных направлениях. В данной конструкции относительное перемещение ускоряемой массы 14 приводит к тому, что один из уплощенных элементов 12 становится более вогнутым, тогда как противоположный уплощенный элемент - менее вогнутым. В одном варианте осуществления настоящего изобретения, в котором пьезоэлектрический элемент соединяется с наружной поверхностью 22 каждого уплощенного элемента 12, однократное перемещение ускоряемой массы 14 приводит к образованию положительного напряжения или тока в одном датчике и отрицательного выходного напряжения в другом, причем все происходит наоборот, когда ускоряемая масса 14 перемещается в противоположном направлении. При последовательном подключении пар датчиков с соблюдением полярности электрического сигнала на выходе амплитуда сигнала напряжения будет в два раза превышать соответствующую амплитуду у единственного датчика, что означает наличие вклада выходного сигнала данной конфигурации пьезоэлектрических датчиков в усиление сигнала. Аналогичным образом, можно получить двукратное усиление токового выходного сигнала при правильном параллельном соединении пар. Это позволяет повысить чувствительность датчика при почти таких же стоимости и размерах.
Данная схема, которую можно рассматривать как дифференциальную двухтактную схему, также обеспечивает низкий уровень шумов, величина снижения которого приблизительно определяется как квадратный корень из числа пьезоэлектрических элементов, включенных по этой дифференциальной схеме. Этот благоприятный эффект возникает благодаря сложению электрических сигналов датчиков и частичному подавлению любых шумов, например независимых случайных собственных шумов, генерируемых вследствие термоионной эмиссии каждым отдельным датчиком. Данная схема вместе с дифференциальным входом аналоговой электронной схемы также способствуют дополнительному ослаблению синфазных шумов от внешних источников, таких как индуктивная наводка от линий электропередачи или интерференционные помехи от радиоволн.
Кроме того, данная схема обеспечивает снижение гармонических искажений, вызываемых в противном случае каждым отдельным датчиком, демонстрирующим некоторую степень нелинейности характеристики преобразования. Например, поскольку уплощенный элемент 12 в качестве пружины может иметь податливость, не вполне следующую закону Гука, реакция этого элемента на перемещение ускоряемой массы может быть нелинейной. В случае единственного датчика это проявляется в форме компонент гармонических искажений четного порядка в выходном сигнале датчика, различающихся в зависимости от того, в каком направлении изгибается уплощенный элемент 12. Когда выходной сигнал одного датчика складывается с сигналом второго датчика пары, находящегося на противоположном конце ускоряемой массы 14 и изгибающегося в противоположном направлении относительно ориентации пьезоэлектрического материала, компоненты искажений тоже имеют противоположную полярность, вследствие чего гармоники четного порядка подавляются при суммировании выходного сигнала дифференциальным входом электронной схемы. Хотя в настоящем описании сказано о соединении ускоряемой массы 14 и корпуса, ясно, что это может означать как физическое соединение, например путем приложения прижимного усилия уплощенным элементом 12, так и магнитное или электрическое соединение. Другими словами, в некоторых вариантах осуществления настоящего изобретения ускоряемая масса 14 может быть подвешена внутри корпуса устройства с помощью магнитного или электрического поля без физического контакта с какой-либо частью корпуса.
Следует иметь в виду, что любой отличительный признак, описанный применительно к какому-либо варианту осуществления настоящего изобретения, можно использовать как в отдельности, так и в комбинации с другими описанными отличительными признаками, а также в комбинации с одним или более отличительными признаками из любых других вариантов осуществления изобретения или в любой комбинации любых других вариантов осуществления изобретения. Кроме того, можно также использовать любые эквивалентные варианты и модификации в рамках объема изобретения, определяемого приложенной формулой изобретения. Например, устройство может быть выполнено как устройство одно- или многоразового использования. Описанное устройство применимо для проведения сейсмической съемки как на суше, так и на море. Отличительные признаки, указанные в формуле изобретения, можно комбинировать в сочетаниях, отличающихся от приведенных в этой формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| СЕЙСМИЧЕСКИЕ ДАТЧИКОВЫЕ УСТРОЙСТВА | 2009 |
|
RU2528594C2 |
| ГЕОФОН С НАСТРАИВАЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2013 |
|
RU2627995C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2004 |
|
RU2416810C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЁМНИКА ПРИ СЕЙСМОРАЗВЕДКЕ | 2002 |
|
RU2293362C2 |
| МНОГОКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР С ОДНОЙ МАССОЙ | 2016 |
|
RU2733974C2 |
| СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2010 |
|
RU2523734C2 |
| СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2015 |
|
RU2598622C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2021 |
|
RU2777271C1 |
Изобретение относится к области геофизики и может быть использовано в процессе проведения сейсмической съемки. Описано устройство для сейсмической съемки, содержащее корпус, ускоряемую массу, по меньшей мере один датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно корпуса, электронную схему, соединенную с упомянутым по меньшей мере одним датчиком и выполненную с возможностью получения и обработки выходного сигнала этого датчика, и источник питания, выполненный с возможностью подачи электрической энергии в электронную схему и представляющий собой составную часть ускоряемой массы. Причем датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно корпуса, содержит один или более пьезоэлектрических элементов. Технический результат – повышение чувствительности устройства. 19 з.п. ф-лы, 6 ил.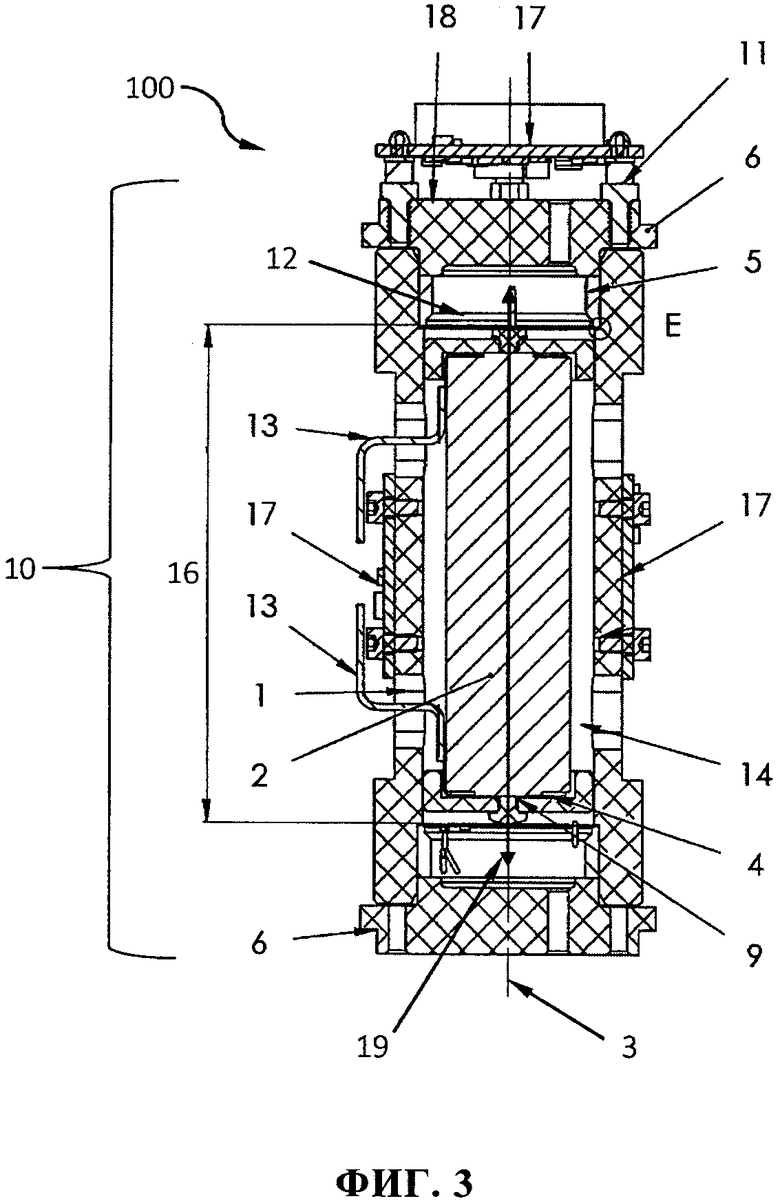
1. Устройство для сейсмической съемки, содержащее:
корпус;
ускоряемую массу;
по меньшей мере один датчик, выполненный с возможностью обнаружения перемещения ускоряемой массы относительно корпуса и содержащий один или более пьезоэлектрических элементов, выполненных с возможностью обнаружения перемещения ускоряемой массы;
электронную схему, соединенную с упомянутым по меньшей мере одним датчиком и выполненную с возможностью получения и обработки выходного сигнала этого датчика; и
источник питания, выполненный с возможностью подачи электрической энергии в электронную схему и представляющий собой составную часть ускоряемой массы.
2. Устройство по п. 1, в котором источник питания содержит батарею.
3. Устройство по п. 1, содержащее:
два датчика, каждый из которых содержит плоский пьезоэлектрический элемент,
причем пьезоэлектрические элементы расположены на противоположных сторонах ускоряемой массы для обнаружения перемещения ускоряемой массы относительно корпуса, а корпус выполнен с возможностью ограничения упомянутого перемещения ускоряемой массы возвратно-поступательным движением в первом направлении между пьезоэлектрическими элементами.
4. Устройство по п. 1, в котором упомянутый пьезоэлектрический элемент содержит жесткую керамику.
5. Устройство по п. 1, в котором пьезоэлектрический(-е) элемент(-ы) находится(-ятся) в состоянии предварительного напряжения.
6. Устройство по п. 1, в котором ускоряемая масса расположена в полости корпуса с возможностью перемещения.
7. Устройство по п. 1, в котором ускоряемая масса соединена с корпусом с возможностью перемещения.
8. Устройство по п. 1, выполненное с возможностью ограничения перемещения ускоряемой массы относительно корпуса возвратно-поступательным движением в первом направлении, а по меньшей мере один датчик выполнен с возможностью обнаружения указанного возвратно-поступательного движения ускоряемой массы в первом направлении и тем самым обнаружения перемещения ускоряемой массы относительно корпуса.
9. Устройство по п. 1, в котором ускоряемая масса представляет собой продолговатый элемент, имеющий продольную ось, корпус представляет собой продолговатый стакан, имеющий продольную ось, которая совпадает с продольной осью продолговатого стакана.
10. Устройство по п. 9, выполненное с возможностью ограничения перемещения ускоряемой массы относительно корпуса возвратно-поступательным движением в первом направлении, причем по меньшей мере один датчик выполнен с возможностью обнаружения указанного возвратно-поступательного движения ускоряемой массы в первом направлении и тем самым обнаружения перемещения ускоряемой массы относительно корпуса, а первое направление совпадает с коаксиальными продольными осями продолговатого элемента и продолговатого стакана.
11. Устройство по п. 10, в котором по меньшей мере часть поперечного сечения продолговатого стакана, перпендикулярного его продольной оси, соответствует по меньшей мере части поперечного сечения продолговатого элемента, перпендикулярного его продольной оси, вследствие чего перемещение ускоряемой массы относительно корпуса ограничивается возвратно-поступательным движением в первом направлении.
12. Устройство по п. 9, в котором продолговатый элемент содержит регулируемые детали, выполненные с возможностью изменения длины продолговатого элемента вдоль продольной оси.
13. Устройство по п. 9, в котором на каждом конце стакана предусмотрен узел крышки, выполненный с возможностью удержания продолговатого элемента внутри стакана и по меньшей мере один из указанных узлов содержит по меньшей мере один датчик.
14. Устройство по п. 13, в котором узлы крышек содержат вогнутые поверхности, контактирующие с продолговатым элементом.
15. Устройство по п. 14, в котором вогнутые поверхности выполнены с возможностью совместного приложения к продолговатому элементу прижимного усилия, вследствие чего перемещение продолговатого элемента относительно корпуса ограничивается возвратно-поступательным движением в первом направлении.
16. Устройство по п. 14, в котором каждый узел крышки содержит уплощенный элемент, размещенный так, что он контактирует своей первой поверхностью с продолговатым элементом, и стопорный элемент, размещенный с возможностью приложения прижимного усилия по периметру второй поверхности уплощенного элемента, обращенной к первой поверхности.
17. Устройство по п. 16, в котором вогнутость первой поверхности вызвана изгибанием уплощенного элемента вследствие приложения прижимного усилия и противоположно направленного усилия, обусловленного контактом продолговатого элемента с первой поверхностью.
18. Устройство по п. 16, в котором по меньшей мере один из уплощенных элементов содержит по меньшей мере один датчик.
19. Устройство по п. 1, в котором по меньшей мере 75% ускоряемой массы по весу и/или объему обусловлено источником питания.
20. Устройство по п. 1, в котором в корпусе предусмотрен выступ для вхождения в зацепление с ускоряемой массой для ограничения ее перемещения.
| US 7284431 B1, 23.10.2007US 3911388 A, 07.10.1975 | |||
| US 4315433 A,16.02.1982 | |||
| МНОГОКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1994 |
|
RU2084003C1 |
| Пьезоэлектрический сейсмометр | 1981 |
|
SU995044A1 |
| Пьезоэлектрический акселерометр | 1980 |
|
SU1023241A1 |
| Конструкция нижнего распределительного устройства | 1968 |
|
SU292349A1 |

