Область техники
Настоящее изобретение относится к контроллеру вращающейся электрической машины, причем к контроллеру, способному к выполнению управления вращением, получая информацию о положении ротора без использования датчика положения ротора во вращающейся электрической машине, такой как асинхронная машина, синхронная машина и тому подобное.
Предшествующий уровень техники
Для того чтобы точно управлять операцией вращения вращающейся электрической машины, требуется информация о положении ротора вращающейся электрической машины и информация о токе, протекающем во вращающейся электрической машине. Традиционно, информация о положении ротора получается посредством отдельной установки датчика положения ротора во вращающуюся электрическую машину. Однако существенно невыгодно отдельно устанавливать датчик положения ротора с точки зрения снижения затрат, экономии пространства и увеличения надежности, и, таким образом, существует потребность в бессенсорном способе, который не требует датчика положения ротора.
В качестве бессенсорного способа управления, не требующего датчика положения ротора во вращающейся электрической машине, главным образом, используют следующие способы: способ, в котором положение ротора вращающейся электрической машины оценивается на основании наведенного напряжения вращающейся электрической машины; и способ, в котором положение ротора вращающейся электрической машины оценивается с использованием явнополюсности. Поскольку величина наведенного напряжения, используемого в первом способе, типично пропорциональна частоте вращения вращающейся электрической машины, наведенное напряжение уменьшается на близкой к нулю частоте вращения или в диапазоне низких частот вращения, а отношение S/N (сигнал/шум) ухудшается. Поэтому трудно оценивать положение ротора вращающейся электрической машины. С другой стороны, в последнем способе, который использует явнополюсность, сигнал оценки положения ротора для оценки положения ротора вращающейся электрической машины необходимо вводить во вращающуюся электрическую машину, однако полезно, чтобы положение ротора вращающейся электрической машины могло оцениваться независимо от частоты вращения вращающейся электрической машины. Поэтому бессенсорный способ управления, использующий явнополюсность, применяется для детектирования положения в диапазоне, близком к нулю или низких частот вращения.
Традиционно в бессенсорном способе управления, использующем явнополюсность, для того чтобы формировать высокочастотные сигналы (для детектирования положения ротора с магнитными полюсами), которые отличны от частоты возбуждения для вращающейся электрической машины, в качестве сигналов для оценки положения ротора сигналы несущей трех фаз, каждый из которых имеет произвольную частоту и формируется генератором сигнала несущей, подвергаются сдвигу по фазе фазосдвигающим устройством, а фазы у фазы V и фазы W сдвигаются на угол Δθ и угол 2Δθ соответственно по отношению к фазе U. Сдвинутые по фазе сигналы сравниваются со значениями команд напряжения посредством использования компаратора для формирования сигналов переключения, которые затем вводятся в инверторную схему. В инверторной схеме высокочастотные токи трех фаз, которые формируются вследствие приведения в действие вращающейся электрической машины сигналами переключения, выделяются через полосовой фильтр (ПФ, BPF). Затем высокочастотные токи трех фаз преобразуются преобразователем координат по оси α, оси β, оси α' и оси β' и извлекаются пиковые значения составляющих тока, а затем подвергаются процессу усреднения посредством использования блока вычисления абсолютного значения и фильтра нижних частот, а затем θ блоком вычисления положения магнитного полюса оценивается угол θ (например, см. патентный документ 1).
Дополнительно в качестве еще одного традиционного способа, который использует явнополюсность, известен способ, в котором в качестве координат управления используется прямоугольная система координат в осях d-q, которая вращается синхронно с ротором или вектором магнитного потока, и высокочастотный сигнал накладывается на значение команды тока намагничивания оси d, с тем чтобы детектировать токи, протекающие во вращающуюся электрическую машину. Двухфазные токи получаются трехфазным/двухфазным преобразованием вышеприведенных токов. Вычисляется квадрат амплитуды вектора каждого детектированного тока, который является суммой квадратов токов двух фаз, и вычисляется сумма квадрата значения команды тока намагничивания оси d и квадрата значения команды тока вращающего момента оси q, то есть квадрат амплитуды вектора тока команды, и квадрат амплитуды вектора тока команды вычитается из квадрата амплитуды вектора тока детектирования. На основании значения, полученного вычитанием, вычисляется отклонение от координат управления, посредством чего оценивается положение ротора во вращающейся электрической машине (например, см. патентный документ 2).
С другой стороны, информация о токе, протекающем во вращающуюся электрическую машину, традиционно детектируется посредством компоновки множества датчиков тока между средством приложения напряжения, таким как инвертор или тому подобное, и вращающейся электрической машиной, и детектированием посредством использования датчиков тока, причем тока вращающейся электрической машины, протекающего между средством приложения напряжения и вращающейся электрической машиной. Например, в случае трехфазной вращающейся электрической машины переменного тока токи вращающейся электрической машины, по меньшей мере, двух фаз из числа трех фаз детектируются с использованием двух датчиков тока. Однако компоновка множества датчиков тока требует дополнительных затрат. Таким образом, ради снижения затрат на датчики тока существует способ, в котором только один датчик тока используется для детектирования значения постоянного тока шины, протекающего между источником напряжения постоянного тока, который является источником входного сигнала в средство приложения напряжения, такое как инвертор или тому подобное, и инвертором, с тем чтобы вычислять и идентифицировать фазу вращающейся электрической машины, в которой ток протекает во время детектирования в соответствии с разницей шаблонов переключения ключей соответственных фаз средства приложения напряжения, такого как инвертор или тому подобное.
Вышеприведенный способ увеличивает снижение затрат на датчики тока. Однако когда значения команд напряжения перекрываются или близки друг к другу, например, когда коэффициент модуляции основных гармоник для приведения в действие вращающейся электрической машины мал или когда значения команд двух фаз, среди значений команд напряжения трех фаз, перекрываются друг с другом, то переключающие элементы соответственных фаз средства приложения напряжения, такого как инвертор или тому подобное, выполняют переключение по существу одновременно, что приводит, по существу, к отсутствию разницы в шаблоне переключения. Поэтому способ имеет проблему в том, что трудно идентифицировать фазу вращающейся электрической машины, в которой протекает ток.
Для решения вышеприведенной проблемы традиционно предлагается способ, который комбинируется с бессенсорным управлением, и в этом способе несущие трех фаз подготавливаются для оценки положения ротора посредством использования высокочастотных токов, формируемых модуляцией несущих трех фаз, а несущие трех фаз, используемые для оценки положения ротора, используются для формирования разницы в шаблонах переключения переключающих элементов соответственных фаз средства приложения напряжения, такого как инвертор или тому подобное, тем самым детектируя постоянный ток шины, даже когда коэффициент модуляции основных гармоник для приведения в действие вращающейся электрической машины мал. Соответственно можно идентифицировать фазу вращающейся электрической машины, в которой протекает ток, и вычислять ток, протекающий во вращающуюся электрическую машину (например, см. непатентный документ 1).
Патентный документ 1: выложенная публикация № 2003-52193 патента Японии
Патентный документ 2: патент № 3707528 Японии
Непатентный документ 1: Initial Rotor Position Estimation Characteristics of Mechanical-Current Segsorless IPM Motor Using PWM Harmonics Detected in DC-Bus Current (I.E.E. Japan Industry Application Society Conference (характеристики оценки начального положения ротора электродвигателя с электромеханическим бессенсорным ИСМ с использованием гармоник ШИМ, детектированных в постоянном токе шины (конференция японского общества промышленных применений Института инженеров по электротехнике), 1-100 (2005)).
В доступном для коммерческого приобретения микрокомпьютере общего назначения для управления вращающейся электрической машиной один сигнал несущей используется для выполнения (PWM) ШИМ-модуляции по командам напряжения трех фаз. С другой стороны, в патентном документе 1, для того чтобы формировать сигнал оценки положения, подготавливаются сигналы несущих трех фаз, а в непатентном документе 1, для того чтобы вычислить ток, протекающий во вращающуюся электрическую машину, на основании постоянного тока шины, необходимо подготавливать сигналы несущих трех фаз. При этом образе действий в традиционных технологиях, поскольку необходимо подготавливать сигналы несущих трех фаз, трудно использовать доступный для коммерческого приобретения микрокомпьютер общего применения, что приводит к невозможности использования недорогой конфигурации.
Дополнительно поскольку используются сигналы несущих трех фаз, когда выборка тока выполняется поблизости от пика и впадины каждого из сигналов несущих, возможен случай, где момент времени, когда выполняется дискретизация тока в одной фазе, совпадает с временными характеристиками переключения другой фазы, и, следовательно, дискретизация тока подвергается воздействию включения/выключения инвертора, которые могут вызывать нарушение в дискретизацию.
Дополнительно в способе оценки положения, раскрытом в патентном документе 2, оценка положения выполняется с использованием двух частей информации, то есть команды тока и тока детектирования, что приводит к проблеме увеличения арифметической обработки для вычисления положения оценки посредством обработки двух частей информации.
Краткое изложение существа изобретения
Настоящее изобретение предназначено для решения вышеприведенных проблем.
Задача настоящего изобретения состоит в том, чтобы предложить контроллер вращающейся электрической машины, причем контроллер, способный к точной оценке положения ротора и управлению вращающейся электрической машиной посредством детектирования информации о токе, протекающем во вращающуюся электрическую машину, с использованием всего лишь одиночного сигнала несущей и, в частности, без использования датчика положения ротора.
Дополнительно настоящее изобретение направлено на случай, где фаза вращающейся электрической машины, в которой протекает ток, определяется на основании постоянного тока шины. То есть еще одна задача настоящего изобретения состоит в том, чтобы обеспечить возможность вычисления тока, протекающего во вращающуюся электрическую машину, на основании постоянного тока шины, используя сигнал оценки положения, сформированный с использованием одиночного сигнала несущей, и простую конфигурацию, даже когда значения команд напряжения перекрываются или близки друг к другу, что не может быть достигнуто традиционными технологиями.
Контроллер вращающейся электрической машины согласно настоящему изобретению выполняет управление вращением вращающейся электрической машины и включает в себя: средство детектирования тока для детектирования токов вращающейся электрической машины, протекающих во вращающуюся электрическую машину; средство оценки положения для оценки положения ротора в соответствии с токами вращающейся электрической машины, детектированными средством детектирования тока; средство управления для выдачи команд напряжения в соответствии с положением ротора, оцененным средством оценки положения; средство широтно-импульсной модуляции для выдачи логических сигналов, которые подвергнуты широтно-импульсной модуляции, на основании команд напряжения от средства управления и цикла переключения, используемого для управления широтно-импульсной модуляцией; и средство приложения напряжения для приложения напряжений к вращающейся электрической машине в соответствии с логическими сигналами, выданными средством широтно-импульсной модуляции. Команды напряжения, выдаваемые средством управления, получаются наложением на напряжения основных гармоник для приведения в действие вращающейся электрической машины, напряжений детектирования положения, каждое из которых имеет цикл, равный m-кратному значению (m - целое число от трех или более) цикла переключения, и которые отличны по фазе между соответственных фаз.
В этом случае может быть применима конфигурация, в которой средство детектирования тока замещено средством детектирования тока шины для детектирования тока шины, протекающего между средством приложения напряжения и источником напряжения постоянного тока, подающим питание постоянного тока на средство приложения напряжения, и средством вычисления тока вращающейся электрической машины для вычисления токов вращающейся электрической машины, протекающих во вращающуюся электрическую машину, в соответствии с током шины, детектированным средством детектирования тока шины, и обоими или любыми из логических сигналов и команд напряжения.
В контроллере вращающейся электрической машины согласно настоящему изобретению команды напряжения, выдаваемые средством управления в средство широтно-импульсной модуляции, получают наложением на напряжения основных гармоник для приведения в действие вращающейся электрической машины, напряжений детектирования положения, каждое из которых имеет цикл, равный m-кратному значению (m - целое число от трех или более) цикла переключения, используемого для управления широтно-импульсной модуляцией, и которые отличны по фазе между соответственных фаз. Таким образом, когда напряжения переменного тока прикладываются для приведения в действие вращающейся электрической машины, токи вращающейся электрической машины, протекающие во вращающуюся электрическую машину, включают в себя переменные токи детектирования положения, имеющие частоту, соответствующую напряжениям детектирования положения. Поэтому токи вращающейся электрической машины детектируются средством детектирования тока, а переменные токи детектирования положения, включенные в токи вращающейся электрической машины, выделяются средством оценки положения, в силу чего может оцениваться положение ротора.
Соответственно посредством использования только лишь одиночного сигнала несущей и без особого использования датчика положения ротора можно точно оценивать положение ротора и управлять вращающейся электрической машиной, детектируя токи вращающейся электрической машины, протекающие во вращающуюся электрическую машину.
Дополнительно ток шины детектируется средством детектирования тока шины, и токи вращающейся электрической машины, протекающие во вращающуюся электрическую машину, вычисляются средством вычисления тока вращающейся электрической машины в соответствии с током шины и обоими или любыми из логических сигналов и команд напряжения, в силу чего можно уменьшать количество деталей средства детектирования тока, а также можно увеличить снижение затрат. Более того, одновременно напряжения трехфазного переменного тока, каждое из которых имеет цикл, равный m-кратному значению цикла переключения, и которые отличны по фазе, между соответственных фаз, используются в качестве напряжений детектирования положения, используемых для оценки положения, в силу чего можно вычислить токи, протекающие во вращающуюся электрическую машину, используя простую конфигурацию, и на основании постоянного тока шины, даже когда значения напряжений основных гармоник трех фаз для приведения в действие вращающейся электрической машины по существу идентичны друг другу (когда коэффициент модуляции мал или когда две фазы из трех фаз перекрываются друг с другом).
Цикл вычисления средством управления обычно устанавливается равным или кратным циклу переключения. Таким образом, когда цикл напряжений детектирования положения токов трехфазного переменного тока, используемых для оценки положения, не кратен циклу переключения, напряжения детектирования положения будут прерывистыми, а его среднее значение по времени не является нулевым, что вызывает формирование зыби. Однако в настоящем изобретении цикл напряжений детектирования положения у трехфазных переменных токов, используемых для оценки положения, устанавливается равным m-кратному значению (m - целое число от трех или более) цикла переключения, и, таким образом, напряжения детектирования положения изменяются непрерывно, и можно предотвращать формирование зыби.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 - изображает структурную схему, показывающую контроллер вращающейся электрической машины согласно первому варианту осуществления настоящего изобретения;
Фиг.2 - структурную схему, подробно показывающую средство оценки положения, предусмотренное в контроллере, показанном на фиг.1;
Фиг.3 - поясняющую диаграмму, иллюстрирующую работу в первом варианте осуществления;
Фиг.4 - поясняющую диаграмму, иллюстрирующую работу в первом варианте осуществления;
Фиг.5 - поясняющую диаграмму, иллюстрирующую работу в первом варианте осуществления;
Фиг.6 - поясняющую диаграмму, иллюстрирующую работу в первом варианте осуществления;
Фиг.7 - поясняющую диаграмму, иллюстрирующую работу в первом варианте осуществления;
Фиг.8 - структурную схему, подробно показывающую средство оценки положения, предусмотренное в контроллере, согласно второму варианту осуществления настоящего изобретения;
Фиг.9 - поясняющую диаграмму, иллюстрирующую работу средства оценки положения, показанного на фиг.8;
Фиг.10 - структурную схему, показывающую контроллер вращающейся электрической машины согласно третьему варианту осуществления настоящего изобретения;
Фиг.11 - структурную схему, показывающую контроллер вращающейся электрической машины согласно четвертому варианту осуществления настоящего изобретения;
Фиг.12 - поясняющую диаграмму, иллюстрирующую работу контроллера согласно пятому варианту осуществления настоящего изобретения;
Фиг.13 - структурную схему, показывающую контроллер вращающейся электрической машины согласно шестому варианту осуществления настоящего изобретения;
Фиг.14 - структурную схему, показывающую контроллер традиционной вращающейся электрической машины, причем контроллер вычисляет токи вращающейся электрической машины по постоянному току шины;
Фиг.15 - поясняющую диаграмму, иллюстрирующую работу контроллера вращающейся электрической машины, имеющей конфигурацию, показанную на фиг.14;
Фиг.16 - структурную схему, показывающую средство приложения напряжения контроллера вращающейся электрической машины, показанной на фиг.14;
Фиг.17 - структурную схему, показывающую контроллер еще одной традиционной вращающейся электрической машины, причем контроллер вычисляет токи вращающейся электрической машины по постоянному току шины;
Фиг.18 - поясняющую диаграмму, иллюстрирующую работу контроллера вращающейся электрической машины, имеющей конфигурацию, показанную на фиг.17;
Фиг.19 - поясняющую диаграмму, иллюстрирующую работу контроллера вращающейся электрической машины, имеющей конфигурацию, показанную на фиг.14 или фиг.17, в случае, где возникает проблема при вычислении токов вращающейся электрической машины на основании постоянного тока шины;
Фиг.20 - структурную схему, показывающую контроллер вращающейся электрической машины согласно седьмому варианту осуществления настоящего изобретения;
Фиг.21 - поясняющую диаграмму, иллюстрирующую работу контроллера вращающейся электрической машины, показанного на фиг.20;
Фиг.22 - поясняющую диаграмму, иллюстрирующую работу контроллера согласно восьмому варианту осуществления настоящего изобретения;
Фиг.23 - поясняющую диаграмму, иллюстрирующую работу в восьмом варианте осуществления настоящего изобретения;
Фиг.24 - структурную схему, показывающую контроллер вращающейся электрической машины согласно девятому варианту осуществления настоящего изобретения;
Фиг.25 - поясняющую диаграмму, иллюстрирующую работу контроллера вращающейся электрической машины, имеющей конфигурацию, показанную на фиг.24.
Описание предпочтительных вариантов осуществления изобретения
Первый вариант осуществления
На фиг.1-7 показан первый вариант осуществления настоящего изобретения. Фиг.1 изображает структурную схему, показывающую общую конфигурацию контроллера вращающейся электрической машины, фиг.2 изображает структурную схему, подробно показывающую средство оценки положения, показанное на фиг.1, и фиг.3 по фиг.7 каждая является поясняющей схемой для разъяснения работы.
В первом варианте осуществления вращающаяся электрическая машина 1, например, является машиной синхронного типа с внутренними постоянными магнитами, и к вращающейся электрической машине 1 подключен инвертор 6 в качестве средства приложения напряжения, который прикладывает к ней предопределенное напряжение управления. В дополнение скомпоновано средство 2 детектирования тока, которое детектирует токи iu и iv вращающейся электрической машины двух фаз, протекающие между инвертором 6 и вращающейся электрической машиной 1, средство 3 оценки положения, которое вычисляет положение ротора вращающейся электрической машины 1, средство 4 управления (будет подробно описано позже), которое выдает команды Vup*, Vvp* и Vwp* напряжения, которые являются командами напряжения приведения в действие, которые должны прикладываться к вращающейся электрической машине 1, средство 5 управления широтно-импульсной модуляцией (будет подробно описано позже), которое выдает логические сигналы Vu1, Vv1 и Vw1, которые подвергнуты широтно-импульсной модуляции в соответствии с командами Vup*, Vvp* и Vwp* напряжения, выдаваемыми из средства 4 управления.
Средство 4 управления включает в себя вычитатель 42, регулятор 7 тока оси d, регулятор 8 тока оси q, преобразователь 9 координат, двухфазный/трехфазный конвертер 10 в качестве средства команд напряжения, трехфазный/двухфазный конвертер 11 и преобразователь 12 координат. Средство 4 управления также включает в себя генератор 14 напряжения детектирования положения и сумматор 41. Дополнительно, средство 5 широтно-импульсной модуляции включает в себя генератор 13 цикла переключения в качестве секции формирования цикла переключения и контроллер 15 широтно-импульсной модуляции.
Средство 2 детектирования тока согласно первому варианту осуществления, например, является трансформатором или тому подобным и детектирует токи двух фаз, то есть ток iu фазы U и ток iv фазы V, с линии питания, осуществляющей соединение между вращающейся электрической машиной 1 и инвертором 6. Однако в качестве альтернативы могут детектироваться любые токи двух фаз среди тока фазы U, тока фазы V и тока фазы W. В качестве еще одной альтернативы средство 2 детектирования тока может детектировать токи трех фаз, то есть ток фазы U, ток фазы V и ток фазы W. Кроме того, еще, альтернативно, в качестве средства 2 детектирования тока, способ, использующий постоянный ток шины, выдаваемый в инвертор 6, который будет описан позже, может использоваться для вычисления и детектирования токов.
Как более подробно описано позже, напряжения Vuh, Vvh и Vwh детектирования положения трех фаз, выдаваемые генератором 14 напряжения детектирования положения, накладываются на напряжения Vup*, Vvp* и Vwp* основных гармоник для приведения в действие вращающейся электрической машины, и, следовательно, токи вращающейся электрической машины двух фаз, то есть ток iu фазы U и ток iv фазы V вращающейся электрической машины 1, детектированные средством 2 детектирования тока, включают в себя составляющие переменного тока детектирования положения, которые имеют частоты, соответствующие напряжениям Vuh, Vvh и Vwh детектирования положения.
Соответственно средство 3 оценки положения выделяет высокочастотные переменные токи детектирования положения, которые формируются во вращающейся электрической машине 1 и заключены в токах вращающейся электрической машины, и получает и выдает, на основании токов детектирования положения, информацию θp о положении ротора. Как показано на фиг.2, средство 3 оценки положения сконфигурировано так, чтобы трехфазный/двухфазный конвертер 19, преобразователи 20 Фурье, два умножителя 21, вычитатель 22 и блок 23 вычисления положения были соединены последовательно. Отмечено, что трехфазный/двухфазный конвертер 19 скомпонован, так как преобразование в двухфазные токи уменьшает количество информации, требуемой для оценки положения, выполняемой на последующих этапах, что приводит к простому вычислению. В дополнение преобразователь 20 Фурье сконструирован, чтобы выделять переменные токи детектирования положения, включенные в токи вращающейся электрической машины.
Контроллер 7 тока оси d использует пропорционально-интегральное регулирование или тому подобное для устранения отклонения Δid между значением id* команды тока оси d и id, выдаваемым из преобразователя 12 координат, причем отклонение Δid получается из вычитателя 42, тем самым выдавая напряжение Vd* основных гармоник оси d. Контроллер 8 тока оси q использует пропорционально-интегральное регулирование или тому подобное для устранения отклонения Δiq между значением iq* команды тока оси q и iq, выдаваемым из преобразователя 12 координат, причем отклонение Δiq получается из вычитателя 42, тем самым выдавая напряжение Vq* основных гармоник оси q. Преобразователь 9 координат использует информацию о положении ротора, выдаваемую средством 3 оценки положения, с тем чтобы преобразовывать напряжение Vd* основных гармоник оси d и напряжение Vq* основных гармоник оси q в напряжения Vα* и Vβ* основных гармоник на двух неподвижных осях (осях α-β). В дополнение двухфазный/трехфазный конвертер 10 преобразует напряжения α* и Vβ* основных гармоник в напряжения Vu*, Vv* и Vw* основных гармоник трех фаз, каждое в форме синусоидального колебания или тому подобного.
С другой стороны, трехфазный/двухфазный конвертер 11 преобразует ток iu фазы U и ток iv фазы V, которые детектируются средством 2 детектирования тока, в токи iα и iβ по двум неподвижным осям (осям α-β). В дополнение преобразователь 12 координат использует информацию θp о положении ротора, выдаваемую средством 3 оценки положения, для преобразования iα и iβ в токи id и iq по двум вращающимся осям (осям d-q).
Генератор 13 цикла переключения выдает значение цикла Tc переключения в контроллер 15 широтно-импульсной модуляции и генератор 14 напряжения детектирования положения. Отмечено, что цикл Tc переключения имеет значительно более короткий цикл, чем циклы напряжений Vu*, Vv* и Vw* основных гармоник трех фаз, и цикл Tc переключения заблаговременно устанавливается в оптимальное значение, принимая во внимание электрические характеристики вращающейся электрической машины 1, частоту электромагнитного шума, формируемого вследствие приведения в действие инвертора, и тому подобное.
Генератор 14 напряжения детектирования положения формирует напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет цикл m·Tc, который равен m-кратному значению (m - целое число от трех или более, а причина «трех или более» будет описана позже) цикла Tc переключения, выдаваемого из генератора 13 цикла переключения, и которые отличны по фазе друг от друга, с тем чтобы выдаваться в сумматор 41.
Сумматор 41 накладывает напряжения Vuh, Vvh и Vwh детектирования положения на высоких частотах (цикл m·Tc), которые выдаются из генератора 14 напряжения детектирования положения, на напряжения Vu*, Vv* и Vw* основных гармоник, которые выдаются из двухфазного/трехфазного конвертера 10, и выдает команды Vup*, Vvp* и Vwp* напряжения, в качестве результирующих величин, в контроллер 15 широтно-импульсной модуляции. Здесь причина, почему m является целым числом от трех или более, состоит в том, что, когда m имеет значение 1 или 2, напряжения Vuh, Vvh и Vwh детектирования положения трех фаз, каждое из которых имеет цикл, равный циклу m·Tc, то есть m-кратному значению цикла Tc переключения, не являются отличающимися по фазе друг от друга, и, следовательно, невозможно точно получать информацию θp о положении ротора, используя средство 3 оценки положения.
В вышеприведенной конфигурации сумматор 41 средства 4 управления накладывает напряжения Vuh, Vvh и Vwh детектирования положения на напряжения Vu*, Vv* и Vw* основных гармоник трех фаз, соответственно и по отдельности, и прикладывает результирующие величины к вращающейся электрической машине 1. В этом случае вектор напряжения, который является векторной суммой напряжений Vuh, Vvh и Vwh детектирования положения, представляет вращающееся напряжение вместо переменного напряжения. Переменное напряжение является напряжением, показывающим векторы напряжения в двух или менее направлениях во время цикла напряжений трехфазного переменного тока, при этом прикладываются векторы напряжения, являющиеся суммой векторов в соответственных фазах напряжений трехфазного тока. С другой стороны, вращающееся напряжение является напряжением, показывающим векторы напряжения в трех или более направлениях во время цикла напряжений трехфазного переменного тока, при этом прикладываются векторы напряжения, являющиеся суммой векторов в соответственных фазах напряжений трехфазного переменного тока.
В качестве примеров напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых генератором 14 напряжения детектирования положения, его формы волны напряжения, в случае m=4, показаны на фиг.3(a), где используются цикл Tc переключения и цикл Thv (=4·Tc) напряжения детектирования положения. Дополнительно векторная диаграмма вектора Vsum напряжения, который является векторной суммой напряжений Vuh, Vvh и Vwh детектирования положения, показана на фиг.3(b). На фиг.3(a) +Vh и -Vh, каждое из которых имеет произвольное значение, попеременно выдаются в каждые два интервала, а разностью фаз между соответственными фазами является один интервал. В этом случае вектор Vsum напряжения, который является векторной суммой напряжений Vuh, Vvh и Vwh детектирования положения, представляет вращающееся напряжение, которое показывает с Vsum1 по Vsum4 в этом порядке в интервалах с K1 по K4 (фиг.3(a)), соответственно в течение одного цикла напряжения трехфазного переменного тока, как показано на фиг.3(b).
Отмечено, что количество интервалов, в которых каждое из напряжений Vuh, Vvh и Vwh детектирования положения является +Vh или -Vh, необязательно должно быть двумя интервалами, а может быть одним интервалом. В качестве альтернативы, как показано на фиг.4, количество интервалов может быть тремя интервалами. Однако когда выдаются напряжения трехфазного переменного тока, каждое из которых имеет цикл, который является m-кратным значением цикла переключения и которые отличны по фазе друг от друга, количества интервалов +Vh или -Vh должно быть в диапазоне от 1 до (m-1), и в дополнение сумма количества интервалов +Vh и -Vh должна быть m интервалами. Дополнительно, разность фаз между соответственными фазами не должна обязательно быть одним интервалом, как показано на фиг.3(a), а может быть двумя интервалами, тремя интервалами или тому подобным. Однако когда выдаются напряжения трехфазного переменного тока, каждое из которых имеет цикл, который является m-кратным значением цикла переключения, и которые отличны по фазе друг от друга, разность фаз и фаз между соответственными фазами должна быть в диапазоне от 1 до (m-1). Дополнительно напряжения Vuh, Vvh и Vwh детектирования положения не обязательно должны быть представлены прямоугольными волнами, которые показаны на фиг.3 и фиг.4, но могут быть представлены синусоидальными волнами.
Используя команды Vup*, Vvp* и Vwp* напряжения, выданные средством 4 управления, и значение цикла Tc переключения, выданное генератором 13 цикла переключения, контроллер 15 широтно-импульсной модуляции формирует логические сигналы Vu1, Vv1 и Vw1, которые подвергнуты широтно-импульсной модуляции и которые подаются на инвертор 6. В качестве способа управления широтно-импульсной модуляцией может использоваться любой из следующих способов, то есть (a) способ управления широтно-импульсной модуляцией, использующий треугольную волну Cs в качестве сигнала несущей, (b) способ управления широтно-импульсной модуляцией, использующий пилообразную волну Wst в качестве сигнала несущей, и (c) способ управления широтно-импульсной модуляцией, использующий пространственный вектор Vs мгновенного напряжения.
Сначала будет описан способ управления широтно-импульсной модуляцией, использующий треугольную волну Cs. На фиг.5 показана форма волны сигнала операции широтно-импульсной модуляции в случае, где применяется способ управления широтно-импульсной модуляцией, использующий треугольную волну Cs. В способе управления широтно-импульсной модуляцией, использующем треугольную волну Cs, цикл Tcs треугольной волны Cs устанавливается в двухкратное значение (то есть Tcs=2Tc) цикла Tc переключения, выдаваемого генератором 13 цикла переключения.
Операция широтно-импульсной модуляции, выполняемая контроллером 15 широтно-импульсной модуляции, ниже описана более подробно. Отмечено, что на фиг.5, хотя команды Vup*, Vvp* и Vwp* напряжения являются синусоидальными волновыми сигналами, команды напряжения представлены линейно, поскольку частоты команд напряжения являются более низкими по сравнению с сигналом несущей треугольной формы волны Cs или напряжениями Vuh, Vvh и Vwh детектирования положения. Дополнительно, хотя напряжения Vuh, Vvh и Vwh детектирования положения накладываются на команды Vup*, Vvp* и Vwp* напряжения, фактически, наложенные напряжения исключены из чертежа, поскольку операция широтно-импульсной модуляции будет пояснена в материалах настоящей заявки.
Как показано на фиг.5, получается отношение амплитуд между треугольной волной Cs и каждой из команд Vup*, Vvp* и Vwp* напряжения. Когда амплитуда каждой из команд Vup*, Vvp* и Vwp* напряжения больше, чем амплитуда треугольной волны Cs, тогда выдается высокий (Hi) логический сигнал. С другой стороны, когда амплитуда каждой из команд напряжения меньше, выдается низкий (Low) логический сигнал. Он может устанавливаться из условия, чтобы при сравнении амплитуды между треугольной волной Cs и каждой из команд Vup*, Vvp* и Vwp* напряжения, когда амплитуда каждой из команд Vup*, Vvp* и Vwp* напряжения больше, чем амплитуда треугольной волны Cs, тогда выдается низкий логический сигнал, тогда как, когда амплитуда каждой из команд напряжения меньше, тогда выдается высокий логический сигнал.
Затем будет описан способ управления широтно-импульсной модуляцией, использующий пилообразную волну Wst. На фиг.6 показана форма волны сигнала операции широтно-импульсной модуляции в случае, когда в способе управления широтно-импульсной модуляцией используется пилообразная волна Wst. В способе управления широтно-импульсной модуляцией, использующем пилообразную волну Wst, цикл Twst пилообразной волны Wst является таким же, как цикл Tc переключения, выдаваемый генератором 13 цикла переключения.
На фиг.6 операция широтно-импульсной модуляции показана более точно. Как показано на фиг.6, получается отношение амплитуд между пилообразной волной Wst и каждой из команд Vup*, Vvp* и Vwp* напряжения. Когда амплитуда каждой из команд Vup*, Vvp* и Vwp* напряжения больше, чем амплитуда пилообразной волны Wst, выдается высокий логический сигнал, тогда как, когда амплитуда каждой из команд напряжения меньше, выдается низкий логический сигнал. Он может устанавливаться из условия, чтобы при сравнении амплитуды между пилообразной волной Wst и каждой из команд Vup*, Vvp* и Vwp* напряжения, когда амплитуда команд Vup*, Vvp* и Vwp* напряжения больше, чем амплитуда пилообразной волны Wst, выдается низкий логический сигнал, тогда как, когда команды напряжения меньше, выдается высокий логический сигнал.
Далее будет описан способ управления широтно-импульсной модуляцией, использующий пространственный вектор Vs мгновенного напряжения. В способе управления широтно-импульсной модуляцией векторная сумма команд Vup*, Vvp* и Vwp* напряжения, выдаваемых средством 4 управления, устанавливается в качестве пространственного вектора Vs мгновенного напряжения, и логические сигналы Vu1, Vv1 и Vw1 разделяются по времени и комбинируются в пределах произвольного заданного интервала Tf времени, так, что их модуль и направление совпадают с модулем и направлением пространственного вектора Vs мгновенного напряжения, в силу чего средняя величина векторной суммы логических сигналов в пределах произвольного заданного интервала Tf времени регулируется, с тем чтобы совпадать с пространственным вектором Vs мгновенного напряжения. В настоящем варианте осуществления произвольный заданный интервал Tf времени является таким же, как цикл Tc переключения, выдаваемый генератором 13 цикла переключения.
На фиг.7, операция широтно-импульсной модуляции будет показана более точно. На фиг.7 показана схема, иллюстрирующая работу способа управления с пространственным вектором мгновенного напряжения. На фиг.7(a) показана диаграмма комбинации логических сигналов, выдаваемых контроллером 15 широтно-импульсной модуляции, а на фиг.7(b) показана диаграмма восьми векторов напряжения, полученных комбинированием логических сигналов, показанных на фиг.7(a). Каждый из векторов V0 и вектор V7 указан в качестве вектора нулевого напряжения, поскольку вектор V0 и вектор V7 представляют Low (низкий уровень) и Hi (высокий уровень) на всех своих ключах соответственно и, таким образом, векторы не имеют модуля или направления. Например, как показано на фиг.7(c), предположим случай, где предусмотрен пространственный вектор Vs мгновенного напряжения, который является векторной суммой команд Vup*, Vvp* и Vwp* напряжения, выдаваемых средством 4 управления, и пространственный вектор Vs мгновенного напряжения выдается в течение произвольного заданного периода Tf времени. Пространственный вектор Vs мгновенного напряжения может быть разделен на направление вектора V1 и направление вектора V2, и модуль пространственного вектора Vs мгновенного напряжения, выделенный в направлении вектора V1, рассматривается в качестве V1s, а модуль, который выделен в направлении вектора V2, рассматривается в качестве V2s.
На основании V1s и V2s момент T1 времени вывода вектора V1 и момент T2 времени вывода вектора V2 в течение произвольного заданного интервала Tf времени вычисляются с использованием формул (1) и (2), описанных ниже.
T1=V1s÷V1×Tf (1)
T2=V2s÷V2×Tf (2)
Дополнительный момент T3 времени вывода вектора нулевого напряжения во время произвольного заданного интервала Tf времени вычисляется с использованием формулы (3), описанной ниже.
T3=Tf-T1-T2 (3)
Как описано выше, рассчитываются времена T1, T2 и T3 вывода, и на основании соответственных моментов с T1 по T3 времени вывода комбинации логических сигналов вектора V1, вектора V2 и вектора V0 или V7 выдаются из контроллера 15 широтно-импульсной модуляции, как показано на фиг.7(d). Соответственно средняя величина в моменты времени вывода в течение произвольного заданного интервала Tf времени устанавливается, чтобы совпадать с пространственным вектором Vs мгновенного напряжения.
Когда выдается вектор нулевого напряжения, могут использоваться комбинации логических сигналов обоих, вектора V0 и вектора V7. Однако когда соответственные фазные напряжения наблюдаются из нейтральной точки вращающейся электрической машины 1, может использоваться любой из вектора V0 и вектора V7, потенциалы соответственных фазных напряжений вращающейся электрической машины 1 равны друг другу и не показывают никакой разницы. Таким образом, необязательно использовать оба из вектора V0 и вектора V7, а может использоваться комбинация логических сигналов только одного из них.
Далее будет описана работа средства 3 оценки положения. Трехфазный/двухфазный конвертер 19 (фиг.2) преобразует токи iu и iv вращающейся электрической машины, которые детектированы средством 2 детектирования тока, в двухфазные токи iαs и iβs в системе осей α-β. Как описано выше, напряжения Vuh, Vvh и Vwh детектирования положения, которые являются более высокочастотными напряжениями, чем напряжения основных гармоник, накладываются на трехфазные напряжения Vu*, Vv* и Vw* основных гармоник и соответственно высокочастотные переменные токи детектирования положения, соответствующие напряжениям Vuh, Vvh, Vwh детектирования положения, формируются в токах вращающейся электрической машины, детектированных средством 2 детектирования тока. Поэтому преобразователи 20 Фурье, скомпонованные впоследствии, выделяют амплитуды (модули) Iαs и Iβs переменных токов детектирования положения из двухфазных токов iαs и iβs, которые выдаются из трехфазного/двухфазного конвертера 19. Впоследствии, ради простой вычислительной обработки, умножители 21 возводят в квадрат Iαs и Iβs, которые выдаются из преобразователей 20 Фурье соответственно, а затем выдают (Iαs·Iαs) и (Iβs·Iβs). Затем вычитатель 22 выдает разность ΔIαβ между ними, вычитая (Iαs·Iαs) из (Iβs·Iβs). Блок 23 вычисления положения затем вычисляет положение θp ротора на основании разности Δiαβ, которая является выходным сигналом вычитателя 22.
Положение θp ротора, полученное, как приведено выше, не основано на прямом детектировании положения с использованием датчика или тому подобного, а основано на значении оценки, полученном посредством вычисления. То есть получение положения θp ротора в настоящем изобретении показывает, что можно оценивать точное положение ротора бессенсорным образом. В дальнейшем подробности обработки получения положения θp ротора средством 3 оценки положения будут описаны дополнительно более конкретно.
В случае, где вращающаяся электрическая машина 1 является синхронной машиной с внутренними постоянными магнитами, уравнение напряжений в неподвижных прямоугольных координатах (осях a-β) может быть выражено в качестве формулы (4), описанной ниже.

где
 : значение напряжения в неподвижных прямоугольных координатах
: значение напряжения в неподвижных прямоугольных координатах
 : значение напряжения в неподвижных прямоугольных координатах (двухфазные токи)
: значение напряжения в неподвижных прямоугольных координатах (двухфазные токи)
R: сопротивление статора, P: оператор дифференциирования
Ld: индуктивность оси d, Lq: индуктивность оси q
ω: угловая скорость вращения (электрический угол)
θ: разность фаз между осью α и магнитным полюсом

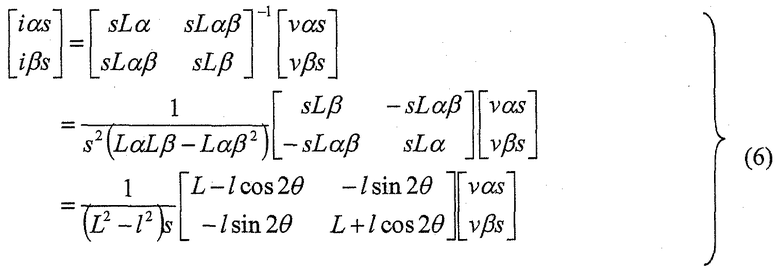
Предположим, что вращающаяся электрическая машина 1 находится в остановленном состоянии или в состоянии работы с низкой частотой вращения. Когда ω установлена, чтобы удовлетворять ω=0, и оператор дифференциирования P заменен оператором s Лапласа, токи iαs и iβs в неподвижных прямоугольных координатах выражаются формулой (5), приведенной ниже.

Здесь, когда напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет угловую частоту ωh, которая значительно выше, чем угловая частота напряжений переменного тока для приведения в действие вращающейся электрической машины 1, прикладываются из генератора 14 напряжения детектирования положения, удовлетворены R<<Lα·ωh и R<<Lβ·ωh (в отношении s=jωh (j - мнимая единица)). Когда влиянием сопротивления R статора пренебрегают, формула (5) выражается формулой (6), приведенной ниже.
Дополнительно напряжения Vuh, Vvh и Vwh детектирования положения, прикладываемые генератором 14 напряжения детектирования положения, могут быть выражены формулой (7), приведенной ниже, в неподвижных прямоугольных координатах.

где  : значения напряжения детектирования положения в постоянных прямоугольных координатах
: значения напряжения детектирования положения в постоянных прямоугольных координатах
 : амплитуда напряжений детектирования положения в постоянных прямоугольных координатах
: амплитуда напряжений детектирования положения в постоянных прямоугольных координатах
 : угловая частота напряжений детектирования положения
: угловая частота напряжений детектирования положения
Значения напряжения детектирования положения в формуле (7) в неподвижных прямоугольных координатах выражаются в качестве формулы (8), приведенной ниже.

Поэтому, когда значения напряжений детектирования положения в формуле (8) заменяются на [Vαs Vβs], в формуле (6), в неподвижной прямоугольной системе координат, и когда применяется s=jωh (j - мнимая единица), формула (9) может быть получена, как изложено ниже.
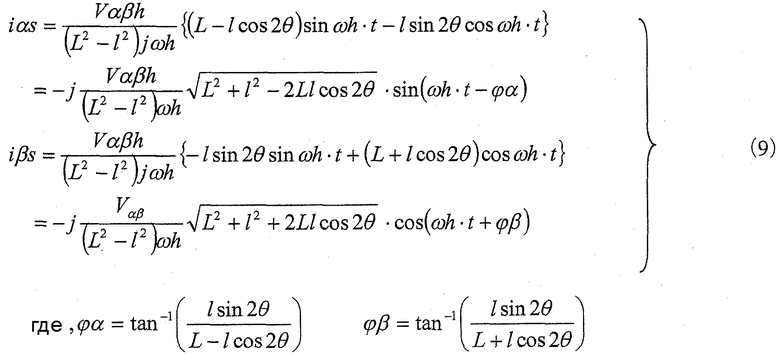
Как показано в формуле (9), амплитуды токов iαs и iβs в неподвижных прямоугольных координатах включают в себя информацию θ (= θp положения ротора) о положении ротора. Поэтому посредством использования преобразователей 20 Фурье выделяются амплитуды Iαs и Iβs токов iαs и iβs в неподвижных прямоугольных координатах. То есть посредством использования преобразователей 20 Фурье токи iαs и iβs высокой частоты, которые вызваны напряжениями Vuh, Vvh и Vwh детектирования положения, выделяются из токов вращающейся электрической машины, и получаются их амплитуды Iαs и Iβs. На основании выделенных амплитуд Iαs и Iβs выполняется вычисление с использованием следующей формулы (10). Соответственно можно получить выражение, которое включает в себя только информацию θ о положении ротора. Для осуществления вычисления умножители 21 используются для возведения в квадрат амплитуд Iαs и Iβs соответственно, и вычитатель 22 используется для вычитания (Iαs·Iαs) из (Iβs·Iβs), которые являются выходными сигналами из умножителей 21, и для вывода Δiαβ, которая включает в себя информацию о положении θ ротора.
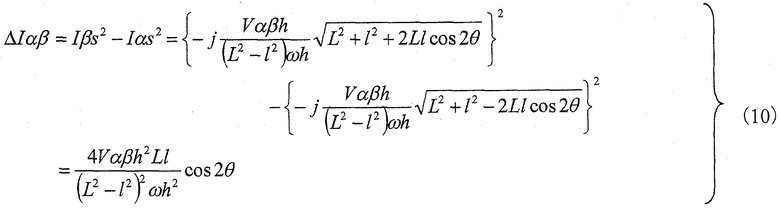
В блоке 23 вычисления положения Δiαβ в формуле (10) делится на формулу (11), приведенную ниже, тем самым выделяется только cos2θ. Посредством вычисления арккосинуса от cos2θ получается θ (положение θp ротора). В отношении вычисления положения θp ротора оно может быть получено не посредством использования операции арккосинуса, а посредством подготовки таблицы, содержащей хранимые в ней значения cos2θ, и посредством использования значений cos2θ, хранимых на запоминающем устройстве.

Как описано выше, в первом варианте осуществления, на основании цикла Tc переключения, напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет цикл m·Tc, который является m-кратным значением (m - целое число от трех или более) цикла Tc переключения, и которые отличны по фазе друг от друга, накладываются на напряжения Vu*, Vv* и Vw* основных гармоник, и результирующие величины выдаются. Таким образом, в отличие от традиционного уровня техники не обязательно формировать сигналы несущей трех фаз, а можно легко выдавать напряжения детектирования положения (команды напряжения детектирования положения). В дополнение, поскольку положение ротора может быть получено посредством использования только токов вращающейся электрической машины, можно оценивать положение ротора вращающейся электрической машины 1 с помощью простой конфигурации, и также можно упрощать вычисления, что ведет к уменьшению вычислительной сложности. Дополнительно, даже когда выборка тока выполняется поблизости от пика или впадины сигнала несущей треугольной волны, пилообразной волны или тому подобного, не обязательно формировать сигналы трех фаз. Поэтому можно выполнять выборку тока наряду с уменьшением влияния коммутационных помех или тому подобного, вызванных переключением инвертора.
Второй вариант осуществления
На фиг.8 показана структурная схема, показывающая средство оценки положения в контроллере вращающейся электрической машины согласно второму варианту осуществления настоящего изобретения.
В средстве 3 оценки положения по первому варианту осуществления положение θp ротора вычисляется посредством использования операции арккосинуса или посредством подготовки таблицы, содержащей значение cos2θ, хранимое в ней, и посредством использования этого значения. Однако в таких способах может быть возможность увеличения вычислительной сложности. Таким образом, во втором варианте осуществления вычислительная сложность уменьшается по сравнению с первым вариантом осуществления, и положение θp ротора получается просто.
На фиг.8 средство 3 оценки положения включает в себя три схемы: то есть первую схему, включающую в себя трехфазный/двухфазный конвертер 24, преобразователи 20 Фурье, умножители 21 и вычитатель 22; вторую схему, включающую в себя трехфазный/двухфазный конвертер 25, преобразователи 20 Фурье, умножители 21 и вычитатель 22; и третью схему, включающую в себя трехфазный/двухфазный конвертер 26, преобразователи 20 Фурье, умножители 21 и вычитатель 22. Выходной сигнал каждого из вычитателей 22 выдается в блок 27 вычисления положения.
Трехфазный/двухфазный конвертер 24 в первой схеме выполняет трехфазное/двухфазное преобразование, так что направление фазы U статора совпадает с направлениями двухфазных токов после преобразования и выдает двухфазные токи iαsu и iβsu. Трехфазный/двухфазный конвертер 25 во второй схеме выполняет трехфазное/двухфазное преобразование, так что направление фазы V статора совпадает с направлениями двухфазных токов после преобразования и выдает двухфазные токи iαsv и iβsv. Трехфазный/двухфазный конвертер 26 в третьей схеме выполняет трехфазное/двухфазное преобразование, так что направление фазы W статора совпадает с направлениями двухфазных токов после преобразования и выдает двухфазные токи iαsw и iβsw.
Подобным первому варианту осуществления образом, амплитуда выделяется из каждого из двухфазных токов, выдаваемых из трехфазных/двухфазных конвертеров 24, 25 и 26, посредством преобразователя 20 Фурье и возводится в квадрат умножителем 21. Затем посредством использования вычитателя 22 квадрат амплитуды каждого тока α вычитается из квадрата амплитуды каждого тока β, тем самым получаются разности ΔIαβu, ΔIαβv и ΔIαβw. В этом случае соответственные разности ΔIαβu, ΔIαβv и Δiαβw выражаются в качестве формулы (12), приведенной ниже.
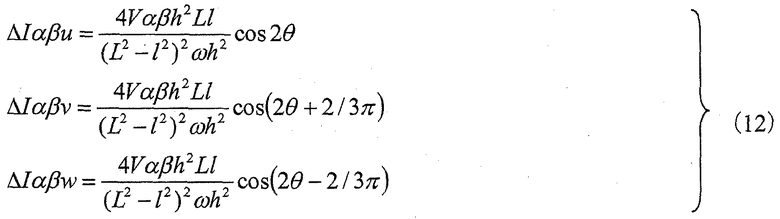
где направление фазы U статора удовлетворяет θ=0.
Согласно отношению амплитуд между ΔIαβu, ΔIαβv и Δiαβw блок 27 вычисления положения формирует интервалы с I по VI, как показано на фиг.9. В каждом интервале одна из ΔIαβu, ΔIαβv и Δiαβw, которая пересекает нулевую точку, аппроксимируется, используя линейную аппроксимацию, и положение θp ротора получается с использованием формулы (13), приведенной ниже. Δiαβ_uvw в формуле (13) является значением, у ΔIαβu, ΔIαβv и Δiαβw, которое пересекает нулевую точку, а |ΔIαβ_uvw| представляет амплитуду одной из ΔIαβu, ΔIαβv и Δiαβw, которая пересекает нулевую точку. Отмечено, что |ΔIαβ_uvw| может быть получена из квадратного корня суммы соответственных квадратов ΔIαβu, ΔIαββv и Δiαβw.

С вышеприведенной конфигурацией можно просто получать положение θp ротора, не выполняя операцию арккосинуса и не используя таблицу, содержащую хранимое в ней значение косинуса, которые выполняются в первом варианте осуществления, и к тому же можно уменьшать вычислительную сложность. Другие конфигурации, а также операции и результаты подобны таковым по первому варианту осуществления, и поэтому в материалах настоящей заявки их подробности будут опущены.
Третий вариант осуществления
На фиг.10 показана структурная схема, показывающая конфигурацию контроллера вращающейся электрической машины согласно третьему варианту осуществления. Те составные части, которые соответствуют составным частям первого варианта осуществления, снабжены идентичными условными обозначениями.
В третьем варианте осуществления контроллер вращающейся электрической машины включает в себя средство 16 ввода постоянной вращающейся электрической машины, которое вводит постоянную вращающейся электрической машины 1 (например, значение индуктивности или тому подобное вращающейся электрической машины 1). На основании постоянной вращающейся электрической машины, полученной из средства 16 ввода постоянной вращающейся электрической машины, генератор 14 напряжения детектирования положения средства 4 управления определяет напряжения Vuh, Vvh и Vwh детектирования положения трех фаз, каждое из которых имеет цикл (= m·Tc1), который равен m-кратному значению (m - целое число от трех или более) цикла Tc1 переключения и которые отличны по фазе друг от друга.
То есть в третьем варианте осуществления постоянная вращающейся электрической машины вводится из средства 16 ввода постоянной вращающейся электрической машины в генератор 13 цикла переключения и в генератор 14 напряжения детектирования положения. На основании введенной постоянной вращающейся электрической машины генератор 13 цикла переключения определяет оптимальный цикл Tc1 переключения, с тем чтобы выводиться в контроллер 15 широтно-импульсной модуляции и в генератор 14 напряжения детектирования положения.
С другой стороны, на основании введенной постоянной вращающейся электрической машины генератор 14 напряжения детектирования положения определяет оптимальный множитель m, вычисляет произведение между циклом Tc1 переключения, выданным генератором 13 цикла переключения, и множителем m, и выдает напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет цикл m·Tc1, и которые отличны по фазе друг от друга. Напряжения Vuh, Vvh и Vwh детектирования положения накладываются посредством сумматора 41 на напряжения Vu*, Vv* и Vw* основных гармоник и, как результат, команды Vup*, Vvp* и Vwp* напряжения подаются в контроллер 15 широтно-импульсной модуляции. Таким же образом, как первый вариант осуществления, контроллер 15 широтно-импульсной модуляции использует способ широтно-импульсного управления на основании цикла Tc1 переключения и выдает логические сигналы Vu1, Vv1 и Vw1 в инвертор 6.
Амплитуда (модуль) высокочастотных токов, заключенных в токах вращающейся электрической машины, задетектированных во вращающейся электрической машине 1, меняется в зависимости от напряжений Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет цикл, равный m-кратному значению (= m·Tc) цикла Tc переключения и которые отличны по фазе друг от друга. Таким образом, с характеристиками вращающейся электрической машины 1, являющимися игнорируемыми, когда m и Tc являются всегда постоянными значениями, возможен случай, когда амплитуды (модуль) высокочастотных токов, сформированных во вращающейся электрической машине 1, уменьшаются вследствие приложения напряжений Vuh, Vvh и Vwh детектирования положения и, как результат, точность высокочастотных токов, детектированных средством 2 детектирования тока, ухудшается, что приводит к ухудшению точности оценки положения ротора.
С другой стороны, в третьем варианте осуществления на основании постоянной вращающейся электрической машины постоянная зависит от типа вращающейся электрической машины 1, рассчитывается надлежащее значение, по меньшей мере, одного из множителя m или цикла Tc переключения, и цикл напряжений Vuh, Vvh и Vwh детектирования положения, которые отличны по фазе друг от друга, определяется из условия, что цикл был равным m-кратным значениям цикла Tc переключения. Поэтому даже когда приводится в действие вращающаяся электрическая машина 1, имеющая другую постоянную вращающейся электрической машины, контроллер способен к точной оценке положения ротора вращающейся электрической машины 1.
Поскольку другие конфигурации, а также операции и результаты настоящего варианта осуществления подобны таковым по первому варианту осуществления, их подробное описание в материалах настоящей заявки будет опущено.
Четвертый вариант осуществления
На фиг.11 показана структурная схема, показывающая конфигурацию контроллера вращающейся электрической машины согласно четвертому варианту осуществления. Те составные части, которые соответствуют составным частям первого варианта осуществления, снабжены идентичными условными обозначениями.
В четвертом варианте осуществления контроллер вращающейся электрической машины включает в себя средство 17 ввода цикла напряжения детектирования положения. В средстве 17 ввода цикла напряжения детектирования положения цикл или частота напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемые генератором 14 напряжения детектирования положения, устанавливаются и выдаются, с тем чтобы изменять любые из цикла или частоты. Соответственно в генераторе 14 напряжения детектирования положения определяется множитель m (m - целое число от трех или более) цикла Tc переключения, установленный генератором 13 цикла переключения.
А именно в четвертом варианте осуществления средство 17 ввода цикла напряжения детектирования положения определяет любое из цикла или частоты напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых генератором 14 напряжения детектирования положения. Например, когда пользователь вводит произвольный цикл в средство 17 ввода цикла напряжения детектирования положения, генератор 14 напряжения детектирования положения определяет, на основании цикла, полученного из средства 17 ввода цикла напряжения детектирования положения, множитель m (m - целое число от трех или более), на который умножается цикл Tc переключения для задания цикла напряжений Vuh, Vvh и Vwh детектирования положения. Дополнительно, когда пользователь вводит произвольную частоту в средство 17 ввода цикла напряжения детектирования положения, генератор 14 напряжения детектирования положения вычисляет обратную величину частоты, полученной из средства 17 ввода цикла напряжения детектирования положения, с тем чтобы получить цикл напряжений детектирования положения, и определяет, на основании полученного цикла, множитель m (m - целое число от трех или более), на который цикл Tc переключения умножается для задания цикла напряжений Vuh, Vvh и Vwh детектирования положения.
Таким образом, в четвертом варианте осуществления при компоновке средства 17 ввода цикла напряжения детектирования положения, цикл или частота соответственных напряжений Vuh, Vvh и Vwh детектирования положения, прикладываемых к вращающейся электрической машине 1, могут изменяться произвольно и, таким образом, можно изменять частоту формируемого шума, тем самым снижая некомфортное ощущение, вызванное шумом.
Поскольку другие конфигурации, а также операции и результаты настоящего варианта осуществления подобны таковым по первому варианту осуществления, их подробное описание в материалах настоящей заявки будет опущено.
Пятый вариант осуществления
В первом варианте осуществления генератор 14 напряжения детектирования положения выдает напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет цикл, равный m-кратному значению цикла Tc переключения, выданного генератором 13 цикла переключения, и которые отличны по фазе друг от друга, где m установлено в качестве целого числа от трех или более. Однако значение m не является точно определенным.
В пятом варианте осуществления значение m ограничено 6n (n - натуральное число). А именно цикл Thv напряжений Vuh, Vvh и Vwh детектирования положения ограничен 6n-кратным значением (n - натуральное число) цикла Tc переключения. Соответственно разностью фаз между напряжениями Vuh, Vvh и Vwh детектирования положения являются 120°, и напряжения Vuh, Vvh и Vwh детектирования положения могут устанавливаться в качестве уравновешенных трехфазных команд напряжения.
В качестве примера колебательные сигналы напряжения в случае n=1 показаны на фиг.12, где используются цикл Tc переключения и цикл Thv напряжения детектирования положения. На фиг.12 +Vh и -Vh, каждое из которых имеет произвольное значение, попеременно выдаются каждые три интервала, а разностью фаз между напряжениями Vuh, Vvh и Vwh детектирования положения является два интервала. В этом случае, поскольку цикл Thv напряжений детектирования положения имеет шесть интервалов, разность фаз между двумя интервалами имеет значение 360°/6 интервалов × 2 интервала = 120°, а следовательно, напряжения Vuh, Vvh и Vwh детектирования положения становятся уравновешенными напряжениями трехфазного переменного тока. Поэтому можно минимизировать влияние приложения неуравновешенных напряжений трехфазного переменного тока к вращающейся электрической машине 1. В дополнение по сравнению со случаем, где применяются неуравновешенные напряжения трехфазного переменного тока, можно упрощать расчет, такой как преобразование Фурье или тому подобное, требуемый для оценки положения.
Поскольку другие конфигурации, а также операции и результаты настоящего варианта осуществления подобны таковым по первому варианту осуществления, их подробное описание в материалах настоящей заявки будет опущено.
Шестой вариант осуществления
На фиг.13 показана структурная схема, показывающая конфигурацию контроллера вращающейся электрической машины согласно шестому варианту осуществления. Те составные части, которые соответствуют составным частям первого варианта осуществления, снабжены идентичными условными обозначениями.
В шестом варианте осуществления средство 4 управления содержит блок 18 вычисления частоты вращения для вычисления частоты вращения вращающейся электрической машины 1 на основании положения θp ротора, выдаваемого средством 3 вычисления положения. Информация о частоте вращения, вычисленной блоком 18 вычисления частоты вращения, обеспечивается в генератор 14 напряжения детектирования положения.
Когда частота вращения вращающейся электрической машины 1 относительно высока, можно легко оценивать положение ротора вращающейся электрической машины 1, используя наведенное напряжение вращающейся электрической машины 1, не накладывая напряжения Vuh, Vvh и Vwh детектирования положения на напряжения Vu*, Vv* и Vw* основных гармоник. В шестом варианте осуществления, когда частота вращения вращающейся электрической машины 1, выдаваемая блоком 18 вычисления частоты вращения, достигает предопределенной частоты вращения или большей, генератор 14 напряжения детектирования положения устанавливает напряжения Vuh, Vvh и Vwh детектирования положения в ноль, так что напряжения детектирования положения не оказывают влияния на напряжения Vu*, Vv* и Vw* основных гармоник. В дополнение способ оценки переключается на способ, в котором положение ротора вращающейся электрической машины оценивается на основании наведенного напряжения вращающейся электрической машины 1.
Используя вышеприведенную конфигурацию, можно устранять дополнительные энергетические потери, которые вызваны приложением, к вращающейся электрической машине 1, высокочастотных напряжений, включающих в себя напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет цикл, равный m-кратному значению цикла переключения, и которые отличны по фазе друг от друга.
Поскольку другие конфигурации, а также операции и результаты настоящего варианта осуществления подобны таковым по первому варианту осуществления, их подробное описание в материалах настоящей заявки будет опущено.
Седьмой вариант осуществления
Прежде всего перед описанием контроллера вращающейся электрической машины согласно седьмому варианту осуществления настоящего изобретения, будет описана традиционная технология, в которой, как описано в уровне техники, ради снижения затрат на датчики тока, постоянный ток шины, который протекает между источником напряжения постоянного тока, подающим напряжение постоянного тока на инвертор, и инвертором, детектируется с использованием датчика тока, а затем фаза вращающейся электрической машины 1, в которой в настоящее время протекает ток, получается посредством вычисления на основании разницы во временных характеристиках переключения между ключами соответственных фаз инвертора во время детектирования постоянного тока шины.
На фиг.14 показана структурная схема, показывающая контроллер традиционной вращающейся электрической машины, включающий в себя средство 30 вычисления тока вращающейся электрической машины, которое вычисляет ток вращающейся электрической машины по постоянному току Idc шины, который детектирован единственной деталью средства 29 детектирования тока шины (датчика тока). Отмечено, что на фиг.14 вращающаяся электрическая машина 1 не оснащена средством оценки положения, но оснащена датчиком 31 положения ротора для детектирования положения вращения машины. Однако, поскольку такая конфигурация не имеет прямого отношения к вычислению токов вращающейся электрической машины, выполняемому средством 30 вычисления тока вращающейся электрической машины, его описание будет опущено.
Контроллер вращающейся электрической машины, показанный на фиг.14, включает в себя средство 29 детектирования тока шины, которое является единственным датчиком тока, для детектирования постоянного тока Idc шины, протекающего между источником 28 напряжения постоянного тока и инвертором 6, и также включает в себя средство 30 вычисления тока вращающейся электрической машины для вычисления токов iu и iv вращающейся электрической машины, которые протекают во вращающуюся электрическую машину 1, в соответствии с постоянным током Idc шины, детектированным средством 29 детектирования тока шины, и с логическими сигналами Vu1, Vv1 и Vw1, выдаваемыми из средства 5 широтно-импульсной модуляции.
На фиг.15 показаны временные изменения (фиг.15(a)) напряжений Vu*, Vv* и Vw* основных гармоник, выдаваемые из двухфазного/трехфазного конвертера 10, и треугольную волну Cs в случае, где применяется способ управления широтно-импульсной модуляцией, использующий треугольную волну Cs, и также показывает временные изменения (фиг.15 (b)) логических сигналов Vu1, Vv1 и Vw1, выдаваемые из контроллера 15 широтно-импульсной модуляции. Контроллер 15 широтно-импульсной модуляции выдает «высокие» логические сигналы Vu1, Vv1 и Vw1, когда соответственные напряжения Vu*, Vv* и Vw* основных гармоник больше, чем треугольная волна Cs, а с другой стороны, выдает «низкие» логические сигналы Vu1, Vv1 и Vw1, когда напряжения основных гармоник меньше, чем треугольная волна Cs.
На фиг.16 показана структурная схема, показывающая состояние соединения между источником 28 напряжения постоянного тока и средством 29 детектирования тока шины, и соединения между источником 28 напряжения постоянного тока и инвертором 6.
Ключи UP, VP, WP, UN, VN, WN инвертора 6 включаются/выключаются схемой 31 возбуждения вентилей в соответствии с логическими сигналами Vu1, Vv1 и Vw1, которые выдаются из средства 5 широтно-импульсной модуляции. Например, ключ UP включается и выключается, когда логический сигнал Vu1 является «высоким» и «низким» соответственно. Ключ UN включается и выключается, когда логический сигнал Vu1 является «низким» и «высоким», соответственно. Ключ VP включается и выключается, когда логический сигнал Vv1 является «высоким» и «низким» соответственно. Ключ VN включается и выключается, когда логический сигнал Vv1 является «низким» и «высоким» соответственно. Ключ WP включается и выключается, когда логический сигнал Vw1 является «высоким» и «низким» соответственно. Ключ WN включается и выключается, когда логический сигнал Vw1 является «низким» и «высоким» соответственно.
Далее будет описан принцип работы вычисления токов вращающейся электрической машины посредством использования постоянного тока Idc шины.
Когда логические сигналы выдаются, как показано на фиг.15(b), в интервале T1, ключи UP, VP и WN включены, а оставшиеся ключи выключены. Таким образом, с временными характеристиками переключения в интервале T1, ток iw, протекающий в фазе W вращающейся электрической машины 1, идентичен току Idc, детектированному средством 29 детектирования тока шины. Затем в интервале T2, ключи UP, VN и WN включены, а оставшиеся ключи выключены. Таким образом, в течение временных характеристик переключения интервала T2, ток iu, протекающий в фазе U вращающейся электрической машины 1, идентичен току Idc, детектированному средством 29 детектирования тока шины. Таким образом, в интервале T1 может быть получен ток iw вращающейся электрической машины фазы W, а в интервале T2 может быть получен ток iu вращающейся электрической машины фазы U. Ток iv вращающейся электрической машины оставшейся фазы V может быть получен с использованием формулы (14), приведенной ниже, поскольку сумма трехфазных токов равна нулю. Таким образом, средство 29 детектирования тока шины способно к детектированию токов iu, iv и iw вращающейся электрической машины трех фаз в течение полуцикла (цикла Tc переключения) треугольной волны Cs.
 (14)
(14)
Таким образом, на основании разницы временных характеристик переключения между логическими сигналами Vu1, Vv1 и Vw1, которые выдаются из средства 5 широтно-импульсной модуляции, и постоянного тока Idc шины, детектированного средством 29 детектирования тока шины, средство 30 детектирования тока вращающейся электрической машины идентифицирует фазу, вращающейся электрической машины 1, в которой протекает ток, соответствующий детектированному постоянному току Idc шины, и рассчитывает ток вращающейся электрической машины каждой фазы.
Для детектирования трехфазных токов по существу предпочтительно детектировать токи вращающейся электрической машины трех фаз с одними и теми же временными характеристиками. Однако поскольку используется разница во временных характеристиках переключения между логическими сигналами Vu1, Vv1 и Vw1, невозможно детектировать токи вращающейся электрической машины трех фаз с одними и теми же временными характеристиками. Более точно, токи вращающейся электрической машины фазы W и фазы U детектируются в интервале T1 и T2 переключения соответственно, и ток вращающейся электрической машины фазы V получается посредством использования формулы (14). Таким образом, возникает разность по времени после того, как детектирован ток вращающейся электрической машины фазы W в интервале T1 переключения, до того, как ток вращающейся электрической машины фазы U детектирован в интервале T2 переключения. Поэтому может быть случай, где значения токов вращающейся электрической машины трех фаз изменяются в течение разности по времени, имея следствием возникновение погрешности детектирования. Однако интервал T1 переключения и интервал T2 переключения являются соседними друг другу, и, в большинстве случаев, разность по времени составляет минуту. Поэтому фактически можно игнорировать погрешность детектирования, вызванную изменением токов в течение разности по времени.
В конфигурации, показанной на фиг.14, средство 30 вычисления тока вращающейся электрической машины вычисляет токи iu и iv вращающейся электрической машины, протекающие во вращающуюся электрическую машину 1, в соответствии с постоянным током Idc шины, детектированным средством 29 детектирования тока шины, и с логическими сигналами Vu1, Vv1 и Vw1, выдаваемыми из средства 5 широтно-импульсной модуляции. Однако, как показано на фиг.17, средство 30 вычисления тока вращающейся электрической машины может вычислять токи вращающейся электрической машины, протекающие во вращающуюся электрическую машину 1, в соответствии с постоянным током Idc шины, детектированным средством 29 детектирования тока шины, и напряжениями Vu*, Vv* и Vw* основных гармоник, выдаваемыми из двухфазного/трехфазного конвертера 10. То есть в конфигурации, показанной на фиг.14, сигналы, вводимые в средство 30 вычисления тока вращающейся электрической машины, являются постоянным током Idc шины, и логическими сигналами Vu1, Vv1 и Vw1, которые выдаются из средства 5 широтно-импульсной модуляции, тогда как в конфигурации, показанной на фиг.17, сигналы, вводимые в средство 30 вычисления тока вращающейся электрической машины, являются постоянным током Idc шины и напряжениями Vu*, Vv* и Vw* основных гармоник.
На основании конфигурации, показанной на фиг.17, принцип работы средства 30 вычисления тока вращающейся электрической машины, которое вычисляет токи вращающейся электрической машины в соответствии с постоянным током Idc шины, будет описан со ссылкой на фиг.18.
На фиг.18 показаны, аналогично фиг.15, временные изменения напряжений Vu*, Vv* и Vw* основных гармоник, выдаваемые из двухфазного/трехфазного конвертера 10, и треугольную волну Cs в случае, где применяется способ управления широтно-импульсной модуляцией, использующий треугольную волну Cs, и также показывает, какая фаза тока вращающейся электрической машины получается из постоянного тока Idc шины, детектированного средством 29 детектирования тока шины, в соответствии с временными изменениями логических сигналов и разницы между логическими сигналами (фиг.18(b)).
Среди напряжений Vu*, Vv* и Vw* основных гармоник, как показано на фиг.18(a), одно, которое является наибольшим по значению, указывается ссылкой как максимальная фаза (Vu* на фиг.18(a)), одно, которое является наименьшим, указывается ссылкой как минимальная фаза (Vw* на фиг.18(a)), и одно, которое находится между наибольшим и наименьшим, указывается ссылкой как промежуточная фаза (Vv* на фиг.18(a)). В случае, где применяется способ управления широтно-импульсной модуляцией, использующий треугольную волну Cs, когда токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины, фазные токи вращающейся электрической машины максимальной фазы и минимальной фазы могут быть получены в течение полуцикла треугольной волны Cs (цикла Tc переключения). В дополнение токи детектируются до и после того, как промежуточная фаза перекрывается с треугольной волной Cs (см. фиг.18(b)).
Когда треугольная волна Cs имеет положительный наклон, ток вращающейся электрической машины минимальной фазы может получаться до того, как промежуточная фаза перекрывается с треугольной волной Cs (на фиг.18 фаза W может детектироваться на интервале T1), тогда как ток вращающейся электрической машины максимальной фазы может быть получен после того, как промежуточная фаза перекрывается с треугольной волной Cs (на фиг.18 фаза U может детектироваться на интервале T2). Когда треугольная волна Cs имеет отрицательный наклон, ток вращающейся электрической машины максимальной фазы может получаться до того, как промежуточная фаза перекрывается с треугольной волной Cs (на фиг.18 фаза U может детектироваться на интервале T4), тогда как ток вращающейся электрической машины минимальной фазы может быть получен после того, как промежуточная фаза перекрывается с треугольной волной Cs (на фиг.18 фаза W может детектироваться на интервале T5). Напряжения Vu*, Vv* и Vw* основных гармоник и токи вращающейся электрической машины, которые получены на основании постоянного тока Idc шины, имеют описанное выше соотношение и, таким образом, используя ток Idc шины постоянного тока, детектированный по постоянному току 29 шины, и напряжения Vu*, Vv* и Vw* основных гармоник, можно получать токи вращающейся электрической машины из тока Idc шины постоянного тока.
Таким образом, как показано на фиг.14-18, в случае, когда фаза вращающейся электрической машины 1, в которой в настоящее время протекает ток, вычисляется посредством использования постоянного тока Idc шины и разницы во временных характеристиках переключения между ключами соответственных фаз инвертора в момент времени детектирования постоянного тока Idc шины, требуется всего лишь единственный датчик тока для детектирования постоянного тока Idc шины в отличие от случаев, описанных в с первого по шестой вариантах осуществления, где требуется множество датчиков тока для непосредственного детектирования токов вращающейся электрической машины в, по меньшей мере, двух фазах. Поэтому, преимущественно, можно снижать затраты на датчик тока.
Однако, как описано выше, способ вычисления токов вращающейся электрической машины, на основании постоянного тока Idc шины, использует разницу во временных характеристиках переключения между ключами соответственных фаз инвертора в момент времени детектирования постоянного тока Idc шины. Таким образом, как показано на фиг.19(a), например, когда значения напряжений Vu*, Vv* и Vw* основных гармоник близки или идентичны друг к другу, временные характеристики переключения соответственных фаз становятся близкими или идентичными друг другу. Как результат, в случае конфигурации, показанной на фиг.14 или фиг.17, период каждого интервала переключения, такой как T1, T2, и тому подобное, становится очень коротким или исчезает, как показано на фиг.19(b). Таким образом, становится крайне трудно определять фазу вращающейся электрической машины 1, в которой протекает ток, идентичный постоянному току, детектированному средством 29 детектирования тока шины. Поэтому для того чтобы определять фазу, в которой протекает ток, идентичный постоянному току Idc шины, в качестве интервала переключения необходимо обеспечить предопределенное или большее значение времени.
Отмечено, что контроллер, описанный в каждом из с первого по шестой вариантах осуществления, непосредственно детектирует токи вращающейся электрической машины, по меньшей мере, двух фаз, используя датчик тока или тому подобное, и не использует разницу во временных характеристиках переключения между соответственными фазами. Поэтому, даже если значения напряжений Vu*, Vv* и Vw* основных гармоник близки или идентичны друг другу, можно гарантированно детектировать токи вращающейся электрической машины соответственных фаз вращающейся электрической машины 1, и вышеприведенная проблема не возникает.
Когда токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины, для того чтобы добиться определения фазы, в которой протекает ток, идентичный постоянному току Idc шины, даже когда напряжения Vu*, Vv* и Vw* основных гармоник близки или идентичны друг другу, как показано на фиг.19(a), напряжения Vuh, Vvh и Vwh детектирования положения накладываются на напряжения Vu*, Vv* и Vw* основных гармоник, выдаваемые из двухфазного/трехфазного конвертера 10, в силу чего вышеприведенная проблема может быть решена. В дальнейшем будет описан седьмой вариант осуществления настоящего изобретения, в котором токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины посредством использования напряжений Vuh, Vvh и Vwh детектирования положения.
На фиг.20 показана структурная схема, показывающая контроллер вращающейся электрической машины согласно седьмому варианту осуществления. Те составные части, которые соответствуют составным частям первого варианта осуществления, снабжены идентичными условными обозначениями.
Контроллер вращающейся электрической машины согласно седьмому варианту осуществления основан на конфигурации по первому варианту осуществления, показанному на фиг.1, а средство 2 детектирования тока, показанное на фиг.1, опущено. Вместо того контроллер включает в себя средство 29 детектирования тока шины для детектирования тока Idc шины, который протекает между инвертором 6 и источником 28 напряжения постоянного тока, подающим энергию постоянного тока на инвертор 6, средство 30 вычисления тока вращающейся электрической машины для вычисления токов вращающейся электрической машины в соответствии с током Idc шины, детектированным средством 29 детектирования тока шины, и с логическими сигналами Vu1, Vv1 и Vw1, выдаваемыми из средства 5 широтно-импульсной модуляции. Отмечено, что даже когда конфигурация, в которой логические сигналы Vu1, Vv1 и Vw1, выданные из средства 5 широтно-импульсной модуляции, вводятся в средство 30 вычисления тока вращающейся электрической машины, заменена конфигурацией, в которой напряжения Vu*, Vv* и Vw* основных гармоник, выданные из двухфазного/трехфазного конвертера 10, вводятся в средство 30 вычисления тока вращающейся электрической машины таким же образом, как в случае, показанном на фиг.17, может получаться сходный результат.
Здесь, в случае, когда напряжения Vu*, Vv* и Vw* основных гармоник, выданные из двухфазного/трехфазного конвертера 10, близки друг к другу, как показано на фиг.19(a), затем, когда напряжения Vuh, Vvh и Vwh детектирования положения, имеющие формы волны (цикл Thv=6n·Tc, n=1), показанные на фиг.12, описанной в пятом варианте осуществления, например, накладываются посредством использования сумматора 41 средства 4 управления, показанного на фиг.20, команды Vup*, Vvp* и Vwp* напряжения, которые являются результирующими выходными сигналами, имеют формы волны, показанные на фиг.21(a). Отмечено, что средние значения команд Vup*, Vvp* и Vwp* напряжения идентичны напряжениям Vu*, Vv* и Vw* основных гармоник, показанным на фиг.19(a) соответственно. Таким образом, когда частоты напряжений Vuh, Vvh и Vwh детектирования положения установлены на определенный уровень или выше, который не оказывает влияние на управление вращающейся электрической машиной 1, можно управлять вращающейся электрической машиной 1 таким же образом, как в случае, когда напряжения Vuh, Vvh и Vwh детектирования положения не накладываются.
В случае, когда команды Vup*, Vvp* и Vwp* напряжения, выданные из средства 4 управления, имеют формы волны, показанные на фиг.21(a), логические сигналы Vu1, Vv1 и Vw1, соответственно выдаваемые из контроллера 15 широтно-импульсной модуляции, являются такими, как показано на фиг.21(b). То есть периоды интервалов T1 и T4 переключения, которые являются короткими на фиг.19(b), расширяются на фиг.21(b). Поскольку интервалы T1 и T4 переключения расширены, на интервале T1 переключения можно детектировать ток iv фазы V вращающейся электрической машины, а в интервале T4 переключения можно детектировать ток iu фазы U вращающейся электрической машины. Ток iw оставшейся фазы W вращающейся электрической машины может вычисляться с использованием вышеописанной формулы (14). Другими словами, посредством наложения напряжений Vuh, Vvh и Vwh детектирования положения становится возможным детектировать токи вращающейся электрической машины трех фаз в течение одного цикла (двухкратного значения цикла Tc переключения) треугольной волны Cs. Отмечено, однако, что, поскольку интервалы T2 и T5 переключения являются такими же, как на фиг.19(b), невозможно получать токи вращающейся электрической машины в течение этих интервалов.
Максимальное значение амплитуды Vh напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых из генератора 14 напряжения детектирования положения, является значением, полученным вычитанием напряжения, необходимого для возбуждения приведения в действие вращающейся электрической машины 1 из максимального напряжения, выдаваемого инвертором 6, тогда как минимальное значение амплитуды Vh равно или больше, чем напряжение рассогласования, вызванное временем бестоковой паузы для предотвращения короткого замыкания переключающего элемента в инверторе 6. Соответственно можно получить эффект от вычисления токов вращающейся электрической машины на основании постоянного тока шины.
Как описано выше, в седьмом варианте осуществления напряжения Vuh, Vvh и Vwh детектирования положения, которые отличны по фазе друг от друга, заблаговременно накладываются на напряжения Vu*, Vv* и Vw* основных гармоник, и токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины. Соответственно требуется всего лишь единственная деталь средства детектирования тока шины, такая как датчик тока или тому подобное, что увеличивает снижение затрат. В дополнение, даже когда значения напряжений Vu*, Vv* и Vw* основных гармоник близки или идентичны друг другу, можно вычислять и получать токи трех фаз вращающейся электрической машины.
Восьмой вариант осуществления
Как описано в седьмом варианте осуществления, когда напряжения Vuh, Vvh и Vwh детектирования положения, которые отличны по фазе друг от друга, заранее накладываются на напряжения Vu*, Vv* и Vw* основных гармоник, а затем токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины, даже если значения напряжений Vu*, Vv* и Vw* основных гармоник близки или идентичны друг другу, преимущественно можно получать соответственные токи трех фаз вращающейся электрической машины.
Однако когда токи вращающейся электрической машины вычисляются на основании постоянного тока шины посредством использования напряжений Vuh, Vvh и Vwh детектирования положения, имеющих формы волны (цикл Thv=6n·Tc, n=1), показанные на фиг.12, интервал детектирования токов трех фаз вращающейся электрической машины является циклом Tcs треугольной волны Cs (= 2Tc, то есть двойному циклу Tc переключения), как показано на фиг.21. С другой стороны, в конфигурации на фиг.14 или фиг.17, когда токи трех фаз вращающейся электрической машины являются детектируемыми (когда значения напряжений Vu*, Vv* и Vw* основных гармоник не близки и не идентичны друг другу), интервал детектирования токов трех фаз вращающейся электрической машины является полуциклом треугольной волны Cs (= циклу Tc переключения), как показано на фиг.15(b) или 18(b). То есть, когда токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины посредством использования напряжений Vuh, Vvh и Vwh детектирования положения, имеющих формы волны, показанные на фиг.12, как они есть, интервал детектирования токов трех фаз вращающейся электрической машины становится двойным циклом Tc переключения.
Дополнительно, в способе, в котором токи вращающейся электрической машины вычисляются на основании постоянного тока шины, посредством использования напряжений Vuh, Vvh и Vwh детектирования положения, имеющих формы волны, показанные на фиг.12, токи фазы V и фазы U вращающейся электрической машины детектируются в интервале T1 переключения и интервале T4 переключения соответственно, как показано на фиг.21(b). В дополнение ток фазы W вращающейся электрической машины получается на основании формулы (14). Таким образом, возникает разность по времени после того, как детектирован ток вращающейся электрической машины фазы V в интервале T1 переключения, до того, как ток вращающейся электрической машины фазы U детектирован в интервале T4 переключения. То есть в конфигурации, показанной на каждой из фиг.14 и фиг.17, разность по времени, возникающая в случае, где токи вращающейся электрической машины вычисляются на основании постоянного тока шины, равна разности по времени между интервалом T1 переключения и интервалом T2 переключения, которые являются соседними друг другу, как показано на фиг.15(b) или фиг.18(b). С другой стороны, в способе, в котором токи вращающейся электрической машины вычисляются на основании постоянного тока шины, посредством использования напряжений Vuh, Vvh и Vwh детектирования положения, имеющих формы волны, показанные на фиг.12, разность по времени равна разности по времени между интервалом T1 переключения и интервалом T4 переключения, которые отделены друг от друга на расстояние двух интервалов переключения, как показано на фиг.21(b). Таким образом, значения трехфазных токов вращающейся электрической машины могут значительно изменяться в течение разности по времени, и есть вероятность, что возникает непренебрежимая погрешность детектирования.
Таким образом, восьмой вариант осуществления направлен на преодоление проблемы, возникающей в седьмом варианте осуществления. То есть в отношении напряжений Vuh, Vvh и Vwh детектирования положения, которые должны накладываться на напряжения Vu*, Vv* и Vw* основных гармоник, хотя напряжения Vuh, Vvh и Vwh детектирования положения, имеющие формы волны, показанные на фиг.12, каждое имеет только два значения, то есть +Vh и -Vh, напряжения Vuh, Vvh и Vwh детектирования положения каждое устанавливается, например, как показано на фиг.22, в три разных значения, то есть +Vh, -Vh и 0, в силу чего можно вычислять токи вращающейся электрической машины на основании постоянного тока шины. Общая конфигурация, за исключением описанной выше, является такой же, как конфигурация согласно седьмому варианту осуществления, показанному на фиг.20.
Здесь, когда напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет три значения, как показано на фиг.22, соответственно накладываются сумматором 41 средства 4 управления, показанного на фиг.20, тогда команды Vup*, Vvp* и Vwp* напряжения, которые являются результирующими выходными сигналами, имеют формы волны, как показано на фиг.23(a). Логические сигналы Vu1, Vv1 и Vw1, выдаваемые из контроллера 15 широтно-импульсной модуляции в соответствии с командами Vup*, Vvp* и Vwp* напряжения, являются такими, как показано на фиг.23(b).
Таким образом, используя напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет три значения, то есть +Vh, -Vh и 0, показанные на фиг.22, можно преодолевать проблему седьмого варианта осуществления, и также возможно уменьшать интервал детектирования токов трех фаз вращающейся электрической машины до цикла Tc переключения.
Отмечено, что даже если используются напряжения Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет три значения, то есть +Vh, -Vh и 0, показанные на фиг.22, возможен случай, где команды Vup*, Vvp* и Vwp* напряжения становятся близкими друг к другу в зависимости от значений напряжений Vu*, Vv* и Vw* основных гармоник, а следовательно, возникает интервал переключения, в котором токи вращающейся электрической машины не могут детектироваться. В таком случае можно детектировать токи вращающейся электрической машины, например, посредством приведения в соответствие напряжений Vuh, Vvh и Vwh детектирования положения, каждое из которых имеет четыре значения, то есть +2Vh, +Vh, -2Vh и -Vh, или посредством приведения в соответствие напряжений Vuh, Vvh и Vwh, каждое из которых имеет непрерывно изменяющийся модуль, таких как синусоидальная волна, то есть посредством приведения в соответствие напряжений Vuh, Vvh и Vwh детектирования положения, имеющих множество значений.
Отмечено, что в восьмом варианте осуществления, для того чтобы вычислить токи вращающейся электрической машины по постоянному току Idc шины, каждое из напряжений Vuh, Vvh и Vwh детектирования положения имеет три значения, тогда как цикл каждого напряжения всегда установлен в цикл m·Tc, который равен m-кратному значению (m - целое число трех или более) цикла Tc переключения. Соответственно вычисление оценки положения ротора средством 3 оценки положения совсем не подвергается влиянию. Поэтому когда токи вращающейся электрической машины вычисляются на основании постоянного тока Idc шины посредством использования напряжений Vuh, Vvh и Vwh детектирования положения, не обязательно устанавливать датчик положения, а в дополнение можно уменьшить количество датчиков тока. Таким образом, можно получить контроллер вращающейся электрической машины 1, имеющий простую и недорогую конфигурацию.
Девятый вариант осуществления
На фиг.24 показана структурная схема, показывающая контроллер вращающейся электрической машины согласно девятому варианту осуществления настоящего изобретения. Те составные части, которые соответствуют составным частям седьмого варианта осуществления (фиг.20), имеют те же условные обозначения.
Контроллер вращающейся электрической машины согласно девятому варианту осуществления основан на конфигурации согласно седьмому варианту осуществления (фиг.20) и дополнительно включает в себя, в средстве 4 управления, преобразователь 34 напряжения детектирования положения таким образом, чтобы быть размещенным между генератором 14 напряжения детектирования положения и сумматором 41.
Преобразователь 34 напряжения детектирования положения принимает напряжения Vu*, Vv* и Vw* основных гармоник для приведения в действие вращающейся электрической машины 1, выдаваемые из двухфазного/трехфазного конвертера 10, и изменяет, на основании напряжений Vu*, Vv* и Vw* основных гармоник, амплитуды напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых из генератора 14 напряжения детектирования положения, а затем выдает измененные напряжения Vuh2, Vvh2 и Vwh2 детектирования положения. Измененные напряжения Vuh2, Vvh2 и Vwh2 детектирования положения, выдаваемые из преобразователя 34 напряжения детектирования положения, прибавляются к напряжениям Vu*, Vv* и Vw* основных гармоник сумматором 41.
В случае конфигурации согласно седьмому варианту осуществления (фиг.20), когда значения команд Vup*, Vvp* и Vwp* напряжения близки или идентичны друг другу, очень трудно идентифицировать фазу, в которой протекает ток вращающейся электрической машины, который идентичен постоянному току шины, а следовательно, период детектирования тока увеличивается. В дополнение возможно возникновение погрешности детектирования тока. Для того чтобы решить эту проблему, в вышеприведенном восьмом варианте осуществления он сконфигурирован таким образом, чтобы каждое из напряжений Vuh, Vvh и Vwh детектирования положения имело три значения, то есть +Vh, -Vh и 0, тем самым токи вращающейся электрической машины могут вычисляться на основании постоянного тока шины. С другой стороны, в девятом варианте осуществления, для более быстрого решения проблемы, чем в восьмом варианте осуществления, амплитуда напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых из генератора 14 напряжения детектирования положения, изменяется на основании напряжений Vu*, Vv* и Vw* основных гармоник. Принцип работы будет описан ниже.
На фиг.25 показана поясняющая диаграмма работы преобразователя 34 напряжения детектирования положения. На фиг.25(a) показаны выходные формы волны напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых из генератора 14 напряжения детектирования положения, а на фиг.25(b) показаны выходные формы волны измененных напряжений Vuh2, Vvh2 и Vwh2 детектирования положения, выдаваемых из преобразователя 34 напряжения детектирования положения. Отмечено, что напряжения Vuh, Vvh и Vwh детектирования положения, показанные на фиг.25(a), имеют такие же формы волны (цикл Thv=6n·Tc, n=1), как напряжения Vuh, Vvh и Vwh детектирования положения, показанные на фиг.12 соответственно и, таким образом, с K1 по K3, показанные на фиг.12, соответствуют с K1 по K3, показанным на фиг.25 соответственно.
Когда напряжения Vuh, Vvh и Vwh детектирования положения, показанные на фиг.25(a), выдаваемые из генератора 14 напряжения детектирования положения непосредственно накладываются на напряжения Vu*, Vv* и Vw* основных гармоник, без изменения благодаря преобразователю 34 напряжения детектирования положения, результирующие величины имеют формы волны, показанные на фиг.25(c), которые являются такими же, как формы колебаний сигнала, показанные на фиг.21(a).
На фиг.25(c), среди команд Vup*, Vvp* и Vwp* напряжения, которые получены наложением напряжений Vuh, Vvh и Vwh детектирования положения на напряжения Vu*, Vv* и Vw* основных гармоник соответственно, Vup* и Vwp* близки друг к другу на интервале K1. Соответственно период интервала T2 переключения уменьшается, и становится невозможным идентифицировать фазу, в которой протекает ток вращающейся электрической машины, который идентичен постоянному току шины. В дополнение на интервале K2 Vvp* и Vwp* близки друг к другу, и, таким образом, период интервала T5 переключения уменьшается, и становится невозможным идентифицировать фазу, в которой протекает ток вращающейся электрической машины, который идентичен постоянному току шины.
Таким образом, в девятом варианте осуществления, заблаговременно вычисляя периоды интервалов T1, T2 переключения, и тому подобное напряжений Vuh, Vvh и Vwh детектирования положения, на основании напряжений Vu*, Vv* и Vw* основных гармоник, преобразователь 34 напряжения детектирования положения проверяет, есть или нет состояние, где Vup*, Vvp* и Vwp* близки или идентичны друг другу, и, таким образом, периоды соответственных интервалов T1, T2 переключения, и тому подобное, уменьшаются, а следовательно, становится невозможным идентифицировать фазу, в которой протекает ток вращающейся электрической машины, который идентичен постоянному току шины (в дальнейшем указывается неидентифицируемое состояние).
Вышеприведенное неидентифицируемое состояние указывает состояние, где период каждого из интервалов T1, T2 переключения и тому подобное является более коротким, чем время вычисления средства 30 вычисления тока вращающейся электрической машины. В дополнение период каждого из интервалов T1, T2 переключения и тому подобное пропорционален разнице в значениях команд Vup*, Vvp* и Vwp* напряжения. Таким образом, можно получать период каждого из интервалов T1, T2 переключения и тому подобное из сумм напряжений Vu*, Vv* и Vw* основных гармоник, и напряжения Vuh, Vvh и Vwh детектирования положения соответственно (= командам Vup*, Vvp* и Vwp* напряжения).
Поэтому, когда период каждого из интервалов T1, T2 переключения и тому подобное, полученный благодаря вычислению, является неидентифицируемым, преобразователь 34 напряжения детектирования положения изменяет, в каждом цикле Tc переключения, значение амплитуды напряжений Vuh, Vvh и Vwh детектирования положения на величину ΔV, с тем чтобы избежать неидентифицируемого состояния, тем самым выдавая измененные напряжения Vuh2, Vvh2 и Vwh2 детектирования положения.
Преобразователь 34 напряжения детектирования положения изменяет значение напряжений Vuh, Vvh и Vwh детектирования положения в следующем цикле переключения так, чтобы значение, измененное в предыдущем цикле переключения, восстанавливалось на величину ΔV, тем самым выдавая измененные напряжения Vuh2, Vvh2 и Vwh2 детектирования положения. На фиг.25(d) показаны изменения в командах Vup*, Vvp* и Vwp* напряжения соответственных фаз в случае, где значения напряжений Vuh, Vvh и Vwh детектирования положения изменяются вышеописанным образом. Значение для изменения напряжений Vuh, Vvh и Vwh детектирования положения вычисляется и получается с использованием формулы (15), приведенной ниже, так что может гарантироваться, что период каждого из интервалов T1, T2 переключения и тому подобное будет тем периодом, который дает возможность идентификации фазы, в которой протекает ток вращающейся электрической машины, который идентичен постоянному току шины, то есть период является равным или большим, чем время вычисления средства 30 вычисления тока вращающейся электрической машины.

где AV - величина изменения напряжения детектирования положения;
Kt - пропорциональная постоянная
В случае на фиг.25(c), например, преобразователь 34 напряжения детектирования положения заблаговременно получает благодаря вычислению период каждого из интервалов T1 и T2 переключения и определяет, является или нет интервал T2 неидентифицируемым. Когда определено, что интервал T2 переключения является неидентифицируемым, как он есть, для того чтобы избежать неидентифицируемого состояния, как указанное в качестве интервала K1 на фиг.25(d), значение напряжения Vwh детектирования положения фазы W понижается на величину ΔV, выраженную формулой (16), в соответствии с формулой (15).

На интервале K2 следующего цикла переключения значение напряжения Vwh детектирования положения фазы W повышается на величину ΔV. Как показано на фиг.25(c), в интервале K2 Vvp* и Vwp* близки друг к другу, что приводит к неидентифицируемому состоянию. Таким образом, напряжение Vwh детектирования положения фазы W поднимается на интервале K2 на величину ΔV, которая является величиной изменения, выполняемого в интервале K1. Соответственно можно избежать неидентифицируемого состояния в интервале K2, показанном на фиг.25(d).
В примере, показанном на фиг.25(d), напряжение Vwh детектирования положения фазы W изменяется на величину ΔV на интервалах K1 и K2. Однако подобный результат может быть получен в случае, когда напряжение Vwh детектирования положения фазы W не изменяется, но напряжение Vuh детектирования положения фазы U изменяется на величину ΔV, или в случае, когда значения напряжения Vwh детектирования положения фазы W и напряжения Vuh детектирования положения фазы U изменяются (например, соответственно на величину AV/2), с тем чтобы быть на расстоянии друг от друга. В этом случае, однако, возможен случай, когда Vvp* и Vwp* удерживаются близкими друг к другу на интервале K2, и, таким образом, дополнительно необходимо изменять напряжение Vvh или Vwh детектирования положения фазы V или фазы W.
Как описано выше, в девятом варианте осуществления преобразователь 34 напряжения детектирования положения скомпонован между генератором 14 напряжения детектирования положения и сумматором 41, а с помощью преобразователя 34 напряжения детектирования положения разница в командах Vup*, Vvp* и Vwp* напряжения соответственных фаз оценивается на основании значений напряжений Vu*, Vv* и Vw* основных гармоник. На основании оцененной разности в соответственных фазах определяется, присутствует или нет неидентифицируемое состояние, а когда есть вероятность, что будет возникать неидентифицируемое состояние, изменяются амплитуды напряжений Vuh, Vvh и Vwh детектирования положения, выдаваемых из генератора 14 напряжения детектирования положения. Соответственно токи вращающейся электрической машины можно вычислять на основании постоянного тока шины, не ухудшая характеристики приведения в действие вращающейся электрической машины 1, и дополнительно может достигаться быстрое решение по сравнению со случаем по восьмому варианту осуществления. Дополнительно, поскольку изменяются только амплитуды напряжений Vuh, Vvh и Vwh детектирования положения без изменения напряжений Vu*, Vv* и Vw* основных гармоник, можно вычислить токи вращающейся электрической машины на основании постоянного тока Idc шины.
Промышленная применимость
Настоящее изобретение применимо к контроллеру вращающейся электрической машины, такой как асинхронная машина, синхронная машина или тому подобное, способному выполнять управление вращением, получая информацию о положении ротора без использования датчика положения ротора.
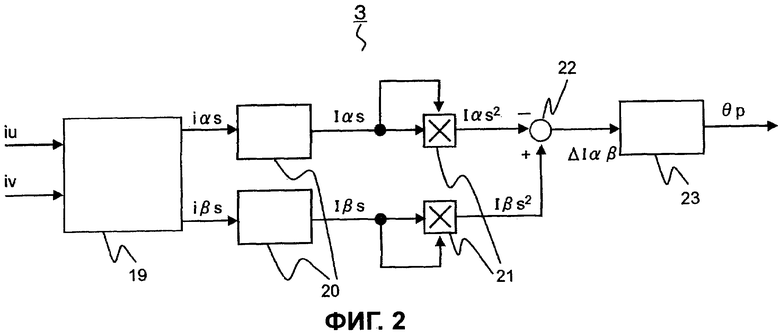
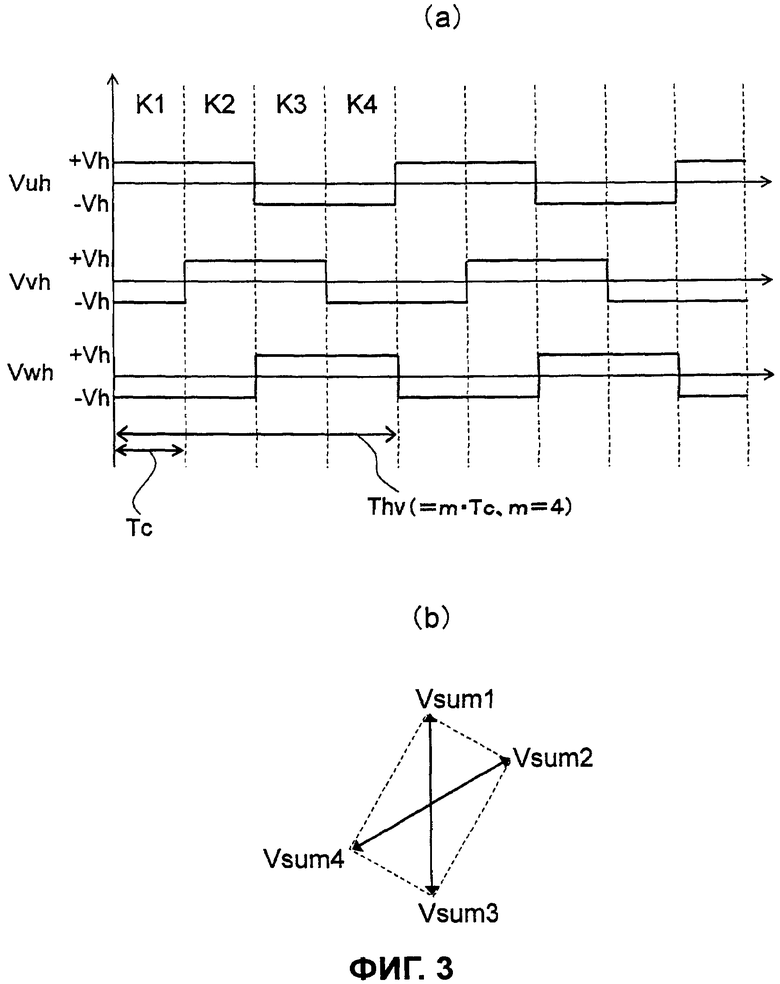
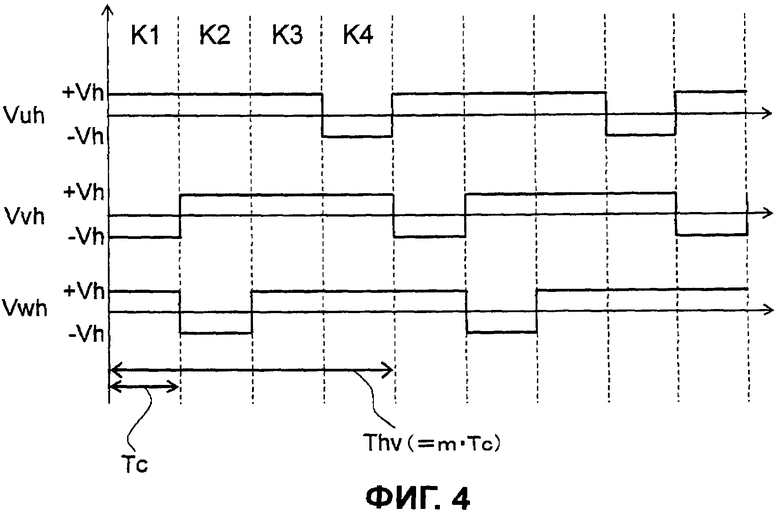
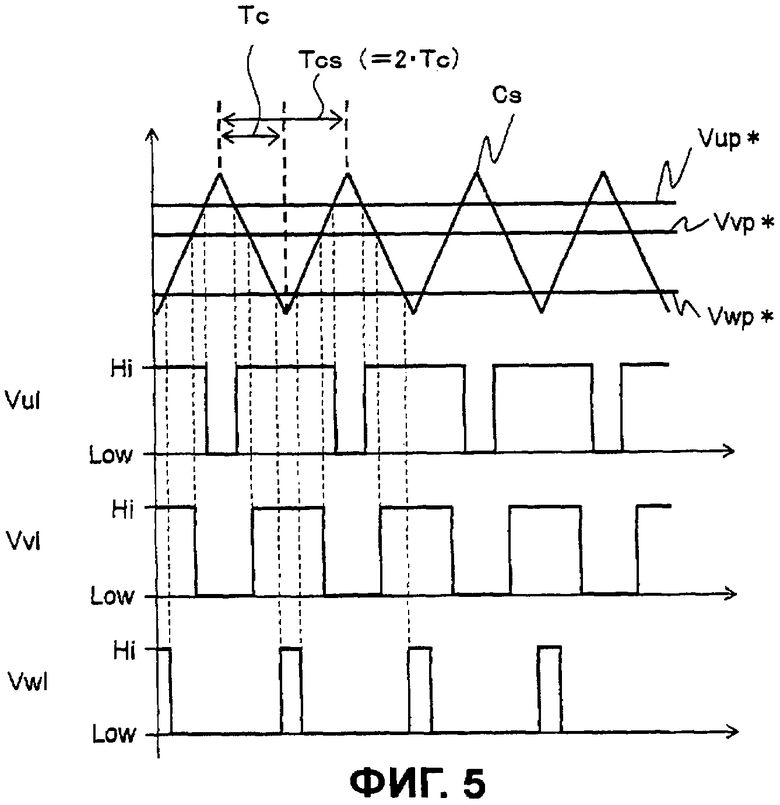
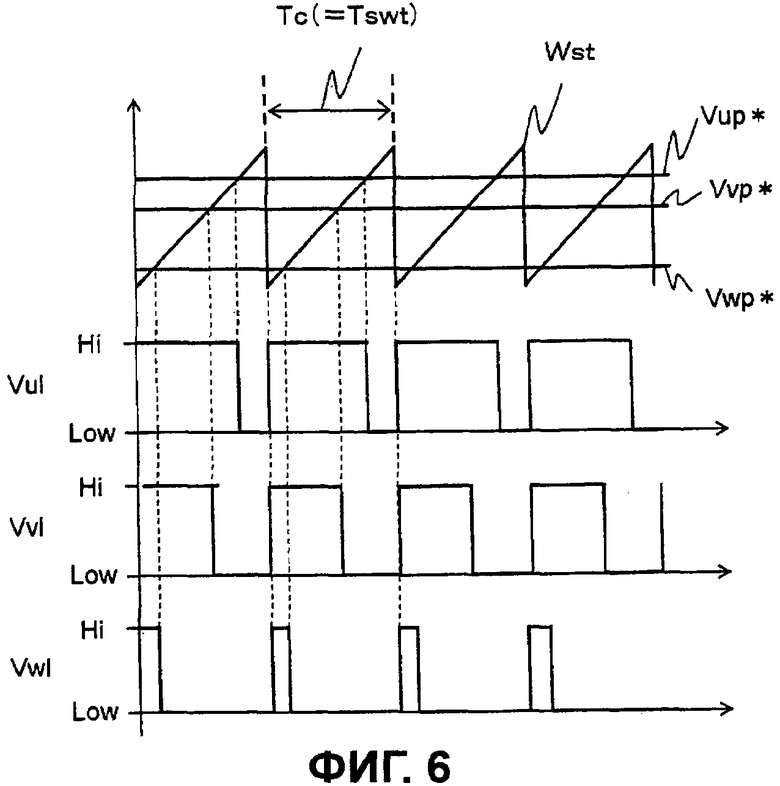
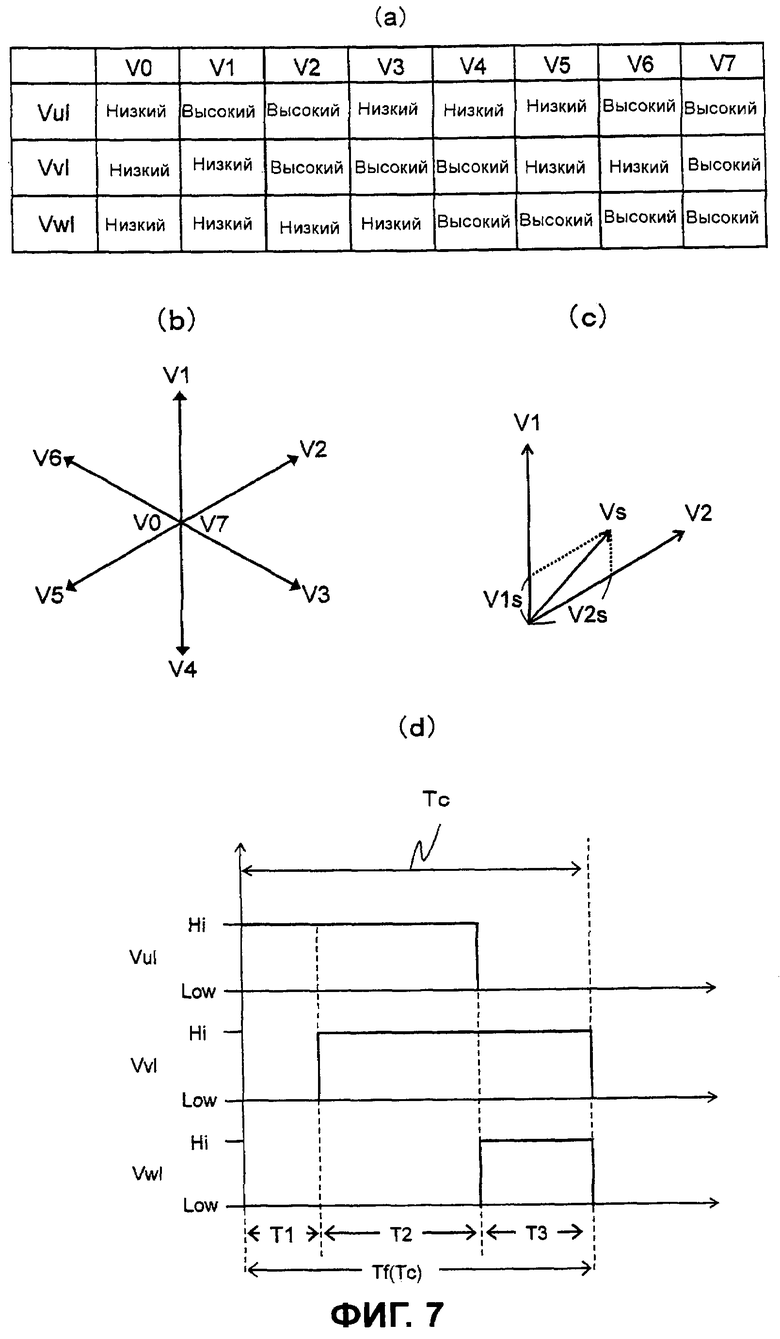
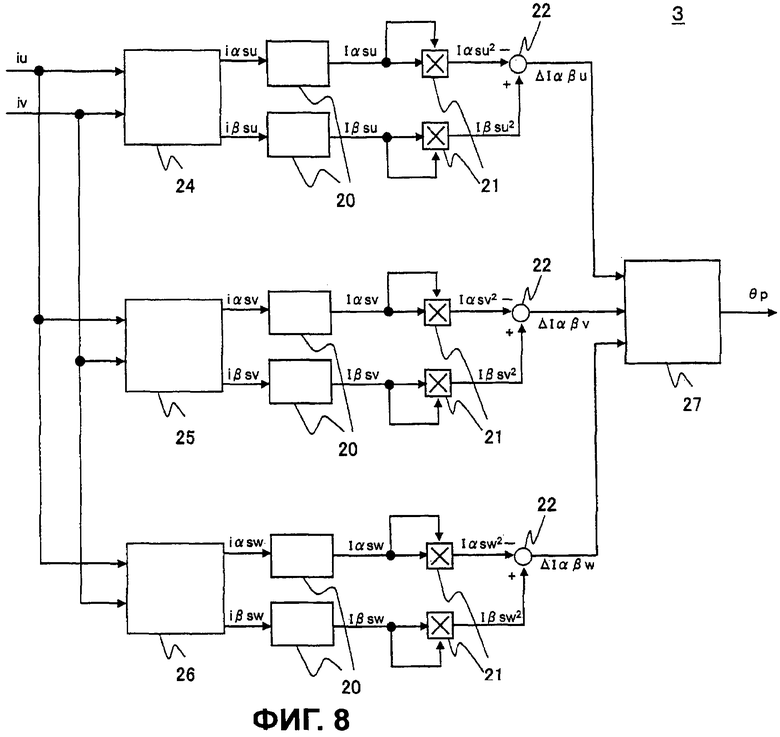
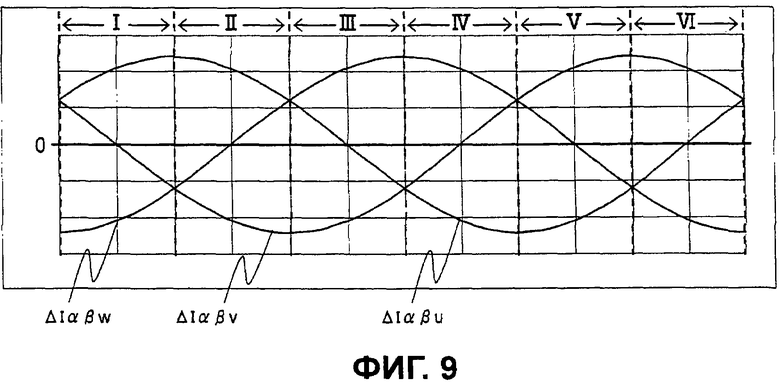
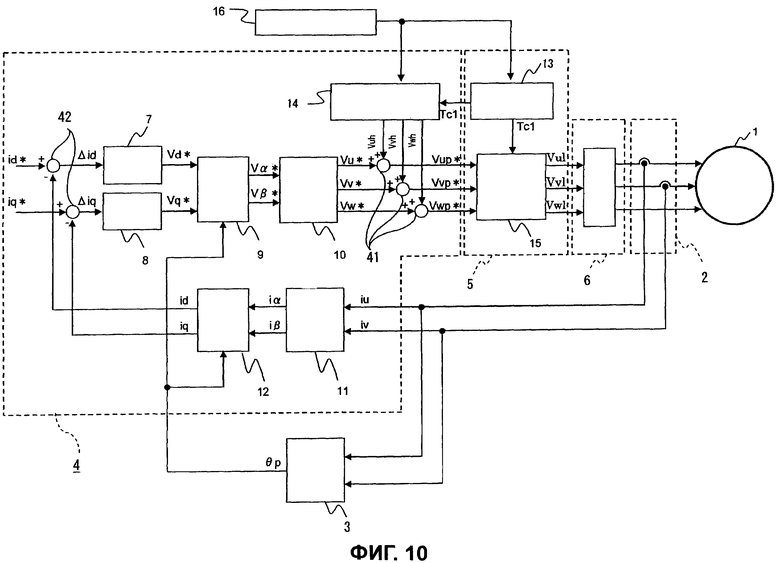
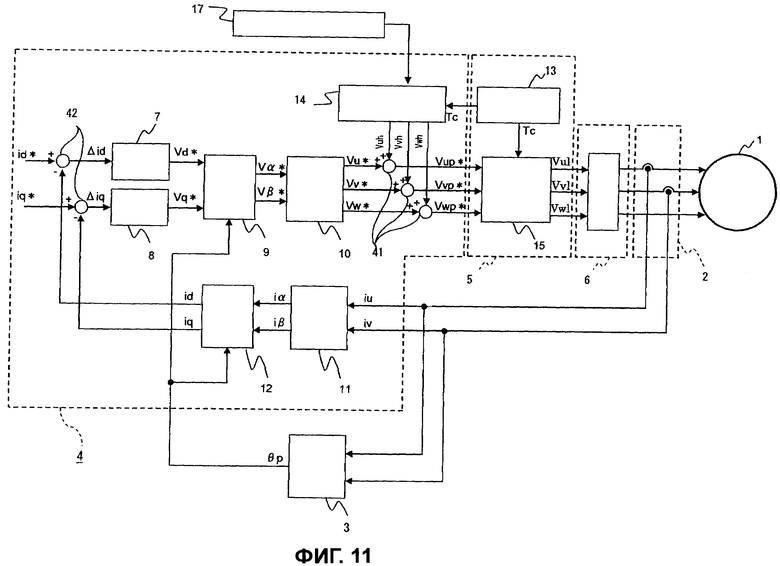
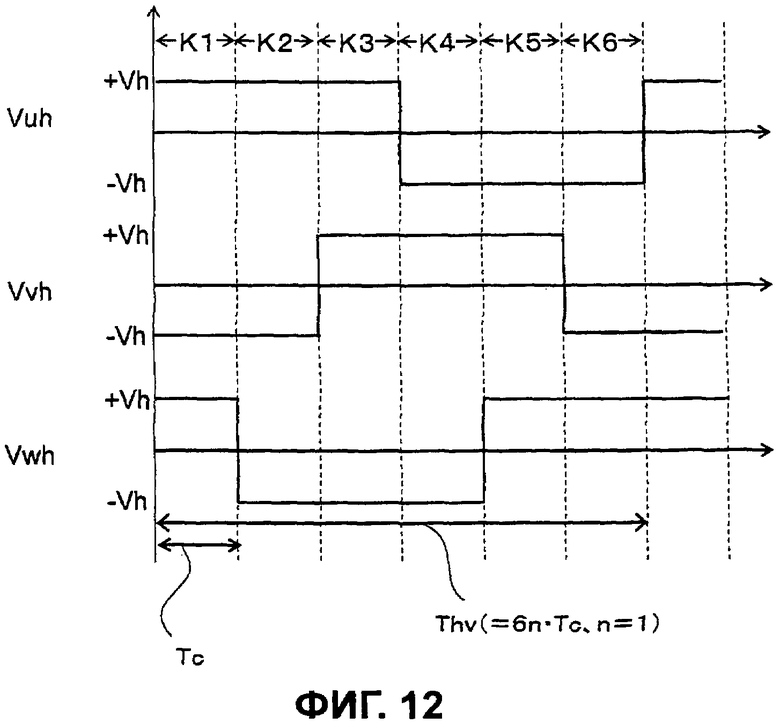
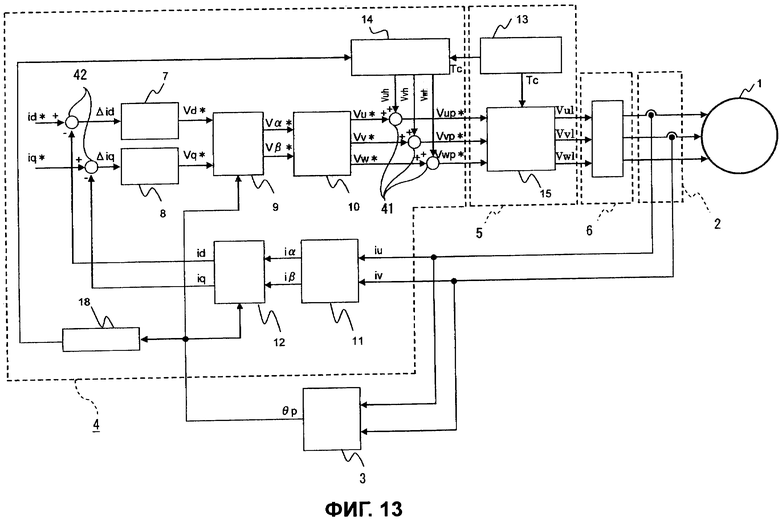
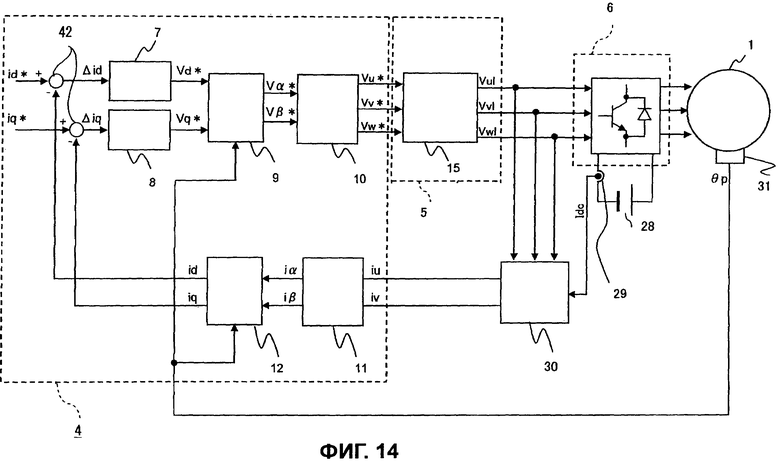
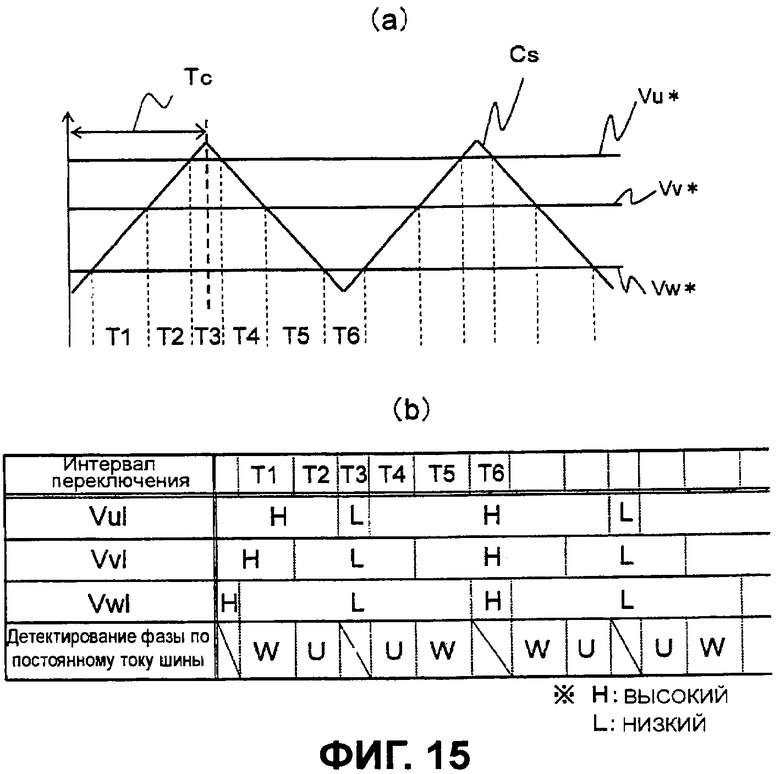
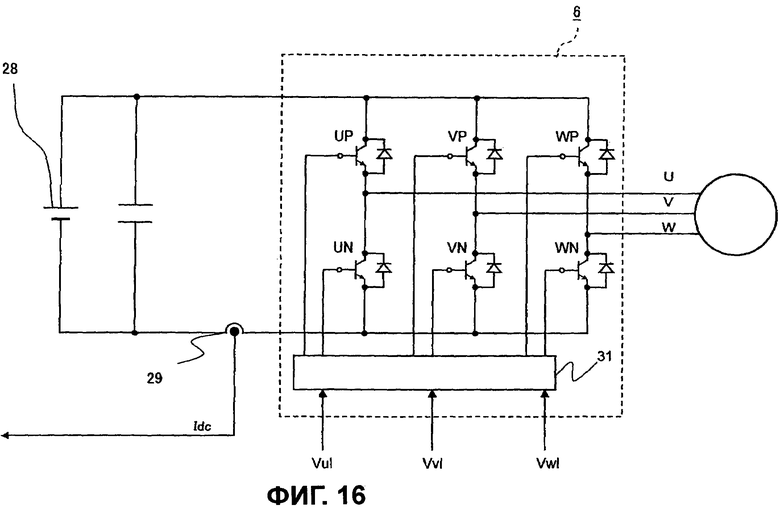
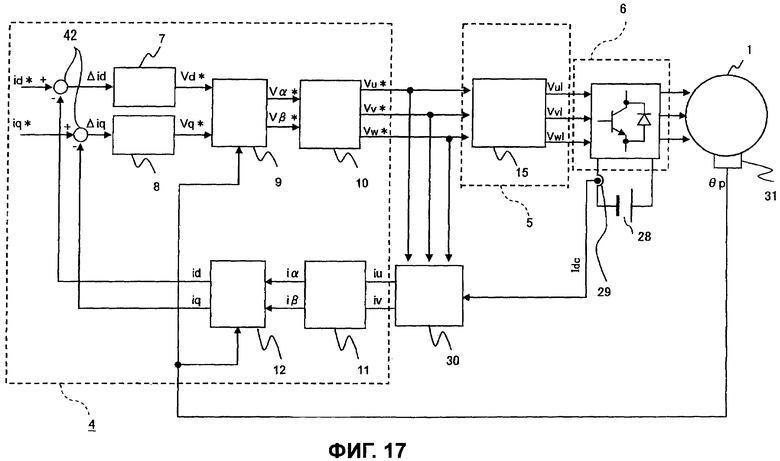
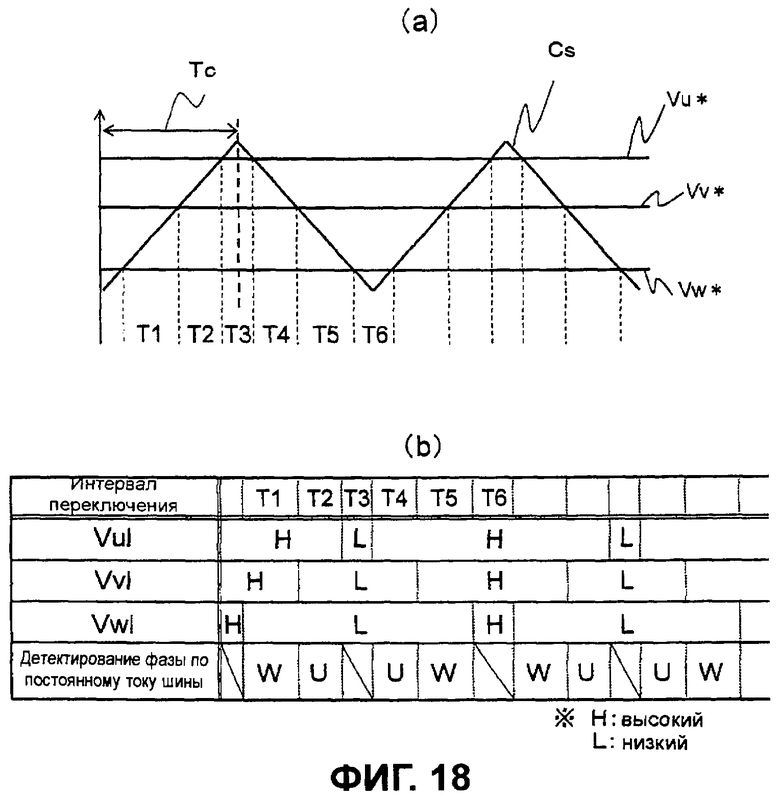
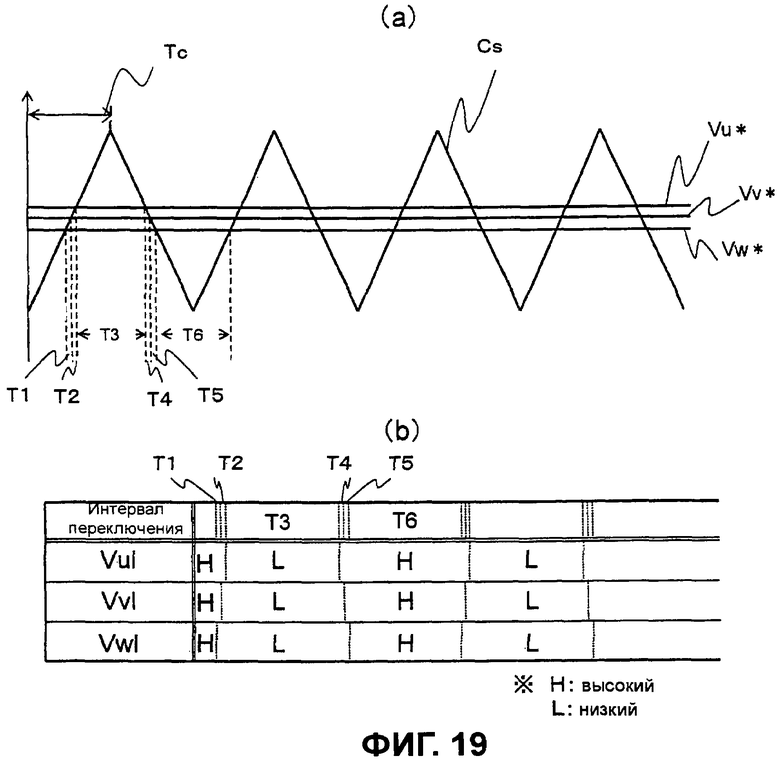
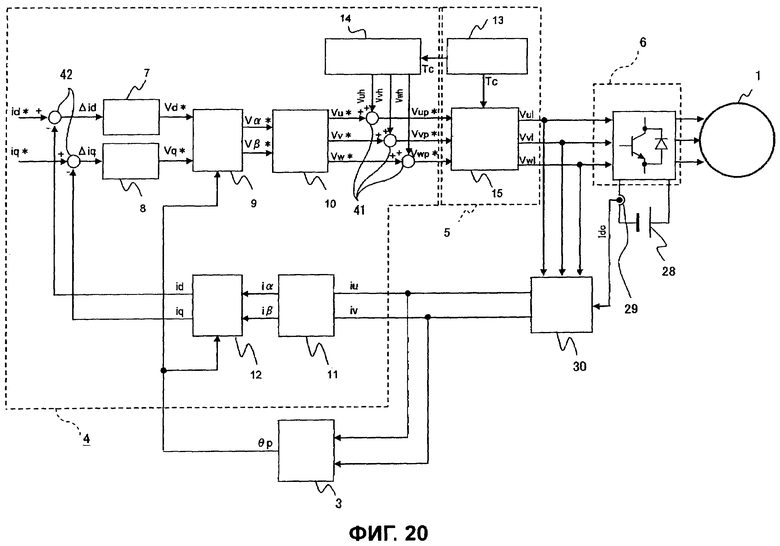
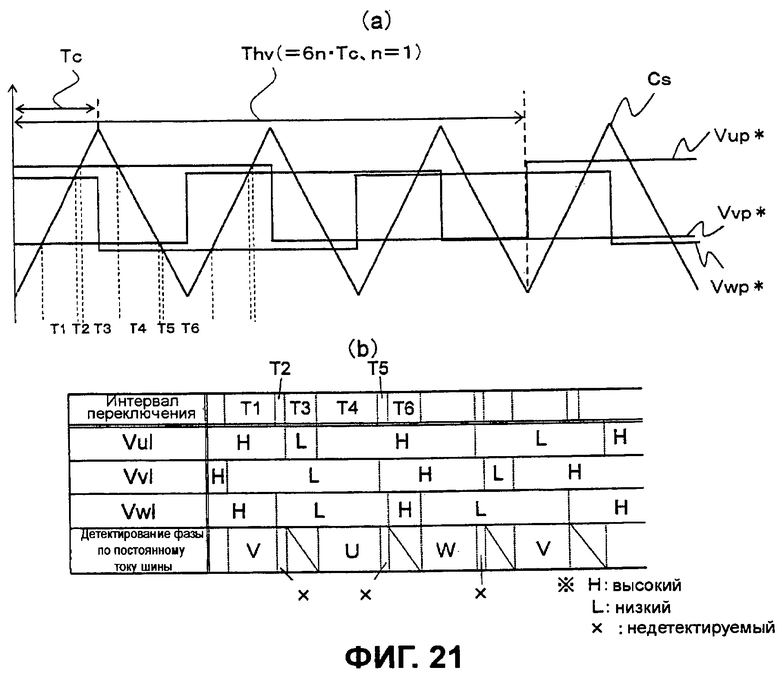
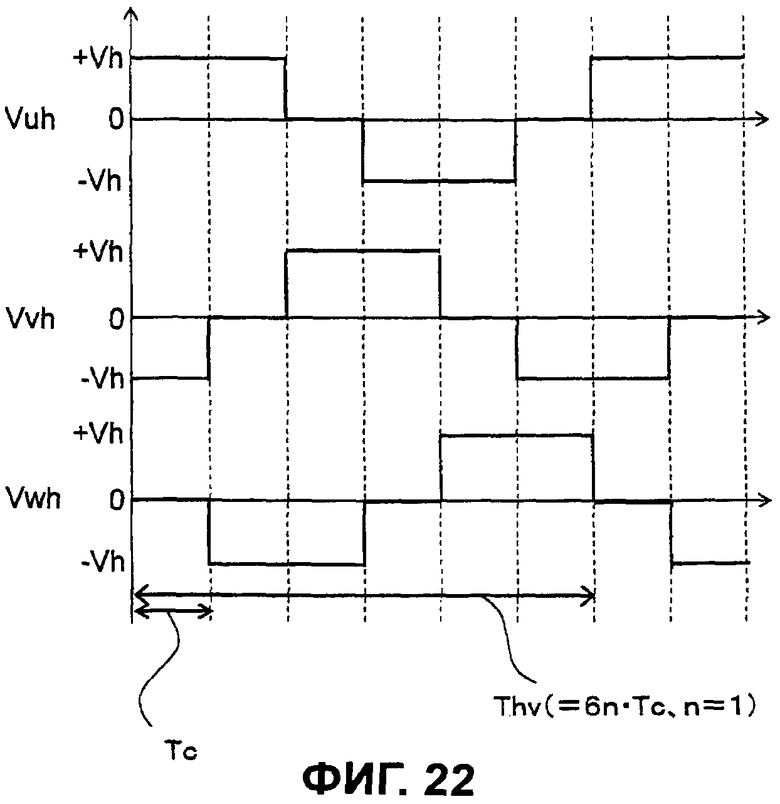
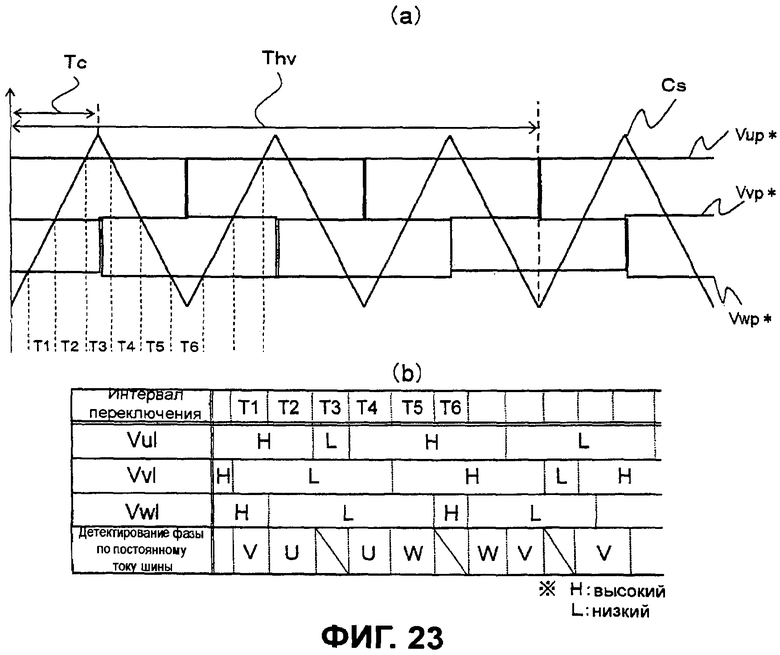
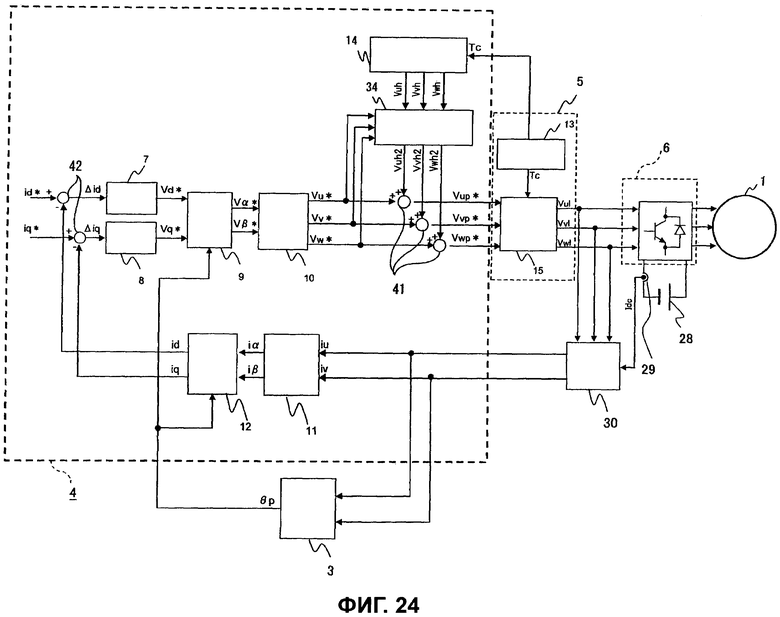
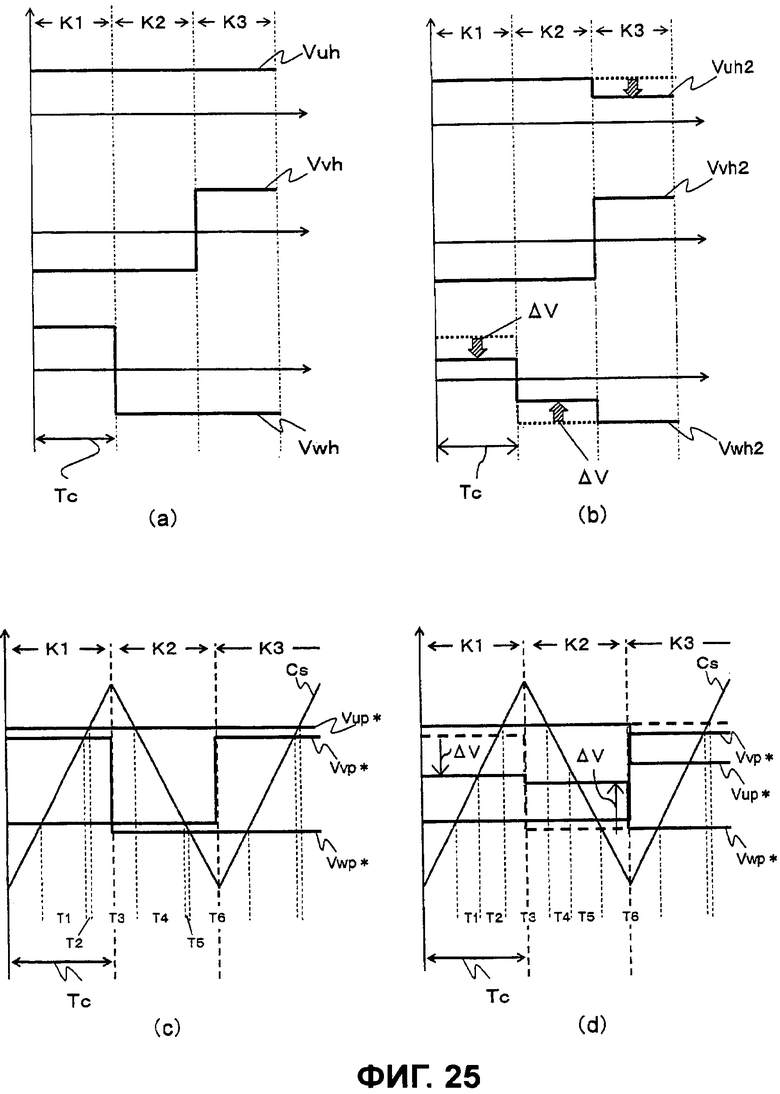
Изобретение относится к электротехнике, к контроллеру для управления вращением асинхронными, синхронными машинами и т.д. Технический результат состоит в обеспечении возможности получения информации о положении ротора без использования датчика его положения. Устройство содержит средство (2) детектирования токов вращающейся электрической машины, сформированных во вращающейся электрической машине (1), средство (3) оценки положения для выдачи оцененного положения θр в соответствии с токами вращающейся электрической машины; средство (4) управления для выдачи команд напряжения в соответствии с оцененным положением θр; средство (5) широтно-импульсной модуляции для выдачи логических сигналов, которые подвергнуты широтно-импульсной модуляции, в соответствии с командами напряжения и с циклом переключения, используемым для управления широтно-импульсной модуляцией; и средство (6) приложения напряжения переменного тока для приведения в действие вращающейся электрической машины в соответствии с логическими сигналами. Команды напряжения, выдаваемые средством (4) управления, получаются наложением на напряжения основных гармоник для приведения в действие вращающейся электрической машины, напряжений детектирования положения, каждое из которых имеет цикл, равный m-кратному значению цикла переключения, и которые отличны по фазе между соответственных фаз. 3 н. и 6 з.п. ф-лы, 25 ил.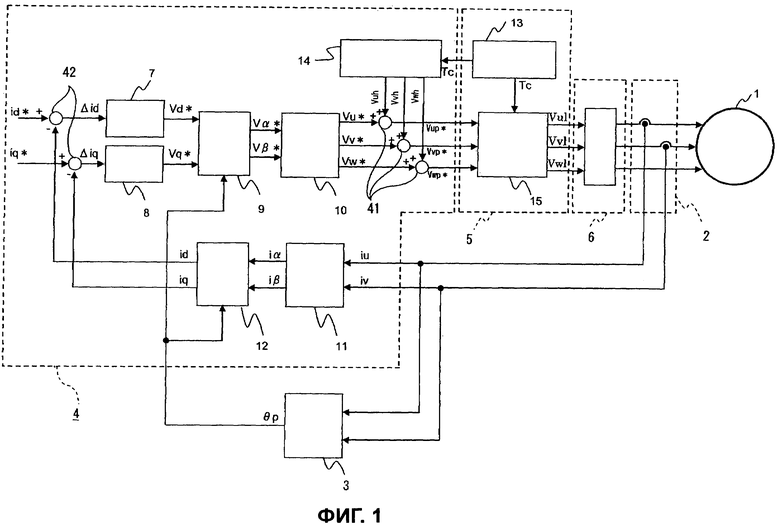
1. Контроллер вращающейся электрической машины, управляющий вращением вращающейся электрической машины (1), содержащий:
средство (2) детектирования тока для детектирования токов вращающейся электрической машины, протекающих во вращающуюся электрическую машину;
средство (3) оценки положения для оценки положения ротора в соответствии с токами вращающейся электрической машины, детектируемыми средством (2) детектирования тока;
средство (4) управления для выдачи команд напряжения в соответствии с положением ротора, оцененным средством (3) оценки положения;
средство (5) широтно-импульсной модуляции для выдачи логических сигналов, которые подвергнуты широтно-импульсной модуляции, на основании команд напряжения из средства (4) управления и цикла переключения, используемого для управления широтно-импульсной модуляцией; и
средство (6) приложения напряжения для приложения напряжений к вращающейся электрической машине (1) в соответствии с логическими сигналами, выданными средством (5) широтно-импульсной модуляции, при этом
команды напряжения, выдаваемые средством (4) управления, получаемые наложением, на напряжения основных гармоник для приведения в действие вращающейся электрической машины, напряжений детектирования положения, каждое из которых имеет цикл, равный m-кратному значению (m - целое число, равное трем или более) цикла переключения, и которые отличны по фазе, между соответствующих фаз.
2. Контроллер по п.1, в котором средство (4) управления включает в себя:
генератор (14) напряжения детектирования положения для формирования напряжений детектирования положения; и
сумматор (41) для наложения напряжений детектирования положения, выдаваемых генератором (14) напряжения детектирования положения, на напряжения основных гармоник и для выдачи результирующих величин в качестве команд напряжения в средство (5) широтно-импульсной модуляции.
3. Контроллер по п.2, в котором цикл каждого из напряжений детектирования положения, выдаваемых генератором (14) напряжения детектирования положения, устанавливается равным 6n-кратному значению (n - натуральное число) цикла переключения.
4. Контроллер по п.1, в котором средство (3) оценки положения выполнено с возможностью извлечения из токов вращающейся электрической машины, переменных токов детектирования положения, которые получены наложением, на напряжения основных гармоник, напряжений детектирования положения или измененных напряжений детектирования положения, и оценки положения ротора в соответствии с извлеченными переменными токами детектирования положения.
5. Контроллер по п.4, в котором средство (3) оценки положения включает в себя:
трехфазный/двухфазный конвертер (19) для выполнения трехфазного/двухфазного преобразования токов вращающейся электрической машины по трем фазам, причем токи протекают во вращающуюся электрическую машину;
преобразователь (20) Фурье для извлечения переменных токов детектирования положения из двухфазных токов, которые выдаются трехфазным/двухфазным конвертером (19);
умножитель (21) для возведения в квадрат каждого из переменных токов детектирования положения двух фаз, извлеченных преобразователем (20) Фурье; и
блок (23) вычисления положения для выдачи положения ротора в соответствии с соответственными выходными сигналами умножителя (21).
6. Контроллер по п.2, в котором средство (4) управления содержит блок (18) вычисления частоты вращения для вычисления частоты вращения вращающейся электрической машины (1) в соответствии с положением ротора, оцененным средством (3) оценки положения, и для побуждения генератора (14) напряжения детектирования положения прекращать формирование напряжений детектирования положения, когда частота вращения, рассчитанная блоком (18) вычисления частоты вращения, равна или больше заданного значения.
7. Контроллер вращающейся электрической машины, управляющий вращением вращающейся электрической машины (1), содержащий:
средство (6) приложения напряжения для приложения напряжений к вращающейся электрической машине (1)
средство (29) детектирования тока шины для детектирования тока шины, протекающего между средством (6) приложения напряжения и источником (28) напряжения постоянного тока, подающим питание постоянного тока на средство (6) приложения напряжения;
средство (3) оценки положения для оценки положения ротора в соответствии с токами вращающейся электрической машины, детектируемыми средством (29) детектирования тока шины;
средство (4) управления для выдачи команд напряжения в соответствии с положением ротора, оцененным средством (3) оценки положения;
средство (5) широтно-импульсной модуляции для выдачи логических сигналов, которые подвергнуты широтно-импульсной модуляции, на основании команд напряжения из средства (4) управления и цикла переключения, используемого для управления широтно-импульсной модуляцией; и
средство (30) вычисления тока вращающейся электрической машины для вычисления токов вращающейся электрической машины, протекающих во вращающуюся электрическую машину, в соответствии с током шины, детектируемым средством (29) детектирования тока шины, и обоими или любыми из логических сигналов и команд напряжения,
при этом указанное средство (6) приложения напряжения, предназначенное для приложения напряжения к вращающейся электрической машине (1) в соответствии с логическими сигналами, выданными средством (5) широтно-импульсной модуляции;
при этом средство (4) управления включает в себя:
генератор (14) напряжения для детектирования положения, предназначенный для формирования напряжений детектирования положения; и
сумматор (41) для наложения напряжений детектирования положения, выдаваемых генератором (14) напряжения детектирования положения, на напряжения основных гармоник и для выдачи результирующих величин в качестве команд напряжения в средство (5) широтно-импульсной модуляции, и
при этом указанное средство (4) управления предназначено для формирования команд напряжения путем наложения на напряжения основных гармоник для приведения в действие вращающейся электрической машины, напряжений детектирования положения, каждое из которых имеет цикл, равный m-кратному значению (m - целое число, равное трем или более) цикла переключения, и которые отличны по фазе, между соответствующих фаз.
8. Контроллер по п.7, в котором напряжения детектирования положения, сформированные генератором (14) напряжения детектирования положения, имеют, по меньшей мере, три амплитуды в течение периода цикла переключения.
9. Контроллер по п.7, в котором средство (4) управления включает в себя преобразователь (34) напряжения детектирования положения для изменения амплитуд напряжений детектирования положения, сформированных генератором (14) напряжения детектирования положения, в соответствии с напряжениями основных гармоник и формирует измененные напряжения детектирования положения, которые должны выдаваться в сумматор.
10. Контроллер вращающейся электрической машины, управляющий вращением вращающейся электрической машины (1), содержащий:
средство (2) детектирования тока для детектирования токов вращающейся электрической машины, протекающих во вращающуюся электрическую машину;
средство (3) оценки положения для оценки положения ротора в соответствии с токами вращающейся электрической машины, детектированными средством (2) детектирования тока;
средство (4) управления для выдачи команд напряжения в соответствии с положением ротора, оцененным средством (3) оценки положения;
средство (5) широтно-импульсной модуляции для выдачи логических сигналов, которые подвергнуты широтно-импульсной модуляции, на основании команд напряжения из средства (4) управления и цикла переключения, используемого для управления широтно-импульсной модуляцией; и
средство (6) приложения напряжения для приложения напряжений к вращающейся электрической машине (1) в соответствии с логическими сигналами, выданными средством (5) широтно-импульсной модуляции, при этом
напряжения, выдаваемые средством (6) приложения напряжения, получаемые наложением напряжений детектирования положения, каждое из которых имеет цикл, равный m-кратному значению (m - целое число, равное трем или более) цикла переключения, и которые отличны по фазе, между соответствующих фаз.
| JP 2002191188 А, 05.07.2002 | |||
| JP 2000102300 A, 07.04.2000 | |||
| WO 03015256 A, 20.02.2003 | |||
| US 5194794 A, 16.03.1993 | |||
| US 7235939 B2, 26.06.2007 | |||
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОСТОЯННЫМИ МАГНИТАМИ И ЭНЕРГОСБЕРЕГАЮЩИМ УПРАВЛЕНИЕМ | 1999 |
|
RU2249904C2 |
| Устройство для управления возбуждением бесщеточной электрической машины | 1980 |
|
SU974545A1 |

