Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству контроля помех.
Уровень техники
[0002] Известно устройство помощи вождению для прогнозирования риска соприкосновения между рассматриваемым транспортным средством и препятствием около рассматриваемого транспортного средства, в случае, когда рассматриваемое транспортное средство движется с характером вождения согласно, по меньшей мере, одному или более вариантам нормативного поведения, причем варианты нормативного поведения являются вариантами для нормативного характера вождения рассматриваемого транспортного средства для ситуации вокруг рассматриваемого транспортного средства (см. патентную литературу 1).
[0003] Предположим, что присутствует препятствие, движущееся по направлению к рассматриваемому транспортному средству с постоянным ускорением в слепой зоне для рассматриваемого транспортного средства, патентная литература 1 вычисляет потенциальный риск столкновения и определяет характер вождения на основе риска столкновения.
Список ссылок
Патентная литература
[0004] Патентная литература 1: Публикация японской патентной заявки № 2011-096105
Сущность изобретения
[0005] В патентной литературе 1, однако, пропорция слепой зоны для рассматриваемого транспортного средства относительно области на карте, которая влияет на риск столкновения, не принимается во внимание. Таким образом, может быть определен характер вождения, чрезмерно фокусирующийся на безопасности, и это может приносить дискомфорт окружающим людям.
[0006] Настоящее изобретение выполнено в свете вышеописанных проблем. Задачей настоящего изобретения является предоставление устройства контроля помех, которое сдерживает характер вождения, значительно снижая риск столкновения с движущимся объектом.
[0007] Устройство контроля помех согласно аспекту настоящего изобретения вычисляет пропорцию слепой зоны для рассматриваемого транспортного средства относительно критерия обнаружения тщательного наблюдения, который задается в одной или более областей тщательного наблюдения, в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться.
Краткое описание чертежей
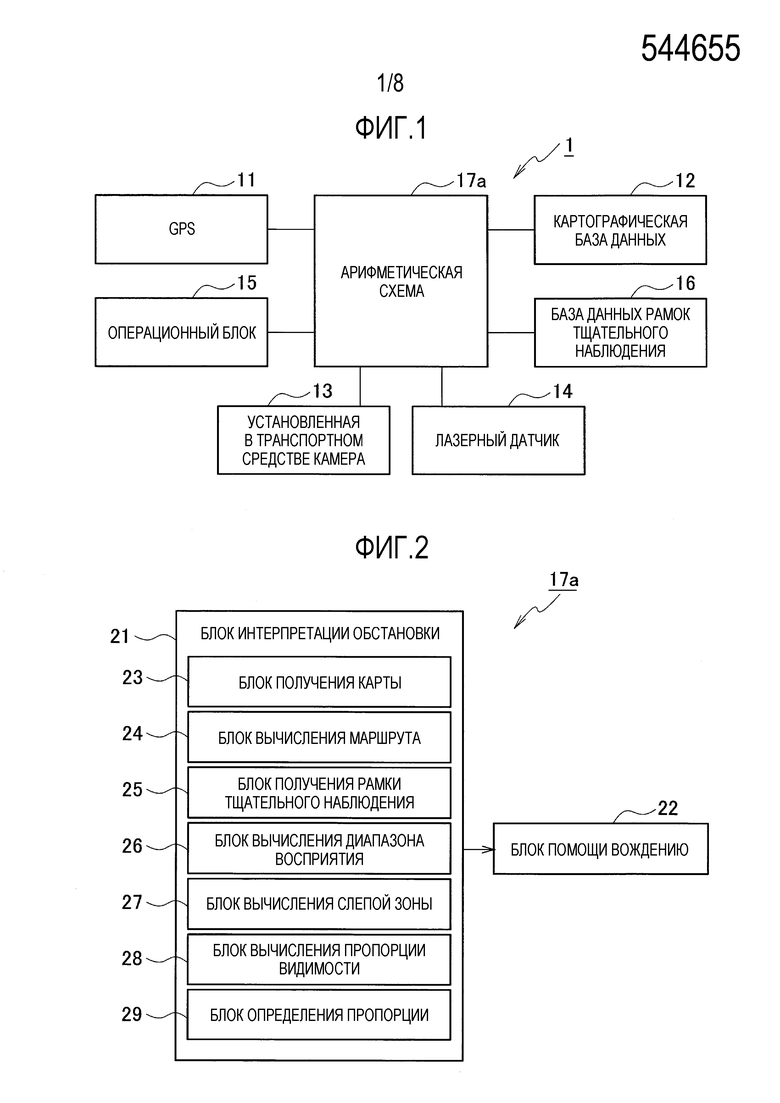
[0008] Фиг. 1 - это блок-схема, показывающая общую конфигурацию устройства 1 контроля помех согласно первому варианту осуществления.
Фиг. 2 - это блок-схема, показывающая множество схем обработки, сконфигурированных посредством арифметической схемы 17a.
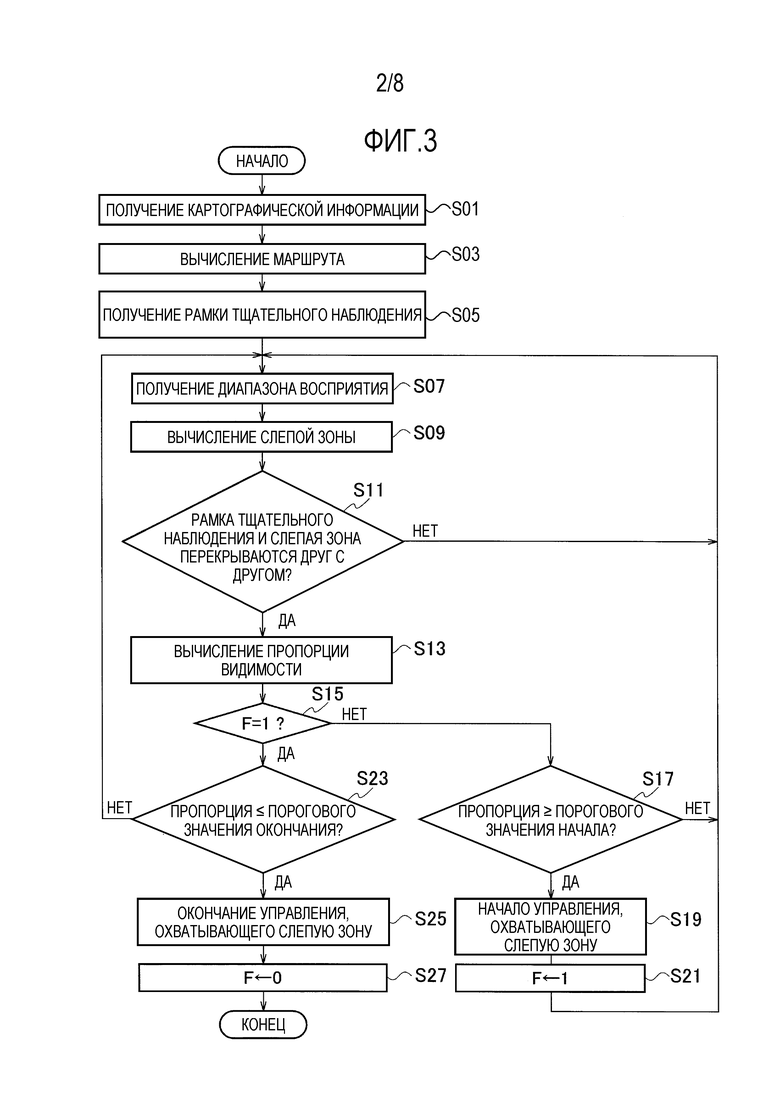
Фиг. 3 - это блок-схема последовательности операций, показывающая пример способа контроля помех, который использует устройство 1 контроля помех, показанное на фиг. 1 и 2.
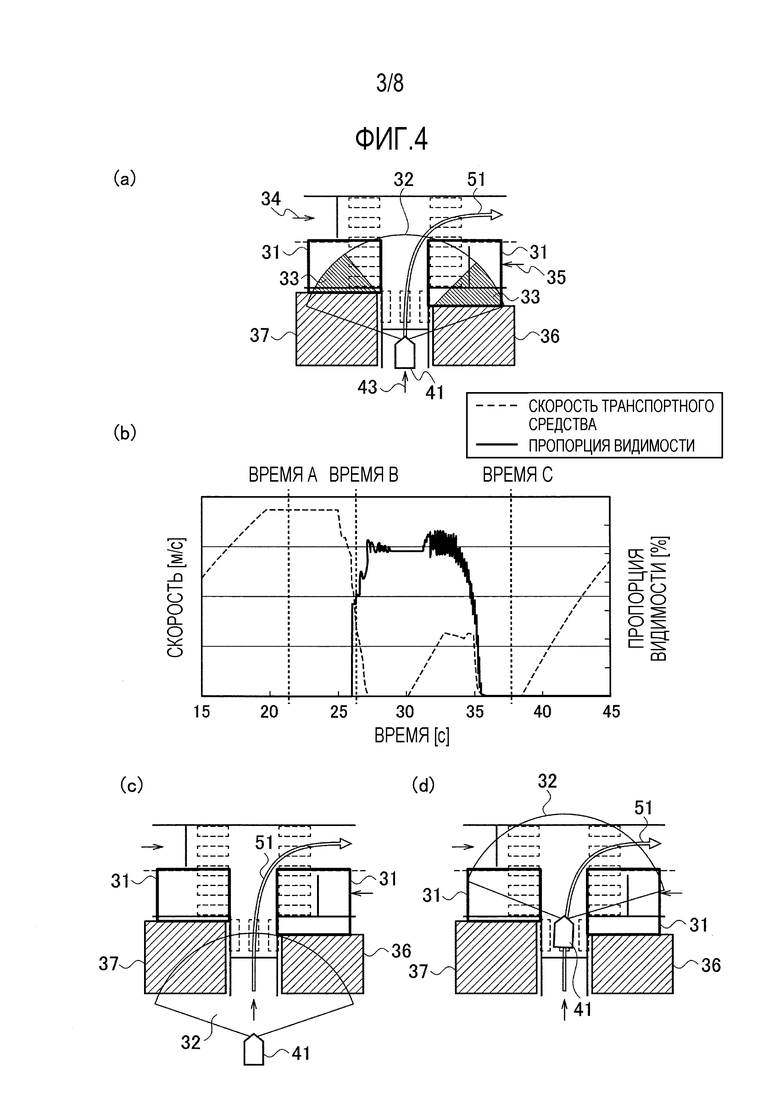
Фиг. 4 показывает пример, когда критерий обнаружения тщательного наблюдения является рамкой 31 тщательного наблюдения, окружающей внешний периметр области тщательного наблюдения. Фиг. 4(a) - это вид сверху, показывающий позицию рассматриваемого транспортного средства 41 во время B, показанное на фиг. 4(b). Фиг. 4(b) - это график, показывающий временное изменение скорости рассматриваемого транспортного средства 41 и пропорцию, вычисленную посредством блока 28 вычисления пропорции видимости. Фиг. 4(c) показывает позицию рассматриваемого транспортного средства 41 во время A, показанное на фиг. 4(b). Фиг. 4(d) показывает позицию рассматриваемого транспортного средства 41 во время C, показанное на фиг. 4(b).
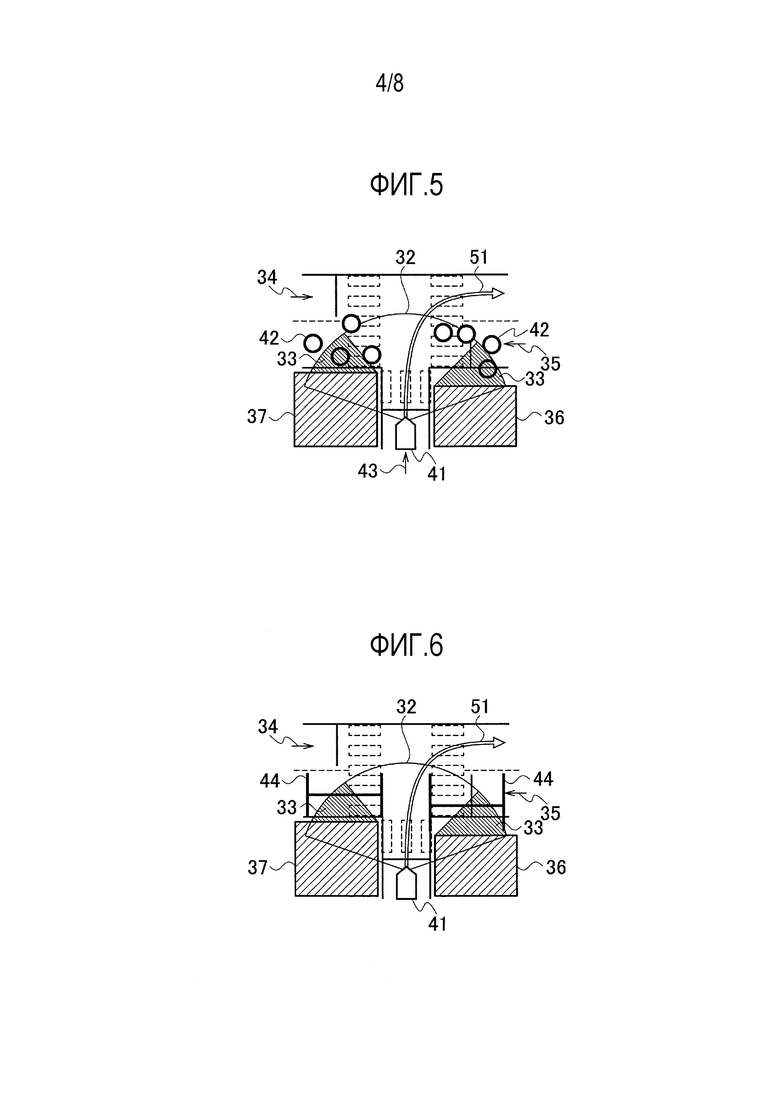
Фиг. 5 - это вид сверху, показывающий пример группы точек тщательного наблюдения, включающей в себя множество точек тщательного наблюдения.
Фиг. 6 - это вид сверху, показывающий пример линейного расслоения, включающего в себя один или более отрезков 44 линии тщательного наблюдения.
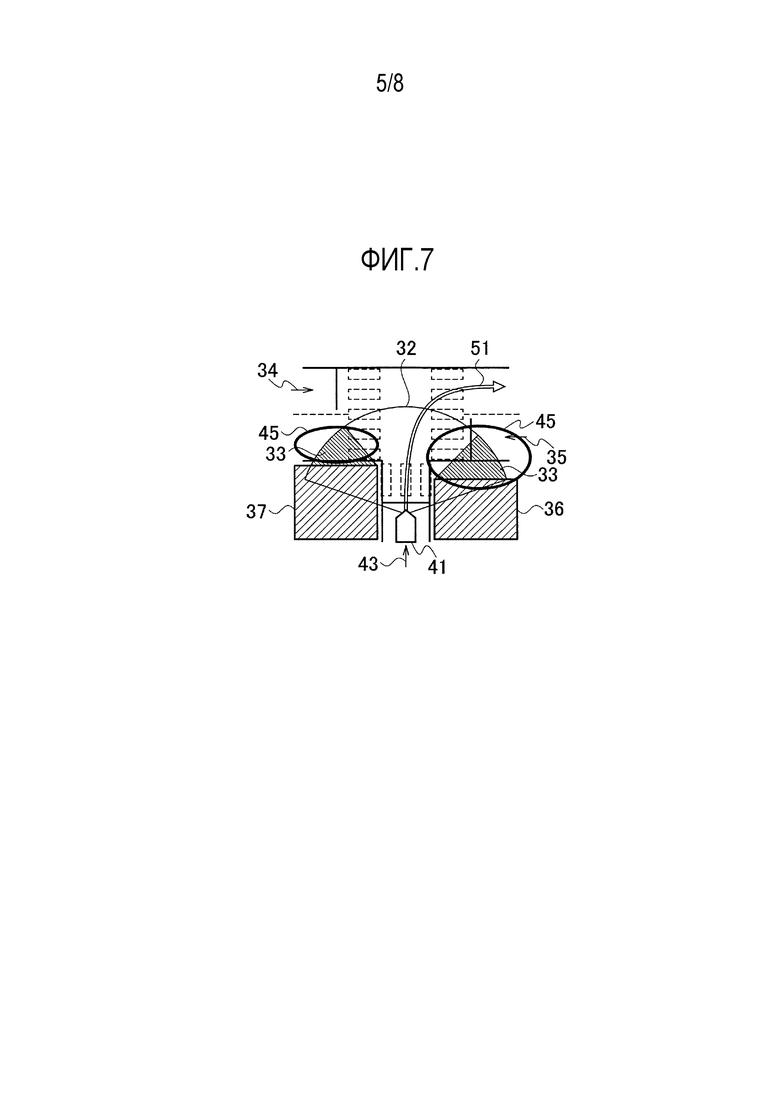
Фиг. 7 - это вид сверху, показывающий пример рамки 31 тщательного наблюдения в форме овала 45.
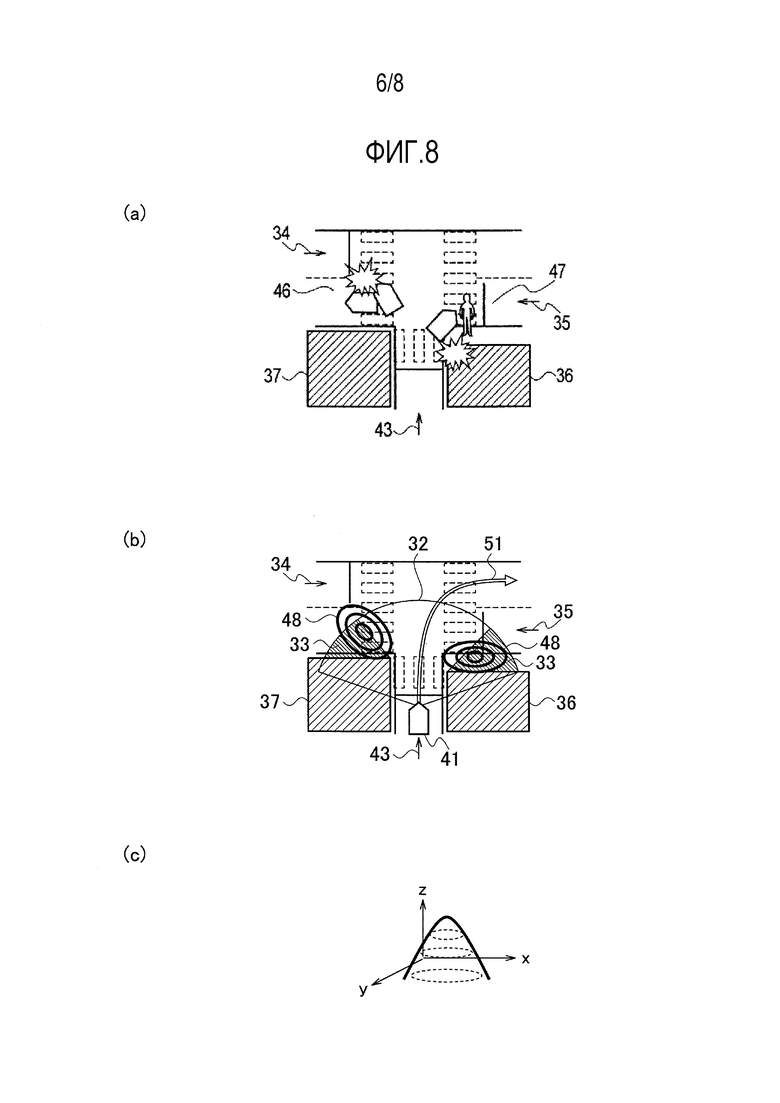
Фиг. 8(a) - это вид сверху, показывающий пример данных (46, 47) о прошлых авариях. Фиг. 8(b) - это вид сверху, показывающий пример рамки 48 тщательного наблюдения, к которой применяется весовой коэффициент. Фиг. 8(c) - это график, показывающий гауссово распределение вероятности Z аварии в качестве примера весового коэффициента.
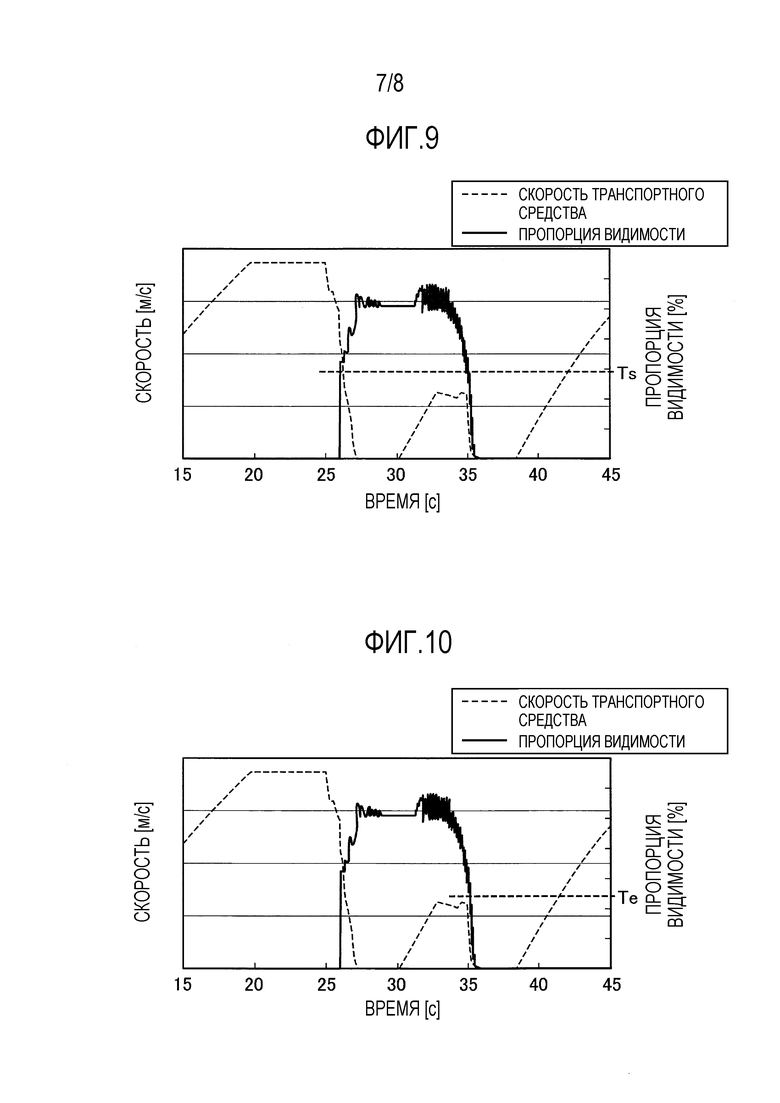
Фиг. 9 - это график, показывающий пример порогового значения (Ts) начала, которое является критерием для определения того, начинать ли практическое поведение для слепой зоны.
Фиг. 10 - это график, показывающий пример порогового значения (Te) для окончания, которое является критерием для определения того, заканчивать ли практическое поведение для слепой зоны.
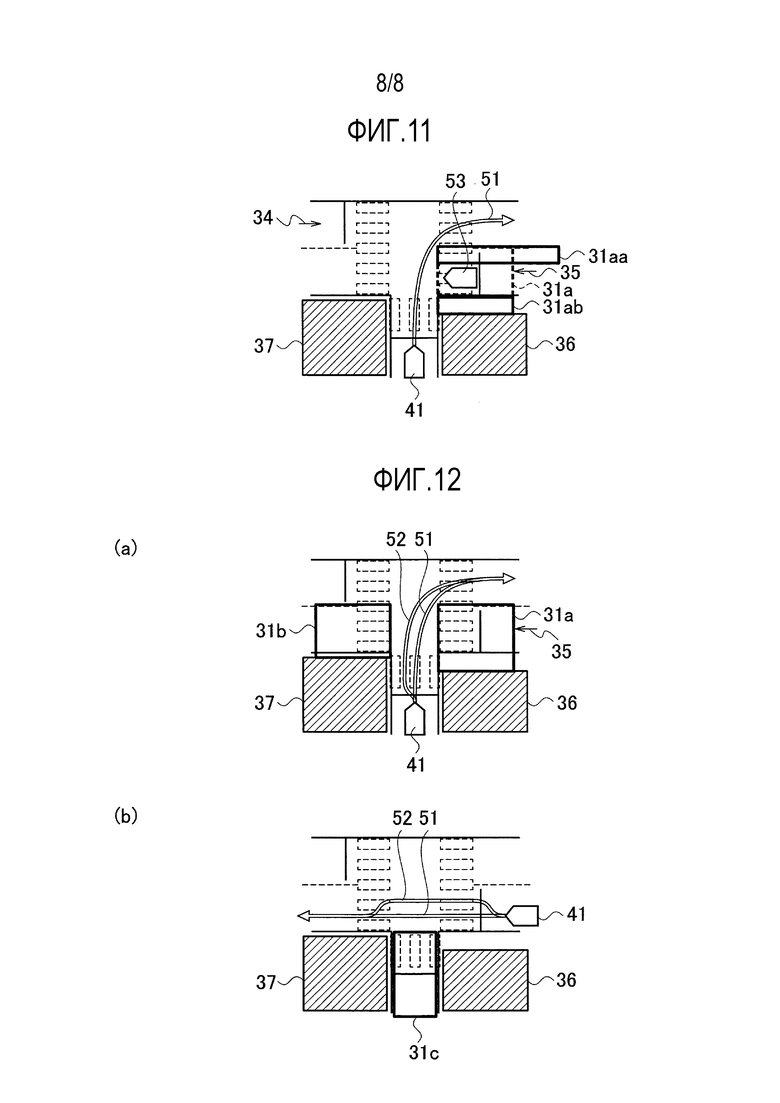
Фиг. 11 - это вид сверху, показывающий пример рамок (31aa, 31ab) тщательного наблюдения, которые задаются в случае, когда движущийся объект (другое транспортное средство 53) присутствует в области 31a тщательного наблюдения.
Фиг. 12 - это вид сверху, показывающий пример управления, охватывающего слепую зону, для запланированного маршрута 51 движения рассматриваемого транспортного средства 41. Фиг. 12(a) показывает управление, охватывающее слепую зону, для поворота направо на перекрестке. Фиг. 12(b) показывает управление, охватывающее слепую зону, для движения прямо через перекресток.
Подробное описание вариантов осуществления
[0009] Далее, обращаясь к чертежам, варианты осуществления настоящего изобретения описываются подробно.
[0010] [Первый вариант осуществления]
Обращаясь к фиг. 1 и 4, описывается общая конфигурация устройства 1 контроля помех согласно первому варианту осуществления. Устройство 1 контроля помех вычисляет пропорцию слепой зоны 33 для рассматриваемого транспортного средства 41 относительно критерия (31) обнаружения тщательного наблюдения, заданного на карте, определяет практическое поведение рассматриваемого транспортного средства 41 на основе этой пропорции и выполняет помощь вождению для рассматриваемого транспортного средства 41 согласно этому практическому поведению. Критерий (31) обнаружения тщательного наблюдения является критерием, заданным в одной или более областях тщательного наблюдения, в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться, пока рассматриваемое транспортное средство 41 движется. Критерий (31) обнаружения тщательного наблюдения иллюстрируется с одной или более рамками (рамками 31 тщательного наблюдения; фиг. 4, 7, 8), точками (точками тщательного наблюдения: фиг. 5), отрезками линий (отрезками линий тщательного наблюдения: фиг. 6) или сочетанием рамки, точки и отрезка линии. В дополнение к слепой зоне для водителя рассматриваемого транспортного средства 41, слепая зона 33 для рассматриваемого транспортного средства 41 также включает в себя слепую зону для камеры или лазерного датчика, установленного в рассматриваемом транспортном средстве. Практическое поведение рассматриваемого транспортного средства 41, по меньшей мере, включает в себя практическое поведение, которое учитывает слепую зону 33 для рассматриваемого транспортного средства 41 (практическое поведение для слепой зоны) и обычное практическое поведение, которое не учитывает слепую зону 33 для рассматриваемого транспортного средства 41 (обычное практическое поведение).
[0011] Как показано на фиг. 1, устройство 1 контроля помех включает в себя GPS 11, картографическую базу данных 12, установленную в транспортном средстве камеру 13 и лазерный датчик 14, операционный блок 15, базу данных 16 рамок тщательного наблюдения и арифметическую схему 17a. GPS 11 является примером датчика позиции рассматриваемого транспортного средства, который обнаруживает текущую позицию и ориентацию рассматриваемого транспортного средства. GPS 11 принимает электрическую волну от спутника NAVSTAR в системе глобального позиционирования и определяет позицию и ориентацию рассматриваемого транспортного средства в реальном времени. Датчик позиции рассматриваемого транспортного средства может быть датчиком угла поворота вокруг вертикальной оси и датчиком скорости транспортного средства для выполнения одометрии (оценки собственной позиции) или может быть использован в сочетании с GPS 11.
[0012] Картографическая база данных 12 является примером устройства хранения карт для хранения картографических данных, показывающих формы дорог, по которым рассматриваемое транспортное средство может двигаться. База данных 16 рамок тщательного наблюдения хранит данные о позиции и размере рамки 31 тщательного наблюдения (см. фиг. 4), которая является примером критерия обнаружения тщательного наблюдения, на карте. Этот вариант осуществления показывает пример хранения картографических данных и данных о рамке тщательного наблюдения в различных базах данных, соответственно; однако, он не ограничивается этим. Картографические данные, в которых рамка тщательного наблюдения задана заранее, могут быть сохранены в одной базе данных. Критерий обнаружения тщательного наблюдения, включающий в себя рамку тщательного наблюдения, задается в одной или более областях тщательного наблюдения на карте, в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться. "Движущийся объект" включает в себя транспортное средство и легковое транспортное средство, которые движутся или стоят на дороге, также как и пешехода.
[0013] Установленная в транспортном средстве камера 13 и лазерный датчик 14 являются примером датчика препятствия, который обнаруживает позиции препятствий вокруг рассматриваемого транспортного средства. Установленная в транспортном средстве камера 13 устанавливается в рассматриваемом транспортном средстве и захватывает изображение окружающей обстановки для рассматриваемого транспортного средства, чтобы получать изображение окружающей обстановки. Арифметическая схема 17a анализирует изображение окружающей обстановки, чтобы определять присутствие или отсутствие и позицию препятствия. В дополнение к зданиям 36, 37, присутствующим вокруг рассматриваемого транспортного средства (см. фиг. 4), стене, дереву, дорожному знаку, которые расположены неподвижно на земле, "препятствие" также включает в себя вышеупомянутый движущийся объект. Лазерный датчик 14 излучает импульсы лазерного света и обнаруживает свет, отраженный от препятствия, тем самым, определяя расстояние и направление от рассматриваемого транспортного средства до препятствия. Операционный блок 15 включает в себя сенсорную панель, переключатель рулевого управления и т.п., которые являются элементами для приема инструкции от водителя рассматриваемого транспортного средства, размещенные на панели автопилота и в приборной панели.
[0014] Арифметическая схема 17a использует информацию о позиции рассматриваемого транспортного средства, карте, препятствии и рамке тщательного наблюдения, чтобы вычислять пропорцию слепой зоны 33 для рассматриваемого транспортного средства 41 относительно рамки 31 тщательного наблюдения. Затем, арифметическая схема 17a определяет практическое поведение рассматриваемого транспортного средства 41 на основе этой пропорции и выполняет последовательность вычислительной обработки для выполнения помощи вождению для рассматриваемого транспортного средства 41. Например, арифметическая схема 17a является микрокомпьютером общего назначения, включающим в себя CPU, RAM, ROM, память и схему управления вводом/выводом. Компьютерная программа, в которой описывается последовательность арифметических процессов, устанавливается в микрокомпьютере заранее. Исполняя компьютерную программу, микрокомпьютер конструирует множество схем обработки для исполнения вышеупомянутой последовательности арифметических процессов. Множество схем обработки, сконструированных посредством арифметической схемы 17a, описываются позже со ссылкой на фиг. 2.
[0015] Обращаясь к фиг. 2 и 4, будут предоставлены описания для множества схем обработки, сконструированных посредством арифметической схемы 17a. В качестве множества схем обработки арифметическая схема 17a включает в себя блок 21 интерпретации обстановки и блок 22 помощи вождению. Блок 21 интерпретации обстановки вычисляет пропорцию слепой зоны для рассматриваемого транспортного средства и определяет практическое поведение рассматриваемого транспортного средства на основе этой пропорции.
[0016] Согласно практическому поведению рассматриваемого транспортного средства, определенному посредством блока 21 интерпретации обстановки, блок 22 помощи вождению выполняет помощь вождению для рассматриваемого транспортного средства. В частности, помощь вождению может быть автономным управлением вождением, при котором блок 22 помощи вождению приводит в действие различные исполнительные механизмы, так что блок 22 помощи вождению проактивно выполняет всю операцию вождения, включающую в себя работу системы рулевого управления и работу педалей. Альтернативно, операция вождения, которую водитель должен выполнять, может быть указана посредством пяти чувств, таких как слух, зрение и осязание водителя.
[0017] Блок 21 интерпретации обстановки включает в себя блок 23 получения карты, блок 24 вычисления маршрута, блок 25 получения рамки тщательного наблюдения, блок 26 вычисления диапазона восприятия, блок 27 вычисления слепой зоны, блок 28 вычисления пропорции видимости (блок вычисления пропорции) и блок 29 определения пропорции (блок определения поведения).
[0018] Блок 24 вычисления маршрута вычисляет запланированный маршрут 51 движения (см. фиг. 4) от текущей позиции рассматриваемого транспортного средства, определенной посредством GPS 11, до пункта назначения, который принимает операционный блок 15. Отметим, что, в вариантах осуществления, предоставляется описание для случая, когда устройство 1 контроля помех имеет функцию вычисления запланированного маршрута движения самостоятельно. Однако, устройство 1 контроля помех может получать запланированный маршрут 51 движения, вычисленный посредством другого устройства, извне.
[0019] Блок 23 получения карты получает картографические данные согласно запланированному маршруту 51 движения из картографической базы данных 12. Цифровая карта может быть использована в качестве картографических данных. Цифровая карта включает в себя информацию о бордюре, указывающую позицию бордюра, или информацию о дорожной сети. Информация о бордюре используется для вычисления области с возможностью движения для рассматриваемого транспортного средства. Информация о дорожной сети используется для поиска области, где рассматриваемое транспортное средство 41 может двигаться в позже упомянутое время.
[0020] Блок 25 получения рамки тщательного наблюдения получает данные о позиции и размере рамки 31 тщательного наблюдения на карте из базы данных 16 рамок тщательного наблюдения. Блок 23 получения карты использует полученные данные о рамке 31 тщательного наблюдения, чтобы формировать картографические данные, в которых задается рамка 31 тщательного наблюдения. Таким образом, блок 23 получения карты может получать картографические данные с рамкой 31 тщательного наблюдения, заданной в одной или более областях тщательного наблюдения, в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться.
[0021] На основе текущей позиции и ориентации рассматриваемого транспортного средства, а также картографических данных, блок 26 вычисления диапазона восприятия вычисляет диапазон 32 восприятия (см. фиг. 4) на карте. "Диапазон 32 восприятия" представляет диапазон, в котором установленная в транспортном средстве камера 13 и лазерный датчик 14 могут обнаруживать препятствие, если не существует препятствия около рассматриваемого транспортного средства 41. Диапазон 32 восприятия может быть вычислен для каждого из установленной в транспортном средстве камеры 13 и лазерного датчика 14, в то время как диапазон 32 восприятия определяется по прилагаемым позициям и углам установленной в транспортном средстве камеры 13 и лазерного датчика 14 относительно рассматриваемого транспортного средства 41. Таким образом, диапазон 32 восприятия на карте может быть вычислен на основе текущей позиции и ориентации рассматриваемого транспортного средства 41, а также картографических данных.
[0022] Блок 27 вычисления слепой зоны вычисляет присутствие или отсутствие слепой зоны 32 для рассматриваемого транспортного средства 41, созданной препятствием, и диапазон слепой зоны 33. В слепых зонах для рассматриваемого транспортного средства 41, созданных препятствием (например, зданиями 36, 37), блок 27 вычисления слепой зоны обнаруживает часть, которая перекрывается с диапазоном 32 восприятия, в качестве слепой зоны 33 для рассматриваемого транспортного средства.
[0023] Блок 28 вычисления пропорции видимости вычисляет пропорцию слепой зоны 33 для рассматриваемого транспортного средства 41 относительно рамки 31 тщательного наблюдения (критерия обнаружения тщательного наблюдения). Например, относительно всей площади рамки 31 тщательного наблюдения, блок 28 вычисления пропорции видимости вычисляет пропорцию площади рамки тщательного наблюдения, которая перекрывается со слепой зоной 33 для рассматриваемого транспортного средства.
[0024] На основе пропорции, вычисленной посредством блока 28 вычисления пропорции видимости, блок 29 определения пропорции определяет практическое поведение рассматриваемого транспортного средства 41. В частности, на основе вышеупомянутой пропорции, блок 29 определения пропорции выбирает либо практическое поведение для слепой зоны, либо обычное практическое поведение.
[0025] Обращаясь к фиг. 4, описывается пример, когда критерий обнаружения тщательного наблюдения является рамками 31 тщательного наблюдения, окружающими внешние периметры областей тщательного наблюдения. Фиг. 4(a), 4(c) и 4(d) показывают рассматриваемое транспортное средство 41, движущееся по запланированному маршруту 51 движения, которое поворачивает направо на перекрестке дороги с тремя ответвлениями, где три дороги сходятся. Поскольку здания 36 и 37 в качестве препятствия стоят по обеим сторонам от рассматриваемого транспортного средства 41, въезжающего на перекресток с направления 43 движения, слепые зоны 33 для рассматриваемого транспортного средства 41 создаются зданиями 36 и 37. Как описано выше, слепые зоны 33 вычисляются посредством блока 27 вычисления слепой зоны. Блок 25 получения рамки тщательного наблюдения получает рамки 31 тщательного наблюдения, в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться для запланированного маршрута 51 движения, поворачивающего направо на перекрестке. Что касается площади рамки 31 тщательного наблюдения, блок 28 вычисления пропорции видимости вычисляет пропорцию каждой площади для рамок 31 тщательного наблюдения, которая перекрывается с соответствующей слепой зоной 33 для рассматриваемого транспортного средства 41. Как показано на фиг. 4(a), рамки 31 тщательного наблюдения задаются в областях, которые имеют тенденцию быть слепыми зонами 33 для рассматриваемого транспортного средства 41 из-за зданий 36 и 37.
[0026] Во время A, как показано на фиг. 4(c), поскольку рамки 31 тщательного наблюдения и диапазон 32 восприятия не перекрываются друг с другом, блок 28 вычисления пропорции видимости не выполняет операцию вычисления пропорции; таким образом, пропорция равна 0%. Блок 22 помощи вождению выполняет обычное практическое поведение. Когда рамки 31 тщательного наблюдения и диапазон 32 восприятия начинают перекрывать друг друга, блок 28 вычисления пропорции видимости начинает вычисление пропорции. Затем, во время B, как показано на фиг. 4(a), пропорция каждой площади для рамок 31 тщательного наблюдения, перекрывающихся со слепой зоной 33 для рассматриваемого транспортного средства 41, становится больше предварительно определенного значения (например, 20%). При этом, блок 29 определения пропорции выбирает практическое поведение для слепой зоны в качестве практического поведения рассматриваемого транспортного средства 41. Дополнительно, во время C, как показано на фиг. 4(d), не существует слепой зоны, созданной в областях, где рамки 31 тщательного наблюдения и диапазон 32 восприятия перекрывают друг друга. Другими словами, транспортное средство может полностью осматривать рамки 31 тщательного наблюдения. Таким образом, что касается площади рамок 31 тщательного наблюдения, пропорция каждой площади для рамок 31 тщательного наблюдения, перекрывающихся со слепой зоной 33 для рассматриваемого транспортного средства, становится равной 0%. Блок 29 определения пропорции тогда выбирает обычное практическое поведение в качестве практического поведения рассматриваемого транспортного средства 41. Таким образом, с помощью рамки 31 тщательного наблюдения и диапазона 32 восприятия, пропорция перекрывания слепой зоны рассматриваемого транспортного средства и рамки 31 тщательного наблюдения может быть определена количественно как степень риска. Это способствует представлению в цифровом виде риска столкновения с движущимся объектом.
[0027] Во время A скорость транспортного средства для рассматриваемого транспортного средства 41 является скоростью, основанной на обычном практическом поведении. Во время B, когда практическое поведение переключается на практическое поведение для слепой зоны, рассматриваемое транспортное средство 41 однократно замедляется до нуля. После этого, рассматриваемое транспортное средство 41 медленно двигается до тех пор, пока пропорция видимости не уменьшится до меньшей или равной предварительно определенному значению, и движется в позицию, где рассматриваемое транспортное средство 41 может полностью осматривать рамки 31 тщательного наблюдения. Возвращаясь к обычному практическому поведению, рассматриваемое транспортное средство 41 временно останавливается и затем возобновляет действие для поворота направо.
[0028] Обращаясь к фиг. 3, описывается пример способа контроля помех согласно первому варианту осуществления. В процедуре на фиг. 3, после того, как устройство контроля помех активируется, способ контроля помех выполняется повторяющимся образом по предварительно определенному циклу и заканчивается с завершением работы устройства контроля помех.
[0029] На этапе S01 блок 23 получения карты получает картографические данные из картографической базы данных 12. Обработка переходит к этапу S03; на основе информации о позиции и пункте назначения для рассматриваемого транспортного средства 41, блок 24 вычисления маршрута вычисляет запланированный маршрут 51 движения для рассматриваемого транспортного средства. Отметим, что картографические данные для области согласно запланированному маршруту 51 движения могут быть получены после вычисления маршрута. Это делает возможным уменьшение объема получаемых данных.
[0030] На этапе S05 блок 25 получения рамки тщательного наблюдения получает данные о позициях и размерах рамок 31 тщательного наблюдения на карте из базы данных 16 рамок тщательного наблюдения. Блок 23 получения карты использует полученные данные о рамках 31 тщательного наблюдения, чтобы формировать картографические данные, в которых заданы рамки 31 тщательного наблюдения. Обработка переходит к этапу S07; блок 26 вычисления диапазона восприятия вычисляет диапазон 32 восприятия на карте на основе текущей позиции и ориентации рассматриваемого транспортного средства, а также картографических данных.
[0031] Обработка переходит к этапу S09; в слепых зонах для рассматриваемого транспортного средства 41, созданных препятствием (например, зданиями 36, 37), блок 27 вычисления слепой зоны обнаруживает часть, которая перекрывается с диапазоном 32 восприятия, в качестве слепой зоны 33 для рассматриваемого транспортного средства. В частности, блок 27 вычисления слепой зоны получает позиционную информацию для зданий 36, 37, присутствующих вокруг транспортного средства, которая обнаруживается посредством установленной в транспортном средстве камеры 13 и лазерного датчика 14. Сравнивая диапазон 32 восприятия и позиции зданий 36, 37, блок 27 вычисления слепой зоны может вычислять слепые зоны 33 для рассматриваемого транспортного средства, которые перекрываются с диапазоном 32 восприятия.
[0032] Обработка переходит к этапу S11; блок 21 интерпретации обстановки определяет, перекрываются ли друг с другом рамки 31 тщательного наблюдения и слепые зоны 33 для рассматриваемого транспортного средства. Если они перекрываются друг с другом (да на этапе S11), обработка переходит к этапу S13. Если они не перекрываются друг с другом (Нет на этапе S11), обработка возвращается к этапу S07. На этапе S13, относительно всей площади рамки 31 тщательного наблюдения, блок 28 вычисления пропорции видимости вычисляет пропорцию каждой площади рамок тщательного наблюдения, которая перекрывается со слепой зоной 33 для рассматриваемого транспортного средства.
[0033] Обработка переходит к этапу S15; блок 29 определения пропорции определяет, является ли текущее практическое поведение практическим поведением для слепой зоны или обычным практическим поведением. В частности, блок 29 определения пропорции определяет, установлен ли флаг преодоления слепой зоны, который указывает, что практическое поведение является практическим поведением для слепой зоны. Если флаг преодоления слепой зоны установлен (F=1) (Да на этапе S15), обработка переходит к этапу S23, поскольку текущее практическое поведение является практическим поведением для слепой зоны. Если флаг преодоления слепой зоны не установлен (F=0) (Нет на этапе S15), обработка переходит к этапу S17, поскольку текущее практическое поведение является обычным практическим поведением.
[0034] На этапе S17 блок 29 определения пропорции определяет, больше или равна пропорция, вычисленная посредством блока 28 вычисления пропорции видимости, предварительно определенному пороговому значению (Ts) начала, как показано на фиг. 9. Если пропорция больше или равна предварительно определенному пороговому значению начала (Да на этапе S17), может быть выполнено определение, что риск столкновения с движущимся объектом является высоким. Таким образом, обработка переходит к этапу S19; блок 29 определения пропорции решает начать практическое поведение для слепой зоны, и блок 22 помощи вождению выполняет управление движением рассматриваемого транспортного средства согласно решенному практическому поведению для слепой зоны. После этого обработка переходит к этапу S21; флаг преодоления слепой зоны устанавливается в 1 (F=1). С другой стороны, если пропорция не больше или равна предварительно определенному пороговому значению начала (Нет на этапе S17), может быть выполнено определение, что риск столкновения с движущимся объектом все еще является низким. Таким образом, обычное практическое поведение продолжается, и обработка возвращается к этапу S07.
[0035] На этапе S23 блок 29 определения пропорции определяет, меньше или равна пропорция, вычисленная посредством блока 28 вычисления пропорции видимости, предварительно определенному пороговому значению (Te) окончания, как показано на фиг. 10. Если пропорция меньше или равна предварительно определенному пороговому значению (Te) окончания (Да на этапе S23), может быть выполнено определение, что риск столкновения с движущимся объектом является низким. Таким образом, обработка переходит к этапу S25; блок 29 определения пропорции решает закончить практическое поведение для слепой зоны, и блок 22 помощи вождению выполняет управление движением рассматриваемого транспортного средства согласно обычному практическому поведению. Обработка переходит к этапу S27; и флаг преодоления слепой зоны устанавливается в 0 (F=0). С другой стороны, если пропорция не является меньшей или равной предварительно определенному пороговому значению (Te) окончания (Нет на этапе S23), может быть выполнено определение, что риск столкновения с движущимся объектом все еще является высоким. Таким образом, практическое поведение для слепой зоны продолжается, и обработка возвращается к этапу S07.
[0036] Например, во время B на фиг. 4(b), поскольку пропорция (пропорция видимости) становится больше предварительно определенного порогового значения (Ts) начала, практическое поведение переключается с обычного практического поведения на практическое поведение для слепой зоны (S19). Это вынуждает скорость транспортного средства замедляться с обычной скорости до нуля. Выполнение такого практического поведения для слепой зоны снижает риск столкновения в обстановке с плохой видимостью и предоставляет возможность безопасного движения. Затем, практическое поведение для слепой зоны продолжается до тех пор, пока пропорция не станет меньше предварительно определенного порогового значения (Te) окончания. В частности, как показано на фиг. 10, рассматриваемое транспортное средство замедляет ход и движется до тех пор, пока пропорция не станет меньше предварительно определенного порогового значения (Te) окончания. Когда пропорция становится меньше предварительно определенного порогового значения (Ts) окончания, рассматриваемое транспортное средство останавливается. Пороговое значение (Ts) начала и пороговое значение (Te) окончания могут быть одинаковым значением; однако, пороговое значение (Te) окончания предпочтительно меньше порогового значения (Ts) начала, так что создается гистерезис. Это улучшает устойчивость системы управления транспортным средством. Например, когда пороговое значение (Ts) начала устанавливается в 10%, пороговое значение (Te) окончания может быть установлено в 5%.
[0037] Отметим, что, в случае, когда движущийся объект обнаруживается в области с хорошей видимостью, в то время как транспортное средство движется, чтобы делать пропорцию меньше предварительно определенного порогового значения (Te) окончания, транспортное средство останавливается. Иначе, если скорость движения движущегося объекта является медленной, транспортное средство может ускоряться, чтобы проезжать впереди движущегося объекта.
[0038] Как описано выше, следующий результат работы может быть получен согласно этому варианту осуществления.
[0039] Определение практического поведения рассматриваемого транспортного средства 41 на основе пропорции слепой зоны 33 для рассматриваемого транспортного средства 41 относительно рамки 31 тщательного наблюдения (критерия обнаружения тщательного наблюдения) может предотвращать характер вождения, чрезмерно фокусирующийся на безопасности. Таким образом, характер вождения, чрезмерно фокусирующийся на безопасности, может быть предотвращен, и дискомфорт, который чувствуют окружающие люди, может быть уменьшен.
[0040] Что касается всей площади рамки 31 тщательного наблюдения, предусмотренной в области тщательного наблюдения, блок 28 вычисления пропорции видимости вычисляет пропорцию площади рамки 31 тщательного наблюдения, которая перекрывается со слепой зоной 33 рассматриваемого транспортного средства 41. Поскольку практическое поведение определяется на основе соотношения площади между слепой зоной 33 и рамкой, окружающей внешний периметр области тщательного наблюдения, вычисление риска с высокой точностью может быть выполнено с помощью простой модели.
[0041] Когда пропорция становится больше предварительно определенного порогового значения (Ts) начала, блок 29 определения пропорции решает начать практическое поведение, которое учитывает слепую зону 33 для рассматриваемого транспортного средства 41. Переключение управления движением на основе порогового значения (Ts) начала в качестве границы может выполнять надлежащее управление для каждой обстановки. Выполнение практического поведения, чрезмерно уменьшающего риск столкновения, пресекается.
[0042] Отметим, что, когда скорость рассматриваемого транспортного средства 41 является быстрой, желательно, чтобы пороговое значение (Ts) начала было установлено небольшим. Таким образом, резкое управление скоростью или управление системой рулевого управления в начале управления пресекается, и, таким образом, управление может быть начато плавно.
[0043] Блок 22 помощи вождению предоставляет возможность рассматриваемому транспортному средству двигаться, пока пропорция не станет меньше предварительно определенного порогового значения (Te) окончания, и предоставляет возможность рассматриваемому транспортному средству останавливаться после этого. Таким образом, безопасное движение может выполняться даже в ситуации с плохой видимостью.
[0044] [Второй вариант осуществления]
Как показано на фиг. 5, критерий обнаружения тщательного наблюдения может быть группой точек тщательного наблюдения, включающей в себя множество точек 42 тщательного наблюдения, предусмотренных в области тщательного наблюдения. В таком случае, что касается числа всех точек 42 тщательного наблюдения, включенных в группу точек тщательного наблюдения, блок 28 вычисления пропорции видимости вычисляет пропорцию числа точек 42 тщательного наблюдения, которые перекрываются со слепыми зонами 33 для рассматриваемого транспортного средства 41. Другая конфигурация и процедура работы являются такими же, что и в первом варианте осуществления; таким образом, их описания пропускаются. Точки 42 тщательного наблюдения размещаются неравномерно в области тщательного наблюдения. Кроме того, распределение плотности точек 42 тщательного наблюдения в области тщательного наблюдения изменяется согласно величине риска столкновения. Т.е. точки 42 тщательного наблюдения распределяются с высокой плотностью в: позиции, где движущийся объект вероятно должен существовать; позиции с плохой видимостью; или позиции, где риск столкновения между движущимся объектом и рассматриваемым транспортным средством 41 является высоким, если движущийся объект присутствует. Это делает возможным вычислять соответствующую пропорцию согласно риску столкновения.
[0045] В случае, когда суммарное число точек тщательного наблюдения, предусмотренных в одной области тщательного наблюдения, определяется заранее, блок 28 вычисления пропорции видимости лишь просто получает число точек 42 тщательного наблюдения, которые перекрываются со слепой зоной 33 для рассматриваемого транспортного средства 41. В этом случае, также пороговое значение (Ts) начала и пороговое значение (Te) окончания могут быть определены на основе числа точек 42 тщательного наблюдения.
[0046] В случае, когда одна точка 42 тщательного наблюдения имеет предварительно определенный размер, и часть точки 42 тщательного наблюдения перекрывается со слепой зоной 33, пропорция может быть вычислена аналогично первому варианту осуществления с помощью соотношения площадей между перекрывающейся частью и рамкой тщательного наблюдения, окружающей внешний периметр точки 42 тщательного наблюдения. Т.е. насколько нагрузка вычислительной обработки позволяет, каждая точка 42 тщательного наблюдения может быть использована в качестве одной или более рамок 31 тщательного наблюдения на фиг. 4.
[0047] Таким образом, пропорция может быть просто получена из числа точек тщательного наблюдения посредством задания группы точек тщательного наблюдения, включающей в себя множество точек 42 тщательного наблюдения, предусмотренных в области тщательного наблюдения, в качестве критерия обнаружения тщательного наблюдения. Таким образом, вычисление риска с высокой точностью может быть выполнено без увеличения вычислительной нагрузки.
[0048] [Третий вариант осуществления]
Как показано на фиг. 6, критерий обнаружения тщательного наблюдения может быть линейным расслоением, включающим в себя один или более отрезков 44 линии тщательного наблюдения, предусмотренных в области тщательного наблюдения. В этом случае, что касается суммарного значения длин всех отрезков 44 линии тщательного наблюдения, предусмотренных в области тщательного наблюдения, блок 28 вычисления пропорции видимости вычисляет пропорцию длин отрезков 44 линии тщательного наблюдения, которые перекрываются со слепой зоной 33 для рассматриваемого транспортного средства 41. Другая конфигурация и процедура работы являются такими же, что и в первом варианте осуществления; таким образом, их описания пропускаются.
[0049] Длины, число и размещение отрезков 44 линии тщательного наблюдения могут изменяться произвольно. Согласно величине риска столкновения распределение плотности отрезков 44 линии тщательного наблюдения в области тщательного наблюдения изменяется. Т.е. отрезки 44 линии тщательного наблюдения распределяются с высокой плотностью в: позиции, где движущийся объект вероятно должен существовать; позиции с плохой видимостью; или позиции, где риск столкновения между движущимся объектом и рассматриваемым транспортным средством 41 является высоким, если движущийся объект присутствует. Это делает возможным вычислять соответствующую пропорцию согласно риску столкновения.
[0050] В примере, показанном на фиг. 6, в двух областях тщательного наблюдения иллюстрируются четыре отрезка линии, перпендикулярных направлению 35 движения транспортного средства, и два отрезка линии, параллельных направлению 35 движения транспортного средства. Все отрезки линий являются прямыми, но все или один из отрезков линий может быть криволинейным, конечно.
[0051] В случае, когда суммарная длина каждого отрезка 44 линии тщательного наблюдения, предусмотренного в одной области тщательного наблюдения, определяется заранее, блок 28 вычисления пропорции видимости может лишь просто получать длину отрезка 44 линии тщательного наблюдения, который перекрывается со слепой зоной 33 для рассматриваемого транспортного средства 41. В этом случае, также пороговое значение (Ts) начала и пороговое значение (Te) окончания могут быть определены на основе длины отрезка 44 линии тщательного наблюдения.
[0052] Таким образом, пропорция может быть просто получена из длины отрезка 44 линии тщательного наблюдения посредством задания одного или более отрезков 44 линии тщательного наблюдения, предусмотренных в области тщательного наблюдения, в качестве критерия обнаружения тщательного наблюдения. Таким образом, вычисление риска с высокой точностью может быть выполнено без увеличения вычислительной нагрузки.
[0053] Отметим, что рамка 31 тщательного наблюдения, показанная на фиг. 4, может быть интерпретирована как линейное расслоение, включающее себя четыре отрезка 44 линии тщательного наблюдения, предусмотренных в области тщательного наблюдения. В случае, когда четыре отрезка 44 линии тщательного наблюдения формируют одну рамку 31 тщательного наблюдения, блок 28 вычисления пропорции видимости может лишь вычислять пропорцию длины рамки 31 тщательного наблюдения, которая перекрывается со слепой зоной 33 для рассматриваемого транспортного средства 41, относительно суммарной длины рамки 31 тщательного наблюдения.
[0054] Кроме того, в случае, отличном от случая, когда рамка 31 тщательного наблюдения включает в себя отрезки линии, окружающие внешний периметр области тщательного наблюдения, вся рамка 31 тщательного наблюдения может быть одним отрезком линии, включающим в себя одну кривую линию, как показано на фиг. 7. Другими словами, рамка 31 тщательного наблюдения не ограничивается четырехугольником, как показано на фиг. 4; например, рамка 31 тщательного наблюдения может быть овалом 45, правильным кругом, треугольником или многоугольником с пятью или более углами. Кроме того, в случае, когда три или более отрезков 44 линии тщательного наблюдения формируют замкнутую рамку, пропорция слепой зоны, которая перекрывается с областью, окруженной рамкой, может быть вычислена аналогично первому варианту осуществления.
[0055] [Четвертый вариант осуществления]
Критерий обнаружения тщательного наблюдения может включать в себя весовой коэффициент, который изменяется согласно позиции на карте. В этом случае пропорция слепой зоны для рассматриваемого транспортного средства относительно критерия обнаружения тщательного наблюдения изменяется согласно весовому коэффициенту, применяемому к позиции на карте, где критерий обнаружения тщательного наблюдения перекрывается со слепой зоной для рассматриваемого транспортного средства. Например, в случае, когда критерий обнаружения тщательного наблюдения является рамкой тщательного наблюдения, пропорция площади, где рамка тщательного наблюдения и слепая зона для рассматриваемого транспортного средства перекрываются друг с другом, относительно всей площади рамки тщательного наблюдения изменяется согласно весовому коэффициенту.
[0056] Фиг. 8 показывает пример рамки 48 тщательного наблюдения, к которой применяется весовой коэффициент. Как показано на фиг. 8(b), рамка 48 тщательного наблюдения включает в себя перекрывающиеся многочисленные (три на фиг. 8) овалы с различными размерами. Как показано на фиг. 8(c), к каждому овалу применяется информация о вероятности Z аварии в качестве примера весового коэффициента. В частности, к внутреннему небольшому овалу применяется информация, указывающая вероятность Z аварии, которая является более высокой вероятностью, чем вероятность, ассоциированная с внешним более крупным овалом. Таким образом, риск столкновения выше в случае, когда слепая зона 33 для рассматриваемого транспортного средства 41 перекрывается с внутренним небольшим овалом, чем в случае, когда слепая зона 33 для рассматриваемого транспортного средства 41 перекрывается с внешним более крупным овалом, и пропорция (пропорция видимости) становится большей.
[0057] Отметим, что информация для вероятности Z аварии может быть получена посредством загрузки данных (46, 47) о прошлых авариях с сервера управления информацией об авариях, как показано на фиг. 8(a), например. Кроме того, позиция на карте, к которой применяется высокая вероятность Z аварии, может быть не только позицией, где авария произошла в прошлом, но может также быть другой позицией, которая аналогична позиции, где произошла авария. Например, если был инцидент удара другого транспортного средства при повороте направо или налево на перекрестке, высокая вероятность Z аварии может также быть применена к позиции, где аналогичная авария может произойти в случае въезда на другой перекресток или тот же перекресток с другого направления.
[0058] Значение вероятности Z аварии может быть изменено согласно деталям аварии. Например, вероятность Z аварии для аварии с человеческими жертвами может быть выше вероятности для аварии, вызвавшей имущественный ущерб. Распределение вероятности Z аварии, показанное на фиг. 8(c), может быть вычислено как гауссово распределение, например.
[0059] Таким образом, пропорция слепой зоны 33 для рассматриваемого транспортного средства 41 относительно критерия обнаружения тщательного наблюдения изменяется согласно весовому коэффициенту (вероятности Z аварии), применяемому к позиции на карте, которая перекрывается со слепой зоной 33 для рассматриваемого транспортного средства 41. Это делает возможным точную оценку риска столкновения и вычисление подходящей пропорции согласно риску столкновения.
[0060] В четвертом варианте осуществления случай, когда критерий обнаружения тщательного наблюдения создается из овальной рамки, был описан в качестве примера. В отличие от этого, само собой разумеется, что отрезок линии тщательного наблюдения и точка тщательного наблюдения могут также быть взвешены тем же образом.
[0061] [Пятый вариант осуществления]
Критерий обнаружения тщательного наблюдения может быть изменен согласно дате и времени, окружающей обстановке вокруг рассматриваемого транспортного средства 41 или пути движения движущегося объекта, присутствующего около рассматриваемого транспортного средства 41.
[0062] Пример, когда критерий обнаружения тщательного наблюдения изменяется согласно дате и времени, описывается ниже. В случае, когда сигнал светофора меняется на мигающий сигнал со временем на перекрестке, устанавливается критерий обнаружения тщательного наблюдения. Если сигнал светофора функционирует обычным образом, критерий обнаружения тщательного наблюдения не устанавливается. В конкретном месте, где величина транспортного потока увеличивается согласно дате и времени, такой как праздничный день, критерий обнаружения тщательного наблюдения устанавливается широко. Альтернативно, в дату и время, когда величина транспортного потока увеличивается, пороговое значение начала и пороговое значение окончания управления, охватывающего слепую зону, уменьшаются. Это снижает риск столкновения и улучшает безопасность.
[0063] Пример, когда критерий обнаружения тщательного наблюдения изменяется согласно окружающей обстановке вокруг рассматриваемого транспортного средства 41, описывается ниже. В плохую погоду, шторм или в ночное время трудно для водителя другого транспортного средства подтверждать безопасность вокруг транспортного средства. В такой ситуации трудно распознавать рассматриваемое транспортное средство, и, таким образом, рассматриваемое транспортное средство нуждается в более низком риске столкновения и дополнительном улучшении безопасности. По этой причине, точка обнаружения тщательного наблюдения делается шире обычной. Иначе, пороговое значение начала и пороговое значение окончания управления, охватывающего слепую зону, уменьшаются. Это делает возможным снижение риска столкновения и улучшение безопасности.
[0064] Пример, когда критерий обнаружения тщательного наблюдения изменяется согласно пути движения движущегося объекта, присутствующего около рассматриваемого транспортного средства 41, описывается ниже. Как показано на фиг. 11, в случае, когда движущийся объект (другое транспортное средство 53) находится в области 31a тщательного наблюдения, в то время как другое транспортное средство 53 находится между ними, к стороне, более близкой к рассматриваемому транспортному средству 41, и стороне, более дальней от рассматриваемого транспортного средства 41, могут быть, соответственно, применены раздельные рамки (31aa, 31ab) тщательного наблюдения. В этом случае рамка 31ab тщательного наблюдения на более близкой стороне задается для обнаружения пешехода, в то время как рамка 31aa тщательного наблюдения на дальней стороне задается для обнаружения двухколесного транспортного средства.
[0065] Другие критерии обнаружения тщательного наблюдения могут быть заданы для случая, когда другое транспортное средство 53 стоит у стоп-линии на въезде на перекресток, и для случая, когда другое транспортное средство 53 движется около стоп-линии. В случае, когда критерий обнаружения тщательного наблюдения является рамкой тщательного наблюдения, рамка тщательного наблюдения с короткой длиной в направлении движения другого транспортного средства 53 задается, когда скорость другого транспортного средства 53 является более высокой, а в случае, когда другое устройство 53 стоит у стоп-линии, задается рамка тщательного наблюдения с большой длиной в направлении движения другого транспортного средства 53. Причиной того, почему длина рамки тщательного наблюдения делается длинной, когда другое транспортное средство 53 стоит, является то, что зрительное восприятие на длинное расстояние необходимо для прогнозирования двухколесного транспортного средства, въезжающего в область тщательного наблюдения. Альтернативно, в случае, когда другое транспортное средство 53 стоит у стоп-линии, пороговое значение начала и пороговое значение окончания управления, охватывающего слепую зону, уменьшаются. Это делает возможным снижение риска столкновения и улучшение безопасности.
[0066] Как описано выше, изменение критерия обнаружения тщательного наблюдения согласно дате и времени, окружающая обстановка вокруг рассматриваемого транспортного средства 41, и путь движения движущегося объекта, присутствующего около рассматриваемого транспортного средства 41, делает возможным точную оценку риска столкновения и вычисление соответствующей пропорции согласно риску столкновения. Безопасность может быть улучшена в ситуации, такой как ситуация, когда дорога переполняется в праздничный день или во время ежедневной внутригородской миграции, во время заката или в ночное время, когда трудно для другого транспортного средства подтверждать безопасность вокруг транспортного средства.
[0067] Хотя варианты осуществления настоящего изобретения были описаны выше, описания или чертежи, составляющие часть этого описания, не должны пониматься как ограничивающие настоящее изобретение. Из описания изобретения различные альтернативные варианты осуществления, примеры и операционные техники будут очевидны специалистам в области техники.
[0068] Например, в вариантах осуществления, управление, охватывающее слепую зону, для скорости рассматриваемого транспортного средства 41 было описано, как показано на фиг. 4(b); однако управление, охватывающее слепую зону, существует не только для скорости рассматриваемого транспортного средства 41, но также для запланированного маршрута 51 движения рассматриваемого транспортного средства 41. Например, как показано на фиг. 12(a), в вариантах осуществления, рассматриваемое транспортное средство 41 поворачивает направо на перекрестке по запланированному маршруту 51 движения. В этом отношении, рассматриваемое транспортное средство 41 начинает двигаться в левую сторону перед въездом на перекресток и поворачивает направо на перекрестке по запланированному маршруту 52 движения, который находится на внешней стороне запланированного маршрута 51 движения. Таким образом, слепая зона, которая перекрывается с областью 31a тщательного наблюдения, может быть уменьшена при въезде на перекресток. Это делает возможным предоставление возможности рассматриваемому транспортному средству 41 проезжать через перекресток безопасно без чрезмерного управления замедлением.
[0069] Даже если направление въезда на перекресток изменяется, управление, охватывающее слепую зону, для запланированного маршрута движения рассматриваемого транспортного средства 41, может быть выполнено. Например, как показано на фиг. 12(b), в случае, когда рассматриваемое транспортное средство 41 едет прямо через перекресток дороги, имеющей три ответвления, такой же, что и перекресток на фиг. 12(a), область 31c тщательного наблюдения существует с левой стороны рассматриваемого транспортного средства 41. Рассматриваемое транспортное средство 41 начинает двигаться в правую сторону перед въездом на перекресток и едет прямо через перекресток по запланированному маршруту 52 движения, который находится с правой стороны запланированного маршрута 51 движения. Таким образом, слепая зона, которая перекрывается с областью 31c тщательного наблюдения, может быть уменьшена при въезде на перекресток.
[0070] Предположим, что присутствует препятствие, движущееся по направлению к рассматриваемому транспортному средству с постоянным ускорением в слепой зоне для рассматриваемого транспортного средства, патентная литература 1 вычисляет потенциальный риск столкновения и определяет характер вождения на основе риска столкновения. Однако, даже если присутствует неподвижный объект на маршруте рассматриваемого транспортного средства, патентная литература 1 не может учитывать статическое состояние и, таким образом, определяет, что рассматриваемое транспортное средство столкнется с неподвижным объектом. Даже в случае, когда рассматриваемое транспортное средство может предохранять себя от столкновения с движущимся объектом посредством ускорения, рассматриваемое транспортное средство не может ускоряться. Даже если не присутствует препятствие на задней стороне слепой зоны, рассматриваемое транспортное средство не ожидает, что нет никакого движущегося объекта. Таким образом, рассматриваемое транспортное средство замедляется даже в случае, когда замедление не нужно. Варианты осуществления учитывают пропорцию слепой зоны рассматриваемого транспортного средства относительно области тщательного наблюдения на карте, которая влияет на риск столкновения. Таким образом, характер вождения, чрезмерно фокусирующийся на безопасности, может быть предотвращен, и дискомфорт, который чувствуют окружающие люди, может быть уменьшен.
Список ссылочных знаков
[0071] 1 устройство контроля помех
22 блок помощи вождению (блок управления транспортным средством)
23 блок получения карты
28 блок вычисления пропорции видимости
29 блок определения пропорции (блок определения поведения)
31, 48 рамка тщательного наблюдения (критерий обнаружения тщательного наблюдения)
33 слепая зона
41, 46 рассматриваемое транспортное средство
42 точка тщательного наблюдения (критерий обнаружения тщательного наблюдения)
44 отрезок линии тщательного наблюдения (критерий обнаружения тщательного наблюдения)
51, 52 запланированный маршрут движения
Изобретение относится к устройствам управления транспортными средствами. Устройство контроля помех содержит блок получения карты, блок вычисления пропорции, блок определения поведения и блок управления транспортным средством. Блок получения карты получает картографические данные, в которых один или более критериев обнаружения тщательного наблюдения заданы заранее и в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться. Блок вычисления пропорции вычисляет пропорцию слепой зоны для рассматриваемого транспортного средства относительно критерия обнаружения тщательного наблюдения. Блок определения поведения определяет практическое поведение рассматриваемого транспортного средства на основе пропорции. Блок управления транспортным средством выполняет управление движением рассматриваемого транспортного средства в соответствии с упомянутым определенным практическим поведением. Достигается повышение безопасности управления транспортным средством. 8 з.п. ф-лы, 18 ил.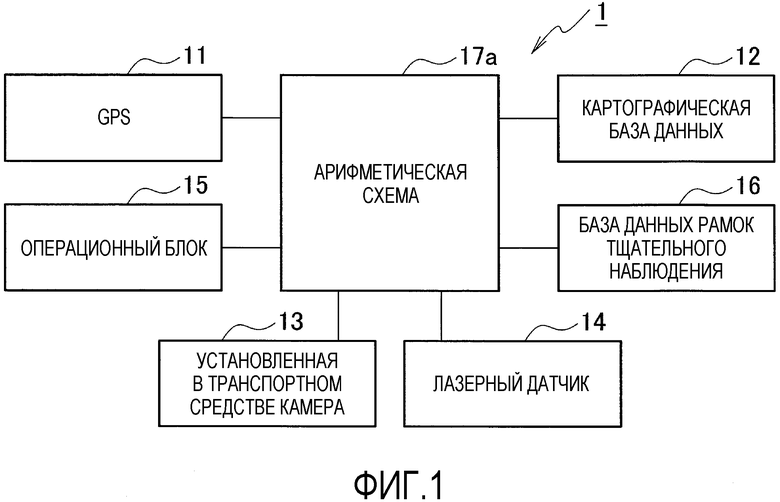
1. Устройство (1) контроля помех, содержащее:
блок (23) получения карты, который получает картографические данные, в которых один или более критериев (31, 42, 44, 48) обнаружения тщательного наблюдения заданы заранее и в которых присутствие или отсутствие движущегося объекта должно тщательно наблюдаться;
блок (28) вычисления пропорции, который вычисляет пропорцию слепой зоны (33) для рассматриваемого транспортного средства (41, 46) относительно критерия (31, 42, 44, 48) обнаружения тщательного наблюдения;
блок (29) определения поведения, который определяет практическое поведение рассматриваемого транспортного средства (41, 46) на основе пропорции; и
блок (22) управления транспортным средством, который выполняет управление движением рассматриваемого транспортного средства (41, 46) в соответствии с упомянутым определенным практическим поведением, при этом блок (22) управления транспортным средством управляет скоростью рассматриваемого транспортного средства (41, 46) на основе пропорции.
2. Устройство (1) контроля помех по п. 1, в котором
критерий (42) обнаружения тщательного наблюдения является группой точек тщательного наблюдения, включающей в себя множество точек (42) тщательного наблюдения, и
блок (28) вычисления пропорции вычисляет пропорцию числа точек тщательного наблюдения, которые перекрываются со слепой зоной (33) для рассматриваемого транспортного средства (41, 46), относительно числа всех точек тщательного наблюдения, включенных в каждую группу точек тщательного наблюдения.
3. Устройство (1) контроля помех по п. 1 или 2, при этом
критерий (44) обнаружения тщательного наблюдения включает в себя один или более отрезков (44) линии тщательного наблюдения, и
блок (28) вычисления пропорции вычисляет пропорцию длин отрезков линии тщательного наблюдения, которые перекрываются со слепой зоной (33) для рассматриваемого транспортного средства (41, 46), относительно суммарного значения длин всех отрезков линии тщательного наблюдения.
4. Устройство (1) контроля помех по п. 1 или 2, при этом
критерий (31, 48) обнаружения тщательного наблюдения включает в себя одну или более рамок (31, 48) тщательного наблюдения, и
блок (28) вычисления пропорции вычисляет пропорцию площадей рамок тщательного наблюдения, которые перекрываются со слепой зоной (33) для рассматриваемого транспортного средства (41, 46), относительно площадей всех рамок тщательного наблюдения.
5. Устройство (1) контроля помех по п. 1 или 2, при этом
критерий (31, 42, 44, 48) обнаружения тщательного наблюдения включает в себя весовой коэффициент, который изменяется согласно позиции на карте, и
пропорция слепой зоны (33) для рассматриваемого транспортного средства (41, 46) относительно критерия (31, 42, 44, 48) обнаружения тщательного наблюдения изменяется согласно весовому коэффициенту, примененному к позиции на карте, которая перекрывается со слепой зоной (33) для рассматриваемого транспортного средства (41, 46).
6. Устройство (1) контроля помех по п. 1 или 2, при этом когда пропорция становится больше предварительно определенного порогового значения начала, блок (29) определения поведения решает: начинать практическое поведение, которое учитывает слепую зону (33) для рассматриваемого транспортного средства (41, 46).
7. Устройство (1) контроля помех по п. 6, в котором пороговое значение начала задается меньше, когда скорость рассматриваемого транспортного средства (41, 46) является более высокой.
8. Устройство (1) контроля помех по п. 6, при этом
блок (29) определения поведения определяет: становится ли пропорция меньше предварительно определенного порогового значения окончания, и
блок (22) управления транспортным средством предоставляет возможность рассматриваемому транспортному средству (41, 46) двигаться до тех пор, пока пропорция не станет меньше предварительно определенного порогового значения окончания, и после этого предоставляет возможность рассматриваемому транспортному средству (41, 46) останавливаться.
9. Устройство (1) контроля помех по п. 1 или 2, при этом критерий (31, 42, 44, 48) обнаружения тщательного наблюдения изменяется согласно дате и времени, окружающей обстановке вокруг рассматриваемого транспортного средства (41, 46) или пути движения движущегося объекта, присутствующего около рассматриваемого транспортного средства (41, 46).
| JP 2011248870 A, 08.12.2011 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ кодирования сообщений статистическим кодом | 1959 |
|
SU147024A1 |

