Область техники
[0001]
Настоящее изобретение относится к способу помощи в путешествии и устройству помощи в путешествии.
УРОВЕНЬ ТЕХНИКИ
[0002]
Патентный документ 1 раскрывает методику перехода от автоматического привода на основе картографической информации к ручному приводу на основе операции вождения пользователем транспортного средства, когда существует точка ветвления, которая соответствует заданному условию перед транспортным средством, и восстанавливает автоматическое управление вождением после того, как транспортное средство, передвигающееся ручным приводом, проходит через точку разветвления.
СПИСОК ЦИТАТ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентный документ 1: Японская патентная публикация №. 2016-050901
СУЩНОСТЬ ИЗОБРЕТЕНИЯ ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Когда транспортное средство, движущееся по пути передвижения на основе картографической информации, въезжает в область, не покрытую картографической информацией, и переключается на другой путь передвижения, например, на основе траектории предыдущего транспортного средства, транспортное средство может вызывать нерегулярное поведение в зависимости от условий пути передвижения для следования.
[0005]
Чтобы решить вышеупомянутую традиционную проблему, настоящее изобретение предоставляет способ помощи в путешествии и устройство помощи в путешествии, позволяющие транспортному средству предотвращать нерегулярное поведение при переключении с пути передвижения на основе картографической информации на другой путь передвижения.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Аспект настоящего изобретения предоставляет способ помощи в путешествии, включающий в себя создание первого пути передвижения на основе картографической информации вокруг окружения рассматриваемого транспортного средства, генерирование второго пути передвижения на основе окружения рассматриваемого транспортного средства, определяя, что переключение с первого пути передвижения ко второму пути передвижения необходимо, когда обнаруживается, что первый генерируемый путь передвижения должен заканчиваться впереди рассматриваемого транспортного средства, в то время как рассматриваемое транспортное средство движется по первому пути передвижения, и управление рассматриваемым транспортным средством, чтобы выполнить переход от первого пути передвижения ко второму пути передвижения, когда определено, что переключение необходимо.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
Фигура 1 является блок-схемой, иллюстрирующей устройство помощи в путешествии в соответствии с вариантом осуществления настоящего изобретения;
Фигура 2 - блок-схема, иллюстрирующая случай переключения на путь передвижения, который является траекторией передвижения предыдущего транспортного средства, движущегося по той же полосе движения;
Фигура 3 - блок-схема, иллюстрирующая случай переключения на путь передвижения, который является траекторией передвижения предыдущего транспортного средства, передвигающегося по соседней полосе движения;
Фигура 4 - блок-схема, иллюстрирующая случай, в котором пересечение присутствует перед путем передвижения на основе картографической информации высокой четкости;
Фигура 5 блок-схема, иллюстрирующая случай создания множества путей передвижения, которые являются траекториями передвижения, соответствующими предшествующим транспортным средствам; а также
Фигура 6 - блок-схема последовательности операций, иллюстрирующая способ помощи в путешествии в соответствии с вариантом осуществления настоящего изобретения. Описание вариантов осуществления
[0009]
В дальнейшем вариант осуществления согласно настоящему изобретению будет описан со ссылкой на чертежи. В описаниях чертежей, приведенных ниже, одинаковые или подобные элементы обозначены одинаковыми или похожими ссылочными позициями, и перекрывающиеся пояснения не повторяются ниже. Следует понимать, что чертежи проиллюстрированы схематично, а не в масштабе. Описанный ниже вариант осуществления иллюстрирует устройство и способ для воплощения технических идей настоящего изобретения, которые не предназначены для ограничения структурами или компоновками элементов, как описано в данном документе. Технические идеи настоящего изобретения должны охватывать различные модификации, попадающие в объем изобретения, как определено в прилагаемой формуле изобретения.
[0010]
(Устройство помощи при путешествии)
Устройство помощи в путешествии в соответствии с вариантом осуществления настоящего изобретения установлено, например, на транспортном средстве (в дальнейшем транспортное средство, на котором установлено устройство помощи в путешествии в соответствии с вариантом осуществления, называется «рассматриваемым транспортным средством»). Устройство помощи в путешествии в соответствии с вариантом осуществления может выполнять обработку помощи в движении, включая автономное вождение, которое управляет рассматриваемым транспортным средством для автономного передвижения по пути передвижения, и руководство, чтобы побуждать водителя заставлять рассматриваемое транспортное средство двигаться вдоль пути передвижения. Автономное вождение включает в себя как случаи выполнения всех операций вождения, торможения и рулевого управления рассматриваемого транспортного средства без участия пассажира (водителя), вовлеченных в какую-либо операцию, так и выполнения по меньшей мере одной из операций вождения, торможения и рулевого управления. Автономное вождение может выполнять любое из предшествующих транспортных средств, после контроля, контроля расстояния до транспортного средства и контроля предотвращения отклонения полосы движения, например.
Под ручным вождением понимается состояние движения посредством работы водителя без устройства помощи в движении в соответствии с вариантом осуществления настоящего изобретения, выполняющее любую из операций вождения, торможения и рулевого управления на рассматриваемом транспортном средстве.
[0011]
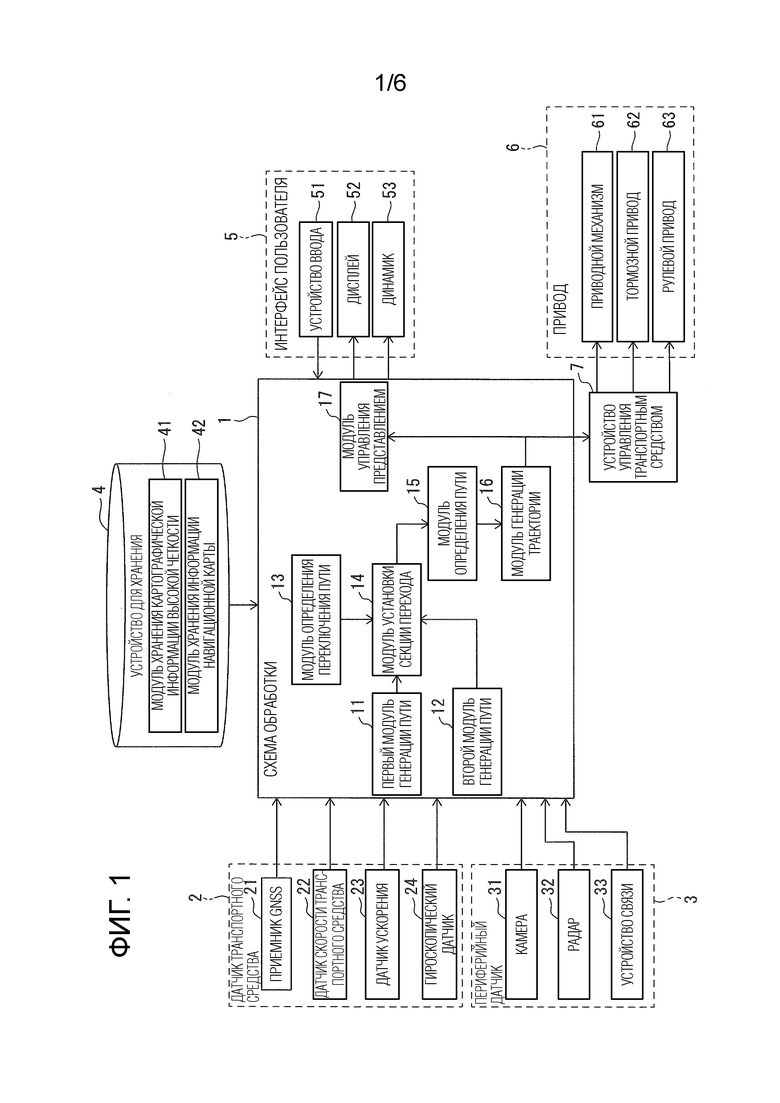
Как показано на фиг. 1, устройство помощи в путешествии в соответствии с вариантом осуществления включает в себя схему 1 обработки (устройство переключения пути передвижения), датчик 2 транспортного средства, периферийный датчик 3, запоминающее устройство 4, пользовательский интерфейс (I/F) 5, исполнительный механизм 6 и устройство 7 управления транспортным средством. Схема 1 обработки, датчик 2 транспортного средства, периферийный датчик 3, запоминающее устройство 4, пользовательский I/F 5, исполнительный механизм 6 и устройство 7 управления транспортным средством (схема управления транспортным средством) 7 могут связываться друг с другом, чтобы передавать и принимать данные и сигналы через шину локальной сети контроллера (CAN), например, проводным или беспроводным способом.
[0012]
Датчик 2 транспортного средства представляет собой датчик, который обнаруживает информацию о положении и состоянии движения рассматриваемого транспортного средства. Датчик 2 транспортного средства включает в себя приемник 21 глобальной навигационной спутниковой системы (GNSS), датчик 22 скорости транспортного средства, датчик 23 ускорения и гироскопический датчик 24. Типы и количество датчиков 2 транспортного средства не ограничиваются вышеуказанным случаем. Приемник 21 GNSS является, например, приемником системы глобального позиционирования (GPS), который получает информацию о местоположении рассматриваемого транспортного средства на основе радиоволнового сигнала, принятого от множества навигационных спутников, и выводит полученную информацию о местоположении рассматриваемого транспортного средства в схему обработки 1. Датчик 22 скорости транспортного средства определяет скорость транспортного средства, например, на основе скорости вращения колес рассматриваемого транспортного средства и выводит обнаруженную скорость транспортного средства в схему 1 обработки. Датчик 23 ускорения обнаруживает ускорение в направлении вперед-назад и, например, в направлении ширины транспортного средства рассматриваемого транспортного средства и выводит обнаруженное ускорение в схему 1 обработки. Гиродатчик 24 обнаруживает угловую скорость, такую как вращение оси рыскания рассматриваемого транспортного средства, и выводит обнаруженную угловую скорость в схему 1 обработки.
[0013]
Периферийный датчик 3 представляет собой датчик, который обнаруживает окружение (окружающие условия), включая переднюю сторону рассматриваемого транспортного средства. Периферийный датчик 3 включает в себя камеру 31, радар 32 и устройство 33 связи. Типы и количество периферийного датчика 3 не ограничиваются вышеуказанным случаем. Камера 31 может быть, например, ПЗС-камерой. Камера 31 может быть любой из монокулярной камеры, стереокамеры и всенаправленной камеры. Камера 31 захватывает окружение рассматриваемого транспортного средства, обнаруживает в качестве данных окружения рассматриваемого транспортного средства из захваченного изображения относительное положение объекта, такого как транспортные средства (другие транспортные средства), такие как предшествующее транспортное средство, пешеход или велосипед относительно рассматриваемого транспортного средства, расстояние между объектом и рассматриваемым транспортным средством, дорожная фигура и дорожная структура, такая как границы полосы движения (белые линии) на дороге, и выводит обнаруженные данные окружения в схему обработки 1.
[0014]
Радар 32 может быть радаром миллиметрового диапазона, радаром ультразвуковой волны или лазерным дальномером (LRF), например. Радар 32 обнаруживает в качестве данных окружения рассматриваемого транспортного средства относительное положение объекта относительно рассматриваемого транспортного средства, расстояние между объектом и рассматриваемым транспортным средством и относительную скорость объекта по отношению к рассматриваемому транспортному средству и выводит обнаруженные данные окружения на схему обработки 1. Устройство 33 связи принимает данные об окружающей среде рассматриваемого транспортного средства, такие как местоположения других транспортных средств и скорости других транспортных средств, посредством связи между транспортными средствами с другими транспортными средствами, связи между транспортными средствами на дороге с блоком на стороне дороги или связи с например, центром информации о дорожном движении, например, и выводит обнаруженные данные об окружающем пространстве в схему 1 обработки.
[0015]
Запоминающее устройство 4 может быть, например, полупроводниковым запоминающим устройством, магнитным запоминающим устройством или оптическим запоминающим устройством и может быть включено в схему 1 обработки. Запоминающее устройство 4 может быть реализовано одним аппаратным обеспечением или может быть реализовано множеством аппаратных средств. Запоминающее устройство 4 включает в себя модуль 41 хранения картографической информации высокой четкости для хранения картографической информации высокой четкости (картографической информации) и модуль 4 2 хранения информации навигационной карты для хранения картографической навигационной информации (далее называемой «информация навигационной карты»). База данных информации навигационной карты и картографической информации высокой четкости может управляться сервером, так что запоминающее устройство 4 может получать только разностные данные информации навигационной карты и картографической информации высокой четкости после обновления посредством телематики, того, что касается обновления информации навигационной карты, хранящейся в модуле 42 хранения информации навигационной карты, и картографической информации высокой четкости, хранящейся в модуле 41 хранения картографической информации высокой четкости.
[0016]
Информация навигационной карты, хранящаяся в модуле 42 хранения информации навигационной карты, включает в себя фрагменты информации для каждой дороги. Примеры информации на дороге, включенной в информацию навигационной карты включают в себя дорожные узлы, указывающие опорные точки на дороге опорной линии (например, осевой линии дороги), и дорожные ссылки, указывающие секционные аспекты дороги между соответствующими дорожными узлами. Информация о дорожных узлах включает в себя соответствующий идентификационный номер, позиционные координаты, количество дорожных связей, с которыми необходимо соединиться, и идентификационный номер соответствующих дорожных связей, с которыми необходимо соединиться. Информация о дорожных связях включает в себя соответствующий идентификационный номер, атрибут дороги, длину линии, количество полос движения, ширину дороги и ограничение скорости.
[0017]
Картографическая информация высокой четкости, хранящаяся в модуле 41 хранения картографической информации высокой четкости, является картографической информацией, имеющей более высокое разрешение, чем информация навигационной карты, и включает в себя фрагменты информации на полосу движения, более специфичную, чем информация на дороге. Когда на дороге имеется множество полос движения, картографическая информация высокой четкости включает в себя информацию на полосу движения. Примеры информации на полосу, включенной в картографическую информацию высокой четкости, включают в себя узлы полосы, указывающие опорные точки на контрольной линии полосы (например, среднюю линию в полосе), и линии полосы, указывающие аспекты сечения полосы между соответствующими узлами полосы. Информация об узлах полосы движения включает в себя соответствующий идентификационный номер, позиционные координаты, количество связей полосы движения, с которыми необходимо соединиться, и идентификационный номер соответствующих связей полосы движения, с которыми необходимо соединиться. Информация о связях полос включает в себя соответствующий идентификационный номер, тип полосы, ширину полосы, тип границы полосы, фигуру полосы и фигуру контрольной линии полосы. Картографическая информация высокой четкости дополнительно включает в себя информацию об объектах на земле, таких как тип и координаты положения объектов на земле, включая сигнал светофора, линию остановки, знак, здание, телеграфный столб, бордюр и пешеходный переход, присутствующий на полосе движения или вокруг нее, и идентификационный номер каждого узла полосы движения, и идентификационный номер каждой линии связи, соответствующие позиционным координатам объектов на земле.
[0018]
Поскольку карта высокой четкости включает в себя информацию об узлах и ссылках на полосу движения, может быть указана полоса, в которой рассматриваемое транспортное средство в данный момент движется по маршруту передвижения. Карта высокой четкости включает в себя информацию о местоположении в полосе, которая представляет собой информацию о координатах, указывающих положение полосы в направлении расширения и направлении ширины. Карта высокой четкости также имеет координаты объектов, указывающих каждую позицию в трехмерном пространстве (например, долготу, широту и высоту), и каждая полоса движения и вышеуказанные объекты на земле могут быть обозначены соответствующими фигуры в трехмерном пространстве.
[0019]
Каждая схема 1 обработки и устройство 7 управления транспортным средством служат в качестве контроллера, такого как электронный модуль управления (ECU), для выполнения арифметико-логических операций, необходимых для обработки устройства помощи при перемещении в соответствии с вариантом осуществления настоящего изобретения, и могут включать в себя процессор, запоминающее устройство и I/F ввода-вывода. Процессор может представлять собой микропроцессор, эквивалентный центральному процессору (ЦП), например, включающий в себя арифметико-логический модуль (АЛУ), схему управления (устройство управления) и различные типы регистров. Внутреннее или внешнее запоминающее устройство, включенное в каждую из схемы 1 обработки и устройства 7 управления транспортным средством, может быть, например, полупроводниковой памятью или дисковым носителем и может включать в себя регистр, кэш-память и носитель данных, такой как ПЗУ или ОЗУ в качестве рассматриваемого устройства хранения. Например, процессор может выполнять программу (программу помощи в путешествии), предварительно сохраненную в запоминающем устройстве и включающую в себя последовательность обработки, необходимую для операций устройства помощи в путешествии в соответствии с вариантом осуществления настоящего изобретения.
[0020]
Схема 1 обработки включает в себя логические блоки в качестве функциональных или физических аппаратных ресурсов, таких как модуль 11 генерации первого пути, модуль 12 генерации второго пути, модуль 13 определения переключения пути, модуль 14 установки секции перехода, модуль 15 определения пути, модуль 16 генерации траектории и модуль 17 управления представлением. Эти логические блоки могут физически реализовывать программируемое логическое устройство (PLD), такое как программируемая полем матрица затворов (FPGA), или могут реализовывать функциональную логическую схему, эквивалентно установленную в полупроводниковой интегральной схеме общего назначения посредством обработки программного обеспечения.
[0021]
Модуль 11 генерации первого пути, модуль 12 генерации второго пути, модуль 13 определения переключения пути, модуль 14 установки секции перехода, модуль 15 определения пути, модуль 16 генерации траектории и модуль 17 управления представлением, включенные в схему 1 обработки может быть реализована одним аппаратным обеспечением или каждая из них может быть реализована отдельным аппаратным обеспечением. Устройство 7 управления транспортным средством может быть включено в схему 1 обработки. Схема 1 обработки может быть реализована автомобильной навигационной системой, такой как информационно-развлекательная система (IVI) в транспортном средстве, а устройство 7 управления транспортным средством может быть реализовано системой помощи в путешествии, такой как усовершенствованная система помощи водителю (ADAS).
[0022]
Модуль 11 генерации первого пути генерирует первый путь передвижения (навигационный путь; NDP) по меньшей мере, на основе картографической информации высокой четкости, хранящейся в модуле 41 хранения картографической информации высокой четкости. Первый путь передвижения - это путь передвижения при выполнении управления содействием поездке на рассматриваемом транспортном средстве. Например, модуль 11 генерации первого пути генерирует первый путь в полосе движения в картографической информации высокой четкости на основе картографической информации высокой четкости, сохраненной в модуле 41 хранения картографической информации высокой четкости, и текущей позиции рассматриваемого транспортного средства. Первый путь передвижения может быть сгенерирован так, чтобы проходить через середину полосы движения в картографической информации высокой четкости.
[0023]
Модуль 11 генерации первого пути может генерировать первый путь передвижения, чтобы привести рассматриваемое транспортное средство следовать предполагаемому маршруту передвижения от начальной позиции к месту назначения в информации навигационной карты, хранящейся в модуле 42 хранения информации навигационной карты, чтобы проходить по прямой или делать правый или левый поворот в пределах участка предполагаемого маршрута передвижения. Модуль 11 генерации первого пути может генерировать первый путь передвижения в пределах предварительно определенного участка из текущей позиции рассматриваемого транспортного средства в положение, имеющее заранее определенное расстояние от текущей позиции. Предопределенный участок может быть установлен соответствующим образом в пределах диапазона, который охватывает картографическая информация высокой четкости.
[0024]
Модуль 12 генерации второго пути генерирует второй путь передвижения, по меньшей мере, на основе окружения рассматриваемого транспортного средства, обнаруженного периферийным датчиком 3. Второй путь передвижения является возможностью в качестве пути передвижения при выполнении управления помощи путешествию на рассматриваемом транспортном средстве. Например, при выполнении управления предшествующим транспортным средством на рассматриваемом транспортном средстве модуль 12 генерации второго пути вычисляет траекторию передвижения предшествующего транспортного средства,
обнаруженную периферийным датчиком 3, и генерирует второй путь передвижения (путь следования автомобиля: CFP), используя вычисленную траекторию передвижения предшествующего транспортного средства. Например, траектория, следующая за средним положением предыдущего транспортного средства в направлении ширины транспортного средства, вычисляется как траектория передвижения предыдущего транспортного средства. Вторая траектория передвижения на основе траектории передвижения предыдущего транспортного средства установлена, например, на длину около 100 метров и последовательно обновляется по мере движения предыдущего транспортного средства вперед. Модуль 12 генерации второго пути может непосредственно использовать траекторию передвижения предыдущего транспортного средства для генерирования второго пути передвижения или может генерировать второй путь передвижения на основе смещенной траектории, смещенной от траектории передвижения предыдущего транспортного средства в направлении ширины полоса дороги. Используемый здесь термин «предшествующее транспортное средство» включает в себя не только транспортное средство, движущееся в той же полосе движения, что и рассматриваемое транспортное средство, но также транспортное средство, движущееся впереди рассматриваемого транспортного средства в том же направлении на той же дороге, что и рассматриваемое транспортное средство.
[0025]
Модуль 12 генерации второго пути может ссылаться на информацию навигационной карты, хранящуюся в модуле 42 хранения информации навигационной карты, чтобы генерировать второй путь передвижения. Например, модуль 12 генерации второго пути устанавливает пункт назначения в информации навигационной карты в соответствии с информацией о направлении, предоставленной пассажиром. Модуль 12 генерации второго пути выполняет поиск предполагаемого маршрута передвижения от текущей позиции (начальной позиции) рассматриваемого транспортного средства до пункта назначения в информации навигационной карты по алгоритму Дейкстры. Модуль 12 генерации второго пути генерирует второй путь передвижения в пределах полосы движения на основе окружения рассматриваемого транспортного средства, такого как, например, положения границ полосы движения, обнаруженные периферийным датчиком 3, например, чтобы привести рассматриваемое транспортное средство в соответствие с предполагаемым поиском маршрута передвижения, чтобы идти прямо или повернуть направо или налево.
[0026]
В качестве альтернативы, модуль 12 генерации второго пути может вычислять целевую траекторию на основе окружения рассматриваемого транспортного средства, такого как положения границ полосы движения, обнаруженных периферийным датчиком 3, без обращения к информации навигационной карты, хранящейся в модуле 42 хранения информации навигационной карты, чтобы сгенерировать второй путь передвижения с использованием вычисленной целевой траектории. Второй путь передвижения может быть путем передвижения рассматриваемого транспортного средства, управляемого вручную пассажиром. Модуль 12 генерации второго пути может генерировать второй путь передвижения в пределах заранее определенного участка из текущей позиции рассматриваемого транспортного средства в положение, имеющее заранее определенное расстояние от текущей позиции. Заданный участок может быть установлен соответствующим образом в пределах диапазона, позволяющего периферийному датчику 3 обнаруживать окружение, необходимое для управления содействием поездке для рассматриваемого транспортного средства.
[0027]
Модуль 13 определения переключения пути определяет, нужно ли рассматриваемому транспортному средству при движении по первому пути передвижения переключаться с первого пути передвижения на второй путь передвижения в соответствии с информацией о первом пути передвижения. Модуль 13 определения переключения пути определяет, что рассматриваемому транспортному средству необходимо переключиться с первого пути передвижения на второй путь передвижения, когда обнаруживается, что первый генерируемый путь передвижения должен закончиться позже во время движения по первому пути передвижения. Термин «позже», используемый в выражении «первый генерируемый путь передвижения должен заканчиваться позже», относится к прямой точке, имеющей заранее определенное расстояние от рассматриваемого транспортного средства, такой как позиция, удаленная от рассматриваемого транспортного средства на 300 метров, или точка в диапазоне, которую транспортное средство достигает через десять секунд. Состояние, в котором первый генерируемый путь передвижения должен заканчиваться позже, относится к заранее определенному условию, в котором первый путь передвижения определен как имеющий низкую надежность.
[0028]
Фигура 2 иллюстрирует случай, в котором транспортное средство (рассматриваемое транспортное средство) V, на котором установлено устройство для помощи в путешествии согласно варианту осуществления, движется по первому пути Р1 передвижения, сформированному вдоль полосы движения на многополосной дороге. Модуль 11 генерации первого пути генерирует первый путь Р1 передвижения вдоль полосы движения на основе картографической информации высокой четкости вокруг окружения транспортного средства V. Транспортное средство V расположено в первой секции s1, покрытой соответствующей картографической информацией высокой четкости.
[0029]
Когда конечная точка первой секции s1, которая соответствует концу картографической информации высокой четкости, присутствует перед транспортным средством V, вторая секция s2, не имеющая соответствующей картографической информации высокой четкости, присутствует впереди. Модуль 11 генерации первого пути не может генерировать первый путь Р1 передвижения во второй секции s2, не имея соответствующей картографической информации высокой четкости. Транспортное средство V не может продолжать движение вперед, если путь передвижения транспортного средства V не будет переключен с первого пути передвижения на второй путь передвижения. Модуль 13 определения переключения пути, таким образом, определяет, что транспортное средство V должно переключаться с первого пути Р1 передвижения на второй путь Р2 передвижения из-за низкой надежности первого пути Р1 пути, когда нет картографической информации высокой четкости перед первым путем передвижения Р1. Второй путь Р2 передвижения является путем, основанным на траектории передвижения предыдущего транспортного средства С1, движущегося в той же полосе, что и транспортное средство V.
[0030]
Модуль 13 определения переключения пути также определяет, что транспортное средство V должно переключаться с первого пути Р1 передвижения на второй путь Р2 передвижения из-за низкой надежности первого пути Р1 передвижения, когда приемник 21 GNSS имеет плохой прием сигнала от навигационных спутников. Плохой прием сигнала снижает точность позиционной информации транспортного средства V, считывая с низкой надежностью первый путь Р1 передвижения, по которому следует транспортное средство V. Примеры состояний плохого приема сигнала включают в себя состояние, в котором напряженность электрического поля сигналов, принимаемых приемником 21 GNSS, уменьшается, и состояние, в котором количество навигационных спутников, из которых приемник 21 GNSS может принимать сигналы, уменьшается. Приемник 21 GNSS при использовании приемника GPS принимает сигналы, как правило, от семи до восьми спутников, например. Приемник 21 GNSS может быть определен как находящийся в состоянии плохого приема сигнала, когда число спутников уменьшается до четырех или пяти из-за блокировки сигналов объектами, такими как туннели или здания.
[0031]
В качестве альтернативы, модуль 13 определения переключения пути может оценивать достоверность картографической информации высокой четкости на основе информации истории движения транспортного средства по дороге, на которой сформирована первый путь Р1 передвижения, и определить, что переключение на второй путь Р2 перемещения необходимо, когда достоверность картографической информации высокой четкости низкая. Например, когда схема 1 обработки обнаруживает разницу между картографической информацией высокой четкости и окружающим состоянием, таким как фигура дороги, полученная периферийным датчиком 3 во время передвижения по дороге, имеющей первый путь Р1 передвижения, схема 1 обработки ассоциирует различие между фактическим окружающим состоянием и картографической информацией высокой четкости с позиционной информацией транспортного средства V, и сохраняет связанную информацию в качестве исторической информации. Модуль 13 определения переключения пути затем определяет, что достоверность картографической информации высокой четкости является низкой в соответствии с исторической информацией, когда транспортное средство V движется в секции, в которой разница между фактическим окружающим состоянием и картографической информацией высокой четкости является заданным порогом или больше. Цель для информации об истории путешествий не ограничивается транспортным средством V и может быть любыми другими транспортными средствами. Информация об истории путешествий должна быть получена только блоком 13 определения переключения пути через устройство 33 связи от сервера, подключенного к внешней сети.
[0032]
Модуль 14 установки секции перехода устанавливает секцию sT перехода между точкой, в которой транспортное средство V начинает осуществлять переход от первого пути Р1 передвижения ко второму пути Р2 передвижения, и точкой, в которой транспортное средство V заканчивает переход, в соответствии с например, скоростью транспортного средства, определяемой датчиком 2 транспортного средства. Фигура 2 иллюстрирует случай, в котором первый путь Р1 передвижения и второй путь Р2 передвижения проходят по прямой дороге в одной и той же полосе движения. Переходная секция sT предпочтительно задается так, чтобы начальная точка находилась за конечной точкой первой секции s1 на расстояние точки обзора передней стороны (расстояние от транспортного средства V до точки обзора передней стороны) или больше. Поскольку расстояние до точки обзора передней стороны больше, так как скорость транспортного средства выше, модуль 14 установки переходной секции вычисляет расстояние точки обзора передней стороны в соответствии с предварительно определенной функцией, используя, например, скорость транспортного средства в качестве переменной. Конечная точка переходной секции sT не обязательно установлена на конечную точку первой секции s1 и может быть установлена на точку позади конечной точки первой секции s1.
[0033]
Переходная секция sT имеет минимальное расстояние, определяемое блоком 14 установки переходной секции с точки зрения безопасности между конечной точкой первой секции s1 и точкой позади конечной точки первой секции si на расстоянии точки обзора передней стороны. Это приводит к тому, что расстояние будет больше, что позволяет транспортному средству V продолжать движение по первому пути Р1 на основе картографической информации высокой четкости. Например, когда второй путь Р2 передвижения является траекторией передвижения предыдущего транспортного средства С1, второй путь Р2 передвижения изменяется в зависимости от поведения предыдущего транспортного средства С1. Разрешение транспортному средству V продолжать движение по первому пути Р1 передвижения во время генерирования увеличивает расстояние, позволяющее надежное автономное вождение.
[0034]
Как описано выше, модуль 14 установки секции перехода устанавливает секцию sT перехода в области, в которой генерируется первый путь Р1 передвижения, который находится в пределах первой секции s1, покрытой картографической информацией высокой четкости. Транспортное средство V, таким образом, может начинать и завершать переход ко второму пути Р2 передвижения во время передвижения в первой секции s1, в которой первый путь Р1 передвижения может быть сформирован. Транспортное средство V, таким образом, может осуществлять переход ко второму пути Р2 передвижения в состоянии, способном обнаруживать относительное положение между первым путем Р1 передвижения и вторым путем Р2 передвижения. Это может предотвратить нерегулярное поведение транспортного средства V при переключении с первого пути Р1 передвижения на основе картографической информации высокой четкости на второй путь Р2 передвижения, что приводит к плавному переключению.
[0035]
Например, когда предшествующее транспортное средство С1 передвигается по другой полосе движения, отличной от полосы движения транспортного средства V, как показано на фиг. 3, второй путь Р2 передвижения, основанный на траектории передвижения предыдущего транспортного средства С1, отклоняется от первого пути Р1 передвижения по сравнению со случаем на фиг. 2. Затем модуль 14 установки переходной секции вычисляет величину отклонения между путем Р1 передвижения и вторым путем Р2 передвижения, чтобы регулировать секцию sT перехода, чтобы она была больше по мере увеличения величины отклонения. Величина отклонения - это расстояние, например, между первым и вторым путями передвижения в направлении ширины дороги. Переходная секция sT в случае, показанном на фиг. 2, может быть короче, поскольку величина отклонения между путем Р1 передвижения и вторым путем Р2 передвижения меньше. Это позволяет транспортному средству V плавно переходить от первого пути Р1 передвижения ко второму пути Р2 передвижения.
[0036]
Модуль 14 установки переходной секции также может регулировать переходную секцию sT, чтобы она была более длинной, поскольку кривизна дороги, на которой генерируется первый путь Р1 передвижения, больше. Кривизна дороги может быть получена периферийным датчиком 3 или может быть получена из модуля 41 хранения картографической информации высокой четкости или модуля 42 хранения информации навигационной карты. Когда дорога первого пути Р1 передвижения прямая, длина переходной секции sT может быть сокращена, поскольку переключение на второй путь Р2 передвижения относительно легкое, чтобы быстро выполнить переход ко второму пути Р2 передвижения.
[0037]
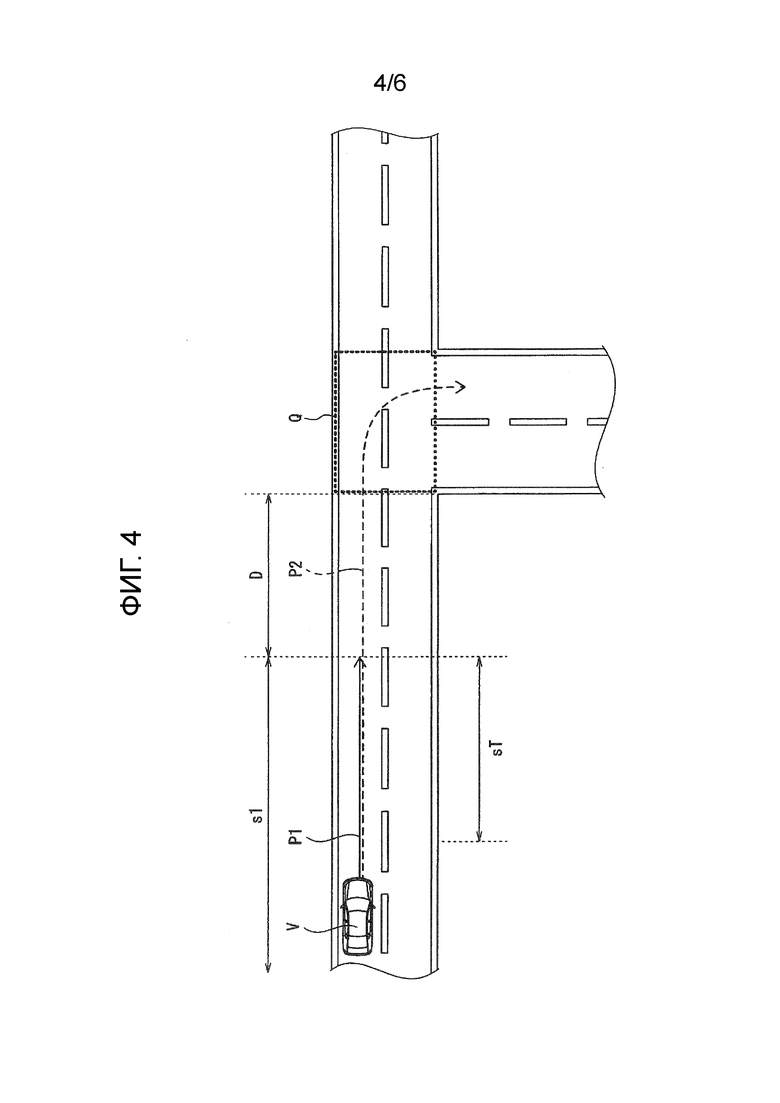
Фигура 4 иллюстрирует случай заранее определенной дорожной структуры, обнаруженной перед первым путем Р1 передвижения, по которому движется транспортное средство V, такой как перекресток Q, на котором транспортное средство V должно повернуть направо, и для транспортного средства целесообразно следовать второму пути Р2 передвижения. Модуль 14 установки секции перехода в этом случае устанавливает секцию sT перехода в пределах диапазона от точки за конечной точкой первой секции s1 на заранее определенное расстояние до конечной точки первой секции s1, которая является концом картографической информации высокой четкости. Заданная дорожная конструкция может быть местом, требующим поворота вправо или влево, в дополнение к перекрестку. Модуль 14 установки секции перехода может установить текущую позицию транспортного средства V в качестве начальной точки секции sT перехода, когда расстояние D от конечной точки первой секции s1 до пересечения Q короче, чем предварительно определенный порог. Это предотвращает внезапный переход транспортного средства V при приближении к перекрестку Q, на котором целесообразно использовать второй путь Р2 передвижения, чтобы обеспечить плавный и безопасный переход.
[0038]
Как показано на фиг. 5, например, модуль 15 определения пути оценивает надежность каждого из вторых путей передвижения Р2_1 и Р2_2, сгенерированных модулем 12 генерации второго пути, и определяет вторую дорогу передвижения, имеющую более высокую надежность, в качестве пути передвижения, который должен переключаться с первого пути Р1. Например, модуль 15 определения пути оценивает надежность второго пути передвижения Р2_1 или Р2_2 как более высокую, поскольку величина отклонения от первого пути передвижения Р1 меньше. Фигура 5 иллюстрирует случай, в котором определено, что надежность выше для второго пути Р2_1 передвижения на основе траектории передвижения предыдущего транспортного средства С1, движущегося в той же полосе движения, что и транспортное средство V, чем для второго пути Р2_2 передвижения на основе траектории передвижения предыдущего транспортного средства С2, едущего в соседней полосе движения. Модуль 15 определения пути может оценивать надежность второго пути передвижения Р2_1 или Р2_2 как более высокую, поскольку отклонение в поперечном направлении меньше. Поскольку предыдущее транспортное средство С2 выполняет смену полосы движения во время обнаружения периферийным датчиком 3 в случае, показанном на фиг. 5, оценивается, что второй путь Р2_2 передвижения имеет меньшую надежность, чем путь Р2_1 передвижения предыдущего транспортного средства С2, продолжающего движение прямо.
[0039]
В качестве альтернативы, модуль 15 определения пути может оценить, что второй путь Р2 передвижения предыдущего транспортного средства, движущегося в том же направлении, что и транспортное средство V, имеет более высокую надежность. В частности, когда предполагаемый маршрут передвижения транспортного средства V установлен, модуль 15 определения пути может оценить, что второй путь Р2 передвижения имеет более высокую надежность, которая является траекторией передвижения предыдущего транспортного средства, движущегося в полосе движения вдоль предполагаемого маршрута передвижения перед разветвленной дорогой. Поскольку предполагается, что предыдущее транспортное средство, движущееся по полосе движения в направлении, отличном от направления первого пути Р1 передвижения, отклоняется от доступного диапазона, обнаруженного периферийным датчиком 3, независимо от установки предполагаемого маршрута передвижения, второй путь Р2 передвижения, следующая за предшествующим транспортным средством, не может генерироваться непрерывно.
Ввиду этого модуль 15 определения пути может оценивать надежность второму пути Р2 передвижения предыдущего транспортного средства, движущегося в направлении, отличном от направления движения транспортного средства V, которое должно быть ниже, чтобы исключить соответствующий второй путь Р2 передвижения из возможных путей передвижения, на которые транспортное средство V может переключиться.
[0040]
В качестве альтернативы, модуль 15 определения пути может оценивать надежность второго пути Р2 предыдущего транспортного средства как более высокую, так как относительная скорость предыдущего транспортного средства, следующего по второму пути Р2, относительно транспортного средства V меньше. Например, когда относительная скорость предшествующего транспортного средства слишком велика или слишком мала, предполагается, что предшествующее транспортное средство отклоняется от диапазона обнаружения периферийного датчика 3, и поэтому второй путь передвижения Р2, следующий за траекторией передвижения соответствующего предшествующего транспортного средства, не может генерироваться непрерывно. Таким образом, модуль 15 определения пути может оценивать надежность второго пути Р2 следования, следующего за предыдущим транспортным средством, так, чтобы он был ниже, когда скорость предыдущего транспортного средства относительно транспортного средства V находится за пределами предварительно определенного диапазона, чтобы исключить возможности путей передвижения, на которые транспортное средство V может переключаться.
[0041]
Модуль 16 генерирования траектории генерирует траекторию ТТ перехода, как показано на фиг. 2 и фиг. 3, которая является траекторией передвижения транспортного средства V, осуществляющего переход от первого пути Р1 передвижения ко второму пути Р2 передвижения в качестве целевого пути передвижения, определенного блоком 15 определения пути. Траектория ТТ перехода является траекторией, в которой транспортное средство V выполняет переход от первого пути Р1 передвижения ко второму пути Р2 передвижения между начальной точкой и конечной точкой секции sT перехода, установленной и регулируемой модулем 14 установки секции перехода. Модуль 16 генерирования траектории генерирует траекторию ТТ перехода так, что ускорение и угловая скорость транспортного средства V во время перехода от первого пути Р1 передвижения ко второму пути Р2 передвижения задаются в пределах предварительно определенного диапазона.
[0042]
Модуль 17 управления представлением управляет
пользовательским I/F 5 для представления направляющей информации, указывающей, что транспортное средство V осуществляет переход от первого пути Р1 передвижения ко второму пути Р2 передвижения по траектории ТТ перехода, сформированной модулем 16 формирования траектории, например. В качестве альтернативы, модуль 17 управления представлением может управлять пользовательским I/F 5 для представления направляющей информации, побуждающей водителя двигаться по траектории ТТ перехода.
[0043]
Пользовательский I/F 5 включает в себя устройство 51 ввода, дисплей 52 и динамик 53. Примеры устройства 51 ввода включают в себя указательное устройство, включающее в себя сенсорную панель, микрофон, клавиатуру и различные типы переключателей. Устройство 51 ввода получает от пассажира различную информацию, такую как установка пункта назначения рассматриваемого транспортного средства, инструкции по переключению между автономным вождением и ручным вождением и разрешение на переключение с первого пути Р1 передвижения на второй путь передвижения Р2. Дисплей 52 может быть жидкокристаллическим дисплеем (LCD), например, и отображать изображение, указывающее текстовую информацию или значки, в соответствии с управляющим сигналом от модуля 17 управления представлением. Динамик 53 выводит голос или звук уведомления в соответствии с управляющим сигналом от модуля 17 управления представлением.
[0044]
Устройство 7 управления транспортным средством выдает управляющий сигнал для управления исполнительным механизмом 6, чтобы привести рассматриваемое транспортное средство в движение по первому пути Р1 передвижения, траектории ТТ перехода и второму пути Р2 передвижения. Устройство 7 управления транспортным средством может выполнять автономное вождение для автономного вождения без участия пассажира, участвующего в какой-либо операции, или выполнять автономное вождение для управления по меньшей мере одной из операций вождения, торможения и рулевого управления. Устройство 7 управления транспортным средством может выполнять управление ускорением/замедлением, чтобы приблизить текущую скорость рассматриваемого транспортного средства к скорости предыдущего транспортного средства, чтобы следовать предыдущему транспортному средству, которое является основой второму пути Р2 передвижения в траектории ТТ перехода.
[0045]
Исполнительный механизм 6 управляет состоянием передвижения рассматриваемого транспортного средства в соответствии с управляющим сигналом от устройства 7 управления транспортным средством. Привод 6 содержит приводной механизм 61, тормозной привод 62 и рулевой привод 63. Приводной механизм 61 представляет собой, например, дроссельный клапан с электронным управлением, который управляет акселератором рассматриваемого транспортного средства, чтобы регулировать степень открытия в соответствии с управляющим сигналом от устройства 7 управления транспортным средством. Тормозной привод 62 является, например, гидравлическим контуром и управляет операцией торможения тормоза рассматриваемого транспортного средства в соответствии с управляющим сигналом от устройства 7 управления транспортным средством. Рулевой привод 63 управляет рулевым управлением рассматриваемого транспортного средства в соответствии с управляющим сигналом от устройства 7 управления транспортным средством.
[0046]
(Способ помощи в путешествии)
Способ помощи в путешествии с использованием устройства помощи в путешествии в соответствии с вариантом осуществления настоящего изобретения иллюстрируется ниже со ссылкой на блок-схему последовательности операций на фиг. 6.
[0047]
На этапе S1 модуль 11 генерации первого пути генерирует первый путь P1 передвижения, который является текущим путем передвижения рассматриваемого транспортного средства, на основе картографической информации высокой четкости, хранящейся в блоке 41 хранения картографической информации высокой четкости. Например, модуль 11 генерации первого пути извлекает дорожную структуру впереди рассматриваемого транспортного средства из картографической информации высокой четкости, хранящейся в модуле 41 хранения картографической информации высокой четкости, чтобы сгенерировать первый путь Р1 передвижения в пределах полосы движения на основе извлеченной структуры дороги.
[0048]
На этапе S2 модуль 12 генерации второго пути генерирует второй путь Р2 передвижения, который является возможностью в качестве пути передвижения, по которому следует рассматриваемое транспортное средство, на основании окружения рассматриваемого транспортного средства, обнаруженного периферийным датчиком 3. Например, модуль 12 генерации второго пути вычисляет траекторию передвижения предыдущего транспортного средства, обнаруженную периферийным датчиком 3, и генерирует второй путь Р2 передвижения на основе вычисленной траектории передвижения предыдущего транспортного средства. Траектория передвижения предыдущего транспортного средства обновляется последовательно в связи с движением предыдущего транспортного средства, так что второй путь Р2 передвижения генерируется последовательно. Модуль 12 генерации второго пути дополнительно генерирует соответствующие вторые пути Р2 передвижения, соответствующие количеству предшествующих транспортных средств.
[0049]
На этапе S3 модуль 13 определения переключения пути определяет, нужно ли рассматриваемому транспортному средству переключаться с первого пути передвижения на второй путь передвижения во время передвижения по первому пути передвижения. Например, модуль 13 определения переключения пути определяет, что переключение с первого пути передвижения на второй путь передвижения необходимо при обнаружении того, что первый генерируемый путь передвижения должен закончиться позже, поскольку нет картографической информации высокой четкости впереди первого пути передвижения. Процесс переходит к этапу S4, когда определено, что ведущему транспортному средству необходимо переключиться на второй путь передвижения, и процесс возвращается к этапу S1, когда определено, что нет необходимости переключаться на второй путь передвижения.
[0050]
На этапе S4 модуль 14 установки секции перехода устанавливает секцию sT перехода между точкой, в которой транспортное средство V начинает осуществлять переход от первого пути Р1 передвижения ко второму пути Р2 передвижения, и точкой, в которой транспортное средство V заканчивает переход. Модуль 14 установки секции перехода генерирует секцию sT перехода, позволяющую транспортному средству V плавно переходить на второй путь Р2 передвижения, на основе скорости транспортного средства V, траектории передвижения предыдущего транспортного средства, скорости предыдущего транспортного средства и дорожного рисунка первого пути Р1 передвижения. Секция sT перехода устанавливается для каждого второго пути перемещения, сгенерированного на этапе S2.
[0051]
На этапе S5, когда на этапе S2 генерируется множество вторых путей передвижения Р2, модуль 15 определения пути оценивает надежность соответствующих вторых путей передвижения Р2. Когда соответствующие пути Р2 передвижения являются предшествующими путями следования транспортного средства, модуль 15 определения пути оценивает надежность соответствующих вторых путей Р2 передвижения в соответствии с величиной отклонения от первого пути Р1 передвижения, степенью отклонения в боковом направлении или направления движения и относительной скорости соответствующего предыдущего транспортного средства.
[0052]
На этапе S6 модуль 15 определения пути определяет второй путь Р2 передвижения, имеющий самую высокую надежность, оцененную на этапе S5, как путь передвижения, который должен переключаться с первого пути передвижения.
[0053]
На этапе S7 модуль 16 генерирования траектории генерирует траекторию ТТ перехода для осуществления перехода от первого пути Р1 передвижения ко второму пути Р2 передвижения в секции sT перехода, соответствующей второму пути Р2 передвижения, определенному на этапе S6. Устройство 7 управления транспортным средством управляет исполнительным механизмом 6, чтобы вести рассматриваемое транспортное средство по траектории ТТ перехода, чтобы осуществить переход от первому пути Р1 передвижения ко второму пути Р2 передвижения.
[0054]
Устройство помощи движению в соответствии с настоящим вариантом осуществления предварительно обнаруживает, что первый генерируемый путь Р1 передвижения должен закончиться, чтобы управлять рассматриваемым транспортным средством, чтобы следовать второму пути Р2, в то время как первый путь Р1 передвижения еще генерируется. Рассматриваемое транспортное средство, если оно переключается на второй путь Р2 передвижения после въезда в участок, в котором не сформирован первый путь Р1 передвижения, может вызвать нерегулярное поведение из-за большого отклонения между соответствующими путями. Устройство помощи в движении в соответствии с настоящим вариантом осуществления может привести к тому, что рассматриваемое транспортное средство переключится с первого пути Р1 передвижения на второй путь Р2 передвижения в состоянии, способном обнаруживать относительное положение между первым путем Р1 передвижения и вторым путем Р2 передвижения. Таким образом, устройство помощи в движении может предотвращать нерегулярное поведение рассматриваемого транспортного средства при переключении с первого пути Р1 передвижения на основе картографической информации высокой четкости на другой второй путь Р2 передвижения, чтобы плавно переключаться между путями передвижения соответствующим образом.
[0055]
Устройство помощи в путешествии в соответствии с настоящим вариантом осуществления может выполнять определение необходимости переключения пути передвижения на основании картографической информации на заранее определенном расстоянии от рассматриваемого транспортного средства, независимо от наличия или отсутствия картографической информации в местоположении вне предопределенного расстояния. Это может сократить период, в течение которого генерируется первый путь передвижения после переключения на второй путь Р2 передвижения, что может увеличить период во время движения по первому пути Р1 передвижения. Увеличение периода путешествия на основе картографической информации может позволить рассматриваемому транспортному средству сохранять стабильное поведение во время путешествия.
[0056]
Устройство помощи при перемещении в соответствии с настоящим вариантом осуществления определяет, что переключение на второй путь Р2 передвижения необходимо при заранее определенном условии, в котором первый путь Р1 передвижения определен как имеющий низкую надежность. Это определение может привести к тому, что рассматриваемое транспортное средство будет следовать по второму пути Р2 передвижения перед тем, как первый путь Р1 передвижения будет иметь низкую надежность, чтобы обеспечить стабильную помощь при движении.
[0057]
Устройство помощи при путешествии в соответствии с настоящим вариантом осуществления определяет, что первый путь Р1 передвижения имеет низкую надежность, когда нет картографической информации перед первым путем Р1 передвижения. Предварительное обнаружение того, что рассматриваемое транспортное средство должно двигаться во второй секции s2, в которой отсутствует картографическая информация высокой четкости, позволяет рассматриваемому транспортному средству переключаться на второй путь Р2 передвижения во время генерации первого пути Р1 передвижения, чтобы добиться стабильной помощи в поездках.
[0058]
Устройство помощи при путешествии в соответствии с настоящим вариантом осуществления определяет, что первый путь Р1 передвижения имеет низкую надежность, когда прием сигналов, передаваемых с навигационных спутников, плохой. Это определение может привести к тому, что рассматриваемое транспортное средство будет следовать по второму пути Р2 перед первым путем Р1 передвижения с меньшим доверием, чтобы достигать стабильной помощи в движении.
[0059]
Устройство помощи в путешествии в соответствии с настоящим вариантом осуществления определяет, что первый путь Р1 передвижения имеет низкую надежность в секции с картографической информацией, определенной как имеющей низкую надежность, в соответствии с информацией об истории движения транспортного средства по дороге, имеющей первый путь Р1 передвижения. Это определение может привести к тому, что рассматриваемое транспортное средство будет следовать по второму пути Р2 перед первым путем Р1 передвижения с меньшим доверием, чтобы достигать стабильной помощи в движении.
[0060]
Устройство помощи в путешествии в соответствии с настоящим вариантом осуществления, способное генерировать первый путь передвижения на основе картографической информации высокой четкости, обеспечивает стабильное перемещение по первому пути передвижения, соответствующее окружающим условиям.
[0061]
Устройство помощи в путешествии в соответствии с настоящим вариантом осуществления может привести к тому, что рассматриваемое транспортное средство начнет переход ко второму пути Р2 передвижения во время движения в первой секции si, охватываемой картографической информацией высокой четкости. А именно, переход от первого пути Р1 передвижения ко второму пути Р2 передвижения может быть начат в состоянии, способном обнаруживать местоположение рассматриваемого транспортного средства в картографической информации высокой четкости. Это может предотвратить нерегулярное поведение рассматриваемого транспортного средства, чтобы плавно переключаться между путями передвижения.
[0062]
Устройство помощи в путешествии в соответствии с настоящим вариантом осуществления может привести к тому, что рассматриваемое транспортное средство завершит переход ко второму пути Р2 передвижения во время движения в первой секции s1, покрытой картографической информацией высокой четкости. А именно, переход от первого пути Р1 передвижения ко второму пути Р2 передвижения может быть завершен в состоянии, способном обнаруживать местоположение рассматриваемого транспортного средства в картографической информации высокой четкости. Это может продлить надежное автономное вождение дольше и может предотвратить неправильное поведение рассматриваемого транспортного средства, чтобы плавно переключаться между путями передвижения. Когда второй путь Р2 передвижения является предшествующим путем следования транспортного средства, соответствие между конечной точкой переходной секции sT и конечной точкой первой секции s1 увеличивает время, используемое для оценки надежности первого пути Р2 передвижения, чтобы определить второй путь Р2 передвижения, имеющий более высокую надежность в качестве целевого пути передвижения.
[0063]
Устройство помощи при движении в соответствии с настоящим вариантом осуществления может регулировать начальную точку и конечную точку переходной секции sT в зависимости от окружения рассматриваемого транспортного средства. Это может обеспечить расстояние, подходящее для перехода от первого пути Р1 передвижения ко второму пути Р2 передвижения, чтобы предотвратить нерегулярное поведение рассматриваемого транспортного средства для достижения плавного и безопасного перехода.
[0064]
Устройство помощи при перемещении в соответствии с настоящим вариантом осуществления устанавливает переходную секцию sT как более длинную, поскольку величина отклонения между первым путем передвижения Р1 и вторым путем передвижения Р2 больше. Это может обеспечить расстояние, подходящее для перехода от первого пути Р1 передвижения ко второму пути Р2 передвижения, чтобы предотвратить нерегулярное поведение рассматриваемого транспортного средства для достижения плавного и безопасного перехода.
[0065]
Устройство помощи при перемещении в соответствии с настоящим вариантом осуществления устанавливает переходную секцию sT как более длинную, поскольку кривизна дороги, на которой генерируется первый путь Р1 передвижения, больше. Это может обеспечить расстояние, подходящее для перехода от первого пути Р1 передвижения ко второму пути Р2 передвижения, чтобы предотвратить нерегулярное поведение рассматриваемого транспортного средства для достижения плавного и безопасного перехода.
[0066]
Устройство помощи при перемещении в соответствии с настоящим вариантом осуществления переключается с первого пути Р1 передвижения на второй путь Р2 передвижения, когда заранее определенная дорожная структура присутствует перед рассматриваемым транспортным средством, в котором целесообразно использование второго пути Р2 передвижения. Это позволяет рассматриваемому транспортному средству следовать по второму пути Р2 передвижения, определенному как подходящий в заданной структуре дороги, такой как перекресток, для достижения стабильного движения.
[0067]
Когда расстояние между рассматриваемым транспортным средством и предварительно определенной структурой дороги меньше порогового значения, рассматриваемое транспортное средство может начать переход ко второму пути Р2 передвижения из текущей позиции. Это может избежать нежелательного внезапного перехода в ситуации, в которой требуется переключение на второй путь Р2 передвижения, чтобы предотвратить нерегулярное поведение рассматриваемого транспортного средства для достижения плавного и безопасного перехода.
[0068]
Когда генерируется множество вторых путей Р2 передвижения, устройство помощи в путешествии в соответствии с настоящим вариантом осуществления может определять второй путь передвижения, имеющий самую высокую надежность, в качестве целевого пути передвижения. Надежность соответствующих вторых путей передвижения Р2 может быть оценена, например, в соответствии с величиной отклонения от первого пути передвижения Р1 или степенью отклонения в поперечном направлении. Это может предотвратить нерегулярное поведение транспортного средства, чтобы обеспечить плавный и безопасный переход.
[0069]
Когда второй путь Р2 передвижения является предшествующим путем следования транспортного средства, рассматриваемое транспортное средство может следовать второму пути Р2 передвижения, сохраняя автономное движение без прерывания в конечной точке первого пути Р1 передвижения. Когда генерируется множество вторых путей Р2 передвижения, надежность соответствующих вторых путей Р2 передвижения может быть оценена, например, в соответствии с направлением движения и относительной скоростью соответствующих предшествующих транспортных средств. Это позволяет установить второй путь Р2 передвижения, имеющий наивысшую надежность, в качестве целевого пути передвижения, чтобы предотвратить нерегулярное поведение рассматриваемого транспортного средства для достижения плавного и безопасного перехода.
[0070]
(Другие варианты осуществления) Хотя настоящее изобретение было описано выше со ссылкой на вариант осуществления, следует понимать, что настоящее изобретение не предназначено для ограничения описаниями и чертежами, составляющими часть этого раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники в соответствии с этим раскрытием. Следует понимать, что настоящее изобретение включает в себя различные варианты осуществления, не раскрытые в данном документе, такие как конфигурация, к которой необязательно применяются соответствующие конфигурации, как описано в вышеупомянутом варианте осуществления. Следовательно, технический объем настоящего изобретения определяется только предметом в соответствии с формулой изобретения, полученной из предшествующего описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2742400C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2768417C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2767830C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2754705C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2767846C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2774521C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2768091C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2763452C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2783421C2 |
| СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2641023C2 |




Изобретение относится к способу и устройству помощи в путешествии. Способ помощи в путешествии включает в себя этапы, на которых обнаруживают окружение ведущего транспортного средства, генерируют первый маршрут передвижения на основе картографической информации вокруг ведущего транспортного средства и генерируют второй путь передвижения на основе окружающей среды. Если определяют, что переключение с первого пути передвижения на второй путь передвижения необходимо при обнаружении того, что первая генерируемая траектория передвижения должна заканчиваться впереди ведущего транспортного средства, пока ведущее транспортное средство движется по первому пути передвижения, управляют ведущим транспортным средством для осуществления перехода от первого пути передвижения ко второму пути передвижения, когда определено, что переключение необходимо. Достигается повышение эффективности построения маршрута путешествия. 2 н. и 19 з.п. ф-лы, 6 ил.
1. Способ помощи в путешествии, включающий в себя этапы, на которых
обнаруживают окружение рассматриваемого транспортного средства;
генерируют первый путь передвижения на основе картографической информации вокруг окружения рассматриваемого транспортного средства;
генерируют второй путь передвижения на основе окружающей среды;
определяют, что переключение с первого пути передвижения на второй путь передвижения необходимо при обнаружении того, что первый генерируемый путь передвижения должен заканчиваться впереди рассматриваемого транспортного средства, пока рассматриваемое транспортное средство движется по первому пути передвижения; и
управляют рассматриваемым транспортным средством для осуществления перехода от первого пути передвижения ко второму пути передвижения, когда определено, что переключение необходимо.
2. Способ помощи в путешествии по п. 1, дополнительно содержащий этап, на котором устанавливают переходную секцию для переключения с первого пути передвижения на второй путь передвижения, когда рассматриваемое транспортное средство передвигается по первому пути передвижения.
3. Способ помощи в путешествии по п. 1 или 2, в котором переключение с первого пути передвижения на второй путь передвижения определяется как необходимое, когда первый генерируемый путь передвижения должен заканчиваться в точке, предшествующей рассматриваемому транспортному средству, на предварительно определенном расстоянии.
4. Способ помощи в путешествии по любому из пп. 1-3, в котором переключение с первого пути передвижения на второй путь передвижения определяется как необходимое при заранее определенном условии, в котором картографическая информация вокруг окружения рассматриваемого транспортного средства определена как имеющая низкую надежность.
5. Способ помощи в путешествии по п. 4, в котором заранее определенное условие представляет собой состояние, в котором картографическая информация отсутствует перед первым путем передвижения.
6. Способ помощи в путешествии по п. 4, в котором заранее определенное условие представляет собой состояние, в котором приемник для получения информации о местоположении рассматриваемого транспортного средства на основе сигнала, принятого от навигационного спутника, имеет плохой прием сигнала.
7. Способ помощи в путешествии по п. 4, в котором заранее определенное условие представляет собой состояние, в котором картографическая информация определена как имеющая низкую надежность в соответствии с исторической информацией транспортного средства, движущегося по дороге, в которой сформирован первый путь передвижения.
8. Способ помощи в путешествии по любому из пп. 1-7, в котором картографическая информация является картографической информацией высокой четкости, включающей в себя информацию о местоположении в полосе.
9. Способ помощи в путешествии по любому из пп. 1-8, в котором переход начинается, когда рассматриваемое транспортное средство движется и следует по первому пути передвижения.
10. Способ помощи в путешествии по любому из пп. 1-9, в котором переход завершается, когда рассматриваемое транспортное средство движется и следует по первому пути передвижения.
11. Способ помощи в путешествии по любому из пп. 1-10, дополнительно содержащий регулирование участка от начальной точки до конечной точки перехода в соответствии с окружением.
12. Способ помощи в путешествии по п. 11, дополнительно содержащий этап, на котором вычисляют величину отклонения между первым путем передвижения и вторым путем передвижения,
при этом длина участка от начальной точки до конечной точки перехода увеличивается по мере увеличения отклонения.
13. Способ помощи в путешествии по п. 11 или 12, в котором длина участка от начальной точки до конечной точки перехода увеличивается по мере того, как кривизна дороги первого пути передвижения увеличивается.
14. Способ помощи в путешествии по любому из пп. 1-13, в котором рассматриваемое транспортное средство управляется так, чтобы осуществлять переход от первого пути передвижения ко второму пути передвижения, когда заранее определенная дорожная структура обнаруживается впереди рассматриваемого транспортного средства, когда первый путь передвижения генерируется впереди рассматриваемого транспортного средства.
15. Способ помощи в путешествии по п. 14, в котором переход начинается с текущей позиции рассматриваемого транспортного средства, когда расстояние от рассматриваемого транспортного средства до предварительно определенной дорожной конструкции меньше предварительно определенного порогового значения.
16. Способ помощи в путешествии по любому из пп. 1-15, дополнительно содержащий этапы, на которых:
генерируют множество вторых путей передвижения, каждый из которых соответствует второму пути передвижения, на основе окружения; и
оценивают надежность каждого второго пути передвижения, при этом рассматриваемое транспортное средство управляется, чтобы осуществлять переход от первого пути передвижения ко второму пути передвижения, имеющему более высокую надежность, когда определено, что переключение необходимо.
17. Способ помощи в путешествии по п. 16, в котором надежность каждого второго пути передвижения оценивается как более высокая, поскольку величина отклонения от первого пути передвижения меньше.
18. Способ помощи в путешествии по п. 16 или 17, в котором надежность каждого второго пути передвижения оценивается как более высокая, поскольку отклонение в поперечном направлении меньше.
19. Способ помощи в путешествии по любому из пп. 16-18, в котором:
каждый второй путь передвижения является траекторией предыдущего транспортного средства впереди рассматриваемого транспортного средства; и
надежность каждого второго пути передвижения оценивается как более высокая, когда предыдущее транспортное средство движется в направлении, идентичном направлению движения рассматриваемого транспортного средства.
20. Способ помощи в путешествии по любому из пп. 16-18, в котором:
каждый второй путь передвижения является траекторией предыдущего транспортного средства впереди рассматриваемого транспортного средства; и
надежность каждого второго пути передвижения оценивается как более высокая, так как относительная скорость предыдущего транспортного средства относительно рассматриваемого транспортного средства меньше.
21. Устройство помощи в путешествии, содержащее:
датчик, сконфигурированный для обнаружения окружения рассматриваемого транспортного средства;
модуль генерации первого пути, сконфигурированный для генерации первого пути передвижения на основе картографической информации вокруг окружения рассматриваемого транспортного средства;
модуль генерации второго пути, сконфигурированный для генерации второго пути передвижения на основе окружения;
модуль определения переключения пути, сконфигурированный для определения того, что переключение с первого пути передвижения на второй путь передвижения необходимо, когда обнаружено, что первый генерируемый путь передвижения должен заканчиваться впереди рассматриваемого транспортного средства, в то время как рассматриваемое транспортное средство движется по первому пути передвижения; и
схему управления транспортным средством, сконфигурированную для управления рассматриваемым транспортным средством для осуществления перехода от первого пути передвижения ко второму пути передвижения, когда определено, что переключение необходимо.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| УСТРОЙСТВО ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2624373C1 |

