ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способу содействия при вождении и устройству содействия при вождении.
Предпосылки изобретения
[0002]
В PTL 1 описывается блок хранения картографических данных, в котором содержится информация о разности уровней, относящаяся к разности уровней на въезде на объект, который транспортному средству требуется проехать при въезде на упомянутый объект с дороги, и информация о объекте, относящаяся к этому объекту, хранящиеся в ассоциации друг с другом. Описано, что для транспортного средства, которое должно въехать на объект, сохраненная информация о позиции разности уровней предоставляется вместе с информацией о наземном объекте.
СПИСОК ЦИТАТ
Патентная литература
[0003]
PTL1: JP 2019-144030 А
Сущность изобретения
Техническая задача
[0004]
Когда во время преодоления транспортным средством разности уровней направление движения транспортного средства наклонено по отношению к направлению прохождения разности уровней, к управляемым колесам транспортного средства прикладывается помеха, и происходит отклонение направления движения транспортного средства. Следовательно, когда при беспилотном управлении транспортное средство вынуждено самостоятельно двигаться по предустановленной целевой траектории движения, происходит отклонение от целевой траектории движения.
Цель настоящего изобретения состоит в том, чтобы при содействии вождению управлять собственным транспортным средством таким образом, чтобы собственное транспортное средство двигалось по целевой траектории движения, уменьшать отклонение от целевой траектории движения, когда собственное транспортное средство преодолевает разность уровней.
РЕШЕНИЕ ПРОБЛЕМЫ
[0005]
В соответствии с аспектом настоящего изобретения обеспечен способ содействия при вождении для управления собственным транспортным средством с помощью контроллера таким образом, чтобы собственное транспортное средство двигалось по целевой траектории движения, причем способ включает в себя: получение информации о разности уровней некоторой разности уровней, существующей вдоль полосы движения, по которой движется собственное транспортное средство; и когда на основе информации о разности уровней определяется, что собственное транспортное средство должно преодолевать разность уровней, генерирование целевой траектории движения таким образом, что угол преодоления разности уровней, который представляет собой угол, образованный разностью уровней и целевой траекторией движения, больше порогового значения.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0006]
В соответствии с одним из аспектов настоящего изобретения при содействии при вождении можно управлять собственным транспортным средством таким образом, чтобы собственное транспортное средство двигалось по целевой траектории движения, уменьшать отклонение от целевой траектории движения, когда собственное транспортное средство преодолевает разность уровней.
Цель и преимущества изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются примерными и пояснительными и не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007]
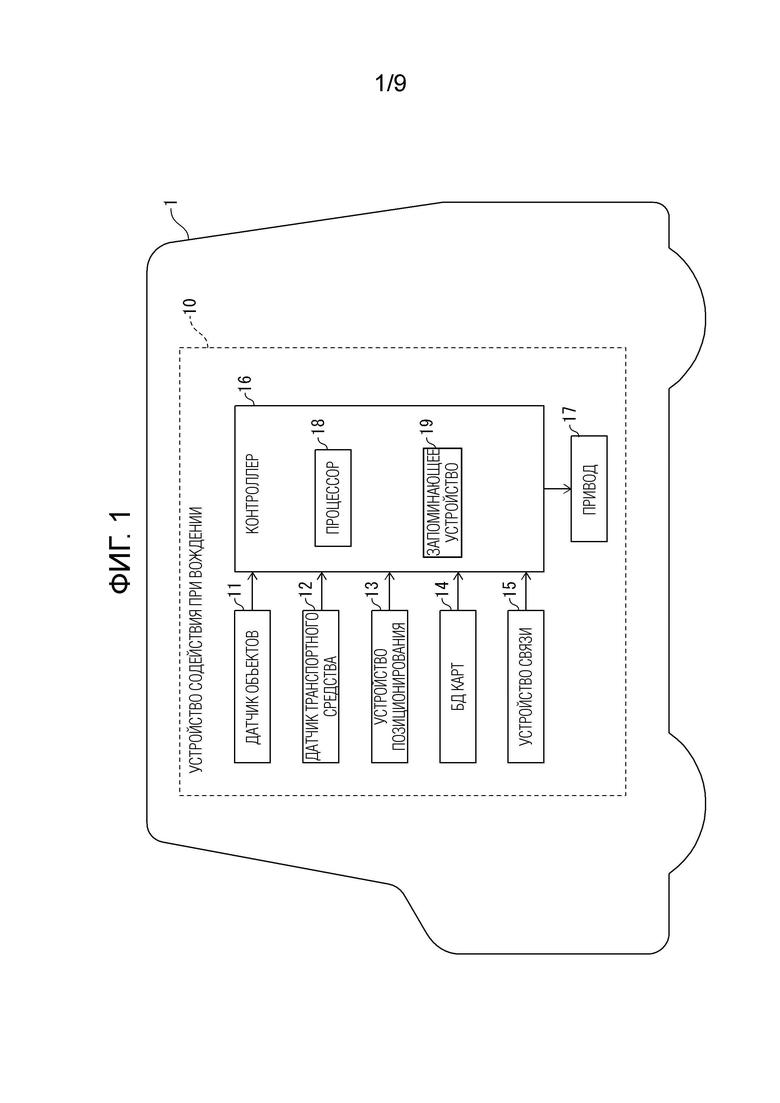
ФИГ. 1 представляет собой схематическое изображение конфигурации устройства содействия при вождении в соответствии с вариантами осуществления;
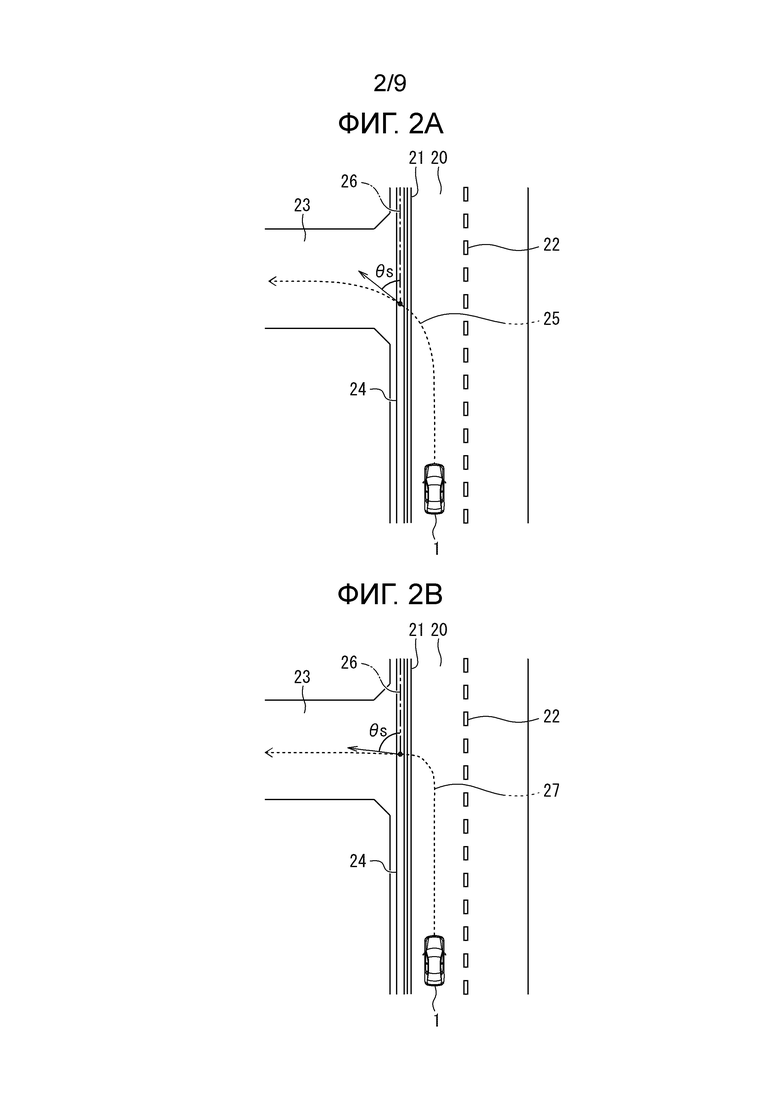
ФИГ. 2А представляет собой пояснительную схему примера способа содействия при вождении согласно вариантам осуществления;
ФИГ. 2B - еще одна пояснительная схема примера способа содействия при вождении согласно вариантам осуществления;
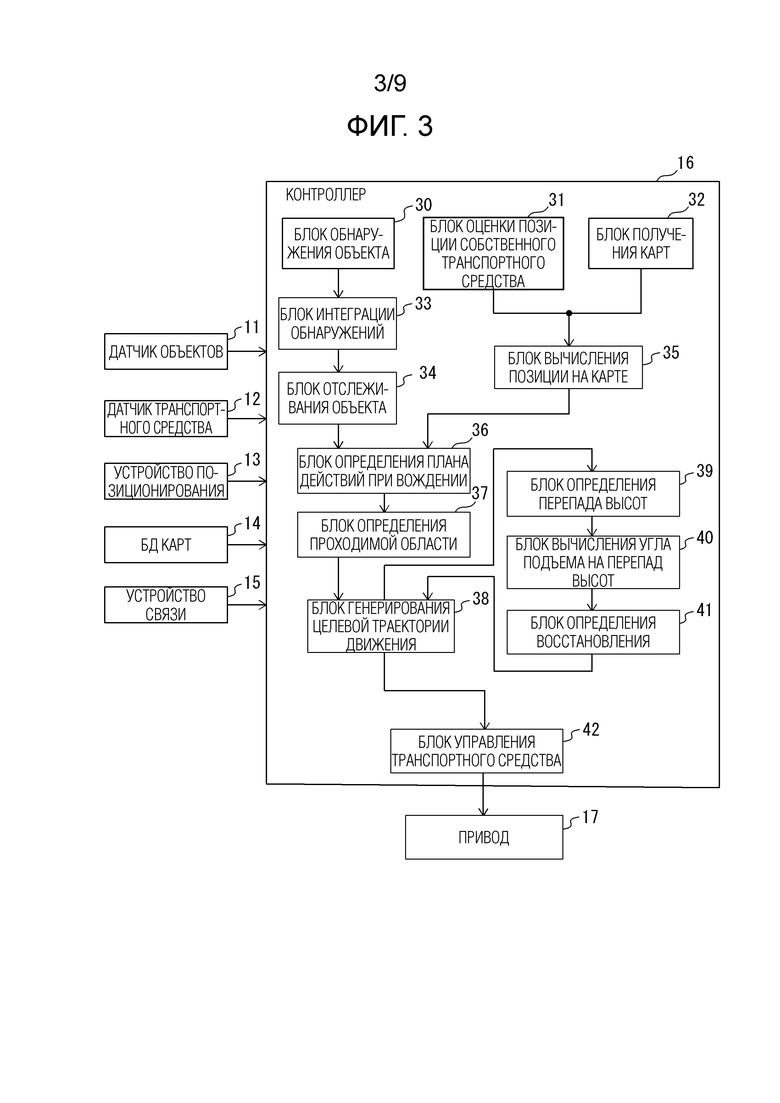
ФИГ. 3 представляет собой блок-схему, иллюстрирующую пример функциональной конфигурации устройства содействия при вождении согласно вариантам осуществления;
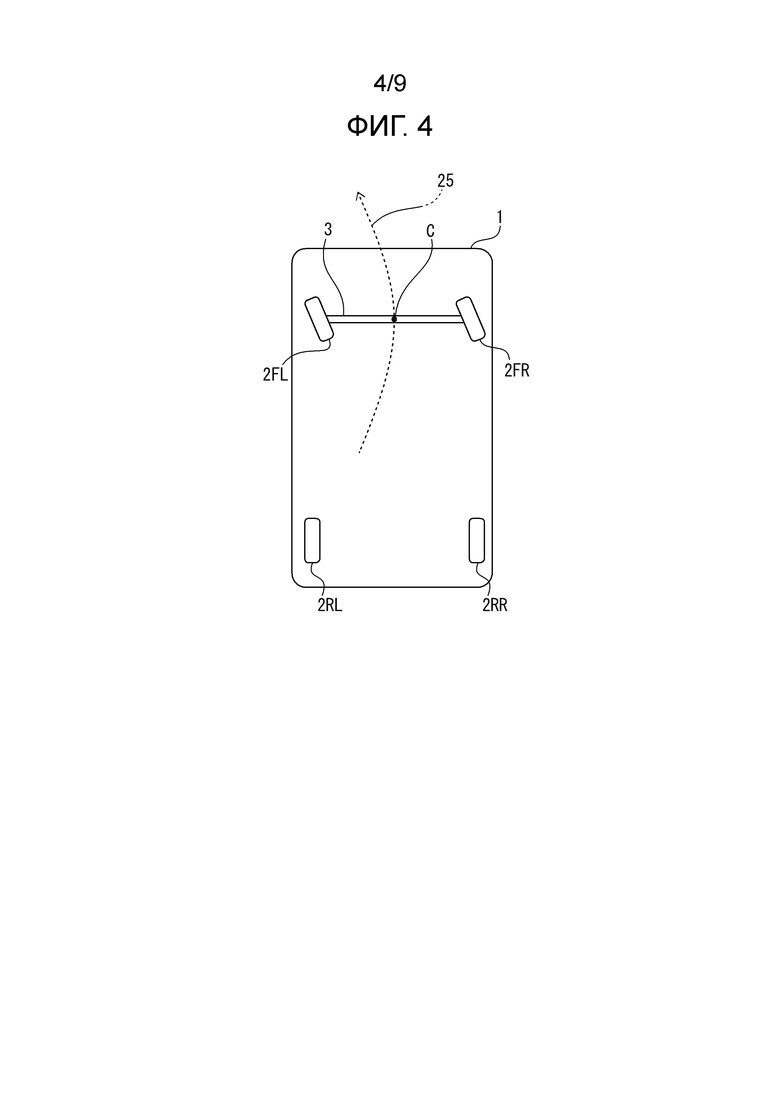
ФИГ. 4 - пояснительная диаграмма примера вычисления угла θs преодоления разности уровней;
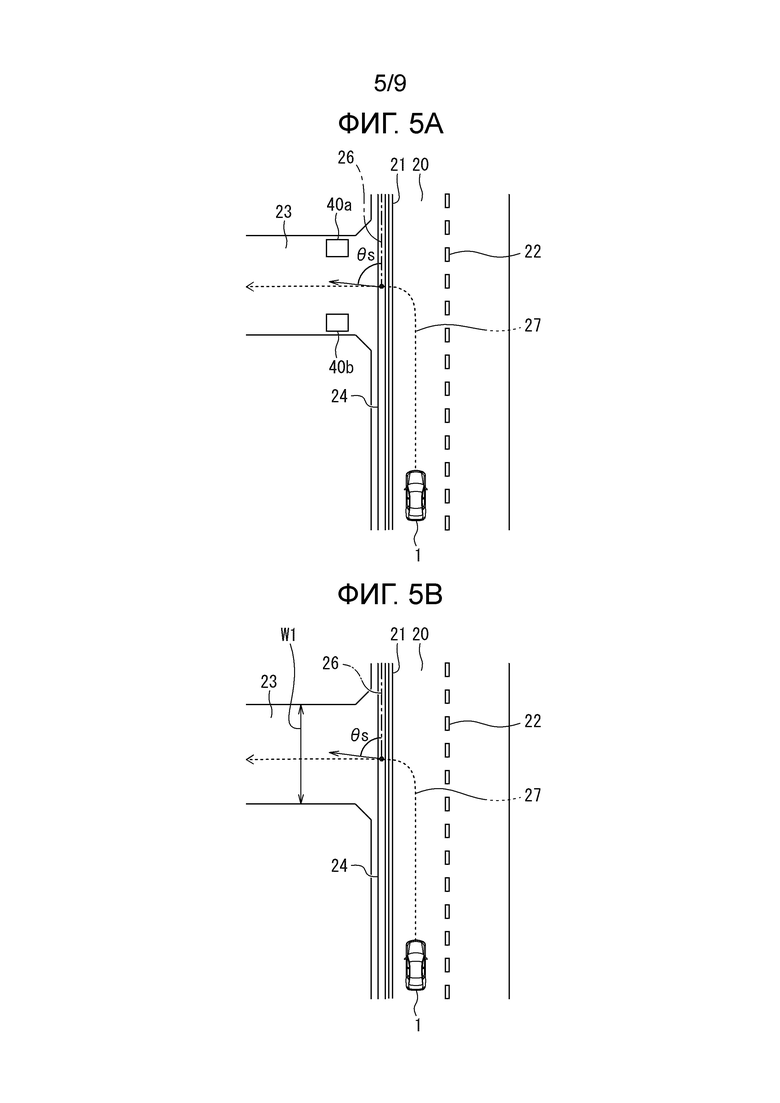
ФИГ. 5А - пояснительная диаграмма примера установки порогового значения Th угла θs преодоления разности уровней;
ФИГ. 5B - пояснительная диаграмма другого примера установки порогового значения Th угла θs преодоления разности уровней;
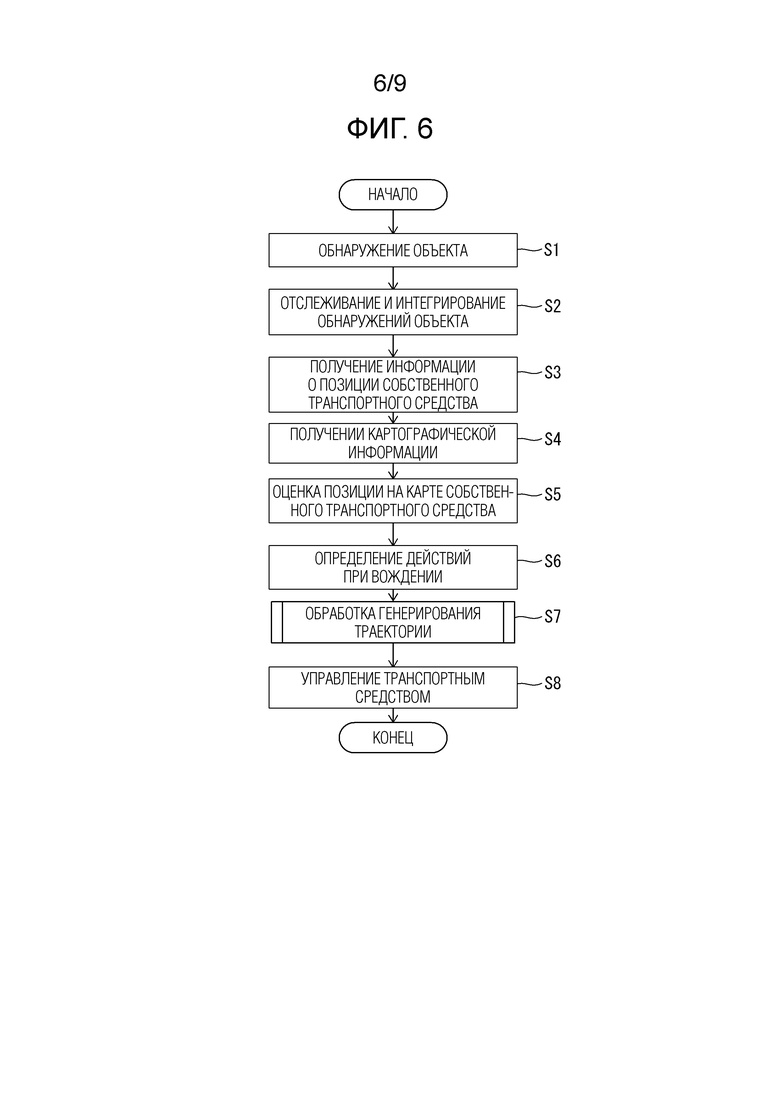
ФИГ. 6 представляет собой блок-схему примера способа содействия при вождении согласно вариантам осуществления;
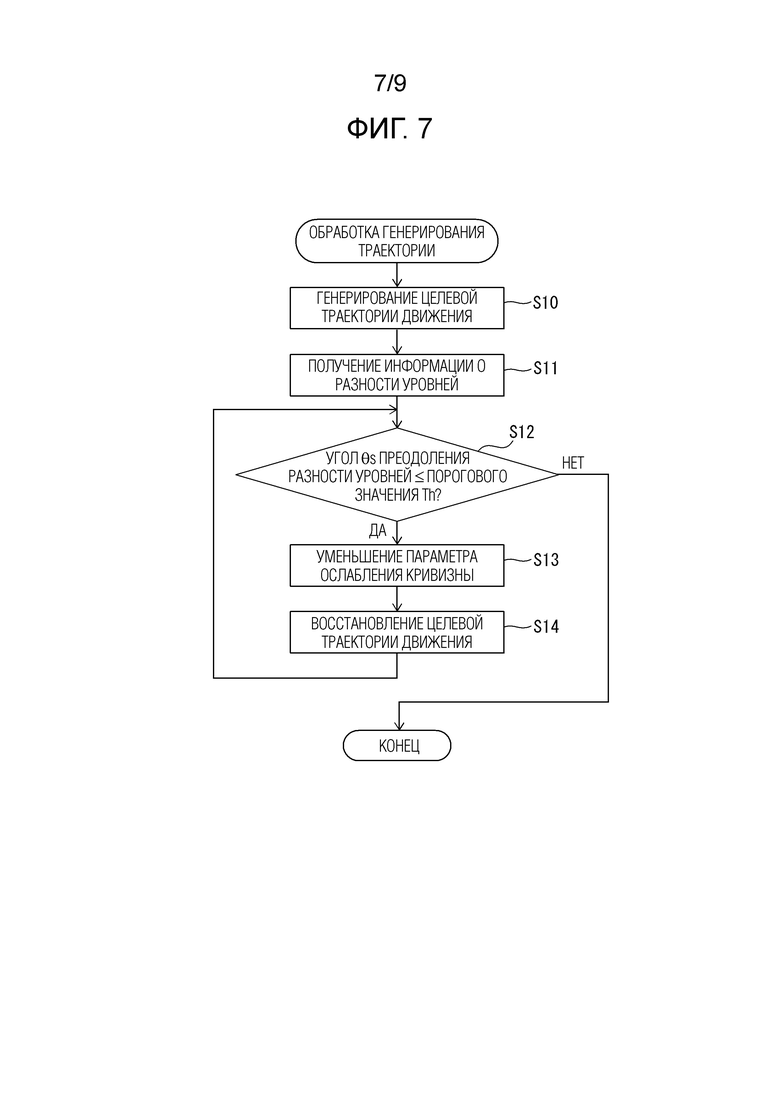
ФИГ. 7 представляет собой блок-схему примера обработки генерирования траектории по первому варианту осуществления;
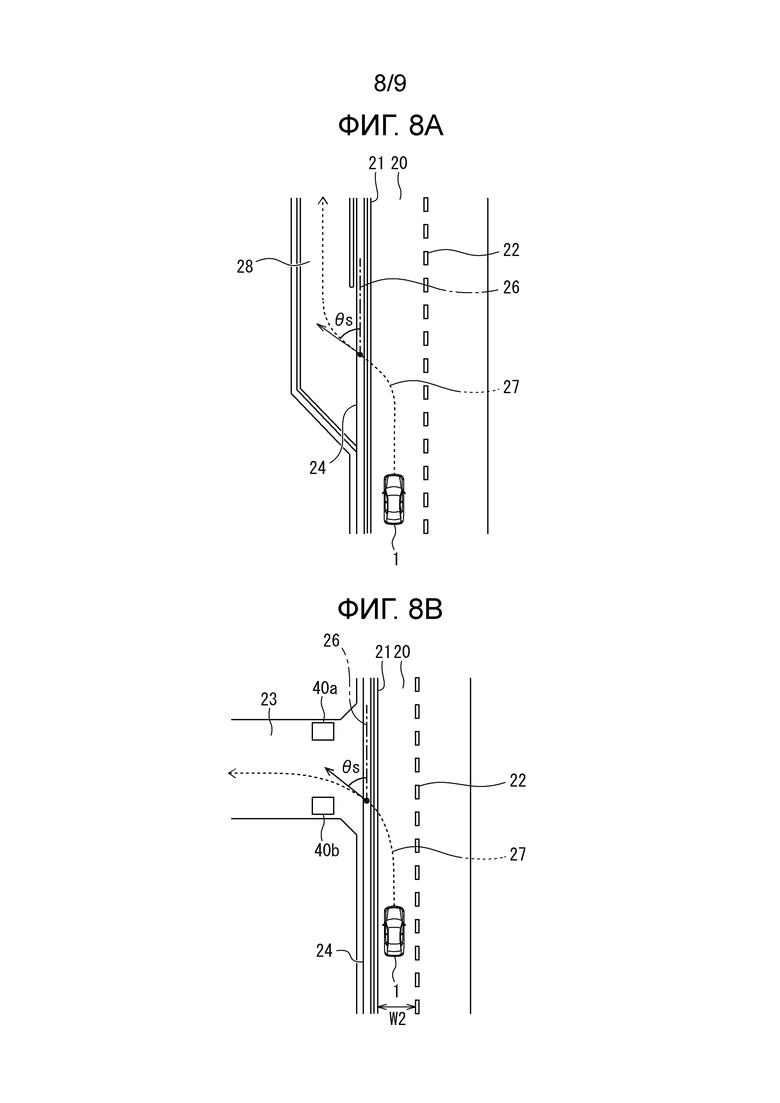
ФИГ. 8A представляет собой пояснительную диаграмму примера ситуации, в которой целевая скорость в момент времени, когда собственное транспортное средство проходит разность высот, установлена низкой;
ФИГ. 8B представляет собой пояснительную диаграмму другого примера ситуации, в которой целевая скорость в момент времени, когда собственное транспортное средство проходит разность уровней, установлена низкой; и
ФИГ. 9 представляет собой блок-схему примера обработки генерирования траектории второго варианта осуществления.
Описание вариантов осуществления
[0008]
(Первый вариант осуществления)
(Конфигурация)
Со ссылкой на ФИГ. 1. Собственное транспортное средство 1 включает в себя устройство 10 содействия при вождении, сконфигурированное для выполнения содействия при вождении собственного транспортного средства 1. Содействие при вождении, выполняемое устройством 10 содействия при вождении, может включать в себя беспилотное управление, которое, например, на основе среды движения вокруг собственного транспортного средства 1, вынуждает собственное транспортное средство 1 осуществлять беспилотное вождение без участия водителя.
Примером беспилотного управления с помощью устройства 10 содействия при вождении может быть управление вождением, которое вынуждает собственное транспортное средство 1 осуществлять беспилотное вождение по предустановленной целевой траектории движения в городской местности.
[0009]
Устройство 10 содействия при вождении включает в себя датчики 11 объектов, датчики 12 транспортных средств, устройство 13 позиционирования, базу данных 14 карт, устройство 15 связи, контроллер 16 и приводы 17. На чертежах база данных карт обозначена как «БД карт» (“map BD”).
Датчики 11 объектов включают в себя множество датчиков обнаружения объектов различных типов, которые установлены на собственном транспортном средстве 1 и обнаруживают объекты вокруг собственного транспортного средства 1, такие как лазерный радар, радар миллиметрового диапазона, камера и обнаружение и определение дальности с помощью света или обнаружение и определение дальности с помощью лазерной визуализации (ЛИДАР).
[0010]
Датчики 12 транспортного средства установлены на собственном транспортном средстве 1 и обнаруживают различную информацию (сигналы транспортного средства), которая может быть получена от собственного транспортного средства 1. Датчики 12 транспортного средства включают в себя датчик скорости транспортного средства для обнаружения скорости движения (скорости транспортного средства) собственного транспортного средства 1, датчики скорости колес для обнаружения скоростей вращения соответствующих шин собственного транспортного средства 1, трехосевой датчик ускорения (G датчик) для обнаружения ускорения (в том числе замедления) собственного транспортного средства 1 в трех осевых направлениях, датчик угла поворота рулевого колеса для обнаружения угла поворота рулевого колеса (в том числе угла поворота), гироскопический датчик для обнаружения угловой скорости, генерируемой собственным транспортным средством 1, датчик скорости рыскания для обнаружения скорости рыскания, датчик акселератора для обнаружения открытия акселератора собственного транспортного средства и датчик тормоза для обнаружения величины срабатывания тормоза водителем.
[0011]
Устройство 13 позиционирования включает в себя приемник глобальной навигационной спутниковой системы (GNSS) и, принимая радиоволны от множества навигационных спутников, измеряет текущую позицию собственного транспортного средства 1. Приемник GNSS может быть, например, приемником глобальной системы позиционирования (GPS) и т.п. Устройство 13 позиционирования может быть, например, инерциальным навигационным устройством.
База данных 14 карт может хранить данные карты высокой четкости (далее просто называемые «картой высокой четкости»), которая подходят в качестве карты для беспилотного вождения. Карта высокой четкости представляет собой картографические данные более высокой точности, чем картографические данные для навигации (в дальнейшем именуемые просто «навигационная карта»), и включает в себя информацию в единицах полос движения, которая является более подробной, чем информация в единицах дорог.
[0012]
Например, карта высокой четкости включает в себя в качестве информации в единицах полос движения информацию об узлах полосы движения, которые указывают опорные точки на опорной линии полосы движения (например, линию в центре полосы движения), и информацию о звеньях полос движения, которые указывают формы участков полосы движения между узлами полосы движения.
Информация о каждом узле полосы движения включает в себя идентификационный номер и координаты позиции узла полосы движения, количество соединенных звеньев (участков) полосы движения и идентификационные номера соединенных звеньев полосы движения. Информация о каждом звене полосы движения включает в себя идентификационный номер звена полосы движения, тип полосы движения, ширину полосы движения, типы граничных линий полосы движения, форму полосы движения, форму разметки полосы движения и форму опорной линии полосы движения. Карта высокого разрешения дополнительно включает в себя типы и координаты позиций наземных объектов, таких как светофор, стоп-линия, дорожный знак, здание, опора, бордюр и пешеходный переход, которые существуют на полосе движения или вблизи полосы движения, и информацию о наземных объектах, такую как идентификационные номера узлов полосы движения и идентификационные номера звеньев полосы движения, которые соответствуют координатам позиций наземных объектов.
[0013]
Поскольку карта высокой четкости включает в себя информацию об узлах и информацию о звеньях в единицах полос движения, можно указать полосу движения, по которой собственное транспортное средство 1 движется по маршруту движения. Карта высокого разрешения имеет систему координат, которая может представлять позиции в направлении прохождения и направлении ширины каждой полосы движения. Карта высокого разрешения имеет координаты (например, долготу, широту и высоту), которые могут представлять позиции в трехмерном пространстве, а полосы движения и вышеописанные наземные объекты могут быть описаны как формы в трехмерном пространстве.
Устройство 15 связи осуществляет беспроводную связь с устройством связи, внешним по отношению к собственному транспортному средству 1. Способом связи, используемым устройством 15 связи, может быть, например, беспроводная связь через сеть мобильной телефонной связи общего пользования, связь между транспортными средствами, связь между транспортными средствами или спутниковая связь.
[0014]
Контроллер 16 представляет собой электронный блок управления (ECU), который выполняет управление системой содействия при вождении собственного транспортного средства 1. Контроллер 16 включает в себя процессор 18 и периферийные компоненты, такие как запоминающее устройство 19. Процессор 18 может быть, например, центральным процессором (CPU) или микропроцессором (MPU).
Запоминающее устройство 19 может включать в себя полупроводниковое запоминающее устройство, магнитное запоминающее устройство, оптическое запоминающее устройство и т.п. Запоминающее устройство 19 может включать в себя регистры, кэш-память и память, используемую в качестве основного запоминающего устройства, такую как постоянная память (ROM) и оперативная память (RAM).
[0015]
Функции контроллера 16, которые будут описаны ниже, могут быть реализованы, например, процессором 18, выполняющим компьютерные программы, хранящиеся в запоминающем устройстве 19.
Следует отметить, что контроллер 16 может быть образован специализированным аппаратным обеспечением для выполнения обработки информации, которая будет описана ниже.
Например, контроллер 16 может включать в себя функциональную логическую схему, реализованную в полупроводниковой интегральной схеме общего назначения. Например, контроллер 16 может включать в себя программируемое логическое устройство, такое как программируемая пользователем вентильная матрица (FPGA) и т.п.
[0016]
Приводы 17 оперируют рулевым колесом, педалью акселератора и тормозным устройством собственного транспортного средства в соответствии с управляющими сигналами, выдаваемыми контроллером 16, и тем самым генерируют поведение собственного транспортного средства. Приводы 17 включают в себя привод рулевого управления, привод открытия акселератора и привод управления тормозом. Привод рулевого управления управляет направлением рулевого управления и величиной рулевого управления для рулевого управления собственного транспортного средства.
Привод открытия акселератора управляет открытием акселератора собственного автомобиля. Приводы управления тормозом управляют тормозным действием тормозных устройств собственного транспортного средства 1.
[0017]
Далее будет описан пример управления содействием при вождении, выполняемый контроллером 16. Фиг. 2А и 2В. Ссылочная позиция 20 указывает на полосу движения, по которой движется собственное транспортное средство 1, а ссылочные позиции 21 и 22 указывают демаркационные линии, указывающие границы полосы 20 движения. В примере в описании настоящего изобретения демаркационная линия 21 представляет собой полосу движения за пределами полосы 20 движения, а демаркационная линия 22 представляет собой граничную линию полосы движения. Демаркационные линии 21 и 22 являются примерами «границ пути движения», описанных в формуле изобретения. Граница пути движения не ограничивается демаркационной линией и может представлять собой наземный объект, например, бордюр и ограждение, или обочину дороги.
[0018]
Проезд 23 соединен с боковой стороной полосы 20 движения так, чтобы быть обращенным к полосе 20 движения, а между полосой 20 движения и проездом 23 параллельно полосе 20 движения проходит разность 24 уровней. Проезд 23 может быть, например, проездом для въезда в объект или в частную собственность. Проезд 23 не обязательно должен быть проездом четкой формы и может быть, например, частью прохода, существующего между въездом в объект или частную собственность и полосой 20 движения.
Теперь предполагается случай, когда контроллер 16, который выполняет беспилотное управление, генерирует целевую траекторию 25 движения, которая, как показано на фиг. 2А, отклоняется от полосы 20 движения и входит в проезд 23. Собственное транспортное средство 1, движущееся по целевой траектории 25 движения, преодолевает разность 24 уровней и въезжает в проезд 23.
[0019]
Угол θs, образованный направлением движения собственного транспортного средства 1 и направлением прохождения (протяженности) разности 24 уровней во время преодоления собственным транспортным средством 1 разности 24 уровней, определяется углом, образованным прямой линией, параллельной разности 24 уровней, и целевой траекторией 25 движения, то есть углом, образованным пересечением разности 24 уровней и целевой траекторией 25 движения. В дальнейшем угол θs, образованный пересечением разности 24 уровней и целевой траектории 25 движения, называется «углом преодоления разности уровней».
Когда угол θs преодоления разности уровней меньше 90 градусов, то есть, когда направление движения собственного транспортного средства 1 наклонено по отношению к направлению прохождения разности 24 уровней, помеха рулевого вала прикладывается к управляемым колесам собственного транспортного средства 1, которое преодолевает разность 24 уровней. В описании настоящего изобретения управляемые колеса означают колеса, управляемые рулевым механизмом.
[0020]
Помеха увеличивается по мере того, как угол θs преодоления разности уровней становится дальше от 90 градусов. Когда к управляемым колесам приложена большая помеха, существует вероятность того, что фактический угол руления отклонится от целевого угла руления, установленного в соответствии с целевой траекторией 25 движения, собственное транспортное средство 1 отклонится от целевой траектории 25 движения, и собственное транспортное средство 1, вероятно, приблизится к препятствию около собственного транспортного средства 1.
Соответственно, при генерировании целевой траектории движения, которая преодолевает разность 24 уровней, контроллер 16 генерирует целевую траекторию движения таким образом, что угол θs преодоления разности уровней превышает предварительно определенное пороговое значение Th.
[0021]
На фиг. 2B показан пример целевой траектории 27 движения, сгенерированной таким образом, что угол θs преодоления разности уровней больше предопределенного порогового значения Th. Генерирование целевой траектории 27 движения таким образом, что угол θs преодоления разности уровней больше предопределенного порогового значения Th, позволяет собственному транспортному средству 1 преодолевать разность 24 уровней под углом, близким к 90 градусам.
[0022]
Благодаря такой конфигурации можно уменьшить помеху рулевого вала, прикладываемую на управляемые колеса во время преодоления разности 24 уровней, и уменьшить отклонение от целевой траектории 27 движения. В результате можно предотвратить близкий подход к препятствию из-за отклонения от целевой траектории 27 движения.
Следует отметить, что, хотя в описании настоящего изобретения описывается случай, когда существует разность 24 уровней между полосой 20 движения и проездом 23, настоящее изобретение этим не ограничивается. Настоящее изобретение широко применимо к случаям, когда при беспилотном управлении генерируется целевая траектория движения, которая преодолевает разность 24 уровней.
[0023]
Далее будет подробно описана функциональная конфигурация контроллера 16 со ссылкой на фиг. 3. Контроллер 16 включает в себя блок 30 обнаружения объекта, блок 31 оценки позиции собственного транспортного средства, блок 32 получения карты, блок 33 интеграции обнаружения, блок 34 отслеживания объекта, блок 35 вычисления позиции на карте, блок 36 определения плана действий при вождении, блок 37 определения проходимой области, блок 38 генерирования целевой траектории движения, блок 39 определения разности уровней, блок 40 вычисления угла преодоления разности уровней, блок 41 определения восстановления и блок 42 управления транспортным средством.
[0024]
Блок 30 обнаружения объекта обнаруживает, на основе сигналов обнаружения от датчиков 11 объектов, позиции, угловые положения, размеры, скорости и т.п. объектов вокруг собственного транспортного средства 1, такого как транспортное средство, мотоцикл, пешеход и препятствие. Блок 30 обнаружения объекта выводит результаты обнаружения, представляющие двухмерные позиции, угловые положения, размеры, скорости и т.п. объектов, например, в виде в зените (также называемом видом в плане), в котором просматривается собственное транспортное средство 1 с воздуха.
[0025]
Блок 31 оценки позиции собственного транспортного средства измеряет, на основе результата измерения устройством 13 позиционирования и одометрии с использованием результатов обнаружения от датчиков 12 транспортного средства, абсолютную позицию собственного транспортного средства 1, то есть позицию собственного транспортного средства 1 относительно предопределенной опорной точки, углового положения и скорости собственного транспортного средства 1.
Блок 32 получения карты получает картографическую информацию, указывающую структуру дороги, по которой должно двигаться собственное транспортное средство 1, из базы данных 14 карт. Блок 32 получения карты может получать картографическую информацию с внешнего сервера картографических данных через устройство 15 связи.
[0026]
Блок 33 интеграции обнаружения интегрирует множество результатов обнаружения, которые блок 30 обнаружения объекта соответственно получил от множества датчиков обнаружения объектов, и выводит один результат обнаружения в отношении каждого из соответствующих объектов.
В частности, блок 33 интеграции обнаружения вычисляет из поведения объектов, соответственно полученных от датчиков обнаружения объектов, наиболее разумное поведение объектов, которое минимизирует ошибку, с учетом характеристик ошибок соответствующих датчиков обнаружения объектов.
В частности, используя известную технологию объединения датчиков, блок 33 интеграции обнаружения всесторонне оценивает результаты обнаружения, полученные множеством типов датчиков, и получает более точный результат обнаружения.
[0027]
Блок 34 отслеживания объектов отслеживает объекты, обнаруженные блоком 30 обнаружения объекта. В частности, на основе результатов обнаружения, интегрированных блоком 33 интеграции обнаружения, блок 34 отслеживания объектов выполняет проверку идентичности (ассоциации) объектов в разное время на основе поведения объектов, выводимых в разное время, и предсказывает на основе ассоциации поведение объектов, таких как скорость.
[0028]
Блок 35 вычисления позиции на карте оценивает позицию и угловое положение собственного транспортного средства 1 на карте на основе абсолютной позиции собственного транспортного средства 1, которая была получена блоком 31 оценки позиции собственного транспортного средства, и картографической информации, которая была получена блоком 32 получения карты.
Блок 36 определения плана действий при вождении определяет, на основе результатов обнаружения, полученных блоком 33 интеграции обнаружения и блоком 34 отслеживания объекта, и позиции собственного транспортного средства 1, идентифицированного блоком 35 вычисления позиции на карте, схематичное действие при вождении собственного транспортного средства 1, которое должно выполнять устройство 10 содействия при вождении.
[0029]
Примеры действия при вождении, которое определяет блок 36 определения плана действий при вождении, включают в себя, например, остановку собственного транспортного средства 1, временную остановку, скорость движения, замедление, ускорение, изменение курса, поворот направо, поворот налево, движение прямо, изменение полосы движения на участке слияния или между множеством полос движения, удержание полосы движения, обгон, реагирование на препятствие и т.п.
Блок 36 определения плана действий при вождении формирует на основе позиции и углового положения собственного транспортного средства 1, которые оценил блок 35 вычисления позиции на карте, позиции и угловые положения объектов вокруг собственного транспортного средства 1 и карты высокой четкости, карту пространства маршрута, которая представляет наличие или отсутствие маршрута и объекта вокруг собственного транспортного средства 1, и карту риска, на которой количественно определяется степень риска поля движения. Блок 36 определения плана действий при вождении генерирует на основе карты пространства маршрута и карты рисков план действий при вождении собственного транспортного средства 1.
[0030]
Блок 37 определения проходимой области определяет, на основе плана действий при вождении, определенного блоком 36 определения плана действий при вождении, характеристик передвижения собственного транспортного средства 1 и карты пространства маршрута, проходимую область, в которой собственное транспортное средство 1 может быть вынуждено двигаться.
Блок 38 генерирования целевой траектории движения генерирует, на основе действия вождения, определенного блоком 36 определения плана действий при вождении, и проходимой области, определенной блоком 37 определения проходимой области, кандидатов траектории движения, вдоль которой и профиль скорости в соответствии с которой вынуждено двигаться собственное транспортное средство 1.
Блок 38 генерирования целевой траектории движения оценивает будущие риски соответствующих кандидатов на основе карты рисков, выбирает оптимальную траекторию движения и профиль скорости и устанавливает выбранную траекторию движения и профиль скорости в качестве целевой траектории движения и целевой профиль скорости, в соответствии с которым собственное транспортное средство 1 вынуждено двигаться, соответственно.
[0031]
Со ссылкой на ФИГ. 2А. Когда целевая траектория движения, которая вынуждает собственное транспортное средство 1 поворачивать по мере того, как целевая траектория 25 движения генерируется, блок 38 генерирования целевой траектории движения постепенно увеличивает кривизну целевой траектории 25 движения до максимальной кривизны, а затем постепенно уменьшает кривизну целевой траектории 25 движения.
Например, блок 38 генерирования целевой траектории движения генерирует целевую траекторию 25 движения, сформированную в соответствии с клотоидной кривой или сплайновой кривой. Следует отметить, однако, что целевая траектория 25 движения не ограничивается кривой, которая вычисляется по известной формуле вычисления, как описано выше. Требуется, чтобы целевая траектория 25 движения была только кривой, кривизна которой постепенно увеличивается до максимальной кривизны, а затем постепенно уменьшается.
[0032]
Блок 38 генерирования целевой траектории движения может определять скорость изменения кривизны целевой траектории движения с конкретными параметрами. Параметры, с помощью которых определяется скорость изменения кривизны целевой траектории движения, в дальнейшем называются «параметрами ослабления (релаксации) кривизны». Примером параметров ослабления кривизны являются клотоидные параметры клотоидной кривой. По мере того, как параметры ослабления кривизны становятся больше, генерируется целевая траектория 25 движения, кривизна которой изменяется более плавно. По мере того, как параметры ослабления кривизны становятся меньше, генерируется целевая траектория 25 движения, кривизна которой изменяется более круто.
[0033]
Со ссылкой на ФИГ. 3. Блок 39 определения разности уровней получает информацию о разности уровней для разности 24 уровней, которая существует параллельно полосе 20 движения. Например, блок 39 определения разности уровней может получать информацию о разности уровней на основании результата распознавания изображения некоторого изображения, захваченного камерой. Кроме того, блок 39 определения разности уровней может получать информацию о разности уровней на основе результатов обнаружения лазерным радаром, радаром миллиметрового диапазона и лидаром.
Блок 39 определения разности уровней может получать, например, позицию, высоту и наклон (угол наклона верхней поверхности разности 24 уровней по отношению к дорожному покрытию полосы 20 движения или горизонтальной плоскости) разности 24 уровней в качестве информации о разности уровней.
[0034]
Кроме того, например, блок 39 определения разности уровней может путем обнаружения границы между дорогой общего пользования и частной собственностью, существующей на целевой траектории 25 движения, на основе картографической информации в базе данных 14 карт, получить информацию о разности уровней для разности 24 уровней, установленного в месте на границе между дорогой общего пользования и частной собственностью.
Кроме того, например, блок 39 определения разности уровней может получать на основе истории движения, сохраненной, когда собственное транспортное средство 1 или другое транспортное средство фактически двигалось, информацию о разности уровней для разности 24 уровней, существующей на целевой траектории 25 движения.
[0035]
Блок 40 вычисления угла преодоления разности уровней определяет, преодолевает ли целевая траектория 25 движения разность 24 уровней (пересекает ли целевая траектория 25 движения разность 24 уровней). Блок 40 вычисления угла преодоления разности уровней вычисляет угол θs преодоления разности уровней, когда целевая траектория 25 движения преодолевает разность 24 уровней. Со ссылкой на ФИГ. 4. Ссылочные обозначения 2FL и 2FR указывают управляемые колеса собственного транспортного средства 1, а ссылочные обозначения 2RL и 2RR обозначают колеса, отличные от управляемых колес. В примере в описании настоящего изобретения управляемые колеса 2FL и 2FR являются левым передним колесом и правым передним колесом соответственно, а колеса 2RL и 2RR являются левым задним колесом и правым задним колесом соответственно.
[0036]
Блок 40 вычисления угла преодоления разности уровней, используя траекторию, которая проходит центральную позицию С оси 3 управляемых колес 2FL и 2FR в качестве целевой траектории 25 движения, вычисляет угол θs преодоления разности уровней, образованный прямой линией, параллельной разности 24 уровней, и целевой траекторией 25 движения (угол преодоления разности уровней, образованный пересечением разности 24 уровней и целевой траекторией 25 движения).
Как описано выше, путем вычисления угла, образованного траекторией, которая проходит центральную позицию C оси 3 управляемых колес 2FL и 2FR, и прямой линией, параллельной разности 24 уровней, в качестве угла θs преодоления разности уровней, можно вычислить угол, образованный направлением управляемых колес 2FL и 2FR, и направлением, в котором разность 24 уровней проходит более подходящим образом.
[0037]
Со ссылкой на ФИГ. 3. Блок 41 определения восстановления определяет, следует ли восстанавливать целевую траекторию движения, в зависимости от угла θs преодоления разности уровней, вычисленного относительно целевой траектории 25 движения, которую сгенерировал блок 38 генерирования целевой траектории движения.
Когда угол θs преодоления разности уровней меньше или равен предварительно определенному пороговому значению Th, блок 41 определения восстановления принимает решение восстановить целевую траекторию движения. Когда угол θs преодоления разности уровней превышает предварительно определенное пороговое значение Th, блок 41 определения восстановления принимает решение не восстанавливать целевую траекторию движения. Блок 41 определения восстановления выводит результат определения в блок 38 генерирования целевой траектории движения.
[0038]
Кроме того, блок 41 определения восстановления может динамически изменять пороговое значение Th. Например, блок 41 определения восстановления может установить пороговое значение Th, которое изменяется в соответствии с информацией о разности уровней для разности 24 уровней. Например, блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, чем выше разность 24 уровней. Например, блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, поскольку наклон разности 24 уровней больше.
[0039]
Например, блок 41 определения восстановления может установить пороговое значение Th, которое изменяется в соответствии с соотношением сторон или внешним диаметром шин собственного транспортного средства 1. Например, блок 41 определения восстановления может установить более высокое значение в качестве порогового значения Th, поскольку соотношение сторон шин меньше. Например, блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, поскольку внешний диаметр шин меньше.
Кроме того, блок 41 определения восстановления может получать информацию о препятствиях вокруг собственного транспортного средства 1 от датчиков 11 объектов. Например, в ситуации, показанной на фиг. 5А, существуют стойки 40а и 40b, которые являются препятствиями.
[0040]
Когда препятствия 40а и 40b существуют вблизи целевой траектории 27 движения, по которой собственное транспортное средство 1 после преодоления разности 24 уровней должно двигаться, блок 41 определения восстановления может установить большее значение в качестве порогового значения Th.
Со ссылкой на ФИГ. 5B. Блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, поскольку ширина W1 полосы движения для полосы 23 движения, по которой собственное транспортное средство 1 после преодоления разности 24 уровней должно двигаться, является более узкой. Информация о ширине W1 полосы движения может быть получена, например, из базы данных 14 карты.
[0041]
Со ссылкой на ФИГ. 3. Когда блок 41 определения восстановления определяет восстанавливать целевую траекторию движения, блок 38 генерирования целевой траектории движения восстанавливает целевую траекторию движения.
При восстановлении целевой траектории движения блок 38 генерирования целевой траектории движения восстанавливает целевую траекторию движения таким образом, что угол θs преодоления разности уровней восстановленной целевой траектории движения увеличивается.
[0042]
Например, блок 38 генерирования целевой траектории движения путем уменьшения параметров ослабления кривизны целевой траектории движения, которая вынуждает собственное транспортное средство 1 поворачивать в сторону разности 24 уровней, восстанавливает целевую траекторию движения таким образом, что угол θs преодоления разности уровней увеличивается.
С другой стороны, когда блок 41 определения восстановления определяет не восстанавливать целевую траекторию движения, блок 38 генерирования целевой траектории движения выводит целевую траекторию движения и целевой профиль скорости в блок 42 управления транспортным средством.
[0043]
Поскольку посредством этого процесса блок 38 генерирования целевой траектории движения повторяет восстановление целевой траектории движения до тех пор, пока угол θs преодоления разности уровней не станет больше порогового значения Th, генерируется целевая траектория движения, угол θs преодоления разности уровней которой больше порогового значения Th.
Кроме того, блок 38 генерирования целевой траектории движения может установить целевой профиль скорости таким образом, чтобы целевая скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, была меньше или равна предварительно определенной низкой скорости (для например, 10 км/ч).
[0044]
Кроме того, блок 38 генерирования целевой траектории движения может динамически изменять целевую скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней.
Например, блок 38 генерирования целевой траектории движения может установить целевой профиль скорости таким образом, что целевая скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, изменяется в соответствии с информацией о разности уровней упомянутой разности 24 уровней.
Например, блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку разность 24 уровней выше. Например, блок 38 генерирования целевой траектории движения может также устанавливать более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку наклон разности 24 уровней больше.
[0045]
Например, блок 38 генерирования целевой траектории движения может установить целевой профиль скорости таким образом, что целевая скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, изменяется в соответствии с соотношением сторон шин собственного транспортного средства 1 или внешним диаметром шин. Например, блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку соотношение сторон ниже. Например, блок 38 генерирования целевой траектории движения может также устанавливать более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку внешний диаметр шин меньше.
[0046]
Кроме того, блок 38 генерирования целевой траектории движения может получать информацию о препятствиях вокруг собственного транспортного средства 1 от датчиков 11 объектов.
Со ссылкой на ФИГ. 5А. Блок 38 генерирования целевой траектории движения может установить целевой профиль скорости таким образом, что целевая скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, становится ниже, когда препятствия 40a и 40b существуют вблизи целевой траектории 27 движения, по которой должно двигаться собственное транспортное средство 1 после преодоления разности 24 уровней.
[0047]
Со ссылкой на ФИГ. 5B. Блок 38 генерирования целевой траектории движения может установить целевой профиль скорости таким образом, что целевая скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, становится меньше по мере того, как ширина W1 полосы 23 движения, вдоль которой должно двигаться собственное транспортное средство 1, преодолев разность 24 уровней, становится уже.
Кроме того, блок 38 генерирования целевой траектории движения может устанавливать целевой профиль скорости таким образом, что целевая скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, изменяется в соответствии с углом θs преодоления разности уровней.
[0048]
Например, блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку угол θs преодоления разности уровней меньше.
Со ссылкой на ФИГ. 3. Блок 42 управления транспортным средством приводит в действие приводы 17 таким образом, что собственное транспортное средство 1 движется по целевой траектории движения со скоростью в соответствии с целевым профилем скорости, выдаваемым блоком 38 генерирования целевой траектории движения.
[0049]
(Эксплуатация)
Далее пример эксплуатации устройства 10 содействия при вождении в варианте осуществления будет описан со ссылкой на фиг. 6.
На этапе S1 блок 30 обнаружения объекта, используя множество датчиков обнаружения объектов, определяет позиции, угловые положения, размеры, скорости и т.п. объектов вокруг собственного транспортного средства 1.
На этапе S2 блок 33 интеграции обнаружения интегрирует множество результатов обнаружения, полученных соответственно от множества датчиков обнаружения объектов, и выводит один результат обнаружения в отношении каждого из соответствующих объектов. Блок 34 отслеживания объектов отслеживает соответствующие объекты, которые были обнаружены и интегрированы, и предсказывает поведение объектов вокруг собственного транспортного средства 1.
[0050]
На этапе S3 блок 31 оценки позиции собственного транспортного средства измеряет на основе результата измерения устройством 13 позиционирования и одометрии с использованием результатов обнаружения от датчиков 12 транспортного средства позицию, угловое положение и скорость собственного транспортного средства 1 относительно предопределенной опорной точки.
На этапе S4 блок 32 получения карты получает картографическую информацию, указывающую структуру дороги, по которой должно двигаться собственное транспортное средство 1.
На этапе S5 блок 35 вычисления позиции на карте оценивает позицию и угловое положение собственного транспортного средства 1 на карте на основе позиции собственного транспортного средства 1, измеренной на этапе S3, и данных карты, полученных на этапе S4.
[0051]
На этапе S6 блок 36 определения плана действий при вождении определяет, на основе результатов обнаружения (поведения объектов вокруг собственного транспортного средства 1), полученных на этапе S2, и позиции собственного транспортного средства 1, идентифицированной на этапе S5, действие при вождении собственного транспортного средства 1, которое устройство 10 содействия при вождении должно выполнять.
На этапе S7 блок 37 определения проходимой области, блок 38 генерирования целевой траектории движения, блок 39 определения разности уровней, блок 40 вычисления угла преодоления разности уровней и блок 41 определения восстановления выполняют обработку генерации траектории для генерации целевой траектории движения собственного транспортного средства 1.
[0052]
Со ссылкой на фиг. 7 будет описана обработка генерации траектории по первому варианту осуществления. На этапе S10 блок 37 определения проходимой области определяет, в соответствии с планом действий при вождении, определенным блоком 36 определения плана действий при вождении и на основе характеристик движения собственного транспортного средства 1 и карты пространства маршрута, проходимую область, в которой собственное транспортное средство 1 может быть вынуждено двигаться. Блок 38 генерирования целевой траектории движения генерирует на основе действия вождения, определенного блоком 36 определения плана действий при вождении, и проходимой области, определенной блоком 37 определения проходимой области, целевую траекторию движения и целевой профиль скорости.
[0053]
На этапе S11 блок 39 определения разности уровней получает информацию о разности уровней для разности 24 уровней, которая существует параллельно с полосой 20 движения.
На этапе S12 блок 40 вычисления угла преодоления разности уровней определяет, преодолевает ли целевая траектория 25 движения разность 24 уровней ( пересекает ли целевая траектория 25 движения разность 24 уровней). Когда целевая траектория 25 движения преодолевает разность 24 уровней, блок 40 вычисления угла преодоления разности уровней вычисляет угол θs преодоления разности уровней.
[0054]
Блок 41 определения восстановления определяет, меньше или равен ли угол θs преодоления разности уровней предопределенному пороговому значению Th или нет. Когда угол θs преодоления разности уровней меньше или равен предопределенному пороговому значению Th (этап S12: Y), процесс переходит к этапу S13.
На этапе S13 блок 38 генерирования целевой траектории движения уменьшает параметры ослабления кривизны целевой траектории движения, что вынуждает собственное транспортное средство 1 поворачивать к разности 24 уровней.
[0055]
На этапе S14 блок 38 генерирования целевой траектории движения, используя параметры ослабления кривизны, установленные на этапе S13, восстанавливает целевую траекторию движения, которая преодолевает разность 24 уровней. Затем процесс возвращается к этапу S12.
Напротив, когда на этапе S12 угол θs преодоления разности уровней не меньше или равен предопределенному пороговому значению Th (этап S12: N), блок 38 генерирования целевой траектории движения выводит целевую траекторию движения и целевой профиль скорости в блок 42 управления транспортным средством, который завершает обработку генерирования траектории, и процесс переходит к этапу S8 на фиг. 6.
Со ссылкой на ФИГ. 6. На этапе S8 блок 42 управления транспортным средством управляет собственным транспортным средством 1 таким образом, что собственное транспортное средство 1 движется в соответствии с целевой траекторией движения и профилем скорости, сгенерированным на этапе S7.
[0056]
(Вариация)
Хотя в описанном выше примере было определено, был ли угол θs преодоления разности уровней целевой траектории движения, сгенерированной блоком 38 генерирования целевой траектории движения, меньше или равен предопределенному пороговому значению Th, и, когда угол θs преодоления разности уровней был меньше или равен предопределенному пороговому значению Th, восстанавливалась целевая траектория движения, настоящее изобретение этим не ограничивается. При формировании целевой траектории движения, которая преодолевает разность 24 уровней, блок 38 генерирования целевой траектории движения может генерировать целевую траекторию движения путем соответствующей установки параметров ослабления кривизны таким образом, чтобы угол θs преодоления разности уровней был больше чем предопределенное пороговое значение Th. В этом случае блок 40 вычисления угла преодоления разности уровней и блок 41 определения восстановления, показанные на фиг. 3, могут быть опущены.
[0057]
Например, блок 38 генерирования целевой траектории движения может определять на основе плана действий при вождении, сгенерированного блоком 36 определения плана действий при вождении, и информации о разности уровней, полученной блоком 39 определения разности уровней, следует ли генерировать целевую траекторию движения, которая преодолевает разность 24 уровней.
При генерировании целевой траектории движения, которая преодолевает разность 24 уровней, блок 38 генерирования целевой траектории движения может генерировать целевую траекторию движения, угол θs преодоления разности уровней которой больше предопределенного порогового значения Th, путем соответствующей установки меньших параметров ослабления кривизны, чем в случае генерирования целевой траектории движения, которая не преодолевает разность 24 уровней.
[0058]
(Благоприятные эффекты первого варианта осуществления)
(1) Контроллер 16 управляет собственным транспортным средством 1 с помощью контроллера таким образом, что собственное транспортное средство 1 движется по целевой траектории движения. Блок 39 определения разности уровней получает информацию о разности уровней для разности 24 уровней, которая существует параллельно полосе 20 движения, по которой движется собственное транспортное средство 1. При генерировании целевой траектории движения, которая преодолевает разность 24 уровней, блок 38 генерирования целевой траектории движения генерирует целевую траекторию движения таким образом, что угол θs преодоления разности уровней превышает предопределенное пороговое значение Th.
Из-за этой конфигурации угол, под которым управляемые колеса собственного транспортного средства 1 преодолевают разность 24 уровней, становится небольшим, и помеха становится небольшой, что позволяет уменьшить ошибку отслеживания относительно целевой траектории движения. Благодаря этому эффекту можно снизить вероятность столкновения с внедорожным препятствием.
[0059]
(2) Блок 38 генерирования целевой траектории движения генерирует целевую траекторию движения в зависимости от результата обнаружения объекта вокруг собственного транспортного средства 1. Когда угол θs преодоления разности уровней, образованный сгенерированной целевой траекторией движения и прямой линией, параллельной разности 24 уровней, меньше или равен пороговому значению Th, блок 38 генерирования целевой траектории движения восстанавливает целевую траекторию движения таким образом, чтобы угол θs преодоления разности уровней был больше порогового значения Th.
Из-за этой конфигурации угол, под которым управляемые колеса собственного транспортного средства 1 преодолевают разность 24 уровней, становится небольшим, и помеха становится небольшой, что позволяет уменьшить ошибку отслеживания относительно целевой траектории движения. Благодаря этому эффекту можно снизить вероятность столкновения с внедорожным препятствием.
[0060]
(3) Блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, чем выше рахность 24 уровней или больше наклон разности 24 уровней.
Поскольку чем выше разность уровней или больше угол наклона, тем больше становится сила сопротивления, подводимая к шинам от разности 24 уровней, и тем больше становится ошибка отслеживания относительно целевой траектории движения, установление порогового значения Th большим позволяет подавить ошибку.
[0061]
(4) Блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, поскольку соотношение размеров шин собственного транспортного средства 1 ниже или внешний диаметр шин меньше.
Поскольку вероятность воздействия помех на управляемые колеса определяется таким образом, что чем ниже соотношение сторон шин и меньше внешний диаметр шин, тем больше становится ошибка отслеживания относительно целевой траектории движения, установка порогового значения Th большим позволяет подавить ошибку.
[0062]
(5) Блок 41 определения восстановления может получать информацию о препятствиях вокруг собственного транспортного средства 1 и, когда препятствие существует вблизи целевой траектории движения, по которой собственное транспортное средство 1 должно двигаться после преодоления разности 24 уровней, устанавливать большее значение в качестве порогового значения Th.
Когда имеется препятствие в позиции, близкой к целевой траектории движения, после преодоления разности 24 уровней, установка большего порогового значения Th позволяет подавить ошибку и избежать столкновения.
[0063]
(6) Блок 41 определения восстановления может установить большее значение в качестве порогового значения Th, поскольку ширина полосы движения для полосы движения, по которой собственное транспортное средство 1, после преодоления разности 24 уровней, должно двигаться, является более узкой.
Когда ширина пути движения после преодоления разности 24 уровней является узкой, установление порогового значения Th более большим позволяет подавить ошибку и предотвратить отклонение собственного транспортного средства 1 от пути движения наружу и столкновение с препятствием.
[0064]
(7) Блок 38 генерирования целевой траектории движения может установить целевую скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, на низкую скорость.
Снижение скорости транспортного средства позволяет быстро выполнять коррекцию траектории после преодоления разности 24 уровней, предотвращать повторение большой ошибки и улучшать характеристики отслеживания целевой траектории движения.
[0065]
(8) Блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку разность 24 уровней больше или наклон разности 24 уровней больше.
Поскольку чем больше разность 24 уровней или чем больше ее наклон, тем больше становится величина отклонения после преодоления разности 24 уровней, снижение скорости транспортного средства позволяет быстро выполнить коррекцию траектории после преодоления разности 24 уровней, необходимо предотвратить повторение большой ошибки и улучшить отслеживание целевой траектории движения.
[0066]
(9) Блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку соотношение сторон шин собственного транспортного средства 1 меньше или внешний диаметр шины меньше.
Поскольку чем меньше соотношение сторон шин или меньше наружный диаметр шин, тем больше становится величина отклонения после преодоления разности 24 уровней, снижение скорости транспортного средства позволяет быстро выполнить корректировку траектории после преодоления разности 24 уровней, предотвратить повторение большой ошибки, и улучшить последующие действия по целевой траектории движения.
[0067]
(10) Блок 38 генерирования целевой траектории движения может получать информацию о препятствиях вокруг собственного транспортного средства 1, и, когда препятствие существует вблизи целевой траектории движения, по которой собственное транспортное средство 1, после преодоления разности 24 уровней, должно двигаться, установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней.
Поскольку при наличии препятствия после преодоления разности 24 уровней риск столкновения возрастает, снижение скорости транспортного средства позволяет быстро выполнить коррекцию траектории после преодоления разности 24 уровней, предотвратить повторение большой ошибки и избежать столкновения.
[0068]
(11) Блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, когда ширина полосы движения для полосы движения, по которой должно двигаться собственное транспортное средство 1 после преодоления разности 24 уровней, становится уже.
Поскольку чем уже ширина полосы движения, тем выше риск выезда с дороги после преодоления разности 24 уровней, снижение скорости транспортного средства позволяет оперативно выполнять коррекцию траектории после преодоления разности 24 уровней, предотвращая повторение большой ошибки и избегая столкновения.
[0069]
(12) Блок 38 генерирования целевой траектории движения может установить более низкую целевую скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, поскольку угол θs преодоления разности уровней меньше.
Даже когда угол θs преодоления разности уровней невелик, снижение скорости транспортного средства позволяет быстро выполнить коррекцию маршрута, предотвратить повторение большой ошибки и избежать столкновения.
[0070]
(13) Блок 40 вычисления угла преодоления разности уровней может вычислять, используя траекторию, по которой центральная позиция оси управляемых колес собственного транспортного средства 1 проходит в качестве целевой траектории движения, угол θs преодоления разности уровней, образованный прямой линией, параллельной разности 24 уровней, и целевой траекторией движения.
Учет траектории центральной позиции оси управляемых колес вместо центра кузова транспортного средства позволяет повысить точность угла наклона шин в момент преодоления управляемыми колесами разности 24 уровней.
[0071]
(Второй вариант осуществления)
Далее будет описан второй вариант осуществления. Насколько близко угол θs преодоления разности уровней может быть доведен до 90 градусов, зависит от дорожной ситуации, окружающей среды и т.п. собственного транспортного средства 1. То есть допустимый диапазон параметров ослабления кривизны, в пределах которого параметры ослабления кривизны могут быть скорректированы, чтобы приблизить угол θs преодоления разности уровней к 90 градусам, зависит от условий движения, окружающей среды и т.п. собственного транспортного средства 1. Таким образом, существует случай, когда целевая траектория движения не может быть сгенерирована таким образом, чтобы угол θs преодоления разности уровней превышал предопределенное пороговое значение Th.
[0072]
Со ссылкой на ФИГ. 8А. Предполагается случай, когда генерируется целевая траектория 27 движения, которая от полосы 20 движения, преодолевает разность 24 уровней и производит смену полосы движения на полосу 28 движения развилки. В этом случае необходимо после перестроения на полосу 28 движения развилки вырулить колеса в противоположную сторону, а при приближении угла θs преодоления разности уровней к 90 градусам, параметр ослабления кривизны превышает его допустимый диапазон, и собственное транспортное средство 1, преодолев разность 24 уровней, становится неспособным двигаться в пределах границ пути движения полосы 28 движения развилки. Таким образом, угол θs преодоления разности уровней нельзя приблизить к 90 градусам.
[0073]
Со ссылкой на ФИГ. 8B. В случае, когда ширина W2 полосы движения для полосы 20 движения, по которой движется собственное транспортное средство 1 до преодоления разности 24 уровней, является узкой, когда угол θs преодоления разности уровней приближается к 90 градусам, параметр ослабления кривизны также превышает его допустимый диапазон, и собственное транспортное средство 1 становится неспособным двигаться в пределах границ пути движения полосы 20 движения до преодоления разности 24 уровней. В этом случае угол θs преодоления разности уровней также нельзя приблизить к 90 градусам.
[0074]
Соответственно, блок 38 генерирования целевой траектории движения по второму варианту осуществления определяет, может ли целевая траектория движения быть сгенерирована таким образом, чтобы собственное транспортное средство 1 двигалось в пределах границ пути движения, а угол θs преодоления разности уровней был больше чем пороговое значение Th.
Когда никакая целевая траектория движения не может быть сгенерирована таким образом, что собственное транспортное средство 1 движется в пределах границ пути движения, а угол θs преодоления разности уровней больше порогового значения Th, блок 38 генерирования целевой траектории движения устанавливает целевую скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, на предопределенную низкую скорость.
Благодаря этой конфигурации, даже если целевая траектория движения не может быть сгенерирована таким образом, что угол θs преодоления разности уровней больше предопределенного порогового значения Th, можно подавить величину отклонения от целевой траектории движения после преодоления разности 24 уровней и оперативно провести коррекцию после преодоления разности 24 уровней.
[0075]
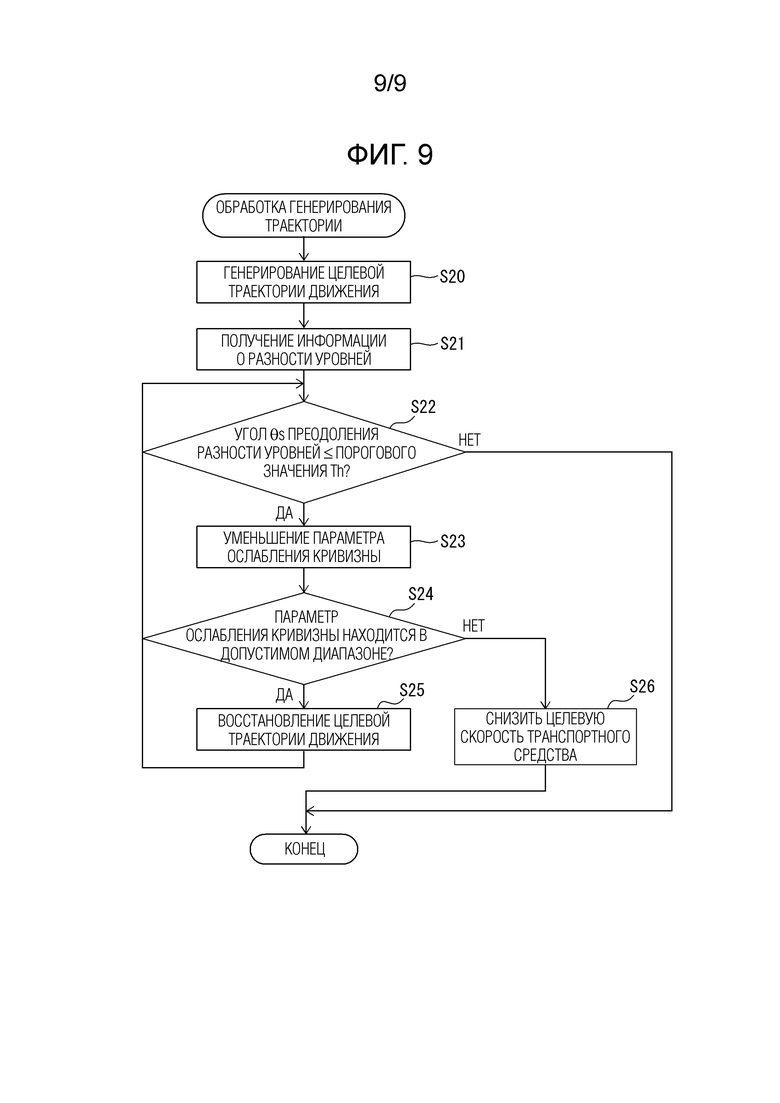
Со ссылкой на фиг. 9 будет описана обработка генерирования траектории второго варианта осуществления. Обработка на этапах S20-S23 аналогична обработке на этапах S10-S13, описанной со ссылкой на фиг. 7.
На этапе S24 блок 38 генерирования целевой траектории движения определяет, находятся ли параметры ослабления кривизны, уменьшенные на этапе S23, в пределах предопределенного допустимого диапазона. Например, блок 38 генерирования целевой траектории движения определяет, может ли генерироваться целевая траектория движения, по которой собственное транспортное средство 1 движется в пределах границ пути движения, с использованием параметров ослабления кривизны, уменьшенных на этапе S23.
Когда параметры ослабления кривизны не находятся в предопределенном допустимом диапазоне (этап S24: N) процесс переходит к этапу S26.
[0076]
На этапе S26 блок 38 генерирования целевой траектории движения устанавливает целевой профиль скорости таким образом, что целевая скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, становится ниже. Например, блок 38 генерирования целевой траектории движения устанавливает целевой профиль скорости таким образом, что целевая скорость в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, является низкой скоростью. После этого обработка генерирования траектории завершается, и процесс переходит к этапу S8 на фиг. 6.
Когда параметры ослабления кривизны находятся в предопределенном допустимом диапазоне (этап S24: Y), процесс переходит к этапу S25. Обработка на этапе S25 аналогична обработке на этапе S14, описанной со ссылкой на фиг. 7. Затем процесс возвращается к этапу S22.
[0077]
(Благоприятные эффекты второго варианта осуществления)
Блок 30 обнаружения объекта обнаруживает границы пути движения полосы 20 движения, по которой движется собственное транспортное средство 1. Когда никакая целевая траектория движения не может быть сгенерирована таким образом, что собственное транспортное средство 1 движется в пределах границ пути движения, а угол θs преодоления разности уровней больше порогового значения Th, блок 38 генерирования целевой траектории движения устанавливает целевую скорость транспортного средства в момент времени, когда собственное транспортное средство 1 проходит разность 24 уровней, на низкую скорость.
Благодаря этой конфигурации, даже если целевая траектория движения не может быть сгенерирована таким образом, что угол θs преодоления разности уровней больше предопределенного порогового значения Th, можно подавить величину отклонения от целевой траектории движения после преодоления разности 24 уровней и оперативно провести коррекцию после преодоления разности 24 уровней.
[0078]
Все примеры и условные формулировки, представленные в данном документе, предназначены для обучающих целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или несколько вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0079]
1 собственное транспортное средство
2FL, 2FR управляемое колесо
2RL, 2RR Колесо
3 ось
10 устройство содействия при вождении
11 датчик объекта
12 датчик транспортного средства
13 устройство позиционирования
14 база данных карт
15 устройство связи
16 контроллер
17 привод
18 процессор
19 запоминающее устройство
30 блок обнаружения объекта
31 блок оценки позиции собственного транспортного средства
32 блок получения карты
33 блок интеграции обнаружения
34 блок отслеживания объекта
35 блок вычисления позиции на карте
36 блок определения плана действий при вождении
37 блок определения проходимой области
38 блок генерирования целевой траектории движения
39 блок определения разности уровней
40 блок вычисления угла преодоления разности уровней
41 блок определения восстановления
42 блок управления транспортным средством
Изобретение относится к способу содействия при вождении и устройству содействия при вождении. Способ содействия при вождении для управления собственным транспортным средством с помощью контроллера включает в себя получение информации о разности уровней для разности высот существующего вдоль полосы движения, по которой движется собственное транспортное средство. Когда из информации о разности уровней определяют, что собственное транспортное средство должно преодолеть разность уровней, генерирование целевой траектории движения происходит таким образом, чтобы угол (θs) преодоления разности уровней, который представляет собой угол, образованный разностью уровней и целевой траекторией движения, больше порогового значения (Th). Причем большее значение устанавливается в качестве порогового значения, когда разность уровней выше или наклон разности уровней больше. Обеспечивается уменьшение отклонения от целевой траектории движения, когда транспортное средство преодолевает разность уровней. 2 н. и 11 з.п. ф-лы, 12 ил.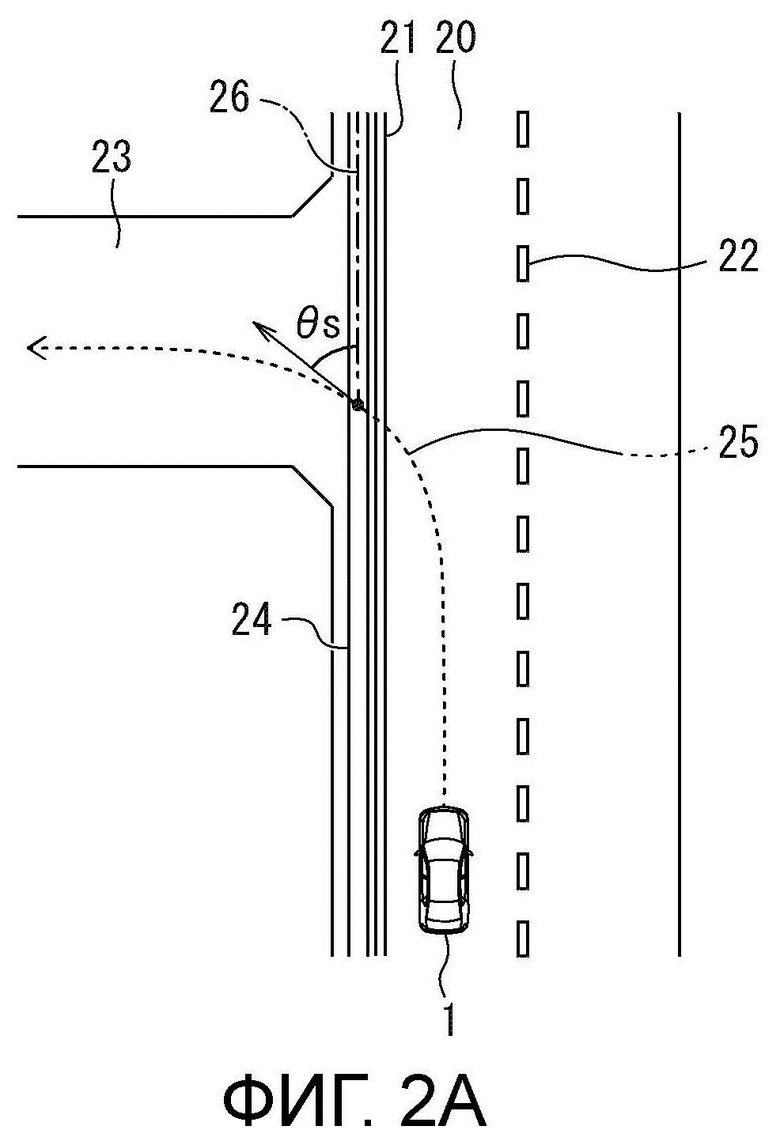
1. Способ содействия при вождении для управления собственным транспортным средством посредством контроллера таким образом, что собственное транспортное средство движется по целевой траектории движения, причем способ содержит:
получение информации о разности уровней некоторой разности уровней, существующей вдоль полосы движения, по которой движется собственное транспортное средство; и
при определении, на основе информации о разности уровней, что собственное транспортное средство должно преодолевать разность уровней, генерирование целевой траектории движения таким образом, что угол преодоления разности уровней, который представляет собой угол, образованный разностью уровней и целевой траекторией движения, больше порогового значения, причем
большее значение устанавливается в качестве порогового значения, когда разность уровней выше или наклон разности уровней больше.
2. Способ содействия при вождении по п. 1, причем
способ генерирует целевую траекторию движения в зависимости от результата обнаружения объекта вокруг собственного транспортного средства, и
в случае получения информации о разности уровней некоторой разности уровней, существующей вдоль полосы движения, по которой движется собственное транспортное средство, и определения на основе информации о разности уровней того, что собственное транспортное средство должно преодолевать разность уровней, когда угол преодоления разности уровней, образованный сгенерированной целевой траекторией движения и разностью уровней, меньше или равен упомянутому пороговому значению, способ восстанавливает или корректирует целевую траекторию движения таким образом, чтобы угол преодоления разности уровней был больше, чем упомянутое пороговое значение.
3. Способ содействия при вождении по п. 1 или 2, отличающийся тем, что способ устанавливает большее значение в качестве порогового значения, когда соотношение сторон шин собственного транспортного средства меньше или внешний диаметр шин меньше.
4. Способ содействия при вождении по любому из пп. 1-3, дополнительно содержащий
получение информации о препятствии вокруг собственного транспортного средства,
при этом при наличии препятствия вблизи целевой траектории движения, по которой собственное транспортное средство после преодоления разности уровней должно двигаться, способ устанавливает большее значение в качестве упомянутого порогового значения.
5. Способ содействия при вождении по любому из пп. 1-4, отличающийся тем, что способ устанавливает целевую скорость транспортного средства, в момент времени, когда собственное транспортное средство проходит разность уровней, на низкую скорость.
6. Способ содействия при вождении по любому из пп. 1-5, отличающийся тем, что способ устанавливает более низкую целевую скорость в момент времени, когда собственное транспортное средство проходит разность уровней, когда разность уровней является более большой или наклон разности уровней является более большим.
7. Способ содействия при вождении по любому из пп. 1-6, отличающийся тем, что способ устанавливает более низкую целевую скорость в момент времени, когда собственное транспортное средство проходит разность уровней, когда соотношение сторон шин собственного транспортного средства является меньшим или внешний диаметр шин является меньшим.
8. Способ содействия при вождении по любому из пп. 1-7, дополнительно содержащий
получение информации о препятствии вокруг собственного транспортного средства,
при этом при наличии препятствия вблизи целевой траектории движения, по которой собственное транспортное средство после преодоления разности уровней должно двигаться, способ устанавливает более низкую целевую скорость в момент времени, когда собственное транспортное средство проходит разность уровней.
9. Способ содействия при вождении по любому из пп. 1-8, отличающийся тем, что способ устанавливает более низкую целевую скорость в момент времени, когда собственное транспортное средство проходит разность уровней, когда ширина полосы движения для полосы движения, по которой собственное транспортное средство после преодоления разности уровней должно двигаться, является более узкой.
10. Способ содействия при вождении по любому из пп. 1-9, дополнительно содержащий
обнаружение границ пути движения полосы движения, по которой движется собственное транспортное средство,
при этом, когда целевая траектория движения не может быть сгенерирована таким образом, чтобы собственное транспортное средство двигалось в пределах границ пути движения, а угол преодоления разности уровней больше порогового значения, способ устанавливает целевую скорость транспортного средства в момент времени, когда собственное транспортное средство проходит разность уровней, на низкую скорость.
11. Способ содействия при вождении по любому из пп. 1-10, причем способ устанавливает более низкую целевую скорость транспортного средства в момент времени, когда собственное транспортное средство проходит разность уровней, когда угол преодоления разности уровней меньше.
12. Способ содействия при вождении по любому из пп. 1-11, причем способ с использованием траектории, по которой центральная позиция оси управляемых колес собственного транспортного средства проходит в качестве целевой траектории движения, вычисляет угол преодоления разности уровней, образованный разностью уровней и целевой траекторией движения.
13. Устройство содействия при вождении, выполненное с возможностью управления собственным транспортным средством таким образом, что собственное транспортное средство движется по целевой траектории движения, содержащее:
датчик, сконфигурированный для обнаружения объекта вокруг собственного транспортного средства; и
контроллер, сконфигурированный для получения информации о разности уровней некоторой разности уровней, существующей вдоль полосы движения, по которой движется собственное транспортное средство, и когда на основе информации о разности уровней определяется, что собственное транспортное средство должно преодолеть разность уровней, генерирования целевой траектории движения таким образом, что угол преодоления разности уровней, который представляет собой угол, образованный разностью уровней и целевой траекторией движения, превышает пороговое значение, причем
большее значение устанавливается в качестве порогового значения, когда разность уровней выше или наклон разности уровней больше.
| JP 2014101101 A, 05.06.2014 | |||
| US 9604638 B2, 28.03.2018 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2014 |
|
RU2657656C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
