Область техники
Настоящее изобретение относится к системе для измерения массы топлива, находящегося в емкости с изменяющейся геометрией, в частности, к системе и способу измерения массы топлива, содержащегося в переносной емкости, подверженной воздействию внешних сил, в особенности если емкость является частью конструкции фюзеляжа летательного аппарата.
Объектом изобретения является обеспечение нового способа и системы измерения, которые обеспечивают точное и надежное измерение массы топлива, содержащегося в емкости с изменяющейся геометрией, в частности мягких емкостях мембранного типа.
Другим объектом настоящего изобретения является упрощение процесса измерения путем исключения необходимости в дополнительных элементах конструкции, которые обычно требуются для предупреждения движений емкости в определенных направлениях и для крепления емкости к фюзеляжу летательного аппарата. Кроме того, упрощение процесса измерения достигается путем отказа от использования эталонных элементов для расчета данных измерений.
Уровень техники
Измерение количества или объема топлива, содержащегося в топливной емкости, и вывод показаний для членов экипажа является обязательным требованием в аэрокосмической промышленности. Более того, количество топлива, содержащееся в топливной емкости, является критическим параметром, значение которого необходимо знать постоянно, поскольку распределение топлива в емкостях летательного аппарата непосредственно влияет на положение центра тяжести летательного аппарата. Аналогично, данные по остаточному запасу топлива имеют большую важность для контроля расхода топлива двигателями и дозаправок в воздухе, выполнение которых осуществляется непосредственно на основании этих данных.
Существует несколько систем измерения массы топлива в емкости. В самолетах в течение многих лет для этих целей использовались датчики уровня топлива. Такие датчики выполняют измерение емкостного сопротивления жидкости, и, несмотря на широкое распространение таких систем и в наши дни, данная технология может быть использована только в жестких емкостях, поскольку для получения правильных данных о количестве топлива емкость должна иметь постоянную форму.
В качестве альтернативы датчикам уровня топлива для измерения количества топлива используется также система динамометрических элементов, в частности, для контроля количества топлива в наружных емкостях, навешиваемых на летательный аппарат.
В соответствии с вышесказанным документ US 5133212 A определяет измерение объема жидкости, содержащейся в баке, подверженном воздействию внешних нагрузок, при помощи однокооринатных динамометрических элементов. Тем не менее изобретение предполагает, что топливный бак имеет только одну степень свободы и жестко закреплен в двух или трех направлениях в пространстве. Таким образом, изобретение предполагает физическое блокирование перемещений бака в двух направлениях, для чего бак должен быть жестко закреплен на фюзеляже летательного аппарата. Кроме того, в документе описывается требование на использование эталонного динамометрического элемента для определения пространственного положения летательного аппарата.
Также имеется документ FR 2976071 A1, в котором дается описание системы для измерения жидкости, содержащейся в баке, подверженном воздействию внешних нагрузок, при помощи однокоординатных динамометрических элементов. Как и в указанном выше документе, данное изобретение требует использования гироскопов и акселерометров для определения пространственного положения летательного аппарата. Аналогично, французская заявка предполагает, что топливные баки имеют жесткую конструкцию с одной степенью свободы, что опять же накладывает требования на физическое блокирование перемещений бака в двух направлениях и на жесткое крепление бака к фюзеляжу летательного аппарата.
Таким образом, существующие системы измерения массы топлива, содержащегося в емкостях, требуют использования жестких емкостей с одной степенью свободы, обычно по оси рыскания. Данное требование создает необходимость в блокировании перемещений емкости в двух других направлениях, обычно во время крена и тангажа, что невозможно в случае использования емкостей с изменяющейся геометрией.
Таким образом, в аэрокосмической промышленности появилась необходимость в создании новой системы и способа измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, как в случае мягкой емкости мембранного типа, так и в случае емкости, установленной в фюзеляже летательного аппарата и подверженной воздействию внешних нагрузок.
Раскрытие изобретения
В настоящем изобретении указанные выше недостатки преодолены за счет использования новой системы и способа измерения массы топлива, содержащегося в емкости с изменяющейся геометрией. Изобретение позволяет выполнять точное и надежное измерение массы топлива, содержащегося в емкости с изменяющейся геометрией, имеющей три степени свободы. Таким образом, настоящее изобретение позволяет определить массу топлива, содержащегося в мягких емкостях, выполненных из эластомеров или мембранного типа.
Согласно одному из аспектов изобретения, система измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, содержит:
- емкость в сборе, образованную емкостью с изменяющейся геометрией, установленной на жесткой опоре таким образом, что вес емкости полностью приходится на указанную жесткую опору.
- по меньшей мере один трехкоординатный динамометрический элемент, соединенный с жесткой опорой и выполненный с возможностью формирования первого набора трех сигналов (SLCx, SLСy, SLСz), каждый из которых имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве,
- по меньшей мере один трехкоординатный акселерометр, соединенный с жесткой опорой и выполненный с возможностью формирования второго набора трех сигналов (SAx, SAy, SAz), каждый из которых имеет величину, пропорциональную ускорению емкости в сборе в одном из трех направлений в пространстве, и
- устройство обработки сигнала, выполненное с возможностью преобразования первого и второго набора сигналов для получения данных по силе (Fx, Fy, Fz) и ускорению (Ах, Ау, Az) по каждому из трех основных направлений в пространстве и с возможностью вычисления, по данным измерений, массы топлива, содержащегося в емкости с изменяющейся геометрией.
Система может быть использована для емкостей, сохраняющих неподвижность в одном или нескольких направлениях пространства, при этом блокирование перемещения емкости в других направлениях не требуется, да и невозможно в случае мягких емкостей, например, мембранного типа.
Таким образом, при использовании емкостей с изменяющейся геометрией, система позволяет избежать необходимости в блокировании перемещения емкости в одном из направлений пространства и в жестком закреплении указанной емкости в конструкции фюзеляжа летательного аппарата для блокирования перемещения емкости. Данные условия, как было сказано выше, невыполнимы в случае использования емкости с изменяющейся геометрией.
Емкость с изменяющейся геометрией, будучи не заблокированной от перемещений, будет подвержена воздействию на нее сил по трем направлениям пространства - по крену, тангажу и рысканию. Эти силы будут действовать непосредственно на жесткую опору, являющуюся частью конструкции емкости в сборе и на которую воздействует вес самой емкости. С опорой, соответственно, соединен по меньшей мере один трехкоординатный динамометрический элемент. Далее, силы, действующие в трех направлениях, воздействуют непосредственно на, по меньшей мере один трехкоординатный динамометрический элемент, который, соответственно, выполнен с возможностью измерения сил в трех направлениях в пространстве.
Таким образом, по меньшей мере один трехкоординатный динамометрический элемент системы обеспечивает формирование первого набора трех сигналов (SLСx, SLСy, SLCz), каждый из которых имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве. Таким образом, система приобретает способность измерения величин, пропорциональных силе в трех направлениях пространства, с соответствующим расположением в данных направлениях по меньшей мере одного трехкоординатного динамометрических элемента.
Поскольку система содержит, по меньшей мере один трехкоординатный акселерометр, такая система обеспечивает, при использовании устройства обработки сигналов, способность измерения массы топлива, содержащегося в любой момент времени в емкости с изменяющейся геометрией.
Для выполнения данной задачи устройство обработки сигналов выполнено с возможностью преобразования первого набора трех сигналов (SLСx, SLCy, SLCz) и второго набора трех сигналов (SAx, SAy, SAz) в данные силы (Fx, Fy, Fz) и ускорения (Ах, Ау, Az), для каждого из трех основных направлений пространства. Указанное выше устройство обработки сигналов также выполнено с возможностью вычисления по данным измерений массы топлива, содержащегося в емкости с изменяющейся геометрией.
Что касается трех основных направлений в пространстве, было указано, что, и трехкоординатный динамометрический элемент, и трехкоординатный акселерометр обеспечивают формирование сигналов для каждого из трех направлений в собственной пространственной системе координат, поэтому устройство обработки сигналов, кроме всего прочего, выполнено с возможностью преобразования указанных сигналов из различных собственных систем координат в единую и общую систему координат. Таким образом, три основных направления в пространстве относятся к общей системе координат. Тем не менее, указанное преобразование может не понадобиться, если трехкоординатный динамометрический элемент и трехкоординатный акселерометр при монтаже на жесткой опоре были расположены с учетом этих основных направлений в пространстве.
Таким образом, система обеспечивает измерение массы топлива, содержащегося в емкости с изменяющейся геометрией, без необходимости в блокировке перемещений емкости или жестком раскреплении емкости на конструкции фюзеляжа летательного аппарата. Также, такая система уменьшает количество чувствительных элементов, обеспечивающих измерение, в том числе исключая использование эталонных элементов, таких как дополнительная масса, обычно используемая в качестве эталона, что в результате снижает общий вес системы.
Аналогично, за счет обеспечения возможности перемещения емкости с изменяющейся геометрией по трем направлениям в пространстве и состава системы, включающего, по меньшей мере один трехкоординатный динамометрический элемент и один трехкоординатный акселерометр, система обеспечивает надежное измерение массы в случае, если емкость подвержена воздействию внешних нагрузок, например, при размещении на летательном аппарате.
В соответствии с другим аспектом изобретения, способ измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, включает следующие этапы:
- использование емкости в сборе, образованной емкостью с изменяющейся геометрией, расположенной на жесткой опоре таким образом, что вес емкости полностью приходится на указанную жесткую опору,
- формирование по меньшей мере первого набора трех сигналов (SLCx, SLCy, SLCz) посредством трехкоординатного динамометрического элемента, соединенного с жесткой опорой, при этом каждый из указанных трех сигналов имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве,
- формирование по меньшей мере второго набора трех сигналов (SAx, SAy, SAz), посредством трехкоординатного акселерометра, соединенного с жесткой опорой, при этом каждый из трех сигналов имеет величину, пропорциональную ускорению емкости в сборе в одном из трех направлений в пространстве, преобразование первого и второго набора сигналов в цифровые данные, представляющие измеренные силы (Fx, Fy, Fz) и ускорение (Ах, Ау, Az), воздействующих на емкость в сборе в каждом из трех основных направлений в пространстве, для указанных сигналов,
- вычисление для каждого из трех основных направлений в пространстве величины, относящейся к массе топлива, содержащегося в емкости с изменяющейся геометрией, с использованием указанных цифровых данных, относящихся к измеренным силам и ускорению, а также
- вычисление общей величины, относящейся к массе топлива, содержащегося в емкости с изменяемой геометрией.
Таким образом, способ, согласно изобретению, обеспечивает точный и надежный расчет массы топлива, содержащегося в емкости с изменяющейся геометрией, при этом снижая требования по количеству измерительных элементов и вычислений.
Краткое описание чертежей
Для лучшего понимания сути изобретения далее, в качестве иллюстрации и других целей, представлены следующие чертежи:
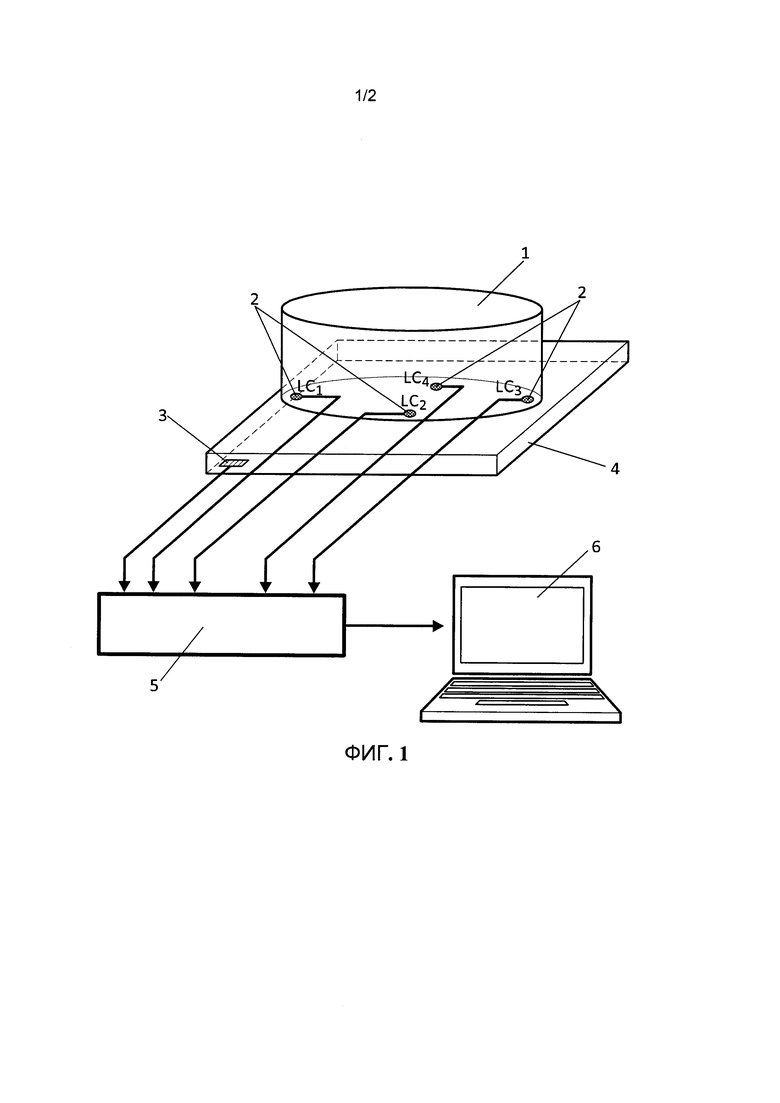
На фиг. 1 показаны элементы, содержащиеся в системе измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, в соответствии с предпочтительным вариантом изобретения.
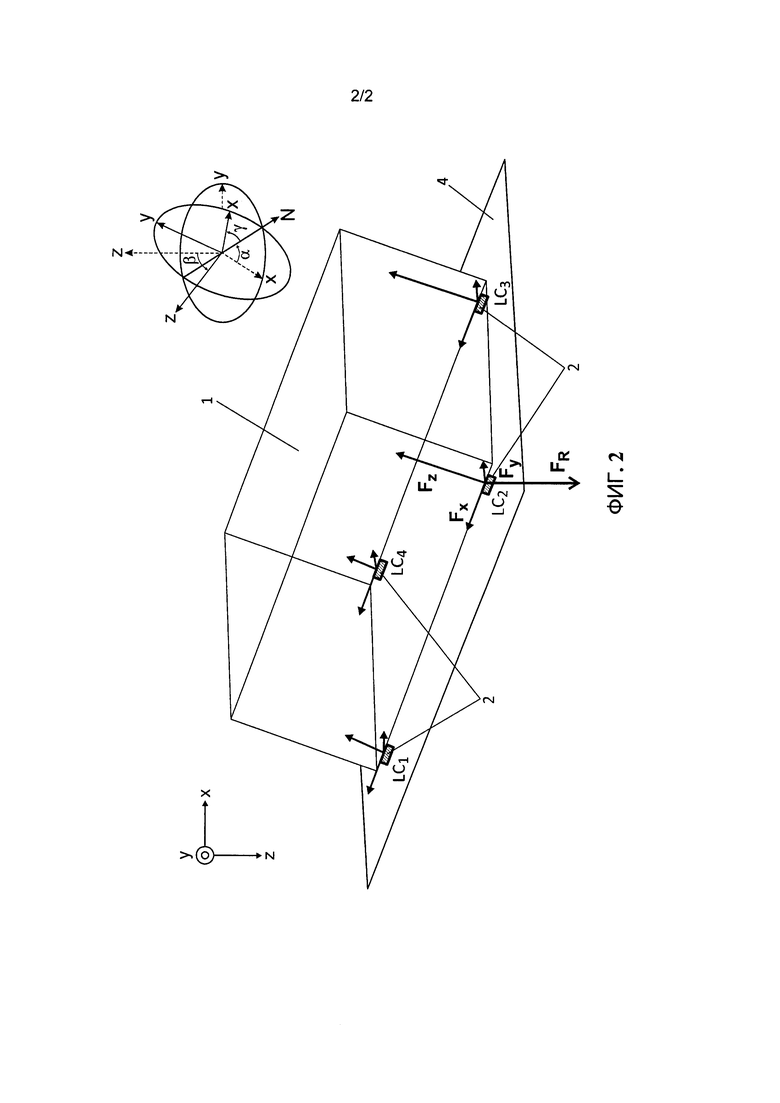
На фиг. 2 показаны продольный разрез емкости с изменяющейся геометрией, четыре трехкоординатных динамометрических элемента, соединенных с жесткой опорой, на которую приходится вес емкости с изменяющейся геометрией, и три основных направления в пространстве, на измерение по которым настроены четыре трехкоординатных динамометрических элемента.
Осуществление изобретения
На фиг. 1 показана система, соответствующая предпочтительному варианту осуществления изобретения. На фиг. 1 показаны емкость в сборе, образованная емкостью (1) с изменяющейся геометрией, расположенной на жесткой опоре (4) таким образом, чтобы вес опоры (1) полностью приходился на жесткую опору (4).
Как показано на фиг. 1 и 2, в соответствии с еще одним предпочтительным вариантом осуществления изобретения, с жесткой опорой (4) соединены четыре трехкоординатных динамометрических элемента (2), размещенных на противоположных краях жесткой опоры (4), при этом каждый из трехкоординатных динамометрических элементов (2) обеспечивает формирование первого набора трех сигналов (SLCx, SLCy, SLCz). Каждый из указанных трех сигналов имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве.
Кроме того, с жесткой опорой (4), как показано на фиг. 1, соединен трехкоординатный акселерометр (3), который обеспечивает формирование второго набора трех сигналов (SAx, SAy, SAz). Каждый из указанных трех сигналов имеет величину, пропорциональную ускорению емкости в сборе в одном из трех направлений в пространстве.
Вес емкости (1) с изменяющейся геометрией распределяется по четырем опорным точкам, которые, согласно еще одному предпочтительному варианту осуществления изобретения, могут являться трехкоординатными динамометрическими элементами (2). Таким образом, каждый отдельный трехкоординатный динамометрический элемент (2) обеспечивает измерение силы (Н), являющейся суммой веса емкости в сборе и сил инерции, например, ввиду ускорения. Поскольку емкость (1) с изменяющейся геометрией формирует усилия по трем направлениям в пространстве, каждый трехкоординатный динамометрический элемент (2) измеряет силы по трем направлениям в пространстве (х, у, z), в зависимости от пространственного положения летательного аппарата (крен, тангаж, рыскание). Каждая сила по каждому направлению преобразуется динамометрическим элементом в аналоговый сигнал, например в напряжение или ток, и передается в устройство (5) обработки сигналов.
Трехкоординатный акселерометр (3) требуется для измерения инерционных эффектов (ускорения) в трех направлениях в пространстве (х, у, z), выходные сигналы с акселерометра передаются на устройство (5) обработки сигналов.
Таким образом, устройство (5) обработки сигналов получает первый набор трех сигналов (SLCx, SLCy, SLCz) от каждого трехкоординатного динамометрического элемента (2) и второй набор трех сигналов (SAx, SAy, SAz) от трехкоординатного акселерометра (3).
Иными словами, каждый из четырех трехкоординатных динамометрических элементов (2) (LC1, LC2, LC3, LC4) обеспечивает формирование первого набора трех сигналов (SLСix, SLCiy, SLCiz), где i=1, 2,…4, а трехкоординатный акселерометр (3) обеспечивает формирование второго набора из трех сигналов (SAx, SAy, SAz). Таким образом, устройство (5) обработки сигналов получает пятнадцать сигналов, двенадцать из которых соответствуют четырем наборам трех сигналов, поступающих от каждого из четырех динамометрических элементов (2), и три сигнала от трехкоординатного акселерометра (3) (SAx, SAy, SAz).
В соответствии с еще одним предпочтительным вариантом осуществления изобретения, устройство (5) обработки сигналов выполнено с возможностью преобразования первого набора сигналов, поступающего от каждого из динамометрических элементов (i; i=1, 2,…,4), и второго набора сигналов, поступающего от акселерометра, в данные силы (Fix, Fiy, Fiz) и ускорения (Ах, Ау, Az) для каждого из трех основных направлений в пространстве (х, у, z). На фиг. 2 показаны три основных направления в пространстве, в отношении которых осуществляется работа четырех трехкоординатных динамометрических элементов (2).
В итоге, указанное выше устройство (5) обработки сигналов, кроме прочего, выполнено с возможностью вычисления по данным измерений массы топлива, содержащегося в емкости (1) с изменяющейся геометрией.
Таким образом, вариант осуществления изобретения, показанный на фигурах, предполагает, что из каждого первого набора из трех сигналов (SLСix, SLCiy, SLCiz), где i=1, 2,…4, устройство (5) обработки сигналов получает набор сигналов, относящихся к силе (Fix, Fiy, Fiz), где i=1, 2,…4, для каждого из трех основных направлений в пространстве (х, у, z).
В предпочтительном варианте осуществления, с использованием фундаментальных принципов динамики для каждого из основных направлений пространства и с учетом того, что масса емкости в сборе является суммой данных измерений четырех трехкоординатных динамометрических элементов (2), далее вычисляется величина (m), относящаяся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией.



В соответствии с еще одним предпочтительным вариантом осуществления изобретения, устройство (5) обработки сигналов выполнено с возможностью вычисления массы (М) топлива в виде результата деления суммы сил, действующих в трех основных направлениях в пространстве, на ускорение емкости в сборе по тем же направлениям, с последующим вычитанием веса порожней емкости (Wo).

В соответствии с еще одним предпочтительным вариантом осуществления, показанном на фиг. 1, система содержит систему (6) отображения, выполненную с возможностью отображения и контроля данных вычисления массы топлива. Как показано на фигуре, система (6) отображения осуществляет обмен данными с устройством (5) обработки сигналов.
В соответствии с еще одним предпочтительным вариантом осуществления, устройство (5) обработки сигналов содержит аналогово-цифровой преобразователь (АЦП) для преобразования первого и второго наборов сигналов в данные силы (Fx, Fy, Fz) и ускорения (Ах, Ау, Az).
В предпочтительном варианте осуществления изобретения жесткая опора (4) представляет собой платформу. Платформа является плоской конструкцией, служащей в качестве опоры для емкости в сборе и для подъема всего узла в целях его транспортировки.
В соответствии с еще одним предпочтительным вариантом осуществления, трехкоординатный динамометрический элемент (2) является тензометрическим динамометрическим элементом и выполнен с возможностью формирования аналоговых сигналов напряжения, соответствующих первому набору трех сигналов (SLCx, SLCy, SLCz).
В соответствии с еще одним предпочтительным вариантом осуществления, емкость (1) с изменяющейся геометрией является переносной и выполнена из гибкого материала. Такая переносная емкость имеет в авиации термин "подвесной бак", что относится к вспомогательным топливным бакам, закрепляемым снаружи на фюзеляже летательного аппарата.
В предпочтительном варианте осуществления в качестве устройства обработки сигналов используется компьютер, процессор цифровой обработки сигналов, специальная интегральная схема, микропроцессор, микроконтроллер или любой другой вид программируемых технических средств, а для настройки параметров используется компьютерная программа, содержащая программный код, осуществляющий выполнение вышеуказанных операций при запуске программы на устройстве обработки сигнала.
Согласно еще одному аспекту изобретения, способ измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, включает следующие этапы:
- использование емкости в сборе, образованной емкостью (1) с изменяющейся геометрией, расположенной на жесткой опоре (4) таким образом, что вес емкости (1) полностью приходится на указанную жесткую опору (4),
формирование по меньшей мере первого набора трех сигналов (SLCx, SLCy, SLCz) посредством трехкоординатного динамометрического элемента (2), соединенного с жесткой опорой (4), при этом каждый из указанных трех сигналов имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве,
- формирование по меньшей мере второго набора трех сигналов (SAx, SAy, SAz), посредством трехкоординатного акселерометра (3), соединенного с жесткой опорой (4), при этом каждый из трех сигналов имеет величину, пропорциональную ускорению емкости в сборе в одном из трех направлений в пространстве,
- преобразование первого и второго набора сигналов в цифровые данные, косвенно представляющие измеренные силы (Fx, Fy, Fz) и ускорение (Ах, Ау, Az), воздействующих на емкость в сборе в каждом из трех основных направлений в пространстве, для указанных сигналов,
- вычисление для каждого из трех основных направлений в пространстве величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, с использованием указанных цифровых данных, относящихся к измеренным силам и ускорению,
- вычисление общей величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяемой геометрией.
В соответствии с еще одним предпочтительным вариантом осуществления, этап вычисления величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, состоит из деления суммы измеренных сил, воздействующих по трем основным направлениям в пространстве, на ускорение емкости в этих же направлениях.
Таким образом, в соответствии с вариантом осуществления, показанным на фиг. 1 и 2, величина, относящаяся к массе топлива (m), содержащегося в емкости (1) с изменяемой геометрией, рассчитывается следующим образом:



В соответствии с еще одним предпочтительным вариантом осуществления, этап вычисления общей величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, включает этап определения общей массы топлива (
Аналогично, для варианта осуществления, показанного на фиг. 1 и 2, общая величина (М), относящаяся к массе топлива, содержащегося в емкости (1) с изменяемой геометрией, рассчитывается следующим образом:

В предпочтительном варианте осуществления, функция, которая использует все вычисленные величины, относящиеся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, для каждого из трех основных направлений в пространстве, состоит из среднего арифметического, или медианы, или из функции средневзвешенной величины.
Таким образом, для предпочтительного варианта осуществления, показанного на фиг. 1 и 2, 
В уравнениях 5.1, 5.2 и 5.3, величины, касающиеся массы топлива (m), содержащегося в емкости (1) с изменяющейся геометрией, для каждого из трех основных направлений в пространстве (х, у, z), по большей части равны, за исключением случая, в котором результирующая сила действует в плоскости, параллельной плоскости, образованной двумя из трех основных направлений (х, у, z). Например, это может быть случай, когда емкость (1) с изменяющейся геометрией находится в горизонтальном положении (т.е. все силы действуют по оси х, при этом Fx=Fy=0), и не подвержена каким-либо ускорениям по оси z (Ау=Az=0), в результате чего уравнения 5.2 и 5.3 становятся неопределенными. Таким образом, в данном случае, одно или два из уравнений 5.1-5.3 становятся математически неопределенными, и должно использоваться третье уравнение.
В качестве альтернативы данному исключению и для обеспечения более надежного способа измерения способ включает дополнительный этап вычислений для отбрасывания ошибок и/или отказов.
В соответствии с еще одним предпочтительным вариантом осуществления, способ дополнительно включает этап отображения и контроля измеренной общей величины, относящейся к массе топлива, содержащегося в емкости (1) с измеряемой геометрией, посредством системы (6) отображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| СПОСОБ ГРАВИТАЦИОННОЙ ГРАДИОМЕТРИИ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2298211C2 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ И ВИБРОЗАЩИТЫ, В КОТОРОЙ ПРИМЕНЯЮТСЯ НИЗКОФРИКЦИОННЫЕ ТРОСОВЫЕ ДЕМПФЕРЫ | 2014 |
|
RU2645561C2 |
| МНОГОКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР С ОДНОЙ МАССОЙ | 2016 |
|
RU2733974C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ C И С НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЬНОЙ УСТАНОВКИ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2503941C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛА И СПОСОБ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛА | 1992 |
|
RU2100794C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА, ПРОХОДЯЩЕГО ПО ПОВЕРХНОСТИ РУЛЕЖНОЙ ДОРОЖКИ (ВАРИАНТЫ), И СПОСОБЫ ЕЁ ИСПОЛЬЗОВАНИЯ | 2017 |
|
RU2745837C2 |
Изобретение относится к измерительной технике и может быть использовано в аэрокосмической промышленности, в частности в летательных аппаратах для измерения массы топлива. Система содержит емкость в сборе, образованную емкостью с изменяющейся геометрией, соединенной с жесткой опорой, трехкоординатный динамометрический элемент, соединенный с жесткой опорой и выполненный с возможностью формирования первого набора трех сигналов с величиной, пропорциональной силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве, трехкоординатный акселерометр, соединенный с жесткой опорой и выполненный с возможностью формирования второго набора трех сигналов с величиной, пропорциональной ускорению емкости в сборе в одном из трех направлений в пространстве, и устройство обработки сигналов, выполненное с возможностью преобразования первого и второго набора сигналов в данные силы и ускорения для трех основных направлений в пространстве, и с возможностью вычисления, по данным измерений, величины, относящейся к массе топлива, содержащегося в емкости с изменяемой геометрией. 2 н. и 11 з.п. ф-лы, 2 ил. 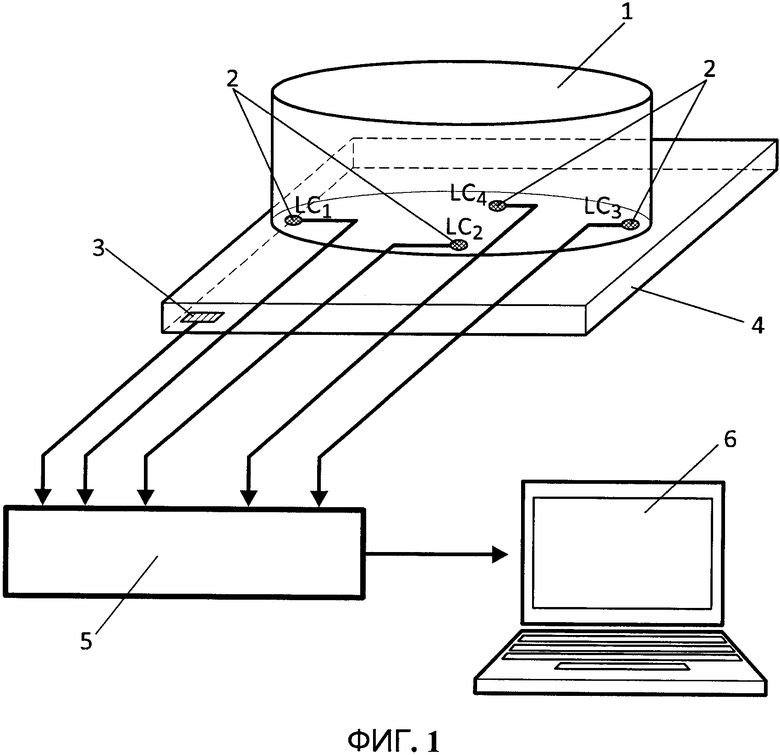
1. Система для измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, содержащая:
емкость в сборе, образованную емкостью (1) с изменяющейся геометрией, расположенной на жесткой опоре (4) таким образом, что вес емкости (1) полностью приходится на указанную жесткую опору (4),
по меньшей мере один трехкоординатный динамометрический элемент (2), соединенный с жесткой опорой (4) и выполненный с возможностью формирования первого набора трех сигналов (SLCx, SLCy, SLCz), каждый из которых имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве,
по меньшей мере один трехкоординатный акселерометр (3), соединенный с жесткой опорой (4) и выполненный с возможностью формирования второго набора трех сигналов (SAx, SAy, SAz), каждый из которых имеет величину, пропорциональную ускорению емкости в сборе в одном из трех направлений в пространстве,
устройство (5) обработки сигнала, выполненное с возможностью преобразования первого и второго наборов сигналов для получения данных по силе (Fx, Fy, Fz) и ускорению (Ах, Ay, Az) для каждого из трех основных направлений в пространстве и с возможностью вычисления по данным измерений массы топлива, содержащегося в емкости (1) с изменяющейся геометрией.
2. Система по п. 1, в которой устройство (5) обработки сигналов выполнено с возможностью вычисления массы топлива в виде результата деления суммы сил, действующих в одном из трех основных направлений в пространстве, на ускорение емкости в сборе в том же направлении, с последующим вычитанием известного веса порожней емкости.
3. Система по любому из пп. 1 и 2, в которой устройство (5) обработки сигналов содержит аналогово-цифровой преобразователь (АЦП) для преобразования первого и второго наборов сигналов в данные по силе (Fx, Fy, Fz) и ускорению (Ах, Ау, Az).
4. Система п. 1, содержащая четыре трехкоординатных динамометрических элемента (2), расположенных на противоположных краях жесткой опоры (4).
5. Система п. 1, в которой жесткая опора (4) выполнена в виде платформы.
6. Система п. 1, в которой трехкоординатный динамометрический элемент (2) представляет собой тензометрический динамометрический элемент и выполнен с возможностью формирования аналоговых сигналов напряжения, соответствующих первому набору трех сигналов (SLCx, SLCy, SLCz).
7. Система п. 1, в которой емкость (1) с изменяющейся геометрией представляет собой переносную емкость и выполнена из гибкого материала.
8. Система п. 1, дополнительно содержащая систему (6) отображения, выполненную с возможностью отображения и контроля вычисленной массы топлива.
9. Способ измерения массы топлива, содержащегося в емкости с изменяющейся геометрией, включающий следующие этапы:
использование емкости в сборе, образованной емкостью (1) с изменяющейся геометрией, расположенной на жесткой опоре (4) таким образом, что вес емкости (1) полностью приходится на указанную жесткую опору (4),
формирование по меньшей мере первого набора трех сигналов (SLCx, SLCy, SLCz) посредством трехкоординатного динамометрического элемента (2), соединенного с жесткой опорой (4), при этом каждый из трех сигналов имеет величину, пропорциональную силе, воздействующей на емкость в сборе в одном из трех направлений в пространстве,
формирование по меньшей мере второго набора трех сигналов (SAx, SAy, SAz) посредством трехкоординатного акселерометра (3), соединенного с жесткой опорой (4), при этом каждый из трех сигналов имеет величину, пропорциональную ускорению емкости в сборе в одном из трех направлений в пространстве,
преобразование первого и второго наборов сигналов в цифровые данные, представляющие измеренные силы (Fx, Fy, Fz) и ускорение (Ах, Ay, Az), воздействующие на емкость в сборе в каждом из трех основных направлений в пространстве, для указанных сигналов,
вычисление для каждого из трех основных направлений в пространстве величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, с использованием указанных цифровых данных, относящихся к измеренным силам и ускорению,
вычисление общей величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией.
10. Способ по п. 9, в котором этап вычисления величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, состоит из деления суммы измеренных сил, воздействующих в трех основных направлениях в пространстве, на ускорение емкости в этих же направлениях.
11. Способ по п. 9 или 10, в котором этап вычисления общей величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, включает этап определения общей массы топлива в виде результата функции, в которой используются все вычисленные величины, относящиеся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, для каждого из трех основных направлений в пространстве, и этап вычитания известного веса порожней емкости из общей массы.
12. Способ по п. 11, в котором функция, которая использует все вычисленные величины, относящиеся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, для каждого из трех основных направлений в пространстве состоит из среднего арифметического, или медианы, или из функции средневзвешенной величины.
13. Способ по п. 9, который дополнительно включает этап отображения и контроля измеренной общей величины, относящейся к массе топлива, содержащегося в емкости (1) с изменяющейся геометрией, посредством системы (6) отображения.
| FR 2976071 A1 07.12.2012 | |||
| DE 102010045652 A1 22.03.2012 | |||
| US 6434494 B1 13.08.2002 | |||
| 0 |
|
SU156046A1 | |

