Настоящее изобретение относится к способам и устройствам измерения гравитационного ускорения и градиента гравитационного ускорения (далее гравитационного градиента) и, в частности, к способам и устройствам использования и измерения локальных вариаций гравитационного поля тел земного происхождения.
Сила локального гравитационного поля зависит от близости к массе объекта. Масса объекта, в свою очередь, зависит от плотности материала объекта и величины объекта. Соответственно, вариации плотности геологических структур, таких как минеральные депозиты, топливные резервуары, подземные, туннели или полости имеют специфический гравитационный портрет. Такие портреты, если их измерить с достаточной точностью, могут быть использованы для идентификации соответствующих реологических структур.
Соответственно, несмотря на то, что в отношении большей части приложений применительно к поверхности Земли гравитационное ускорение принято считать относительно постоянным, гравитационное ускорение, на самом деле, имеет отличающиеся значения в зависимости от места измерения. Такая разница в гравитационном ускорении является результатом вариаций плотности материалов, складывающих земную поверхность (или тел небесного происхождения, таких как астероиды, лунные породы и им подобные). Например, результат измерения гравитационного ускорения над сетью больших подземных пещер (т.е. областей с относительно малой массой) будет иметь меньшее значение, чем результат аналогичного измерения, сделанного над депозитом никеля большого размера.
В сравнении с абсолютным средним значением гравитационного ускорения на поверхности Земли вариации гравитационного ускорения имеют достаточно малые значения. Гравитационное ускорение на поверхности Земли, осредненное относительно массы Земли, имеет номинальное значение 9,81 метров в секунду в секунду (м/с2). Массу тела, предназначенного для измерения ускорения в значении 9,81 м/с2, часто принимают 1 g. Вариации гравитационного ускорения часто измеряют в миллигаллах (мгал), определяемых как 10-5 м/с и который приблизительно равен одной миллионной грамма. Гравитационный градиент, определяемый как отношение изменения гравитационного ускорения к расстоянию, имеет единицу измерения м/с2/м (или 1/с2). Для удобства, принята единица измерения гравитационного градиента Иотвос, где один Иотвос (Ио) равен 10-9 м/с2/м, т.е. 10-9 /с2 или 10-4 мгал/метр.
Гравитационное ускорение, обусловливаемое объектом, уменьшается обратно пропорционально квадрату расстояния до объекта (т.е. по мере того, как расстояние до объекта удваивается, гравитационное ускорение, обусловленное объектом, уменьшается в четыре раза), а также увеличивается прямо пропорционально массе такого объекта. Направление приложения гравитационного ускорения зависит от распределения масс внутри объекта. На большом расстоянии от объекта гравитационное ускорение направлено к центру масс объекта. Однако ближе к поверхности объекта, сила и направление гравитационного ускорения зависят от конкретного распределения масс различного значения около поверхности объекта. Например, вблизи поверхности Земли гравитационное ускорение, обусловленное Землей, будет варьироваться в зависимости от распределения масс вблизи ее поверхности. Например, вблизи основания горы гравитационное ускорение будет иметь небольшую составляющую, направленную горизонтально основанию горы, и большую по значению составляющую, направленную в направлении к центру Земли. Вблизи вершины горы горизонтальная составляющая будет иметь значительно меньшее значение. В трехмерном пространстве гравитационное ускорение может быть выражено вектором, имеющим три составляющие (каждая в своем направлении): gx, gy и gz. Величина этих трех составляющих и, соответственно, величина и направление совокупного гравитационного ускорения будет, таким образом, пространственно варьироваться в соответствии с конкретным распределением масс внутри гравитирующего объекта. Гравитационный градиент (G) является мерой отношения разницы значений гравитационного ускорения к расстоянию между точками, соответствующими этим значениям. Таким образом, по мере, к примеру, измерения гравитационного ускорения в различных точках значения gx, gy и gz будут изменяться. В общем, каждая из этих трех составляющих гравитационного ускорения будет изменяться, в свою очередь, в своих трех пространственных координатах. Это приводит к определению гравитационного градиента G тензором, имеющим девять составляющих. Составляющие тензора гравитационного градиента различают символически в соответствии с тем, которая из составляющих гравитационного ускорения имеется в виду и в каком направлении имеется в виду ее изменение. Таким образом, символ Gxz определяет отношение изменения составляющей ускорения gx в вертикальном направлении (z). В качестве примера, если составляющую гравитационного ускорения gx измеряют вдоль линии, проходящей вертикально по отношению к основанию долины, а гора сужается от основания к вершине, то гравитационное поле, измеряемое в направлении х, будет уменьшаться. Отношение изменения gx в вертикальном направлении представляют символом Gxz. Гравитационная составляющая в направлении х будет также изменяться и по горизонтальной линии (т.е. при постоянном z), приобретая большее значение по мере приближения к горе. Эта составляющая гравитационного градиента будет иметь символ Gxx. Кроме этого, гравитационное ускорение в направлении х будет изменяться, в общем случае, вдоль горизонтальной линии и в направлении у. Эта составляющая гравитационного градиента будет обозначаться Gxy. Аналогично, изменения гравитационного ускорения по отношению двух других составляющих (gy и gz) по мере того, как измерения каждого из них будут проводиться в каждом из трех направлений, будут представлены, соответственно, обозначениями Gyx, Gyy, Gyz, Gzx, Gzy и Gzz. Совокупность этих девяти составляющих гравитационного градиента образуют понятие, известное как тензор гравитационного градиента.
Gzz, вертикальней гравитационный градиент близок на поверхности Земли к величине 3000 Ио, т.е. 3·10-6 м/с2/м, при том, что колебания величины Gzz в отношении минеральных депозитов могут находиться в диапазоне от 1 Ио до 100 Ио.
В соответствии с общим законом физики известно, что в точке бесконечно малого приближения ускорение, обусловленное гравитацией, становится неразличимым от ускорений, вызванных другими причинами. Это значит, что любое устройство, способное определять ускорение, обусловленное гравитацией, также будет реагировать и на ускорения, вызванные другими причинами. В соответствии с этим, существующие в настоящее время устройства, способные улавливать ускорение с достаточными разрешением и точностью для выделения вариаций гравитационного ускорения, обусловленного геологическими структурами, обычно являются стационарными приборами с привязкой к Земле в отличие от приборов, смонтированных на борту подвижного средства передвижения или автономного средства. Отличия обусловлены вышеуказанной трудностью в выделении вариаций гравитационных ускорений, вызванных влиянием геологических структур, от ускорений подвижного транспортного или автономного средств, в которых такие приборы устанавливают.
Гравиметр представляет собой устройство, используемое иногда для геологического исследования значений гравитационных ускорений Земли. Многократные намерения гравитационного ускорения в различных точках поверхности могут позволить создать карту значений таких ускорений, которая может быть использована для локализации геологических особенностей. Простой гравиметр представляет обычно собой акселерометр (устройство для измерения ускорений) в виде груза, подвешенного на струне, перемещения которого ограничены только одним направлением, т.е. выверенного в вертикальном или направлении z вдоль оси струны. Ускорение вдоль этой оси z вынуждает струну отклоняться. Отклонение может быть выделено для выработки некоторой величины, пропорциональной ускорению в направлении z за вычетом ускорения, обусловленного гравитацией в направлении той же оси (т.е. величины, равной аz-gz).
Как было сказано выше, вариация гравитационного ускорения, обусловленного аномалией, имеет очень небольшую величину в сравнении с основным гравитационным ускорением, а также часто очень малую величину и в сравнении с ускорением самого средства перемещения. Поскольку гравиметр не может выделять ускорения движущегося средства перемещения и изменения в гравитационном ускорении (которые могут быть несколькими порядками меньше по величине), точные измерения вариации гравитационного ускорения путем использования такого прибора в подвижном средстве перемещения являются чрезвычайно трудной задачей. Попытки выделить составляющую ускорения транспортного средства из измеряемой величины ускорения (например, за счет использования системы глобального позиционирования (СГП) для генерации значений осредненной величины ускорений транспортного средства) внесли улучшения, но не привели к созданию систем с достаточно высоким разрешением для эффективною использования с воздуха, в частности для исследования минеральных депозитов.
Хорошо известно, что альтернативой прямому измерению гравитационного ускорения с борта подвижного средства перемещения является прямое измерение одной или более составляющих тензора гравитационного градиента, описанного выше. Измерение составляющих гравитационного градиента может иметь значительные преимущества.
Было отмечено, что несмотря на то, что вариации гравитационного ускорения, обусловленного аномалиями плотности, могут иметь небольшую величину в сравнении с основным гравитационным ускорением, относительные колебания значения гравитационного градиента, обусловленного аномалией плотности, вблизи поверхности, могут иметь значительно большую величину относительно типичных значений гравитационных градиентов на поверхности Земли. Локальное гравитационное ускорение (которое зависит от массы объекта и близости к этой массе) убывает пропорционально квадрату расстояния до этой массы (закон гравитации Ньютона), в то время, как гравитационный градиент (являющийся пространственной производной) убывает пропорционально кубу расстояния до массы. В результате было показано, что измерение гравитационного градиента напрямую имеет преимущества для целей локализации геологических особенностей, распространяющихся в пределах нескольких километров от поверхности Земли.
Как показано на Фиг.9 простой гравитационный градиометр 1300 (прибор для измерения гравитационного градиента) представляет собой балансировочную балку 1302 с равными массами по каждую сторону от точки опоры 1304 и пружину вращения, сопротивляющуюся вращению. При отсутствии гравитационного градиента (т.е. гравитационное ускорение равномерно) гравитационные силы, действующие с обеих сторон балки относительно ее точки опоры, будут равны и балка не будет осуществлять вращательных движений. Однако в неравномерном гравитационном поле балансировочная балка, если не занимает вертикального положения, будет поворачиваться относительно точки своей опоры 1304 при том, что на одну сторону балки будет действовать большая гравитационная сила m(g0+Δg), а на другую сторону балки будет действовать относительно меньшая гравитационная сила m(g0). Величина отклонения (которая скорее всего очень мала) пропорциональна разнице (т.е. гравитационному градиенту, умноженному на длину рычага) и обратно пропорциональна вращательной жесткости опоры. Ускорение смещения точки опоры и, вместе с ней, балансировочной балки не вызовет никакого вращения. В этом заложено принципиальное преимущество гравитационного радиометра.
Важным улучшением гравитационного градиометра с одной балкой является гравитационный градиометр с двумя балками типа "пересекающихся противовесов". В таком гравитационном градиометре противовесы могут быть выполнены в виде простых брусков прямоугольного сечения (Фиг.6).
Под влиянием номинального вертикального гравитационного градиента Gzz около поверхности Земли противовесы начнут сходится (т.е. поворачиваться в противоположных направлениях) до достижения положения равновесия. При переносе прибора в область над большей массой, вызывая большее значение Gzz, бруски слегка сомкнутся в новом положении равновесия.
Однако все гравитационные градиометры, включая гравитационные градиометры с противовесами, испытывают при их установке на подвижном транспортном средстве некоторые колебания в результате отклонения транспортного средства от заданной траектории, а также внутренние вибрации элементов транспортного средства. Эти колебания могут вызвать вибрацию чувствительных элементов прибора, генерируя этим случайные и достаточно большие отклонения балок, создавая этим трудности для идентификации поворотов балок в результате действия гравитационного градиента.
Возникает необходимость в системе, которая смогла бы учитывать указанные отклонения от идеальной траектории и вибрации. Настоящий анализ показывает, что такая система обеспечит улучшение измерения гравитационных градиентов и представит значительные преимущества, особенно для геофизических приложений. Настоящее изобретение предполагает, что гравитационный градиометр может быть совмещен с двухступенчатой системой фильтрации компонентов движения с активным управлением. Гравитационный градиометр и двухступенчатая система фильтрации могут быть смонтированы внутри (или на) подвижном транспортном средстве, таком, как, например, летательный аппарат.
Несмотря на то, что описываемый специфический вид гравитационного градиометра является примером преимущественного применения, настоящее изобретение может быть также реализовано применительно к другим типам гравитационных градиометров.
Колебания транспортного средства могут быть оценены измерением сопутствующих ускорений, будь они связаны с отклонениями транспортного средства от идеальной траектории или внутренними вибрациями компонентов транспортного средства. Авторами настоящего изобретения было показано, что ускорения, воздействующие на летательный аппарат или другое подвижное транспортное средство во время его штатной эксплуатации, могут быть выделены аппаратными средствами в относительно различимые режимы в отношении полосы частот. Изобретение предлагает систему фильтрации с активным управлением режимов транспортного средства и гравитационного градиометра, который может быть построен с учетом частотного режима и различных характеристик отклика гравитационного градиометра, а также различным внешним факторам (пространственные ограничения кабины и ускорения транспортного средства могут быть специфическими для различных транспортных средств). Изобретение предлагает двухступенчатую (с грубой и тонкой ступенями) систему фильтрации, которая эффективно разделяет ускорения на два частотных режима. Первая ступень фильтрации или блок гасит ускорения (и результирующие перемещения), находящиеся, в частности, и низкочастотном диапазоне. Эта ступень создает относительно большие перемещения гравитационного градиометра относительно конструкции летательного аппарата посредством действия Блока Грубой Фильтрации (БГФ). БГФ ограничивает относительные перемещения приложением слабой восстанавливающей силы так, что вероятность достижения полезным грузом (например, гравитационным градиометром) физических пределов системы (т.е. кабины транспортного средства) при нормальной работе небольшая. При этом, БГФ будет иметь свою собственную динамику и будет неизбежно вносить некоторую высокочастотную составляющую колебаний. Вторую ступень фильтрации монтируют (или размещают внутри) с первой ступенью фильтрации для снижения линейных ускорений по всем трем осям, в частности в высокочастотном диапазоне, включая те, которые могут быть пропущены БГФ или даже усилены его динамикой. Эта вторая ступень фильтрации также обеспечивает фильтрацию вращательных колебаний относительно всех трех осей.
Гравитационный градиометр или система гравитационной градиометрии (гравитационный градиометр с его размещением в сосуде Дюара в случае применения криогенных гравитационных градиометров) монтируют со вторым блоком фильтрации. В результате размещения гравитационного градиометра внутри или совокупно с системой фильтрации (комбинации первого и второго блоков фильтрации) гравитационный градиометр в значительной степени становится изолированным от ускорений, испытываемых подвижным транспортным средством.
Конкретные рабочие характеристики системы фильтрации, объединяющей первый и второй блоки фильтрации, разрабатывают имея в виду следующее: (1) конкретные атмосферные условия и характеристики транспортного средства применительно к этим атмосферным условиям, а также (2) конкретные характеристики гравитационного градиометра.
Результатом применения этой системы является то, что сигналы, соответствующие гравитационным градиентам, измеряемые гравитационным градиометром, относительно свободны от случайных сигналов, производимых как поступательными, так и вращательными ускорениями, что и позволяет получать ранее недостижимые разрешение и точность.
Результат достигается применением устройства измерения гравитационного градиента для размещения на транспортном средстве, включающим блок ступени грубой фильтрации, предназначенный для ослабления перемещений, передающихся на устройство измерения гравитационного градиента, выше первой граничной частоты пропускания, блок ступени тонкой фильтрации, предназначенный для ослабления вибраций, передающихся на устройство измерения гравитационного градиента, выше второй граничной частоты пропускания, при том, что вибрации выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций, при том, что блок ступени тонкой фильтрации смонтирован с блоком ступени грубой фильтрации; а гравитационный градиометр смонтирован с блоком ступени тонкой фильтрации.
Кроме этого гравитационный градиометр может включать в себя чувствительный элемент типа пересекающихся противовесов.
Блок ступени грубой фильтрации имеет настройку на первую частоту собственных колебаний, которая превышает вторую граничную частоту пропускания.
Блок ступени грубой фильтрации управляет перемещением блока ступени тонкой фильтрации относительно транспортного средства.
Устройство может представлять подвижное транспортное средство, в которое вмонтирован блок ступени грубой фильтрации и которое включает систему навигации и систему управления полетом, при том, что система управления полетом и система навигации взаимодействуют с целью управления траекторией полета подвижного транспортного средства, а система управления полетом имеет возможность быть управляемой, по крайней мере, одним пилотом и системой автопилота. Блок ступени грубой фильтрации имеет связь с системой навигации, позволяя блоку ступени тонкой фильтрации за счет этой связи перемещаться вдоль траектории полета в сглаженном режиме или без естественных смещений подвижного транспортного средства от этой траектории.
Гравитационный градиометр измеряет составляющие гравитационного градиента или параметры, находящиеся в функциональной зависимости от составляющих гравитационного градиента.
Устройство может включать подвижное транспортное средство, несущее блок ступени грубой фильтрации, блок ступени топкой фильтрации и гравитационный градиометр.
Устройство представляет собой транспортное средство из ряда: летальный аппарат, корабль, аппарат с возможностью погружения под воду, наземное транспортное средство, подводная лодка.
Блок ступени грубой фильтрации включает систему управления определением и контролем положения блока ступени тонкой фильтрации, по крайней мере, в одной из трех степеней свободы.
Блок ступени грубой фильтрации включает систему управления определением и контролем положения блока ступени тонкой фильтрации относительно сглаженного режима траектории летательного аппарата или другого подвижного транспортного средства, при том, что управление ограничено внутренними размерами подвижного транспортного средства.
Блок ступени тонкой фильтрации включает систему управления определением и контролем положения гравитационного градиометра в шести степенях свободы, связанных с движением твердого тела.
Система управления блока ступени грубой фильтрации направляет блок ступени тонкой фильтрации в направлении исходного положения, при том, что исходное положение измеряют относительно грубой ступени.
Величина первой граничной частоты пропускания может регулироваться в соответствии с характеристиками движения выбранного транспортного средства и характеристиками определения ускорений гравитационным градиометром.
Блок ступени тонкой фильтрации включает систему управления определением и контролем положения гравитационного градиометра в шести степенях свободы, связанных с движением твердого тела.
Устройство содержит совокупность функциональных элементов, обеспечивающих связь между перемещениями и вибрациями, при том, что каждый из функциональных элементов связан, по крайней мере, с одной степенью свободы, и каждый такой функциональный элемент имеет возможность независимой настройки граничной частоты пропускания.
Блок ступени точной фильтрации дополнительно включает: базу, флоутер, имеющий магнитную связь с базой, и образующий блок гравитационного градиометра, совокупность акселерометров для измерения вибраций, совокупность датчиков положения для измерения относительного положения флоутера по отношению к базе в шести степенях свободы движения твердого тела, при том, что база смонтирована с блоком ступени грубой фильтрации.
В качестве акселерометров используют, по крайней мере, один из линейных акселерометров, гироскопов или ротационных акселерометров.
Устройство фильтрации для обеспечения измерения гравитационного градиента подвижного транспортного средства включает блок ступени грубой фильтрации, предназначенный для ослабления действия перемещений, характеризуемых режимом первой частоты, выше первой граничной частоты пропускания, и включающий опорную платформу, блок ступени тонкой фильтрации, предназначенный для ослабления влияния вибраций, характеризуемых минимальной частотой, выше второй граничной частоты пропускания, при том, что вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций, и включающий базу, смонтированную с опорной платформой; и элемент, имеющий переменное положение относительно базы, при том, что гравитационный градиометр имеет возможность быть смонтированным с указанным элементом блока ступени тонкой фильтрации.
Первая граничная частота пропускания и вторая граничная частота пропускания имеют возможность независимой регулировки.
Устройство измерения гравитационных градиентов включает: средства фильтрации перемещений выше первой граничной частоты пропускания, средства фильтрации вибраций выше второй граничной частоты пропускания, при том, что вибрации выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций, гравитационный градиометр, смонтированный с указанными средствами фильтрации вибраций; а средства фильтрации вибраций смонтированы со средствами фильтрации перемещений.
Средства фильтрации вибраций представляют собой, по крайней мере, одно из устройств с пневматической или магнитной подвеской.
Кроме этого, результат достигают применением способа получения данных гравитационного градиента с высоким разрешением, который включает: транспортирование гравитационного градиометра на борту подвижного транспортного средства, испытывающего ускорения и перемещения, фильтрацию на ступени грубой обработки ускорений и перемещений выше первой граничной частоты пропускания, фильтрацию на ступени тонкой обработки ускорений и перемещений выше второй граничной частоты пропускания, при том, что ускорения и перемещения выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций, отслеживание положения подвижного транспортного средства в шести степенях свободы подвижности твердого тела, измерение гравитационным градиометром гравитационных градиентов в момент фильтрации указанных ускорений и перемещений на ступенях грубой и тонкой обработки; и табулирование гравитационных градиентов в функции положения подвижного транспортного средства.
Отслеживание включает идентификацию положения подвижного транспортного средства с использованием, по крайней мере, одной из инерциальной навигационной системы (ИНС) и системы глобального позиционирования (СГП).
Фильтрация ускорений и перемещений на ступени тонкой обработки включает: измерение ускорений флоутера, имеющего магнитную подвеску относительно базы, при том, что магнитная подвеска флоутера относительно базы осуществлена за счет электромагнитов, измерение относительного положения флоутера по отношению к базе; и компенсацию указанных ускорений путем пропускания переменного тока через электромагниты.
Фильтрация ускорений и перемещений на ступени грубой обработки включает измерение ускорений ступени тонкой фильтрации, измерение относительного положения ступени тонкой фильтрации; и противодействие указанным ускорениям путем приложения противодействующей силы.
Фильтрация указанных ускорений и перемещений на ступени грубой обработки дополнительно включает: определение положения ступени тонкой обработки относительно подвижного транспортного средства, приложение сил к ступени тонкой обработки пропорционально измеренному отклонению от первоначального положения с тем, чтобы вернуть ее в первоначальное положение относительно подвижного транспортного средства.
Еще одним объектом изобретения является карта гравитационных градиентов тела, сформированная компьютером общего назначения, имеющим возможность: получать сигналы гравитационного градиента от гравитационного градиометра, смонтированного на блоке фильтрации тонких перемещений, смонтированном с блоком фильтрации грубых перемещений, размещаемом на транспортном средстве, получать сигналы положения, отслеживая положение транспортного средства относительно Земли; и табулировать сигналы гравитационного градиента в функции сигналов положения, получаемых таким образом, чтобы генерировать карту гравитационных градиентов участка земной поверхности.
Сигналы положения получают от навигационной системы.
Еще одним объектом изобретения является информационная среда, читаемая компьютером и содержащая данные, представляющие гравитационные градиенты, при том, что указанные данные генерируют путем: транспортирования гравитационного градиента транспортным средством, воспринимающим ускорения и перемещения, поглощение на ступени грубой обработки указанных ускорений и перемещений выше первой граничной частоты пропускания, поглощение на ступени тонкой обработки указанных ускорений и перемещений выше второй граничной частоты пропускания, при том, что ускорения и перемещения выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций; и измерение гравитационных градиентов гравитационным градиометром в момент поглощения ступенями грубой и тонкой обработки паразитных ускорений и перемещений.
Еще одним объектом изобретения является летательный аппарат, генерирующий данные, эквивалентные измерениям гравитационного градиента, включающий: блок ступени грубой фильтрации, предназначенный для поглощения перемещений выше первой граничной частоты пропускания и установленный на летательном аппарате, блок ступени тонкой фильтрации, предназначенный для поглощения вибраций выше второй граничной частоты пропускания, при том, что вибрации выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций, при том, что блок ступени тонкой фильтрации смонтирован на блоке ступени грубой фильтрации; а гравитационный градиометр смонтирован на блоке ступени тонкой фильтрации.
Еще одним объектом изобретения является тело, вызывающее гравитационный градиент и идентифицируемое: транспортированием гравитационного градиометра в транспортном средстве, воспринимающим ускорения и перемещения относительно прямой, одного уровня траектории, проходимой с постоянной скоростью относительно указанного тела, поглощением ускорений и перемещений ступенью грубой обработки выше первой граничной частоты пропускания, поглощением ускорений и перемещений ступенью тонкой обработки выше второй граничной частоты пропускания, при том, что ускорения и перемещения выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций, отслеживанием положения подвижного транспортного средства, измерением гравитационных градиентов с использованием гравитационного градиометра в момент поглощения паразитных вибраций и перемещений; и табулированием указанных гравитационных градиентов в функции положения подвижного транспортного средства.
Тело является, по крайней мере одним из ряда: минеральный депозит, полость, заполненная газом, полость, заполненная жидкостью, туннель, пещера или выемка, пористая среда, заполненная газом, пористая среда, заполненная жидкостью, и необычное тело, выделяющееся своими свойствами. Другие возможные объекты и особенности настоящего изобретения становятся очевидными для специалиста в описываемой области после ознакомления с последующим описанием конкретных исполнений изобретения со ссылками на прилагаемые чертежи.
Прилагаемые чертежи иллюстрируют настоящее изобретение только в качестве примеров его конкретного исполнения.
Фиг.1 представляет схематический перспективный вид устройства гравитационного градиометра, включающего особенности настоящего изобретения;
Фиг.1 А представляет перспективный вид траекторий движения частей устройства, показанного на Фиг.1;
Фиг.1В - диаграмма, иллюстрирующая один из возможных вариантов предполагаемых характеристик действия фильтрации для модели устройства фильтрации, показанного на Фиг.1;
Фиг.2 - схематический поперечный разрез части блока фильтрации устройства, представленного на Фиг.1 в сечении 2-2;
Фиг.3 - боковой схематический перспективный вид устройства, показанного на Фиг.2;
Фиг.4 - перспективный схематический вид в плане устройства, показанного на Фиг.3;
Фиг.5 и 5А-5Е - детализированные схемы устройства фильтрации тонких перемещений, смонтированном на блоке фильтрации, показанном на Фиг.2, 3 и 4;
Фиг.5F - схематическое изображение датчика, определяющего положение, являющегося частью устройства, показанного на Фиг.5;
Фиг.6 - схематическое изображение гравитационного градиометра, размещенного внутри устройства управления тонкими перемещениями, показанного на Фиг.5;
Фиг.6А - схематический вид сбоку части гравитационного градиометра, показанного на Фиг.6;
Фиг.6В - схематический вид в плане части гравитационного градиометра, показанного на Фиг.6;
Фиг.7 - стилизованное изображение схемы получения сигнала от гравитационного градиента, измеренного гравитационным градиометром, основанным на принципе простой балансировочной балки;
Фиг.8 - графическое представление процесса искажения положения гибкой связи в виде эластичного волокна под действием поступательных ускорений;
Фиг.9 - стилизованное изображение градиометра, основанного на принципе балансировочной балки.
Обращаясь к Фиг.7 авторы настоящего изобретения обращают внимание, что в идеальном случае центр масс каждого противовеса 1102 в гравитационном градиометре со скрещенными противовесами будет точно совпадать с центром вращения. Это вращение имеет место вокруг гибкой связи, которая при необходимости может быть выполнена в виде волокна, соединяющего противовес с его точкой подвеса на приборе. В этом случае волокно служит также в роли пружины вращения. Подобная конструкция описана в патентах США №5804722, 5505055 и 5668315, выданных на имя Ван Канна.
Привлекательность этой идеи заключается в возможности, по крайней мере в идеальном представлении, противодействовать поступательным и угловым ускорениям. При условии совпадения центра масс каждого стержня 1102 с центром вращения, исключая воздействие эффектов второго порядка, градиометры будут иметь некоторый уровень нежелательного отклика по отношению к поступательным ускорениям. Настоящее изобретение, в частности представляющее способ измерений и устройства, его реализующие, в некоторой степени, переносит эти нежелательные отклики на все типы ускорений, связанных с изобретением.
Фиг.1 иллюстрирует устройство измерения гравитационного градиента 100. Устройство 100 представляет подвижное транспортное средство или летательный аппарат 106, показанный в качестве примера как самолет 106, гравитационный градиометр и блок двухступенчатой фильтрации с активным управлением, конструктивно приспособленный для монтажа гравитационного градиометра и установки всей системы на самолете. Идеальной траекторией полета летательного аппарата 106 над поверхностью пересеченной местности 102, а более конкретно, идеальным перемещением гравитационного градиометра, установленного на летательном аппарате 106 для произведения измерений, является траектория 104. Идеальная траектория 104 находится на постоянном отдалении от центра Земли (или на постоянной высоте) и на переменной высоте 110 над поверхностью Земли 102 вследствие неравномерности последней.
Фиг.1 А снова иллюстрирует идеальную траекторию полета 104. Являясь идеальной траекторией несущей конструкции летательного аппарата 106, она является в большей степени идеальной траекторией точки отсчета гравитационного радиометра, установленного на борту летательного аппарата. Для соблюдения условия идеальности для траектории полета 104 гравитационный градиометр должен перемещаться по траектории 104 с постоянной скоростью.
Однако в реальных условиях работы и при обычных атмосферных условиях точка отсчета летательного аппарата 106 будет перемещаться вдоль траектории подобной 120. Более значимым является то, что точка отсчета гравитационного градиометра при отсутствии системы фильтрации или при ее отключении (в результате установки гравитационного градиометра относительно летательного аппарата 106) будет следовать траектории 120 или ей подобной до тех пор, пока не будут предприняты шаги для обеспечения дополнительного управления летательным аппаратом. Летательный аппарат будет следовать траектории 120 под управлением пилота или штатной системы автопилота с существенными отклонениями от идеальной траектории 104.
При этом, двигаясь вдоль траектории 120, гравитационный градиометр (или его точка отсчета) будет испытывать значительные нежелательные ускорения, которые значительно снизят отношение сигнал-шум прибора, уменьшая, таким образом, разрешение и точность прибора.
В результате исследований было обнаружено, что если будет разработан блок фильтрации применительно к характеристикам летательного аппарата 106, его поведению в обычных условиях штатных исследований и к характеристикам гравитационного градиометра, то при установке такого блока фильтрации между конструкциями летательного аппарата и гравитационным градиометром, он обеспечивает движение точки отсчета гравитационного градиометра по более сглаженной траектории 130 (далее траектории полета гравитационного градиометра 130). Было обнаружено, что ускорения, воздействующие на гравитационный градиометр, при его движении вдоль траектории гравитационного градиомегра 130 становятся приемлемо малы и не в состоянии влиять на высокую разрешающую способность гравитационного градиометра выдавать результаты измерений гравитационных градиентов.
Легко можно заметить, что летательный аппарат 106 может быть альтернативно заменен на наземное транспортное средство (например, грузовик, автомобиль и т.д.) или на морское транспортное средство (например, подводную лодку, корабль или судно с возможностью погружения). В таких альтернативных примерах применения действительная траектория движения 120 и идеальная траектория 104 соответствуют действительной и идеальной трехмерной траектории движения такого транспортного средства. Траекторией движения гравитационного градиометра 130 также будет трехмерная траектория перемещения гравитационного градиометра, установленного в таких альтернативных транспортных средствах. Безусловно, что различные виды гравитационных градиометров также могут быть применены в настоящем изобретении. Кроме этого, каждое конкретное исполнение предусматривает соответствие используемого в нем устройства фильтрации характеристикам транспортного средства/аппарата, среде, в которой он действует, и типу гравитационного градиометра, который в нем использован.
Летательным аппаратом 106 может быть любое воздушное транспортное средство, способное к полетам в атмосфере, таким как самолет, вертолет, глиссер, воздушный шар или дирижабль. Тем не менее, внимание было сосредоточено на хорошо известном двухмоторном самолете Де Хэвилланд Твин Оттер (также известном как DHC-6), для которого собрано наибольшее количество данных и который имеет относительно устойчивую полетную платформу с низкими скоростями полета около 100-150 узлов. Однако выбор DHC-6 для иллюстрации наиболее предпочтительного исполнения был сделан по причинам удобства, доступности и надежности. Другой летательный аппарат, способный выполнять описанные операции, в равной степени мог быть также использован.
Описание настоящего изобретения построено со ссылками на систему осей. Описываемая система осей аналогична традиционно используемым в динамике полетов с точкой отсчета, расположенной в центре тяжести (ЦТ) летательного аппарата 106 в сочетании с полезной нагрузкой, при том, что плоскость x-z является вертикальной плоскостью симметрии летательного аппарата 106 с осью х, указывающей направление движения, и осью z, направленной вниз. Такая ориентация осей х и z определяет направление оси у вправо, если смотреть из центра тяжести в направлении носа летательного аппарата 106.
Летательный аппарат 106 включает навигационную систему 108, которая включает и традиционную навигационную систему инерциального действия (ИНС) 112, и традиционную систему глобального позиционирования (ГПС) 114, приспособленные для выполнения функций применительно к настоящему изобретению. Точность действия ГПС 114 может быть повышена за счет выборочного использования наземного маяка 116 в совокупности с использованием дифференциальной ГПС (ДГПС). Навигационная система 108 обеспечивает выдачу данных, фиксирующих путь полета, которые, при использовании в совокупности с результатами измерений гравитационного градиента, получаемых системой 100, обеспечивают снятие точной карты гравитационных градиентов выбранного участка местности 102.
Как было сказано выше, атмосферные неравномерности являются причиной того, что летательный аппарат 106 не в состоянии выдерживать идеальный уровень траектории полета 104 с постоянной скоростью. В результате летательный аппарат 106 будет испытывать ускорения во всех направлениях. Следовательно, гравитационный градиометр, установленный на борту летательного аппарата 106, также будет испытывать эти ускорения, что в значительной степени отрицательно повлияет на результаты измерений гравитационного градиометра. По результатам проведенных измерений самолет типа Твин Оттер, следуя на высоте 150 метров со скоростью 150 узлов в среде турбулентности, вызываемой ветром в 20 узлов, будет испытывать вертикальное среднеквадратичное ускорение (или "подпрыгивание") порядка 0,1 g. Чаще, эти ускорения становятся результатом смещений летательного аппарата от идеальной траектории полета 104 так, что траектория полета имеет порядок случайных отклонений вида траектории 120.
Использование гравитационного градиометра типа, например, описанного Ван Канном в американских патентах 5804722, 5505055 и 5668315 и установленного на летательном аппарате без системы фильтрации, вызовет в описанных условиях случайный сигнал, превышающий уровень 10 Ио в течение 50% времени и превышающий уровень 110 Ио в течение 1% времени полета. При этом обычное рудное тело емкостью в 30 мегатонн, залегающее в 1 км от поверхности Земли, выдает сигнал только порядка 1 Ио. Естественно, что сигнал уровня порядка 1 Ио будет потерян или отсечен шумами, вызываемыми случайными сигналами. Несмотря на то, что критике подвергнута система Ван Канна, гравитационные градиометры других типов при тех же условиях их эксплуатации будут страдать от тех же нежелательных шумовых эффектов в той или другой степени.
Как было описано выше, традиционный летательный аппарат при исследовании традиционных поверхностей с классом измерений, обычным для географической съемки, и управляемый пилотом или обычным автопилотом имеет траектории полета 120, отличающиеся от идеальной траектории 104. При обычной небольшой высоте полета во время съемки и при обычных уровнях атмосферного ветра и условий турбулентности разница между траекториями 120 и 104 может достигать нескольких метров. И это даже при том, что пилот (человек или автомат) использует наиболее оптимальную стратегию подавления помех.
Принципиально возможно снизить разницу между траекториями 104 и 120 до относительно небольших величин путем конструкционных усложнений летательного аппарата и систем управления его полетом в качестве дополнения к системе фильтрации 206, и дополнения к летательному аппарату безусловно предпочтительны, но не обязательны при использовании системы 100. Система 100, соответствующая настоящему изобретению, в состоянии с достаточной эффективностью выдавать приемлемые данные гравитационного градиента, несмотря на значительные отклонения от траектории полета летательного аппарата 106.
Как описывалось выше, предполагаемая идеальная траектория движения гравитационного градиометра соответствует постоянной скорости на траектории 104, подразумевая при этом нулевые возмущения, нулевое ускорение и нулевую погрешность гравитационного градиометра, вызываемую ускорениями. Если бы гравитационный градиометр имел возможность бесконтактной подвески по типу магнитной подвески с активным управлением, то можно было бы обеспечить условия его следования исключительно по траектории 104 при условии, что будет обеспечено достаточное пространство внутри летательного аппарата для таких бесконтактных перемещений.
Однако перемещения летательного аппарата могут превышать пространство для возможного указанного инерциального перемещения на несколько метров, и ни один из летательных аппаратов, обычно используемых для целей аэросъемки или выполнения аналогичных функций, не имеет кабин, достаточных для обеспечения таких значительных перемещений гравитационных систем градиометрии с бесконтактной подвеской. Частые тяжелые контакты блока грвитационого градиометра с элементами конструкции летательного аппарата были бы нежелательны. При возникновении такого контакта гравитационный градиометр будет испытывать значительные нежелательные ускорения, вызывающие неприемлемые погрешности сигнала гравитационного градиометра. Таким образом, свободно парящий гравитационный градиометр представляет идеальное решение, но практически нереализуемое.
Противоположным бесконтактной подвеске гравитационного градиометра является его жесткое крепление к конструкционным элементам летательного аппарата 106 (или, что является более предпочтительным, закрепить его жестко с ротационной и вибрационной изоляцией). Однако в этом случае гравитационный градиометр испытывает все ускорения летательного аппарата и погрешность измерений в этом случае, как отмечалось ранее, может достигать уровня 110 Ио. И поскольку целевой уровень шума градиометра составляет 1 Ио, крепление гравитационного градиометра к летательному аппарату не может быть решением проблемы.
Разработана система для снижения погрешностей измерений гравитационного градиометра, вызванных ускорениями, до приемлемого уровня, снижающая одновременно вероятность возникновения соударений гравитационного градиометра в момент его контактов с конструкционными элементами. Ни жесткое крепление гравитационного градиометра к летательному аппарату, ни его свободная бесконтактная подвеска внутри летательного аппарата не могут достигнуть предполагаемого результата. Настоящее изобретение, тем не менее, предполагает особенности монтажа, находящиеся между двумя экстремальными решениями жесткой и свободной подвески. Предполагается, что гравитационный градиометр имеет с конструкционными элементами летательного аппарата слабую или пренебрежимо малую связь, используя блок активной фильтрации перемещений, представляющий два раздельных элемента.
Разработанный блок фильтрации учитывает спектр характеристик атмосферной турбулентности и типичные характеристики отклика летательного аппарата, используемого для аэросъемок (например, Твин Оттер) на скоростях, обычных для такого рода операций.
Исследования отклика летательного аппарата на атмосферную турбулентность выявили следующее. На низкой частоте (порядка ниже 0,1 Гц) ускорения составляют небольшую величину. Однако перемещения велики (порядка 1 метра и более), поскольку проходит обычно много времени пока действует ускорение одного направления. Выше этой частоты ускорения имеют относительно большую величину при незначительных перемещениях (порядка нескольких миллиметров), поскольку эти ускорения действуют в течение коротких промежутков времени.
В результате, блок фильтрации требует: (1) приложения слабой центрирующей силы к гравитационному градиометру, действуя в противофазе низкочастотным воздействиям с большими перемещениями и предотвращая удары при остановках градиометра (например, за счет физических пределов пространства кабины), происходящих с низкой частотой повторяемости, и (2) действия в качестве активного механического фильтра, предотвращающего передачу вибраций летательного аппарата на гравитационный градиометр на более высоких частотах их действия.
Необходимо отметить, что в действительности необязательно уменьшать ускорения непосредственно до уровня измерений гравитационного градиометра, соответствующего целевому уровню 1 Ио, поскольку известны комбинации аналитических и калибровочных мер, связывающих ускорения и перемещения. Особенностями оснащения системы гравитационной градиометрии включает ограничение измерений составляющих ускорений частотой, достаточной для получения ощутимых поправок. Выход градиометра порядка 30 Ио по результатам линейных ускорений приемлем для корректировок с получением конечной ошибки в пределах 1 Ио.
Учитывая уменьшение усилиями пилота или автопилота или других систем, если необходимо, эффектов турбулентных перемещений, система фильтрации гравитационного градиометра 206 (Фиг.2) может быть размещена внутри кабины 220 летательного аппарата 106 для уменьшения нежелательных ускорений гравитационного градиометра 600 (описываемого далее со ссылками на Фиг.6) по мере того, как летательный аппарат 106 движется по траектории полета, соответствующей траектории 120. Кроме этого, как более подробно описывается ниже, система фильтрации 206 также обеспечивает легкое действие самоцентрирующей силы так, что используемый градиометр имеет возможность смещения с низкочастотным ускорением в направлении его исходного положения относительно конструкции летательного аппарата, а также предотвращает встречу с физическими ограничениями или "остановками" системы фильтрации 206. Таким образом, используя устройство фильтрации 206, гравитационный градиометр (или его точка отсчета) будет двигаться по траектории 130 и будет постоянно направляться к его исходному положению усилиями устройства фильтрации 206. Кроме этого, в некоторых конкретных исполнениях настоящего изобретения устройство фильтрации 206 гравитационного градиометра может иметь связь с навигационной системой (например, автопилотом). Такая связь может иметь возможность выдавать дополнительную информацию в навигационную систему от устройства фильтрации 206. Такая дополнительная информация может быть использована для уменьшения различия между траекториями 104 и 120.
На Фиг.2 устройство фильтрации 206 размещено внутри кабины 220, образованной фюзеляжем 202 летательного аппарата 106. Устройство фильтрации 206 включает блок ступени грубой фильтрации (далее БГФ) 224, жестко закрепленный на полу кабины 204, ответственный за уменьшение ускорений инерционных перемещений, практически имеющих низкочастотный характер, предоставляя возможность гравитационному градиометру, размещаемому на борту летательного аппарата 106 (Фиг.1), свободу относительных перемещений. С БГФ 224 смонтирован блок ступени тонкой фильтрации (БТФ) 222, обеспечивающий уменьшение высокочастотных инерционных перемещений и ускорений гравитационного градиометра, включая привнесенные БГФ. С БТФ 222 смонтирован (как показано на Фиг.5) гравитационный градиометр 600.
Как показано выше, летательный аппарат 106 (Фиг.1) будет следовать по не идеальной траектории полета 120 вследствие аэродинамических сил, обусловленных условиями окружающей среды (например, порывами ветра и т.д.). Эти аэродинамические силы являются причиной возникновения ускорений летательного аппарата порядка среднеквадратической величины 0,1 g. Пиковые значения ускорений спектра воздействия повторяются с частотой около 0,1 Гц. При преобразовании спектра ускорений в спектр перемещений (посредством двойного интегрирования) отмечено, что результатом преобразования является сдвиг пиковых значений в спектре перемещений в область более низких частот повторяемости.
Физический смысл этого явления заключается в том, что большие перемещения, способные приводить гравитационный градиометр к столкновениям с ограничениями, обусловленными физическими размерами летательного аппарата, возникают с низкой частотой. Перемещения летательного аппарата такого рода возникают благодаря ускорениям, имеющим низкую частоту повторяемости в общем спектре. Так как перемещение меньше соизмерений фюзеляжа летательного аппарата, становится возможным использование платформы ступени грубой фильтрации для следования траектории, очень близкой к идеальной 104. При отклонении летательного аппарата от идеальной траектории на расстояния, большие внутренних размеров фюзеляжа, ступень грубой фильтрации должна будет приложить к платформе силу для ее перемещения вместе с чувствительным элементом прибора в направлении к центральной линии для предотвращения ударов прибора о стенки летательного аппарата, его пол или потолок. Такая восстановительная процедура будет включать только низкие частоты, ниже 0,1 Гц или ниже, а продолжающие воздействовать ускорения будут иметь достаточно малы, чтобы вносить существенные погрешности измерений, которые нельзя было бы откорректировать.
Дальнейший анализ обычного поведения летательного аппарата показал, что низкочастотные возмущения (или возмущения ниже 0,1 Гц в примере конкретного применения) характеризуются относительно низкими среднеквадратическими уровнями ускорений (порядка 0,2 м/с2 в вертикальном и ниже в горизонтальных направлениях), что выражается в относительно большой амплитуде перемещений летательного аппарата от идеальной траектории, а высокочастотные возмущения (вибрации) характеризуются относительно большими ускорениями, но перемещениями с небольшими амплитудами. Ступень тонкой фильтрации может защитить градиометр от высокочастотных ускорений.
Учитывая такую двойственность частотного режима, БГФ 224 был разработан для компенсации отклонений летательного аппарата, повторяющихся с низкой частотой и имеющих большую амплитуду. БГФ 224 также уменьшает возможность градиометра и удерживающей его конструкции от достижения пределов перемещений внутри кабины летательного аппарата 106. Однако до некоторой степени БГФ 224 будет передавать и усиливать некоторые составляющие перемещений высокочастотного диапазона, позволяя им воздействовать на базу (226) второй ступени. Уменьшение воздействия этих эффектов высокочастотных вибраций па гравитационный градиометр 600 или их фильтрацию обеспечивает БТФ 222. Фиг.1В иллюстрирует функцию передачи объединенной системы фильтрации, включающей оба БГФ 224 и БТФ 222 для обоих направлений х и z. В результате комплексного взаимодействия БГФ 224 и БТФ 222 и при возможном, но не обязательном, улучшении рабочих характеристик выбранной системы управления полетом и за счет корректировки выявленных погрешностей, вызванных ускорениями, гравитационный градиометр 600 будет испытывать погрешности, вызванные ускорениями, близкие к нулю, и не будет испытывать ударов при встрече с физическими ограничениями своих перемещений, обусловленных кабиной летательного аппарата 106. Таким образом, признание факта раздельного влияния частотных режимов, выраженного в создании двухступенчатой системы фильтрации, имеющей высокочастотную и низкочастотную системы активного контроля раздельного действия, каждая из которых действует раздельно (и во взаимодействии), обеспечило в результате получение системы 100, обеспечивающей приемлемую траекторию движения 130 для гравитационного градиометра 600.
Как показано на Фиг.2 (вид спереди), Фиг.3 (вид сбоку) и Фиг.4 (вид сверху) БГФ 224 три раздельные ступени-перемещении - ступень х-перемещений 216, ступень у-перемещений 218 и ступень z-перемещений 208 - каждая из которых принадлежит соответствующим ортогональным осям х, у и z. Ступень 208 z-перемещений соединена с со ступенью 218 у-перемещений, которая, в свою очередь, соединена со ступенью 216 х-перемещении. Каждая ступень перемещений 216, 218 и 208 действуют независимо, обеспечивая три степени свободы (3 СС). Каждая из ступеней имеет аналогичную конструкцию и обеспечивает, в случае летательного аппарата, перемещение примерно в 50 см (т.е. Хmax, Уmax и Zmax составляют примерно ±25 см). Несмотря на то, что в качестве преимущественного исполнения рассматривается система с 3 СС, использование систем с 1 СС и 2 СС также предусматривается.
Ступень z-перемещений 208, показанная с большими подробностями на Фиг.2, включает четыре параллельных направляющих 212А, 212В (обобщенно 212) с низким коэффициентом трения, вертикально смонтированные на раме 214, параллельно оси z. Опорная платформа 226 смонтирована с возможностью перемещения относительно направляющих 212, обеспечивая место для монтажа полезной нагрузки, которой, в данном случае, является БТФ 222. Опорная платформа 226 имеет свободу перемещений в направлении оси z. На раме 214 также смонтированы линейные двигатели 120А, 210В, 210С, 210D (обобщенно 210), обеспечивающие подвижность опорной платформы 226. Пример преимущественного исполнения предусматривает 4 двигателя, размещенных по вертикали, каждый в своем углу, обеспечивая симметрию вертикальных нагрузок, снижая этим возмущения. Акселерометры 228, смонтированные на опорной платформе 226, измеряют ускорения платформы 226. Ускорения, измеренные акселерометрами 228 платформы 226 (по отношению к неподвижному пространству), генерируют сигналы, поступающие в систему 230 z-управления через подвесной кабель 232. Система 230 z-управления смонтирована на раме 214. Из вышесказанного ясно, что полезной нагрузкой для панели 208 z-перемещений является платформа 226 (с гравитационным градиометром, установленным на ней).
Ступень у-перемещений 218, наиболее подробно показанная на Фиг.4, включает две параллельные направляющие с низким коэффициентом трения 406А, 406В (обобщенно 406), горизонтально смонтированные с рамой 404, параллельной оси у. Направляющие 406 имеют конструкцию, аналогичную направляющим 212. Рама 214 ступени 208 z-перемещений смонтирована с возможностью перемещений относительно направляющих 406, позволяя ступени z-перемещений 208 двигаться параллельно оси у. На раме 404 также смонтирован линейный двигатель 408, обеспечивающий подвижность ступени 208 z-перемещений. Акселерометры 410, смонтированные на ступени 208 z-перемещений, измеряют ускорения ступени z-перемещений 208 в направлении у. Ускорения, измеренные акселерометрами 410 ступени z-перемещений 208 (относительно неподвижного пространства), генерируют сигналы, поступающие в систему у-управления 412 через подвесной кабель 414. Система у-управления 412 смонтирована на раме 404. Полезной нагрузкой для ступени у-перемещений 218 является ступень z-перемещений 208 и полезная нагрузка, имеющая связь со ступенью z-перемещений 208.
Ступень х-перемещений 216, наиболее подробно показанная на Фиг.3 и Фиг.4, также включает две параллельные направляющие с низким коэффициентом трения 302А, 302В (обобщенно направляющие 302), горизонтально смонтированные на раме 304, параллельной оси х. Рама 306 жестко смонтирована на полу кабины 204 традиционными средствами крепления, такими, как например, болты. Конструкция направляющих 302 аналогична направляющим 212 и 406. Рама 404 ступени у-перемещений 218 смонтирована с возможностью перемещения относительно направляющих 302, обеспечивая движение ступени у-перемещений 218 параллельно оси х. На раме 304 также смонтирован линейный двигатель 402, обеспечивающий подвижность ступени у-перемещений 218. Акселерометры 416, смонтированные на ступени у-перемещений 218, измеряют ускорения ступени у-перемещений 218 (относительно неподвижного пространства) в направлении х. Ускорения, измеренные акселерометрами 416 ступени у-перемещений 218, вырабатывают сигналы, поступающие в систему х-управления 420 через подвесной кабель 418. Система х-управления 420 смонтирована на раме 304. Полезной нагрузкой ступени х-перемещений 216 является ступень у-перемещений 218 (и связанная с ней полезная нагрузка - ступень z-перемещений 208 и платформа 226).
Как будет более подробно изложено далее, акселерометры 416 (измеряющие ускорения по оси х), 410 (измеряющие ускорения по оси у) и 228 (измеряющие ускорения по оси z) должны быть подобраны таким образом, чтобы они могли обеспечивать точность измерений, по крайней мере, до 0,001 м/с2. Также, линейные двигатели 402 (для создания движущих сил в направлении оси х), 408 (для создания движущих сил в направлении оси у) и 210 (для создания движущих сил в направлении оси z) должны быть способны обеспечивать достаточные усилия для описываемого приложения.
Контроллеры 420, 412 и 230 БГФ разработаны таким образом, чтобы компенсировать любые обнаруживаемые низкочастотные ускорения, а также, чтобы компенсировать любые помехи в системе, появляющиеся в результате трения между направляющими и полезной нагрузкой, смонтированной на них, и сил, воздействующих от влияния подвесного кабеля. Например, подвесной кабель 232 соединяет платформу 226 с системой управления 230, которая смонтирована на раме 214. При движении платформы 226 в направлении z (т.е. вверх или вниз) подвесной кабель 232 также будет двигаться. Такое движение подвесного кабеля 232 вызывает реактивную силу на платформе 226, которая требует компенсации. Компенсацию этого эффекта обеспечивает контроллер z-направления. Аналогичные схемы компенсации обеспечивают системы управления 412 и 420 (Фиг.4). Кроме этого, контроллеры 420, 412 и 230 могут быть использованы для определения положения БТФ 222 относительно летательного аппарата 106. В качестве дополнительной функции, контроллеры 420, 412 и 230, используя результат определения положения БТФ 222 относительно летательного аппарата 106, способны оказывать необходимое легкое восстанавливающее воздействие, требуемое для предотвращения, в большинстве случаев, встречи БТФ 222 с пределами подвижности БГФ 224. Как показано более подробно далее при описании примеров преимущественного исполнения, контроллеры используют в своем алгоритме управления в равной степени как данные положения, так и ускорения.
При необходимости может быть использована беспроводная связь между различными ступенями для уменьшения размеров подвесных электрических линий, позволяя внести усовершенствования в схему алгоритмов управления. Кроме этого, для специалиста в описываемой области понятно, что описывая три независимых системы управления 230, 412 и 420, каждый из независимых алгоритмов управления может работать в приборе центральной обработки данных и управления. В качестве одного из преимущественных исполнений возможна обратная связь контроллеров БТФ с контроллерами БГФ.
Система, аналогичная БГФ 224, описана в публикации Канадского Космического Агентства 1993 г. "Разработка и функционирование блока фильтрации вибраций больших перемещений в трех степенях свободы для системы КС-135" под авторством Триггвасон Б.В. и др.
В результате оснащения платформы 226 ступенями z-перемещений 208, у-перемещений 218 и х-перемещений 216, платформа 226 приобретает возможность перемещаться независимо в каждом из трех ортогональных направлений. Кроме этого, поскольку каждая из панелей направления 216, 218 и 208 имеет независимое управление, платформа 226 обладает тремя степенями свободы.
В действии БГФ 224 обеспечивает компенсацию низкочастотных ускорений и соответствующих перемещений большой амплитуды, полезной нагрузки (БТФ 222) таким образом, что БТФ 222 (или, что возможно более точно, точки отсчета гравитационного градиометра) будет совершать движение по траектории 130 (Фиг.1А). Это достигается приложением слабой восстанавливающей силы путем активации БГФ 224 для предотвращения встречи БТФ 222 с пределами движения БГФ 224 в пределах кабины. Например, поскольку разница между траекторией 120 (траекторией конструкции летательного аппарата относительно свободного пространства) и траекторией 130 - траекторией полезной нагрузки (БТФ 222), несомой БГФ 224, не превышает максимально возможного перемещения полезной нагрузки относительно БГФ 224, полезная нагрузка не будет контактировать с пределами подвижности и предотвратит любые связанные с этим нежелательные ускорения.
Как описывалось выше, низкочастотные ускорения обычно являются результатом перемещений летательного аппарата 106 с относительно большими амплитудами (Фиг.1). Эти низкочастотные ускорения измеряют акселерометрами 228, 410, 416 ступеней z-перемещений 208, у-перемещений 218 и х-перемещений 216, соответственно, а компенсацию осуществляют командой системы управления на линейные двигатели ступеней перемещения БГФ 224.
Например, низкочастотные перемещения, обнаруживаемые датчиками положения 574, выражаются в сигналах, передаваемых на систему z-управления 230 через подвесной z кабель 232. Система z-управления 230 через, например, традиционную схему управления Пропорция, Интеграл, Производная (ПИП) определяет параметры сигнала управления, требуемого для компенсации z-перемещений летательного аппарата 106 (т.е. относительный контроль положения). Полученный сигнал управления передают затем на линейный двигатель 210, прикладывающий усилие к платформе 226 в z-направлении для противодействия перемещениям, имеющим место за счет ускорений летательного аппарата в z-направлении и соответствующим перемещениям относительно свободного пространства. Кроме этого, акселерометры 228 используют для выработки сил действия на ступень z-перемещений (платформу 226) для уменьшения влияния ускорений на платформу. Эти силы управления обычно действуют для повышения эффективной инерционности системы. Такую схему управления, использующую закон управления ПИП для относительного положения, совмещая его с другим законом управления ПИ, основанном на ускорении, называют Дуальным ПИП (ДПИП) контроллером. Аналогичную компенсацию ускорений в х-направлении и у-направлении, определяемых акселерометрами 410, 416, проводят с помощью систем управления 412, 420 при участии линейных двигателей 408, 402 панели у-перемещений 218 и панели х-перемещений 216, соответственно. ДПИП контроллер не является единственно возможной альтернативой указанного использования из ряда таких, как Н2, Hinf, или мульти-вход-мульти-выход (МВМВ).
Как указывалось, БГФ 224 обеспечивает для низкочастотных воздействий "восстанавливающую силу" небольшой амплитуды, используемую для оказания небольшого усилия на каждую ступень перемещений 216, 218, 208 в направлении первоначального или исходного положения, измеряемого относительно летательного аппарата 106. Соответственно, эту восстанавливающую силу оказывают через систему управления относительным положением. Как описывалось выше, каждая ступень перемещений (т.е. ступень х-перемещений 216, ступень у-перемещений 218 и ступень z-перемещений 208) способна перемещать свою полезную нагрузку на максимальное расстояние (±xmax, ymax и ±zmax соответственно) от исходного положения. Это максимальное расстояние является функцией БГФ 224 (размеры которого, как правило, определены размерами кабины 220 летательного аппарата 106 (Фиг.2). При отсутствии восстанавливающей силы ступень перемещений, время от времени, будет достигать своего предела по возможности перемещения и будет "натыкаться" на ограничения подвижности БГФ 224. Такое сталкивание с ограничениями подвижности скажется в относительно больших ускорениях, воздействующих на соответствующую ступень БГФ, воздействуя непосредственно на полезную нагрузку, закрепленную на платформе 226 БГФ 224.
Например, предполагая, что в отсутствие восстанавливающей силы ступень z-перемещепий 208 позволила платформе 226 подскочить до потолка кабины 220 летательного аппарата 106, достигая тем самым пределов своего возможного перемещения (т.е. платформа 226 переместилась на расстояние - Zmax от исходного положения). Контакт с ограничением возможности перемещения вызовет ударное воздействие на ступень перемещения с очень высоким ускорением (порядка 1g или более). В результате платформа 226 (а, значит, и ее полезная нагрузка в виде гравитационного градиометра) будет испытывать значительные ускорения, т.к. полезная нагрузка также испытает серьезный удар о пределы ступени 208. Эксперименты показали, что результирующая погрешность сигнала (е) может на два или три порядка превышать значение измеряемого градиента.
Погрешность такого рода абсолютно неприемлема. Соответственно, в целях компенсации ситуации (т.е. когда ступень перемещения позволяет своей полезной нагрузке достигать физических пределов подвижности) каждая система управления (т.е. 230, 412, 420) имеет возможность воздействия на соответствующую ступень перемещений слабой восстанавливающей силой для плавного перемещения соответствующей ступени обратно в исходное положение относительно летательного аппарата.
Важно отметить, что несмотря на наличие низкоамплитудного и низкочастотного "восстанавливающего" ускорения, последнее не дает существенной погрешности измерений гравитационного градиометра и, кроме этого, эта погрешность может быть откорректирована.
Каждый конкретный гравитационный градиометр будет иметь свои особенные характеристики, включая функцию погрешности. Оценку сигнала погрешности (в Ио) гравитационного градиометра 600 (описываемого ниже со ссылками на Фиг.6 и Фиг.6А) можно произвести, используя уравнение (1).
e=500(Ио/м2/c4)axaz Ур-е(1)
(ах и az ускорения в м/с2 в направлении х и z, соответственно).
Вследствие конструктивных особенностей гравитационного градиометра 600, точка подвески/планарное волокно (расположенное своей удлиненной стороной, параллельной оси х, вдоль плоскости y-z) деформируется в соответствии со своей конструкцией и расчетом в виде S-образного изгиба (Фиг.8) под действием ускорений в х-направлении, оставаясь относительно свободной от деформаций под действием ускорений в z-направлении. В результате изгиба гравитационный градиометр 600 испытывает погрешность вращения своих стержней. Величина сигнала погрешности в соответствии с уравнением (1) является комплексным выражением, объединяющим влияние ускорений в х и z направлениях. Если ускорение в одном из этих направлений может быть уменьшено до нуля, то погрешность может быть эффективно уменьшена до пренебрежимо малой величины. Сигналы погрешности, получаемые в качестве произведения любой другой пары ускорений (например, аxау, ayaz), становятся пренебрежимыми благодаря конструкции градиометра 600.
Так как величина измеряемого градиента лежит в пределах 1 Ио, специалисту в данной области понятно, что сигнал погрешности, имеющей место в результате приложения восстанавливающей силы, должен быть меньше предполагаемой величины измерения (т.е. измеряемый сигнал должен быть больше любого шума). Как указывалось, эффекты влияния восстанавливающей силы и результирующего ускорения(ий) могут быть точно "изъяты" во время обработки данных. Однако с целью минимизации эффектов приложения восстанавливающей силы, погрешность от прилагаемой силы должна быть в пределах порядка измерения (т.е. меньше 1 Ио). Следовательно, предполагая результат измерения градиента в качестве верхнего предела уравнения (1), погрешность от приложения восстанавливающей силы должна быть меньше 1 Ио и, следовательно, удовлетворять следующее неравенство для результирующего ускорения:
500axaz<1 Ур-е(2)
ахаz<0,002 м2/с4 Ур-е(2.1)
Как указывалось выше, акселерометры 416 (измеряющие ускорения по оси х) должны обеспечивать точность измерения ускорения, по крайней мере, до 0,001 м/с2. Соответственно, акселерометры 416, 223 выбирались из расчета их точности до 0,001 м/с2. Линейные двигатели 402 (для обеспечения подвижности по оси х) и 210 (для обеспечения подвижности по оси z), контролируемые алгоритмами управления, вырабатывают восстанавливающие силы, сохраняя произведение соответствующих ускорений в пределах 0,002 м2/с4, величины, являющейся максимально разрешимой уравнением (2.1).
Определение восстанавливающей силы для регулирования относительного положения полезной нагрузки по отношению к летательному аппарату 106 с целью предотвращения встречи полезной нагрузки с физическими ограничениями подвижности ступени перемещения и для обеспечения ее положения наиболее близко к исходному или первоначальному положению по отношению к конструкции летательного аппарата осуществляют следующим образом. При определении величины восстанавливающей силы (Fcrel) для регулирования положения (относительно летательного аппарата 106) ступени у-перемещений 218, являющейся полезной нагрузкой ступени х-перемещений 216, применяют следующий алгоритм:
Fcrel=kpp·xrel+kpd·dxrel/dt+kpi·( xreldt) Ур-е (3)
xreldt) Ур-е (3)
где: kpp, kpd и kpi являются коэффициентами пропорции, производной и интеграла, соответственно, для управления относительного положения, a Xrel является значением относительного положения полезной нагрузки (т.е. ступени у-перемещения 218 относительно летательного аппарата 106).
Аналогично выглядят и алгоритмы положения полезной нагрузки и для направлений у и z.
Уравнение управления (3) является стандартным алгоритмом контроллера типа ПИП. Как описывается далее, оно образует одну из ветвей полного алгоритма управления Дуального ПИП (ДПИП). Коэффициент пропорциональности (жесткости) в уравнении (3) устанавливает граничную частоту пропускания ступени грубой фильтрации и, в более общем случае, вместе с коэффициентом производной (сглаживания), образует характеристики функции пропускания блока фильтрации. Коэффициент пропорциональности вырабатывает величину восстанавливающей силы, которая увеличивается по мере удаления полезной нагрузки от исходного положения. Величину этого коэффициента настраивают с целью уменьшения вероятности возможной встречи с физическими ограничениями подвижности до приемлемо низких величин. При необходимости может быть введен дополнительный нелинейный коэффициент жесткости, например, путем наложения дискретных условий, для уменьшения вероятности контакта с ограничениями подвижности ступени. Это может быть сделано несколькими способами.
Положение полезной нагрузки относительно конструкции выбранного летательного аппарата осуществляют датчиками перемещений большого хода. Могут быть использованы датчики различных типов.
Управление положением, осуществляемое системой х-управления 420, обеспечивает компенсацию низкочастотных ускорений летательного аппарата 106 в направлении х в системе относительных величин. Как показано выше, ступень х-перемещений 216 БГФ 224 включает акселерометры 416, которые измеряют абсолютную величину ускорения полезной нагрузки ступени х-перемещений 216 (т.е. ступени у-перемещений 218). В соответствии с этим, для более эффективной компенсации ускорений летательного аппарата 106 относительно свободного пространства в х-направлении прикладывают компенсационную силу (Fcabs-x) по отношению ступени у-неремещеиий 218 за счет действия участка управления ускорением системы х-управления 420. В х-направлении система управления ускорением определяет Fcgbs-x, выполняя эту операцию в примере преимущественного исполнения по следующему алгоритму:
Fcabs-x=kap·xabs+kad·dxabs/dt+kai(xabsdt)+kacc(d2xabs/dt2) Ур-е (4)
где kap, kad и kai представляют коэффициенты пропорциональности абсолютного положения, производной абсолютного положения и интеграла абсолютного положения, соответственно;
kace представляет коэффициент, прямо пропорциональный ускорению;
Xabs представляет положение после перемещения в х-направлении относительно свободного пространства; и
t - время.
Только ускорение относительно свободного пространства может быть измерено непосредственно. Следовательно, сигналы данных, соответствующих измеряемым ускорениям, используют для выработки оставшихся коэффициентов с применением численной интеграции в соответствии со следующим:
d2xabs/dt2acc
dxabs/dt=accdt
xabs= accdt
accdt
Аналогичные алгоритмы применяют в системе управления 420 для компенсации поступательных отклонений от траектории 104 в направлениях у и z.
Первые три коэффициента с правой стороны уравнения (4) соответствуют стандартному алгоритму контроллера ПИП, основанного на положении в свободном пространстве. Четвертый коэффициент, прямо пропорциональный измеряемому ускорению, может быть использован для эффективного увеличения массы в системе. Это уравнение управления представляет вторую ветвь Дуального ПИП (ДПИП) контроллера.
Результирующей сил, прикладываемых к БГФ 224, станет сумма восстанавливающей и компенсирующей сил, по уравнениям 3 и 4, соответственно, которая будет приблизительно соответствовать коэффициенту, равному единице, на низкой частоте воздействий. Ускорения пропускают через частотный фильтр перед использованием в уравнениях алгоритмов управления. Численные методы вычисления интегралов, указанных выше, выбирают, учитывая общие погрешности. Кроме этого, схемы корректировки погрешностей могут включать ограничение роста погрешности с точностью вычислительного устройства, используемого для численного вычисления вышеуказанных интегралов.
Как указывалось выше, каждая система управления БГФ 224 (т.е. системы управления 230, 412, 420) обеспечивает управление относительным положением полезной нагрузки относительно летательного аппарата 106. Управление положением предусматривает компенсацию отклонений летательного аппарата 106 от траектории полета 130.
Эффект использования полного алгоритма контроллера управления за счет использования комбинации обеих ветвей алгоритма управления по уравнениям (3) и (4) заключается в уменьшении ускорений, испытываемых полезной нагрузкой, управляя движением полезной нагрузки вдоль траектории 130 в то время, как летательный аппарат продолжает следовать по траектории 120. Значения всех коэффициентов алгоритма управления вычисляют единым контроллером для достижения искомой точности работы системы фильтрации. На низких частотах воздействия будут доминировать параметры относительного положения, обеспечивая искомую центрирующую силу, в то время, как на промежуточных частотах будут доминировать параметры свободного пространства, увеличивая эффективную массу и позволяя настраивать пропускающую функцию блоков фильтрации.
Такая ступень фильтрации была бы идеально достаточной. Однако размеры системы таковы, что создают свою собственную динамику, уменьшая степень ослабления помех на частотах, соответствующих частотам настройки БГФ. Влияние размеров системы накладывает ограничение на минимально возможную частоту настройки порядка 10 Гц. Кроме этого, БГФ в примере описываемого конкретного исполнения не имеет средств фильтрации ротационных воздействий. Воздействие этих колебаний ослабляет БТФ.
Как описано выше, БГФ 224 компенсирует колебания ускорений, т.е. перемещений, имеющих место, в частности, в режиме низкочастотных воздействий в диапазоне 0,1-0,5 Гц, стремящихся к увеличению амплитуд перемещений летательного аппарата 106 до сравнительно больших значений. Частоты, определяющие этот частотный режим, можно назвать "граничными" частотами. Следует отметить, что ослаблению, хоть и в меньшей степени, могут подвергнуться воздействия и на частотах вне указанного диапазона, однако, эти ослабления не рассматриваются в аспекте настоящего изобретения. БГФ 224 может также, за счет восстанавливающих сил, пытаться удерживать любую полезную нагрузку от встречи с физическими ограничениями ее подвижности относительно каждой панели перемещений и поддерживать ее положение, близкое к исходному или первоначальному, относительно летательного аппарата. Совместно с ним, БТФ 222 (проиллюстрированный на Фиг.5, 5A-5F) способен обеспечить уменьшение воздействий, имеющих место на относительно высоких частотах, т.е. колебаний, оказывающих воздействие на частотах выше 3 Гц и вырабатывающих перемещения летательного аппарата 106 с относительно малыми амплитудами.
Штатный автопилот способен уменьшить до некоторой степени ротационные перемещения летательного аппарата, вызванные атмосферными воздействиями, до, возможно, 1, 2 градусов (20 миллирадиан (мрад)). Преимущественным станет, безусловно, применение систем автоматического управления полетом с большими возможностями. Двадцать миллирадиан ротации является достаточно большой величиной. Ротационные грузы в гравитационном градиометре Ван Канна, например, ограничение диапазона перемещений до 0,11 градусов (2 мрад) на каждой из трех осей. Таким образом, штатный автопилот не в состоянии уменьшить в достаточной степени ротации самолета и, соответственно, фильтрация ротаций становится также необходимой. В примере преимущественного исполнения фильтрация ротаций гравитационного градиометра осуществляется за счет БТФ 222. На практике, относительное вращение, которое должна преодолеть комбинация БГФ 224 и БТФ 222, должно быть достаточной для реализации максимального режима в 1,2 градуса (20 мрад) несколько раз, чтобы существенно уменьшить вероятность встречи грузов гравитационного градиометра с физическими ограничениями их возможного вращения. Например, если БТФ 222 проворачивается на 5 градусов (80 мрад), то вероятность встречи с пределами вращения мала. Реальный диапазон возможной для преодоления комбинированной ротации БГФ и БТФ будет зависеть от конкретного летательного аппарата, режима управления полетом, уровней турбулентности атмосферы и использования средств удержания летательного аппарата от ухода с курсовых параметров.
В примере преимущественного исполнения, БТФ 222 имеет шесть степеней свободы (СС) и выполнен в виде элемента с бесконтактной подвеской или флоутера 502, парящего в магнитном поле над базой 504, которая установлена на платформе 226 БГФ 224 с возможностью снятия. Шесть степеней свободы позволяют перемещения в трех ортогональных осях (х, у и z) и вращения относительно трех ортогональных осей. Шесть комплектов магнитных генераторов, основанных на использовании силы Лоренца (МГ, также называемые актюаторами) 506(а), 506(b),...,506(f) (силовые генераторы 506, используемые в виде комплектов или индивидуально), устанавливают на БТФ 222, обеспечивая возможность управляемых перемещений в каждой из шести СС. Кроме этого, четыре подъемных актюатора (также известных как подъемные катушки) 507(а), 507(b), 507(с) и 507(d) имеют возможность оказывать подъемное усилие в 1 g для преодоления номинальной силы гравитации и, таким образом, позволяя использовать актюаторы 506 для плавной регулировки сил управления. Полезная нагрузка, представляющая в данном случае гравитационный градиометр 600, жестко крепится к верхней поверхности флоутера 502. При этом, очевидно, что аналогично могут быть смонтированы и другие блоки ступени тонкой фильтрации. Также не обязательным является использование магнитных сил в БТФ 222. Например, для более пассивной бесконтактной подвески блока тонкой фильтрации может быть использована пневматическая подвеска, имеющая, безусловно, отличающееся устройство и принцип действия.
Каждый генератор 506 БТФ 222 (показанный на Фиг.5А-5С) включает магниты 508 (редкоземельные магниты для достижения магнитного поля большой силы), жестко установленные на базе 504, и соответствующие электромагнитные катушки управления 510, жестко установленные на флоутере 502. Каждый силовой генератор имеет раздельное управление. Постоянные магниты 508 имеют преимущество перед электромагнитами 508, поскольку не требуют никакой электроэнергии (и связанной с ней необходимостью кабельного коммутирования). Однако постоянные магниты 508 могут быть заменены электромагнитами при использовании вместе с соответствующей системой управления, имеющей возможность компенсации сил, результирующих от влияния кабельного коммутирования для подачи электропитания или информационного обмена.
Катушка управления (или катушка-У) 510 более детально показана на Фиг.5С. Катушка управления, показанная в качестве примера применения, включает обмотку 530 и сердечник 532.
Взаимодействие магнитов 508 и катушек управления 510 обеспечивает достаточное усилие для эффективного гашения любого ускорения, измеряемого акселераторами 516 (описанными ниже). Подъемные катушки 507 используют для приложения устойчивой вертикальной нагрузки вверх или вниз на полезную нагрузку БТФ. Управление этой устойчивой нагрузкой осуществляют отдельным ПИП контроллером, использующим высокочувствительные сенсоры прилагаемой нагрузки. Эта вертикальная нагрузка превышает примерно на 95 вес.% полезной нагрузки. Актюаторы 506 обеспечат недостающую вертикальную составляющую силы в равной степени как и динамическое управление функцией фильтрации. В идеальных условиях полезная нагрузка свободна от ускорений относительно свободного пространства. Это позволяет считать, что суммарная сила, действующая на полезную нагрузку через контроллер, имеет, практически, постоянное значение, требуемое для противодействия силе гравитации. Отклонения от этого постоянного значения силы, требуемые актюаторами 506, возникают по двум причинам: малые нагрузки от ускорений, связанные с незначительно искривленной траекторией 130 гравитационного градиометра; и усилия, воздействующие на флоутер БТФ от подвесных линий. Усилиями системы управления летательньм аппаратом и фильтрации БГФ значение нагрузки удерживается в пределах малых величин. Низкочастотные ускорения имеют порядок 0,05 g, прикладывая нагрузки, требующие действия БТФ в пределах 5 вес.% полезной нагрузки. Актюаторы 506 позволяют сделать это. Нагрузка, прикладываемая подвесными линиями, зависит только от смещения флоутера БТФ от его исходного положения и от размерной доли базы, составляющей смещение флоутера в ее пределах. Поскольку подвесные линии имеют очень малую жесткость, их доля нагрузки составляет незначительную величину, с которой легко справляются актюаторы 506. При этом следует учитывать, что нагрузки не зависят от массы полезной нагрузки - градиометра 600, связанных с ним устройств и флоутера 502, иначе чем описано далее.
С БТФ также смонтированы три датчика положения и ориентации 520а, 520b, 520с (более подробно датчики положения (или ДОП) 520, установленных индивидуально или группами, показаны на Фиг.5F). Каждый датчик положения представляет собой световой датчик 514 с соответствующим светоизлучающим диодом (СИД) 512. Оптимально, световой датчик 514 монтируют на базе 504, а СИД на флоутере 502.
Световой датчик 514 способен определять положение светового пучка, излучаемого соответствующим ему СИД 512, по отношению к поверхности датчика. Как показано на Фиг.5F на примере исполнения, световой датчик 514 вырабатывает четыре тока (IA, IB, IC и ID), которые зависят от положения светового пучка от СИД 512 на поверхности ДОП. Положение светового пучка относительно датчика 514 может быть рассчитано как х=(IА-IВ)/(IА+IВ) и у=(IС-ID)/(IС+ID). В совокупности, параметры положения, вычисленные тремя датчиками положения 520, могут быть использованы для определения положения в шести СС (положения и ориентации) флоутера 502 относительно базы 504. Могут быть также использованы датчики и других типов для определения параметров положения в шести СС, например, датчики емкостного типа, датчики, использующие вихревые токи, или оптические датчики других видов и их комбинаторные сочетания.
Для измерения линейных и ротационных ускорений флоутера 502 относительно свободного пространства преимущественно используют шесть акселерометров 516a-f (акселерометры 516, работающие индивидуально или совокупно) или три акселерометра и три датчика скорости вращения, таких как пьезоэлектрические или гироскопы вращения. Акселерометры 516 должны отвечать требованиям измерения в достаточном диапазоне и обеспечения достаточной точности, требуемых алгоритмами управления, используемых в БГФ 224 (Фиг.1). Результаты измерений акселерометров 516 могут корректироваться, используя традиционную технику. В описываемом примере преимущественного исполнения акселерометры 516 (вместе с техникой корректирования) должны измерять ускорения в пределах, по крайней мере, 2 g в z-направлении и 0,5 g в х и у-направлениях. Предполагается, что этих пределов достаточно для большей части сред действия прибора. Кроме этого, каждый акселерометр 516 должен обеспечивать разрешение и абсолютную точность до 1 милли-g (около 0,01 м/с2) для всех рассматриваемых частот и лучше чем 0,1 милли-g (около 0,001 м/с) для частот от 0 до 0,1 Гц. Эти требования к параметрам находятся в пределах возможностей существующих видов акселерометров.
На Фиг.5 показана электрическая блок схема. В информационные и энергетические коммуникации связывают каждый из акселерометров 5-16 (акселерометры 516F на флоутере, акселерометры 516В на базе БТФ и акселерометры 516С на каждой ступени БГФ), устройства определения положения (УОП) 520 БТФ, датчики положения 574 БГФ, катушки управления 510 БТФ шести актюаторов управления 506, подъемные катушки 507 БТФ, линейные двигатели 210, 402 и 408 и плату процессора управления (ППУ) 558. ППУ 558 предназначена для приема сигналов данных от всех датчиков и для обработки данных, используя приемлемые алгоритмы (описываемые ниже со ссылками на Фиг.5Е). ППУ 558, ответственная за результаты обработки данных, контролирует и управляет работой катушек управления 510 и подъемных катушек 507 с тем, чтобы не допустить воздействия высокочастотных ускорений, а также контролирует и управляет работой линейных двигателей 210, 402 и 408.
ППУ 558 включает Процессор Цифрового Сигнала (ПЦС) (например, ПЦС типа TMS320C40 производства фирмы Тексас Инструменте, вычислительный процессор с ограниченным набором команд (1ШОНК) или им подобные). ППУ 558 взаимодействует с системной электроникой через Цифровую Плату Взаимодействия (ЦПВ), которая в свою очередь взаимодействует с модулями обработки сигнала и модулями управления выходным сигналом через несколько Модулей Взаимодействия Цифровой Связи (МВЦС) 572 (МВЦС 572F на флоутере БТФ, МВЦС 572В на базе БТФ и МВЦС 572С на каждой ступени БГФ). ППУ 558 имеет связь с вычислительной машиной типа персонального компьютера (ПК) через распределенную память со сдвоенным портом для обеспечения быстрой передачи данных между компьютерами. ПК взаимодействует со стандартными устройствами, подобными монитору, плате управления, мышке и приводу жесткого диска 552.
Обработку сигналов с акселерометров 516, УОП 520 и датчиков положения 574 БГФ осуществляют высокоскоростными модулями обработки сигналов с высоким разрешением типа Модуля Обработки Сигнала Акселерометра (МОСА) 576, включая МОСА 576F на флоутере БТФ, МОСА 576В на базе БТФ и МОСА 576С на каждой ступени БГФ. МОСА 576 включает приемлемые для данного приложения фильтры посторонних сигналов и аналого-цифровые преобразователи в равной степени, как и электронные средства поддержки связи через МВЦС 572. Сигналы управления от ППУ 558 поступают к различным актюаторам управления через ЦПВ 578, затем проходят через МВЦС 572 и через высокоскоростные аналого-цифровые преобразователи (Ц/Л) с высоким разрешением для воздействия на катушки управления 510, катушки подъема 507 и линейные двигатели 210, 402 и 408. В примере преимущественного исполнения присутствует, по крайней мере, два входа (один для ускорения и другой для тепловой компенсации) для каждого акселерометра 516 и шесть выходов (включая по одному для каждой катушки управления 510a-f шести силовых генераторов 506a-f, при том, что каждый актюатор имеет только одну катушку). ППУ 558 обладает способностью управления (например, передавая сигналы на или принимая с), по крайней мере, тридцати шести аналоговых каналов для управления БТФ 222.
Кроме этого, ППУ 558 имеет возможность принимать данные с гравитационного градиометра 600. ППУ 558 имеет способность также принимать и передавать сигналы (цифровые или аналоговые) с/на соответствующие части БТФ 222 с достаточной скоростью. Эксперименты показали, что для большей части предполагаемых средств воздушной доставки периодичность проведения исследования в 1000 запросов в секунду для каждого входного канала является достаточной, т.к. позволяет осуществлять точное сопровождение и управление с частотой до 100 Гц. Для каждого выходного канала частота сигналов управления примерно в 100 фрагментов в секунду должна быть достаточной для большей части средств воздушной доставки. Программное обеспечение обработки сигналов позволяет ограничивать требования по объему сохраняемой информации при меньшей периодичности поступления данных. Компьютер общего назначения 550 в связи с ППУ 558 способен считывать и записывать с и на читаемые компьютером средства 552 (проиллюстрированные в примере преимущественного исполнения жестким диском с емкостью в несколько гигабайт для записи команд и сохранения данных). Для специалиста очевидно, что под читаемыми компьютером средствами можно понимать один или несколько типов таких средств из ряда, например, элементы памяти, оптические диски, дискеты, сетевые и другие накопители информации или им подобные.
ППУ 558 поддерживает различные виды ПЦС. Если модуль ППУ 558 имеет специфическую для данного приложения структуру, то ПЦС могут быть использованы в любом виде, возможном для свободного приобретения. Тем не менее, ППУ 558 предусматривает исключение ненужных (для данного приложения) компонентов, которые часто присутствуют на платах соответствующего назначения, находящихся в коммерческом обороте, и которые в результате их выхода из строя приводят к непригодности всю плату. В результате, ППУ 558 имеет меньшую вероятность выхода из строя при неблагоприятных внешних условиях. Сам ПЦС, имплантируемый в ППУ 558, представляет собой в примере преимущественного исполнения коммерчески доступный процессор класса TMS320C40 производства Тексас Инструменте.
Силовые модули удовлетворяют требованиям по напряжению и току для различных используемых электронных составляющих. Силовые модули включают силовой модуль процессора (СМП) 560, входной силовой модуль (ВСМ) 562С для БГФ, входной силовой модуль (ВСМ) 562В для базы, силовой модуль привода катушки (СМПК) 564, аналоговый силовой модуль (АСМ) 568F для флоутера, аналоговый силовой модуль 568В для базы и аналоговый силовой модуль 568С для БГФ. Для специалиста известно, что наиболее типичными для электронных цепей являются условия, определяемые комбинацией +/-12 В, +/-15 В и 5 В по постоянному току, которые и удовлетворяются силовыми модулями 560-568. Поскольку цифровая электроника может создавать электронный шум для аналоговых устройств, существует два отдельных пути преобразования входного сигнала постоянного тока в ток, необходимый для компонентов системы - один для цифровых плат и другой для аналоговых плат.
Входной Силовой Модуль (ВСМ) 562 служит для создания защиты от пиков по напряжению, типичных для летательных аппаратов, а также защищает системы летательного аппарата от проблем, связанных с присутствием гравитационного градиометра, описываемого настоящим изобретением. ВСМ 562 также служит в качестве распределительной платы для других силовых модулей 560, 564-568.
Силовой модуль привода катушки (СМПК) 564 является основным источником силовой энергии и ее вариаций. СМПК 564 располагают индивидуально для минимизации наводки им электронных шумов в других аналоговых устройствах.
В одном из примеров конкретного исполнения система электронного обеспечения 518 (Фиг.5) адаптирована для приема данных позиционирования от ИНС 112 и ГСП 114 (Фиг.1). Альтернативно, данные, собранные системой электронного обеспечения 518 от гравитационного градиометра 600 могут быть интегрированы с маршрутными данными полета от ИНС 112 и ГСП 114 после того, как сбор таких данных будет завершен (например, по мере завершения исследований), используя систему электронного обеспечения 518 или самостоятельный компьютер.
Для специалиста очевидно, что состав компонентов, их разрешение, периодичность запросов или скорость выдачи сигнала или другие особенности системы электронного обеспечения 518 могут варьироваться в зависимости от различных особенностей миссии, точности ее проведения или аналогичных требований.
ПЦС на ППУ 558 программируют с целью получения системы управления для работы и управления БТФ 222, БГФ 224 и гравитационного градиометра 600. Контроллеры БТФ и БГФ имеют аналогичную степень сложности. Схема систем управления проиллюстрирована функциональной блок диаграммой на Фиг.5Е. БГФ 224 оснащен контроллером типа ДПИП, для которого относительное положение стремится к доминанте для низких частот (<0,5 Гц), а поступательные ускорения стремятся к доминанте для промежуточных частот (от 0,5 Гц до 5 Гц). БТФ 222 также оснащен контроллером типа ДПИП, использующим относительное положение и ротацию для промежуточных частот (от 0,1 Гц до 5 Гц), а также линейное и ротационное ускорение для более высоких частот (от 1 Гц до 30 Гц). Активное управление выключается последовательно выше 5 Гц для БГФ и выше 30 Гц для БТФ. Система рассчитана таким образом, что выше этих частот становится достаточной пассивная фильграция.
Диаграмма управления системы 548 проиллюстрирована на Фиг.5Е. Контроллеры БГФ и БТФ и гравитационного градиометра работают параллельно от одного кода управления. Система управления гармонично связана с динамикой системы. Диаграмма управления иллюстрирует только наиболее существенные блоки, обычные для систем такого типа. Блок аналого-цифрового пребразователя (А/Ц) с управлением сигналом 584 представляет на функциональном уровне усиление и фильтрацию посторонних сигналов МОСА 576 вместе с аналого-цифровым преобразованием. Блок калибровки 582 иллюстрирует преобразование измеренных напряжений в калибровочные сигналы индивидуальных входных каналов. Определяя в динамике их изменений коэффициенты рабочих каналов контроллеров, эти блоки повышают стабильность работы контроллеров.
Цифровые фильтры 588 входного канала (фильтры 588а) обычно представляют собой фильтры с граничной частотой пропускания типа Баттерворт для положения и ориентации и фильтры с заданной полосой пропускания типа Баттерворт для акселерометров. Они являются частью алгоритма управления для оптимизации работы системы. Фильтры со стороны выхода используют для той же цели, хотя их функции отклика будут отличаться. Следует отметить, что фильтрация каждой цепи имеет отличающийся характер, т.к. коэффициенты контроллеров каждой цепи изменяются с различной закономерностью в зависимости от частоты.
М-1 MAP задействует необходимые силы и моменты сил через различные актюаторы как предписано алгоритмами управления, описанными выше, а также определяет значения токов в катушках, необходимых для создания указанных сил и моментов. Управляющие усилия прикладывают, как правило, к центру масс ступеней фильтрации, включая массу полезной нагрузки. Поскольку центр масс не совпадает центром приложения усилий актюаторов, геометрия системы должна учитывать это отклонение. В примере преимущественного исполнения такая геометрия системы введена в качестве программного продукта в виде файла данных, имеющего специфический характер для системы.
Сумматоры 592 и интеграторы 594, представленные на Фиг.5Е, являются стандартными блоками, обычно использующимися для аналогичных целей в других физических приложениях. Измеряемое ускорения флоутера 502 передают в цепь управления ускорением 596 (верхняя цепь системы управления, представленная на Фиг.5Е). Положение и ориентация измеряются независимо. Положение/ориентация и ускорение связывают математически путем двойного интегрирования в блоке 594. Однако функцию физического интегратора в цепи управления исполняет сама физическая система.
Функции суммирования 592, в иллюстрируемом примере преимущественного исполнения, осуществляет программное обеспечение системы управления. Другими словами, по мере того, как определена требуемая величина управляющей силы введением в действие петли ускорения 596 (верхняя петля системы управления, представленной на Фиг.5Е), а искомое положение определено введением в действие петли положения 598 (нижняя петля системы управления, представленной на Фиг.5Е), обе эти величины суммируются сумматором 592 (по одному на каждую из петель ускорения 596, положения и ориентации 598 плюс поправка на силы, вводимые подвесными кабелями 232, 414 и 418.) для получения окончательной величины требуемой силы.
На Фиг.6 представлено схематическое изображение гравитационного градиометра 600 со сдвоенными грузами. Гравитационный градиометр 600 включает пару стержней 602а, 602b, ориентированных по типу "ножниц", с возможностью их поворота относительно оси 604. Несмотря на то, что на чертеже представлены стержни прямоугольного сечения, они могут иметь любую другую форму сечения. Каждый стержень 602 имеет верхний конец 608 и нижний конец 610. При отсутствии воздействия гравитационного градиента (например, в состоянии равновесия) стержни 602а, б02b повернуты под прямым углом друг к другу. Дополнительные подробности выбранного варианта гравитационного градиометра, используемого для реализации настоящего изобретения, могут быть получены из описания аналогичных устройств в указанных выше патентах Ван Канна.
Характеристики стержней 602 описываемого градиометра были выбраны из расчета возможности измерения градиента в 1 Ио с учетом влияния других описываемых элементов. Тем не менее, для специалиста в описываемой области очевидно, что при различных назначениях исследований и вариантах полетных программ могут быть сделаны соответствующие модификации описанных особенностей патентуемого устройства.
Влияние таких аномалий массы как представленные примеры масс 606а или 606b вызовет вращение стержней 602а и 602b относительно оси поворота 604 таким образом, что ближайшие и наиболее удаленные пары концов стержней будут сходится под действием аномалии масс 606. Ось поворота 604 более подробно представлена в перспективе и в плане на Фиг.6А и Фиг.6В. Как показано на Фиг.6А и Фиг.6В волокно подвески 620 имеет относительно меньший размер в х-направлении по отношению к у- и z-направлениям. В результате, ускорения в у и z-направлениях, воздействующие на гравитационный градиометр 600, вызовут относительно небольшую деформацию волокна 620. Однако размеры волокна 620 не позволяют избежать погрешностей вообще (не вызывая сигналов погрешности) при воздействии ускорений на гравитационный градиометр 600 в х-направлении. Пример такой деформации, вызванной положительным влиянием ускорения в х-направлении, показан прерывистыми линиями на Фиг.6А в виде деформации 620А и может быть также понятен из Фиг.8.
Угол поворота стержня 602 обратно пропорционален кубу расстояния от аномалии массы. Линейное отклонение (обозначенное символом "δ") конца стержня (например, нижнего конца стержня 610а) от его положения равновесия (показанного частично штриховыми линиями) может быть измерено и использовано для определения угла поворота (□) стержня от его положения равновесия.
По отношению аномалии массы 606а, нижние концы 610а, 610b будут сходится навстречу друг другу. Аналогично, верхние концы 608а, 608b будут двигаться навстречу друг другу - показывая значение гравитационного градиента Gzz. Однако аномалия массы 606b вызовет движение нижнего конца 610b навстречу верхнему концу 608а. Аналогично, нижний конец 610а и верхний конец 608b будут смещаться навстречу друг другу - показывая значение гравитационного градиента gxx. Становится ясно, что аномалия массы 606b вызовет перемещения нижних концов стержней 610а, 610b и верхних концов стержней 608а, 608b раздельно друг от друга - прямо противоположно эффектам, вызванным аномалией массы 606а. Следовательно, гравитационный градиометр адаптирован для измерения величины (Gzz-Gxx).
Несмотря на то, что описанием проиллюстрирован только один пример гравитационного градиометра 600, измеряющего (Gzz-Gxx) и установленного на платформе 226 (Фиг.2), могут быть также установлены и применены дополнительные гравитационные градиометры, аналогичные гравитационному градиометру 600, но установленные в альтернативных направлениях для измерения одного или более значений типа (Gzz-Gyy), (Gxx-Gyy). Следует учесть также, что могут быть использованы и другие конструкции и типы гравитационных градиометров. Однако эксперименты показали, что наилучшими синергетическими свойствами обладает совместное использование гравитационного градиометра со сдвоенными грузами и системой фильтрации поступательного действия 206 с относительными размерами и характеристиками наибольшей части подвижных транспортных средств, в частности летательных аппаратов, если используют описанное исполнение патентуемого устройства. Во-первых, форма типичной кабины летательного аппарата предполагает наибольшее пространство для поступательных перемещений БГФ в х-направлении с меньшими пространственными возможностями, ограниченными стенками кабины в направлениях z и у. Для использования этого преимущества БГФ летательного аппарата может быть построен с возможностью поступательных перемещений или пределами перемещений в х-направлении в значительно большей степени, чем в направлениях z и у (пределы определены размерами кабины летательного аппарата). Это совпадает с наблюдением, что ускорения и результирующее перемещение в результате турбулентности и других причин в х-направлении имеют относительно небольшую величину и легче поддаются управлению. Кроме этого, компенсация ускорений в х-направлении имеет наибольшее значение для поглощения в случае использования конструкции Ван Канна со сдвоенньми грузами для измерения (Gzz-Gxx) как следует из вышеприведенного пояснения. Следовательно, к таком подвижном транспортном средстве как летательный аппарат, комбинация системы фильтрации поступательного действия и гравитационного градиометра конструкции Ван Канна со сдвоенными грузами для измерения (Gzz-Gxx), оба подробно описанные выше, позволяет наилучшую изоляцию гравитационного градиометра от действия специфических ускорений, имеющих наиболее критичное значение для точности производимых измерений. Изобретение минимизирует доминирующие погрешности, вызванные ускорениями, а вышерассмотренная комбинаторика исполнения предоставляет преимущества синергетических взаимодействий, позволяющих минимизировать наиболее важные ускорения и получить наибольшие преимущества при реализации конструкционных особенностей устройства для измерения (Gzz-Gxx). А также, несмотря на возможность измерения и других составляющих гравитационного градиента, значение результата измерения (Gzz-Gxx) таково, что оно может предоставить при необходимости достаточную информацию и, если требуют обстоятельства, использование только одного этого компонента может обеспечить всю полноту синергетических преимуществ, описанных выше, без неизбежных усилий по монтажу и согласованию измерительных систем других компонентов.
Если аномалия массы 606а представляет собой рудный депозит мощностью в 30 мегатонн на расстоянии ("h") в 1 км от гравитационного градиометра 600 (исключая в данный момент действие аномалии массы 606b) будет иметь место и будет измерено линейное отклонение приблизительно в 1·10-13 метров. Это линейное перемещение преобразуется для случая иллюстрируемого гравитационного градиометра 600 в поворот (□) на величину примерно 3·10-13 радиан.
Обращаясь к иллюстрациям Фиг.1-6, следует отметить, что при прекращении проведения измерений с помощью устройства измерения гравитационного градиента 100 на борту летательного аппарата 106 устройство фильтрации 206 должно быть переведено в положение транспортировки или блокировки. В положении транспортировки или блокировки панели поступательного перемещения БГФ 224, устройство магнитной подвески БТФ 222 и гравитационный градиометр 600 должны быть зафиксированы для предотвращения любого повреждения, возможного в результате нештатных перемещений. Перед приземлением устройство фильтрации 206 возвращают в транспортное или заблокированное положение по тем же причинам.
По мере взлета летательный аппарат 106 должен следовать в зону проведения измерений гравитационных градиентов. В зоне измерений автопилот или пилот самостоятельно дает команду на начало проведения измерений. Система автопилота может быть запрограммирована на определенный маршрут с целью проведения наиболее полного комплекса измерений. По мере прихода в зону измерений задействуют устройство фильтрации 206, инициирующее действие панелей перемещений БГФ 224, и устройства магнитной подвески БТФ 222 по описанным выше схемам. Чаще навигационная система 108 летательного аппарата 106 начинает также фиксировать данные по идентификации реального маршрута полета 120, а также по идентификации маршрута движения 1.30 гравитационного градиометра путем введения данных относительного положения и ориентации БГФ и БТФ. Как описывалось выше, эти данные маршрута полета, обычно после завершения полетных измерений, совмещают с измерениями гравитационного градиента таким образом, чтобы получилась карта гравитационных градиентов, которая совмещает данные гравитационной градиометрии с обычной географической или геопозиционной картой (которая может быть как двухмерной, так и трехмерной в печатном или электронном формате). Альтернативно, гравитационные градиенты и навигационные данные могут быть совмещены как в реальном времени, так и со сдвигом по времени.
Как описывалось выше, по мере движения летательного аппарата 106 по маршруту полета 120 летательный аппарат 106 подвергается внешним воздействиям, изменяющим его идеальный или расчетный маршрут полета 104. Система автопилота совместно с навигационной системой 108 может попытаться уменьшить влияние этих воздействий путем измерений и за счет средств, описанных выше. Наиболее совершенные авиационные системы управления могут обладать способностью поддерживать маршрут движения летательного аппарата очень близко к маршруту 104. Однако специалисту понятно, что необычайно сложно уменьшить эти воздействия до уровня, необходимого для гравитационного градиометра 600. Соответственно, акселерометры 416, 410, 228 БГФ 224 выделяют любые ускорения в соответствующем частотном диапазоне их следования. Эти данные фильтруются и компенсируются средствами БГФ 224, преимущественно в отношении низкочастотных ускорений. Данные по ускорениям, полученные с акселерометров 416, 410, 228, поступают на контроллеры БГФ 224 для определения любого низкочастотного перемещения летательного аппарата 106 достаточно большой амплитуды. Используя эти данные по перемещениям и ускорениям, БГФ 224 регулирует положение ступеней перемещения так, чтобы гравитационный градиометр 600 продолжал свое движение вдоль сглаженного маршрута 130, соблюдая относительно постоянную скорость движения (т.е. скорость, близкую к средней скорости летательного аппарата 106).
Перемещения БГФ 224 предотвращают возможность соприкосновения БТФ 222 с пределами движения БГФ 224 (т.е. БТФ 222 может достигать один или более из физических пределов перемещений БГФ 224 (±xmax, ±ymax и ±zmax). Это действие реализуют контроллеры БГФ 224, активно отслеживающие положение каждой из трех ступеней перемещения 216, 218 и 208, и, как описывалось, прикладывая слабую "восстанавливающую силу", действие которой сказывается в направлении всех элементов полезной нагрузки к их первоначальному положению. В результате приложения восстанавливающих сил полезные нагрузки каждой из ступеней перемещения 216, 218 и 208 не достигнут физических пределов перемещения БГФ 224 в ходе большей части сценариев полета. Следовательно, БТФ 222 и гравитационный градиометр 600 приобретают возможность работы без воздействия сильнейших ускорений, имеющих место при ударном взаимодействии этих устройств с одним или несколькими физическими пределами движения БГФ 224.
В результате взаимодействия системы управления полетом (ручного или автоматического действия) и навигационной системы 108 летательного аппарата 106 и БГФ 224 ускорения гравитационного градиометра и БТФ 222 по мере его движения по траектории полета 130 существенно снижаются по сравнению с ускорениями, воздействующими на конструкцию летательного аппарата по мере его движения по траектории 120. В действительности, БТФ 222 (или говоря более точно, часть БТФ 222, смонтированная с БГФ 226 - базой 504) в результате взаимодействий и работы описанных выше испытывает лишь небольшие высокочастотные (выше примерно 1,0 Гц) ускорения (а также перемещения малой амплитуды, являющиеся следствием воздействия этих ускорений).
Во время своей работы БТФ 222 одновременно обеспечивает уменьшение высокочастотных ускорений в шести степенях свободы за счет действия своего устройства магнитной подвески. Акселерометры 516, как описывалось выше, измеряют ускорения в шести степенях свободы базы 504 относительно свободного пространства. Ускорения, измеренные акселерометрами 516, в дальнейшем используют совместно с работой датчиков положения 520 и системой управления, оснащенной электронной системой 518, создавая силу за счет генераторов Лоренца 506 и прикладывая ее к флоутеру 502, воспринимающему малоамплитудные высокочастотные ускорения от базы 504. Отслеживание перемещений флоутера 502 по отношению к базе 504 осуществляют системой управления БТФ 222 с тем, чтобы предотвратить воздействие внешних воздействий на флоутер 502, способных иметь место, если флоутер 502 достигнет любой из физических пределов своего перемещения в поле базы 504.
БТФ 222 уменьшает высокочастотные ускорения с малой амплитудой в шести степенях свободы флоутера 502 и связанной с ним полезной нагрузой виде гравитационного градиометра 600.
После завершения полета объединяют данные измерений гравитационных градиентов (результаты измерений гравитационного градиометра 600) и положений, в которых эти измерения были сделаны (полученные от навигационной системы 108). Кроме этого, записывают амплитуды и направления приложения любых восстанавливающих сил, а также время или положение, из которого или во время которого эти восстанавливающие силы были приложены. Также могут быть использованы данные по изменению собственных масс, а именно положения центра масс и/или абсолютных значений масс. Данные корректировки собственных масс могут быть введены или получены до, во время или после полета и определяют распределение масс по летательному аппарату, его системам, его запасам топлива, приборам и другому несомому оборудованию, а также распределение экипажа и т.д. (и, при необходимости, изменение этих факторов), которые влияют на данные, выдаваемые гравитационным градиометром 600. Кроме этого, могут быть учтены данные описания местности проведения измерений с борта летательного аппарата или топографические данные местности. Данные топографии могут быть получены с помощью лазерного альтиметра, входящего в состав систем летательного аппарата 106 (или его эквивалента типа радиолокационных систем, топографических карт, и т.д.). Полученные данные могут быть использованы для образования двух или трехразмерной "карты" распределения гравитационных градиентов на измеряемой территории. Используя эту карту и традиционные методики, могут быть выявлены значимые геологические депозиты и им подобные специфические объекты, характеризующиеся гравитационными аномалиями.
Несмотря на то, что система 100 в состоянии обеспечить необходимую информацию с гравитационного градиометра 600, могут быть введены дополнительные усовершенствования в систему управления летательным аппаратом. Например, алгоритмы управления движением вперед, использующие датчики атмосферных неоднородностей, выявляющие приближающиеся атмосферные неоднородности, объединяя свои данные с известными характеристиками полета летательного аппарата, могут быть использованы для корректировки полета с целью дальнейшего уменьшения влияния обнаруженных атмосферных неоднородностей. В дальнейшем могут быть использованы системы управления (либо с обратной связью, либо движения вперед, индивидуально или в сочетании) вместе с традиционными системами автопилота для приближения траектории к идеальной 104. Дополнительно или в качестве альтернативы могут быть введены усовершенствования в конструкцию самого летательного аппарата, обеспечивающие улучшение его управляемости. Эти усовершенствования могут включать, например, прямое управление подъемом (ПУП), используя обычные элероны, различные спойлеры, закрылки быстрого реагирования или даже концепцию свободного крыла, обеспечивая компенсацию и управление вертикальными перемещениями (в направлении z); различные системы аэродинамического воздействия особенностями корпуса или дополнительным хвостовым оперением, управление шагом винта или вектором тяги сопла для компенсации и управления движением вперед (в направлении х); вертикальные закрылки, система дифференцированного управления тягой двигателей (в случае использования летательного аппарата с парной силовой установкой), вертикальные усилители крыла или закрылки вертикального действия дают эффект улучшения боковой управляемости (в направлении у).
Кроме этого, сигналы управления могут поступать на автопилот/навигационную систему 108 с устройства фильтрации 206.
В качестве обобщения, измерительный прибор совмещение двухступенчатой системой фильтрации движения с активным управлением. Прибор и двухступенчатая система фильтрации могут быть смонтированы внутри или на подвижном средстве перемещения, таком, как, например, летательный аппарат. Первая ступень двухступенчатой системы обеспечивает фильтрацию параметров движения низкочастотного следования, или представляет ступень, позволяющую движение с низкой частотой следования изменений (т.е. движение с частотой ниже граничного значения частоты первой ступени) с последующим переходом параметров движения на вторую ступень и далее на прибор, который может быть гравитационным градиометром, смонтированным на второй ступени. Первая ступень существенно поглощает колебания изменения направления движения, следующих с частотой выше граничной частоты первой ступени таким образом, что вторая ступень и прибор все меньше и меньше реагируют на изменения траектории, так как частота движений становится выше граничной частоты. Идеальная первая ступень не требует дальнейшей фильтрации, т.к. первая ступень идеально фильтрует изменения параметров движения на всех частотах выше граничной частоты.
Однако существуют технологические ограничения возможностям проектирования. Для целей фильтрации перемещений с очень низкой частотой следования первая ступень может иметь достаточно большие размеры и, учитывая связанные с этим динамические характеристики, иметь наименьшую частоту собственных колебаний около 10 Гц и много других более высоких частотных мод. На этих частотах система входит в колебательный резонанс. Для предохранения прибора от этих колебаний используют вторую ступень, конструкция которой может позволить ее малые размеры и частоту собственных колебаний порядка 100. Гц. Вторая ступень представляет собой систему фильтрации колебаний с нижней граничной частотой, предохраняющей прибор от колебаний с частотой выше граничной частоты второй ступени. Граничная частота колебаний второй ступени может быть установлена в момент проектирования системы со значением выше граничной частоты первой ступени и ниже наименьшей частоты собственных колебаний (также известной как первая динамическая мода) первой ступени.
На практике, гравитационный градиометр может быть смонтирован с двухступенчатой системой фильтрации колебаний с активным управлением и использован в целях проведения геологической разведки, измеряя гравитационные ускорения Земли. Путем повтора измерений с разных точек может быть построена карта гравитационных ускорений, которая в дальнейшем может быть использована для выявления геологических неоднородностей. Эти геологические неоднородности могут включать минеральные депозиты, запасы газа и жидкостей, туннели и другие полости, а также пористые структуры, содержащие газ и жидкость, или скрытые объекты типа подводной лодки или затонувшего корабля.
При этом для специалиста очевидны и другие возможные усовершенствования объекта изобретения, охватываемого формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСОВЕРШЕНСТВОВАНИЯ ИЗМЕРЕНИЯ ГРАДИЕНТА УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ (ВАРИАНТЫ) | 1999 |
|
RU2185642C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВТОРИЧНОЙ ДОБЫЧИ УГЛЕВОДОРОДОВ | 1999 |
|
RU2203397C2 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ И ВИБРОЗАЩИТЫ, В КОТОРОЙ ПРИМЕНЯЮТСЯ НИЗКОФРИКЦИОННЫЕ ТРОСОВЫЕ ДЕМПФЕРЫ | 2014 |
|
RU2645561C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2243133C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757549C2 |
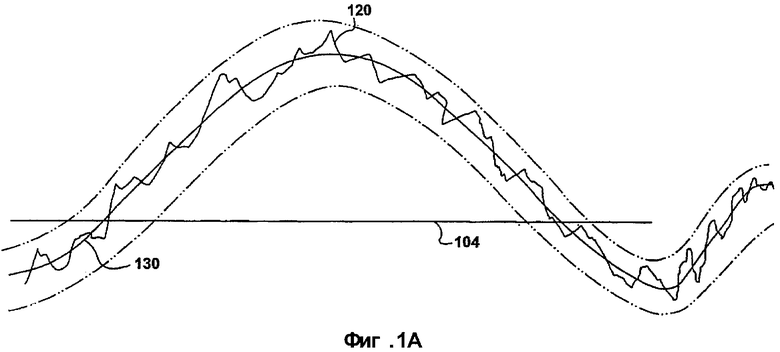

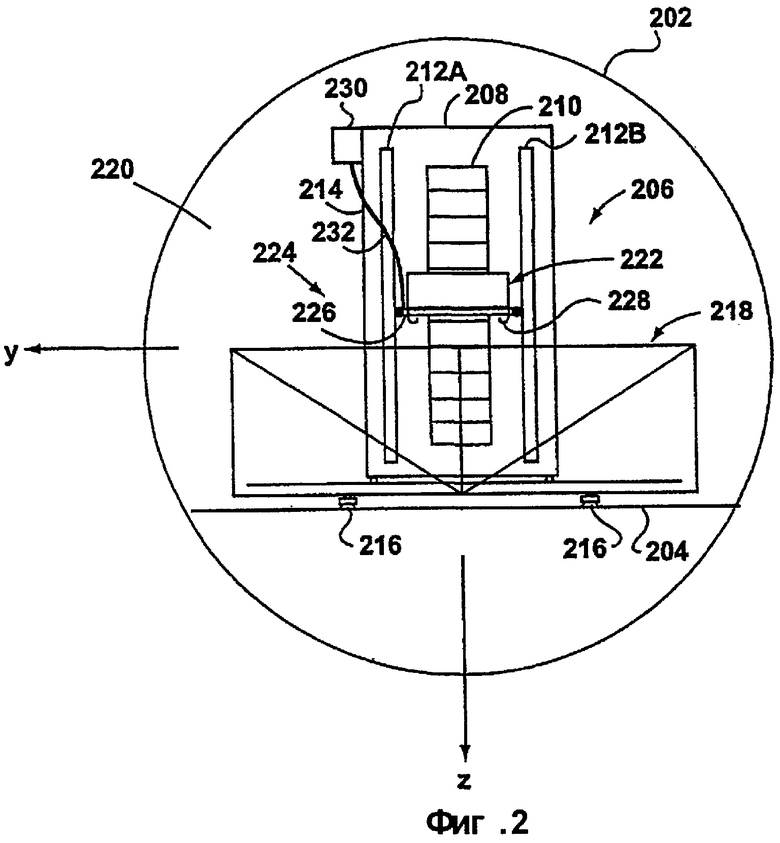









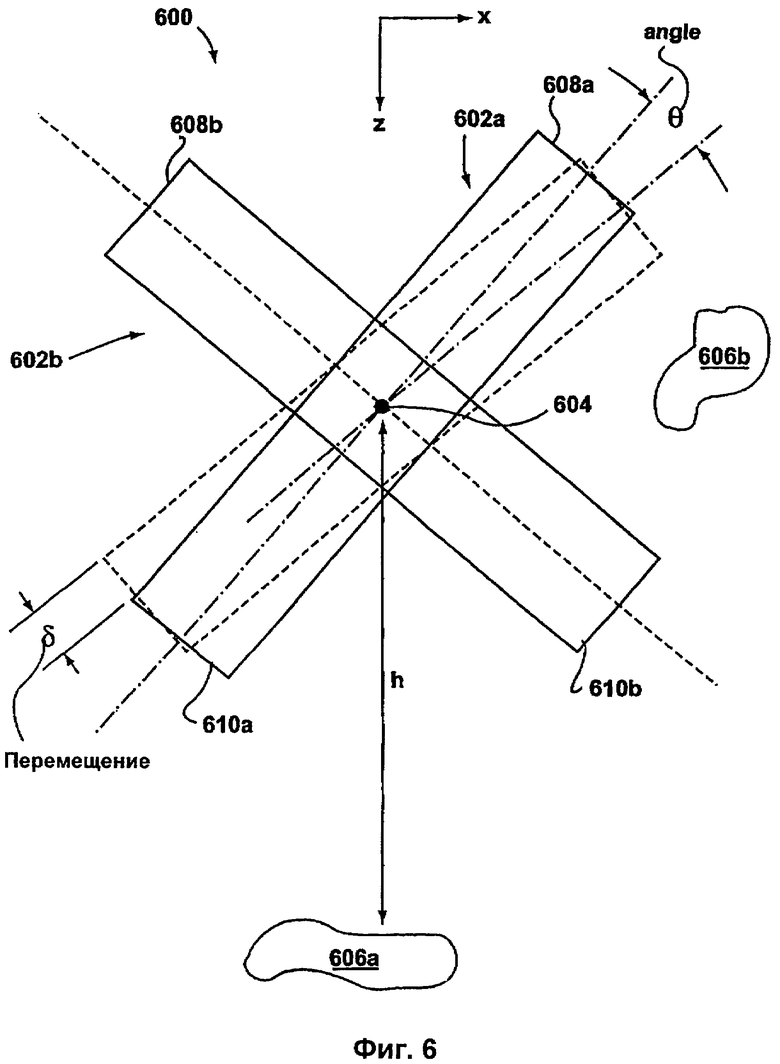





Изобретение относится к способам и устройствам измерения гравитационного ускорения и гравитационного градиента и, в частности, к способам и устройствам использования и измерения локальных вариаций гравитационного поля тел земного происхождения. Сущность: гравитационный градиометр транспортируют на борту подвижного транспортного средства, испытывающего ускорения и перемещения. Осуществляют фильтрацию на ступени грубой обработки ускорений и перемещений выше первой граничной частоты пропускания. Затем производят фильтрацию на ступени тонкой обработки ускорений и перемещений выше второй граничной частоты пропускания, при том, что ускорения и перемещения выражены минимальной частотой, а вторая граничная частота пропускания больше первой граничной частоты пропускания и меньше минимальной частоты вибраций. Отслеживают положение подвижного транспортного средства в шести степенях свободы подвижности твердого тела. Измеряют гравитационным градиометром гравитационные градиенты в момент фильтрации указанных ускорений и перемещений на ступенях грубой и тонкой обработки. Производят табулирование гравитационных градиентов в функции положения подвижного транспортного средства. Технический результат: повышение точности измерений. 8 н. и 25 з.п.ф-лы, 9 ил.
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 6196514 B1, 06.03.2001 | |||
| Гравиразведка | |||
| Справочник под ред | |||
| Е.А.Мудрецовой | |||
| - М.: Недра, 1990, с.186-199 | |||
| ЮЗЕФОВИЧ А.П., ОГОРОДНИКОВА Л.В | |||
| Гравиметрия | |||
| - М.: Недра, 1980, с.168-203, 231-234, 487-480, 503-518 | |||
| US 3564921 А, 23.02.1971 | |||
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| МАЯТНИКОВАЯ ПИЛА | 1928 |
|
SU9653A1 |

