Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к системе для определения в реальном времени параметров летательного аппарата.
УРОВЕНЬ ТЕХНИКИ
Соблюдение ограничений и требований по массам и центровке любого летательного аппарата критически важно для безопасности полетов и эффективности эксплуатации. Эксплуатация сверх ограничения по максимальной массе оказывает неблагоприятное влияние на конструктивную целостность летательного аппарата и летные качества. Более того, эксплуатация с центром тяжести (CG) за пределами апробированных ограничений приводит к затруднениям в управлении полетом.
Более того, неправильная или неточная загрузка летательного аппарата снижает эффективность летательного аппарата в отношении предельной высоты, маневренности, скороподъемности, скорости и эффективности использования топлива. Если летательный аппарат загружен таким образом, что нос крайне тяжел, силы выше нормальных потребуется прикладывать на хвостовой части для удерживания летательного аппарата в горизонтальном полете. Наоборот, если летательный аппарат загружен таким образом, что он крайне тяжел на хвосте, будет создаваться дополнительное лобовое сопротивление, которое вновь потребует дополнительной мощности двигателя и, следовательно, дополнительного расхода топлива, для того чтобы поддерживать скорость полета.
Однако, типично, что по мере того, как летательный аппарат стареет, его массы имеют тенденцию возрастать по сравнению с заводскими массами, например, вследствие повторного окрашивания летательного аппарата без удаления старой краски, накопления пыли/смазки/масла в очищаемых/обслуживаемых деталях летательного аппарата, переоснащения оборудования, и так далее.
В дополнение, грузы (в том числе, топливо), перевозимые в течение каждого полета, типично различаются в отношении веса и расположения грузов.
Ввиду вышеизложенного, также следует отметить, что условия окружающей среды, например, такие как скорость/направление ветра, температура воздуха, влажность, точка росы, и так далее, также оказывают влияние на летные характеристики летательного аппарата, но, в настоящий момент, оценка условий окружающей среды количественно не выполняется.
Таким образом, очевидно, что есть некоторые недостатки в отношении определения параметров летательного аппарата в реальном времени перед взлетом и после посадки.
Сущность изобретения
Предусмотрена система для определения параметров летательного аппарата в реальном времени, содержащая: по меньшей мере два измерительных устройства, каждое из по меньшей мере двух измерительных устройств включает в себя множество встроенных в поверхность грунта датчиков; и по меньшей мере одно устройство обработки для обработки данных, принятых из по меньшей мере двух измерительных устройств. Предпочтительно, чтобы расположение по меньшей мере двух измерительных устройств определялось типом измеряемого летательного аппарата.
Предпочтительно, встроенные в поверхность грунта датчики содержат датчики веса; и датчики присутствия.
Предпочтительно, чтобы каждое из измерительных устройств дополнительно включало в себя датчики формирования изображений, датчики формирования изображений выполнены с возможностью облегчать идентификацию летательного аппарата.
По меньшей мере два измерительных устройства предпочтительно расположены в ряд, чтобы делать возможным определение присутствия летательного аппарата, эшелонирование летательных аппаратов, измерение скорости и классификацию летательных аппаратов.
Система дополнительно может включать в себя по меньшей мере одну метеорологическую станцию, по меньшей мере одна метеорологическая станция должна получать по меньшей мере один относящийся к погоде параметр, например, выбранный из кажущейся скорости ветра, направления ветра, температуры воздуха, температуры покрытия, относительной влажности, влажности покрытия, барометрического давления, теплового индекса, охлаждения ветром, измерителя высоты облаков, поперечной и продольной воздушной тяги ветра, плотности воздуха, и так далее.
Система также дополнительно может включать в себя устройство визуального отображения, выполненное с возможностью указывать параметры летательного аппарата в реальном времени.
Предпочтительно, по меньшей мере одно устройство обработки выполнено с возможностью выполнять по меньшей мере одну из следующих задач, например, таких как, выявление контура, выявление направления, выявление скорости, выявление силы на основании частоты, получение скорости, определение ускорения летательного аппарата, определение замедления летательного аппарата, компенсация входных сигналов по внешним параметрам, формирование входных сигналов по внешним параметрам, линеаризация входных сигналов по внешним параметрам, и так далее.
Параметры в реальном времени предпочтительно выбираются из группы, например, такой как:
(a) вес, масса/сила на отдельных шинах летательного аппарата;
(b) вес, масса/сила на всех отдельных тележках шасси/осях;
(c) суммарный поперечный вес, масса/сила на шине(ах)/тележке(ах) шасси/оси(ях);
(d) суммарный продольный вес, масса/сила на шине(ах)/тележке(ах) шасси/оси(ях);
(e) общий суммарный вес, масса/сила всех шин/тележек шасси/осей;
(f) поперечное распределение веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(g) продольное распределение веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(h) максимальный взлетный вес, масса/сила;
(i) продольный центр тяжести;
(j) поперечный центр тяжести;
(k) общий центр тяжести;
(l) выявление шины;
(m) скорость летательного аппарата;
(n) подтверждение постоянной скорости летательного аппарата;
(o) неравномерность накачки шин;
(p) идентификационный признак, относящийся к летательному аппарату;
(q) информация о поперечной центровке и распределение загрузки летательного аппарата;
(r) информация о продольной центровке и распределение загрузки летательного аппарата; и
(s) информация о центровке и распределение загрузки летательного аппарата.
Предпочтительно, параметры в реальном времени определяют пошлину, взимаемую с летательного аппарата, пошлина взимается за использование места проведения посадки летательных аппаратов.
Во втором аспекте, предусмотрен способ определения пошлины, взимаемой с летательного аппарата, пошлина взимается за использование места проведения посадки летательных аппаратов, способ содержит: измерение параметров летательного аппарата в реальном времени; и определение пошлины с летательного аппарата на основании параметров летательного аппарата в реальном времени.
В третьем аспекте, предусмотрен способ определения посадочного сбора, взимаемого с летательного аппарата, посадочный сбор взимается за использование места проведения посадки летательных аппаратов, способ содержит: измерение параметров летательного аппарата в реальном времени; и определение посадочного сбора с летательного аппарата на основании длительности, которую летательный аппарат находится на месте проведения посадки летательных аппаратов, длительность измеряется от момента, когда измеряются параметры летательного аппарата в реальном времени.
ОПИСАНИЕ ФИГУР
Для того чтобы настоящее изобретение было полностью понятно и без труда осуществлено на практике, далее будут описаны, исключительно в качестве неограничивающего примера, некоторые варианты осуществления настоящего изобретения, описание происходит со ссылкой на прилагаемые иллюстративные фигуры, на которых:
фиг. с 1a по 1f показывают различные варианты осуществления системы по настоящему изобретению; фиг. 2 показывает принципиальную схему измерительного устройства системы по настоящему изобретению;
фиг. 3 показывает ход последовательности операций полупроводникового/кварцевого/пьезоэлектрического измерительного устройства системы по настоящему изобретению;
фиг. 4 показывает ход последовательности операций измерительного устройства для измерения силы системы по настоящему изобретению;
фиг. 5 показывает ход последовательности операций из операций системы по настоящему изобретению; фиг. 6 показывает ход последовательности операций обработки зарегистрированных данных летательного аппарата;
фиг. с 7a по 7b - блок-схема последовательности операций способа, изображающая всестороннюю эксплуатацию системы, изображенной на фиг. 1a;
фиг. с 8a по 7b - блок-схема последовательности операций способа, изображающая всестороннее функционирование системы, изображенной на фиг. 1a;
фиг. с 9a по 9b - блок-схема последовательности операций способа, изображающая всестороннее функционирование системы, изображенной на фиг. 1c;
фиг. 10 - блок-схема последовательности операций способа, изображающая всестороннее функционирование системы, изображенной на фиг. 1d;
фиг. 11 - блок-схема последовательности операций способа, изображающая всестороннее функционирование системы, изображенной на фиг. 1e/f.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления настоящего изобретения предоставляют систему для определения параметров летательного аппарата в реальном времени. Определение параметров летательного аппарата в реальном времени, например, делает возможными систему оперативной взаимной перекрестной проверки/контроля/предупреждения о полных весах, систему сбора пошлины с летательных аппаратов, систему активного контроля/перекрестной проверки/предупреждения о весах и центровках летательного аппарата, любой комбинации вышеупомянутых, и так далее. Система может быть постоянно установленного или портативного типа.
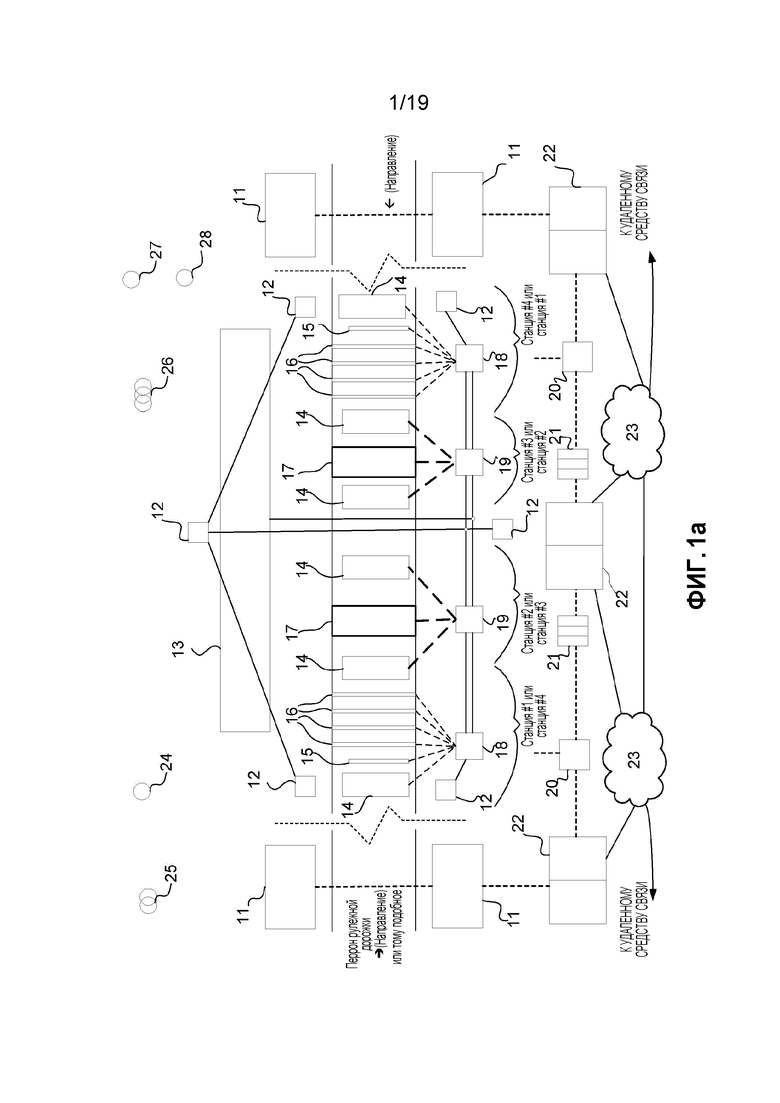
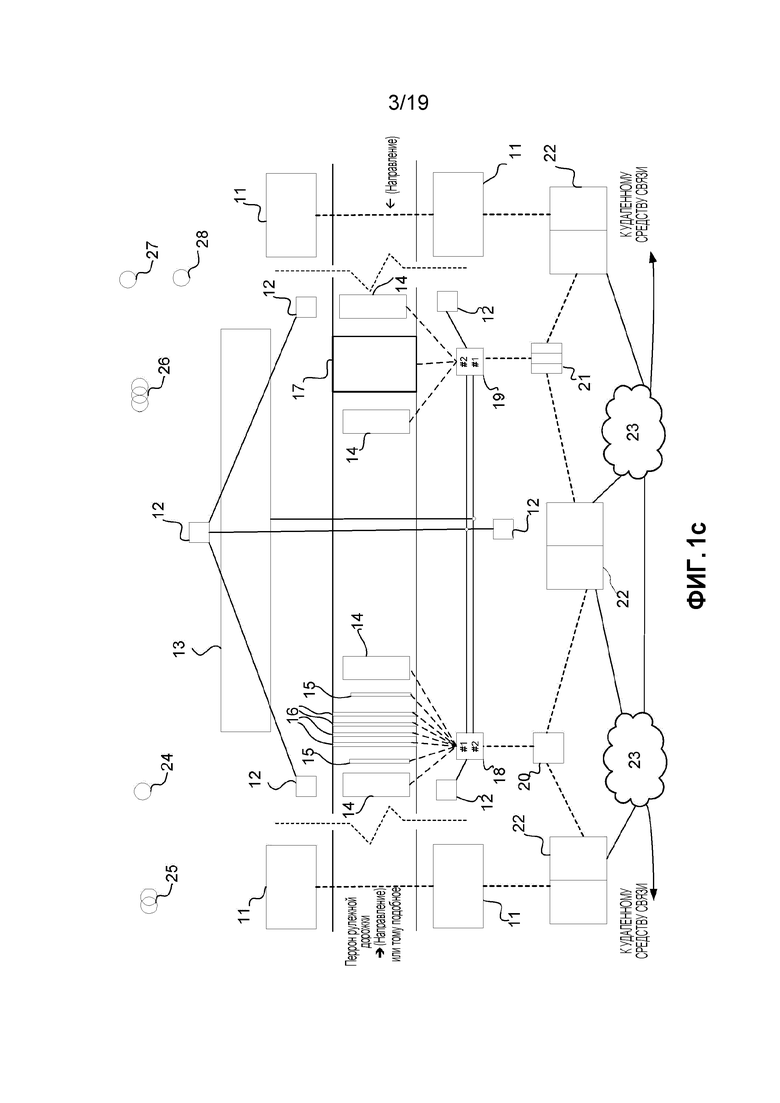
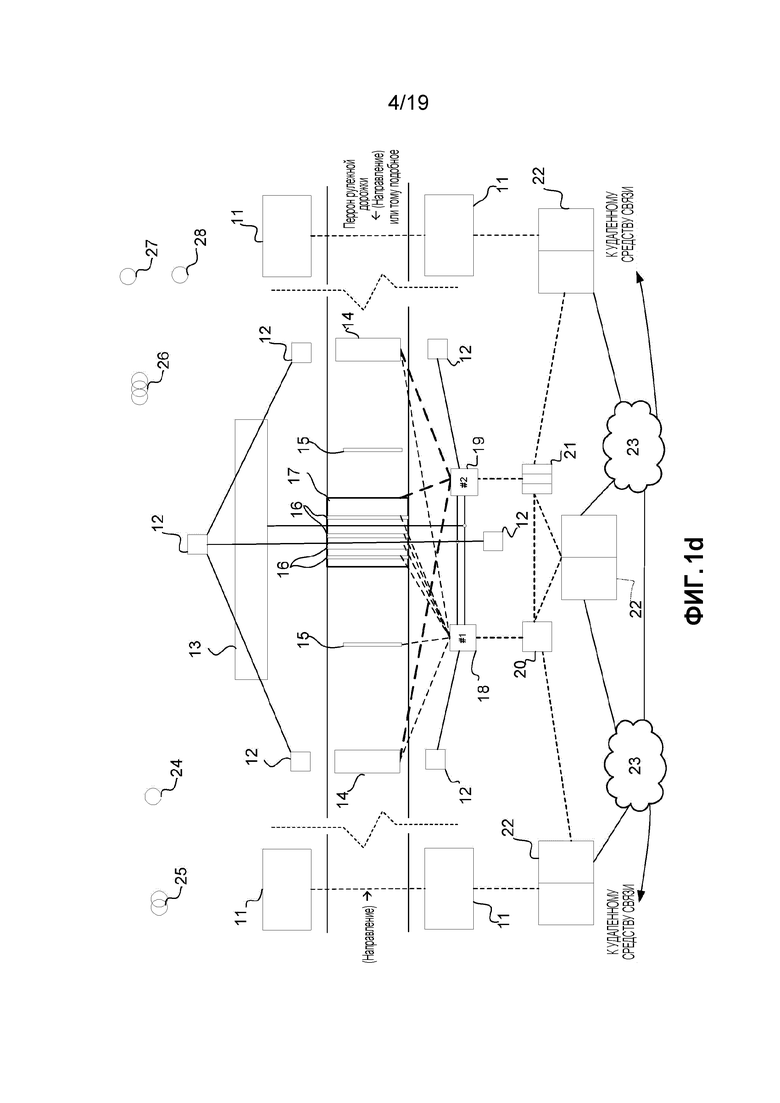
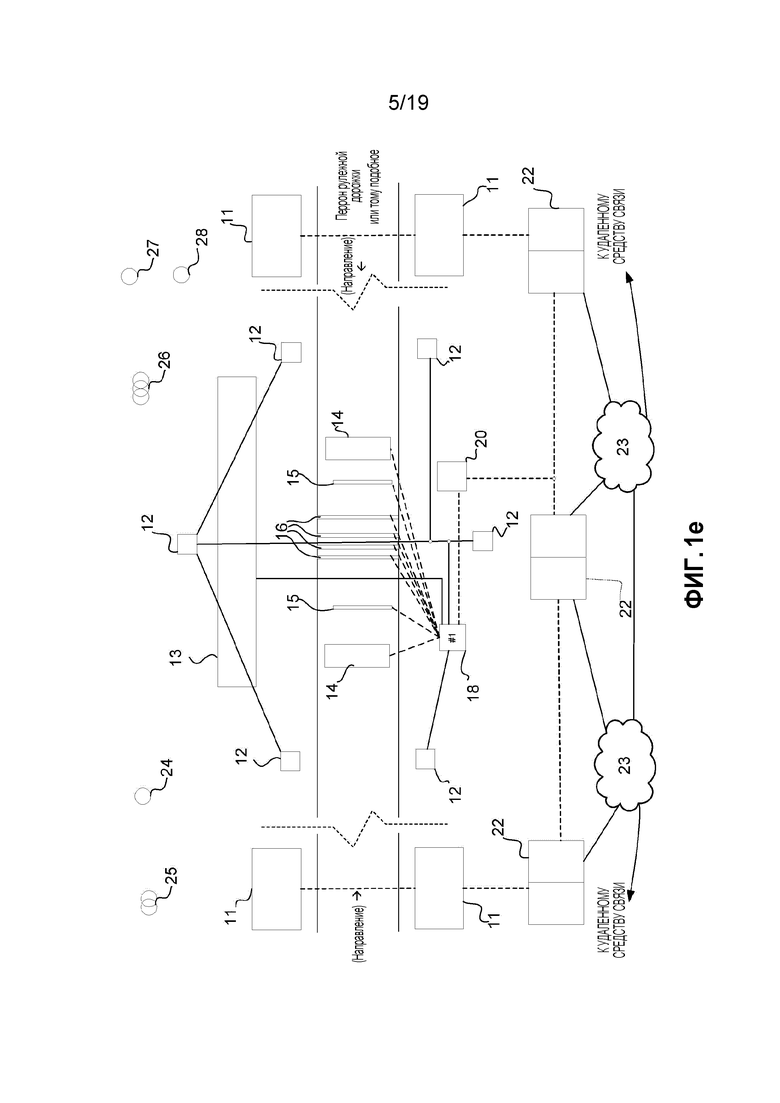
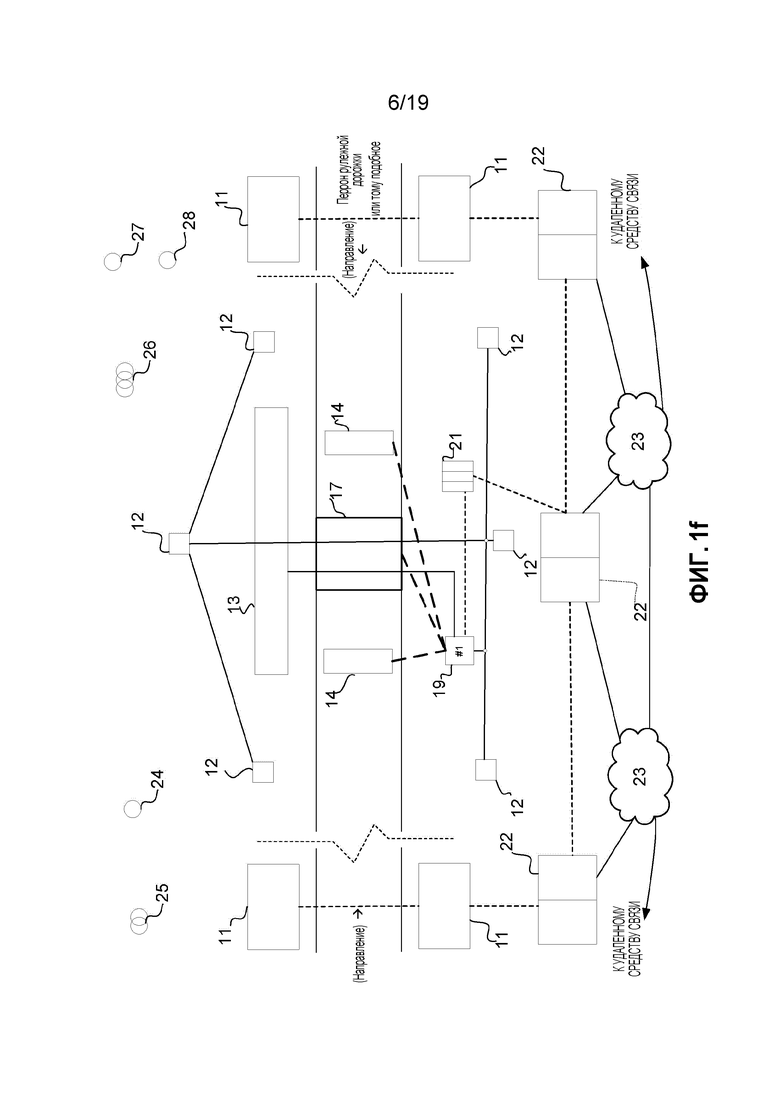
Различные варианты осуществления системы показаны на фиг. с 1a по 1f. Различные варианты осуществления, например, зависят от размера опорной поверхности летательного аппарата, веса летательного аппарата, типа поверхности рулежной дорожки, финансовых ограничений установки, и так далее. Следует принимать во внимание, что различные варианты осуществления системы могут быть в виде единой платформы/панели для расположения необходимых датчиков/считывателей для получения различных параметров летательного аппарата, или она может быть в виде многочисленных платформ/панелей для расположения необходимых датчиков/считывателей для получения различных параметров летательного аппарата.
Соответственными элементами, используемыми в различных вариантах осуществления, изображенных на фиг. с 1a по 1f, являются следующие:
- Элементы 15 и 16: по меньшей мере одна станция полупроводниковых/пьезоэлектрических/кварцевых датчиков.
- Элемент 17: полупроводниковые/пьезоэлектрические/кварцевые датчики и датчики силы, вырабатывающие сигналы полной массы в реальном времени.
- Элемент 13: метеорологические датчики для компенсации/формирования ввода с 15, 16, 17 по внешним или преобладающим факторам, таким как кажущаяся скорость ветра, направление ветра, температура воздуха, температура покрытия, относительная влажность, влажность покрытия, барометрическое давление, тепловой индекс, охлаждение ветром, измеритель высоты облаков, поперечная и продольная воздушная тяга ветра, плотность воздуха, и так далее.
- Элемент 12: камеры для получения общего вида и регистрации, идентификации (ID) и скорости летательного аппарата.
- Элемент 14: индуктивные, емкостные и/или манометрические контуры, используемые для выяснения присутствия летательного аппарата, эшелонирования летательных аппаратов, измерения скорости и классификации летательных аппаратов.
- Элемент 11: система визуального извещения (VMS) может быть основанным на светоизлучающих диодах (LED) дисплейным экраном (монохромным или полноцветным) для отображения параметров летательного аппарата в реальном времени или оперативной информации о рабочем расчетном весе пилоту, связанному экипажу/контролирующим органам в отношении летательного аппарата перед вылетом. VMS может быть планшет/айпад или аналогичное устройство и возможно даже бортовые компьютеры/системы. В качестве альтернативы, VMS может быть выносным устройством отображения типа большого наружного табло, прикрепленным к зданию или отдельно стоящей конструкции, видимым из кабины летательного аппарата.
- Элемент 18: процессор обработки сигналов полупроводниковых/кварцевых/пьезоэлектрических датчиков, электрометрический усилитель, центральное процессорное устройство и блоки для измерения веса на ходу или динамического взвешивания, которые содержат необходимую электронику и компоненты для выявления контура, выявления направления, выявления скорости, выявления силы на основании частоты, получения скорости, способность выяснять ускорение или замедление и уместное значение, компенсацию, формирование и/или линеаризацию входных сигналов для внешних параметров, с программным обеспечением и применительно к оперативной информации с датчиков и камер, базу данных и основанный на сети Интернет/сетевой интерфейс, которые используются для установления всех основных сигналов.
- Элемент 19: процессор обработки динамометрических сигналов, центральное процессорное устройство и блоки для измерения веса на ходу или динамического взвешивания, которые имеют необходимую электронику и компоненты для выявления контура, выявления направления, выявления скорости, выявления силы, компенсации, формирования и/или линеаризации входных сигналов для внешних параметров, с программным обеспечением и применительно к оперативной информации с датчиков и камер, базу данных и основанный на сети Интернет/сетевой интерфейс, которые используются для установления всех основных сигналов.
- Элемент 20: блок центра тяжести, чтобы полупроводниковая/кварцевая/пьезоэлектрическая система вычисляла, рассчитывала и определяла центр тяжести (CG) в реальном времени, прежде всего, применительно к поперечной составляющей, нежели к продольной составляющей и, в заключение, общий центр тяжести в преобладающих условиях в реальном времени.
- Элемент 21: блок центра тяжести, чтобы динамометрическая система вычисляла, рассчитывала и определяла центр тяжести (CG) в реальном времени, прежде всего, применительно к поперечной составляющей, нежели к продольной составляющей и, в заключение, общий центр тяжести в преобладающих условиях в реальном времени.
- Элемент 22: Вычислительная система(ы), которая может состоять из трех или более компьютеров с необходимым программным обеспечением для каждой станции и типа сигнала, и типа станции и/или вспомогательного периферийного оборудования станции и связанных аппаратных вспомогательных приспособлений или периферийного оборудования в виде мониторов, клавиатур, формирователей, резервных устройств, используются возможность межкомпонентного соединения в виде беспроводной связи, локальной сети (LAN), глобальной сети (WAN), модема или аналогичной сети, или интерфейсов и возможности соединения для связи (протоколов спутниковой связи, TCP/IP (протокола управления передачей/межсетевого протокола), сети Ethernet, оптоволоконной связи, RS232, RS422, RS485, NMEA, NMEA 0183, SDI -12 (массовых запоминающих устройств), Gill ASCII, ASCII (американского стандартного кода для обмена информацией), DOS (дисковой операционной системы), USB (универсальной последовательной шины), прямой связи между компьютерами, или любого аналогичного цифрового, аналогового или подобного протокола) и одного или более медиаконвертеров, при этом вычислительная система(ы) осуществляет всю требуемую обработку данных и резервирование локальной собственной памяти и/или данных для выяснения, что все выходные данные и сигналы верны, проверены на действительность по распорядительной базе данных в отношении этой информации, и что безопасно побуждать летательный аппарат взлетать или позже приземляться, а кроме того, для выяснения, что, если есть проблемы, то может быть предпринято корректирующее действие в отношении ненадлежащих, неправильных или аномальных данных следующих параметров:
• максимального взлетного веса (MTOW)/полной массы/рабочего веса в реальном времени;
• центров тяжести;
• весов и центровок;
• состояния давления в шинах;
• аномалий преобразования объема/веса;
• признака состояния накачки отдельной шины;
• веса/массы/силы и их распределения на отдельной шине в реальном времени;
• веса/массы и/или силы и их распределения, действующих на поверхности контакта шины,
• силы и веса и/или массы и их распределения на отдельной шине тележки шасси/оси в реальном времени, действующих на поверхности контакта шины тележки шасси/оси;
• поперечной силы на шине в реальном времени и веса или массы и их распределения, действующих на боковой поверхности контакта шины;
• продольной силы на шине в реальном времени и веса или массы и их распределения, действующих на продольной поверхности контакта шины;
• MTOW в реальном времени;
• суммарной/общей/посадочной массы летательного аппарата в реальном времени;
• классификации летательного аппарата по весу/массе;
• поперечного/продольного центра тяжести летательного аппарата в реальном времени;
• центра тяжести (CG) при полной массе/центра тяжести при MTOW летательного аппарата в реальном времени (комбинации поперечного CG и продольного CG в реальном времени);
• подтверждения топливного баланса;
• условия окончательной перекрестной проверки подтверждения частично рассчитанной и взвешенной MTOW, полученной из соответствующих операций аэропорта/технического обслуживания и журнала учета весов и центровок. Отметим, что полная масса в реальном времени (РАБОЧИЙ ВЕС)=исходная собственная масса (BEW)+вес эксплуатационного снаряжения+вес пассажиров+вес ручной клади+вес досмотренного багажа+вес груза+вес резервного топлива+вес топлива на полет+вес топлива на выруливание и взлет.
- Элемент 23: сеть интернет или сеть передачи данных для использования пользователями, такими как уполномоченные пилоты, клиенты (аэропорт, авиакомпании и/или их связанные операторы), службы, регулятивные органы, следственные службы и сообщества, и так далее.
- Элемент 27: локальное и удаленное резервное хранилище.
- Элемент 28: для использования после эксплуатации и дальнейших научно-исследовательских и опытно-конструкторских работ.
- Элемент 24: передвижное устройство или установка контроля статических весов и центровок, данные которого используются для определения и/или расчета и/или подтверждения/контроля и/или получения нижеследующего, относящегося к летательному аппарату:
• эксплуатационных ограничений летательного аппарата;
• плеча (плеча момента);
• балласта;
• исходной собственной массы (BEW);
• веса груза;
• центра тяжести (CG);
• ограничений CG;
• диапазона CG;
• веса досмотренного багажа;
• собственной массы;
• CG собственной массы;
• запаса топлива;
• разрешенной собственной массы;
• максимальной посадочной массы (MLW);
• максимальной массы перед выруливанием на взлет;
• максимальной взлетной массы (MTOW)
• максимальной массы;
• максимальной массы без топлива;
• минимального запаса топлива;
• момента;
• веса эксплуатационного снаряжения;
• веса пассажиров и ручной клади;
• полезной нагрузки;
• веса резервного топлива;
• стандартной собственной массы;
• веса топлива для взлета;
• веса топлива для выруливания;
• продольной балансировки;
• веса топлива на полет;
• грузоподъемности.
- Элемент 25: мобильная калибровочная установка, используемая для статической калибровки рабочего веса полупроводниковых/кварцевых/пьезоэлектрических датчиков и/или устройств или блоков формирования и/или обработки сигналов, и/или электрометрического усилителя.
- Элемент 26: мобильная калибровочная установка, используемая для статической калибровки рабочего веса датчиков силы и/или устройств или блоков формирования и/или обработки динамометрических сигналов.
Следует принимать во внимание, что соответственные элементы используются для функционирования некоторым образом, как описано выше, и задача сборки всех элементов воедино, чтобы действовали требуемым образом, требует существенной экспертизы и исследований. Следует отметить, что сборка соответственных элементов воедино ведет к эффективной синергии, которая приводит к большим функциональным возможностям, чем те, которые предусмотрены отдельными соответственными элементами.
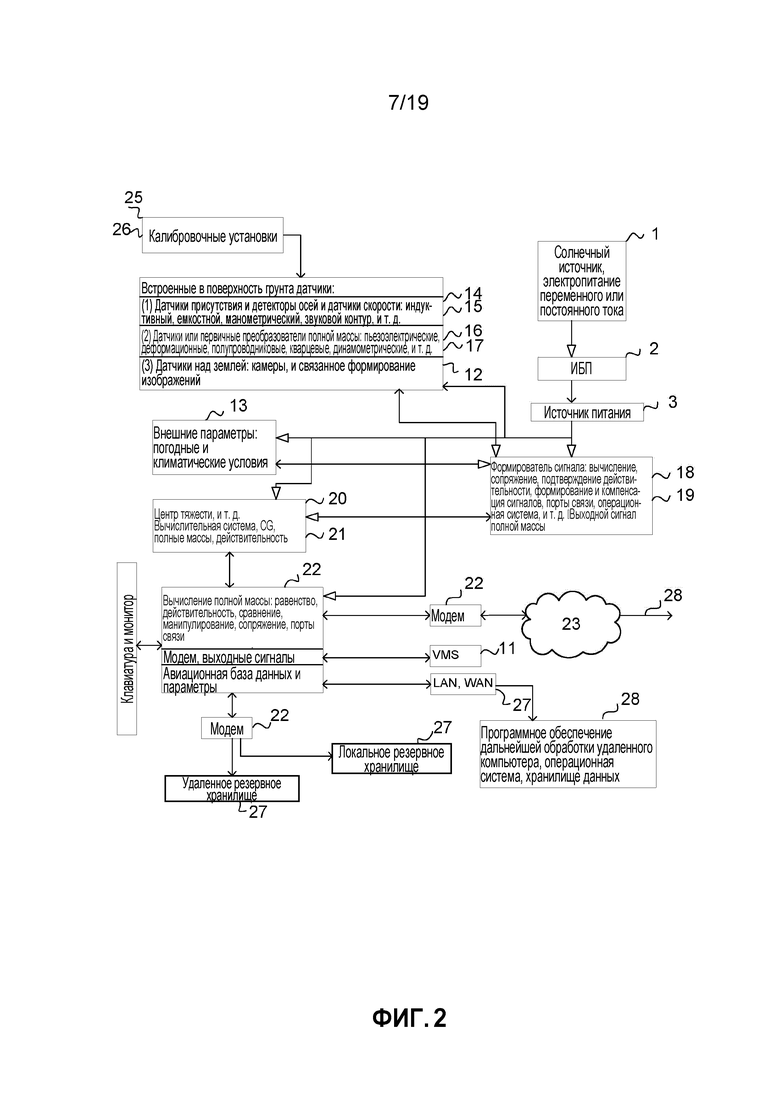
Со ссылкой на фиг. 2, показана принципиальная схема множества измерительных устройств системы по любому из вышеупомянутых вариантов осуществления. Принципиальная схема показывает как соответственные элементы измерительных устройств, так и поток данных между соответственными элементами. На фиг. 2 показаны калибровочные установки 25, 26, обрабатывающие данные, полученные из встроенных в покрытие датчиков 14, 15, 16, 17, 12, и, в силу этого, обработанные данные передаются в формирователь 18, 19 сигналов. Источник 1 электропитания для формирователя 18, 19 сигналов может быть присоединен к источнику 2 бесперебойного питания, чтобы обеспечивать источник 3 питания. Данные с метеорологических датчиков 18 передаются в блоки 20, 21 CG, так чтобы необходимые данные могли обрабатываться вычислительными системами 22 для дальнейшей передачи через сеть 23 передачи данных, локальное/удаленное резервное хранилище 27 или отображаться на VMS 11.
Следует принимать во внимание, что направление рулежки определяется первым пусковым сигналом, принятым из встроенных в покрытие датчиков 14,15,16,17,12 установленного контура. Это используется для выяснения и назначения идентификации расположения весов для данных LHS, RHS, FORE & AFT (левой стороны, правой стороны, передней стороны и задней стороны). С использованием этих данных можно получать краткое характеристическое расположение летательного аппарата и пространственное расположение (например, расстояния для моментов и плеч). Время и скорость используются для расчета этого и, соответственно, раскрывает информацию о весе и центровке.
Со ссылкой на фиг. с 3 по 6, показаны последовательности операций, которые специфичны вариантам осуществления системы, которые показаны на фиг. с 1a по 1f, в частности, в отношении количества датчиков, которые используются, и конфигурации/расположения датчиков.
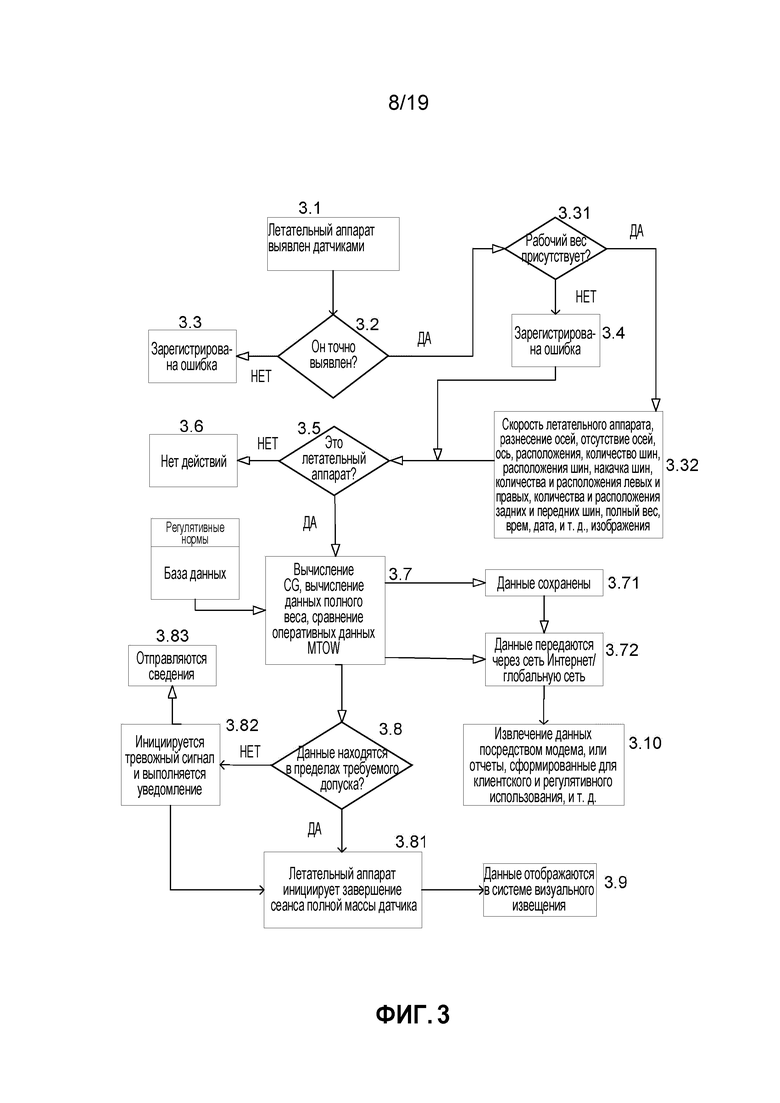
На фиг. 3, показан ход последовательности операций, чтобы показать, каким образом данные отображаются в системе визуального извещения. Прежде всего, датчиками определяется, выявлен ли летательный аппарат (3.1). Затем выполняется оценка, точно ли выявлен летательный аппарат (3.2). Если нет, регистрируется ошибка (3.3). Если да, выполняется оценка, присутствует ли рабочий вес (3.31). Если нет, регистрируется ошибка (3.4). Если рабочий вес присутствует, выполняются измерения, например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесения осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее (3.32).
Впоследствии, выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (3.5). Если нет, последовательность операций прекращается (3.6). Если да, измерения обрабатываются и сравниваются (3.7). Обработанные данные сохраняются (3.71) и/или передаются через сеть (3.72) для последующего извлечения ради использования в различных целях (3.10).
Затем выполняется оценка, точно ли выявлен летательный аппарат (3.8). Если нет, сигнал тревоги инициируется (3.82) и передается в сеть (3.83). Если да, последовательность операций измерения рабочего веса прекращается (3.81), и измеренные данные отображаются в системе визуального извещения (3.9). Если нет, регистрируется ошибка (8.12.1).
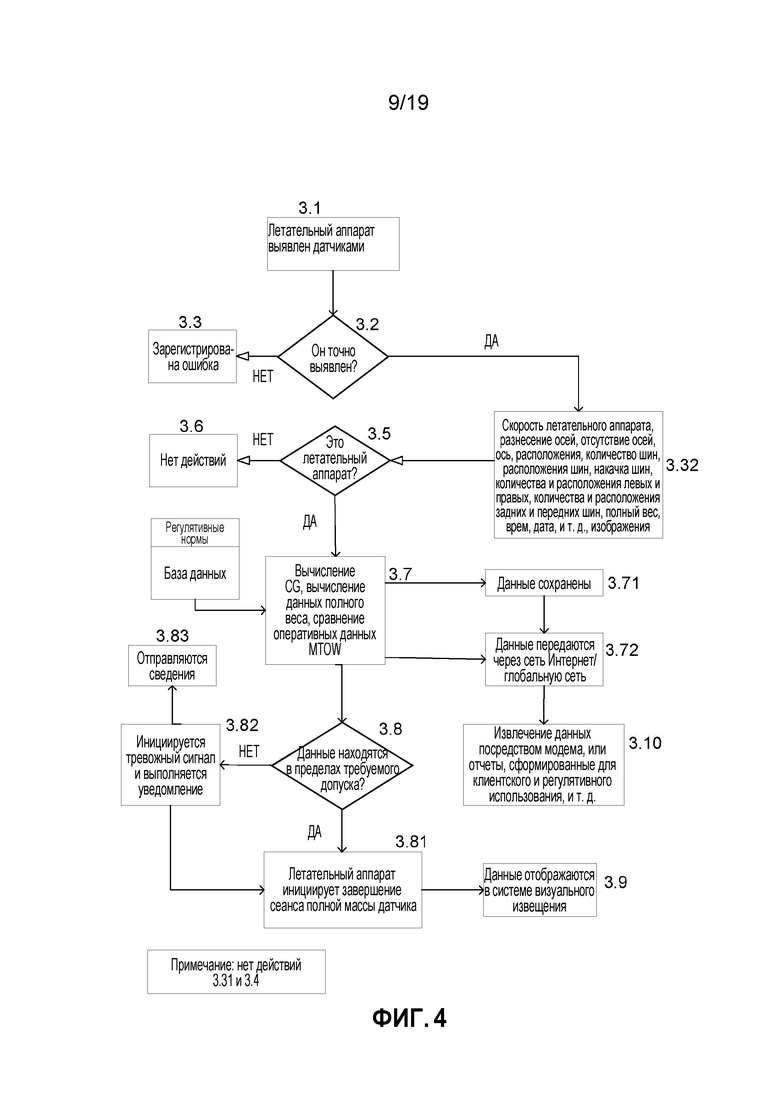
На фиг. 4 показана такая же последовательность операций, как на фиг. 3, за исключением того, что этапы 3.31 и 3.4 не включены в состав.
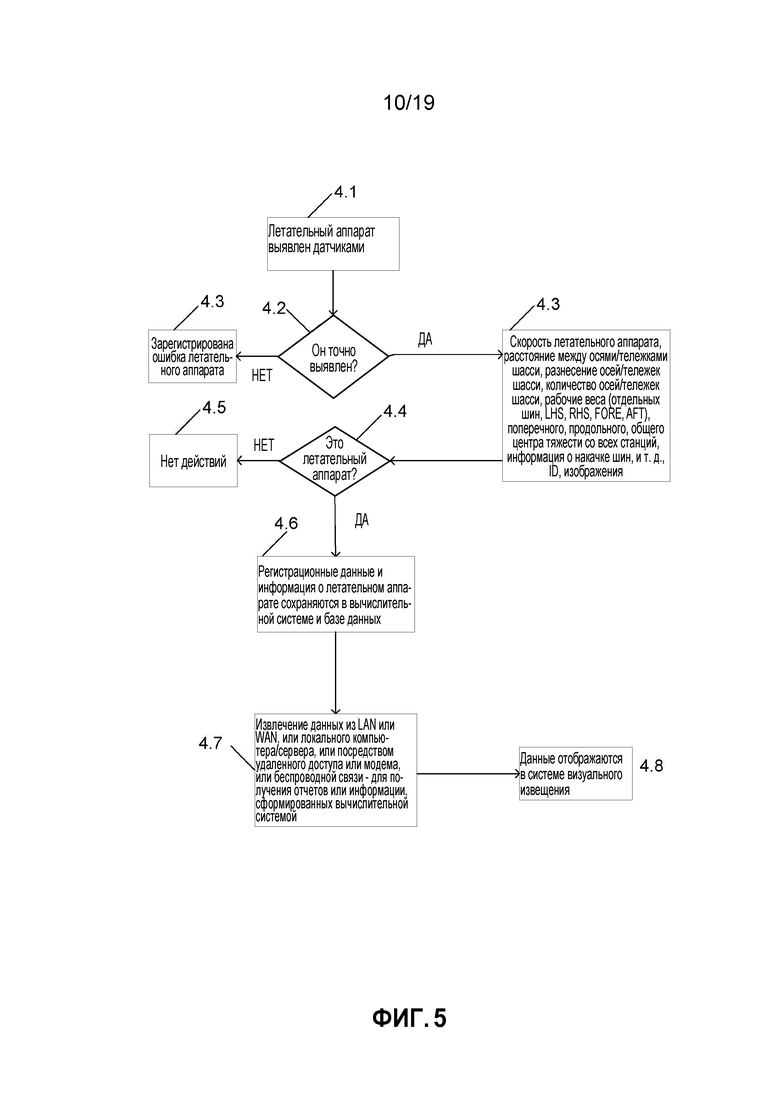
На фиг. 5, показана более изящная последовательность операций по сравнению с последовательностью операций, показанной на фиг. 3. Прежде всего, летательный аппарат выявляется датчиками (4.1). Затем выполняется оценка, точно ли выявлен летательный аппарат (4.2). Если нет, регистрируется ошибка (4.3). Если да, выполняются измерения, например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесения осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее (4.3).
Впоследствии, выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (4.4). Если нет, последовательность операций прекращается (4.5). Если да, измерения обрабатываются и сохраняются (4.6). Впоследствии, данные извлекаются для получения отчетов (4.7), и измеренные данные отображаются в системе визуального извещения (4.8).
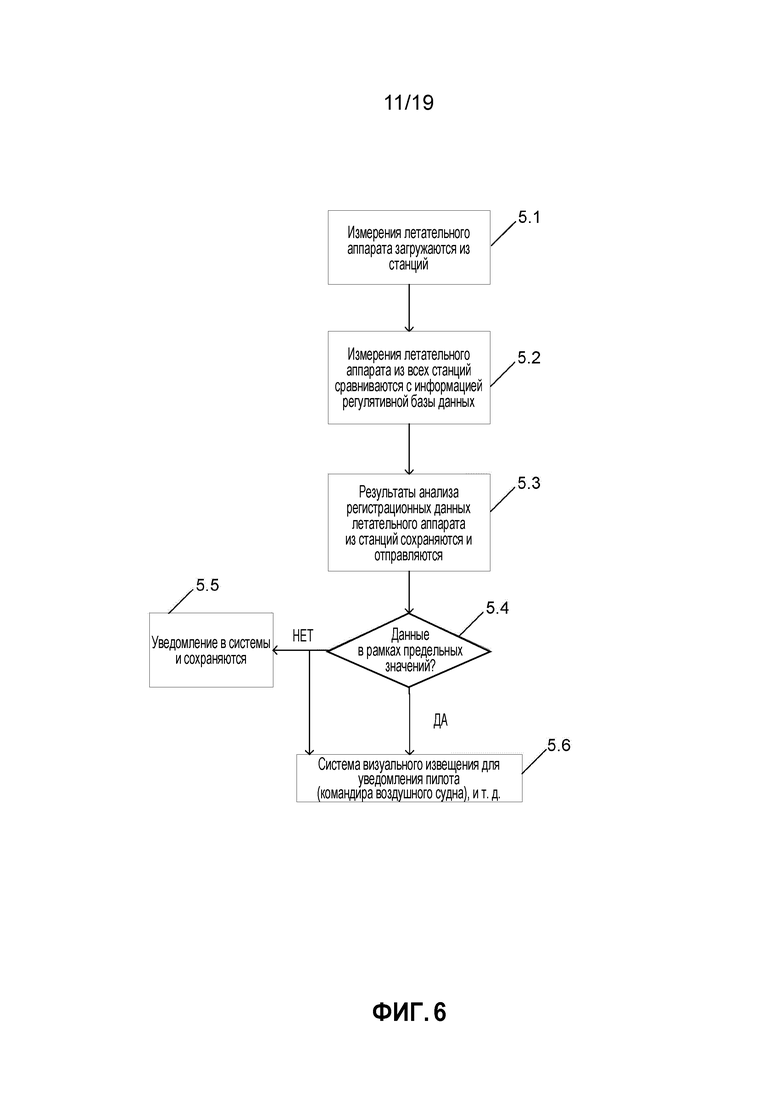
На фиг. 7, показан еще одна изящная последовательность операций по сравнению с последовательностью операций, показанной на фиг. 3. Прежде всего, измерения летательного аппарата загружаются с датчиков (5.1), и измерения впоследствии сравниваются с информацией от необходимых регуляторов (5.2). Результаты сравнения сохраняются и передаются (5.3), и затем выполняется оценка, чтобы определить, находятся ли данные в допустимых пределах (5.4). Если нет, отрицательное уведомление отправляется в систему визуального извещения (5.6) и сохраняется (5.5). Если да, положительное уведомление отправляется в систему визуального извещения (5.6).
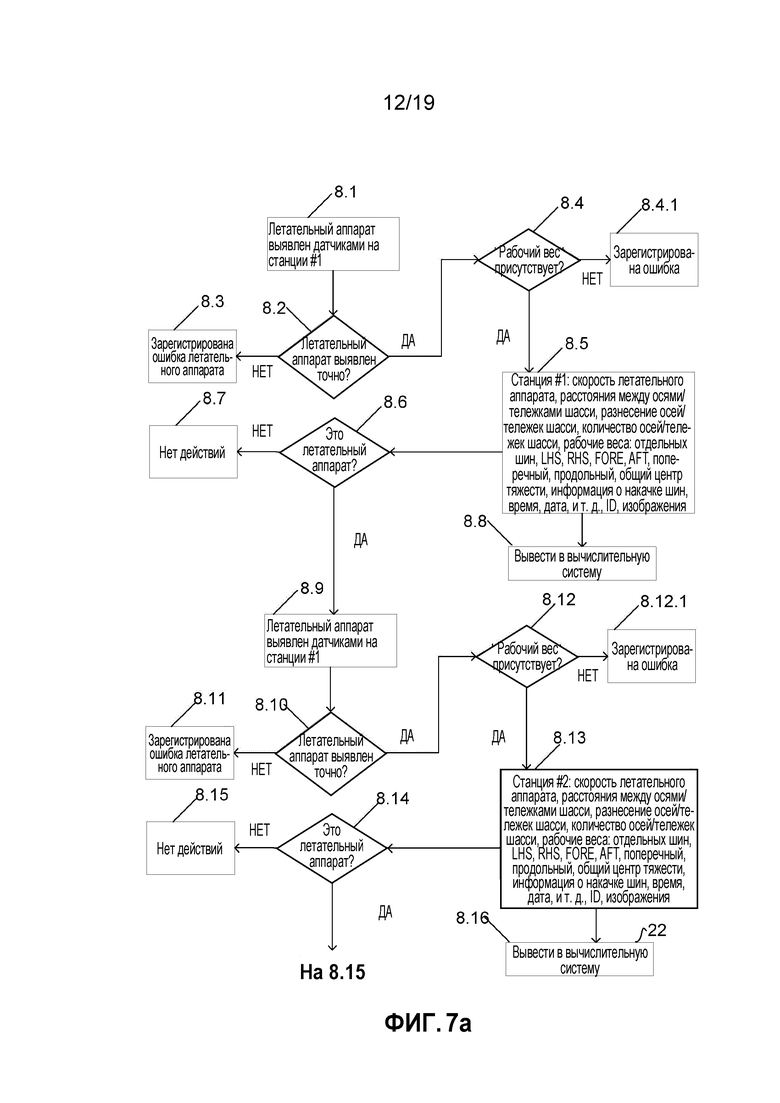
Со ссылкой на фиг. с 7a по 7b, показан ход последовательности операций системы, изображенной на фиг. 1a. Прежде всего, определяется, выявлен ли летательный аппарат на станции 1 (8.1). Затем выполняется оценка, точно ли выявлен летательный аппарат (8.2). Если нет, регистрируется ошибка (8.3). Если да, выполняется оценка, присутствует ли рабочий вес (8.4). Если нет, регистрируется ошибка (8.4.1). Если рабочий вес присутствует, на станции 1 выполняются измерения (8.5), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесения осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные затем выводятся в вычислительную систему (8.8).
Впоследствии, выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (8.6). Если нет, последовательность операций прекращается (8.7). Если да, летательный аппарат впоследствии выявляется на станции 2 (8.9). Затем выполняется оценка, точно ли выявлен летательный аппарат (8.10). Если нет, регистрируется ошибка (8.11). Если да, выполняется оценка, присутствует ли рабочий вес (8.12). Если нет, регистрируется ошибка (8.12.1). Если рабочий вес присутствует, на станции 2 выполняются измерения (8.13), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные затем выводятся в вычислительную систему (8.16).
Впоследствии, выполняется еще одна оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (8.14). Если нет, последовательность операций прекращается (8.17). Если да, летательный аппарат впоследствии выявляется на станции 3 (8.15). Затем выполняется оценка, точно ли выявлен летательный аппарат (8.16). Если нет, регистрируется ошибка (8.17). Если да, выполняется оценка, присутствует ли рабочий вес (8.18). Если нет, регистрируется ошибка (8.18.1). Если рабочий вес присутствует, на станции 3 выполняются измерения (8.19), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные затем выводятся в вычислительную систему (8.21).
Впоследствии, выполняется кроме того еще одна оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (8.20). Если нет, последовательность операций прекращается (8.21). Если да, летательный аппарат впоследствии выявляется на станции 4 (8.22). Затем выполняется оценка, точно ли выявлен летательный аппарат (8.23). Если нет, регистрируется ошибка (8.24). Если да, выполняется оценка, присутствует ли рабочий вес (8.25). Если нет, регистрируется ошибка (8.25.1). Если рабочий вес присутствует, на станции 4 выполняются измерения (8.26), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные затем выводятся в вычислительную систему (8.27). Заключительная оценка выполняется для определения, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (8.28). Если нет, последовательность операций прекращается (8.29). Если да, последний датчик инициирует завершение оценки (8.30), и уведомление выдается в вычислительную систему (8.31). Последним датчиком является контур и/или камера, или их комбинация, которые будут расположены на расчетном расстоянии от последнего устройства измерения весов и центровки рабочего веса. Точное расстояние будет рассчитано и выполнено с возможностью для установки на основании диапазона от 3 до 15 км/ч скорости перемещения летательного аппарата (без ускорения и замедления).
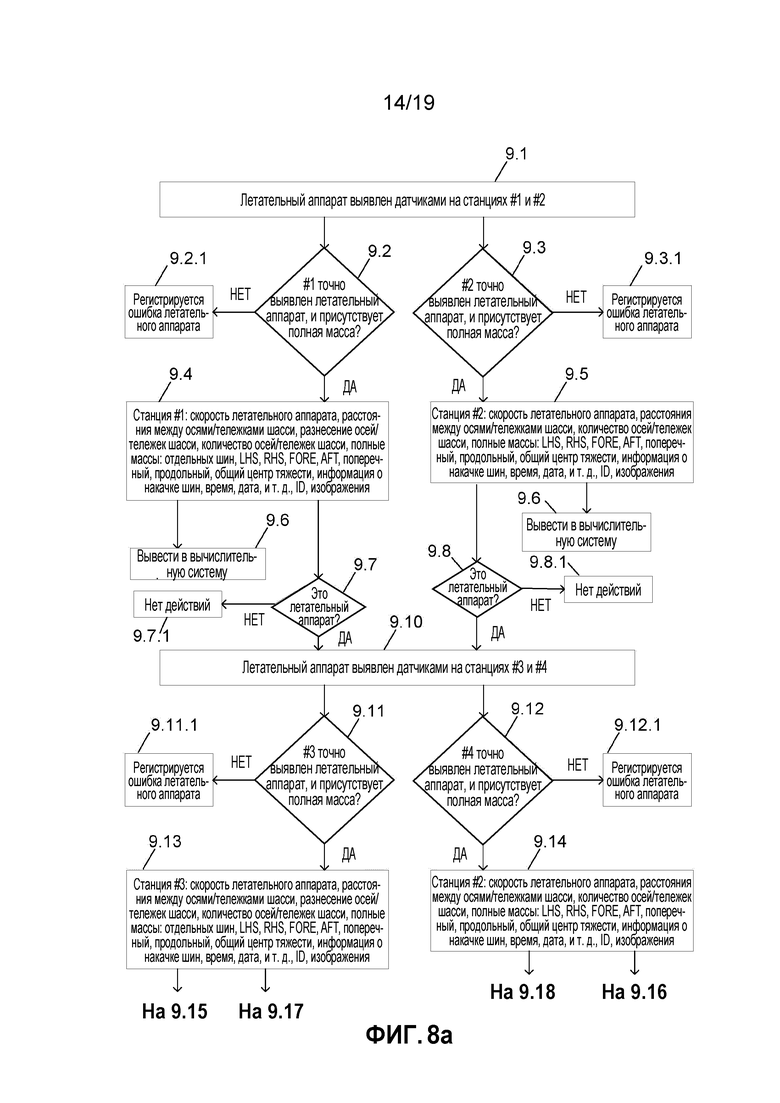
Со ссылкой на фиг. с 8a по 8b, показан ход последовательности операций системы, изображенной на фиг. 1b. Прежде всего, летательный аппарат выявляется на станциях 1 и 2 (9.1). Одновременно, станции 1 и 2 соответственно оценивают летательный аппарат и выявляют, присутствуют ли летательный аппарат и рабочий вес (9.2, 9.3). Если станция 1 не выявляет то или другое, регистрируется ошибка, и последовательность операций завершается (9.2.1). Если станция 2 не выявляет то или другое, регистрируется ошибка, и последовательность операций завершается (9.3.1).
Если обе станции 1 и 2 выявляют наличие летательного аппарата и рабочего веса, на каждой соответственной станции выполняются измерения (9.4, 9.5), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные с каждой станции затем выводятся в вычислительную систему (9.6).
Впоследствии, каждой станцией выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (9.7, 9.8). Если нет, последовательность операций прекращается (9.7.1, 9.8.1). Если да, летательный аппарат впоследствии выявляется на станциях 3 и 4 (9.10). Одновременно, станции 3 и 4 соответственно оценивают летательный аппарат и выявляют, присутствуют ли летательный аппарат и рабочий вес (9.11, 9.12). Если станция 3 не выявляет то или другое, регистрируется ошибка, и последовательность операций завершается (9.11.1). Если станция 4 не выявляет то или другое, регистрируется ошибка, и последовательность операций завершается (9.12.1).
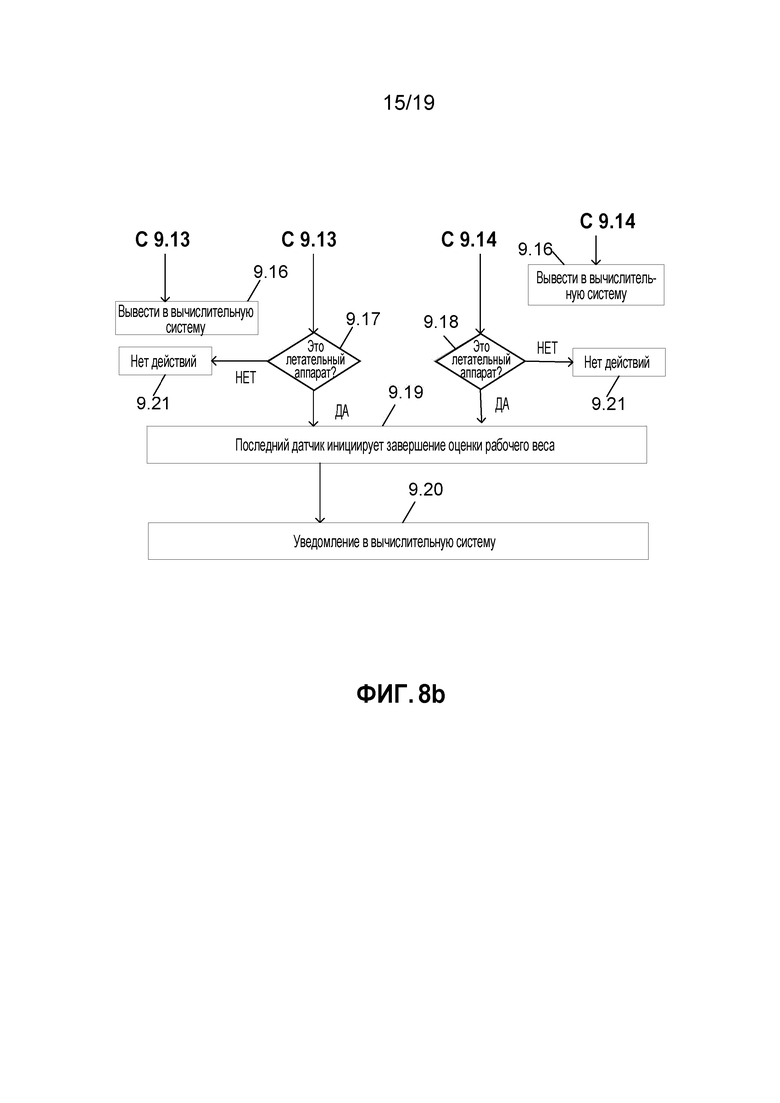
Если обе станции 3 и 4 выявляют наличие летательного аппарата и рабочего веса, на каждой соответственной станции выполняются измерения (9.13, 9.14), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные с каждой станции затем выводятся в вычислительную систему (9.16).
Заключительная оценка выполняется на каждой станции 3 и 4 для определения, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (9.17, 9.18). Если нет, последовательность операций прекращается (9.21). Если да, последний датчик инициирует завершение оценки (9.19), и уведомление выдается в вычислительную систему (9.20). Последним датчиком является контур и/или камера, или их комбинация, которые будут расположены на расчетном расстоянии от последнего устройства измерения весов и центровки рабочего веса. Точное расстояние будет рассчитано и выполнено с возможностью для установки на основании диапазона от 3 до 15 км/ч скорости перемещения летательного аппарата (без ускорения и замедления).
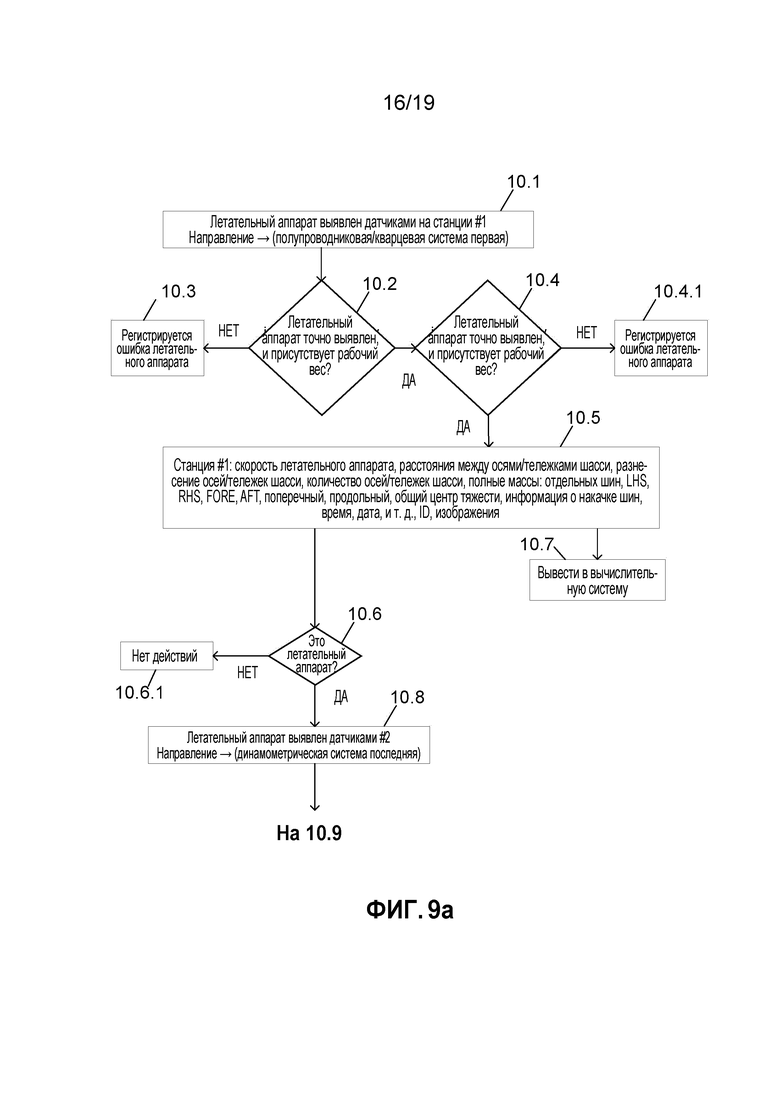
Со ссылкой на фиг. с 9a по 9b, показан ход последовательности операций системы, изображенной на фиг. 1c. Прежде всего, летательный аппарат выявляется на станции 1, сначала полупроводниковыми датчиками, сопровождаемыми кварцевыми датчиками (10.1). Полупроводниковые датчики оценивают летательный аппарат и выявляют, присутствуют ли летательный аппарат и рабочий вес (10.2). Если полупроводниковые датчики не выявляют то или другое, регистрируется ошибка, и последовательность операций завершается (10.3). Если полупроводниковые датчики оба выявляют, кварцевые датчики затем оценивают летательный аппарат и выявляют, присутствуют ли летательный аппарат и рабочий вес (10.4). Если кварцевые датчики не выявляют то или другое, регистрируется ошибка, и последовательность операций завершается (10.4.1). Если кварцевые датчики оба выявляют, на станции 1 выполняются измерения (10.5), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные со станции 1 затем выводятся в вычислительную систему (10.7).
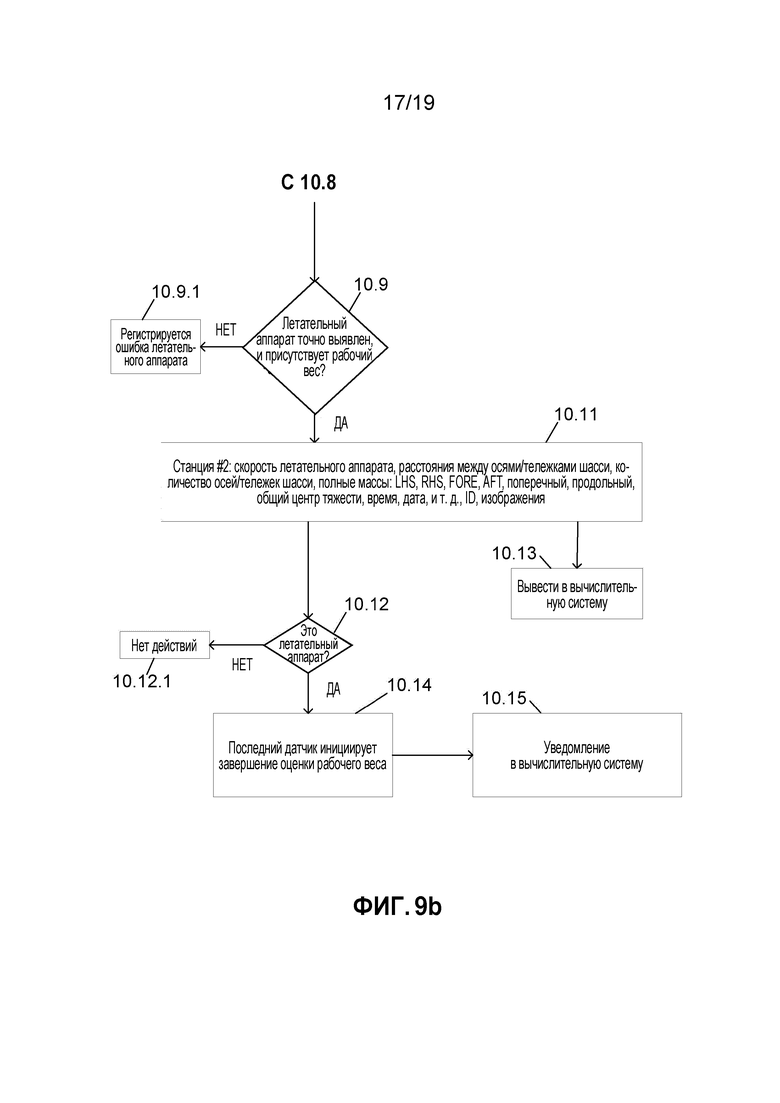
Впоследствии, станцией 1 выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (10.6). Если нет, последовательность операций прекращается (10.6.1). Если да, летательный аппарат впоследствии выявляется датчиками силы (10.8). Датчики силы затем оценивают летательный аппарат и выявляют, присутствуют ли летательный аппарат и рабочий вес (10.9). Если нет, последовательность операций прекращается (10.9.1). Если да, летательный аппарат впоследствии выявляется на станции 2 (10.11). На станции 2 выполняются измерения, например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные со станции 2 затем выводятся в вычислительную систему (10.13).
Заключительная оценка выполняется на станции 2 для определения, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (10.12). Если нет, последовательность операций прекращается (10.12.1). Если да, последний датчик инициирует завершение оценки (10.14), и уведомление выдается в вычислительную систему (10.15). Последним датчиком является контур и/или камера, или их комбинация, которые будут расположены на расчетном расстоянии от последнего устройства измерения весов и центровки рабочего веса. Точное расстояние будет рассчитано и выполнено с возможностью для установки на основании диапазона от 3 до 15 км/ч скорости перемещения летательного аппарата (без ускорения и замедления).
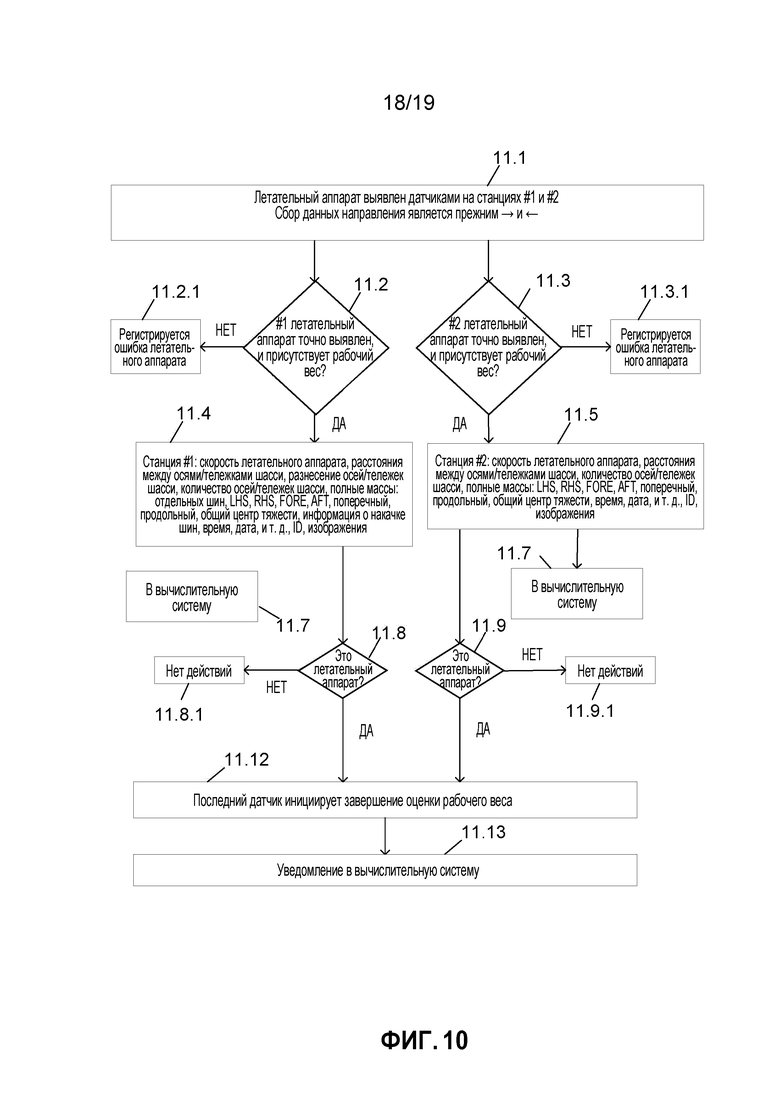
Со ссылкой на фиг. 10, приведен ход последовательности операций системы, изображенной на фиг. 1d. Прежде всего, летательный аппарат выявляется на станциях 1 и 2 (11.1). Одновременно, станции 1 и 2 соответственно оценивают летательный аппарат и выявляют, присутствуют ли летательный аппарат и рабочий вес (11.2, 11.3). Если станция 1 не выявляет то или другое, регистрируется ошибка, и последовательность операций прекращается (11.2.1). Если станция 2 не выявляет то или другое, регистрируется ошибка, и последовательность операций завершается (11.3.1).
Если обе станции 1 и 2 выявляют наличие летательного аппарата и рабочего веса, на каждой соответственной станции выполняются измерения (11.4, 11.5), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесение осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные с каждой станции затем выводятся в вычислительную систему (11.7).
Впоследствии, каждой станцией выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (11.8, 11.9). Если нет, последовательность операций прекращается (11.8.1, 11.9.1). Если да, последний датчик инициирует завершение оценки (11.12), и уведомление выдается в вычислительную систему (11.13). Последним датчиком является контур и/или камера, или их комбинация, которые будут расположены на расчетном расстоянии от последнего устройства измерения весов и центровки рабочего веса. Точное расстояние будет рассчитано и выполнено с возможностью для установки на основании диапазона от 3 до 15 км/ч скорости перемещения летательного аппарата (без ускорения и замедления).
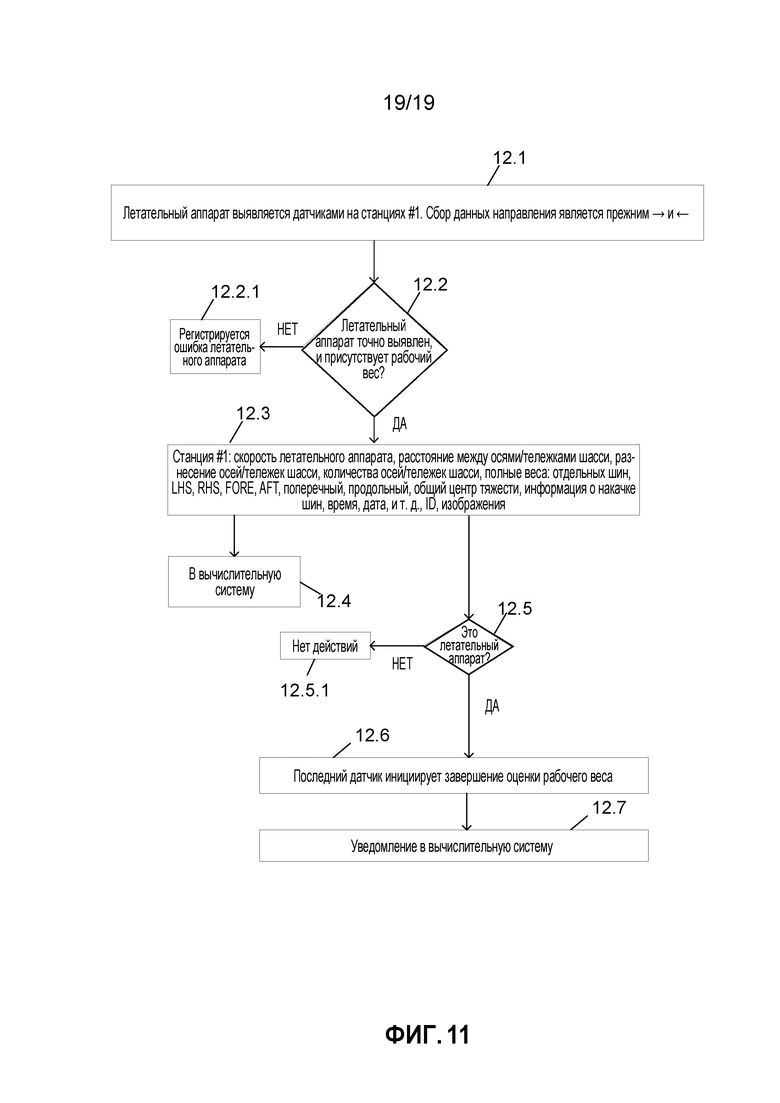
Со ссылкой на фиг. 11, показан ход последовательности операций системы, изображенной на фиг. 1e/f. Прежде всего, определяется, выявлен ли летательный аппарат на станции 1 (12.1). Затем выполняется оценка, точно ли выявлен летательный аппарат и применительно к рабочему весу (12.2). Если нет, регистрируется ошибка (12.2.1). Если да, на станции 1 выполняются измерения (12.3), например, скорости летательного аппарата, расстояния между осями/тележками шасси, разнесения осей/тележек шасси, количества осей/тележек шасси, рабочих весов отдельных шин, LHS, RHS, FORE, AFT, поперечного, продольного, общего центра тяжести, информации о накачке шин, времени, даты, ID, изображений, и так далее. Обработанные данные затем выводятся в вычислительную систему (12.4).
Впоследствии, выполняется оценка, действительно ли выявленный летательный аппарат является летательным аппаратом или некоторым другим транспортным средством/объектом (12.5). Если нет, последовательность операций прекращается (12.5.1). Если да, последний датчик инициирует завершение оценки (12.6), и уведомление выдается в вычислительную систему (11.13). Последним датчиком является контур и/или камера, или их комбинация, которые будут расположены на расчетном расстоянии от последнего устройства измерения весов и центровки рабочего веса. Точное расстояние будет рассчитано и выполнено с возможностью для установки на основании диапазона от 3 до 15 км/ч скорости перемещения летательного аппарата (без ускорения и замедления).
Следует отметить, что вышеупомянутые варианты осуществления делают возможной точность 0,05% при взвешивании летательного аппарата, когда неподвижен, и точность 0,5% при взвешивании летательного аппарата в динамике (вплоть до скоростей в 15 км/ч). В этом отношении, точность сильно желательна.
Следует отметить, что в вышеупомянутых системах резервирование, целостность, а также точность улучшается посредством увеличения количества датчиков. Более того, большее количество датчиков также ограничивает время простоя, когда возникает неисправность, так как будут резервные датчики для выполнения функциональных требований, и может давать возможность технического обслуживания и ремонта с использованием заранее запланированного расписания.
Следует принимать во внимание, что вышеупомянутые системы установлены в перроне рулежной дорожки/взлетно-посадочной полосы, а не в действующей взлетно-посадочной полосе.
Также предусмотрен способ определения пошлины и/или посадочного сбора, взимаемых с летательного аппарата, пошлина и/или посадочный сбор взимаются за использование места проведения посадки летательных аппаратов.
Посадочный сбор может зависеть от длительности, которую летательный аппарат остается на месте проведения посадки летательных аппаратов. Способ содержит измерение параметров летательного аппарата в реальном времени; и определение пошлины и/или посадочного сбора с летательного аппарата на основании параметров летательного аппарата в реальном времени.
Параметры в реальном времени могут использоваться для расчета пошлины, например, взимаемой на основании однократного сбора (на основе расчета и оплаты), по тарифу за количественно определяемые вес/загрузку, согласно заданному общему среднему тарифу по весу/загрузке в среднем на аэропорт за количественно определяемые вес/загрузку, проходящие через систему контроля рабочего веса, любым другим способом, согласованным со службами аэропорта/авиакомпании, и могут быть основой оплаты по факту использования, ежедневно, еженедельно, ежемесячно, за квартал или ежегодно, ежедневной суммой, которую авиакомпания платит независимо от того, сколько весит летательный аппарат, и так далее.
Параметры в реальном времени также могут использоваться для расчета посадочного сбора, например, взимаемого на основании однократного сбора (на основе начала периода), на основе продолжительности времени, рассчитанной с момента времени, когда летательный аппарат проходит систему контроля рабочего веса, любым другим способом, согласованным со службами аэропорта/авиакомпании, и так далее.
Следует принимать во внимание, что измерение параметров летательного аппарата в реальном времени может использовать системы и способы, как описанные в предыдущих параграфах, или даже другие системы и способы.
Несмотря на то, что в вышеизложенном описании были описаны предпочтительные варианты осуществления настоящего изобретения, специалистам в данной области техники будет понятно, что многие изменения или модификации деталей исполнения или конструкции могут быть произведены, не отходя от настоящего изобретения.


Группа изобретений относится к двум вариантам системы определения параметров летательного аппарата в реальном времени, проходящего по поверхности рулежной дорожки, способам определения пошлины и посадочного сбора, взимаемых с летательного аппарата. Система по первому варианту содержит не менее двух измерительных устройств с датчиками, встроенными в поверхность грунта на расстоянии, определенным типом летательного аппарата, устройство обработки данных. Система по второму варианту отличается от вышеуказанной тем, что выполнена с возможностью определения присутствия летательного аппарата, его типа, полной массы, центра тяжести, максимальной взлетной массы. Пошлину, взимаемую с летательного аппарата, определяют на основании полученных параметров летательного аппарата, а для определения посадочного сбора дополнительно измеряют длительность его нахождения на месте посадки. Обеспечивается оперативная взаимная перекрестная проверка, контроль с выработкой предупреждений о весах и центровках летательного аппарата, возможность определения пошлин, взимаемых с летательных аппаратов. 4 н. и 18 з.п. ф-лы, 11 ил.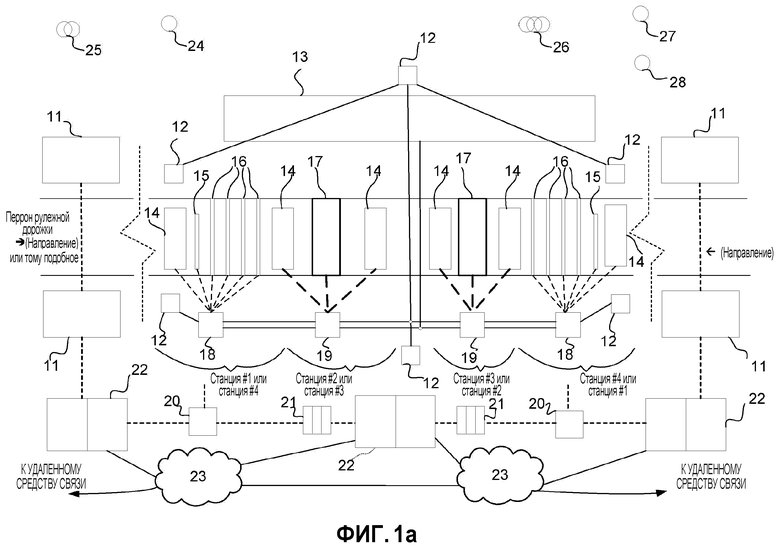
1. Система для определения параметров в реальном времени летательного аппарата, проходящего по поверхности рулежной дорожки, содержащая:
по меньшей мере два датчика присутствия, размещенных вдоль указанной поверхности;
множество промежуточных датчиков, размещенных между указанными по меньшей мере двумя датчиками присутствия, и
по меньшей мере одно устройство обработки для обработки данных, принятых из датчиков присутствия и промежуточных датчиков,
при этом по меньшей мере одно устройство обработки формирует упомянутые параметры в реальном времени летательного аппарата на основании инициирования одного или более датчика присутствия и данных, принятых из упомянутого множества промежуточных датчиков; и
при этом по меньшей мере некоторые параметры в реальном времени относятся в весу и балансу летательного аппарата, и
при этом параметры в реальном времени определяют пошлину, взимаемую с летательного аппарата, причем пошлина взимается за использование места проведения посадки летательных аппаратов.
2. Система по п. 1, в которой встроенные в поверхность грунта датчики содержат датчики веса.
3. Система по п. 1 или 2, дополнительно включающая в себя датчики формирования изображений, выполненные с возможностью идентификации летательного аппарата.
4. Система по любому из пп. 1-3, в которой упомянутые по меньшей мере два датчика расположены в ряд, чтобы делать возможным определение присутствия летательного аппарата, эшелонирования летательных аппаратов, измерения скорости и классификации летательных аппаратов.
5. Система по любому из пп. 1-4, дополнительно включающая в себя по меньшей мере одну метеорологическую станцию, причем упомянутая по меньшей мере одна метеорологическая станция предназначена получать по меньшей мере один относящийся к погоде параметр, выбранный из группы, состоящей из кажущейся скорости ветра, направления ветра, температуры воздуха, температуры покрытия, относительной влажности, влажности покрытия, барометрического давления, теплового индекса, охлаждения ветром, измерителя высоты облаков, поперечной и продольной тяги ветра и плотности воздуха.
6. Система по любому из пп. 1-5, дополнительно включающая в себя устройство визуального отображения, выполненное с возможностью указывать параметры летательного аппарата в реальном времени.
7. Система по любому из пп. 1-6, в которой упомянутое по меньшей мере одно устройство обработки выполнено с возможностью выполнять по меньшей мере одну из следующих задач: выявление контура, выявление направления, выявление скорости, выявление силы на основании частоты, получение скорости, определение ускорения летательного аппарата, определение замедления летательного аппарата, компенсация входных сигналов по внешним параметрам, формирование входных сигналов по внешним параметрам и линеаризация входных сигналов по внешним параметрам.
8. Система по любому из пп. 1-7, в которой параметры в реальном времени выбраны из группы, состоящей из:
(a) веса, массы/силы на отдельных шинах летательного аппарата;
(b) веса, массы/силы на всех отдельных тележках шасси/осях;
(c) суммарного поперечного веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(d) суммарного продольного веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(e) общего суммарного веса, массы/силы на всех шинах/тележках шасси/осях;
(f) поперечного распределения веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(g) продольного распределения веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(h) максимального взлетного веса, массы/силы;
(i) продольного центра тяжести;
(j) поперечного центра тяжести;
(k) общего центра тяжести;
(l) выявления шины;
(m) скорости летательного аппарата;
(n) подтверждения постоянной скорости летательного аппарата;
(o) неравномерности накачки шин;
(p) идентификационного признака, относящегося к летательному аппарату;
(q) информации о поперечной центровке и распределении загрузки летательного аппарата;
(r) информации о продольной центровке и распределении загрузки летательного аппарата; и
(s) информации о центровке и распределении загрузки летательного аппарата.
9. Система для определения параметров в реальном времени, включающая в себя:
(a) по меньшей мере два измерительных устройства, причем каждое из упомянутых по меньшей мере двух измерительных устройств включает в себя множество встроенных в поверхность грунта датчиков; и
(b) по меньшей мере одно устройство обработки, выполненное с возможностью выполнять этапы, на которых:
(i) принимают данные из упомянутых по меньшей мере двух измерительных устройств;
(ii) определяют по упомянутым данным, присутствует ли рабочий вес;
(iii) если рабочий вес присутствует, то определяют, присутствует ли летательный аппарат;
(iv) если летательный аппарат присутствует, то определяют:
(A) тип летательного аппарата;
(B) центр тяжести летательного аппарата;
(C) полную массу летательного аппарата; и
(D) максимальную взлетную массу,
(v) определяют, находятся ли центр тяжести, полная масса и максимальная взлетная масса в пределах требуемых допущений.
10. Система по п. 9, выполненная с возможностью выполнять этапы, на которых:
(a) отправляют данные, представляющие то, что центр тяжести, полная масса и максимальная взлетная масса находятся в пределах требуемых допущений.
11. Система по п. 10, в которой встроенные в поверхность грунта датчики содержат:
датчики веса; и
датчики присутствия.
12. Система по п. 9 или 10, в которой каждое из измерительных устройств дополнительно включает в себя датчики формирования изображений, выполненные с возможностью идентификации летательного аппарата.
13. Система по любому из пп. 9-12, в которой упомянутые по меньшей мере два измерительных устройства расположены в ряд, чтобы делать возможным определение присутствия летательного аппарата, эшелонирования летательных аппаратов, измерения скорости и классификации летательных аппаратов.
14. Система по любому из пп. 9-13, дополнительно включающая в себя по меньшей мере одну метеорологическую станцию, причем упомянутая по меньшей мере одна метеорологическая станция предназначена получать по меньшей мере один относящийся к погоде параметр, выбранный из группы, состоящей из кажущейся скорости ветра, направления ветра, температуры воздуха, температуры покрытия, относительной влажности, влажности покрытия, барометрического давления, теплового индекса, охлаждения ветром, измерителя высоты облаков, поперечной и продольной тяги ветра и плотности воздуха.
15. Система по любому из пп. 9-14, дополнительно включающая в себя устройство визуального отображения, выполненное с возможностью указывать параметры летательного аппарата в реальном времени.
16. Система по любому из пп. 9-15, в которой упомянутое по меньшей мере одно устройство обработки выполнено с возможностью выполнять по меньшей мере одну из следующих задач: выявление контура, выявление направления, выявление скорости, выявление силы на основании частоты, получение скорости, определение ускорения летательного аппарата, определение замедления летательного аппарата, компенсация входных сигналов по внешним параметрам, формирование входных сигналов по внешним параметрам и линеаризация входных сигналов по внешним параметрам.
17. Система по любому из пп. 9-16, в которой параметры в реальном времени выбраны из группы, состоящей из:
(a) веса, массы/силы на отдельных шинах летательного аппарата;
(b) веса, массы/силы на всех отдельных тележках шасси/осях;
(c) суммарного поперечного веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(d) суммарного продольного веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(e) общего суммарного веса, массы/силы на всех шинах/тележках шасси/осях;
(f) поперечного распределения веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(g) продольного распределения веса, массы/силы на шине(ах)/тележке(ах) шасси/оси(ях);
(h) максимального взлетного веса, массы/силы;
(i) продольного центра тяжести;
(j) поперечного центра тяжести;
(k) общего центра тяжести;
(l) выявление шины;
(m) скорости летательного аппарата;
(n) подтверждения постоянной скорости летательного аппарата;
(o) неравномерности накачки шин;
(p) идентификационного признака, относящегося к летательному аппарату;
(q) информации о поперечной центровке и распределении загрузки летательного аппарата;
(r) информации о продольной центровке и распределении загрузки летательного аппарата; и
(s) информации о центровке и распределении загрузки летательного аппарата.
18. Система по любому из пп. 9-17, в которой параметры в реальном времени определяют пошлину, взимаемую с летательного аппарата, причем пошлина взимается за использование места проведения посадки летательных аппаратов.
19. Способ определения пошлины, взимаемой с летательного аппарата, причем пошлина взимается за использование места проведения посадки летательных аппаратов, содержащий этапы, на которых:
измеряют параметры летательного аппарата в реальном времени; и
определяют пошлину с летательного аппарата на основании параметров летательного аппарата в реальном времени.
20. Способ по п. 19, в котором измерение параметров летательного аппарата в реальном времени осуществляют с использованием системы по пп. 1-8 или пп. 9-18.
21. Способ определения посадочного сбора, взимаемого с летательного аппарата, причем посадочный сбор взимается за использование места проведения посадки летательных аппаратов, содержащий этапы, на которых:
измеряют параметры летательного аппарата в реальном времени; и
определяют посадочный сбор с летательного аппарата на основании длительности, в течение которой летательный аппарат находится на месте проведения посадки летательных аппаратов, причем длительность измеряют от момента, когда измерялись параметры летательного аппарата в реальном времени.
22. Способ по п. 21, в котором измерение параметров летательного аппарата в реальном времени осуществляют с использованием системы по пп. 1-8 или пп. 9-18.
| US 4163283 A1, 31.07.1979 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АКТИВНОСТИ Н СЕЛЕКТИВНОСТИ АЛЮМОСИЛИКАТНОГО КАТАЛИЗАТОРА КРЕКИНГА | 0 |
|
SU245030A1 |
| US 6462697 B1, 08.10.2002 | |||
| US 5214586 A1, 25.05.1993 | |||
| US 4122522 A1, 24.10.1978 | |||
| Захват для листовой стали | 1960 |
|
SU131480A1 |

