Изобретение относится к способам навигации по Спутниковым Радионавигационным Системам (СРНС) и может быть использовано для идентификации параметров навигационных спутников и повышения точности определения координат навигационного приемника.
Технический результат заключается в повышении точности определения координат навигационного приемника и навигационных спутников за счет исключения погрешностей взаимной синхронизации часов навигационного приемника и навигационных спутников, инструментальных погрешностей передатчиков и приемников спутников, а также за счет определения расстояний между спутниками.
Известны различные способы повышения точности определения координат навигационного приемника. В [патент США № 7535414] изложен способ, который предполагает, что перед вычислением координат навигационного приемника производится разрешение неопределенностей, вызванных в т.ч. ошибками часов навигационных спутников, в неполных псевдодальностях. В [патент США № 6417801] предлагается разрешение неопределенностей в неполных псевдодальностях путем добавления в вектор оцениваемых параметров поправки ко времени измерения с последующим перебором всех допустимых целочисленных комбинаций неоднозначностей и выбором нужной из них по критерию минимума остаточных невязок.
Также для повышения точности определения координат навигационного приемника используются различные алгоритмы компенсации погрешностей часов [Интерфейсный контрольный документ ГЛОНАСС (5.1 редакция). - М.: РНИИ КП, 2008. - 57 с.], а также применяется дифференциальный режим измерений по кодовым дальностям, реализуемый с помощью контрольного навигационного приемника с известными географическими координатами - т.н. базовой станции [Bar-Sever, Y. A new Massachusetts model for GPS yaw attitude // Journal of Geodesy, 70, 714723, 1996]. Недостатками данных способов являются сложность их реализации и невозможность точного определения текущих значений ошибок взаимной синхронизации часов навигационных спутников и навигационного приемника, а также инструментальных погрешностей передатчиков и приемников спутников, для их последующей компенсации.
Наиболее близким к предлагаемому изобретению является способ, описанный в [патент РФ №2432584. Способ определения координат навигационного приемника спутниковой радионавигационной системы / Васильев М.В., Михайлов Н.В., Поспелов С.С., Джалали Биджан], состоящий в том, что вычисление поправок к координатам приемника производится после измерения псевдодальностей и псевдоскоростей по невязкам псевдодальностей.
Недостатком данного способа является также сложность аппаратной и вычислительной реализации и невозможность точного определения текущих значений ошибок взаимной синхронизации часов навигационных спутников и навигационного приемника, а также инструментальных погрешностей передатчиков и приемников спутников, для их последующей компенсации.
Заявленное изобретение направлено на решение задачи повышения точности определения местоположения навигационного приемника за счет коррекции и учета погрешности взаимной синхронизации часов навигационных спутников, а также инструментальных погрешностей передатчиков спутников.
Поставленная задача возникает при разработке систем контроля и управления навигационными спутниками, а также использования их измерений для решения навигационной задачи объекта.
Для обеспечения определения параметров навигационных спутников с компенсацией погрешностей навигационного приемника и упрощения аппаратной и вычислительной реализации данной процедуры предлагается способ, состоящий в том, что в группе из семи навигационных спутников, число которых определено из условия равенства числа измеренных межспутниковых дальностей при обоюдном измерении расстояний между двумя спутниками числу неизвестных параметров спутников: истинных дальностей между спутниками, погрешностей взаимной синхронизации часов спутников, инструментальных погрешностей передатчиков и приемников спутников, реализуются одновременные передача навигационных сообщений от каждого спутника к каждому и их прием каждым спутником от каждого, определение межспутниковых псевдодальностей и их передача на все спутники группировки с последующим решением на каждом спутнике сорока одного линейного алгебраического уравнения, число которых определяется числом неизвестных определяемых параметров: двадцатью одной истинной межспутниковой дальностью, шестью погрешностями взаимной синхронизации часов семи спутников, семью инструментальными погрешностями передатчиков и семью инструментальными погрешностями приемников семи спутников, и каждое из которых представляет собой линейную зависимость псевдодальности между соответствующими двумя спутниками от истинной дальности между ними, погрешности взаимной синхронизации их часов и инструментальных погрешностей их передатчиков и приемников; в результате решения данных линейных уравнений на каждом спутнике определяются истинные дальности между спутниками, погрешности взаимной синхронизации часов спутников, инструментальные погрешности передатчиков и приемников спутников, после чего погрешности взаимной синхронизации часов спутников и инструментальные погрешности их передатчиков передаются в навигационных сообщениях и компенсируются в навигационном приемнике объекта при определении его координат, осуществляемом на основе решения итеративными методами системы не менее трех нелинейных уравнений, каждое из которых сформировано по разности измеренных псевдодальностей между объектом и двумя спутниками группировки и представляет собой радикально-квадратичную зависимость разности истинных дальностей между объектом и двумя спутниками группировки от координат объекта в гринвичской системе координат.
Точность решения навигационной задачи с использованием средств спутниковой навигации в значительной мере зависит от степени подавления помех, возникающих при приеме-передаче спутниковых сообщений. В общем случае информационная структура спутникового измерения псевдодальности ZR, используемого в качестве основного сигнала при позиционировании объектов, с учетом помех, в наибольшей степени влияющих на точность позиционирования, имеет вид:

где ξc, ηc, ζc - текущие координаты спутника в гринвичской системе координат (ГрСК),
ξ, η, ζ - текущие координаты объекта в ГрСК,
С - номинальное значение скорости света в вакууме,
Δτ - погрешность часов навигационного приемника,
ΔT - погрешность часов спутника,
WИТ - погрешности, обусловленные прохождением радиосигнала через ионосферу и тропосферу,
WП - инструментальные погрешности навигационного приемника объекта,
WS - инструментальные погрешности передатчика спутника.
Среди перечисленных погрешностей наиболее значительный удельный вес имеют инструментальные погрешности передатчика спутника и ошибки часов спутника и приемника. Так, например, несмотря на установку атомных часов на навигационных спутниках, среднеквадратическое значение ошибки взаимной синхронизации бортовых шкал времени может достигать 20 и более нс [ГЛОНАСС. Интерфейсный контрольный документ / Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением (Редакция 5.1). 2008. - 74 с.].
В настоящее время для компенсации погрешности часов применяются различные алгоритмы, построенные на основе ее аппроксимации временными полиномами. Например, в СНС ГЛОНАСС ошибка часов спутника ΔT аппроксимируется линейной зависимостью от времени с заданными параметрами (в GPS применяется квадратичная зависимость):

где t* - время расчета погрешности на момент поступления спутниковой информации,
α0, α1 - известные параметры модели ошибки часов спутника,
ТГ - время задержки спутникового сигнала,
ТР - релятивистская поправка, определяемая в процессе вычисления координат спутника.
Как видно из (2), компенсационная модель содержит 4(!) параметра, требующих дополнительного непростого их определения с различной периодичностью, снижающего общую эффективность применения модели (2). При этом алгоритмы компенсации инструментальных погрешностей передатчика спутника в настоящее время вообще отсутствуют.
Существующие навигационные системы ГЛОНАСС и GPS с целью повышения точности решения навигационной задачи проходят в настоящий момент усиленную модернизацию, позволяющую, в частности, определять с помощью бортовых измерительных средств расстояния между спутниками, находящимися в зоне прямой видимости.
Так, например, навигационные спутники ГЛОНАСС-М оснащаются бортовой аппаратурой межспутниковых измерений [ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. - 3-е изд., перераб. - М.: Радиотехника, 2005. - 688 с.], а навигационные спутники ГЛОНАСС-К - приемоформирующим устройством межспутниковой радиолинии [Ступак Г.Г., Ревнивых С.Г., Игнатович Е.И., Куршин В.В., Бетанов В.В., Панов С.С., Бондарев Н.З., Чеботарев В.Е., Решетнева М.Ф., Балашова Н.Н., Сердюков А.И., Синцова Л.Н. // Выбор структуры орбитальной группировки перспективной системы ГЛОНАС // Космонавтика №3-4 (6) 2013, С. 4-11.]. Формирующая часть устройства межспутниковой радиолинии осуществляет формирование и излучение информационно-измерительных радиосигналов, структура которых аналогична структуре навигационного сигнала ГЛОНАСС. В приемной части осуществляется усиление радиосигналов и измерение псевдоскорости и псевдодальности между навигационными спутниками системы ГЛОНАСС и выделение цифровой информации из принимаемого информационно-измерительного сигнала.
Повышение точности определения положения навигационных спутников возможно также при использовании лазерных дальномеров [Чубыкин А.А., Рой Ю.А., Корнишев О.М., Падун П.П. Использование бортовых лазерных измерительно-связных средств для повышения точности и оперативности ЭВО спутников системы ГЛОНАСС // ЭВ & ЭС. Т. 12. 2007. С. 25-30, Шаргородский В.Д., Чубыкин А.А., Сумерин В.В. Межспутниковая лазерная навигационно-связная система // Аэрокосмический курьер. 2007. №1 (49). С. 88-89], в основе которого лежит принцип измерения времени распространения лазерных импульсов.
При этом очевидно, что сигналы измерения псевдодальностей между i-м и j-м спутниками будут свободны от погрешностей, обусловленных прохождением сигнала через ионосферу и тропосферу как в (1), и будут иметь вид:

где Zij - псевдодальность, измеренная на j-м спутнике,
Rij - истинная дальность между i-м и j-м спутниками,
ΔTj - погрешность часов j-го спутника,
ΔTi - погрешность часов i-го спутника,
WSi - погрешность передатчика i-го спутника,
WПj - погрешность приемника j-го спутника,
ΔTji=с(ΔTj-ΔTi) - ошибка взаимной синхронизации часов i-го и j-го спутников.
Предварительно определим число спутников N, необходимое и достаточное для полного определения пространственно-временных параметров спутников. Число всех возможных расстояний между N спутниками (равное числу ребер графа с N вершинами) определяется известным выражением: N(N-1)/2. При обоюдном измерении расстояний между двумя спутниками число измеренных межспутниковых дальностей будет равно, соответственно, N(N-1). В полученных измерениях содержатся следующие неизвестные переменные: N(N-1)/2 истинных расстояний между N спутниками, (N-1) линейно независимых ошибок взаимной синхронизации часов N спутников (остальные (N-1)(N/2-1) определяются их линейными комбинациями), N инструментальных погрешностей передатчиков N спутников и N инструментальных погрешностей приемников N спутников, т.е. общее число неизвестных переменных составляет N(N-1)/2+N-1+N+N. Приравнивая общее число измерений к числу неизвестных переменных, имеем следующее уравнение:
N(N-1)/2=3N-1
или
N2-7N+2=0,
откуда легко определяется число спутников, необходимое и достаточное для решения поставленной задачи:
N=7.
(Если истинные расстояния между спутниками известны - например, измерены с высокой точностью лазерными дальномерами, то число неизвестных переменных сокращается до 3N-1 и уравнение, определяющее число спутников, принимает вид;
N2-4N+1=0,
откуда N=4.)
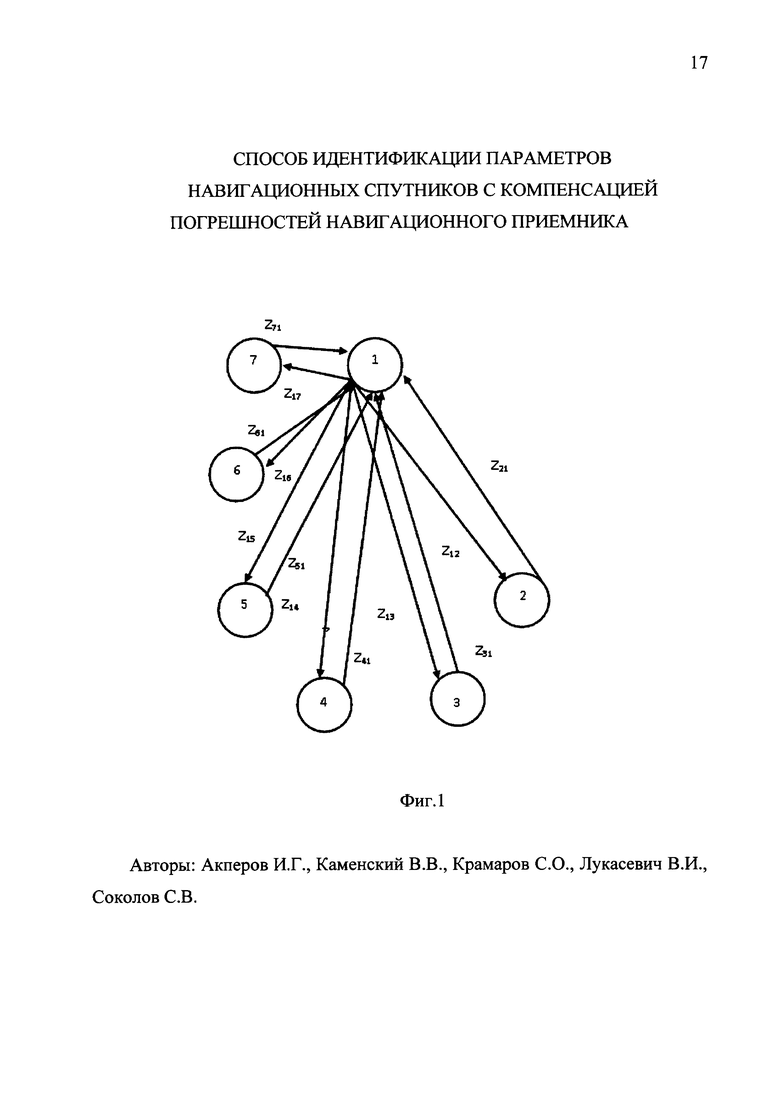
В принятых обозначениях измеренные расстояния (псевдодальности) Zij между семью навигационными спутниками 11, 12, 13, 14, 15, 16 и 17 (фиг. 1) могут быть представлены следующим образом:
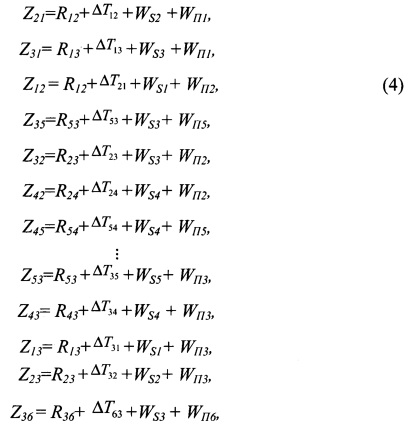
где ΔT12, ΔT13, ΔT53, ΔT23, …, ΔT34, ΔT54, ΔT24 - погрешности взаимной синхронизации часов спутников 11, 12, 13, 14, 15, 16 и 17,
R13, R23, R12, …, R53, R24, R54 - истинные дальности между спутниками,
WП1, WП2, WП3, WП4, WП5, WП6, WП7 - инструментальные погрешности приемников спутников 11, 12, 13, 14, 15, 16 и 17,
WS1, WS2, WS3, WS4, WS5, WS6, WS7 - инструментальные погрешности передатчиков спутников 11, 12, 13, 14, 15, 16 и 17, соответственно.
Учитывая очевидные соотношения:
ΔTji=-ΔTij, ΔTjk=ΔTik-ΔTij=ΔTk-ΔTk-ΔTj, i, j, k=1, 2 … 5,
система (4) из 42-х уравнений с 77-ю неизвестными может быть сведена к системе 42-х уравнений с 41-м неизвестным - 21-й истинной дальностью R13, R23, R12, …, R53, R24, R54, 6-ю независимыми погрешностями взаимной синхронизации часов спутников (выбор определяемых погрешностей принципиального значения не имеет, поэтому выберем далее в качестве независимых переменных погрешности ΔT12, ΔT13, ΔT14, ΔT15, ΔT17, ΔT16), 7-ю инструментальными погрешностями передатчиков WS1, WS2, WS3, WS4, WS5, WS6, WS7 и 7-ю инструментальными погрешностями приемников WП1, WП2, WП3, WП4, WП5, WП6, WП7:

и легко решается любым из известных способов решения линейных алгебраических уравнений непосредственно на борту каждого из спутников 11, 12, 13, 14, 15, 16 и 17. (Т.к. при этом одно избыточное уравнение может быть исключено, возникает возможность дополнительного формирования еще  систем уравнений, аналогичных (5), для их параллельного решения с целью повышения точности - за счет, например, усреднения полученных результатов.)
систем уравнений, аналогичных (5), для их параллельного решения с целью повышения точности - за счет, например, усреднения полученных результатов.)
В данном случае решается не только задача текущего определения погрешностей взаимной синхронизации часов всех спутников и инструментальных погрешностей их передатчиков и приемников, используемых, как показано далее, для компенсации помех в сигнале навигационного приемника объекта, но и расстояний между спутниками, используемых, в свою очередь, в качестве дополнительной информации для определения их текущих координат. Рассмотрим способ такого определения подробно.
В гринвичской системе координат (ГрСК) истинное расстояние Rij между двумя спутниками - i-м и j-м, может быть представлено следующим образом [ГЛОНАСС. Интерфейсный контрольный документ / Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением (Редакция 5.1). 2008. - 74 с.], [ГЛОНАСС. Принципы построения и функционирования. 3-е изд. / под ред. А.И. Перова, В.Н. Харисова, М.: Радиотехника, 2005. 688 с.]:

где ξi, ηi, ζi - текущие координаты i-го спутника в ГрСК,
ξj, ηj, ζj - текущие координаты j-го спутника в ГрСК.
Т.к. число истинных дальностей между N спутниками определяется как N(N-1)/2, а число неизвестных координат N спутников равно 3N, то число спутников, необходимое и достаточное для решения задачи определения их текущих координат, удовлетворяет уравнению:
N(N-1)/2=3N, откуда N=7.
Т.е. найденное выше число спутников, необходимое и достаточное для решения задачи определения их параметров, позволяет еще дополнительно решать задачу определения их текущих координат непосредственно на борту спутника путем решения системы нелинейных уравнений (6) известными численными методами [ГЛОНАСС. Интерфейсный контрольный документ / Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением (Редакция 5.1). 2008. - 74 с.], [ГЛОНАСС. Принципы построения и функционирования. 3-е изд. / под ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника, 2005. 688 с.].
Алгоритм технической реализации предложенного способа рассмотрим по шагам на примере спутника 1 (фиг. 1).
1. Передача навигационных сообщений к спутникам 12, 13, 14, 15, 16 и 17.
2. Прием навигационных сообщений от спутников 12, 13, 14, 15, 16 и 17 (выполняется одновременно с п. 1).
3. Определение псевдодальностей Z21, Z31, Z41, Z51, Z61, Z71 до спутников 12, 13, 14, 15, 16 и 17.
4. Параллельная передача полученных значений псевдодальностей Z21, Z31, Z41, Z51, Z61, Z71 на спутники 12, 13, 14, 15, 16 и 17.
5. Прием значений псевдодальностей Z12, Z32, Z42, Z52, Z62, Z72 от спутника 2 (выполняется одновременно с п. 4).
6. Прием значений псевдодальностей Z13, Z23, Z43, Z53, Z63, Z73 от спутника 3 (выполняется одновременно с п. 4).
7. Прием значений псевдодальностей Z14, Z24, Z34, Z54, Z64, Z74 от спутника 4 (выполняется одновременно с п. 4).
8. Прием значений псевдодальностей Z15, Z25, Z45, Z35, Z65, Z75 от спутника 5 (выполняется одновременно с п. 4).
9. Прием значений псевдодальностей Z16, Z26, Z46, Z36, Z56, Z76 от спутника 6 (выполняется одновременно с п. 4).
10. Прием значений псевдодальностей Z17, Z27, Z47, Z37, Z67, Z57 от спутника 7 (выполняется одновременно с п. 4).
11. Решение системы уравнений (5) и вычисление истинных дальностей R13, R23, R12, …, R53, R24, R54, погрешностей взаимной синхронизации часов спутников ΔT12, ΔT13, ΔT14, ΔT15, ΔT16, ΔT17, инструментальных погрешностей передатчиков спутников WS1, WS2, WS3, WS4, WS5, WS6, WS7 и инструментальных погрешностей приемников спутников WП1, WП2, WП3, WП4, WП5, WП6, WП7.
12. Решение системы уравнений (6) и вычисление текущих координат всех спутников.
13. Передача в спутниковом сообщении текущих координат всех спутников, погрешностей взаимной синхронизации часов и значений инструментальных погрешностей передатчиков спутников для последующей корректировки спутниковых измерений (1).
14. Комплексная компенсация погрешностей спутникового сообщения в навигационном приемнике.
Детализируем реализацию п. 14, которая осуществляется следующим образом.
Для решения навигационной задачи спутниковые сообщения принимаются, как правило, не менее, чем от четырех спутников [ГЛОНАСС. Интерфейсный контрольный документ / Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением (Редакция 5.1). 2008. - 74 с.], [ГЛОНАСС. Принципы построения и функционирования. 3-е изд. / под ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника, 2005. 688 с.], что позволяет формировать различные линейные комбинации сигналов, принимаемых от разных спутников. Так, разность сигналов псевдодальностей, принятых от двух спутников - i-го и j-го, с учетом (1) имеет вид:

где принято вытекающее из практики спутниковой навигации допущение об идентичности помех, обусловленных прохождением через ионосферу и тропосферу радиосигналов спутников, находящихся в зоне видимости одного и того же объекта.
Как видно из (7), разность сигналов ZRi-ZRj=ΔZij любых двух спутников содержит помеховые составляющие ΔTij, Wsi, Wsj, которые уже известны из принятого спутникового сообщения и могут быть скомпенсированы (и не содержит остальных помех, приведенных в (1): ошибок часов приемника, его инструментальных погрешностей и др.). В результате, обработке-применению стандартной итеративной процедуры решения системы нелинейных уравнений [ГЛОНАСС. Интерфейсный контрольный документ / Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением (Редакция 5.1). 2008. - 74 с.], [ГЛОНАСС. Принципы построения и функционирования. 3-е изд. / под ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника, 2005. 688 с.] подлежат сигналы (в данном случае не менее трех), содержащие только истинную информацию о координатах объекта:

что позволяет существенно повысить общую точность решения навигационной задачи.
Предложенный способ определения параметров навигационных спутников с компенсацией погрешностей навигационного приемника позволяет, используя простые методы радио- и лазерных измерений, во-первых, существенно повысить точность синхронизации хода часов на всех навигационных спутниках группировки (что особенно важно для системы ГЛОНАСС, наземные станции синхронизации времени которой расположены только на территории РФ), во-вторых, определять текущие координаты непосредственно на борту спутника, снижая, тем самым, вычислительную нагрузку на приемники потребителей и телеметрических станций слежения, и в-третьих, повысить общую точность решения навигационной задачи за счет компенсации основных помех в принятом навигационном сообщении. При этом также неизбежно увеличение точности определения рассмотренных пространственно-временных параметров в силу большей точности межспутниковых измерений, осуществляемых в космосе, по сравнению с телеметрическими, подверженными влиянию атмосферных возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2584541C1 |
| Способ определения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем | 2016 |
|
RU2624268C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАВИГАЦИОННОГО ПРИЕМНИКА | 2014 |
|
RU2567368C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2015 |
|
RU2592077C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2690521C1 |
Изобретение относится к способам навигации по спутниковым радионавигационным системам (СРНС) и может быть использовано для определения параметров навигационных спутников и повышения точности определения координат навигационного приемника. Достигаемый технический результат - повышение точности определения местоположения навигационного приемника за счет коррекции и учета погрешности взаимной синхронизации часов навигационных спутников, а также инструментальных погрешностей передатчиков спутников. 1 ил.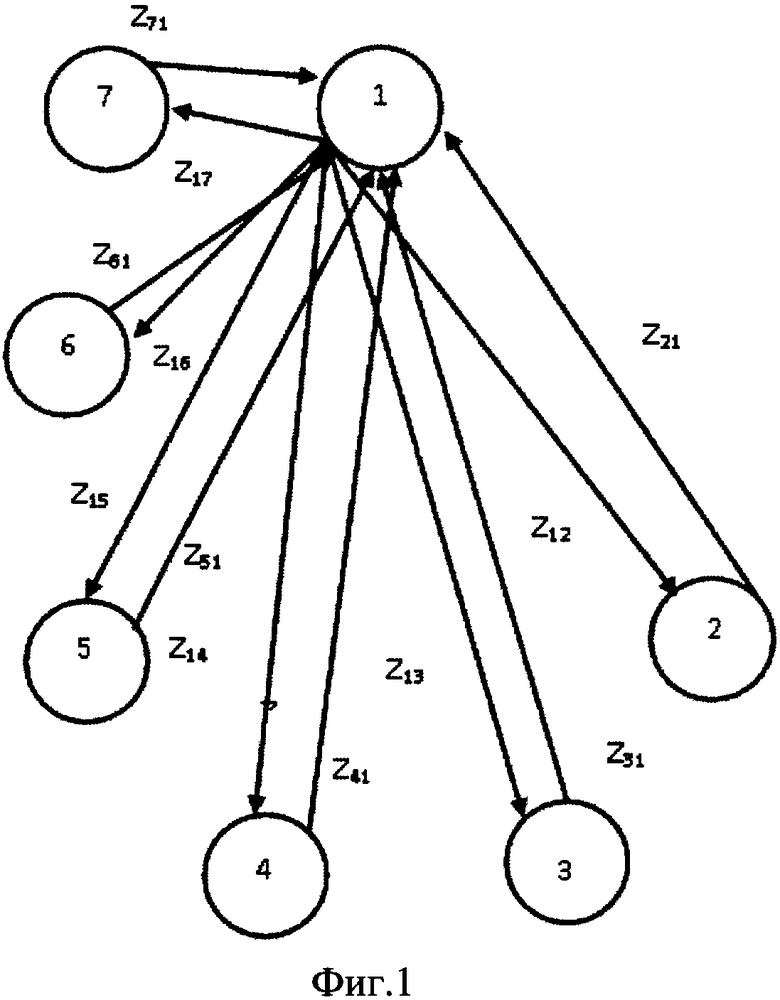
Способ определения параметров навигационных спутников с компенсацией погрешностей навигационного приемника, заключающийся в том, что в группе из семи навигационных спутников, число которых определено из условия равенства числа измеренных межспутниковых дальностей при обоюдном измерении расстояний между двумя спутниками числу неизвестных параметров спутников: истинных дальностей между спутниками, погрешностей взаимной синхронизации часов спутников, инструментальных погрешностей передатчиков и приемников спутников, реализуются одновременные передача навигационных сообщений от каждого спутника к каждому и их прием каждым спутником от каждого, определение межспутниковых псевдодальностей и их передача на все спутники группировки с последующим решением на каждом спутнике сорока одного линейного алгебраического уравнения, число которых определяется числом неизвестных определяемых параметров: двадцатью одной истинной межспутниковой дальностью, шестью погрешностями взаимной синхронизации часов семи спутников, семью инструментальными погрешностями передатчиков и семью инструментальными погрешностями приемников семи спутников, и каждое из которых представляет собой линейную зависимость псевдодальности между соответствующими двумя спутниками от истинной дальности между ними, погрешности взаимной синхронизации их часов и инструментальных погрешностей их передатчиков и приемников; в результате решения данных линейных уравнений на каждом спутнике определяются истинные дальности между спутниками, погрешности взаимной синхронизации часов спутников, инструментальные погрешности передатчиков и приемников спутников, после чего погрешности взаимной синхронизации часов спутников и инструментальные погрешности их передатчиков передаются в навигационных сообщениях и компенсируются в навигационном приемнике объекта при определении его координат, осуществляемом на основе решения итеративными методами системы не менее трех нелинейных уравнений, каждое из которых сформировано по разности измеренных псевдодальностей между объектом и двумя спутниками группировки и представляет собой радикально-квадратичную зависимость разности истинных дальностей между объектом и двумя спутниками группировки от координат объекта в гринвичской системе координат.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНОГО ПРИЕМНИКА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ (СРНС) | 2010 |
|
RU2432584C2 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| Поворотная кровать для ожоговых больных | 1957 |
|
SU111940A1 |
| ИДЕНТИФИКАЦИЯ ЧАСТОТ И СПУТНИКОВ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В СТАНДАРТАХ ДАННЫХ ПОДДЕРЖКИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2481595C2 |
| US 7535414 B2, 19.05.2009 | |||
| US 6091785 A,18.07.2000 | |||
| WO 2007099196 A1, 07.09.2007. | |||

