Изобретение относится к гидроакустике и может быть использовано для обнаружения движущегося подводного источника звука, измерения азимутального угла на источник звука и горизонта источника звука в мелком море с помощью акустических приемников, координаты которых и угловое положение считаются известными.
Известен гидроакустический комплекс (Патент РФ №2476899, МПК: G01S 3/80, Н04В 10/00, опубл. 27.08.2013 г., бюлл. №6) для измерения азимутального угла на источник звука и горизонта источника звука в мелком море в пассивном режиме, в котором используется многоканальный цифровой комбинированный гидроакустический комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников N=H/Δz (где Н - глубина моря), а каждый комбинированный приемник состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, содержащую блок сбора обработки и отображения информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора обработки и отображения информации, и формирователь диаграммы направленности, вход и выход которого соединены со входом и выходом блока сбора обработки и отображения информации, а в систему сбора, обработки и отображения информации введены N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, N-канальный блок вычисления азимутального угла, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления усредненного азимутального угла, первый вход которого соединен с выходом N-канального блока вычисления азимутального угла, второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, а выход соединен со вторым входом устройства доступа к цифровым сетям передачи данных, причем усредненный азимутальный угол определяется формулой

где ϕn, Ixn, Iyn - азимутальный угол и компоненты вектора интенсивности, относящиеся к n-у акустическому комбинированному приемнику, а за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности.
Недостатком такого гидроакустического комплекса является сравнительно большая погрешность определения горизонта источника звука и сравнительно малая дальность действия в режиме обнаружения источника звука, обусловленная малой помехоустойчивостью одиночного акустического комбинированного приемника.
Известен также подводный планер для мониторинга векторных звуковых полей (Патент РФ на полезную модель №106880, МПК: В63С 11/48, G01S 15/02, B63G 8/00 опубл. 27.07.2011 г.), состоящий из цилиндрического корпуса с носовым отсеком, несущих поверхностей, горизонтального киля, электронного блока управления с системой спутниковой навигации, записи и передачи информации, аккумуляторных батарей, системы управления плавучестью, набора датчиков, включающих гирокомпас, инклинометр и датчик глубины, носового отсека корпуса, выполненного сообщающимся с внешней средой и представляющего собой звукопрозрачный обтекатель, внутри которого расположена подвеска, выполненная двухзвенной и состоящая из звукопрозрачной рамки, внутри которой установлен акустический комбинированный приемник и лонжей из эластичных и ограничительных нитей, соединяющих комбинированный акустический приемник с рамкой, а рамку с корпусом, причем акустический комбинированный приемник дополнительно соединен ограничительной нитью с натяжителем, установленным внутри корпуса. Такой измерительный комплекс также может быть использован для обнаружения движущегося подводного источника звука, измерения азимутального угла на источник звука и горизонта источника звука в мелком море в пассивном режиме с помощью размещенного в нем акустического комбинированного приемника, координаты которого и угловое положение считаются известными. Мобильность подводного планера, оснащенного акустическим комбинированным приемником, также позволяют ему решать задачи обнаружения и определения азимутального угла на источник звука и горизонта источника звука с повышенной дальностью действия. Такой измерительный комплекс является наиболее близким к заявленному изобретению.
Недостатком такого измерительного комплекса является большая погрешность определения горизонта источника и малая дальность действия в режиме обнаружения, обусловленная малой помехоустойчивостью одиночного акустического комбинированного приемника.
В основу заявленного изобретения поставлена задача устранить указанные недостатки, размещенного на подводном планере, известного измерительного комплекса.
Технический результата, обеспечиваемый при реализации настоящего изобретения заключается в повышении точности определения источника звука, а также увеличении дальности его обнаружения.
Подводный планер для локализации источника звука содержит:
- цилиндрический корпус с носовым и кормовым отсеками, выполненными в виде звукопрозрачных обтекателей, внутри которых расположены комбинированные первый и второй приемники, причем установлены на демпфирующих подвесах,
- систему управления дифферентом с возможностью обеспечения планеру погружения с дифферентом на нос при отрицательной плавучести, близкой к нулевой, и всплытия с дифферентом на корму при положительной плавучести, близкой к нулевой,
- систему обработки данных,
при этом упомянутая система обработки данных включает в себя:
- двухканальный блок оцифровки и первичной обработки данных, вход которого соединен с выходами комбинированных приемников,
- двухканальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом двухканального блока оцифровки и первичной обработки данных,
- двухканальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом двухканального блока оцифровки и первичной обработки данных,
- двухканальный блок вычисления азимутального угла на источник звука, вход которого соединен с выходами двухканального блока вычисления горизонтальных компонент вектора интенсивности,
- блок вычисления усредненного азимутального угла на источник звука, первый вход которого соединен с выходом двухканального блока вычисления азимутального угла на источник звука, второй вход соединен с выходом двухканального блока вычисления горизонтальных компонент вектора интенсивности,
- блок дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате, вход которого соединен с выходом двухканального блока вычисления горизонтальных компонент вектора интенсивности,
- блок дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам, вход которого соединен с выходом двухканального блока вычисления вертикальной компоненты вектора интенсивности,
- блок вычисления горизонтальных компонент ротора вектора интенсивности, первый вход которого соединен с выходом блока дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате, а второй вход соединен с выходом блока дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам,
- блок вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока вычисления горизонтальных компонент ротора вектора интенсивности, а второй вход соединен с выходом блока вычисления усредненного азимутального угла,
- блок вычисления максимального значения угловой компоненты ротора вектора интенсивности в повернутой системе координат, вход которого соединен с выходом блока вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат,
- блок спутниковой системы связи, первый вход которого связан с выходом блока вычисления усредненного азимутального угла на источник звука, второй вход связан с выходом блока вычисления максимального значения угловой компоненты ротора вектора интенсивности в повернутой системе координат, третий вход связан с выходом датчика глубины,
при этом система обработки данных выполнена таким образом, что:
- за горизонт источника звука принимаются показания датчика глубины, соответствующие максимуму угловой компоненты ротора вектора интенсивности в повернутой системе координат,
- кроме того, подводный планер принимает в качестве признака обнаружения движущегося подводного источника звука степень превышения максимума угловой компоненты ротора вектора интенсивности в повернутой системе координат над уровнем этой компоненты в поле фоновой шумовой помехи,
- кроме того, подводный планер дополнительно снабжен маршевыми двигателями, установленными по его правому и левому бортам, управление которыми осуществляется посредством блока управления с системой спутниковой навигации, записи и передачи информации.
Таким образом, именно такая совокупность существенных признаков заявленного устройства позволяет создать подводный планер для измерения азимутального угла на источник звука и горизонта источника, увеличить помехоустойчивость измерительного комплекса за счет привлечения дополнительной информации и дополнительных измерений горизонтальной компоненты ротора вектора интенсивности, а также за счет мониторинга коридора вероятного нахождения источника звука в режиме тишины (в режиме планирования во время погружения на заданный горизонт и последующего всплытия).
Сущность предлагаемого устройства заключается в том, что в нем впервые предложена и реализована конструктивно и схемотехнически процедура пространственного дифференцирования поля вектора интенсивности, позволяющая измерять угловую компоненту ротора вектора интенсивности и использовать эту информацию для повышения точности определения горизонта источника звука, повышения помехоустойчивости акустических комбинированных приемников и увеличения дальности обнаружения подводных источников звука.
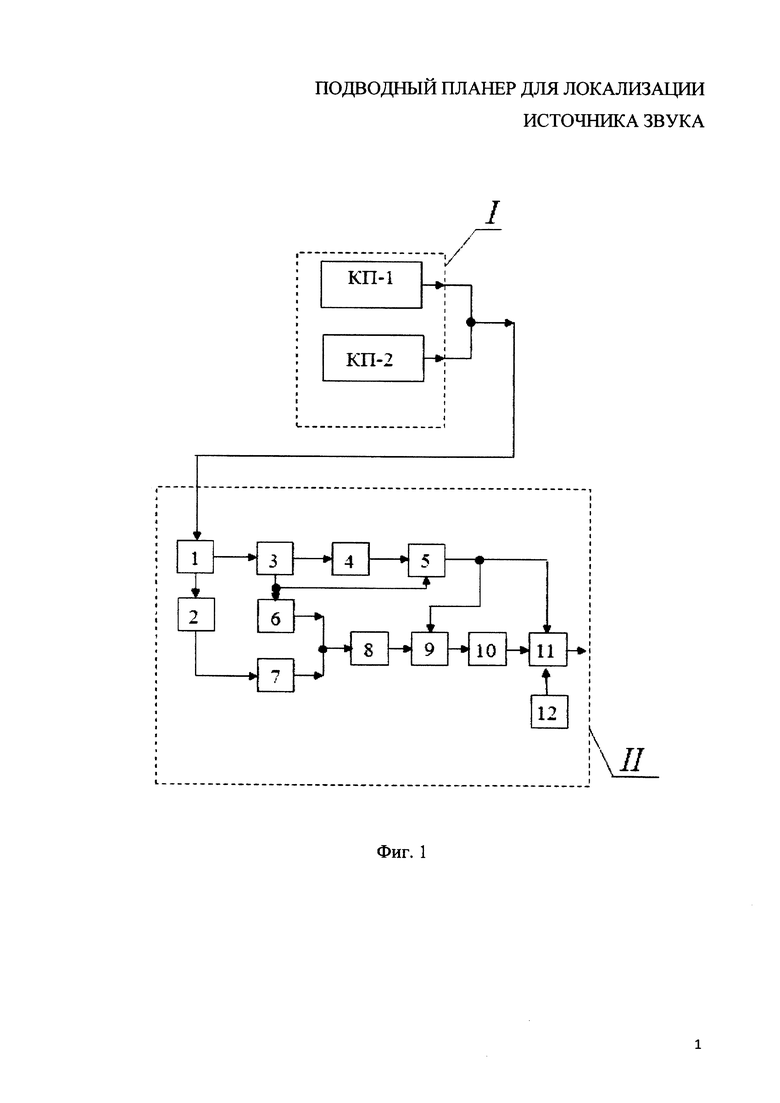
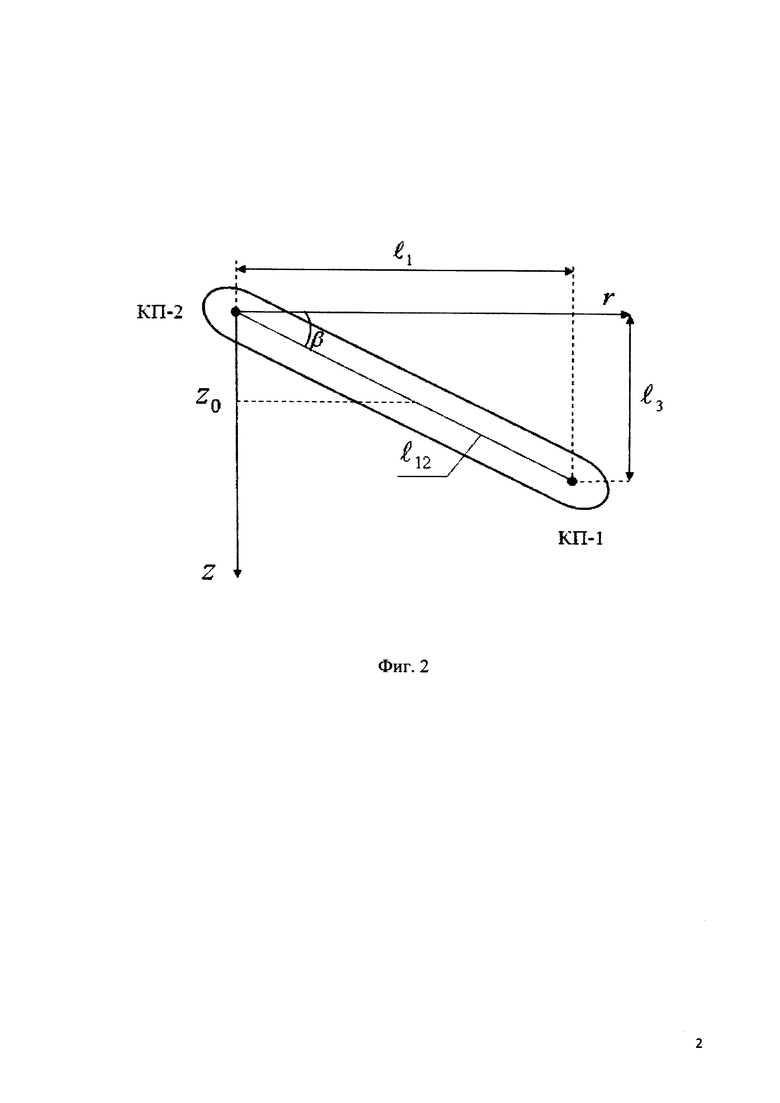
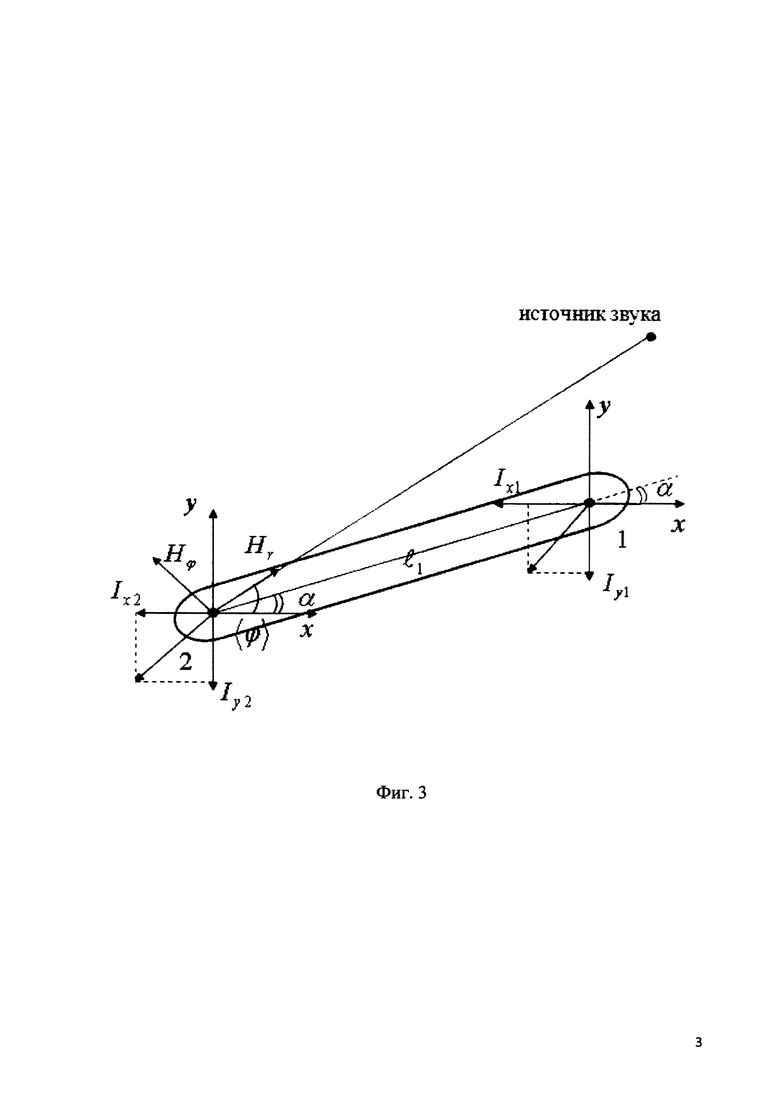
Сущность изобретения поясняется чертежами, где: на фиг. 1 представлена блок-схема системы цифровой обработки данных; на фиг. 2 представлена схема расположения пары акустических комбинированных приемников в вертикальной плоскости, принимающих участие в операции пространственного дифференцирования поля вектора интенсивности; на фиг. 3 представлена схема расположения пары акустических комбинированных приемников в проекции на горизонтальную плоскость, принимающих участие в операции определения усредненного азимутального угла на источник звука и определения угловой компоненты ротора вектора интенсивности.
Заявленный подводный планер для обнаружения движущегося источника звука, измерения азимутального угла на источник звука и горизонта источника в мелком море содержит пару идентичных акустических комбинированных приемников (КП1, КП2 на фиг. 1), каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей (на чертеже не показаны), размещенных в носовом и кормовом отсеках подводного планера (подсистема I на фиг. 1).
Каждый детектор установлен на собственном подвесе, который выполнен двухзвенным и состоящим из звукопрозрачной рамки, внутри которой установлен комбинированный приемник, и лонжей из эластичных и ограничительных нитей. Нити соединяют приемник с рамкой, а рамку с корпусом, причем комбинированный приемник дополнительно соединен ограничительной нитью с натяжителем. Это обеспечивает демпфирование приемников и гашение всех вибраций, связанных с движением планера.
Оба подвеса с детекторами установлены в звукопрозрачных носовом и кормовом колпаках, сообщающихся с внешней средой. Выполнение таких колпаков хорошо известно из уровня техники (см. прототип - Патент РФ на полезную модель №106880).
Планер в соответствии с настоящим изобретением оснащается системой спутниковой навигации, записи и передачи информации, аккумуляторными батареями, системой управления плавучестью, набором датчиков, включающим гирокомпас, инклинометр и датчик глубины.
Система цифровой обработки данных (подсистема II на фиг. 1) включает в себя двухканальный блок 1 оцифровки и первичной обработки данных, вход которого соединен с выходами акустических комбинированных преемников КП1 и КП2, двухканальный блок 2 вычисления вертикальных компонент вектора интенсивности, вход которого соединен с выходом блока 1 оцифровки и первичной обработки данных, 2-канальный блок 3 вычисления горизонтальных компонент вектора интенсивности, вход которого соединен со вторым выходом блока 1 оцифровки и первичной обработки данных, 2-канальный блок 4 определения азимутального угла на источник звука, вход которого соединен с выходом 2-канального блока 3 вычисления горизонтальных компонент вектора интенсивности, блок 5 вычисления усредненного азимутального угла, первый вход которого соединен с выходом 2-канального блока 4 вычисления азимутального угла, а второй вход соединен со вторым выходом 2-канального блока 3 вычисления горизонтальных компонент вектора интенсивности, 2-канальный блок 6 дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате, вход которого соединен с выходом блока 3 вычисления горизонтальных компонент вектора интенсивности, 2-канальный блок 7 дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам, вход которого соединен с выходом 2-канального блока 2 вычисления вертикальной компоненты вектора интенсивности, двухканальный блок 8 вычисления горизонтальных компонент ротора вектора интенсивности, вход которого соединен с выходами 2-канального блока 6 дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате и 2-канального блока 7 дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам, блок 9 вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом 2-канального блока 8 вычисления горизонтальных компонент ротора вектора интенсивности, а второй вход соединен с выходом блока 5 вычисления усредненного азимутального угла, блок 10 вычисления максимального значения угловой компоненты ротора вектора интенсивности, вход которого соединен с выходом блока 9 вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат, блок 11 спутниковой системы связи, первый вход которого соединен с выходом блока 5 вычисления усредненного азимутального угла, второй вход соединен с выходом блока 10 вычисления максимального значения угловой компоненты ротора вектора интенсивности, третий вход соединен с датчиком глубины 12.
Подводный планер работает следующим образом.
Для погружения планера на заданную глубину система управления плавучестью обеспечивает планеру небольшую отрицательную плавучесть, а система управления дифферентом обеспечивает дифферент на нос в пределах 30-40°. После этого планер погружается на заданную глубину в режиме дрейфа (в режиме тишины), обеспечивающем минимальный уровень шумов обтекания. При достижении заданной глубины, которая контролируется датчиком глубины, система управления плавучестью обеспечивает планеру небольшую положительную плавучесть, а система управления дифферентом обеспечивает дифферент на корму в пределах 30-40°. После этого планер всплывает на поверхность в режиме дрейфа (в режиме тишины), передает по системе спутниковой связи информацию по назначению и возвращается в исходную точку позиционирования своим ходом посредством маршевых двигателей. В последующем все операции погружения-всплытия-возвращения в исходную точку циклически повторяются. В процессе погружения-всплытия акустические комбинированные приемники измеряют звуковое давление в гидрофонном канале и компоненты вектора градиента давления в векторных каналах и передают информацию в двухканальный блок 1 оцифровки и первичной обработки данных, вход которого соединен с выходами комбинированных приемников КП1 и КП2. После первичной обработки данных, которая сводится к вычислению комплексных амплитуд спектральных составляющих принятых сигналов в каналах комбинированных приемников, сигналы поступают на вход 2-канального блока 2 вычисления вертикальной компоненты вектора интенсивности, и на вход 2-канального блока 3 вычисления горизонтальных компонент вектора интенсивности. По измеренным горизонтальным компонентам вектора интенсивности в блоке 4 вычисления азимутального угла вычисляются пеленги на источник звука, а в блоке 5 вычисления усредненного азимутального угла вычисляется по формулам

где ϕn, Iхn, Iyn - азимутальный угол и компоненты вектора интенсивности, относящиеся к n-у акустическому комбинированному приемнику, усредненный азимутальный угол на источник звука в локальной системе координат, связанной с комбинированными приемниками. Кроме того, сигналы с выхода блока 2 вычисления вертикальной компоненты вектора интенсивности и с выхода блока 3 вычисления горизонтальных компонент вектора интенсивности поступают соответственно на входы блока 7 дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам и блока 6 дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате по формулам:
где l1, l3 - проекции направленного отрезка l12, соединяющего фазовые центры акустических комбинированных приемников, размещенных в носовом и кормовом отсеках планера, на горизонтальную плоскость и на ось z при заданном угле дифферента β определяются компоненты ротора вектора интенсивности в системе координат, связанной с комбинированным приемником.
После чего сигналы поступают на вход блока 8 вычисления горизонтальных компонент ротора вектора интенсивности по формулам:

где α - заранее определенный угол между осью х локальной системы координат, связанной с комбинированным преемником, и конструктивно заданным направленным отрезком l1, в локальной системе координат, связанной с комбинированными приемниками. Измеренные значения горизонтальных компонент ротора вектора интенсивности поступают на первый вход блока 9 вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат, а на второй вход этого блока поступает информация об усредненном азимутальном угле на источник с выхода блока 5. Вычисленное в блоке 9 по формулам:
где 〈ϕ〉 - усредненное значение азимутального угла на источник звука, вычисляемое по формуле (1) в блоке вычисления усредненного азимутального угла, а ось r в повернутой системе координат направлена на источник звука, значение угловой компоненты ротора вектора интенсивности поступает на вход блока 10 вычисления максимального значения угловой компоненты ротора вектора интенсивности за время погружения-всплытия подводного планера.
Итоговая информация об усредненном значении азимутального угла на источник звука с выхода блока 5, информация о максимальной значении угловой компоненты ротора вектора интенсивности с выхода блока 10 и информация о горизонте источника с выхода датчика глубины 12 поступает на входы блока 11 спутниковой системы связи, причем за горизонт источника звука принимаются показания датчика глубины, соответствующие максимуму угловой компоненты ротора вектора интенсивности, а в качестве признака обнаружения движущегося подводного источника звука принимается степень превышения максимума угловой компоненты ротора вектора интенсивности, принимаемая в качестве предварительно определенного порога обнаружения, над уровнем этой компоненты в поле фоновой шумовой помехи.
Изобретение относится к области устройств для локализации источника звука. Подводный планер содержит крылья, рули, двигатели, аккумуляторную батарею, систему управления. Планер содержит два разнесенных детектора - носовой и кормовой. Каждый детектор прикрыт звукопрозрачным колпаком и установлен на лонжее из эластичных нитей. Система обработки данных включает в себя двухканальный АЦП, выходы которого соединены с двухканальными блоками вычисления вертикальной и горизонтальной компонент вектора интенсивности. Блок вычисления горизонтальной компоненты связан с блоком вычисления азимутального угла, блоком вычисления усредненного азимутального угла и блоком дифференцирования горизонтальной компоненты. Блок вычисления вертикальной компоненты вектора интенсивности связан с блоком дифференцирования вертикальной компоненты вектора. В свою очередь, блоки дифференцирования обеих компонент вектора связаны с блоком вычисления горизонтальных компонент ротора вектора интенсивности, который, в свою очередь, связан с блоком вычисления угловой компоненты вектора ротора интенсивности в повернутой системе координат. Блок вычисления угловой компоненты вектора ротора интенсивности в повернутой системе координат связан с блоком вычисления максимального значения угловой компоненты ротора вектора интенсивности. Технический результат – повышение точности и дальности обнаружения источника звука. 2 з.п. ф-лы, 3 ил.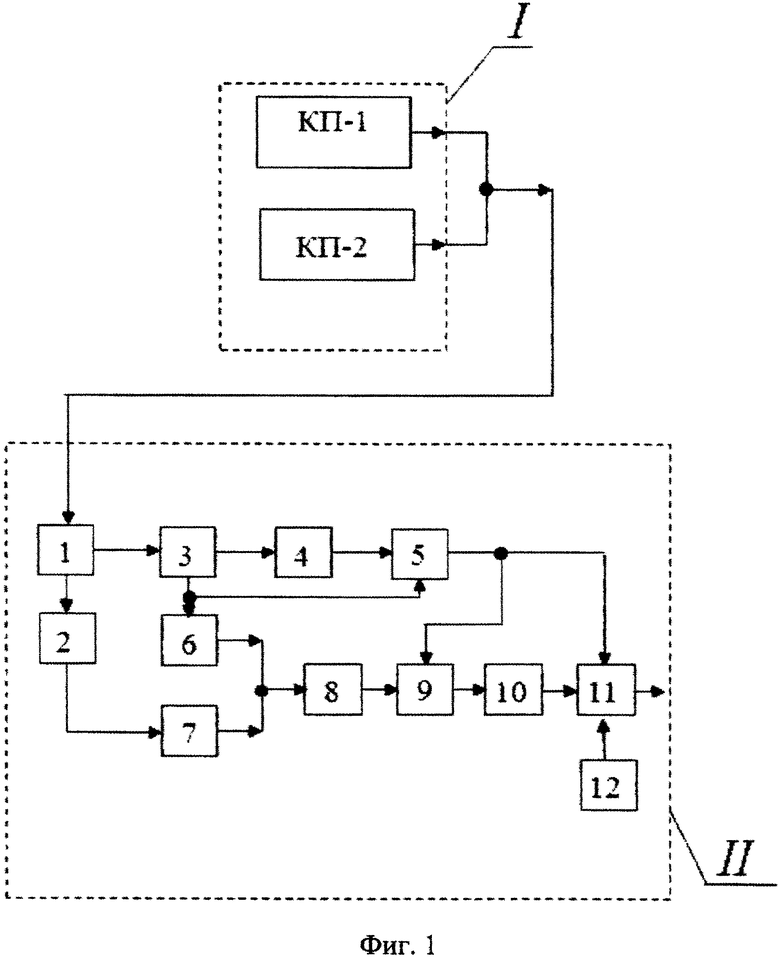
1. Подводный планер для локализации источника звука, содержащий:
цилиндрический корпус с носовым и кормовым отсеками, выполненными в виде звукопрозрачных обтекателей, внутри которых расположены комбинированные первый и второй приемники, причем установлены на демпфирующих подвесах,
систему управления дифферентом с возможностью обеспечения планеру погружения с дифферентом на нос при отрицательной плавучести, близкой к нулевой, и всплытия с дифферентом на корму при положительной плавучести, близкой к нулевой,
систему обработки данных, при этом упомянутая система обработки данных включает в себя:
двухканальный блок оцифровки и первичной обработки данных, вход которого соединен с выходами комбинированных приемников,
двухканальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом двухканального блока оцифровки и первичной обработки данных,
двухканальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом двухканального блока оцифровки и первичной обработки данных,
двухканальный блок вычисления азимутального угла на источник звука, вход которого соединен с выходами двухканального блока вычисления горизонтальных компонент вектора интенсивности,
блок вычисления усредненного азимутального угла на источник звука, первый вход которого соединен с выходом двухканального блока вычисления азимутального угла на источник звука, второй вход соединен с выходом двухканального блока вычисления горизонтальных компонент вектора интенсивности,
блок дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате, вход которого соединен с выходом двухканального блока вычисления горизонтальных компонент вектора интенсивности,
блок дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам, вход которого соединен с выходом двухканального блока вычисления вертикальной компоненты вектора интенсивности,
блок вычисления горизонтальных компонент ротора вектора интенсивности, первый вход которого соединен с выходом блока дифференцирования горизонтальных компонент вектора интенсивности по вертикальной координате, а второй вход соединен с выходом блока дифференцирования вертикальной компоненты вектора интенсивности по горизонтальным координатам,
блок вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока вычисления горизонтальных компонент ротора вектора интенсивности, а второй вход соединен с выходом блока вычисления усредненного азимутального угла,
блок вычисления максимального значения угловой компоненты ротора вектора интенсивности в повернутой системе координат, вход которого соединен с выходом блока вычисления угловой компоненты ротора вектора интенсивности в повернутой системе координат,
блок спутниковой системы связи, первый вход которого связан с выходом блока вычисления усредненного азимутального угла на источник звука, второй вход связан с выходом блока вычисления максимального значения угловой компоненты ротора вектора интенсивности в повернутой системе координат, третий вход связан с выходом датчика глубины,
при этом система обработки данных выполнена таким образом, что за горизонт источника звука принимаются показания датчика глубины, соответствующие максимуму угловой компоненты ротора вектора интенсивности в повернутой системе координат.
2. Подводный планер по п. 1, отличающийся тем, что в качестве признака обнаружения движущегося подводного источника звука принимается степень превышения максимума угловой компоненты ротора вектора интенсивности в повернутой системе координат, принимаемая в качестве предварительно определенного порога обнаружения, над уровнем этой компоненты в поле фоновой шумовой помехи.
3. Подводный планер по п. 1, отличающийся тем, что планер дополнительно снабжен маршевыми двигателями, установленными по его правому и левому бортам, управление которыми осуществляется посредством блока управления с системой спутниковой навигации, записи и передачи информации.
| ГОЙ В.А | |||
| РЕГУЛИРОВАНИЕ ПЛАВУЧЕСТИ И ДИФФЕРЕНТА АВТОНОМНОГО ПОДВОДНОГО РОБОТА // ПОДВОДНЫЕ ИССЛЕДОВАНИЯ И РОБОТОТЕХНИКА, 1 (21), 2016, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ЗВУКА, ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО УГЛА НА ИСТОЧНИК И ГОРИЗОНТА ИСТОЧНИКА ЗВУКА В МЕЛКОМ МОРЕ | 2015 |
|
RU2591030C1 |
| Грузозахватное приспособление | 1956 |
|
SU106880A1 |
| ГОЙ В.А | |||
| РАЗРАБОТКА МОРСКОГО ИНТЕЛЛЕКТУАЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА, ВКЛЮЧАЮЩЕГО АНПА И АНВА // ТЕХНИЧЕСКИЕ ПРОБЛЕМЫ ОСВОЕНИЯ МИРОВОГО ОКЕАНА | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Фальцовая черепица | 0 |
|
SU75A1 |
| WO 2012013962 A1, 02.02.2012 | |||
| US 20140165898 A1, 19.06.2014. | |||

