ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится в целом к глобальным системам определения местоположения (GPS) и глобальным навигационным спутниковым системам (GNSS), а еще точнее к контролю атомных часов глобальных систем определения местоположения (GPS) или глобальных навигационных спутниковых систем (GNSS) с использованием анализа множества уровней, множества пределов и множества устойчивостей.
УРОВЕНЬ ТЕХНИКИ
Глобальная система определения местоположения (GPS) из США представляет собой такой тип глобальной навигационной спутниковой системы (GNSS), в которой содержится совокупность космических аппаратов (например, спутников), которые вращаются вокруг Земли, для выдачи на GPS/GNSS приемники или навигационные устройства навигационных сигналов и сигналов для определения местоположения. Общественными и правительственными организациями используются миллионы GPS/GNSS приемников или навигационных устройств, выполненных с возможностью приема и использования GPS/GNSS сигналов.
GPS/GNSS приемник рассчитывает свое положение путем точной синхронизации сигналов, отправляемых космическими аппаратами глобальной системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS). Каждый космический аппарат непрерывно передает навигационные сообщения, содержащие (1) момент времени, в который сообщение было передано, и (2) положение космического аппарата в момент передачи сообщения. Приемник анализирует навигационные сообщения, принятые минимум от четырех космических аппаратов глобальной системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS). Приемник определяет время прохождения каждого навигационного сообщения и вычисляет соответствующие расстояния до каждого космического аппарата с использованием скорости света. Зная расстояние от приемника до каждого космического аппарата и соответствующее положение каждого космического аппарата, приемник определяет свое положение в трех абсолютных пространственных координатах и в одной абсолютной временной координате.
Точная синхронизация в системах типа GPS/GNSS очень важна для высокоточного отслеживания пути и осуществления навигации. По этой причине космические аппараты системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS) используют для синхронизации высокоточные атомные эталоны частоты (AFS), такие как рубидиевые атомные часы. Атомные эталоны частоты (AFS) могут проявлять различные аномалии тактового сигнала, которые могут приводить к существенным ошибкам в навигации и отслеживании перемещения посредством системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS), если они остаются необнаруженными.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Иллюстративный способ, раскрытый в настоящей заявке, включает установление разности между атомным эталоном частоты (AFS) и контролирующим устройством. Способ также включает моделирование модели оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством и вычисление остаточного сигнала на основании измеренной разности и модели оцененной разности. Кроме того, способ включает анализ, посредством первого датчика, остаточного сигнала во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации одного или большего количества из следующего: фазовый скачок, частотный скачок и погрешность вследствие ускорения. Кроме того, способ включает анализ, посредством второго датчика, параметра модели оцененной разности во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела отклонения до индикации отклонения.
Иллюстративное устройство, раскрытое в настоящей заявке, содержит измерительное устройство, оценочное устройство, анализирующее устройство, первый датчик и второй датчик. Измерительное устройство предназначено для измерения разности между атомным эталоном частоты (AFS) и контролирующим устройством. Оценочное устройство предназначено для моделирования оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством. Анализирующее устройство предназначено для вычисления остаточного сигнала на основании измеренной разности и оцененной разности. Первый датчик предназначен для анализа остаточного сигнала во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации одного или большего количества из следующего: фазовый скачок, частотный скачок и погрешность вследствие ускорения. Второй датчик предназначен для анализа параметра оцененной разности во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела отклонения до индикации отклонения.
Другой иллюстративный способ включает установление измеренной разности между атомным эталоном частоты (AFS) и контролирующим устройством и моделирование модели оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством. Иллюстративный способ также включает обнаружение, посредством датчика, отклонения, если параметр модели оцененной разности превышает предел при соответствующей устойчивости, задающей количество превышений предела отклонения до индикации отклонения.
Настоящее изобретение может включать способ, который может включать установление измеренной разности между атомным эталоном частоты (AFS) и контролирующим устройством, моделирование модели оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством, вычисление остаточного сигнала на основании измеренной разности и модели оцененной разности, анализ, посредством первого датчика, остаточного сигнала во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации одного или большего количества из следующего: фазовый скачок, частотный скачок и погрешность вследствие ускорения, и анализ, посредством второго датчика, параметра модели оцененной разности во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела отклонения до индикации отклонения. Способ может также включать определение, посредством структуры для голосования, источника скачка или источника отклонения для улучшения технических характеристик. Параметр может представлять собой сдвиг частоты для улучшения эффективности. Контролирующее устройство может представлять собой независимые часы. Независимые часы могут представлять собой управляемый напряжением генератор или генератор с числовым управлением. Независимые часы могут представлять собой кварцевый генератор и управляемый напряжением генератор или генератор с числовым управлением. Независимые часы могут представлять собой кварцевый генератор. Контролирующее устройство может представлять собой тактовый сигнал с задержкой атомного эталона частоты (AFS). Тактовый сигнал с задержкой создается с использованием механизма задержки на основе генератора. Создаваемый тактовый сигнал с задержкой может использовать линию задержки для улучшения эффективности.
Настоящее изобретение может включать устройство, которое может содержать измерительное устройство для измерения разности между атомным эталоном частоты (AFS) и контролирующим устройством, оценочное устройство для моделирования оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством, анализирующее устройство для вычисления остаточного сигнала на основании измеренной разности и оцененной разности, первый датчик для анализа остаточного сигнала во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации одного или большего количества из следующего: фазовый скачок, частотный скачок и погрешность вследствие ускорения, и второй датчик для анализа параметра оцененной разности во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела отклонения до индикации отклонения. Устройство может также содержать структуру для голосования для определения источника скачка или источника отклонения. Параметр может представлять собой сдвиг частоты. Контролирующее устройство может представлять собой независимые часы. Контролирующее устройство может представлять собой тактовый сигнал с задержкой атомного эталона частоты (AFS).
Настоящее изобретение может представлять собой способ, который может включать установление измеренной разности между атомным эталоном частоты (AFS) и контролирующим устройством, моделирование модели оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством, и обнаружение, посредством датчика, отклонения, если параметр модели оцененной разности превышает предел при соответствующей устойчивости, задающей количество превышений предела отклонения до индикации отклонения. Способ может также включать анализ, посредством датчика, параметра модели оцененной разности во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела отклонения до индикации отклонения. Параметр может представлять собой сдвиг частоты. Контролирующее устройство может представлять собой независимые часы. Контролирующее устройство может представлять собой тактовый сигнал с задержкой атомного эталона частоты (AFS). Каждый из этих вариантов может улучшать технические возможности и точность настоящего изобретения.
Особенности, функции и преимущества, которые были описаны, могут быть достигнуты независимо друг от друга в различных примерах или могут быть объединены еще в одних примерах, дополнительные сведения о которых можно увидеть по ссылке на приведенные далее раздел «Осуществление изобретения» и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показана структурная схема иллюстративной системы для контроля атомных часов.
На фиг. 2 показана структурная схема второй иллюстративной системы для контроля атомных часов.
На фиг. 3 показана иллюстративная система для контроля атомных часов, имеющая подход к контролю на основе независимых часов.
На фиг. 4 показана иллюстративная система для контроля атомных часов, имеющая подход на основе задержки.
На фиг. 5 показана иллюстративная система на основе независимых часов, которая использует управляемый напряжением кварцевый генератор (VCXO) или кварцевый генератор с числовым управлением (NCO).
На фиг. 6 показана иллюстративная система на основе независимых часов, которая использует высококачественный кварцевый генератор (СХО) вместе с относительно недорогим управляемым напряжением кварцевым генератором (VCXO) или кварцевым генератором с числовым управлением (NCO) для формирования схемы фазовой подстройки частоты.
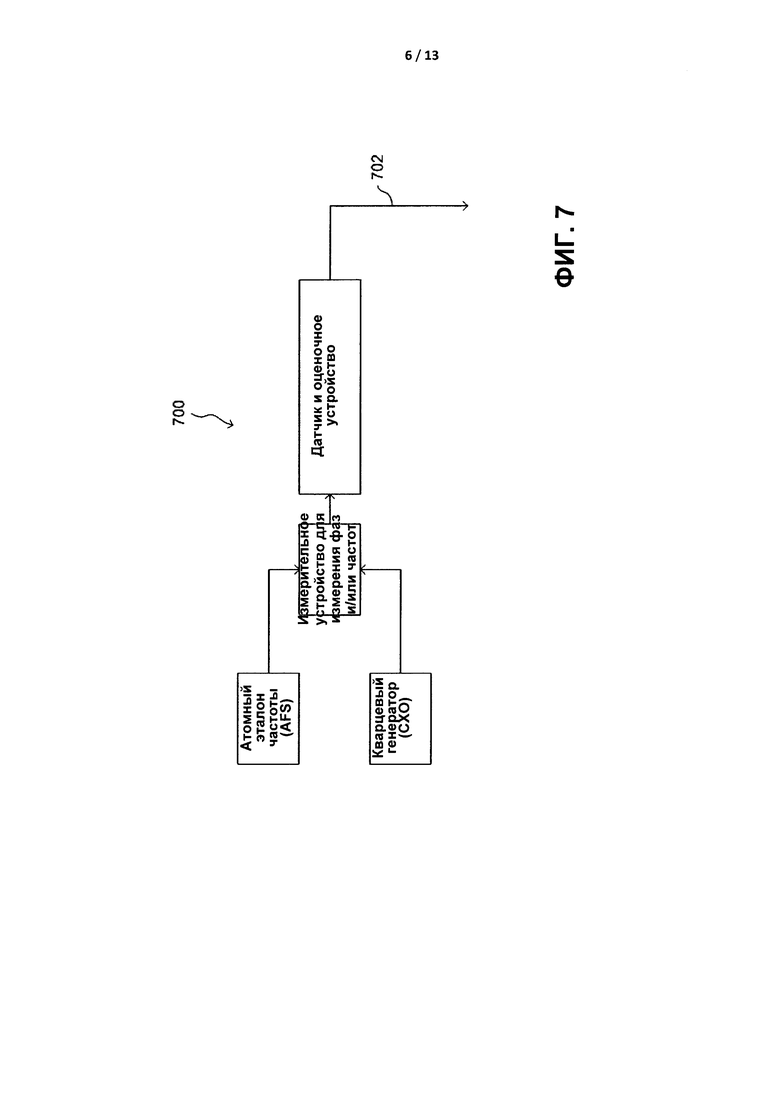
На фиг. 7 показана иллюстративная система на основе независимых часов, которая использует высококачественный кварцевый генератор (СХО) без применения корректировок.
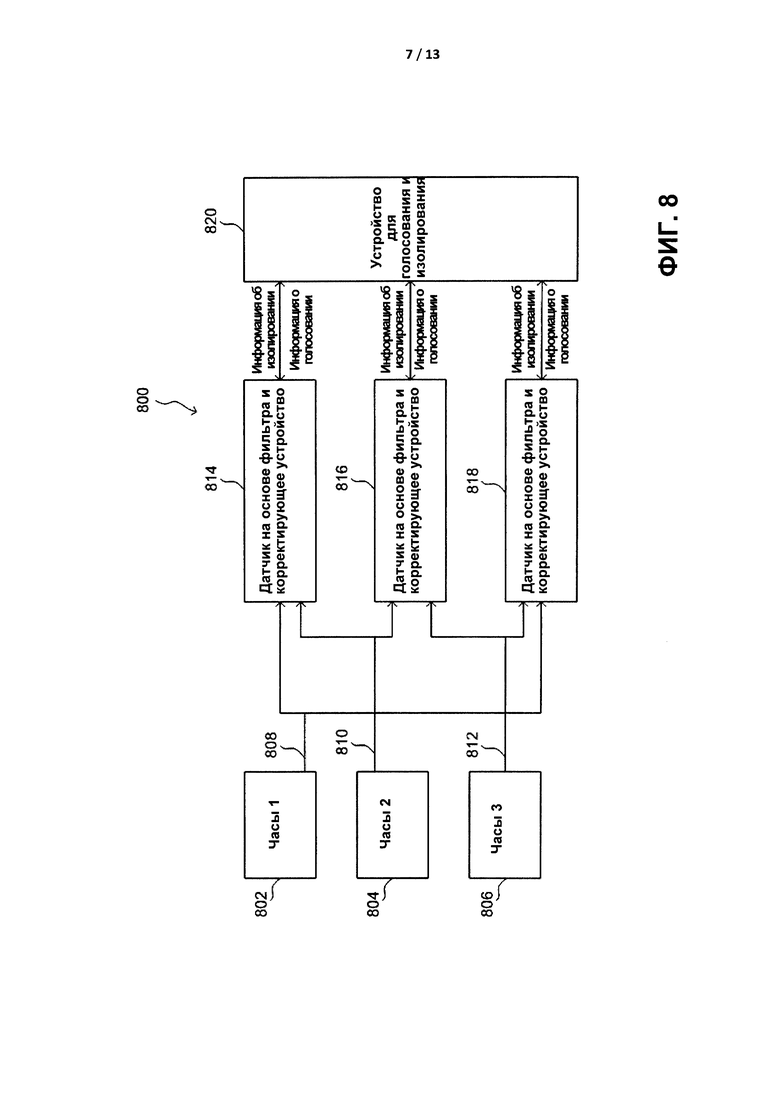
На фиг. 8 показана иллюстративная высокоуровневая структура для голосования.
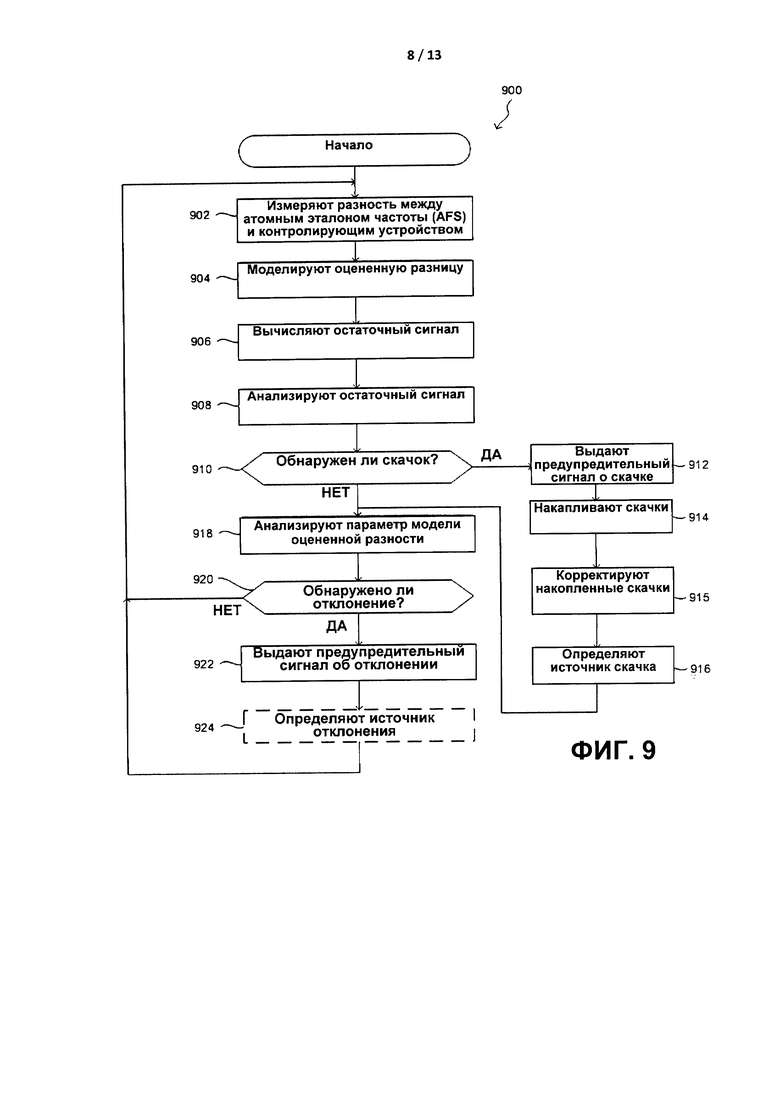
На фиг. 9 показана блок-схема, показывающеая иллюстративный способ реализации системы для контроля часов.
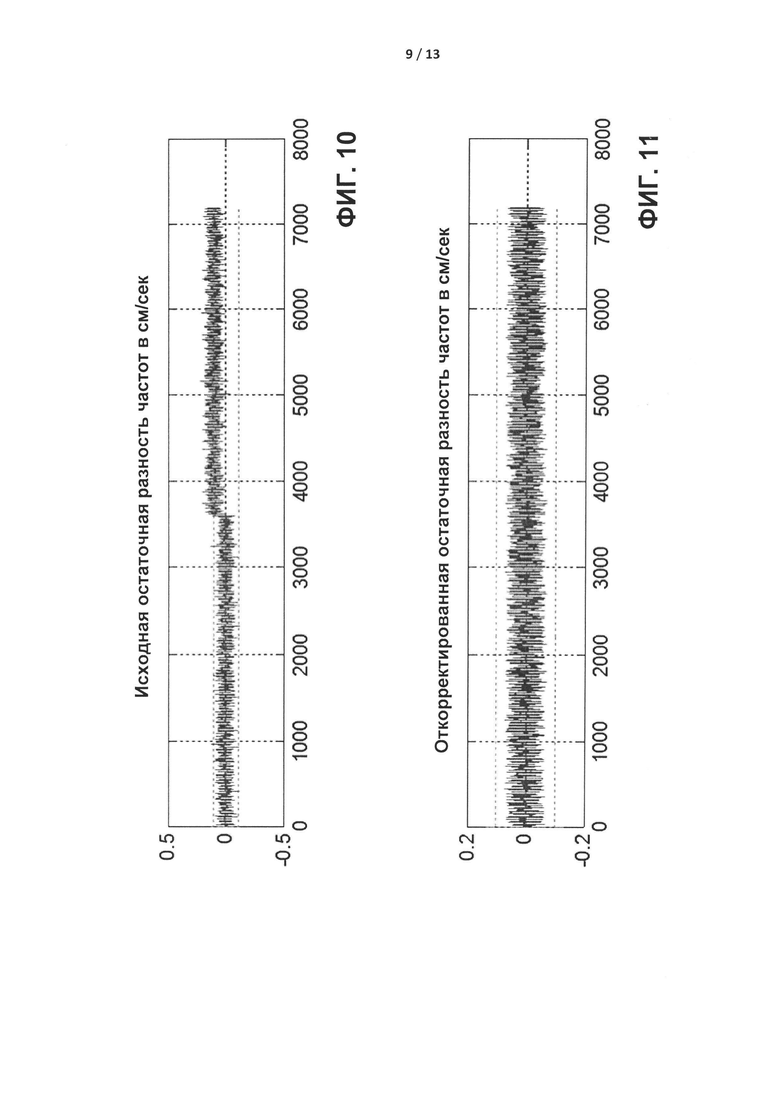
На фиг. 10 показан график исходной остаточной разности частот.
На фиг. 11 показан график исходной остаточной разности частот, содержащий корректировки на скачок.
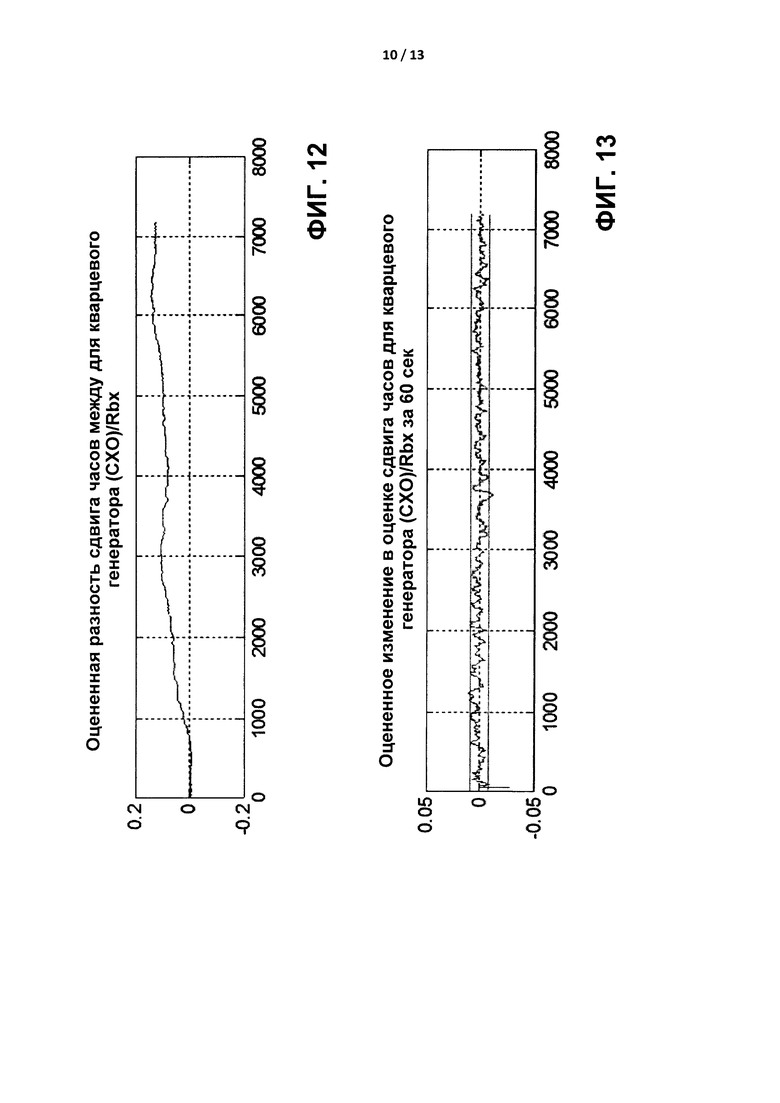
На фиг. 12 показан график оцененного сдвига часов.
На фиг. 13 показан график оцененного сдвига часов, содержащий корректировки на скачок.
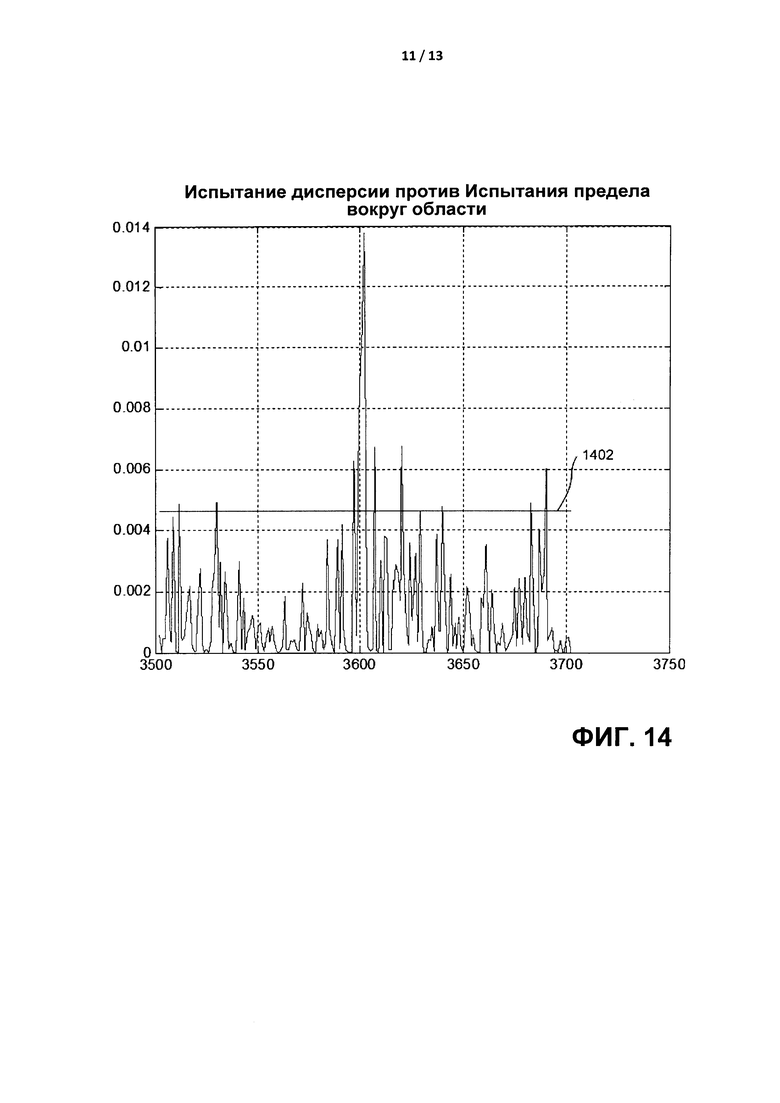
На фиг. 14 показан график остаточной разности частот.
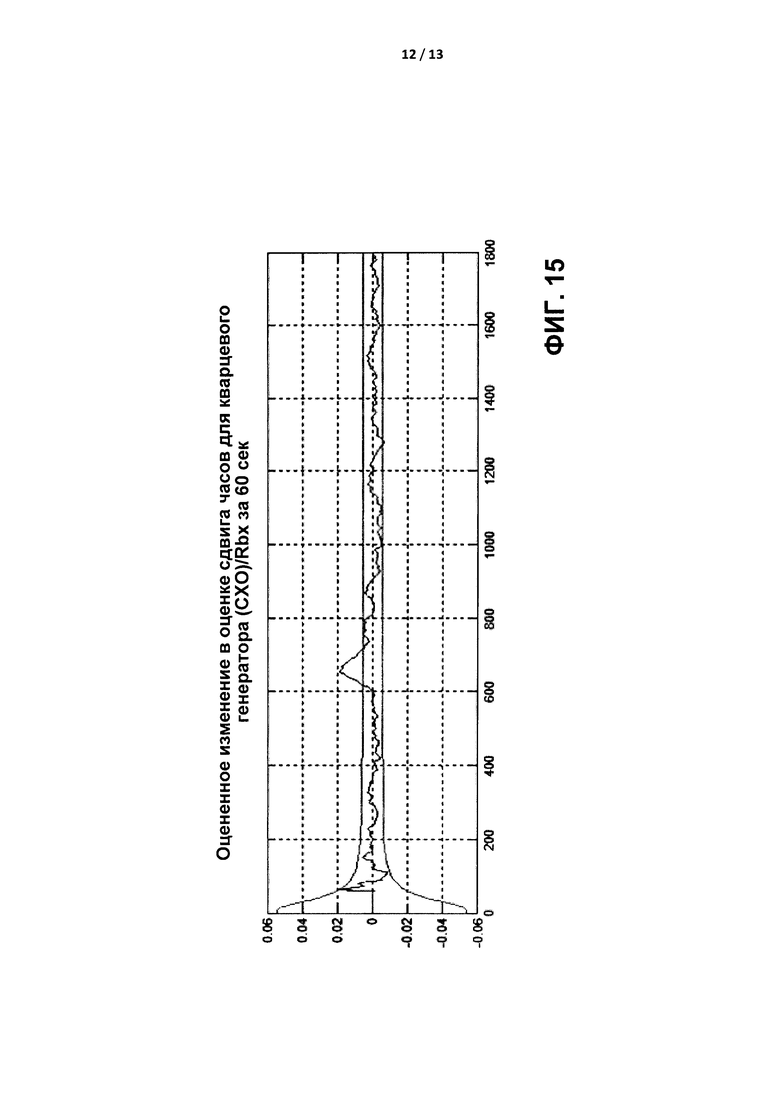
На фиг. 15 показаны результаты отдатчика уровня 2.
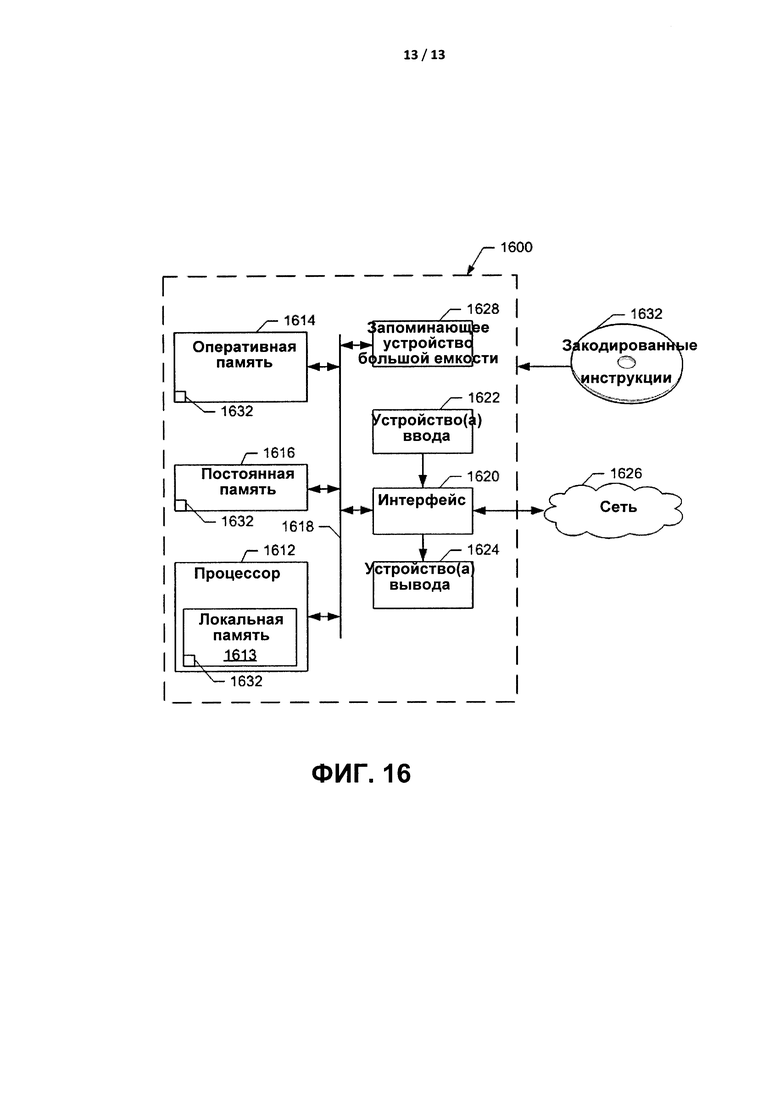
На фиг. 16 показана структурная схема иллюстративной платформы для обработки данных, выполненной с возможностью выполнения машиночитаемых инструкций для реализации инструкций по фиг. 9.
Там, где это уместно, одни и те же ссылочные номера будут использованы на чертеже или на всех чертежах и в разделе «Осуществление изобретения» для обращения к одним и тем же или схожим частям.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В глобальных системах определения местоположения (GPS) и глобальных навигационных спутниковых системах (GNSS) применяются атомные эталоны частоты (AFS), такие как рубидиевые атомные часы, для поддержания точной синхронизации. Атомные эталоны частоты (AFS), такие как рубидиевые атомные часы, подвержены различным аномалиям, включающим скачки частоты, скачки фаз, скачки в значении частоты и ненормальные отклонения частоты. Не обнаруженные и не обработанные надлежащим образом такие аномалии, как указанные выше, могут вызывать существенные погрешности при определении конечным пользователем своего положения, скорости и времени.
Контроль, обнаружение и реагирование на аномалии тактового сигнала могут быть выполнены в приемнике конечного пользователя системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS), в наземном управляющем сегменте глобальной системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS) или в космическом аппарате системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS) (например спутнике) с различными техническими характеристиками, связанными с каждым местом.
Иллюстративные способы и устройство, раскрытые в настоящей заявке, обеспечивают возможность контроля, обнаружения и реагирования на аномалии тактового сигнала атомных часов системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS) на борту космического аппарата. Бортовой контроль часов обеспечивает наиболее эффективное время выдачи сигнала тревоги, доступность и бесперебойность услуг. При идентификации аномалий тактового сигнала на борту, где генерируются тактовые сигналы, аномалии могут быть быстро обнаружены, и могут быть переданы незамедлительно сигналы тревоги. В некоторых примерах аномалии тактового сигнала могут быть откорректированы до передачи ошибочных сигналов от космического аппарата, что предотвращает передачу ложной информации и, таким образом, улучшает доступность и/или бесперебойность услуг.
Иллюстративные способы и устройство, раскрытые в настоящей заявке, содержат различные контролирующие структуры для контроля часов. В некоторых примерах существующие компоненты используют для выполнения контроля часов без необходимости в дополнительном аппаратном обеспечении. Например, существующий генератор, такой как кварцевый генератор (СХО), управляемый напряжением кварцевый генератор (VCXO) и/или кварцевый генератор с числовым управлением (NCO), может быть использован для выполнения контроля часов в соответствии с описанными в настоящей заявке примерами. В некоторых примерах компоненты, такие как вышеуказанные, включены в систему для выполнения различных функций, таких как преобразование с повышением частоты. Дополнительные возможности могут быть реализованы с минимальными дополнительными издержками путем использования существующих компонентов для выполнения контроля часов.
Первая иллюстративная контролирующая структура для контроля часов контролирует атомный эталон частоты (AFS) путем сравнения фазового и/или частотного сигнала атомного эталона частоты (AFS) с фазой и/или частотой других часов, таких как кварцевый генератор (СХО). Вторая иллюстративная контролирующая структура для контроля часов контролирует атомный эталон частоты (AFS) путем сравнения изменения фазы и/или изменения частоты сигнала атомного эталона частоты (AFS) за фиксированный интервал задержки. Каждая из первой и второй иллюстративных контролирующих структур для контроля часов содержит множество вариантов реализации на различных уровнях технических характеристик и стоимости.
Раскрытые иллюстративные способы и устройство используют инновационные технологии анализа для обеспечения возможностей всестороннего контроля атомных часов, которые выходят за рамки возможностей известных систем. На высоком уровне эти технологии содержат многоуровневое обнаружение, включая анализ множества пределов и множества устойчивостей для каждого уровня обнаружения.
Многоуровневое обнаружение обеспечивает обнаружение датчиками аномалий конкретных типов на различных уровнях. Примеры содержат датчик уровня 1 и датчик уровня 2. Датчик уровня 1 быстро обнаруживает большие аномалии, а датчик уровня 2 обнаруживает небольшие аномалии за более длительный период времени. На каждом уровне обнаружения анализ множества пределов и множества устойчивостей включает предварительно определенные пределы, основанные на измерительных значениях, с требованиями к устойчивости, связанными с каждым пределом. Устойчивость относится к количеству раз, когда измерение при конретном пределе обязательно должно быть реализовано (например, количество раз, когда результат измерения соответствует или превышает предел) до обнаружения или индикации аномалии.
Во время работы большие и явные аномалии быстро обнаруживаются и сообщаются или корректируются путем использования больших пределов с меньшей устойчивостью, что обеспечивает обнаружение и корректировку аномалий до того, как система станет засоренной. Кроме того, меньшие и менее явные аномалии обнаруживаются за более длительный период времени путем использования более узких пределов с большей устойчивостью, что обеспечивает обнаружение небольших аномалий с одновременным предотвращением ложных предупредительных сигналов, возникающих, например, из-за шума.
После обнаружения таких аномалий оценивают воздействие соответствующих аномалий на погрешность измерения удаленности пользователя (URE), что может обеспечить основу для оперативных решений и предупреждения конечного пользователя. В некоторых примерах предупреждения и прогнозы воздействия включены в навигационные сообщения. В других примерах аномалии (например, скачки или отклонения) корректируют на борту для поддержания точных технических характеристик без компрометирования доступности системы.
В отличие от известных способов корректировки аномалий тактового сигнала атомных часов, раскрытые иллюстративные способы и устройство выполнены с возможностью достижения высокоэффективного контроля атомных часов системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS) при низкой стоимости с одновременной минимизацией вероятности ложных сигналов тревоги и утраченных результатов обнаружения. Высокоэффективный контроль часов содержит, например, возможность обнаружения очень незначительных аномальных событий (например, скачков частоты, составляющих менее 10-12 секунд/секунду).
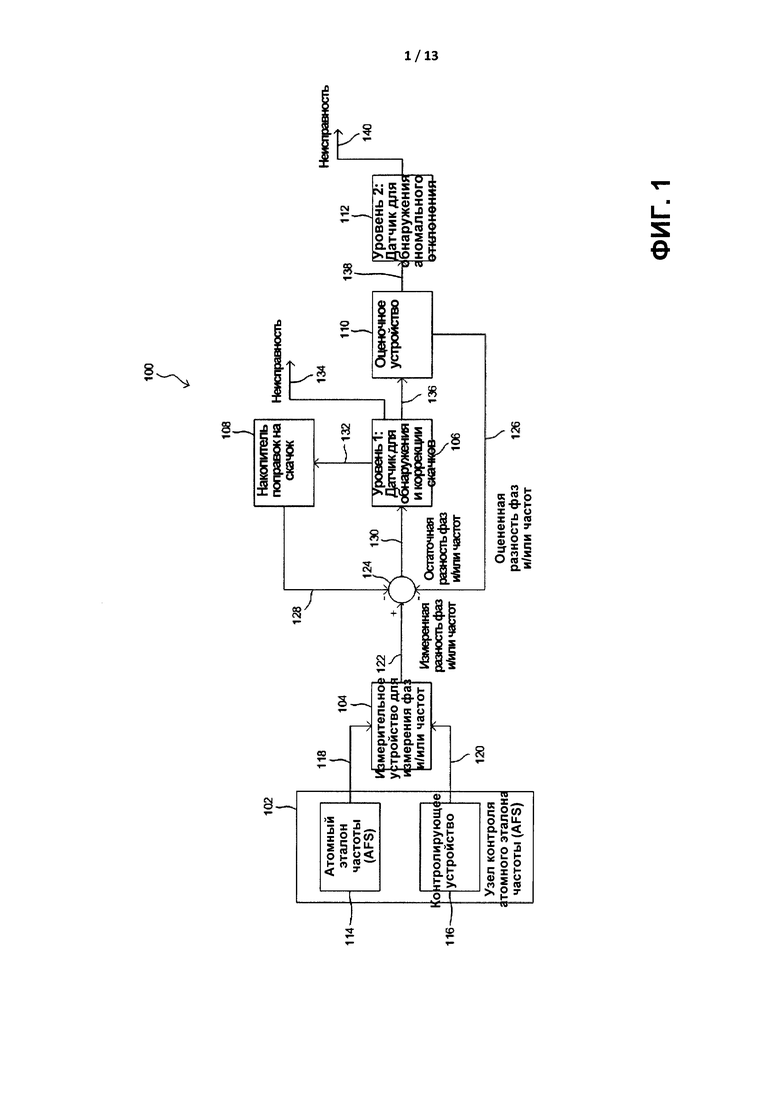
На фиг. 1 показана структурная схема иллюстративной системы 100 для контроля атомных часов. Система 100 содержит иллюстративный узел 102 контроля атомного эталона частоты (AFS), измерительное устройство 104, датчик 106 уровня 1, накопитель 108 поправок на скачок, оценочное устройство 110 и датчик 112 уровня 2.
Узел 102 контроля атомного эталона частоты (AFS) показанного примера содержит атомный эталон частоты (AFS) 114 и контролирующее устройство 116. Несмотря на то, что показано в виде узла, атомный эталон частоты (AFS) 114 и контролирующее устройство 116 могут быть реализованы в виде выполненных за одно целое устройств или могут представлять собой отдельные устройства. В некоторых примерах атомный эталон частоты (AFS) 114 представляет собой рубидиевые часы, а контролирующее устройство 116 представляет собой кварцевый генератор (СХО). В других примерах контролирующее устройство 116 представляет собой управляемый напряжением кварцевый генератор (VCXO), кварцевый генератор с числовым управлением (NCO) или сочетание из одного или большего количества кварцевых генераторов (СХО), управляемых напряжением кварцевых генераторов (VCXO) и/или кварцевых генераторов с числовым управлением (NCO). Атомный эталон частоты (AFS) 114 создает сигнал 118 атомного эталона частоты (AFS), а контролирующее устройство 116 создает сигнал 120 контролирующего устройства.
В данном примере сигнал 118 атомного эталона частоты (AFS) и сигнал 120 контролирующего устройства принимаются измерительным устройством 104. Измерительное устройство 104 может представлять собой измерительное устройство для измерения фазы и/или измерительное устройство для измерения частоты, которое измеряет разность(и) фаз и/или частот между сигналом 118 атомного эталона частоты (AFS) и сигналом 120 контролирующего устройства. Измерительное устройство 104 выдает измеренную разность(и) 122 фаз и/или частот между сигналом 118 атомного эталона частоты (AFS) и сигналом 120 контролирующего устройства.
Анализирующее устройство 124 принимает измеренную разность(и) 122 фаз и/или частот от измерительного устройства 104, оцененную разность(и) 126 фаз и/или частот от оценочного устройства 110 и накопленные корректировки 128 на скачок от накопителя 108 поправок на скачок. Анализирующее устройство 124 вычитает оцененную разность(и) 126 фаз и/или частот и накопленные корректировки 128 на скачок из измеренной разности(ей) 122 фаз и/или частот для вычисления остаточной разности(ей) 130 фаз и/или частот.
Датчик 106 уровня 1 показанного примера сравнивает остаточную разность(и) 130 фаз и/или частот с пределом для обнаружения и коррекции скачков с использованием техник анализа множества пределов и множества устойчивостей, как описано выше. Например, меньшие пределы могут требовать меньшей устойчивости (например, количество раз, когда измерение при конкретном пределе обязательно должно быть реализовано до обнаружения или индикации аномалии) для надлежащей идентификации скачков с одновременным предотвращением ложных распознаваний сигнала из-за шума. Остаточная разность фаз может быть использована для обнаружения фазовых скачков (например, датчик фазы уровня 1). В примере фазовый скачок обнаружен, если остаточная разность фаз выше предварительно определенного предела (например, рТН) при устойчивости предварительно определенного количества (например, nP) итераций. В дополнительном примере частотный скачок обнаружен, если остаточная разность частот находится выше предварительно определенного предела (например, rTH) при устойчивости предварительно определенного количества (например, nR) итераций. В некоторых примерах после обнаружения скачка, датчик 106 уровня 1 вычисляет корректировку 132 на скачок. Накопитель 108 поправок на скачок накапливает корректировки 132 на скачок и выдает накопленные корректировки 128 на скачок на анализирующее устройство 124. Кроме того, датчик 106 уровня 1 выдает индикатор 134 неисправности для индикации фазового скачка или частотного скачка. В некоторых примерах, в которых неиправности не кооректируются автоматическим образом, индикатор 134 неисправности может быть включен в навигационные сообщения для выдачи на приемники предупредительного сигнала о неисправностях в тактовом сигнале или для удаления навигационных сигналов для защиты пользователей от аномальных событий. В некоторых примерах датчик 106 уровня 1 дополнительно вычисляет откорректированную остаточную разность(и) 136 фаз и/или частот для вновь обнаруженных скачков путем удаления части остаточной разности(ей) 130 фаз и/или частот, внесенной накопленными скачками 128.
Оценочное устройство 110 показанного примера моделирует оцененную разность(и) 126 фаз и/или частот между сигналом 118 атомного эталона частоты (AFS) и сигналом 120 контролирующего устройства. В некоторых примерах оценочное устройство 110 содержит фильтр Кальмана или фильтр с постоянным коэффициентом усиления. Конкретные параметры математической модели, используемой оценочным устройством 110, подробно описаны далее. Оценочное устройство 110 принимает откорректированную остаточную разность(и) 130 фаз и/или частот от датчика 106 уровня 1, которую он использует для обновления своей модели. Оцененную разность(и) фаз и/или частот 126 выдают на анализирующее устройство 124. Оценочное устройство 110 также выдает параметр 138, связанный с его моделью оцененной разности(ей) 126 фаз и/или частот, на датчик 112 уровня 2. В примере параметр 138 представляет собой оцененный сдвиг частоты.
Датчик 112 уровня 2 принимает параметр 138 (например, оцененный сдвиг частоты), который анализируют для обнаружения более медленного, более незаметного аномального отклонения. В примере аномалию уровня 2 обнаруживают, если изменение в оценке смещения частоты за интервал времени (например, dt) выше предварительно определенного предела (drTH) при устойчивости предварительно определенного количества (например, nDR) итераций. Кроме того, датчик 112 уровня 2 выдает индикатор 140 неисправности для указания на анормальное отклонение параметра 138 (например, оцененного смещения частоты). В некоторых примерах, в которых неиправности не корректируются автоматически, индикатор 140 неисправности может быть включен в навигационные сообщения для выдачи на приемники предупредительного сигнала о неисправностях в тактовом сигнале или о других действиях, включая удаление навигационного сигнала, например может быть принят для защиты пользователя от аномального сигнала или аномальных сигналов.
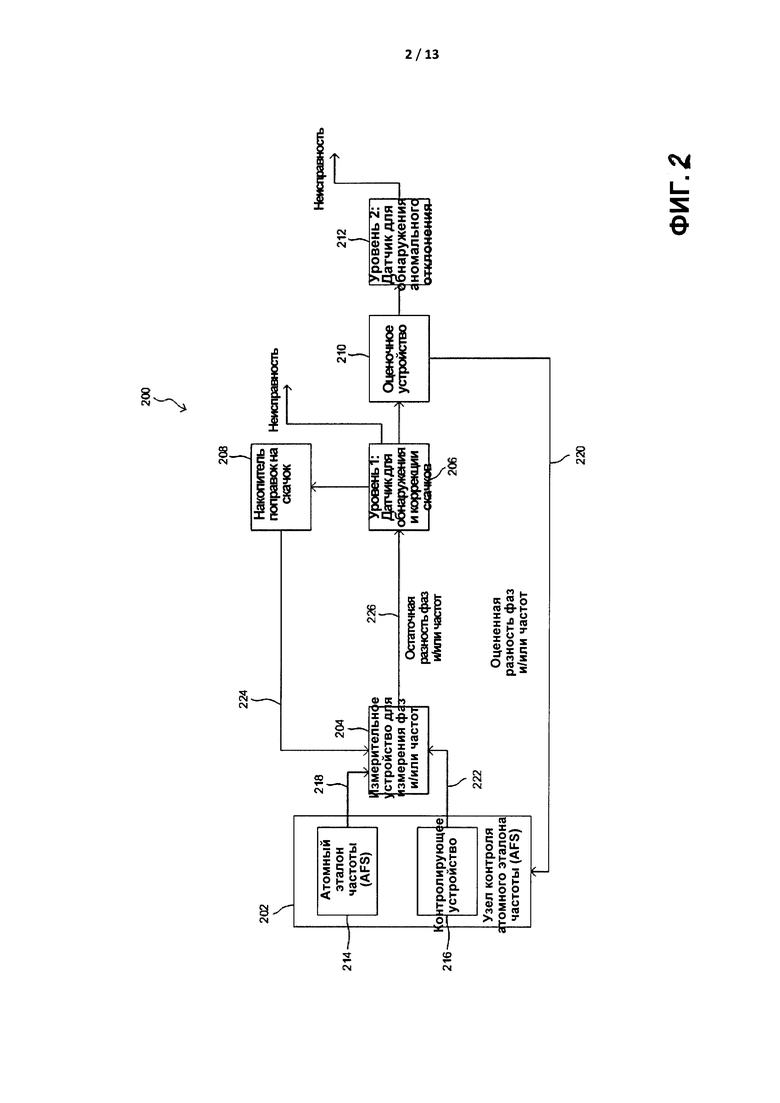
На фиг. 2 показана структурная схема еще одной иллюстративной системы 200 для контроля атомных часов. Система 200 представляет собой альтернативную конфигурацию системы 100 по фиг. 1. Система 200 по фиг. 2 иллюстрирует конфигурацию аппаратного обеспечения с обратной связью, причем система 100 по фиг. 1 использует конфигурацию программного обеспечения с обратной связью.
Система 200 по фиг. 2 содержит иллюстративный узел 202 контроля атомного эталона частоты (AFS), измерительное устройство 204, датчик 206 уровня 1 и накопитель 208 поправок на скачок, оценочное устройство 210 и датчик 212 уровня 2.
Узел 202 контроля атомного эталона частоты (AFS) содержит атомный эталон частоты (AFS) 214 и контролирующее устройство 216. В некоторых примерах атомный эталон частоты (AFS) 214 представляет собой рубидиевые часы, контролирующее устройство 216 представляет собой кварцевый генератор (СХО). В других примерах контролирующее устройство 216 представляет собой управляемый напряжением кварцевый генератор (VCXO), кварцевый генератор с числовым управлением (NCO) или сочетание из одного или большего количества кварцевых генераторов (СХО), управляемых напряжением кварцевых генераторов (VCXO) и/или кварцевых генераторов с числовым управлением (NCO). Атомный эталон частоты (AFS) 214 создает сигнал 218 атомного эталона частоты (AFS).
Узел 202 контроля атомного эталона частоты (AFS) показанного примера принимает оцененную разность(и) 220 фаз и/или частот от оценочного устройства 210. Данная конфигурация отлична от конфигурации системы 100 по фиг. 1, в которой оцененная разность(и) 126 фаз и/или частот принимается анализирующим устройством 124. Контролирующее устройство 216 из узла 202 контролирующих устройств для контроля атомного эталона частоты (AFS) принимает оцененную разность(и) 220 фаз и/или частот. Контролирующее устройство 216 создает отслеженный сигнал 222 атомного эталона частоты (AFS) на основании оцененной разности(ей) 220 фаз и/или частот.
Измерительное устройство 204 принимает сигнал 218 атомного эталона частоты (AFS), отслеженный сигнал 222 атомного эталона частоты (AFS) и накопленные корректировки 224 на скачок. Измерительное устройство 204 может представлять собой измерительное устройство для измерения фазы и/или измерительное устройство для измерения частоты, которое измеряет разности между сигналом 218 атомного эталона частоты (AFS) и отслеженным сигналом 222 атомного эталона частоты (AFS), включая накопленные корректировки 224 на скачок в отношении фазы и/или частоты. Результат данного измерения представляет собой остаточную разность(и) 226 фаз и/или частот.
Остальная структура системы 200 по фиг. 2 схожа с структурой системы 100 по фиг. 1. Таким образом, система 200 по фиг. 2 иллюстрирует альтернативную конфигурацию системы 100 по фиг. 1, которая использует аппаратную управляющую систему с обратной связью в отличие от программной управляющей системы с обратной связью для достижения таких же или схожих функциональных возможностей.
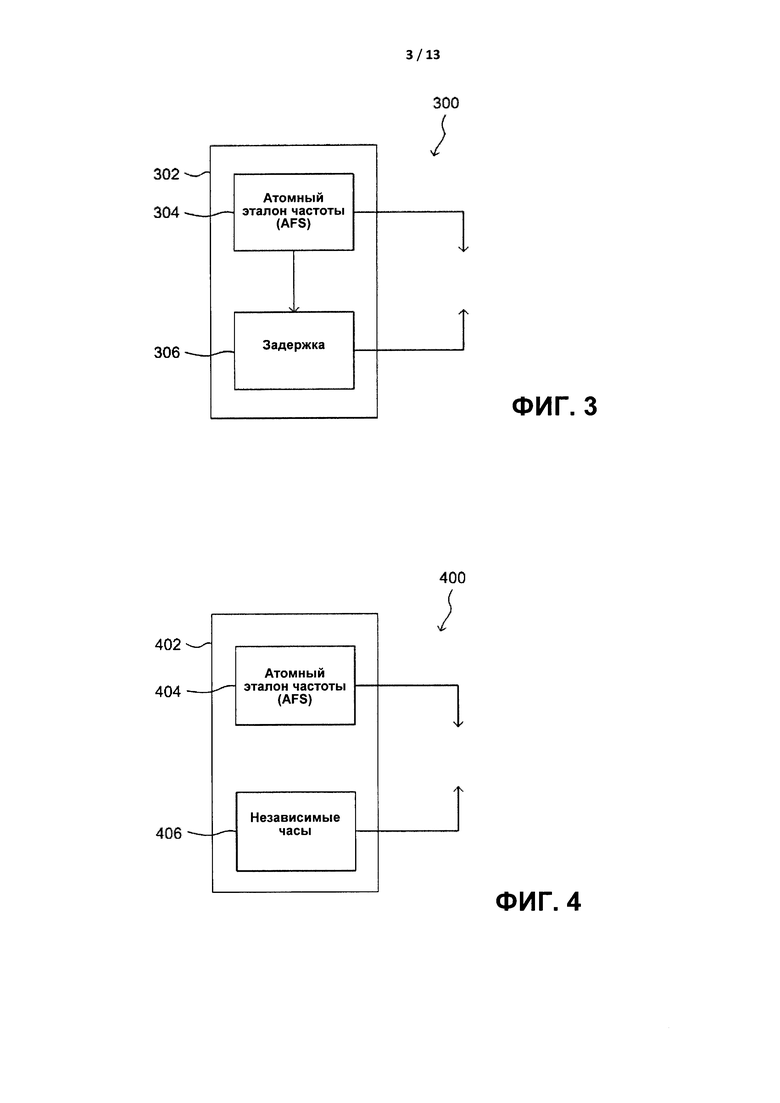
На фиг. 3 и 4 показаны иллюстративные конфигурации узла 102 и 202 контроля атомного эталона частоты (AFS) по фиг. 1 и 2, которые обеспечивают различные подходы к контролю часов. На фиг. 3 показан контроль часов с использованием конфигурации 300 на основе задержки, а на фиг. 4 показан контроль часов с использованием контролирующей конфигурации 400 на основе независимых часов.
Каждая из конфигурации на основе независимых часов и конфигурации на основе задержки выполнена с возможностью обнаружения и коррекции фазового скачка, возможностью обнаружения и коррекции частотного скачка сверх предварительно определенного предела и с возможностью проверки оцененного смещения частоты с течением времени вопреки ожиданиям. Однако некоторые конфигурации лучше подходят для конкретных применений. Например, различные конфигурации 300 на основе задержки и контролирующие конфигурации 400 на основе часов характеризуются различными техническими характеристиками в отношении краткосрочной и долгосрочной стабильности, издержек и возможности замены аппаратного обеспечения, возможности использовать существующее аппаратное обеспечения, а также в отношении механизмов погрешностей и/или неисправностей аппаратного обеспечения (например, необходимы ли схемы голосования).
На фиг. 3 показан контроль часов с использованием конфигурации 300 на основе задержки. Конфигурация 300 на основе задержки содержит иллюстративный узел 302 контроля атомного эталона частоты (AFS), содержащий атомный эталон частоты (AFS) 304 (например, рубидиевые часы) и задержанный сигнал 306 атомного эталона частоты (AFS) 304. По существу, данная конфигурация облегчает сравнение изменения фазы и частоты часов за период задержки в зависимости от задержки, которые по существу функционируют в виде краткосрочных часов. Разность фаз и частот, компенсированная известными значениями (например, значением задержки), используют для обнаружения неисправностей. Разность фаз является по существу проверкой частоты. Скачки фазы возникают в виде скачкообразных всплесков, а скачки частоты возникают в виде ступеней.
В некоторых примерах фильтр Кальмана или фильтр с постоянным коэффициентом усиления используют для оценки смещения частоты атомного эталона частоты (AFS) по отношению к точности задержки и/или погрешности атомного эталона частоты (AFS) вследствие ускорения по отношению к точности задержки. В некоторых примерах стабильность задержки может быть определена количественно, что обеспечивает возможность улучшения точности оцененного смещения частоты атомного эталона частоты (AFS).
Различные конфигурации могут быть использованы для подхода на основе задержки по фиг. 3. Первая конфигурация использует механизм задержки на основе генератора. Вторая конфигурация содержит линию задержки.
На фиг. 4 показан контроль часов с использованием контролирующей конфигурации 400 на основе независимых часов. Контролирующая конфигурация 400 на основе независимых часов содержит иллюстративный узел 402 контроля атомного эталона частоты (AFS), содержащий атомный эталон частоты (AFS) 404, такой как рубидиевые часы, и независимые часы 406, такие как кварцевый генератор (СХО). В других примерах независимые часы 406 представляет собой управляемый напряжением кварцевый генератор (VCXO), кварцевый генератор с числовым управлением (NCO) или сочетание из одного или большего количества кварцевых генераторов (СХО), управляемых напряжением кварцевых генераторов (VCXO) и/или кварцевых генераторов с числовым управлением (NCO).
Различные конфигурации могут быть использованы для подхода на основе независимых часов по фиг. 4, таких как часы, которые показаны и описаны согласно фиг. 5-7.
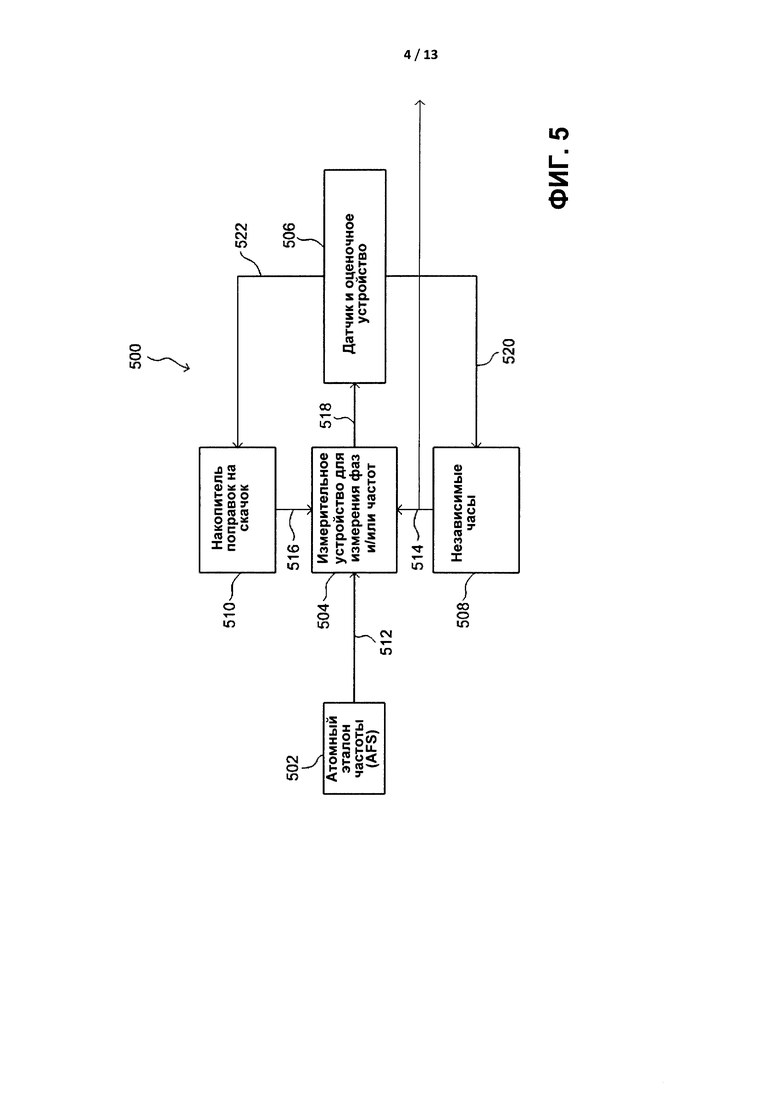
На фиг. 5 показана иллюстративная система 500 на основе независимых часов, которая использует управляемый напряжением кварцевый генератор (VCXO) или кварцевый генератор с числовым управлением (NCO). В данной конфигурации с управляемым напряжением кварцевым генератором (VCXO) или кварцевым генератором с числовым управлением (NCO) существующие часы или структура генерирования сигналов могут быть использованы для выполнения обнаружения неисправностей, изолирования неисправностей и реагирования на неисправности. Данная конфигурация обеспечивает экономию затрат по сравнению с альтернативными конфигурациями путем использования существующих компонентов.
Иллюстративная система 500 содержит атомный эталон частоты (AFS) 502, измерительное устройство 501 для измерения фазы и/или частоты, датчик и оценочное устройство 506, независимые часы 508 и накопитель 510 поправок на скачок. Атомный эталон частоты (AFS) 502 создает сигнал 512 атомного эталона частоты (AFS), который принимается измерительным устройством 504 для измерения фазы и/или частоты. Измерительное устройство 504 для измерения фазы и/или частоты также принимает скорректированный отслеженный сигнал 514 атомного эталона частоты (AFS) от независимых часов 508 и накопленные корректировки 516 на скачок от накопителя 510 поправок на скачок.
Датчик и оценочное устройство 506 моделирует оцененную разность(и) фаз и/или частот между атомным эталоном частоты (AFS) 502 и независимыми часами 508. Датчик и оценочное устройство 506 принимает остаточную разность(и) 518 фаз и/или частот от измерительного устройства 504 для измерения фазы и/или частоты, которую он использует для обновления своей модели. Датчик и оценочное устройство 506 выдает оцененную разность(и) 520 фаз и/или частот на независимые часы 508. Датчик и оценочное устройство 506 обнаруживает фазовые и/или частотные скачки на основании остаточной разности(ей) 518 фаз и/или частот, принятой от измерительного устройства 504 для измерения фазы и/или частоты. Обнаруженные фазовые и/или частотные скачки 522 выдают на накопитель 510 поправок на скачок.
Независимые часы 508 создают тактовый сигнал, который отслеживает тактовый сигнал 512 отомного эталона частоты (AFS). Независимые часы 508 затем регулируют свой тактовый сигнал (например, отслеженный сигнал атомного эталона частоты (AFS)) на основании оцененной разности(ей) 520 фаз и/или частот, принятой от датчика и оценочного устройства 506). Таким образом, независимые часы 508 выдают скорректированный отслеженный сигнал 514 атомного эталона частоты (AFS) на измерительное устройство 504 для измерения фазы и/или частоты.
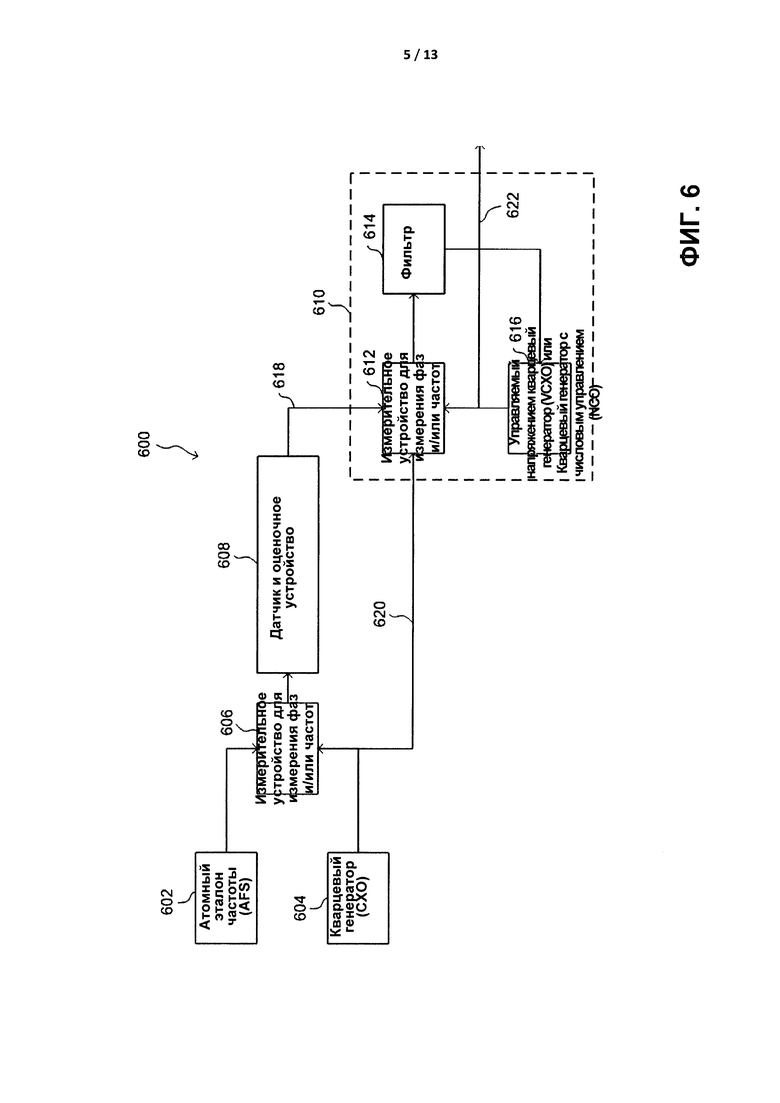
Измерительное устройство 504 принимает сигнал 512 атомного эталона частоты (AFS), скорректированный отслеженный сигнал 514 атомного эталона частоты (AFS) и накопленные корректировки 516 на скачок. Измерительное устройство 504 может представлять собой измерительное устройство для измерения фазы и/или измерительное устройство для измерения частоты, которое измеряет разность между сигналом 512 атомного эталона частоты (AFS) и скорректированным отслеженным сигналом 514 атомного эталона частоты (AFS), включая накопленные корректировки 516 на скачок, в отношении фазы и/или частоты. Результат данного измерения представляет собой остаточную разность(и) 518 фаз и/или частот. На фиг. 6 показана иллюстративная система 600 на основе независимых часов, которая использует высококачественный кварцевый генератор (СХО) вместе с относительно недорогим управляемым напряжением кварцевым генератором (VCXO) или кварцевым генератором с числовым управлением (NCO) для формирования схемы фазовой подстройки частоты. Иллюстративная система 600 содержит атомный эталон частоты (AFS) 602, кварцевый генератор (СХО) 604, который функционирует в качестве независимых часов, измерительное устройство 606 для измерения фазы и/или частоты, датчик и оценочное устройство 608 и схему 610 фазовой подстройки частоты. Схема 610 фазовой подстройки частоты содержит измерительное устройство 612 для измерения фазы и/или измерительное устройство 612 для измерения частоты, фильтр 614 (например, фильтр Кальмана или фильтр с постоянным коэффициентом усиления) и управляемый напряжением кварцевый генератор (VCXO) или кварцевый генератор с числовым управлением (NCO) 616.
Аналогично вышеописанным системам, датчик и оценочное устройство 608 выдает фазовые и/или частотные корректировки 618. Схема 610 фазовой подстройки частоты принимает фазовые и/или частотные корректировки 618 и тактовый сигнал 620, который может представлять собой тактовый сигнал атомного эталона частоты (AFS) или тактовый сигнал кварцевого генератора (СХО).
Схему 610 фазовой подстройки частоты используют в данном примере для реализации фазовых и/или частотных корректировок 618 в виде откорректированных тактовых сигналов 622. При необходимости, реализации системы 600 также включают цифро-аналоговые и аналого-цифровые преобразователи.
На фиг. 7 показана иллюстративная система 700 на основе независимых часов, которая использует высококачественный кварцевый генератор (СХО) без применения поправок. Иллюстративная система 700 аналогична системе 600 по фиг. 6 за исключением того, что система 700 не содержит схему 610 фазовой подстройки частоты. Система 700 может быть реализована в приложениях, в которых особенности контроля часов являются необходимыми, однако возможности аппаратного обеспечения ограничены. Система 700 функционирует аналогично системам, описанным выше и обеспечивает фазовые и/или частотные корректировки 702. В некоторых примерах фазовые и/или частотные корректировки 702 могут быть включены в сообщения с навигационными данными.
Дополнительно или в альтернативном варианте навигационный сигнал может быть удален для защиты пользователей, когда заданные пределы превышены.
Для каждой из вышеописанных иллюстративных конфигураций для контроля атомных часов, источник аномалий может быть идентифицирован и источник аномалий может быть изолирован, если эти аномалии не могут быть скорректированы. Некоторые примеры используют избыточность, голосование и/или другие механизмы для выполнения этих функций. В некоторых примерах избыточность предотвращена путем применения других механизмов, например путем контроля телеизмерений атомного эталона частоты (AFS), таких как напряжение лампы.
На фиг. 8 показана иллюстративная высокоуровневая структура 800 для голосования. Иллюстративная структура 800 для голосования может быть реализована в любых из вышеописанных примеров для идентификации и изолирования источников аномалий тактового сигнала. Иллюстративная структура 800 для голосования может быть реализована путем добавления дополнительных функционирующих часов в систему. В целом три или большее количество функционирующих часов используют для обнаружения и изолирования частотной или фазовой аномалии.
В некоторых примерах, если аномалия тактового сигнала в отношении фазы и частоты является достататочно небольшой, то избыточность и структуры для голосования могут быть опущены. Вместо этого, результаты обнаружения, вызванные скачками часов контролирующей системы, можно рассматривать в качестве шума. Такой шум учитывается путем изменения значений устойчивости для управления вероятностью ложных предупредительных сигналов.
Иллюстративная структура 800 для голосования содержит первые часы 802, вторые часы 804 и третьи часы 806. Первые, вторые и третьи часы 802, 804, 806 могут представлять собой любое сочетание из атомных эталонов частоты (AFS) (например, рубидиевых часов) и/или кварцевых генераторов (например кварцевые генераторы (СХО), управляемые напряжением кварцевые генераторы (VCXO) и/или NCXO). В первом примере реализации каждые из первых, вторых и третьих часов 802, 804, 806 представляют собой атомный эталон частоты (AFS). Во второй иллюстративной реализации первые и вторые часы 802, 804 представляют собой атомные эталоны частоты (AFS), а третьи часы 806 представляют собой кварцевый генератор (СХО). В третьей иллюстративной реализации первые часы 802 представляют собой атомный эталон частоты (AFS), а вторые и третьи часы 804, 806 представляют собой кварцевые генераторы (СХО). Первые часы 802 выдают первый тактовый сигнал 808, вторые часы 804 выдают второй тактовый сигнал 810, а третьи часы 806 выдает третий тактовый сигнал 812.
Иллюстративная структура 800 для голосования также содержит первый датчик на основе фильтра и корректирующее устройство 814, второй датчик на основе фильтра и корректирующее устройство 816 и третий датчик на основе фильтра и корректирующее устройство 818. Каждый из первого, второго и третьего датчиков на основе фильтров и корректирующих устройств 814, 816, 818 содержат фильтры (например, фильтр Кальмана или фильтр с постоянным коэффициентом усиления) для моделирования оцененной разности между двумя из часов, которую используют для вычисления остатка (например, разности между спрогнозированной разностью показаний часов и измеренной разностью показаний часов), который используют для обнаружения различных типов скачков. В иллюстративной структуре 800 для голосования, как показано на фиг. 8, каждый датчик на основе фильтра и корректирующее устройство соответствует двум часам. В частности, первый датчик на основе фильтра и корректирующее устройство 814 принимает первый тактовый сигнал 808 и второй тактовый сигнал 810, второй датчик на основе фильтра и корректирующее устройство 816 принимает второй тактовый сигнал 810 и третий тактовый сигнал 812, а третьий датчик на основе фильтра и корректирующее устройство 818 принимает первый тактовый сигнал 808 и третий тактовый сигнал 812.
После регистрации аномалии тактового сигнала, каждый из первого, второго и третьего датчиков на основе фильтра и корректирующих устройств 814, 816, 818 передает информацию об изололировани и голосовании на устройство 820 для голосования и изолирования. Каждые часы передают свой соответствующий тактовый сигнал на два из датчиков на основе фильтра и корректирующих устройств 814, 816, 818, если одни из часов проявляют аномалию. В итоге, два из трех датчиков на основе фильтра и корректирующих устройств 814, 816, 818 подвержены воздействию аномалии. Таким образом, часы, которые включены в обоих из датчиков на основе фильтра и корректирующих устройств 814, 816, 818, подверженных воздействию аномалии, представляют собой источник аномалии. Например, если аномалия обнаружена посредством первого и второго датчиков на основе фильтра и корректирующих устройств 814, 816, то вторые часы 802 являются неисправными, если аномалия обнаружена посредством второго и третьего датчиков на основе фильтра и корректирующих устройств 816, 818, то третьи часы 806 являются неисправными, а если аномалия обнаружена посредством первого и третьего датчиков на основе фильтра и корректирующих устройств 816, 818, то первые часы 802 являются неисправными.
После того как аномалия обнаружена, идентифицируются конкретные часы, которые представляют собой источник этой этой аномалии, корректировки могут быть применены к неисправным часам, идентифицированным посредством структуры для голосования.
Несмотря на то что иллюстративный способ реализации иллюстративных систем 100, 200, 300, 400, 500, 600 и 700 для контроля часов по фиг. 1-7 и иллюстративной структуры 800 для голосования по фиг. 8 показан на фиг. 9, один или большее количество из элементов, процессов и/или устройств, показанных на фиг. 9, могут быть объединены, разделены, переделаны, опущены, исключены и/или реализованы любым другим образом. Кроме того, иллюстративный узел 102, 202, 302, 402 контроля атомного эталона частоты (AFS), иллюстративное измерительное устройство 104, 204, 504, 606, 612, иллюстративный датчик 106, 206 уровня 1, иллюстративный накопитель 108, 208, 510 поправок на скачок, иллюстративное оценочное устройство 110, 210, иллюстративный датчик 112, 212 уровня 2, иллюстративный атомный эталон частоты (AFS) 114, 214, 304, 404, 502, 602, иллюстративное контролирующее устройство 116, 216, 306, 406, иллюстративное анализирующее устройство 124, иллюстративный датчик и оценочное устройство 506, 608, иллюстративные независимые часы 508, иллюстративный кварцевый генератор (СХО) 604, иллюстративная схема 610 фазовой подстройки частоты, иллюстративный фильтр 614, иллюстративный управляемый напряжением кварцевый генератор (VCXO) или кварцевый генератор с числовым управлением (NCO) 616, иллюстративные часы 802, 804, 806, иллюстративный датчик на основе фильтра и корректирующее устройство 814, 816, 818, иллюстративное устройство 820 для голосования и изолирования и/или, в частности, иллюстративные системы 100, 200, 300, 400, 500, 600 и 700 для контроля часов по фиг. 1-7 и иллюстративная структура 800 для голосования по фиг. 8 могут быть реализованы посредством аппаратного обеспечения, программного обеспечения, программно-аппаратного обеспечения и/или посредством любого сочетания из аппаратного обеспечения, программного обеспечения и/или программно-аппаратного обеспечения. Таким образом, например, любой из иллюстративного узла 102, 202, 302, 402 контроля атомного эталона частоты (AFS), иллюстративного измерительного устройства 104, 204, 504, 606, 612/ иллюстративного датчика 106, 206 уровня 1, иллюстративного накопителя 108, 208, 510 поправок на скачок, иллюстративного оценочного устройства 110, 210, иллюстративного датчика 112, 212 уровня 2, иллюстративного атомного эталона частоты (AFS) 114, 214, 304, 404, 502, 602, иллюстративного контролирующего устройства 116, 216, 306, 406, иллюстративного анализирующего устройства 124, иллюстративного датчика и оценочного устройства 506, 608, иллюстративных независимых часов 508, иллюстративного кварцевого генератора (СХО) 604, иллюстративной схемы 610 фазовой подстройки частоты, иллюстративного фильтра 614, иллюстративного управляемого напряжением кварцевого генератора (VCXO) или кварцевого генератора с числовым управлением (NCO) 616, иллюстративных часов 802, 804, 806, иллюстративного датчика на основе фильтра и корректирующего устройства 814, 816, 818, иллюстративного устройства 820 для голосования и изолирования и/или, в частности, иллюстративных систем 100, 200, 300, 400, 500, 600 и 700 для контроля часов по фиг. 1-7 и иллюстративной структуры 800 для голосования по фиг. 8 могут быть реализованы посредством одной или большего количества из аналоговых или цифровых схем, логических схем, программируемых процессоров, специализированных интегральных схем (ASIC), программируемых логических устройств (PLD) и/или программируемых пользователем логических устройств (FPLD). При прочтении любого из пунктов, касающихся устройства или системы, данного патента для охвата исключительно реализации программного обеспечения и/или программно-аппаратного обеспечения, по меньшей мере один из иллюстративного узла 102, 202, 302, 402 контроля атомного эталона частоты (AFS), иллюстративного измерительного устройства 104, 204, 504, 606, 612, иллюстративного датчика 106, 206 уровня 1, иллюстративного накопителя 108, 208, 510 поправок на скачок, иллюстративного оценочного устройства 110, 210, иллюстративный датчик 112, 212 уровня 2, иллюстративного атомного эталона частоты (AFS) 114, 214, 304, 404, 502, 602, иллюстративного контролирующего устройства 116, 216, 306, 406, иллюстративного анализирующего устройства 124, иллюстративного датчика и оценочного устройства 506, 608, иллюстративных независимых часов 508, иллюстративного кварцевого генератора (СХО) 604, иллюстративной схемы 610 фазовой подстройки частоты, иллюстративного фильтра 614, иллюстративного управляемого напряжением кварцевого генератора (VCXO) или кварцевого генератора с числовым управлением (NCO) 616, иллюстративных часов 802, 804, 806, иллюстративного датчика на основе фильтра и корректирующего устройства 814, 816, 818, иллюстративного устройства 820 для голосования и изолирования специально заданы в настоящей заявке для включения физического машиночитаемого запоминающего устройства или запоминающего диска, такого как память, универсальный цифровой диск (DVD), компакт-диск (CD), диск типа Blu-ray и т.д., хранящего программное обеспечение и/или аппаратное обеспечение. Кроме того, иллюстративные системы 100, 200, 300, 400, 500, 600 и 700 для контроля часов по фиг. 1-7 и иллюстративная структура 800 для голосования по фиг. 8 могут содержать один или большее количество элементов, процессов и/или устройств в дополнение к показанным на фиг. 9 или вместо них, и/или могут содержать более одного из любых или всех из показанных процессов и устройств.
Блок-схема, отображающая иллюстративный способ реализации системы 100, 200, 300, 400, 500, 600 и 700 для контроля часов по фиг. 1-7 и иллюстративной структуры 800 для голосования по фиг. 8, показана на фиг. 9. В данном примере способ может быть реализован посредством машиночитаемых инструкций, содержащих программу для выполнения процессором, таким как процессор 1612, показанный в иллюстративной процессорной платформе 1600, описанной далее согласно фиг. 16. Программа может быть реализована в программном обеспечении, хранящемся на физическом машиночитаемом носителе данных, таком как ПЗУ на компакт-диске (CD-ROM), гибкий диск, жесткий диск, универсальный цифровой диск (DVD), диск типа Blu-ray, или в памяти, связанной с процессором 1612, однако вся программа и/или ее части в альтернативном варианте могут быть выполнены устройством, отличным от процессора 1612, и/или реализованы посредством программно-аппаратного обеспечения или специализированного аппаратного обеспечения. Кроме того, несмотря на то, что иллюстративная программа описана по отношению к блок-схеме, показанной на фиг. 9, в альтернативном варианте могут быть использованы многие другие способы реализации иллюстративных систем 100, 200, 300, 400, 500, 600 и 700 для контроля часов и иллюстративной структуры 800 для голосования. Например, может быть изменен порядок выполнения блоков и/или могут быть изменены, исключены или объединены некоторые из описанных блоков.
Как описано выше, иллюстративные процессы по фиг. 9 могут быть реализованы с использованием закодированных инструкций (например, компьютерных и/или машиночитаемых инструкций), хранящихся на физическом машиночитаемом носителе данных, таком как жесткий диск, флеш-память, ПЗУ (ROM), компакт-диск (CD), универсальный цифровой диск (DVD), кеш-память, ОЗУ (RAM) и/или любое другое запоминающее устройство или запоминающий диск, в котором информация хранится в течение любой продолжительности времени (например, продолжительные периоды времени, постоянно, кратковременно, для временного буферизирования, и/или для кеширования информации). Как использовано в настоящей заявке, термин физический машиночитаемый носитель данных специально задан для включения машиночитаемого запоминающего устройства любого типа и/или запоминающего диска и для исключения распространяющихся сигналов и для исключения среды передачи данных. Как использовано в настоящей заявке, термины «физический машиночитаемый носитель данных» и «машиночитаемая среда для хранения данных» используются взаимозаменяемым образом. Дополнительно или в альтернативном варианте иллюстративные процессы по фиг. 9 могут быть реализованы с использованием закодированных инструкций (например, компьютерных и/или машиночитаемых инструкций), хранящихся на компьютере для долговременного хранения данных и/или машиночитаемом носителе данных, таком как жесткий диск, флеш-память, ПЗУ, компакт-диск, универсальный цифровой диск, кеш-память, ОЗУ и/или любое другое запоминающее устройство или запоминающий диск, в котором информация хранится в течение любой продолжительности времени (например, продолжительные периоды времени, постоянно, кратковременно, для временного буферизирования, и/или для кеширования информации). Как использовано в настоящей заявке, термин машиночитаемый носитель данных для долговременного хранения данных специально задан для включения машиночитаемого запоминающего устройства любого типа и/или запоминающего диска и для исключения распространяющихся сигналов и для исключения среды передачи данных. Как использовано в настоящей заявке, когда фраза «по меньшей мере» используется как переходный термин в вводной части пункта формулы, она является неограниченной таким же образом, как и термин «содержащий» является неограниченным.
На фиг. 9 показана блок-схема, отражающая иллюстративный способ 900 контроля сигналов атомных часов с использованием анализа множества уровней, множества пределов и множества устойчивостей. Несмотря на то что блок-схема по фиг. 9 описана по отношению к контролирующей системе 100 для контроля часов по фиг. 1, блок-схема по фиг. 9 может быть реализована с использованием любых систем 100, 200, 300, 400, 500, 600, 700 и/или 800 по фиг. 1-8.
В блоке 902 измеряют разность между атомным эталоном частоты (AFS) и контролирующим устройством. Например, в контролирующей системе 100 для контроля часов по фиг. 1 блок 902 выполняют посредством измерительного устройства 104, которое измеряет разность(и) фаз и/или частот между сигналом 118 атомного эталона частоты (AFS) и сигналом 120 контролирующего устройства.
В блоке 904 моделируют оцененную разность между атомным эталоном частоты (AFS) и контролирующим устройством. В примере оценочное устройство 110 моделирует оцененную разность(и) 126 фаз и/или частот. Оценочное устройство 110 обновляет свою модель на основании откорректированной остаточной разности(ей) 136 фаз и/или частот, принятой отдатчика 106 уровня 1.
В блоке 906 вычисляют остаточный сигнал. В примере анализирующее устройство 124 принимает измеренную разность(и) 122 фаз и/или частот, оцененную разность(и) 126 фаз и/или частот и накопленные скачки 128 и вычисляет остаточную разность(и) 130 фаз и/или частот.
В блоке 908 анализируют остаточный сигнал. В примере датчик 106 уровня 1 сравнивает остаточную разность(и) 130 фаз и/или частот с множеством пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до обнаружения или индикации скачка.
В блоке 910 обнаруживают или индицируют скачок, если остаточная остаточная разность(и) 130 фаз и/или частот превышает предел при определенной устойчивости, связанной с пределом. В примере блок 910 выполняют посредством датчика 106 уровня 1. Кроме того, датчик 106 уровня 1 выдает откорректированную остаточную разность(и) 136 фаз и/или частот путем удаления части остаточной разности(ей) 130 фаз и/или частот, внесенной скачками.
Если скачок обнаружен или индицирован в блоке 910, то в блоке 912 индицируют предупредительный сигнал о скачке. В примере предупредительный сигнал о скачке индицируют посредством индикатора 134 неисправности.
В блоке 914 накапливают скачки. В примере накопитель 108 поправок на скачок накапливает скачки и выдает накопленные скачки 128 на анализирующее устройство 124.
В блоке 915 корректируют накопленные скачки. Блок 915 выполняют, при необходимости, посредством систем, которые содержат иллюстративную систему на основе независимых часов, такую как, например, система 500. В примере измерительное устройство 504 для измерения фазы и/или частоты принимает скорректированный отслеженный сигнал 514 атомного эталона частоты (AFS) от независимых часов 508 и накопленные корректировки 516 на скачок от накопителя 510 поправок на скачок.
В блоке 916 определяют источник скачка. Блок 916 выполняют, при необходимости, посредством систем, которые содержат структуру 800 для голосования. В примере структура 800 для голосования определяет конкретные часы, которые представляют собой источник скачка.
В блоке 918 анализируют параметр модели оцененной разности. В примере датчик 112 уровня 2 сравнивает параметр модели 126 оцененной разности(ей) фаз и/или частот (например, сдвиг частоты) с множеством пределов, каждый из которых имеет соответствующую устойчивость, задающую количество раз, когда предел (например, предел отклонения) превышен до индикации или обнаружения отклонения.
В блоке 920 отклонение является обнаруженным, если параметр модели 126 оцененной разности(ей) фаз и/или частот (например, сдвиг частоты) превышает предел при устойчивости, связанной с пределом. В примере блок 920 выполняют посредством датчика 112 уровня 2.
Если отклонение не обнаружено в блоке 920, то в блоке 902 повторяют иллюстративный способ 900. Если отклонение обнаружено в блоке 920, то предупредительный сигнал об отклонении индицируют в блоке 922. В примере предупредительный сигнал об отклонении индицируют посредством индикатора 140 неисправности.
В блоке 924 определяют источник отклонения. Блок 924 выполняют, при необходимости, в системах, которые содержат структуру 800 для голосования. В примере структура 800 для голосования определяет конкретные часы, которые представляют собой источник отклонения. После выполнения блока 924 иллюстративный способ 900 повторяют в блоке 902.
Далее описаны конкретные иллюстративные математические модели, которые используются для моделирования работы часов и для обнаружения погрешностей (например, аномалий). В примере погрешность часов моделируется как система третьего порядка следующим образом:
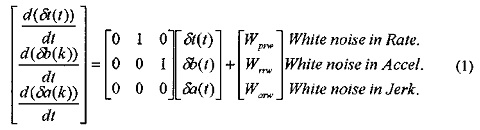
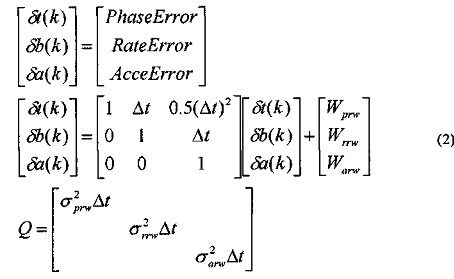
Дискретный вариант системы (1) задается следующим образом:
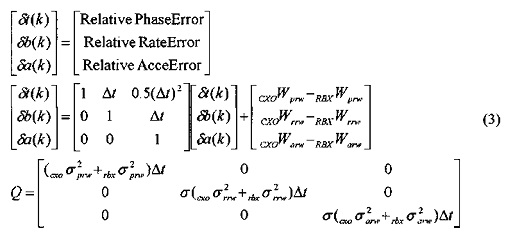
Модель относительной погрешности между этомным эталоном частоты (AFS) (например, рубидивыми часами) и кварцевым генератором (СХО) используют для построения фильтра датчика. Модель относительной погрешности задается следующим образом:
В примере, содержащем фильтр с тремя состояниями, моделируется измерительное устройство для измерения частоты (например, коэффициента частоты). Вектор состояния задается следующим образом:
Выходные данные измерительного устройства для измерения фазы выражаются следующим образом:
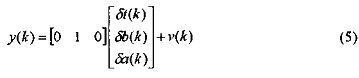
В формуле (5), v(k) представляет собой погрешность измерительного устройства для измерения тактовой частоты, которая представляет собой сочетание следующего: (i) шум при фазовом случайном блуждании (например, белый шум на тактовой частоте) кварцевого генератора (СХО), (Н) шум при фазовом случайном блуждании (например, белый шум на тактовой частоте) атомного эталона частоты (AFS), и (iii) шум измерения частоты, внесенный измерительным устройством для измерения частоты (например, показателя частоты и/или фазы). Проект иллюстративного измерительного устройства для измерения частоты использует разность выходных данных измерительного устройства для измерения фазы, поделенную на (dt). В данном проекте шум при измерении посредством измерительного устройства для измерения частоты умножается на sqrt(2)/dt для задания:

Технические характеристики часов описываются с использованием различных параметров. В примере аппроксимацию кривой графика дисперсии Алана или графика дисперсии Адамара используют для получения параметров реализуемых моделей конечноразмерного/казуального фильтра. Таким образом, "фаза мерцания/частота/ускорение" аппроксимируются другими выражениями. В частности, в примере используемые параметры содержат: (i) фазовый белый шум (q0), (ii) фазовое случайное блуждание/частотный белый шум (q1), (iii) частотное случайное блуждание/белый шум при ускорении (q2) и (iv) случайное блуждание при ускорении/белый шум при дрожании (q3).
Дисперсия Алана и дисперсия Адамара моделируются следующим образом:

В (7), q0 представляет собой дисперсию белого фазового шума (например, -1 уклон на графике AV), q1 представляет собой дисперсию белого частотного шума или фазовое случайное блуждание (например, -1/2 уклон), q2 представляет собой дисперсию частотного случайного блуждания (например, белый шум при ускорении, +1/2 уклон), a q3 представляет собой дисперсию случайного блуждания при ускорении (например, белый шум при дрожании, произвольный запуск, +3/2 уклон).
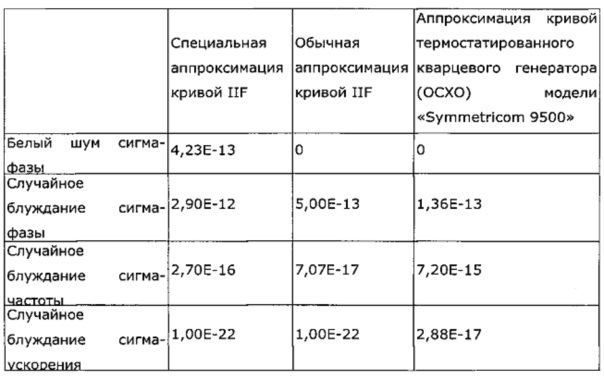
Для оценки вышеописанных моделей аппроксимация кривой была выполнена в отношении технических параметров IIF, обычных технических характеристик IIF и термостатированному кварцевому генератору (ОСХО) модели «Symmetricom 9500 В». Первая версия результатов аппроксимации кривой суммируется в приведенной далее таблице. Результаты первой версии указывают на то, что вплоть до более чем 100 секунд технические характеристики термостатированного кварцевого генератора (ОСХО) лучше, чем рубидиевые атомные часы, или сравнимы с ними.
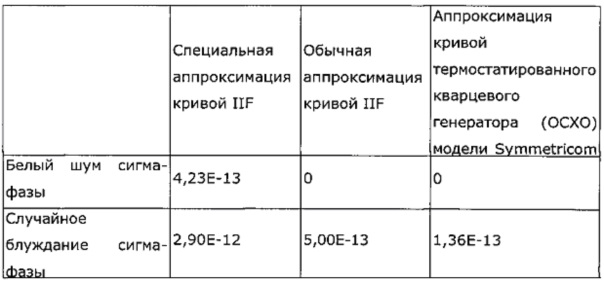
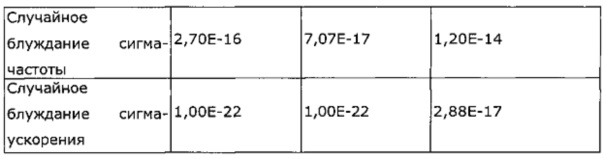
Вторая версия результатов аппроксимации кривой суммируется в приведенной далее таблице. Результаты второй версии указывают на то, что вплоть до 60 секунд технические характеристики термостатированного кварцевого генератора (ОСХО) лучше, чем рубидиевые атомные часы, или сравнимы с ними.
Цели измерительного устройства для измерения фазы и/или частоты были идентифицированы на основании анализа вероятностей. Результаты анализа указывают на то, что погрешности, превышающие 10-12 секунд и составляющие 10-12 секунд/секунду, по существу ухудшают технические характеристики контролирующей системы. Погрешности, которые меньше вышеуказанных значений, существенно не улучшают технические характеристики за счет технических характеристик атомного эталона частоты (AFS) и кварцевого генератора (СХО). Соответственно, улучшение атомного эталона частоты (AFS) и кварцевого генератора (СХО) обеспечило бы дополнительное улучшение измерительного устройства для измерения фазы и/или частоты более целесообразным образом. Следовательно, целевое требование для погрешности измерения фазы составляет 10-12 секунд, а целевое требование для погрешности измерения частоты составляет 10-12 секунд/секунду.
Для всех структурных вариантов фазовые скачки, которые больше, чем шум измерительного устройства для измерения фазы, просто обнаруживаются и корректируются, а частотные скачки, превышающие шум измерительного устройства для измерения частоты, также просто обнаруживаются и корректируются.
Различные расчеты были выполнены с использованием систем и моделей, идентифицированных выше. Для системы на основе независимых часов, шум измерительного устройства для измерения частоты предполагался на уровне сигма = 10-12 секунд/секунду. Случаи расчетов, включающие различные уровни для частотного скачка, были выполнены для обеспечения обнаружения посредством проверок уровня 1 и уровня 2.
Для системы на основе задержек шум измерительного устройства для измерения фазы предполагался на уровне в 10-12 секунд, а получаемый шум при измерении предполагался в 10-12 секунд для задержки в 1 секунду. Случаи рассчетов, включающие различные уровни для скачка частоты, были выполнены для обеспечения обнаружения посредством проверок уровня 1 и уровня 2.
Кроме того, вероятностный анализ был выполнен для скачков частоты уровня 1 для системы на основе задержки и системы на основе независимых часов. Кроме того, вероятностный анализ был выполнен для обнаружения уровня 2 на основе оцененного смещения частоты.
Были проанализированы результаты прямого обнаружения на основе измерения частоты, причем управляемый напряжением кварцевый генератор (VCXO) был использован для генерирования периода выборки mT. Период выборки mT сам по себе имеет шум, представляемый следующим образом:

соответственно, сдвиг тактовой частоты составляет порядка:

При условии, что хорошая калибровка и b=0, то сдвиг частоты в 1 секунду представляет собой:
Таким образом, сдвиг частоты составляет преимущественно 10-12 секунд/секунду. В отношении обнаружения 6-сигма, изменения могут быть обнаружены свыше 6•10-12, а для обнаружения 3-сигма, изменения могут быть обнаружены свыше 3•10-12.
Математическая модель была разработана для часов в подходе обновления тактовой частоты в следующем виде:
Для данного подхода измерения используют две стратегии измерения. Во-первых, если предполагается, что атомный эталон частоты (AFS) имеет погрешности, то в погрешность измерения, содержащую фазовую погрешность кварцевого генератора (СХО), фазовую погрешность атомного эталона частоты (AFS) и погрешность измерительного устройства для измерения фазы, включаются три источника погрешностей. Во-вторых, если допускать, что атомный эталон частоты (AFS) является идеальным, то кварцевый генератор (СХО) синхронизируется с ним, а фазовая погрешность атомного эталона частоты (AFS) не будет включена.
Для определения соображений по оптимизации параметров были идентифицированы и проанализированы основные параметры. Основные параметры, которые были идентфицированы, содержат: (1) среднюю продолжительность/выходную частоту для измерений частоты/тактовой частоты, (2) результаты обнаружения предела и (3) результаты обнаружения устойчивости.
Для средней продолжительности/выходной частоты для измерений частоты/тактовой частоты, было обнаружено, что более длительная средняя продолжительность уменьшает шум. Однако 5,2 секунд времени обнаружения и устойчивость ограничивают данное значение.
В отношении предела обнаружения было выявлено, чо меньший предел облегчает обнаружение, однако приводит к большему количеству случаев ложных предупредительных сигналов. В отличие от этого, больший предел приводит к высокой выроятности ошибочного обнаружения. Соответственно, небольшой предел с определенной устойчивостью обычно обеспечивает лучшее решение.
Было выявлено, что устойчивость обнаружения задается посредством требований к ложным предупредительным сигналам. Однако, 5.2 секунд времени обнаружения обеспечивает только неполнодоступную устойчивость.
Симуляция и анализ указывают на то, вероятность обнаружения улучшена путем использования меньшего предела с определенной устойчивостью, что уменьшает ложные предупредительные сигналы. Таким образом, устойчивость из четырех (например, четырех измерений при конкретном пределе обязательно должны быть реализованы до того, как обнаружена аномалия) была выбрана для симуляции и анализа. Таким образом, средняя продолжительность должна составлять приблизительно 1 секунду, принимая во внимание требование по времени обнаружения в 5,2 секунды, при условии, что амплитуда частотного скачка может быть неограниченной. Таким образом, значение, составляющее 1 секунду, было выбрано для симуляции и анализа. Следовательно, предел был выбран в 2* сигма остатка для увеличения вероятности обнаружения.
Вероятность обнаружения и ложные предупредительные сигналы моделируется следующим образом:

В примере,

Следовательно,

При применении (14):
Для β>α

Результаты рассчетов вероятностей указывают на то, если аномалия была измерена свыше предела четыре последовательных раза, то оно является обнаруженной. При условии что вероятность для отсчета находится свыше предела Р, то вероятность обнаружения составляет: Р4. Соответственно, вероятность ошибочного обнаружения составляет:
Другими словами, система обязательно должна терпеть неудачу при обнаружении аномалии во всех "n" попытках для того, чтобы аномалия продолжало оставаться необнаруженным. Кроме того, до тех пор пока аномалия не будет скорректирована, система продолжит пытаться ее обнаружить.
Было проанализировано воздействие ложных предупредительных сигналов и ошибочных обнаружений. В некоторых ситуациях, поскольку скачки обнаруживают и корректируют одновременно, ложные предупредительные сигналы эффективным образом уменьшаются до ложных корреккций. Поскольку ложные предупредительные сигналы вызваны частотными данными с низкоуровневыми аномалиями, то эти корректировки являются обычно очень небольшими и в целом безвредными. Однако, в некоторых примерах ложные и/или многочисленные обнаружения фазы и частоты могут привести к недоступности услуги.
Пропуск обнаружения имеет место вследствие аномалий/ характеризующихся очень небольшими частотными скачками, для которых отличительный признак сложно идентифицировать от остатка на фильте (например, фильтре Кальмана). Однако даже небольшой необнаруженный постоянный скачок может создать большую погрешность с течением времени. Таким образом, ошибочные обнаружения в целом нежелательны вследствие накопления погрешностей. Таким образом, может быть необходимо уменьшить вероятность ошибочного обнаружения путем обеспечения более высокой вероятности ложного предупредительного сигнала. В некоторых примерах в структуре "обнаружения/корректировки" ложные предупредительные сигналы, как описано ранее, могут быть неопасны. Вероятность ошибочного обнаружения по существу ограничена точностью измерительного устройства для измерения частоты и кратковременной стабильностью варцевого генератора (СХО).
На фиг. 10-14 показан скачок тактовой частоты в 3•10-12 секунд, который обнаружен датчиком уровня 1. Графики по фиг. 10-14 представляют собой иллюстративные результаты измерений системы 100, 200, 500, 600 или 700. На фиг. 10 показан график исходной остаточной разности частот. По отношению к системе 100 по фиг. 1, исходная остаточная разность частот по фиг. 10 отражает остаточную разность 130 частот, которая не содержит корректировки 128 на скачок. В момент времени приблизительно 3600 секунд посредством датчика уровня 1 был обнаружен скачок частоты, составляющий 3•10-12 секунд. На фиг. 11 показана остаточная разность 130 частот, содержащая корректировки 128 на скачок. Как показано на фиг. 11, остаточное явление существенно улучшено после введения корректировки на скачок.
На фиг. 12 и 13 показан оцененный сдвиг часов. На фиг. 12 показан оцененный сдвиг часов без введения поправок на скачок, а на фиг. 13 показан оцененный сдвиг часов, содержащий корректировки на скачок. Как показано на фиг. 13, оцененный сдвиг часов существенно улучшен после введения корректировки на скачок.
На фиг. 14 показана остаточная разность частот с течением времени. Фиг. 14 содержит предел 1402 в 2 сигма. На фиг. 14 показано, что анализ сигнала в отношении устойчивости по отношению к заданным значениям предела целесообразен для идентификации погрешностей с одновременным уменьшением вероятности ложных предупредительных сигналов. Пример по фиг. 14 использует устойчивость в 4 при пределе 1402 в 2 сигма. Вершину при приблизительно 3600 секундах идентифицируют в качестве аномалии, поскольку это четвертый результат измерения свыше предела 1402. Дополнительно или в альтернативном варианте вершина при приблизительно 3600 секундах мог бы быть идентифицирована посредством более высокого предела с меньшей устойчивостью.
На фиг. 15 показан скачок тактовой частоты, который не был обнаружен посредством датчика уровня 1, но вызвал отклонение, которое было обнаружено датчиком уровня 2. В частности, на фиг. 15 показан оцененный сдвиг частоты за период времени, составляющий 60 секунд. В данном примере скачок, составляющий приблизительно 10-12 секунд в секунду, вызвал отклонение сдвига частоты, которое превысило предварительно определенный предел, что указывает на аномальное отклонение тактового сигнала. Таким образом, на фиг. 15 показано, что датчик уровня 2 выполнен с возможностью обнаружения некоторых небольших аномалий, которые не обнаруживаются датчиком уровня 1.
На фиг. 16 показана структурная схема иллюстративной процессорной платформы 1600, выполненной с возможностью выполнения инструкций по фиг. 9 для реализации систем 100, 200, 300, 400, 500, 600 и 700 для контроля часов и иллюстративной структуры 800 для голосования по фиг. 1-8. Процессорная платформа 1600 может представлять собой, например, компьютерный процессор, программируемую пользователем логическую матрицу (FPGA) или специализированную интегральную схему (ASIC), сервер, персональный компьютер, мобильное устройство (например, мобильный телефон, смартфон, планшет, такой как планшет iPad™), персональный цифровой органайзер (PDA), устройство с доступом к сети Интернет, проигрыватель цифровых видео-дисков (DVD), проигрыватель компакт-дисков (CD), записывающее устройство для записи цифровых видеоданных, проигрыватель Blu-ray, игровую консоль, персональное записывающее устройство для записи видеоданных, телеприставку или любой другой вид вычислительного устройства.
Процессорная платформа 1600 показанного примера содержит процессор 1612. Процессор 1612 показанного примера представляет собой аппаратное обеспечение. Например, процессор 1612 может быть реализован посредством одной или большего количества интегральных схем, логических схем, микропроцессоров или контроллеров из любой необходимой серии или любого производителя.
Процессор 1612 показанного примера содержит локальную память 1613 (например, кеш-память). Процессор 1612 показанного примера сообщается с основной памятью, содержащей энергозависимую память 1614 и энергонезависимую память 1616, посредством шины 1618. Энергозависимая память 1614 может быть реализована посредством синхронной динамической ОЗУ (SDRAM), динамического оперативного запоминающего устройства (DRAM), динамического оперативного запоминающего устройства с RAMBUS (RDRAM) и/или любого другого типа оперативного запоминающего устройства. Энергонезависимая память 1616 может быть реализована посредством флеш-памяти и/или любого другого необходимого типа запоминающего устройства. Доступ к основной памяти 1614, 1616 управляется контроллером памяти.
Процессорная платформа 1600 показанного примера также содержит интерфейсную схему 1620. Интерфейсная схема 1620 может быть реализована посредством любого типа стандарта интерфейса, такого как Интернет интерфейс, универсальная последовательная шина (USB) и/или интерфейс шины «РС1 express».
В показанном примере одно или большее количество устройств 1622 ввода соединены с интерфейсной схемой 1620. Устройство 1622 ввода или устройства 1622 ввода обеспечивает или обеспечивают возможность ввода пользователем данных и команд в процессор 1612. Устройство ввода или устройства ввода соответственно может быть реализовано или могут быть реализованы посредством, например, датчика звука, микрофона, камеры (фото или видео), клавиатуры, кнопки, манипулятора типа мышь, сенсорного экрана, сенсорного планшета, шарового манипулятора, изоточки (isopoint) и/или системы распознавания голоса.
Одно или большее количество устройств 1624 вывода также соединены с интерфейсной схемой 1620 показанного примера. Устройства 1624 вывода могут быть реализованы, например, посредством дисплейных устройств (например, светодиода (LED), органического светодиода (OLED), жидкокристаллического дисплея, дисплея на электронно-лучевой трубке (CRT), сенсорного экрана, тактильного устройства вывода, светодиода (LED), принтера и/или динамиков). Интерфейсная схема 1620 показанного примера, таким образом, обычно содержит графическую карту, графический чип или графический процессор.
Интерфейсная схема 1620 показанного примера также содержит устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевая интерфейсная карта для облегчения обмена данными с внешними устройствами (например, вычислительными устройствами любого типа) посредством сети 1626 (например, соединения Интернет, цифровой абонентской линии (DSL), телефонной линии, коаксиального кабеля, сотовой телефонной системы и т.д.).
Процессорная платформа 1600 показанного примера также содержит одно или большее количество запоминающих устройств 1628 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 1628 большой емкости содержат дисковод для гибких дисков, накопители на жествих дисках, дисководы для компакт-дисков, дисководы для дисков типа «Blu-гау», RAID системы и дисководы для универсальных цифровых дисков (DVD).
Закодированные инструкции 1632 по фиг. 9 могут быть сохранены в запоминающем устройстве 1628 большой емкости в энергозависимой памяти 1614, энергонезависимой памяти 1616 и/или на удаляемом физическом машиночитаемом носителе данных, таком как компакт-диск (CD) или цифровой видео-диск (DVD), такой как программируемое постоянное запоминающее устройство (PROM), флеш-память или электрически стираемое программируемое постоянное запоминающее устройство (EEPROM).
Из приведенного выше описания будет очевидно, что вышеописанные способы, устройство и изделия промышленного производства применяют инновационные технологии анализа для обеспечения комплексных возможностей по контролю атомных часов, которые находятся за пределами возможностей известных систем. Путем использования многоуровневого обнаружения и и анализа множества пределов и множества устойчивостей для каждого уровня обнаружения, отклонения атомных часов от нормы могут быть обнаружены и скорректированы на уровнях, которые ранее были нерегистрируемыми на борту спутников глобальных навигационных спутниковых систем (GNSS).
Несмотря на то, что в настоящей заявке были описаны некоторые иллюстративные способы, устройство и изделия промышленного производства, объем защиты данного патента не ограничен ими. Наоборот, данный патент охватывает все способы, устройство и изделия промышленного производства, находящиеся в пределах объема формулы изобретения данного патента.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ГЛОБАЛЬНАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2024 |
|
RU2833299C1 |
| СПОСОБ КОМПЕНСАЦИИ СКАЧКОВ ОПОРНОГО СИГНАЛА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2006 |
|
RU2321167C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНИВАНИЯ ПОЛОЖЕНИЯ С КОМПЕНСАЦИЕЙ СМЕЩЕНИЯ | 2011 |
|
RU2567501C2 |
| ПЕРЕДАТЧИК НАВИГАЦИОННОГО СИГНАЛА И СПОСОБ ГЕНЕРАЦИИ НАВИГАЦИОННОГО СИГНАЛА | 2011 |
|
RU2558668C2 |
| ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОИСКА И ДИАГНОСТИКИ ПОДЗЕМНЫХ КОММУНИКАЦИЙ | 2009 |
|
RU2414719C1 |
| СИСТЕМА И/ИЛИ СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2007 |
|
RU2431866C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОРРЕКЦИЙ ЧАСОВ | 2012 |
|
RU2574333C2 |
| ГЛОБАЛЬНАЯ ВЫСОКОСКОРОСТНАЯ ТЕЛЕКОММУНИКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2166234C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля атомных часов глобальной системы определения местоположения (GPS) или глобальной навигационной спутниковой системы (GNSS). Технический результат - повышение точности. Для этого способ включает установление измеренной разности между атомным эталоном частоты (AFS) и контролирующим устройством. Способ также включает моделирование модели оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством и вычисление остаточного сигнала на основании измеренной разности и модели оцененной разности. При этом с помощью первого датчика осуществляют анализ остаточного сигнала во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации одного или большего количества из следующего: фазовый скачок, частотный скачок и погрешность вследствие ускорения. Кроме того, с помощью второго датчика осуществляют анализ параметра модели оцененной разности во множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела отклонения до индикации отклонения. 2 н. и 13 з.п. ф-лы, 16 ил.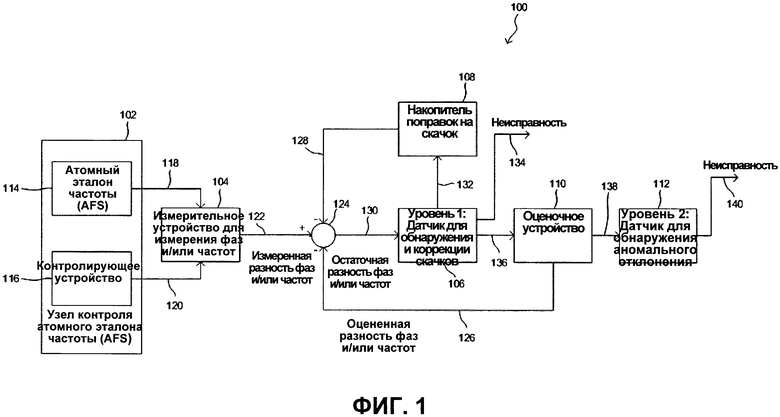
1. Способ контроля атомных часов, согласно которому:
устанавливают измеренную разность между атомным эталоном частоты (AFS) и контролирующим устройством,
моделируют модель оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством,
вычисляют остаточный сигнал на основании измеренной разности и модели оцененной разности,
анализируют, посредством первого датчика, остаточный сигнал на множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации фазового скачка, частотного скачка и/или погрешности вследствие ускорения, и
анализируют, посредством второго датчика, параметр модели оцененной разности на множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую указанное количество превышений предела отклонения до индикации отклонения.
2. Способ по п. 1, дополнительно включающий определение, посредством структуры для голосования, источника скачка или источника отклонения.
3. Способ по п. 1 или 2, согласно которому параметр представляет собой сдвиг частоты.
4. Способ по любому из пп. 1-2, согласно которому контролирующее устройство представляет собой независимые часы.
5. Способ по любому из пп. 1-2, согласно которому независимые часы представляют собой управляемый напряжением генератор или генератор с числовым управлением.
6. Способ по п. 4, согласно которому независимые часы представляют собой кварцевый генератор и управляемый напряжением генератор или генератор с числовым управлением.
7. Способ по п. 4, согласно которому независимые часы представляют собой кварцевый генератор.
8. Способ по любому из пп. 1-2 и 6-7, согласно которому контролирующее устройство представляет собой тактовый сигнал с задержкой атомного эталона частоты (AFS).
9. Способ по п. 8, согласно которому тактовый сигнал с задержкой создают с использованием механизма задержки на основе генератора.
10. Способ по п. 8, согласно которому тактовый сигнал с задержкой создают с использованием линии задержки.
11. Устройство для контроля атомных часов, содержащее:
измерительное устройство для измерения разности между атомным эталоном частоты (AFS) и контролирующим устройством,
оценочное устройство для моделирования оцененной разности между атомным эталоном частоты (AFS) и контролирующим устройством,
анализирующее устройство для вычисления остаточного сигнала на основании измеренной разности и оцененной разности,
первый датчик для анализа остаточного сигнала на множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую количество превышений предела до индикации фазового скачка, частотного скачка и/или погрешности вследствие ускорения, и
второй датчик для анализа параметра оцененной разности на множестве пределов, каждый из которых имеет соответствующую устойчивость, задающую указанное количество превышений предела отклонения до индикации отклонения.12. Устройство по п. 11, дополнительно содержащее структуру для голосования для определения источника скачка или источника отклонения.
13. Устройство по п. 11 или 12, в котором параметр представляет собой сдвиг частоты.
14. Устройство по любому из пп. 11-12, в котором контролирующее устройство представляет собой независимые часы.
15. Устройство по любому из пп. 11-12, в котором контролирующее устройство представляет собой тактовый сигнал с задержкой атомного эталона частоты (AFS).
| US 5274545 A1, 28.12.1993 | |||
| US 20050114023 А1, 26.05.2005 | |||
| US 20060074558 A1, 06.04.2006 | |||
| US 20100249566 А1, 30.09.2010 | |||
| US 20100240968 A1, 23.09.2010 | |||
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |
| Многоканальная система сбора и обработки данных в интерактивных системах программного управления, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| - М.: СОЛОН-ПРЕСС, 2014. | |||

