Предлагаемое изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов.
Во время эксплуатации ЭМ клапанов существует риск, что температура провода обмотки клапана превысит максимально допустимую температуру. Это может привести к разрушению изоляции провода обмотки ЭМ клапана и нарушению вследствие этого его функционирования. Для предотвращения этого, как известно [1], измеряют значение температуры, характеризующее температуру обмотки, например, с помощью температурного датчика, установленного на корпусе ЭМ клапана. Однако, у этой процедуры есть существенный недостаток, заключающийся в том, что температура, имеренная температурным датчиком, установленным на корпусе ЭМ клапана, не соответствует фактической температуре провода обмотки.
Известны способы определения температуры обмотки, основанные на анализе характера изменения тока обмотки ЭМ. Например, в [2] раскрывается способ индикации изменения температуры соленоида, управляющего движущейся частью привода. При применении способа обеспечивается измерение тока соленоида в режиме удержания. Переходная характеристика измеряемого тока соленоида определяется во время, когда ток в обмотке падает между первым предопределенным значением и вторым предопределенным значением. Кроме того, определяется изменение переходного процесса во времени, и сигнал, соответствующий измеренному значению температуры обмотки, генерируется в зависимости от обнаружения характерного изменения, превышающего предопределенный порог. Данный способ требует сравнения полученного переходного процесса с набором предопределенных характеристик, связанных с температурой соленоида, выбора соответствующего переходного процесса из набора предопределенных характеристик, которые имеют предопределенный диапазон изменения и формирования сигнала температуры, который отображает значение температуры, соответствующее выбранному определенному переходному процессу. При этом требуется хранение большого набора опорных характеристик, количество которых будет определяться дискретностью определения температуры. Кроме того, на характер падения тока будет влиять не только изменение сопротивления, но и изменение индуктивности обмотки ЭМ, обусловленное различными дестабилизирующими факторами, например, изменением паразитных зазоров магнитной цепи.
Также известен способ мониторинга температуры обмотки, основанный на контроле скорости нарастания тока при включении клапана. Данное техническое решение описано в [3, 4 и 1] и принято за прототип. В этом способе мониторинга температуры обмотки катушки ЭМ используется управляющий сигнал, который имеет рабочие циклы, состоящие из стартового импульса заданной продолжительности, вызывающего увеличение тока в обмотке катушки ЭМ, и последовательности импульсов, которая формируется после окончания стартового импульса и служит для обеспечения работы ЭМ в режиме удержания. Величина тока, протекающего через обмотку катушки ЭМ, измеряется в два фиксированных относительно начала рабочего цикла момента времени в период возрастания тока, а затем вычисляется градиент тока по измеренным значениям тока. Предопределенное пороговое значение для градиента тока сравнивается с вычисленным градиентом тока, и делается вывод о текущем значении температуры обмотки.
Недостатком данного способа является то, что скорость нарастания тока при включении ЭМ будет зависеть не только от величин сопротивления и индуктивности обмотки, но и от напряжения питания устройства, изменение которого будет влиять на точность определения температуры обмотки.
Задачами предполагаемого изобретения являются повышение точности и помехозащищенности определения температуры за счет исключения влияния изменения индуктивности и напряжения питания на результат измерения, а также снижение требований к производительности микроконтроллера (МК) и объему необходимой памяти.
Для решения поставленной задачи предлагается, как и в прототипе, использовать управляющие сигналы рабочего цикла ЭМ, содержащего участок срабатывания и участок удержания. Причем на участке удержания формируют управляющий сигнал импульсной модуляции и, таким образом, стабилизируют ток через обмотку электромагнитного клапана на уровне, необходимом для гарантированного удержания электромагнита во включенном состоянии. Подобный режим управления, использующий для обеспечения режима удержания широтно-импульсную модуляцию, описан, например, в [5].
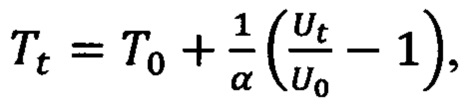
На участке удержания, при установившемся среднем значении тока в обмотке, определяют среднее значение напряжения на обмотке, сохраняют это значение, полученное при первом включении электромагнита, когда температура обмотки равна известному значению температуры окружающей среды, которое также сохраняют. В каждом последующем рабочем цикле определяют текущее среднее значение напряжения на обмотке на участке удержания и определяют значение температуры обмотки в текущем рабочем цикле по формуле

где Tt - значение температуры обмотки в текущем рабочем цикле;
Т0 - значение температуры окружающей среды в первом рабочем цикле;
U0 - среднее значение напряжения на обмотке в первом рабочем цикле;
Ut - среднее значение напряжения на обмотке в текущем рабочем цикле;
α - температурный коэффициент сопротивления провода обмотки.
Среднее значение напряжения на обмотке ЭМ определяют, например, как среднее арифметическое между максимальным и минимальным значениями сглаженного фильтром нижних частот напряжения на обмотке.
Для расширения функциональных возможностей способа сигнал, соответствующий значению температуры обмотки в текущем рабочем цикле, передают внешним устройствам. Кроме того, дополнительно сравнивают значение температуры обмотки в текущем рабочем цикле с допустимым предопределенным пороговым значением и, при превышении температурой обмотки допустимого предопределенного порогового значения, формируют сигнал, являющийся признаком перегрева обмотки ЭМ. Этот сигнал также передают внешним устройствам.
Для решения поставленной задачи в блок управления устройства дополнительно введены приемопередатчик RS-485, связанный двунаправленными линиями с микроконтроллером и внешними устройствами, и выполненный в виде последовательно соединенных первого фильтра нижних частот, усилителя и второго фильтра нижних частот измеритель среднего значения напряжения на обмотке электромагнита, вход которого соединен с выходом ключа. При этом микроконтроллер содержит модули центрального процессора, памяти, универсального асинхронного приемопередатчика, импульсного модулятора, аналогово-цифрового преобразователя, таймера и коммутатора. Причем первый вход коммутатора соединен с выходом измерителя тока, второй вход коммутатора соединен с выходом измерителя среднего значения напряжения, а его управляющий вход с первым управляющим выходом центрального процессора. Выход коммутатора соединен с входом аналогово-цифрового преобразователя, выход которого соединен с информационным входом центрального процессора, второй управляющий выход которого соединен с входом импульсного модулятора, выход которого соединен с управляющим входом ключа и входом прерывания центрального процессора. Кроме того, центральный процессор соединен двунаправленными линиями связи с модулями универсального асинхронного приемопередатчика, памяти и таймера, а управляющий вход центрального процессора, являющийся управляющим входом микроконтроллера, соединен с дискретным выходом системы верхнего уровня.
Сущность предлагаемого технического решения поясняется чертежами.
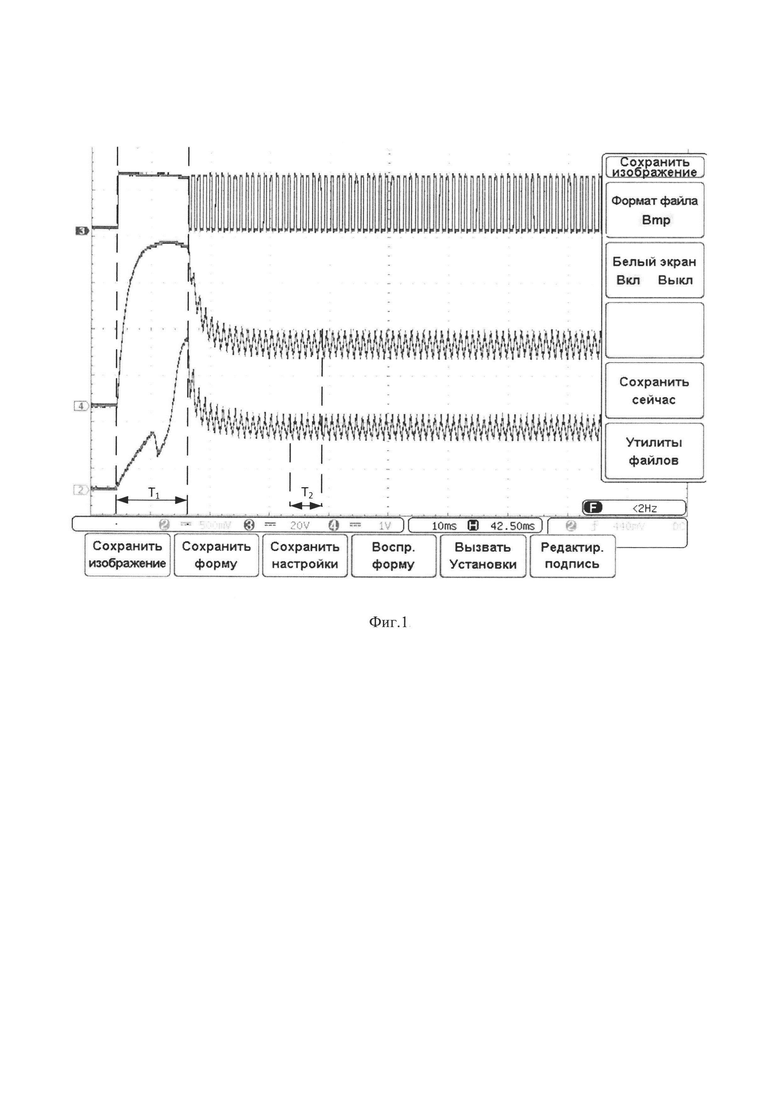
Фиг. 1. Полученные на экране осциллографа переходные процессы изменения в течение рабочего цикла параметров ЭМ, влияющих на определение температуры.
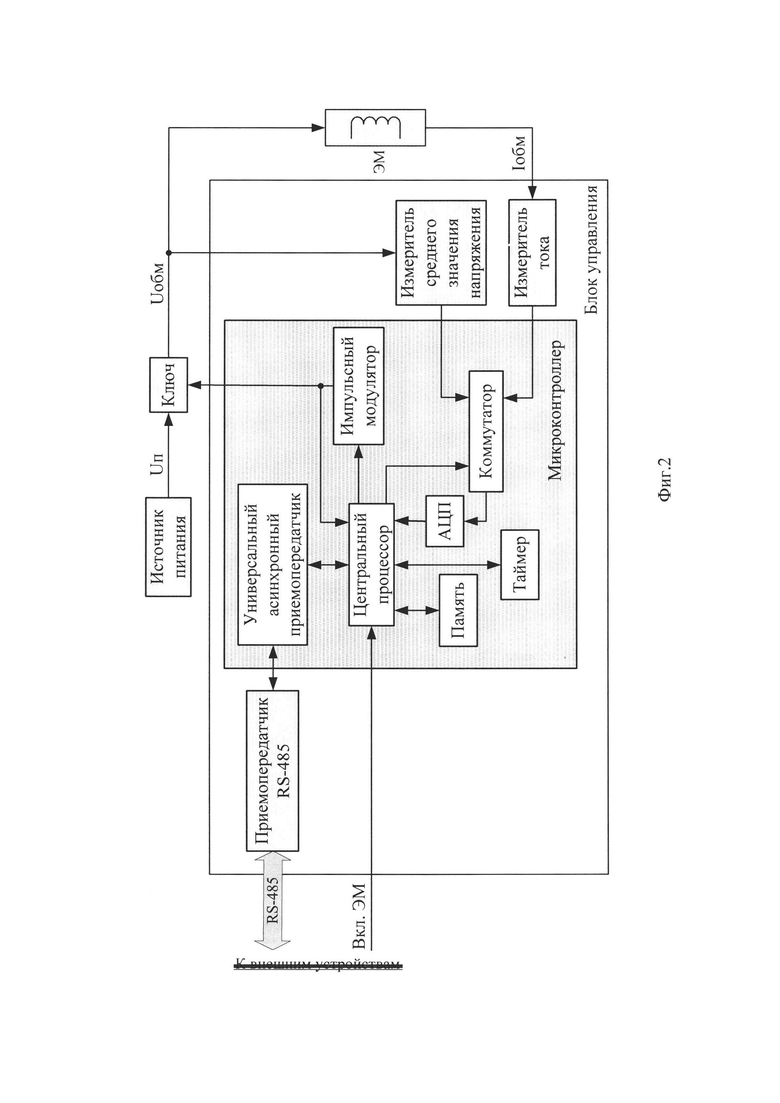
Фиг. 2. Функциональная схема устройства для мониторинга температуры обмотки электромагнита.
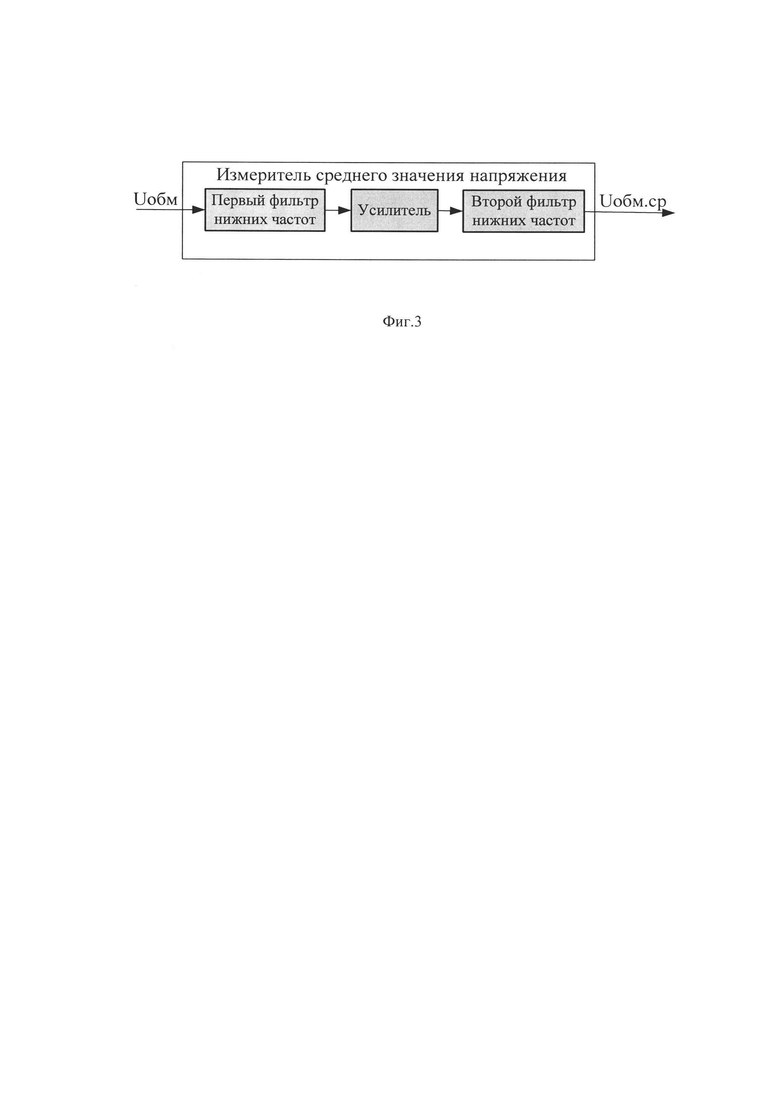
Фиг. 3. Функциональная схема измерителя среднего значения напряжения на обмотке электромагнита.
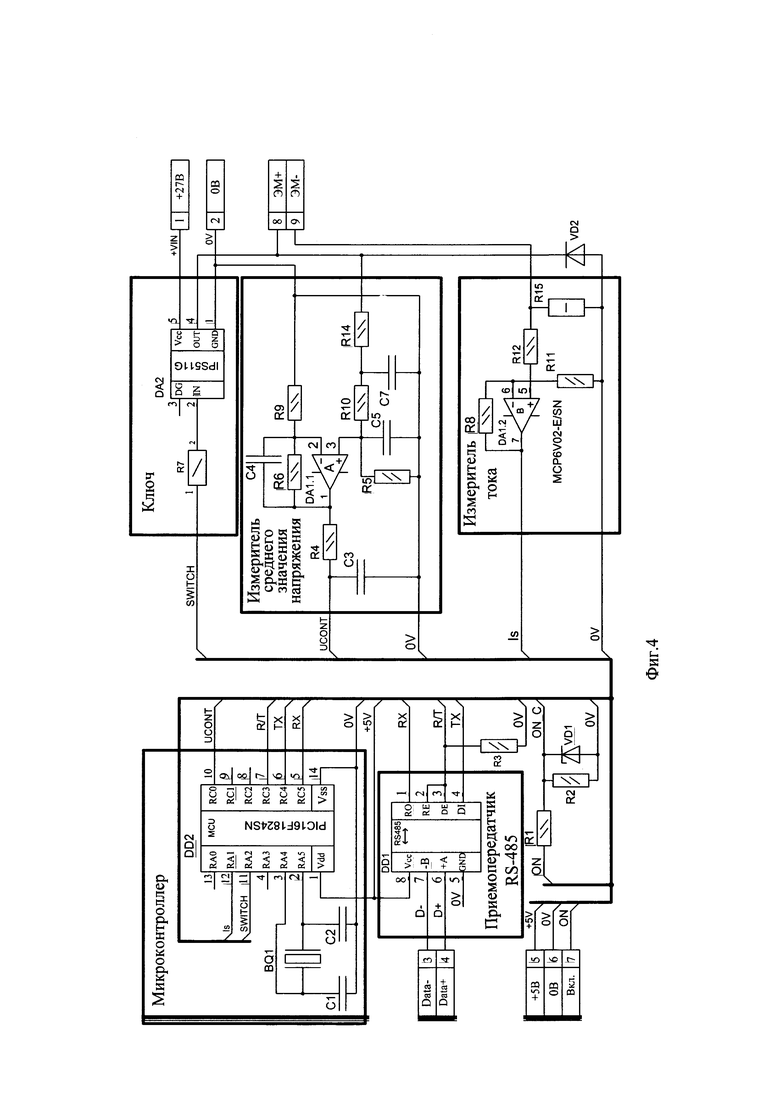
Фиг. 4. Электрическая принципиальная схема возможного исполнения устройства для мониторинга температуры обмотки электромагнита.
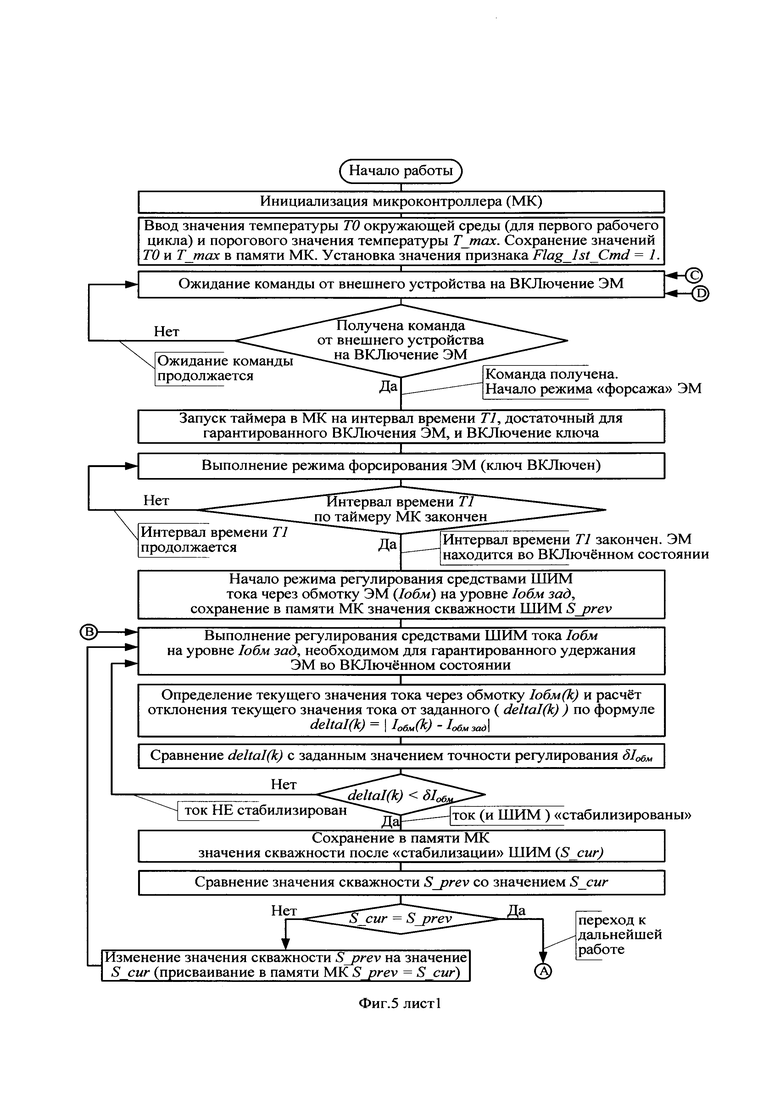
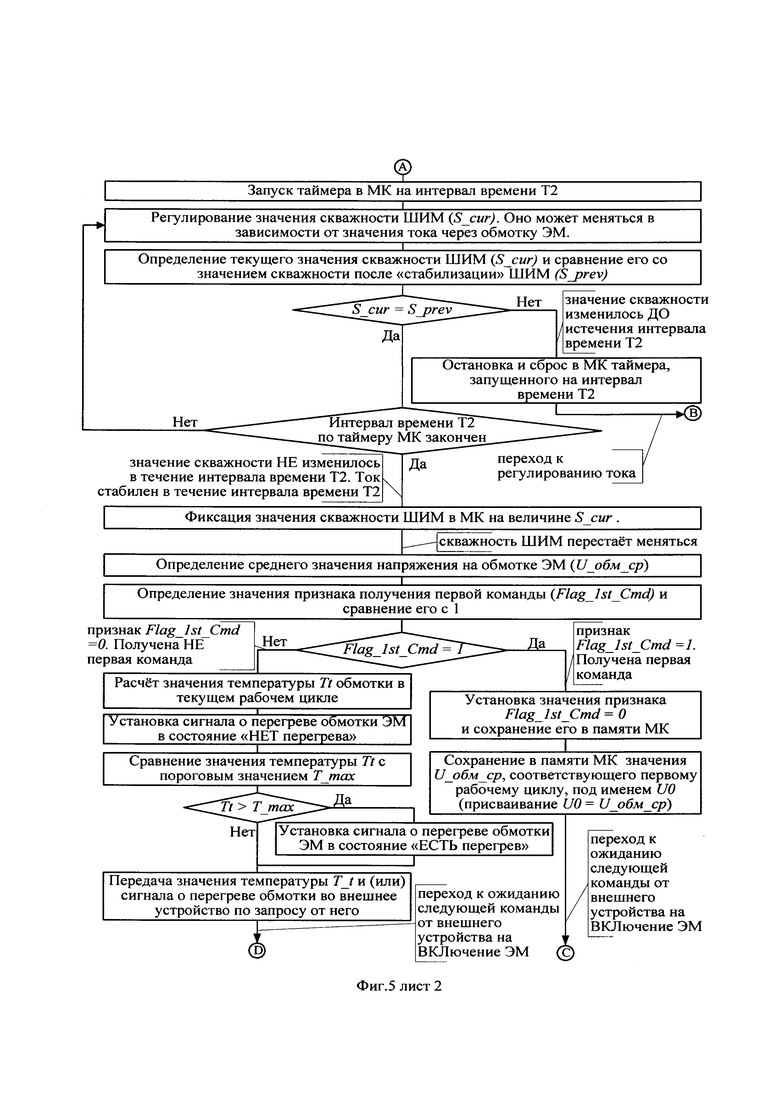
Фиг. 5. Блок-схема возможного алгоритма, используемого при работе предлагаемого устройства, реализующего предлагаемый способ.
Предлагаемый способ основан на определении относительного изменения электрического сопротивления обмотки при изменении ее температуры. Так, в соответствии с [6], для диапазона температур от 0°С до 200°С

где ΔТ=Т-Т0;
R0 - значение сопротивления обмотки при температуре Т0;
Rt - значение сопротивления обмотки при температуре Т;
α - температурный коэффициент сопротивления (например, для меди α=0,00428°С-1 [6]).
Решая уравнение (2) относительно Т получим

Учитывая, что при установившемся значении тока через обмотку ЭМ сопротивление обмотки Rобм=Uобм,ср/Iобм,ср (Uобм,ср - среднее значение напряжения, приложенного к обмотке, а Iобм,ср - среднее значение тока, протекающего через обмотку), уравнение (3) можно привести к виду (1).
Предлагаемый способ предполагает использование управляющих сигналов рабочего цикла ЭМ, содержащего участок срабатывания и участок удержания. На участке удержания обычно формируют управляющий сигнал импульсной модуляции и, таким образом, стабилизируют ток через обмотку электромагнита на уровне, необходимом для гарантированного удержания электромагнита во включенном состоянии. Именно потому, что на участке удержания среднее значение тока Iобм,ср, протекающего через обмотку ЭМ, стабилизировано, для определения температуры обмотки в текущем цикле управления может быть использовано соотношение (1). Отметим, что при этом не нужно знать собственно значение Iобм,ср, достаточно того, что оно одинаково и стабилизируется в каждом текущем рабочем цикле ЭМ.
Среднее значение напряжения на обмотке ЭМ Uобм,ср можно определять разными способами, в частности, как среднее арифметическое между максимальным и минимальным значениями этого напряжения, сглаженного фильтром нижних частот.
Для использования информации о температуре обмотки в системах верхнего уровня сигнал, соответствующий значению температуры обмотки на текущем рабочем цикле, передают внешним устройствам.
Чтобы не допустить перегрева обмотки и выхода ЭМ из строя, дополнительно сравнивают значение температуры обмотки в текущем рабочем цикле с допустимым предопределенным пороговым значением и, при превышении температурой обмотки допустимого предопределенного порогового значения, формируют сигнал, являющийся признаком перегрева обмотки электромагнита.
Для использования информации о перегреве обмотки в системах верхнего уровня сигнал, являющийся признаком перегрева обмотки ЭМ, передают внешним устройствам.
На фиг. 1 приведены полученные экспериментально на экране осциллографа переходные процессы изменения в течение рабочего цикла параметров ЭМ, влияющих на определение температуры. Верхняя осциллограмма отражает процесс изменения напряжения, прикладываемого к обмотке ЭМ. На нижней осциллограмме показан зарегистрированный процесс изменения тока в обмотке ЭМ, включающий два участка рабочего цикла ЭМ - участок срабатывания и участок удержания. T1 - время гарантированного срабатывания ЭМ, после истечения которого включается импульсная модуляция (это явно видно на верхней осциллограмме изменения напряжения, прикладываемого к обмотке ЭМ) и происходит переход в режим удержания. В режиме удержания после стабилизации среднего значения тока в обмотке ЭМ, например, на интервале Т2, можно производить измерение среднего значения напряжения на обмотке ЭМ. На средней (второй снизу) осциллограмме приведен процесс изменения напряжения на обмотке ЭМ, сглаженного фильтром нижних частот. Этот сигнал может быть использован для определения среднего значения напряжения на обмотке ЭМ Uобм,ср, например, с помощью вычисления среднего арифметического между максимальным и минимальным значениями этого напряжения на интервале Т2, с использованием ресурсов микроконтроллера.
При регистрации приведенных на фиг. 1 осциллограмм для стабилизации среднего значения тока в обмотке ЭМ в режиме удержания использована широтно-импульсная модуляция, подробно описанная в [5].
Для реализации предложенного способа разработано устройство для мониторинга температуры обмотки ЭМ, функциональная схема которого приведена на фиг. 2. Это устройство содержит (см. фиг. 2) последовательно соединенные источник питания, ключ, электромагнит и блок управления, выход которого соединен с управляющим входом ключа. Причем блок управления содержит измеритель тока обмотки электромагнита, вход которого соединен с выходом электромагнита, и микроконтроллер, соответствующий вход которого соединен с выходом измерителя тока, а выход - с управляющим входом ключа. Для решения задачи предполагаемого изобретения в блок управления дополнительно введены приемопередатчик RS-485, связанный двунаправленными линиями с микроконтроллером и внешними устройствами, и измеритель среднего значения напряжения на обмотке электромагнита, вход которого соединен с выходом ключа. Измеритель среднего значения напряжения на обмотке электромагнита выполнен (см. функциональную схему на фиг. 3) в виде последовательно соединенных первого фильтра нижних частот, усилителя и второго фильтра нижних частот. При этом микроконтроллер содержит (см. фиг. 2) модули центрального процессора, памяти, универсального асинхронного приемопередатчика, импульсного модулятора, аналогово-цифрового преобразователя, таймера и коммутатора. Причем первый вход коммутатора соединен с выходом измерителя тока, второй вход коммутатора соединен с выходом измерителя среднего значения напряжения, а его управляющий вход с первым управляющим выходом центрального процессора. Выход коммутатора соединен с входом аналогово-цифрового преобразователя, выход которого соединен с информационным входом центрального процессора. Второй управляющий выход центрального процессора соединен с входом импульсного модулятора, выход которого соединен с управляющим входом ключа и входом прерывания центрального процессора. Кроме того, центральный процессор соединен двунаправленными линиями связи с модулями универсального асинхронного приемопередатчика, памяти и таймера, а управляющий вход центрального процессора, являющийся управляющим входом микроконтроллера, соединен с дискретным выходом системы верхнего уровня.
Рассмотрим назначение основных узлов предлагаемого устройства (см. фиг. 2). Источник питания обеспечивает подачу напряжения, необходимого для работы ЭМ, а также подачу напряжения 5 В для питания элементов схемы. Ключ является управляемым силовым ключом, выполняющим коммутацию напряжения на ЭМ по сигналам управления. Измеритель тока выполняет нормирование тока Iобм, протекающего через обмотку ЭМ, для согласования с параметрами аналогового входа микроконтроллера. Измеритель среднего значения напряжения на обмотке ЭМ выполняет нормирование и усреднение напряжения на обмотке ЭМ для согласования с параметрами аналогового входа МК. Микроконтроллер управляет работой силового ключа и приемопередатчика RS-485, выполняет определение среднего значения напряжения на обмотке ЭМ Uобм,ср, осуществляет регулирование тока, протекающего в обмотке ЭМ, а также обеспечивает прием сигналов управления от внешнего устройства и передачу значения температуры обмотки ЭМ и признака перегрева обмотки внешним устройствам. Приемопередатчик RS-485 преобразует логические сигналы МК в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [7]. ЭМ является объектом контроля и управления.
Данное устройство может использоваться в распределенной системе управления как оконечное. Работа происходит по командам внешнего устройства, передаваемым по последовательному интерфейсу. Также указанный интерфейс используется для передачи значения температуры обмотки в текущем рабочем цикле и настройки параметров управления. Включение ЭМ может выполняться по командам, поступающим по интерфейсу RS-485, или по дискретному сигналу «Вкл. ЭМ». Перед первым включением ЭМ в МК устройства передаются значение температурного коэффициента сопротивления провода обмотки α, начальное значение температуры обмотки Т0, которые сохраняются в памяти МК. При первом включении измеряется среднее значение напряжения U0 при установившемся токе. МК сохраняет значения этих констант в своей памяти. При последующих включениях среднее значение напряжения Ut, измеренное в текущем цикле работы ЭМ, и значения констант, хранящихся в памяти МК, используются для определения значения температуры обмотки на текущем рабочем цикле Tt в соответствии с соотношением (1).
С целью исключения влияния изменения напряжения, подаваемого на вход ключа (напряжения питания Un), определение среднего значения напряжения Ut выполняется после стабилизации уровня тока в режиме удержания с заданной точностью. Переход в режим удержания выполняется по истечении промежутка времени T1, задаваемого внутренним таймером МК. Контур стабилизации тока в режиме удержания использует импульсный модулятор, построенный на средствах модуля ШИМ (модуль широтно-импульсной модуляции, в англоязычном варианте - PULSE-WIDTH MODULATION (PWM) MODULE), входящего в состав МК. Регулирование осуществляется по сигналу обратной связи, поступающему от измерителя тока через коммутатор на вход модуля АЦП (модуль аналого-цифрового преобразователя, в англоязычном варианте ADC - ANALOG-TO-DIGITAL CONVERTER MODULE). Расчетная часть алгоритма управления реализована программно с использованием модуля центрального процессора. При достижении средней величиной тока в обмотке ЭМ установившегося значения, значение скважности модуля ШИМ фиксируется (перестает меняться) и начинается отсчет промежутка времени Т2. При условии, что на данном интервале времени величина тока остается в заданных пределах, коммутатор переключает на вход АЦП сигнал с выхода измерителя среднего значения напряжения на обмотке ЭМ, после чего выполняется определение среднего значения напряжения на обмотке ЭМ Uобм,ср. По окончании промежутка времени Т2 и определения Uобм,ср, коммутатор переключает вход АЦП на измерение тока. Форма сигналов при реализации указанного способа приведена на фиг. 1. Измерение среднего значения напряжения выполняется по событиям прерываний, в моменты времени, соответствующие включению и отключению ключа, с последующим усреднением.
Принципиальная схема возможного исполнения предлагаемого устройства приведена на фиг. 4.
В качестве приемопередатчика RS-485 (DD1) применена микросхема SN65HVD1785 [8]. Эти микросхемы предназначены для использования в качестве приемопередатчика по стандарту RS-485 для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик соединен с модулем универсального асинхронного приемопередатчика УАПП (в англоязычном варианте UART - Universal Asynchronous Receiver Transmitter), представляющего собой периферийное устройство МК. Микроконтроллер (DD2) выполнен на микросхеме PIC16F1824SN [9] с тактированием от внешнего кварцевого резонатора BQ1. Управление ключом DA2 осуществляется модулем ШИМ (ССР3 - Capture/Compare/PWM) через вывод RA2(11) МК). В устройстве может быть использован ключ верхнего уровня IPS511G [10]. Кроме того, для определения среднего значения напряжения на обмотке ЭМ, в моменты достижения локальных максимума и минимума сигнала с выхода измерителя среднего значения напряжения на обмотке (момент закрытия и открытия ключа), обеспечивается запуск АЦП по событиям прерываний, вызываемым изменением состояния вывода RA2 (Interrupt-on-change) МК. Считывание среднего значения напряжения на обмотке ЭМ осуществляется с вывода RA1(12), а величины тока с вывода RC0(10) МК. Измеритель среднего значения напряжения на обмотке ЭМ выполнен с использованием микросхемы DA1.1 MCP6V02[11] и представляет собой неинвертирующий усилитель, на вход которого через первый фильтр нижних частот, выполненный на элементах R14 С7 и R10 С5, поступает сигнал с обмотки ЭМ. Кроме того, для снижения уровня пульсаций выходного напряжения, используются дополнительный фильтр нижних частот, построенный на элементах R6 С4, и второй фильтр нижних частот, выполненный в виде элементов R4 С3. Усилитель обеспечивает уровень напряжения на входе АЦП, необходимый для его правильного функционирования. Частота среза фильтров нижних частот выбирается примерно в четыре раза ниже частоты ШИМ. Измеритель тока выполнен на втором канале микросхемы MCP6V02 DA1.2 и представляет собой неинвертирующий усилитель напряжения, снимаемого с токоизмерительного резистора R15.
На фиг. 5 представлена блок-схема алгоритма, используемого при работе возможного исполнения предлагаемого устройства, электрическая принципиальная схема которого приведена на фиг. 4.
Таким образом, из приведенных материалов описания предполагаемого изобретения следует, что использование предлагаемого технического решения обеспечивает определение температуры обмотки ЭМ в каждом его рабочем цикле по результатам измерения напряжения на обмотке. При этом на результат определения температуры, в отличие от известных технических решений, не влияют изменение напряжения питания ЭМ и индуктивности обмотки, что обеспечивает повышение помехозащищенности и точности предлагаемого решения. Кроме того, по сравнению с прототипом, достигается снижение требований к производительности микроконтроллера и объему необходимой памяти.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US 10280861 В2 METHOD AND APPARATUS FOR MONITORING THE TEMPERATURE OF THE COIL WIRE OF A SOLENOID VALVE May 7, 2019.
2. ЕР 2116709 A1 Indication of a solenoid temperature change. 11.11.2009 Bulletin 2009/46.
3. DE 102014206353 A1 Method and device for monitoring the temperature of the coil wire of a magnetic valve 2014-04-03
4. WO 2015/150049 A1 METHOD AND APPARATUS FOR MONITORING THE TEMPERATURE OF THE COIL WIRE OF A SOLENOID VALVE. 3 April 2014.
5. US 7738234 B2 SOLENOID-OPERATED VALVE AND SOLENOD-OPERATED VALVE DRIVING CIRCUIT. Jun. 15, 2010.
6. ГОСТ6651-2009 Термопреобразователи сопротивления из платины, меди и никеля.
7. ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998 Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
8. http://www.ti.com/lit/ds/symlink/sn65hvd1785.pdf
9. http://www.microchip.com/support DS40001419F.pdf
10. http//www.irf.com/part/INTELLIGENT-POWER-SWITCH-1-CHANNEL-HIGH-SIDE-DRIWER-IN-TO-220FL-P
11. https//www.microchip.com/wwwproducts/en/MCP6V02
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802271C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802294C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
Изобретение относится к электротехнике и может быть использовано для управления приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов. Технический результат состоит в повышении помехозащищенности и точности за счет исключения влияния изменения напряжения питания ЭМ и индуктивности обмотки на определение температуры обмотки, также в снижении требований к производительности микроконтроллера и объему необходимой памяти. Для предотвращения превышения температуры обмотки ЭМ допустимой максимальной величины необходимо производить ее мониторинг. Предложено использование управляющих сигналов рабочего цикла ЭМ, содержащего участок срабатывания и участок удержания. На участке удержания формируют управляющий сигнал импульсной модуляции и, таким образом, стабилизируют ток через обмотку электромагнита на уровне, необходимом для гарантированного удержания электромагнита во включенном состоянии. На участке удержания при установившемся среднем значении тока в обмотке определяют среднее значение напряжения на обмотке, сохраняют это значение, полученное при первом включении электромагнита, когда температура обмотки равна известному значению температуры окружающей среды, которое также сохраняют. В каждом последующем рабочем цикле определяют текущее среднее значение напряжения на обмотке на участке удержания и определяют значение температуры обмотки на текущем рабочем цикле по формуле

где Tt - значение температуры обмотки в текущем рабочем цикле; Т0 - значение температуры окружающей среды при первом включении ЭМ; U0 - среднее значение напряжения на обмотке при первом включении ЭМ; Ut - среднее значение напряжения на обмотке в текущем рабочем цикле; α - температурный коэффициент сопротивления провода обмотки. 2 н. и 4 з.п. ф-лы, 5 ил.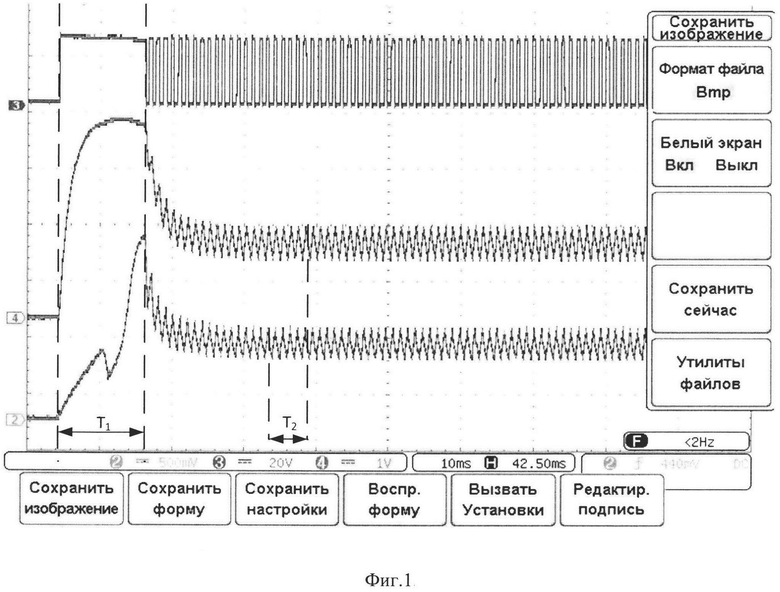
1. Способ мониторинга температуры обмотки электромагнита, включающий использование управляющих сигналов рабочего цикла электромагнита, содержащего участок срабатывания и участок удержания, причем на участке удержания формируют управляющий сигнал импульсной модуляции и, таким образом, стабилизируют ток через обмотку электромагнитного клапана на уровне, необходимом для гарантированного удержания электромагнита во включенном состоянии, отличающийся тем, что на участке удержания при установившемся среднем значении тока в обмотке определяют среднее значение напряжения на обмотке, сохраняют это значение, полученное при первом включении электромагнита, когда температура обмотки равна известному значению температуры окружающей среды, которое также сохраняют, а в каждом последующем рабочем цикле определяют текущее среднее значение напряжения на обмотке на участке удержания и определяют значение температуры обмотки в текущем рабочем цикле по формуле
где Tt - значение температуры обмотки в текущем рабочем цикле;
Т0 - значение температуры окружающей среды в первом рабочем цикле;
U0 - среднее значение напряжения на обмотке в первом рабочем цикле;
Ut - среднее значение напряжения на обмотке в текущем рабочем цикле;
α - температурный коэффициент сопротивления провода обмотки.
2. Способ мониторинга температуры обмотки электромагнита по п. 1, отличающийся тем, что в нем среднее значение напряжения на обмотке электромагнита определяют как среднее арифметическое между максимальным и минимальным значениями сглаженного фильтром нижних частот напряжения на обмотке.
3. Способ мониторинга температуры обмотки электромагнита по п. 1, отличающийся тем, что сигнал, соответствующий значению температуры обмотки в текущем рабочем цикле, передают внешним устройствам.
4. Способ мониторинга температуры обмотки электромагнита по п. 1, отличающийся тем, что в нем дополнительно сравнивают значение температуры обмотки в текущем рабочем цикле с допустимым предопределенным пороговым значением и при превышении температурой обмотки допустимого предопределенного порогового значения формируют сигнал, являющийся признаком перегрева обмотки электромагнита.
5. Способ мониторинга температуры обмотки электромагнита по п. 3, отличающийся тем, что сигнал, являющийся признаком перегрева обмотки электромагнита, передают внешним устройствам.
6. Устройство для мониторинга температуры обмотки электромагнита, содержащее последовательно соединенные источник питания, ключ, электромагнит и блок управления, выход которого соединен с управляющим входом ключа, причем блок управления содержит измеритель тока обмотки электромагнита, вход которого соединен с выходом электромагнита, и микроконтроллер, вход которого соединен с выходом измерителя тока, а выход - с управляющим входом ключа, отличающееся тем, что в блок управления дополнительно введены приемопередатчик RS-485, связанный двунаправленными линиями с микроконтроллером и внешними устройствами, и выполненный в виде последовательно соединенных первого фильтра нижних частот, усилителя и второго фильтра нижних частот измеритель среднего значения напряжения на обмотке электромагнита, вход которого соединен с выходом ключа, а микроконтроллер содержит модули центрального процессора, памяти, универсального асинхронного приемопередатчика, импульсного модулятора, аналогово-цифрового преобразователя, таймера и коммутатора, причем первый вход коммутатора соединен с выходом измерителя тока, второй вход коммутатора соединен с выходом измерителя среднего значения напряжения, а его управляющий вход - с первым управляющим выходом центрального процессора, выход коммутатора соединен с входом аналогово-цифрового преобразователя, выход которого соединен с информационным входом центрального процессора, второй управляющий выход которого соединен с входом импульсного модулятора, выход которого соединен с управляющим входом ключа и входом прерывания центрального процессора, кроме того, центральный процессор соединен двунаправленными линиями связи с модулями универсального асинхронного приемопередатчика, памяти и таймера, а управляющий вход центрального процессора, являющийся управляющим входом микроконтроллера, соединен с дискретным выходом системы верхнего уровня.
| WO 2015150049 A1, 08.10.2015 | |||
| СПОСОБ ПОСАДКИ ЛЕСНЫХ КУЛЬТУР НА СКЛОНАХ | 1993 |
|
RU2116709C1 |
| US 10280861 B2, 07.05.2019 | |||
| CN 108375422 A, 07.08.2018 | |||
| Устройство для измерения температуры трансформаторных обмоток под нагрузкой | 1936 |
|
SU52822A1 |
| Устройство для измерения температуры обмоток электрической машины без отключения от сети | 1982 |
|
SU993049A1 |
| Устройство для измерения температуры обмоток электрических машин постоянного тока | 1984 |
|
SU1174786A1 |

