Изобретение относится к балансирным (рычажным) подвескам, качание рычагов которых происходит в продольной плоскости, параллельной плоскости вращения ходовых колес, предназначенным для транспортных средств высокой проходимости с мотор-колесами, то есть со встроенными в колеса индивидуальными электромеханическими приводами.
Известна независимая балансирная подвеска колеса транспортного средства со встроенными в колеса приводами, содержащая упругий элемент подвески, балансир, верхняя ось которого связана с упругим элементом и установлена поворотно в корпусе транспортного средства, а нижняя установлена поворотно на корпусе привода колеса, который, кроме того, шарнирно связан с корпусом транспортного средства с помощью реактивной тяги, установленной параллельно балансиру и имеющей одинаковую с ним длину [1]. Такую конструкцию называют также параллелограммной подвеской, имея в виду, что ее четыре шарнирно соединенных звена представляют собой параллелограмм, одно из звеньев которого (корпус транспортного средства) закреплено неподвижно. Подвеска [1] позволяет разгрузить упругий элемент от действия реактивного крутящего момента встроенного тягового привода, который в этой конструкции замыкается на корпус парой сил сжатия - растяжения, действующих через нижний рычаг и реактивную тягу. Кроме того, подвеска обеспечивает плоско - параллельное движение оси вращения колеса и, соответственно, корпуса тягового привода, при качании рычагов подвески. Это обстоятельство особенно важно для мотор - колес, оснащенных, для повышения маневренности, рулевыми механизмами. Ось шкворня такого механизма, относительно которой происходит поворот плоскости вращения колеса, не изменяет своей ориентации в любом положении рычагов подвески.
Недостатком упругой подвески, особенно для многоколесных полно приводных транспортных средств, является невозможность обеспечить надежный контакт всех колес с опорной поверхностью в пределах ходов балансиров между упорами, при движении по сложному рельефу. При движении по горизонтальной опорной поверхности, крен (угол наклона относительно продольной оси) несущей рамы (корпуса) при наезде колеса одного борта на одиночное препятствие, практически полностью повторяет угол, образованный линией, соединяющей точки контакта колес противоположных бортов с опорной поверхностью и проекцией этой линии на горизонтальную плоскость. Движение по любому рельефу происходит со значительной неравномерностью загрузки отдельных мотор-колес. Упругие элементы рычажных подвесок обычно изготавливаются из специальных стальных или титановых сплавов виде одно или много стержневых торсионов, которые должны сохранять работоспособность при закрутке на значительные углы, определяющие хода подвески, при циклическом характере нагрузок. Это достаточно сложная технологическая задача.
Современные тихоходные автономно - автоматические планетоходы (скорость движения которых, из-за особенностей автоматического вождения, составляет 0,1 м/с-0,2 м/с), не требуют упругих элементов подвески для амортизации динамических процессов. Это относится, в частности, ко всем четырем реальным американским марсоходам и к китайскому луноходу Юйту, шести колесные шасси которых базируются на использовании балансирных подвесок типа Rocker - Bogie, соосные бортовые балансиры которых связаны, с помощью полуосей, рычажным или дифференциальным механизмом синхронизации, который, по существу, также представляет собой балансирное устройство. Схемы таких подвесок, в состав которых не входят упругие элементы, применительно к шести колесным транспортным средствам приведены в [2], а конструкция подвесок в [3].
Эти подвески нашли применение в настоящее время, поскольку при движении планетоходов с малой скоростью они характеризуется более высокой степенью адаптации колесного движителя к сложному рельефу и обеспечением более надежного контакта всех колес с грунтом по сравнению с упругими подвесками. Однако, как показывает опыт эксплуатации американских марсоходов и расчетно-теоретические исследования работы их подвески, в отдельных случаях, при преодолении некоторых препятствий возможен отрыв колес тележек от опорной поверхности под действием реактивных моментов тяговых приводов, поскольку в этих подвесках приводы жестко связаны с балансирами.
Необходимо отметить некоторое различие понятий «балансирная» подвеска, которое соответствует описанию изобретения [1], и современным представлениям о балансирных подвесках типа Rocker - Bogie [2, 3]. В первом случае балансиром назван нижний рычаг, качающийся относительно оси, организованной на одном из концов этого рычага. Реакции грунта на колесо, приведенные к свободному концу этого рычага, в пределах угла качания, ограниченного верхним и нижним упорами, уравновешиваются упругим моментом, который, в свою очередь, замыкается на корпус транспортного средства и через него, а затем через другие ходовые колеса - на грунт. Реактивный крутящий момент тягового привода замыкается на корпус (раму) транспортного средства парой нижний рычаг - верхняя тяга.
В современных балансирных подвесках под балансиром подразумевают двуплечий рычаг с осью качания, находящейся между двумя свободными концами балансира. Для транспортных средств высокой проходимости важным обстоятельством является равноценность прямого хода и реверса, что, для четырехколесного средства, приводит к равноплечей схеме, то есть к размещению оси качания в геометрическом центре продольных (бортовых) или поперечных [4] (торцевых) балансиров. Звенья подвески с осями качания на концах этих звеньев ниже называются рычагами, если они имеют пространственный характер нагружения и тягами, если они нагружены исключительно осевыми усилиями сжатия - растяжения.
Именно с помощью двух бортовых и одного торцевого модулей (тележек), каждый из которых выполнен на основе двух параллелограммных механизмов с общим балансиром, получается трех точечная подвеска транспортного средства [5]. По сравнению с подвесками Rocker-Bogie, трех точечная подвеска гарантирует постоянный контакт колес с грунтом во всех фазах преодоления препятствий за счет применения параллелограммной схемы подвески боковых тележек, поскольку реактивные моменты тяговых приводов замкнуты в такой схеме на корпус или раму шасси. Кроме того, для колес тележек трех точечной подвески обеспечивается равенство нормальных реакций грунта, действующих на колеса, что способствует более равномерной загрузке мотор-колес и реализации более высоких тягово-сцепных свойств при преодолении препятствий.
Известны балансирные подвески четырехколесного самоходного шасси, содержащие два бортовых соосных балансира, связанных между собой с помощью двух полуосей и, расположенного симметрично относительно продольной оси транспортного средства, механизма синхронизации, выполненного в виде межбортового дифференциала [6]. Достоинством подвески является уменьшение угла наклона несущей рамы при преодолении одиночных препятствий под колесами противоположных бортов. В качестве недостатков следует отметить качательный характер движения колеса, при котором ось шкворня изменяет ориентацию относительно опорной поверхности, что приводит к возникновению дополнительных моментов сопротивления повороту плоскости вращения колеса и увеличению потребной мощности рулевого привода. Кроме того, недостатком является и замыкание реактивных моментов тяговых приводов на балансир, что в определенных случаях так же, как и в подвеске Rocker-Bogie, может приводить к отрыву колеса от грунта.
Эти недостатки можно исключить, если взамен бортовых балансиров использовать рассмотренные выше параллелограммные подвески с общим балансиром, как, например, у тележек трехточечной подвески. Такое решение обеспечивает плоскопараллельный характер движения колес и сохранение ориентации оси шкворня при качании подвески. Однако в обеих конструкциях бортовые балансиры оказываются чрезмерно громоздкими и массивными, так как их длина соизмерима с длиной колесной базы, и они замыкают на корпус все внешние силы и крутящие моменты, действующие на ходовые колеса при взаимодействии с грунтом.
Цель изобретения - уменьшение плеч рычагов механизмов подвесок, улучшение их габаритно - массовых характеристик с одновременным увеличением в два раза хода подвесок при сохранении эффекта уменьшения угла наклона несущей рамы в случаях преодоления одиночных препятствий и сохранения плоско - параллельной траектории перемещения колес при качании рычагов подвесок четырехколесных транспортных средств. Прототипом изобретения является подвеска [1].
Указанные цели достигаются путем исключения упругого элемента и установки в четырехколесном транспортном средстве, снабженным параллелограммными подвесками каждого колеса, двух межбортовых дифференциалов, в каждом из которых два, соосных зубчатых конических колеса соединены с балансирами подвесок противоположных бортов с помощью двух поперечных полуосей, а находящиеся в зацеплении с этими колесами конические зубчатые колеса межбортовых дифференциалов соединены друг с другом с помощью двух продольных полуосей и межосевого дифференциала, при этом оси вращения всех четырех поперечных и двух продольных полуосей, а также поперечные оси межбортовых дифференциалов лежат в общей плоскости, проходящей через оси качания четырех балансиров.
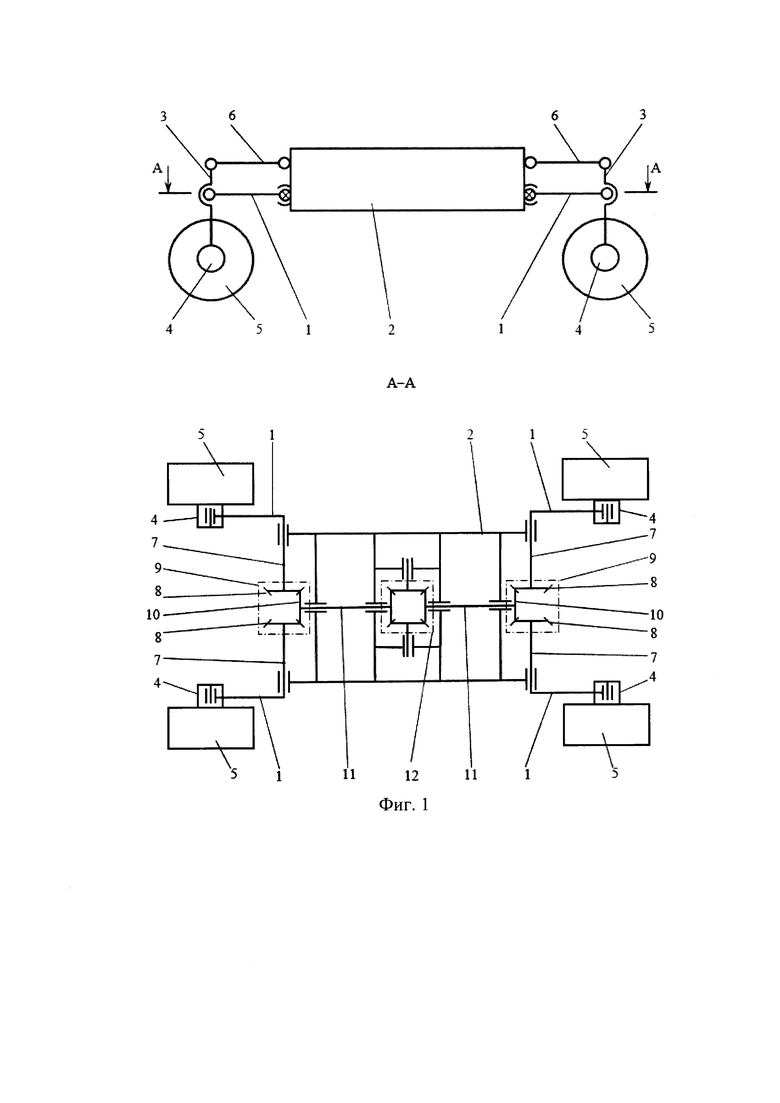
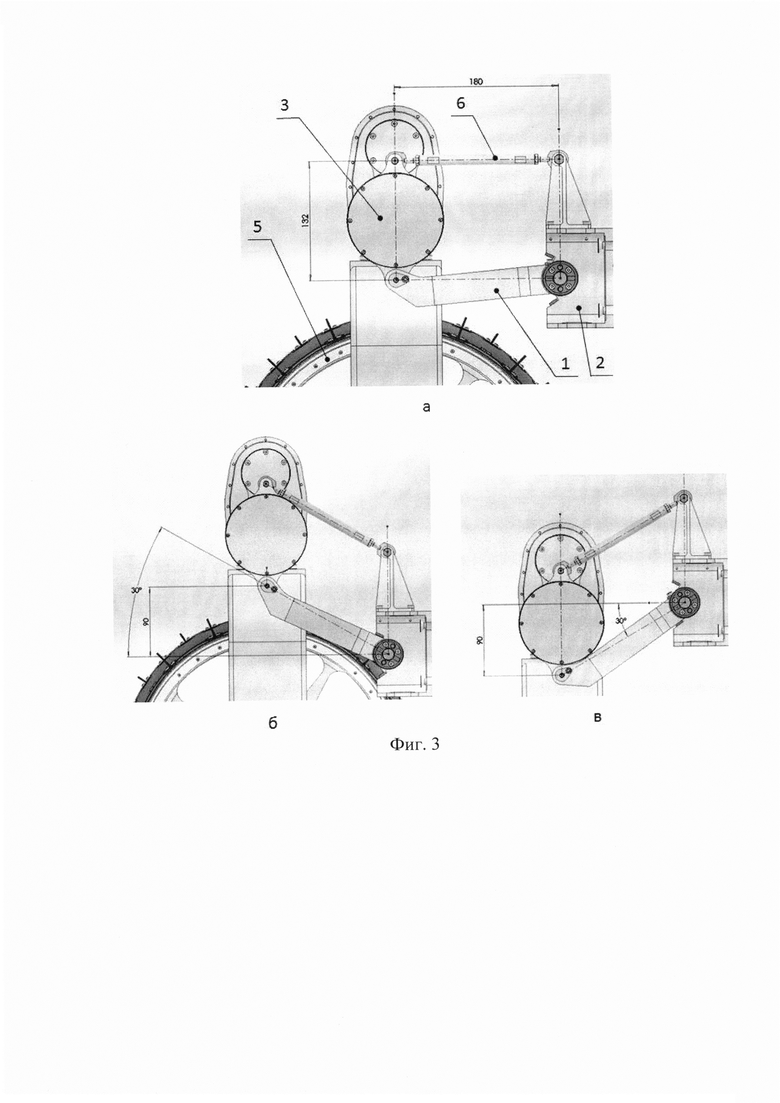
На фиг. 1 приведена кинематическая схема балансирной подвески транспортного средства, на фиг. 2 - конструкция сопряжения компонентов подвески с несущей рамой транспортного средства, На фиг. 1 приведена кинематическая схема балансирной подвески транспортного средства, на фиг. 2 - конструкция сопряжения компонентов подвески с несущей рамой транспортного средства, На фиг. 1 приведена кинематическая схема балансирной подвески транспортного средства, на фиг. 2 - конструкция сопряжения компонентов подвески с несущей рамой транспортного средства, на фиг. 3.a - конструкция сопряжения параллелограммных механизмов подвески с колесом. Конструкция разработана применительно к подвеске с ходом ±90 мм от горизонтального положения и плечом рычага и тяги, равным 180 мм. На фиг. 3.б показано крайнее верхнее положение подвески, на фиг. 3.в - крайнее нижнее положение.
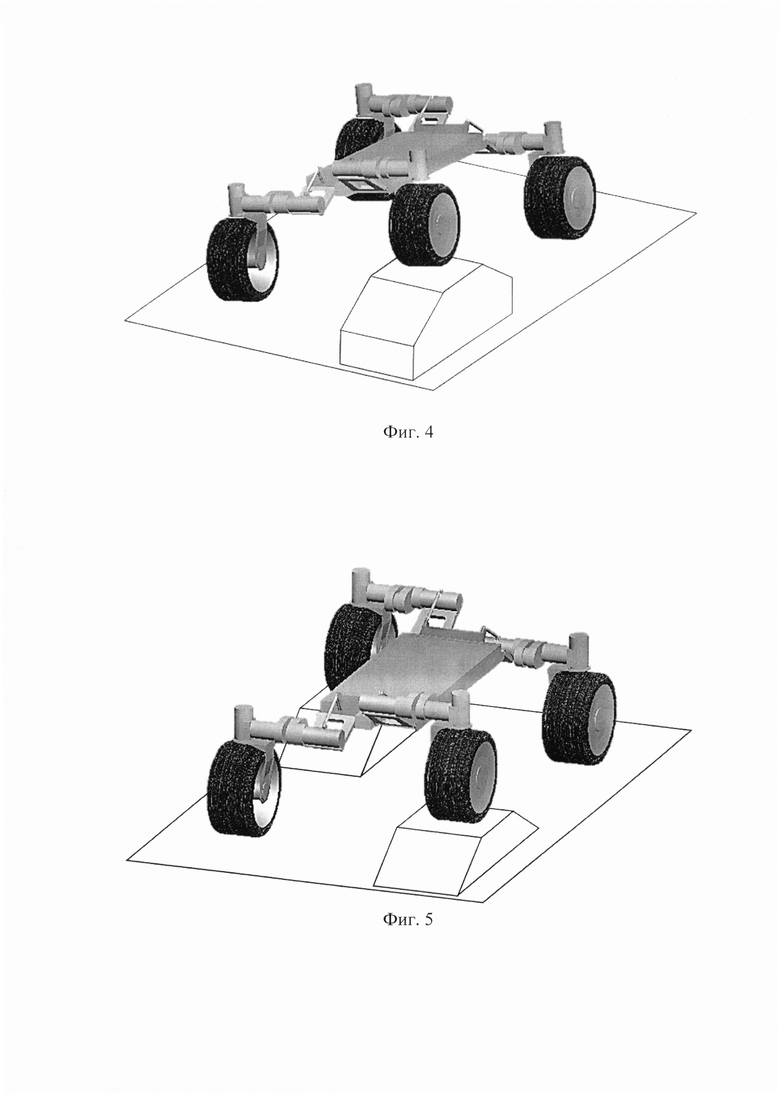
На фиг. 4 приведена конфигурация самоходного шасси транспортного средства при преодолении одиночного препятствия, высотой 360 мм под передним колесом левого борта, на фиг. 5 - конфигурация самоходного шасси транспортного средства при преодолении одиночных препятствий, высотой 180 мм под передним колесом левого и задним колесом правого борта.
Подвеска (фиг. 1) состоит из четырех нижних рычагов 1, каждый из которых имеет шарнирную ось качания на раме 2 транспортного средства. Противоположный конец нижнего рычага 1 шарнирно соединен со стойкой 3, конструктивно объединенной с корпусом тягового привода 4 мотор-колеса 5. Стойка 3 также шарнирно соединена с рамой 2 с помощью верхней тяги 6, установленной параллельно нижнему рычагу 1 и имеющей равную с ним длину.
Шарнирно соединенные с рамой 2 нижние рычаги 1 связаны полуосями 7 с коническими зубчатыми колесами 8 межбортовых дифференциалов 9, а находящиеся в зацеплении с зубчатыми колесами 8 конические зубчатые колеса 10 межбортовых дифференциалов 9 соединены друг с другом с помощью двух продольных полуосей 11 и межосевого дифференциала 12, при этом оси вращения всех четырех поперечных полуосей 7 и двух продольных полуосей 11 лежат в общей плоскости, проходящей через оси качания четырех нижних рычагов 1 подвесок, а передаточное отношение зубчатых зацеплений дифференциалов 9 и 12 равно единице.
Сборка подвески выполняется таким образом, чтобы в исходном, номинальном положении подвески все нижние рычаги 1 были параллельны, т.е. шарнирные оси всех нижних рычагов 1 должны лежать в одной плоскости.
Подвеска работает следующим образом. Реактивные моменты от тягового привода 4 мотор-колеса 5 через пару нижний рычаг 1 - верхние тяги 6 замыкаются на раму 2, что исключает воздействие реактивных моментов на работу подвески.
При наезде на препятствие одним из колес стойка 3 с мотор-колесом 5 поднимается, совершая плоскопараллельное перемещение, соответствующий нижний рычаг 1 поворачивается на некоторый угол, при этом нижний рычаг 1 мотор-колеса 5 другого борта за счет передачи межбортового дифференциала 9 поворачивается на такой же угол в противоположном направлении, а нижние рычаги 1 другой колесной пары за счет передачи межосевого дифференциала 12 и соответствующего этой колесной паре межбортового дифференциала 9 поворачиваются в противоположных направлениях так, что нижние рычаги 1 мотор-колес 5, относящихся к одному борту, поворачиваются на одинаковый угол в одном направлении. При этом рама 2 наклоняется на угол в два раза меньший по сравнению с реальным углом, обусловленным различием вертикальных координат осей колес противоположных бортов при движении каждого колеса по различным неровностям.
Подвеска позволяет преодолевать одиночные препятствия высотой, равной удвоенному ходу нижнего рычага при переезде препятствия одним колесом. Максимальный размер препятствий под двумя колесами противоположных бортов одновременно соответствует величине хода нижнего рычага, при этом рама 2 транспортного средства в некоторых ситуациях может даже сохранить горизонтальное положение.
При движении по неровностям в пределах всего хода подвески обеспечивается также постоянный контакт всех колес с грунтом и равенство нормальных реакций на колесах.
Разработка схемы и конструкции новой подвески и самоходного шасси на его основе выполнены в рамках проекта Министерства образования и науки №14.576.21.0050, идентификационный номер RFMEFI57614X0050 [7].
Литература
1. А.С. СССР 272076, МПК B60G 11/20. Независимая балансирная подвеска колеса транспортного средства со встроенными в колеса двигателями. Бечвай Н.Е., Громов В.В., Егоров А.И. и др. Опубл. 26.05.1970, БИ №18.
2. Маленков М.И., Волов В.А., Гусева Н.К., Лазарев Е.А. Повышение подвижности марсоходов путем совершенствования систем передвижения и алгоритмов их управления. Вестник машиностроения. №8, 2015. - С. 37-44.
3. Brian D. Harrington and Chris Voorhees // The Ghallenges of Designing the Rocker-Bogie Suspension for the Mars Exploration Rover / Proc. of 37 Aerospace Mechanisms Symposium, Jonson Space Center, May 19-21, 2004.
4. Патент на изобретение РФ №2198107, МПК B62D 49/08. Двухосное колесное транспортное средство. Владыкин С.А., Кучеренко В.И., Горбунов В.Л., Маленков М.И. Опубл. 10.02.2003, БИ. №4.
5. Горбунов В.Л., Лазарев Е.А., Маленков М.И. Патент РФ на полезную модель №168035, МПК B62D 61/10. Опубл. 17.01.2017. БИ №2.
6. Kucherenko V., Bogatchev A., Winnendael М. van. Chassis Concepts for ExoMars Rover // In Proc. 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA), ESTEC, Noordwijk, the Netherlands. 2004.
7. Отчет о прикладных научных исследованиях «Создание научно-технических решений в области разработки робототехнических средств космического назначения для обеспечения инопланетных миссий» по теме «Обобщение и оценка результатов исследований», этап 5, АО НТЦ «РОКАД». Санкт-Петербург. № гос. регистрации 114120870012. - 2016. - 357 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ АВТОМОБИЛЯ ВЫСОКОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2194628C1 |
| ЗАДНЯЯ ТЕЛЕЖКА НАЗЕМНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2014 |
|
RU2568162C1 |
| УПРАВЛЯЕМАЯ ТЕЛЕЖКА НАЗЕМНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2014 |
|
RU2552375C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| АВТОГРЕЙДЕР | 2023 |
|
RU2824766C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ОСИ ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2819091C1 |
| ДВУХОСНАЯ ЭЛАСТИЧНАЯ ПОДВЕСКА КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2047501C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Трехосная эластичная подвеска колес транспортного средства | 1989 |
|
SU1675128A1 |

Изобретение относится к балансирным подвескам. Балансирная подвеска четырехколесного транспортного средства со встроенными в колеса приводами содержит шарнирно-рычажные параллелограммные механизмы каждого колеса, включающие нижний рычаг и верхнюю тягу одинаковой длины, шарнирно связанные своими концами с корпусами тягового привода и несущей рамой, и два межбортовых и один межосевой дифференциалы. В каждом из межбортовых дифференциалов два соосных зубчатых конических колеса соединены с нижними рычагами подвесок противоположных бортов с помощью двух поперечных полуосей, а находящиеся в зацеплении с этими колесами конические зубчатые колеса этих дифференциалов соединены друг с другом с помощью двух продольных полуосей и межосевого дифференциала. Оси вращения всех четырех поперечных и двух продольных полуосей, а также поперечные оси межбортовых дифференциалов лежат в общей плоскости, проходящей через оси качания четырех нижних рычагов подвесок относительно рамы. Достигается улучшение габаритно-массовых характеристик подвесок, увеличение их хода с одновременным уменьшением углов наклона рамы при движении по неровностям. 1 з.п. ф-лы, 5 ил.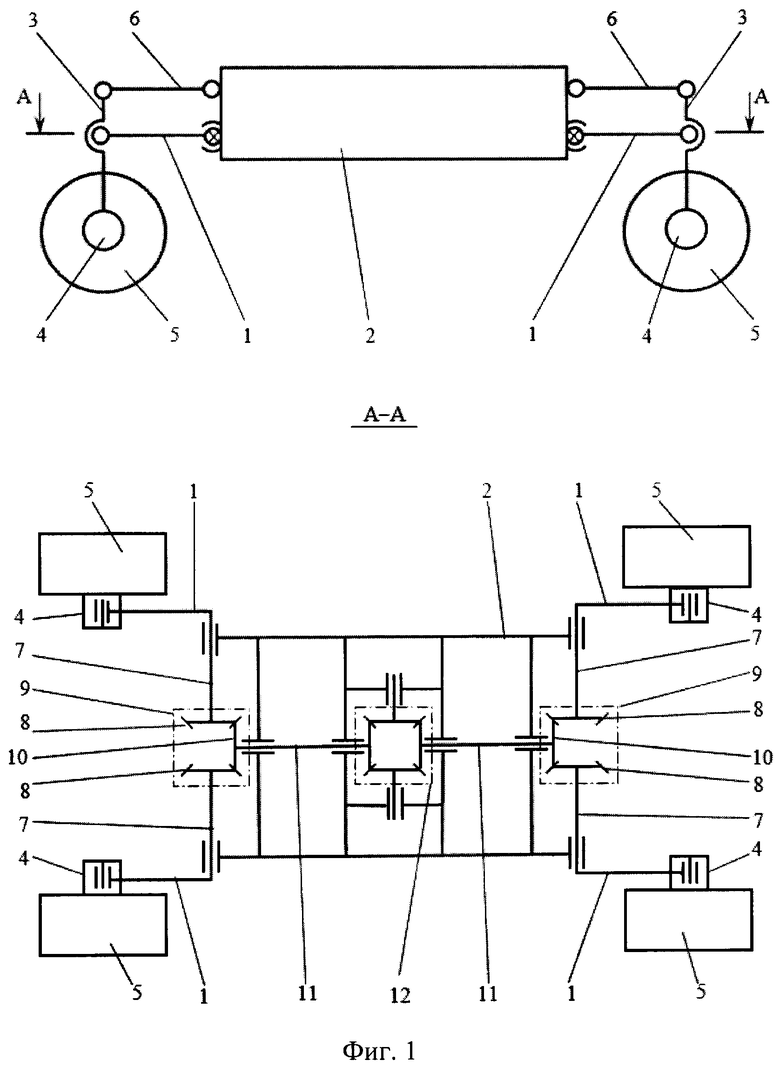
1. Балансирная подвеска четырехколесного транспортного средства со встроенными в колеса приводами, содержащая шарнирно-рычажные параллелограммные механизмы каждого колеса, включающие нижний рычаг и верхнюю тягу одинаковой длины, шарнирно связанные своими концами с корпусами тягового привода и несущей рамой, отличающаяся тем, что с целью улучшения габаритно-массовых характеристик подвесок, увеличения их хода с одновременным уменьшением углов наклона рамы при движении по неровностям и обеспечением плоскопараллельной траектории перемещения колес, в состав подвески включены два межбортовых и один межосевой дифференциалы, при этом в каждом из межбортовых дифференциалов два соосных зубчатых конических колеса соединены с нижними рычагами подвесок противоположных бортов с помощью двух поперечных полуосей, а находящиеся в зацеплении с этими колесами конические зубчатые колеса этих дифференциалов соединены друг с другом с помощью двух продольных полуосей и межосевого дифференциала, при этом оси вращения всех четырех поперечных и двух продольных полуосей, а также поперечные оси межбортовых дифференциалов лежат в общей плоскости, проходящей через оси качания четырех нижних рычагов подвесок относительно рамы.
2. Балансирная подвеска четырехколесного транспортного средства со встроенными в колеса приводами по п. 1, отличающаяся тем, что с целью унификации всех четырех тяговых приводов и их подвесок сборка подвески осуществляется в положении, когда оси поворотного соединения нижних рычагов всех подвесок с корпусом тяговых приводов всех мотор-колес находятся в общей плоскости, проходящей через оси качания четырех нижних рычагов подвесок относительно рамы.
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2176607C1 |
| УПРАВЛЯЕМАЯ ТЕЛЕЖКА НАЗЕМНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2014 |
|
RU2552375C1 |
| НЕЗАВИСИМАЯ БАЛАНСИРНАЯ ПОДВЕСКА КОЛЕСА | 0 |
|
SU272076A1 |
| DE 19908958 A1, 07.09.2000. | |||

