Изобретение относится к специальным самоходным транспортным средствам высокой проходимости, в частности к телеуправляемым транспортным средствам с колесно-шагающим движителем, объектов, например, при проведении антитеррористических мероприятий.
Известно колесное транспортное средство высокой проходимости, содержащее раму, пару колес с бортовыми редукторами, рычаги для балансирной подвески каждого колеса, дифференциальный механизм и двигатель, установленные на раме, ведомые звенья дифференциального механизма соединены с бортовыми редукторами колес, а ведущее звено соединено с двигателем перемещения колес в режиме качения /авт. свид. СССР N 149042, 1967, B 62 D 57/028/.
Данное транспортное средство высокой проходимости не может осуществлять движение в режиме шагающего хода, а лишь обеспечивает автоматическое соблюдение симметрии нагрузки на колеса при отклонениях бортовых редукторов от среднего положения.
Известно также транспортное средство высокой проходимости, имеющее колесно-шагающий движитель, содержащее раму, первую пару колес, вторую пару колес, оси с рычагами для балансирной подвески каждого колеса, установленные на раме, двигатели для перемещения колес в ведущем режиме качения, привод для перемещения колес в режиме шагающего движения /авт. свид. СССР N 640897, 1979, B 62 D 57/028/.
Известное транспортное средство высокой проходимости имеет независимую балансирную подвеску для каждого колеса, а следовательно, ограниченный уровень проходимости при преодолении рвов и трещин большой ширины на поверхности грунта.
Задачей, на решение которой направлено заявляемое изобретение, является повышение уровня профильной проходимости за счет обеспечения различного вида согласованного перемещения колес разных пар или колес одной пары, что обеспечивает повышение маневренности, и выбор необходимого характера перемещения колес, т.е. походки транспортного средства, подбираемой для конкретного профиля местности.
Другая задача, решаемая посредством изобретения, состоит в уменьшении габаритных размеров в транспортировочном положении путем обеспечения возможности сложения колес в пределах минимальных габаритных размеров транспортного средства.
Для решения указанных задач предложено транспортное средство высокой проходимости, включающее раму, первую пару колес, вторую пару колес, продольные рычаги балансирной подвески каждой пары колес с валами, которые установлены на раме, двигатели для перемещения каждого из упомянутых колес в ведущем режиме качения и привод для перемещения колес в режиме шагающего движения, по крайней мере, для одной из упомянутых пар колес.
Транспортное средство снабжено дифференциальным зубчатым механизмом, который имеет ведущее звено и два ведомых звена. Веющее звено выполнено в виде корпуса и кинематически связано с приводом перемещения одной пары колес в режиме шагающего движения, а ведомые звенья выполнены в виде зубчатых, например конических, колес с общей геометрической осью и соединены с валами рычагов одной пары колес.
В предпочтительном варианте выполнения транспортное средство имеет зубчатый дифференциальный механизм, который снабжен средством блокировки одного из ведомых звеньев относительно ведущего звена.
Средство блокировки имеет зубчатую сцепную муфту с торцевым зацеплением зубчатых колес, первое из которых жестко соединено с упомянутым корпусом, а второе установлено на валу рычага балансирной подвески одного колеса с возможностью осевою перемещения и кинематически связано с приводом управления средством блокировки.
Связь с приводом управления средством блокировки выполнена в виде зубчатой передачи, состоящей из винтовой пары и зубчатой пары.
Транспортное средство может быть снабжено дополнительным приводом перемещения другой пары колес в режиме шагающего движения.
Колеса этой другой пары установлены на концах вала, который соединен с упомянутым дополнительным приводом через червячную передачу.
Изобретение поясняется чертежами.
Фиг. 1 - кинематическая схема привода движителей.
Фиг. 2 - схема стабилизации при развернутом положении балансиров колес.
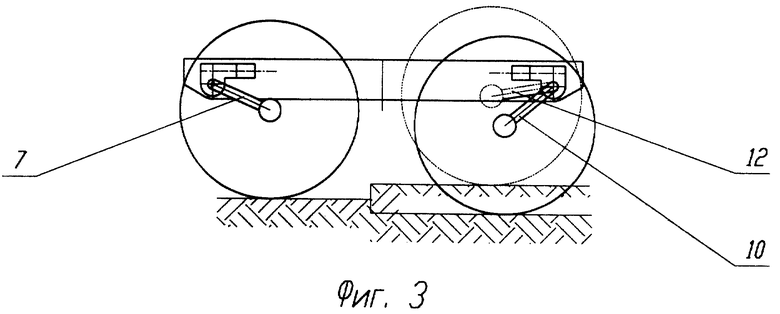
Фиг. 3 - схема стабилизации при компактном положении балансиров колес.
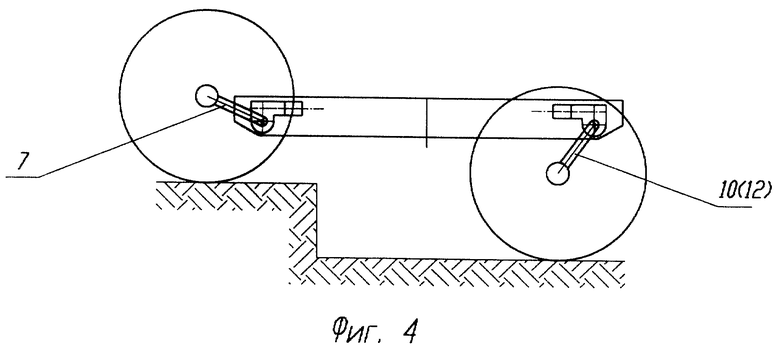
Фиг. 4 - схема преодоления препятствия.
Транспортное средство высокой проходимости включает (фиг. 1) раму 1, первую пару колес 2 и 3, вторую пару колес 4 и 5, вал 6, на концах которого установлены продольные рычаги 7 и 8 балансирной подвески первой пары колес 2 и 3, вал 9, на одном конце которого установлен продольный рычаг 10 балансирной подвески колеса 4, вал 11, на одном конце которого установлен продольный рычаг 12 балансирной подвески колеса 5, первый привод 13 перемещения колес 2 и 3 в режиме шагающего хода, второй привод 14 и зубчатый дифференциальный механизм 15. В пассивном режиме дифференциальный механизм 15 обеспечивает адаптивность прилегания колес к поверхности грунта (т.е. уравнивает нагрузки на грунт со стороны разных колес, исключая возможность опоры транспортного средства на три колеса), а при активном режиме дифференциальный механизм обеспечивает шагающий режим движения колес 4 и 5.
На одном конце каждого продольного рычага 7, 8, 10, 12 балансирной подвески соответственно установлены двигатели 16 для перемещения колес 2-5 в ведущем режиме качения.
Зубчатый дифференциальный механизм 15 выполнен в виде планетарной передачи с солнечными зубчатыми, например коническими, колесами 17 и 18, которые находятся в зацеплении с сателлитом, который установлен на корпусе 19 с внутренней стороны.
На наружной цилиндрической поверхности корпуса 19 расположен венец зубчатого колеса 20, образующего зубчатую пару с колесом 21.
Привод 14 кинематически связан через червяк 22, червячное колесо 23, промежуточный вал 24, зубчатое колесо 21 и зубчатое колесо 20 с корпусом 19 зубчатого дифференциального механизма 15 для перемещения колес в режиме шагающего движения.
Солнечное зубчатое коническое колесо 17 зубчатого дифференциального механизма 15 установлено на конце вала 9 с противоположной стороны от продольного рычага 10 балансирной подвески.
Солнечное зубчатое коническое колесо 18 зубчатого дифференциального механизма 15 установлено на конце вала 11 с противоположной стороны от каждого продольного рычага 12 балансирной подвески.
Конические колеса 17 и 18 смонтированы в корпусе 19 зубчатого дифференциального механизма 15 так, что имеют общую геометрическую ось, которая совпадает с геометрическими осями валов 9 и 11.
Зубчатый дифференциальный механизм 15 снабжен средством 25 блокировки ведущего звена - корпуса 19 относительно ведомого звена - солнечного зубчатого конического колеса 18.
Средство 25 блокировки состоит из привода 26 управления, зубчатой сцепной муфты 27 с торцевым зацеплением первого зубчатого колеса 28 и второго зубчатого колеса 29, а также зубчатой передачи 30, состоящей из винтовой пары 31 и зубчатой пары 32.
Первое зубчатое колесо 28 муфты 27 жестко соединено с корпусом 19, а ее второе зубчатое колесо 29 установлено на шлицах вала 9 с возможностью осевого перемещения.
Первый привод 13 предназначен для развертывания рычагов 7 и 8 первой пары колес 2 и 3, а второй привод 14 предназначен для развертывания рычагов 10 и 11 второй пары колес 4 и 5 положения балансирной подвески из компактного положения (фиг. 2 и 3) в рабочее положение.
При включении только двигателей 16 осуществляется обычный режим движения рамы 1 транспортного средства в ведущем режиме качения.
При переходе на шагающий режим движения требуется установка рычагов 7, 8, 10, 11 в однозначное положение относительно рамы 1.
При включении только приводов 13 и 14 осуществляется режим шагающего движения рамы 1 транспортного средства при индивидуальной последовательности блокировки двигателей 16.
Наличие двух пар колес 2, 3, 4, 5 совместно с рычагами 7, 8, 10, 11 балансирной подвески позволяет транспортному средству реализовать различные походки, выбор которых зависит от высоты препятствий на грунте и цели передвижения (одновременное перемещение пары колес или попеременное перемещение колес пары).
Включение средства блокировки корпуса 19 зубчатого дифференциального механизма 15 относительно конического колеса 17 от привода 25 управления позволяет транспортному средству преодолевать более высокие препятствия при движении по пересеченной местности, которое вследствие этого обладает более высокой проходимостью.
Возможность расположения продольных рычагов балансирных подвесок разных пар колес навстречу друг другу обеспечивает высокую маневренность за счет минимального радиуса поворота транспортного средство и минимальный габарит при его транспортировке к месту назначения.
Таким образом, транспортное средство позволяет выбрать наиболее выгодный для данного рельефа местности режим передвижения, что в максимальной степени будет способствовать выполнению поставленной задачи, особенно если учесть, что подобные транспортные средства предназначены, как правило, для работы с дистанционным управлением, когда оператор далеко не всегда может точно определить характер преодолеваемых препятствий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| АДАПТАЦИОННЫЙ ШАРИКОВИНТОВОЙ ПРИВОД ВАСИЛЬЕВА | 2003 |
|
RU2238456C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523508C2 |
| Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота | 2016 |
|
RU2652371C1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА ЧЕТЫРЁХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666080C1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ (ВАРИАНТЫ) | 2011 |
|
RU2483940C1 |

Изобретение относится к самоходным транспортным средствам специального назначения, в частности телеуправляемым транспортным средствам для осмотра объектов при проведении антитеррористических мероприятий. Транспортное средство включает раму, первую и вторую пары колес, продольные рычаги балансирной подвески каждой пары колес с валами, которые установлены на раме, двигатели для перемещения каждого из упомянутых колес в ведущем режиме качения и привод для перемещения колес в режиме шагающего движения по крайней мере для одной из упомянутых пар колес. Средство снабжено симметричным дифференциальным зубчатым механизмом, который имеет ведущее звено и два ведомых звена, ведущее звено выполнено в виде корпуса и кинематической связью соединено с приводом для перемещения одной из упомянутых пар колес в режиме шагающего движения. Ведомые звенья выполнены в виде конических колес с общей геометрической осью и соответственно соединены с валами упомянутых рычагов одной пары колес. Дифференциальный механизм снабжен средством блокировки одного из ведомых звеньев относительно ведущего звена. Изобретение направлено на повышение маневренности и уровня профильной проходимости транспортного средства, а также на повышение компактности при транспортировке. 5 з.п. ф-лы, 4 ил.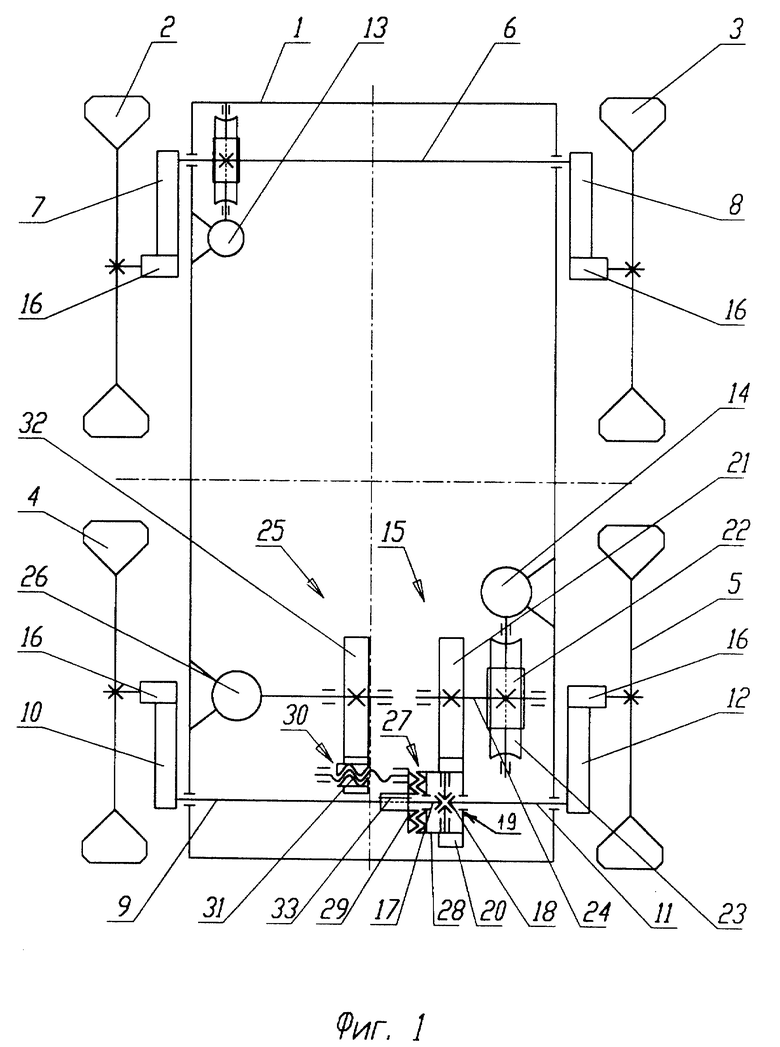
| Способ непрерывного передвижения транспортного средства с колесношагающим движителем в колесно-шагающем режиме | 1976 |
|
SU640897A1 |
| US 3747717 А, 24.07.1973 | |||
| US 3842926 А, 22.10.1974 | |||
| US 3057319 А, 09.10.1962 | |||
| JP 60148780 А, 06.08.1985. | |||
