УРОВЕНЬ ТЕХНИКИ
В патенте США 6,670,905, имя автора изобретения по которому упоминается в настоящем документе и который включен в настоящий документ путем ссылки, описан активируемый с помощью GPS детектор радаров, который использует GPS для содействия в управлении не относящимися к полиции или иными не связанными с ней источниками сигналов радаров, что позволяет приемнику динамически улучшать выполняемую им обработку таких источников для сокращения ложных предупреждений. Приемник делает привязку к ранее сохраненной в памяти информации с географической привязкой по таким источникам и сравнивает текущее местоположение приемника с местоположениями известных стационарных источников ложных предупреждений о радарах для улучшения обработки обнаружения таких источников. Когда приемник находится в пределах порогового расстояния от хранящегося в памяти источника ложных предупреждений, приемник подавляет предупреждения в частотных диапазонах или поддиапазонах, которые коррелируют с частотой известного источника ложных предупреждений. Ложные источники могут идентифицироваться вручную и «блокироваться» пользователем, либо идентифицироваться автоматически на основании множества неоднократных обнаружений источника приемником в конкретном географическом районе.
Системы, использующие изобретение патента ‘905, успешно запущены в серийное производство заявителем данной заявки и оказались конкурентоспособными, но у таких систем остаются определенные слабые места, которые будут рассматриваться в настоящем документе.
Одним из слабых мест являются ложные предупреждения о радарах, создаваемые оборудованием контроля дорожного движения, установленным во многих крупных городах. Сигналы от датчиков контроля дорожного движения появляются в диапазонах полицейских радаров и излучаются короткими импульсами с постоянным периодом. Поскольку датчики контроля дорожного движения географически фиксированы и работают в постоянном диапазоне частот, пользователь детектора радаров может вручную блокировать предупреждения о датчике контроля дорожного движения; однако сигналы датчика контроля дорожного движения не появляются достаточно регулярно, чтобы они надежно блокировались автоматически по меньшей мере при числе обнаружений, не превышающем нормальное. В ответ на такой источник ложных сигналов заявитель разработал способ подавления датчиков контроля дорожного движения (TSR), который осуществляет поиск характерного периода и частоты систем датчиков контроля дорожного движения и подавляет предупреждения об этих системах с помощью логики обработки, отдельной от блокировки на основании местоположения, описанной в патенте ‘905. Поскольку эта логика является отдельной от блокировок на основании местоположения, полицейский радар или подобные полицейским источники ложных сигналов, появляющиеся в том же диапазоне частот и в том же географическом районе, что и сигнал TSR, не будут подавляться с помощью метода TSR, являющегося преимущественным по отношению к блокировке частот на основании местоположения в данном районе, которая, возможно, подавит также сигналы полиции.
Еще одним слабым местом является возрастающее число бортовых источников радиолокационного излучения. К примерам относятся установленные на транспортных средствах радарные системы для контроля полосы движения, адаптивного круиз-контроля, предупреждения столкновений, автоматизированной парковки и т.п., которые в совокупности будут называться в настоящем документе «системами помощи в управлении транспортным средством». Одним из конкретных примеров таких систем является система Distronic компаний Mercedes и Daimler, которая излучает в диапазоне К на частоте 24,125 ГГц для обеспечения адаптивного круиз-контроля транспортного средства, который осуществляется в диапазоне, используемом полицией и обычно обнаруживаемом детектором радаров всякий раз, когда он находится вблизи действующей системы Distronic. Системы помощи в управлении транспортным средством часто создают мешающее ложное предупреждение, когда детектор радаров пропускает транспортное средство-источник, и такое ложное предупреждение не может быть подавлено на основании местоположения, поскольку источником сигнала является движущееся транспортное средство. Помеха становится критической, когда само транспортное средство с детектором радаров содержит систему помощи в управлении транспортным средством; постоянное предупреждение в такой ситуации по существу ставит водителя автомобиля перед выбором между отключением целой полосы частот обнаружения радаров (или полным отказом от обнаружения радаров) и отключением системы помощи в управлении транспортным средством.
В настоящее время заявителем проводятся работы по идентификации характерных периодов или иных совокупностей параметров систем помощи в управлении транспортным средством аналогично тому, как это осуществлялось для TSR, и некоторые из них были эффективно идентифицированы и подавлены с помощью отдельной методики, подобной используемой для TSR. Однако некоторые системы помощи в управлении транспортным средством до настоящего времени не поддаются эффективному определению характерных параметров указанным способом.
Третье слабое место существующих систем состоит в том, что блокировки на основании местоположения могут потенциально препятствовать предупреждению о полицейских радарах, которое осуществляется в том же диапазоне частот и в пределах географической дальности стационарного источника. По мере того, как детекторы радаров становятся более чувствительными, эффективная протяженность зоны блокировки по местоположению должна увеличиваться для обеспечения подавления предупреждений из-за ложного сигнала, что влечет за собой также увеличение географической зоны, в которой предупреждения будут осуществляться также по другим источникам в тех же диапазонах частот, включая источники радиолокационного излучения полиции. Основанные на местоположении методы блокировки обычно критикуют за возможность того, что детектор радаров не сможет предупредить о полицейском радаре, который может совпасть по местоположению и частоте с хранящимся в памяти ложным сигналом. Было бы целесообразно усовершенствовать способ обработки стационарных ложных сигналов для уменьшения вероятности того, что предупреждение о реальном полицейском радаре будет подавлено.
Последним слабым местом существующих систем является продолжающееся внедрение «мгновенного включения» и технологии контроля скорости в пределах прямой видимости. Детектор радаров обеспечивает заблаговременное предупреждение о полицейском контроле скорости путем обнаружения контроля других транспортных средств, как правило, находящихся впереди транспортного средства, содержащего детектор радаров. Современные радары-детекторы, которые работают в диапазоне Ка, могут оперативно включаться и выключаться для каждого транспортного средства. Если имеется достаточно длительный интервал между применениями детектора, детектор радаров не сможет зарегистрировать паразитные излучения радара от предыдущих запросов, чтобы выдать заблаговременное предупреждение о применении радара. Определение скорости с помощью лазера (лидара) является еще большей проблемой, поскольку оно, как правило, осуществляется в пределах прямой видимости и обеспечивает очень незначительное заблаговременное предупреждение о его применении, если вообще обеспечивает. В ответ на эти проблемы заявитель и другие разработали социальные сети, с помощью которых водители могут публиковать в социальной сети связанные с радарами события и случаи наблюдения полиции, чтобы предупреждение могло быть передано другим водителям, приближающимся к этому району. К сожалению, пользователи социальных сетей часто сообщают о действиях полиции, которые в действительности не являются постами контроля скорости, например пользователи социальных сетей могут предупреждать о полицейском транспортном средстве, которое движется вместе с транспортным потоком, ожидает на светофоре перекрестка или участвует в других действиях, которые не характерны для поста контроля скорости с фиксированным местоположением. Предупреждения, которые могут быть подтверждены, например, посредством обнаружения радаров, являются более надежными, но социальная сеть не может полагаться только на предупреждения, основанные на радарах, поскольку полицейская машина в районе патрулирования на посту контроля скорости может использовать радар или лидар мгновенного включения, и в этом случае не каждое транспортное средство будет подвергаться воздействию радара. В связи с этим, было бы целесообразно создать способ лучшей идентификации конкретных ситуаций, которые действительно свидетельствуют о посте контроля скорости, например, о полиции, расположенной на обочине и контролирующей проходящий транспорт либо включившей свой проблесковый маяк вблизи остановившегося транспортного средства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение устраняет недостатки уровня техники путем усовершенствования детектора радаров в соответствии с несколькими различными аспектами.
В соответствии с первым аспектом настоящего изобретения проблема ложных предупреждений от систем помощи в управлении транспортным средством решается введением в работу детектора радаров последовательности блокировки локального источника. Последовательность блокировки локального источника может выполняться в любой момент времени работы детектора, но в одном примере она выполняется, когда детектор радаров включается впервые. В последовательности блокировки локального источника детектор радаров ищет сигналы радаров, которые постоянно присутствуют и/или оказываются независимыми от местоположения, следовательно, являются характерными для систем помощи в управлении транспортным средством на транспортных средствах, содержащих детектор радаров. При нахождении такого сигнала детектор радаров идентифицирует центральную частоту сигнала и запоминает эту центральную частоту для последующей привязки. После этого детектор будет подавлять предупреждения о сигнале радара, который обнаруживается на частотах вблизи сохраненной в памяти центральной частоты. Центральная частота может находиться в любом из диапазонов чувствительности детектора радаров, включая диапазон К, диапазон Ка или диапазон Х. Кроме того, детектор может иметь настройку для активации или деактивации последовательности блокировки локального источника, чтобы указанную последовательность можно было бы деактивировать, например, для транспортных средств, не имеющих систем помощи в управлении транспортным средством. Кроме того, детектор может идентифицировать случаи, в которых два различимых сигнала оказываются в пределах диапазона сохраненной центральной частоты, и в таких случаях детектор будет выдавать предупреждение (при условии отсутствия применимой блокировки на основании местоположения), посредством этого по возможности избегая подавления предупреждений о полицейских радарах.
Во втором аспекте в изобретении предлагается усовершенствованный способ подавления сигналов вблизи известного местоположения источника ложных сигналов. В частности, в том случае, если детектор обнаружит сигнал радара и найдет соответствующий ему сохраненный в памяти ложный сигнал (то есть обнаруженный сигнал находится в пределах поддиапазона частот сохраненного в памяти ложного сигнала, а детектор находится в некотором местоположении вблизи сохраненного в памяти и известного источника ложных сигналов), вместо подавления принимаемого сигнала детектор сначала сравнивает мощность принимаемого сигнала с пороговой мощностью, которая вычисляется на основании расстояния от детектора до сохраненного ложного сигнала, и если принимаемый сигнал превышает пороговую мощность, предупреждение о принимаемом сигнале передается в более значительной степени, чем если бы принимаемый сигнал находился ниже пороговой мощности. Например, сигналы ниже пороговой величины могут передаваться с помощью минимального визуального предупреждения без сопровождающих предупредительных звуковых сигналов, в то время как сигналы выше пороговой величины могут передаваться с визуальной и звуковой информацией, как и при других обнаружениях сигналов радаров. В конкретном описываемом варианте осуществления пороговая величина устанавливается на 3 дБ выше, чем ожидаемая мощность сигнала, при этом ожидаемая мощность сигнала вычисляется по закону обратной квадратичной зависимости между мощностью сигнала и расстоянием от детектора радаров до сохраненного в памяти местоположения источника ложных сигналов. В наиболее конкретном варианте осуществления сигналы ниже пороговой величины отслеживаются в течение некоторого времени, и в том случае, если они постоянны во времени, формируется предупреждение об этих сигналах, несмотря на то, что мощность сигналов находится ниже пороговой величины.
В соответствии с третьим аспектом, в данном изобретении предлагается усовершенствованный способ идентификации активности полиции, которая свидетельствует о посте контроля скорости, для повышения достоверности предупреждений об активности полиции, передаваемых по социальным сетям. Для реализации этого способа в детектор радаров встроена камера, причем камера направлена на дорогу вблизи транспортного средства. Детектор радаров собирает с камеры данные изображений и обрабатывает эти данные для идентификации в изображении полицейских транспортных средств. В конкретных вариантах осуществления с помощью выполняемой детектором радаров обработки оцениваются последовательные изображения для идентификации проблесковых сигналов, характерных для проблескового маяка на полицейском или оперативном транспортном средстве. Еще в одном варианте осуществления с помощью выполняемой детектором радаров обработки оценивается одно или более изображений для идентификации совокупности параметров транспортного средства, которая характерна для полицейского транспортного средства (например, наличие проблескового маяка на крыше и/или высококонтрастных панелей), и/или транспортного средства, которое установлено для контроля дорожного движения, например, на обочине в положении, некоррелирующем с движением в пересекающихся направлениях на перекрестке. Детектор радаров может реагировать на изображение (изображения), свидетельствующее об активности полиции, путем автоматического формирования предупреждения другим водителям в социальной сети, либо путем предложения водителю транспортного средства формирование такого предупреждения, подлежащего подтверждению водителем транспортного средства.
Вышеуказанные и другие задачи и преимущества настоящего изобретения станут понятными из сопровождающих чертежей и их описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
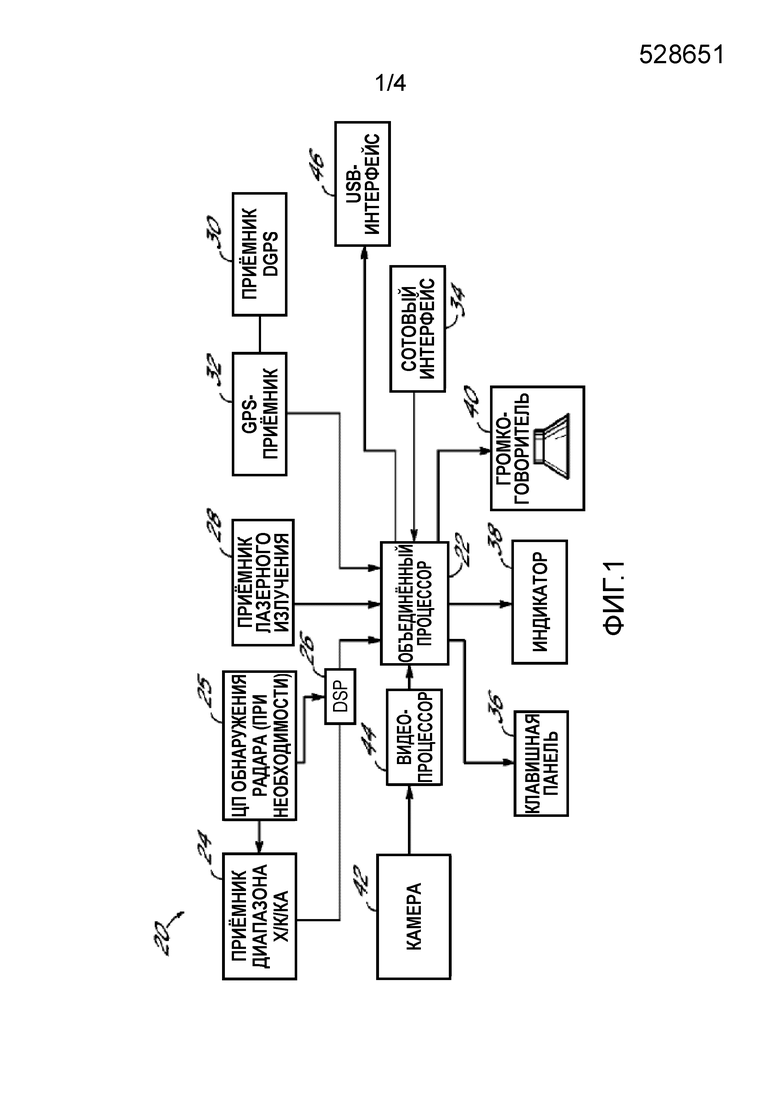
Фиг. 1 иллюстрирует блок-схему детектора радаров в соответствии с принципами настоящего изобретения;
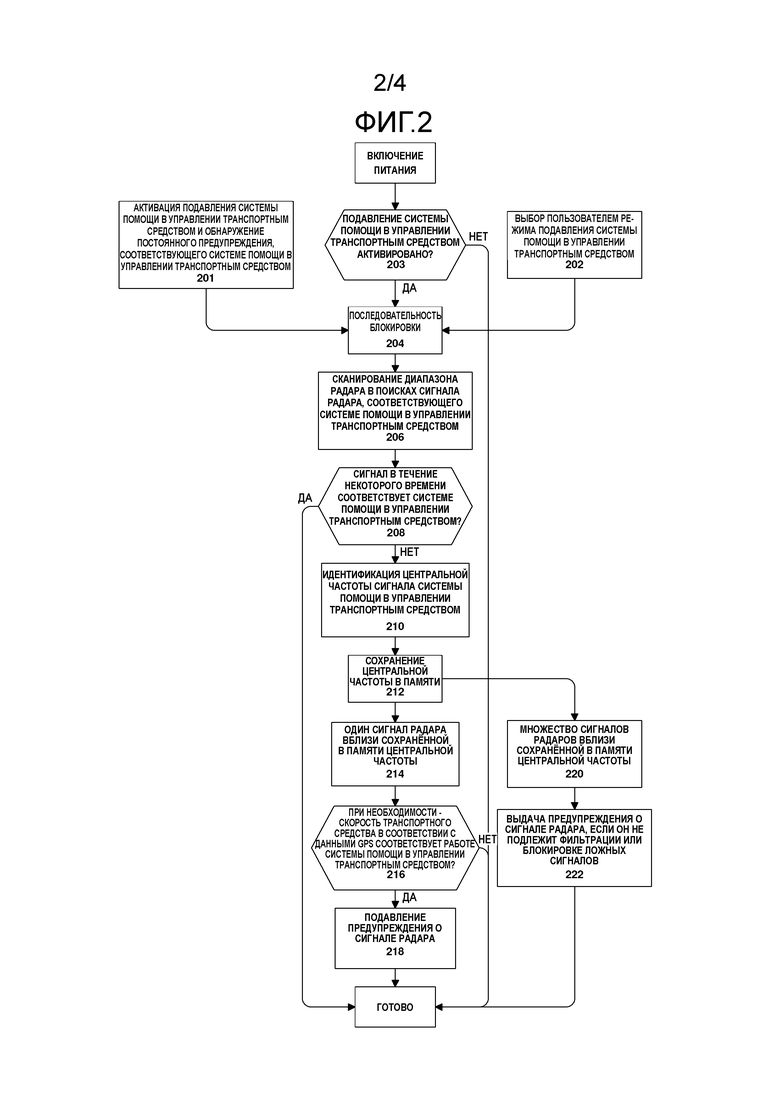
фиг. 2 иллюстрирует структурную схему работы изображенного на фиг. 1 детектора радаров, осуществляющего блокировку ложных сигналов, связанных с системами помощи в управлении транспортными средствами;
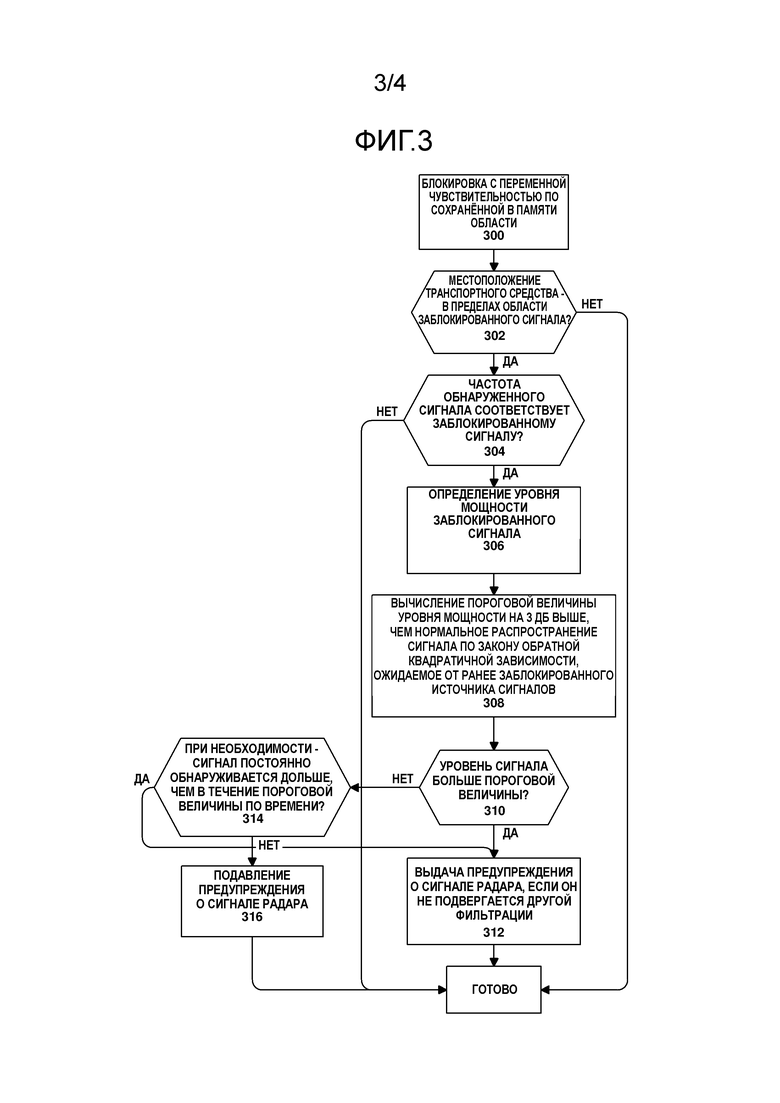
фиг. 3 иллюстрирует структурную схему работы изображенного на фиг. 1 детектора радаров, выполняющего оценку обнаруженного сигнала радара применительно к сохраненным в памяти местоположениям ложных сигналов;
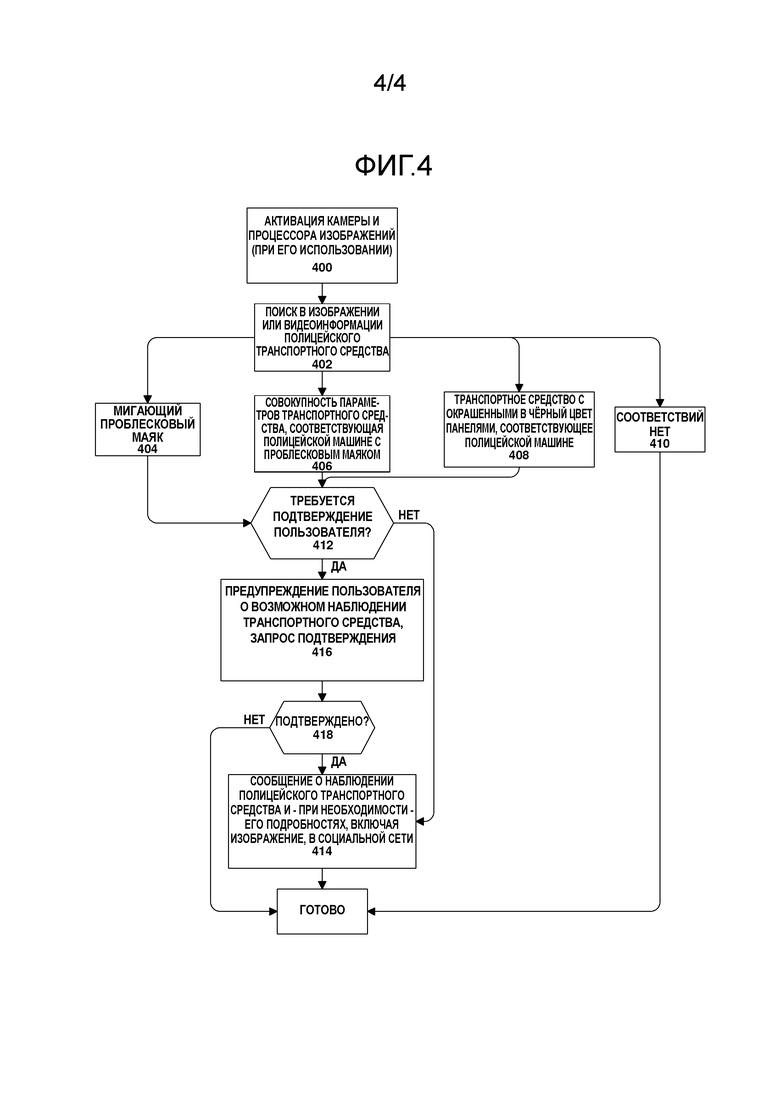
фиг. 4 иллюстрирует структурную схему работы изображенного на фиг. 1 детектора радаров, выполняющего оценку данных изображений или видеоданных с камеры, входящей в состав детектора.
Сопровождающие чертежи, которые включены в данное описание и составляют его часть, иллюстрируют варианты осуществления изобретения и вместе с приведенным выше общим описанием изобретения и приведенным ниже подробным описанием вариантов осуществления служат объяснением принципов изобретения.
Фиг. 1 иллюстрирует детектор 20 радаров в соответствии с принципами настоящего изобретения, который содержит объединенный процессор 22 для управления всеми функциями устройства. Объединенный процессор принимает информацию по сигналам радаров от традиционного приемника 24 микроволнового диапазона, соединенного с процессором 22 через цифровой сигнальный процессор (DSP) 26. Приемник 24 микроволнового диапазона и DSP 26 могут использовать любой из известных методов для обнаружения сигналов радаров, для подавления шумов и улучшения различения между реальными и паразитными сигналами полицейских радаров. Кроме того, приемник 24 и DSP 26 могут управляться при необходимости вторым центральным процессором (ЦП) 25, который может обеспечивать дополнительную оценку сигналов помимо той оценки, которая может выполняться с помощью DSP.
Процессор 22 дополнительно соединен с приемником 28 лазерного излучения для обнаружения сигналов полицейских лидаров. Процессор 22 дополнительно соединен с GPS-приемником 32 и отдельным приемником 30 дифференциальной системы GPS (DGPS), чтобы можно было использовать методики дифференциальной системы GPS в тех случаях, когда имеются сигналы радиомаяков.
Процессор 22 исполняет сохраненную программу, находящуюся в электрически-стираемом программируемом постоянном запоминающем устройстве (EEPROM) на кристалле или вне кристалла, флэш-памяти или масочном постоянном запоминающем устройстве (ROM). Процессор запрограммирован на управление обнаруженными сигналами и их передачу различными способами в зависимости от своей хранимой программы, включая способы, описываемые в настоящем документе.
Процессор связан с сотовым интерфейсом 34 для обеспечения взаимодействия социальной сети с серверами и данными от других детекторов радаров. В одном варианте осуществления сотовый интерфейс 34 включает в себя Bluetooth или иную совместимую с 802.1х радиосвязь для соединения с сотовым телефоном, смартфоном или иным сотовым устройством, которое может работать под управлением отдельного приложения, такого как приложение для смартфонов “Escort Live” заявителя. Еще в одном варианте осуществления сам сотовый интерфейс 34 может включать в себя сотовую радиосвязь для прямой связи с вышками сотовой связи. Для взаимодействия по социальной сети могут также использоваться другие технологии связи, такие как спутниковая телефонная связь, связь по сети передачи данных посредством WiFi, Bluetooth, радиосвязи 802.1х других видов, либо другие стандарты.
Детектор радаров дополнительно включает в себя клавишную панель или коммутационное устройство 36 ввода данных пользователем. Оперативные команды передаются пользователем в процессор 22 с помощью клавишной панели. Процессор 22 дополнительно соединен с индикатором 38, который может включать в себя один или более светодиодов для индикации различных состояний, либо - в устройстве с более широким набором средств - может включать в себя буквенно-цифровой или графический индикатор для выдачи пользователю более подробной информации. Предусмотрен также громкоговоритель 40, позволяющий процессору 22 передавать пользователю звуковую обратную связь в различных условиях предупреждения, как подробно рассматривается ниже.
Процессор 22 может дополнительно содержать камеру 42, установленную на обращенной вперед, обращенной вбок или обращенной назад поверхности устройства, и видеопроцессор 44, например, для обработки видеоизображений или статических изображений с камеры 42 в соответствии с описываемыми в настоящем документе способами.
Процессор 22 дополнительно соединен с интерфейсом 46 Универсальной последовательной шины (USB), который обеспечивает средство для выгрузки информации в процессор 22 и загрузки информации с него. USB-интерфейс 46 может использоваться для автоматизации ввода координатной информации в структуры данных в EEPROM 34. USB-интерфейс 46 может также использоваться для сопряжения детектора с отдельным ведущим компьютером или применением продукта, имеющим более значительную емкость запоминающего устройства, чем доступно из внутренней памяти. USB-интерфейс 46 может также использоваться с целью модификации микропрограммного обеспечения. Время от времени могут появляться обновления и исправления, например, через интернет-сайт разработчика. USB-интерфейс 46 позволит пользователю применять соответствующую модификацию микропрограммного обеспечения или исправление. USB-интерфейс 46 может также использоваться для добавления других пользовательских точек маршрута.
Далее, ссылаясь на фиг. 2, можно описать способы подавления ложных предупреждений, вызываемых системами помощи в управлении транспортным средством. Вообще говоря, изображенный на фиг. 2 способ использует «блокировку» на основании частоты (не на основании местоположения), которая может использоваться во всех детекторах радаров (детекторах, основанных или не основанных на GPS). Данная функция может быть активирована или деактивирована в Настройках устройства. В основанных на GPS детекторах постоянство наблюдаемого ложного сигнала с изменением скорости транспортного средства может использоваться в качестве фактора для деактивации заблокированного диапазона частот при диапазонах скоростей, в которых системы помощи в управлении транспортным средством не активируются.
Последовательность 204 блокировки активируется при различных обстоятельствах. Например, при включении (200) устройства, если режим подавления систем помощи в управлении транспортным средством активирован (203), выполняется последовательность 204. В соответствии с другим вариантом, когда пользователь сталкивается с помехами от систем помощи в управлении транспортным средством и в ответ активирует (202) режим подавления систем помощи в управлении транспортным средством с помощью последовательности нажатий кнопок, может быть выполнена последовательность блокировки. Третьей альтернативой является автоматическая активация (201) последовательности блокировки систем помощи в управлении транспортным средством после обнаружения постоянного во времени предупреждения, которое соответствует по частоте системе помощи в управлении транспортным средством.
Последовательность 204 блокировки сканирует (206) диапазон радара в поисках сигнала радара, соответствующего частотам известных систем помощи в управлении транспортными средствами. Затем сигнал оценивается (208) на согласованность во времени с периодом включения/выключения известной системы помощи в управлении транспортным средством. Если эти проверки проходят успешно, то на этапе 210 идентифицируется и сохраняется (212) в памяти центральная частота датчика ближнего действия системы помощи в управлении транспортным средством. Затем детектор дополняет указанную частоту сверху и снизу для обеспечения смещения как сигнала, так и - при необходимости - детектора радаров.
После сохранения блокировки в памяти, если (этап 214) детектор идентифицирует один сигнал в диапазоне сохраненной в памяти центральной частоты, он подавляет (218) предупреждение о сигнале. Например, устройство может отображать незначительную визуальную индикацию, что имеется обнаруженный сигнал, но установлено, что это система помощи в управлении транспортным средством. В качестве дополнительной проверки (этап 216) при необходимости в детекторе радаров с активированной системой GPS скорость транспортного средства в соответствии с данными приемника GPS может сравниваться с известными диапазонами скоростей работы системы помощи в управлении транспортным средством (некоторые системы не работают ниже пороговой скорости или выше пороговой скорости). С помощью такой проверки 216 при необходимости предупреждение подавляется только в том случае, если скорость транспортного средства соответствует работе системы помощи в управлении транспортным средством.
При сохранении блокировки в памяти, если (этап 220) детектор идентифицирует два сигнала в диапазоне сохраненной в памяти центральной частоты, то детектор переходит к этапу 220 и выдает нормальное предупреждение о сигнале радара, если сигнал не подвергается фильтрации по иным основаниям (например, фильтрации TSR или блокировке на основании определенного по GPS местоположения).
Далее, ссылаясь на фиг. 3, можно описать способы блокировки по местоположению. Основной принцип этого способа состоит в том, что в свободном пространстве электромагнитные волны подчиняются закону обратной квадратичной зависимости, который гласит, что плотность энергии электромагнитной волны обратно пропорциональна квадрату расстояния от точечного источника. Следовательно, уровень сигнала, измеряемый детектором радаров, будет изменяться пропорционально расстоянию между ним и источником сигнала, который обнаруживается детектором радаров. Способы подавления ложных сигналов на основании текущего местоположения предотвращают обнаружение всех «подходящих» сигналов, обнаруживаемых в области блокировки. Однако область блокировки может охватывать большую площадь, на которой детектор радаров является относительно чувствительным.
Значительное усовершенствование будет реализовано за счет переопределения области блокировки как «области, в которой чувствительность детектора радаров изменяется пропорционально расстоянию между ним и центрами внимания, которые образуют эту область». Полезный результат состоит в том, что полицейский радар, тем не менее, может быть указан, даже если частота полицейского радара соответствует одной из частот, которая блокируется для сигналов ложных предупреждений заданной области. Данный способ в связи с этим называется «Областью блокировки с переменной чувствительностью» или VSLR.
В существующей системе GPS без VSLR решение о блокировке принимается путем изучения текущего местоположения детектора, чтобы определить, попадает ли оно в какие-либо близлежащие области, которые для упрощения вычислений могут быть заданы восьмиугольной формы. Центр каждой из этих Восьмиугольных областей называется центром внимания. Для каждой перекрывающейся Восьмиугольной области выполняется сравнение между частотой обнаруженного сигнала и частотой сигналов, определенных как заблокированные в каждой области. При наличии соответствия существующие системы GPS будут подавлять сообщение о сигнале.
В усовершенствованном с помощью VSLR способе 300, изображенном на фиг. 3, после установления (302), что местоположение транспортного средства находится в области заблокированного сигнала, и установления (304), что частота обнаруженного сигнала является одной из частот, заблокированных в этой области, должны выполняться дополнительные этапы перед тем, как может быть принято решение о подавлении сигналов для каждого центра внимания.
На этапе 306 определяется уровень мощности обнаруженного сигнала, а на этапе 308 вычисляется пороговый уровень мощности сигнала, задаваемого приблизительно на 3 дБ выше, чем нормальное распространение сигнала по закону обратной квадратичной зависимости, ожидаемое от ранее заблокированного источника сигналов. Если реальный полицейский радар на заблокированной частоте работает вблизи заблокированного источника сигналов, полицейский радар должен указываться (и не подавляться), как только уровень его сигнала возрастет выше указанной пороговой величины в 3 дБ. В связи с этим, на этапе 310 уровень принимаемого сигнала сравнивается с пороговой величиной, и если он больше пороговой величины, на этапе 312 выдается предупреждение о сигнале радара, если сигнал не подвергается иной фильтрации, например, TSR или блокировке системы помощи в управлении транспортным средством, как указано выше. Однако, если сигнал находится ниже пороговой величины, то он рассматривается как сигнал от заблокированного стационарного источника, и (в зависимости от обработки при необходимости, рассматриваемой ниже) на этапе 316 предупреждения о сигнале подавляются.
Поскольку не исключено, что полицейский радар может работать в непосредственной близости от подавленного стационарного источника, важно, чтобы способ VSLR указывал на заблокированные сигналы, даже если они слабее, чем пороговая величина 3 дБ. В существующих продуктах заявителя обнаруженный заблокированный сигнал идентифицируется по минимальной визуальной индикации на индикаторе детектора радаров. Однако такая визуальная индикация может не предупредить надлежащим образом об истинном сигнале полицейского радара. В связи с этим, помимо использования пороговой величины по уровню сигнала, как указано выше, способ VSLR может при необходимости включать в себя этап 314 и использовать также длительность сигнала в качестве фактора при принятии решения о подавлении. В одном конкретном примере пороговая величина по времени вычисляется путем предварительного вычисления среднего значения разности между уровнем мощности обнаруженного сигнала и пороговым уровнем мощности. Назовем такую среднюю разность Х (измеряется в дБ). Если сигнал обнаруживается постоянно, он будет передаваться через (10 * (1+Х/4)) секунд после первого обнаружения. Таким образом, сигнал, который остается приблизительно на 4 дБ ниже пороговой величины, будет передаваться после 20-секундной задержки.
И пороговая величина уровня сигнала 3 дБ на этапе 308, и требование к длительности сигнала на этапе 314 будут применяться ко всем центрам внимания для всех заблокированных ложных сигналов, которые являются центрами близлежащих Восьмиугольных областей, охватывающих текущее местоположение. Однако следует отметить, что если критерий подавления для любого центра внимания приводит к решению подавить предупреждение о сигнале, ни один из остальных центров внимания не нуждается в рассмотрении по отношению к этому сигналу. Если все соображения по центрам внимания не приводят к решению о подавлении сигнала, сигнал будет передан.
Далее, ссылаясь на фиг. 4, можно объяснить способы настоящего изобретения с использованием камеры 42 (фиг. 1). В ходе своего регулярного исследования данных радара, данных социальных сетей и данных GPS процессор на этапе 400 активирует камеру и процессор изображений для оценки сцены, видимой для камеры. На этапе 402 процессор изображений или сам объединенный процессор ищет в изображении или видеоинформации, получаемых с камеры, присутствие полицейского транспортного средства или иного интересующего транспортного средства.
Одним из представляющих интерес обстоятельств (этап 404) является видеофильм, отражающий мигающий проблесковый маяк на дороге, обычно свидетельствующий о полицейских или иных оперативных транспортных средствах в соответствии со стандартизованной цветовой маркировкой. Мигающие полицейские сигналы убедительно свидетельствуют о контроле скорости в ограниченном районе.
Вторым представляющим интерес обстоятельством (этапы 406 и 408) является совокупность параметров транспортного средства на изображении дороги, которые соответствуют полицейской машине. Согласно этапу 406, транспортное средство с совокупностью параметров, которые включают в себя проблесковый маяк, перемещающийся по полю зрения так, что он указывает на стоящее на обочине транспортное средство контроля дорожного движения, свидетельствует о возможном посте контроля скорости. В соответствии с другим вариантом, согласно этапу 408, транспортное средство с окрашенными в черный цвет панелями, которое располагается аналогичным образом, вероятно, является полицейским транспортным средством и предполагает пост контроля скорости.
В том случае, если представляющие интерес обстоятельства не идентифицированы, обработка изображений выполняется вплоть до ее возобновления. Однако если представляющее интерес обстоятельство идентифицировано на этапе 404, 406 или 408, то на этапе 412 конкретное обстоятельство оценивается, чтобы определить, необходимо ли подтверждение пользователя. Некоторые обстоятельства, такие как мигающий проблесковый маяк, могут быть однозначно идентифицируемыми в отношении их связи с другими в социальной сети, в то время как другие события, такие как транспортное средство с окрашенными в черный цвет панелями, может представлять интерес или не представлять интереса. В связи с этим, подтверждение пользователя может потребоваться для одних обстоятельств и не потребоваться для других. Если на этапе 412 требуется подтверждение пользователя, то на этапе 416 пользователя предупреждают о возможном наблюдении полиции и запрашивают у него подтверждение, которое может быть выдано с помощью кнопки на детекторе или на шнуре, подключенном к детектору.
Если подтверждено конкретное наблюдение, либо если подтверждение не требуется, то наблюдение полицейского транспортного средства и его местоположение по GPS, а также - при необходимости - его подробности, такие как изображение или видеоинформация, направление и/или скорость транспортного средства, передаются в социальную сеть для использования при предупреждении остальных. Однако если наблюдение не подтверждается, обработка завершается без предупреждения социальной сети.
Настоящее изобретение описано применительно к нескольким вариантам осуществления, и некоторые из этих вариантов осуществления рассмотрены достаточно подробно. Однако объем изобретения не ограничивается этими вариантами осуществления, которые представлены в качестве примеров и не являются исключительными. Объем заявляемого изобретения определен нижеследующей формулой изобретения.
Изобретение относится к области радиосвязи. Техническим результатом является подавление ложных предупреждений о локально формируемых сигналах радаров. Детектор (10) радаров подавляет предупреждения от систем помощи в управлении транспортными средствами путем сканирования (206, 208) в поисках соответствующего сигнала радара; центральная частота сигнала сохраняется (212) в памяти, и детектор (10) подавляет (218) предупреждения о сигналах радаров вблизи этой частоты. Детектор использует усовершенствованный способ (300) для подавления сигналов вблизи известного местоположения источника ложных сигналов; в случае, если детектор обнаруживает сигнал радара и находит соответствующий ему сохраненный в памяти ложный сигнал, детектор сначала сравнивает (310) мощность принятого сигнала с пороговой мощностью, которая вычисляется (308) на основании расстояния от детектора до сохраненного в памяти ложного сигнала, и подавляет лишь сигналы ниже пороговой величины. 3 н. и 17 з.п. ф-лы, 4 ил.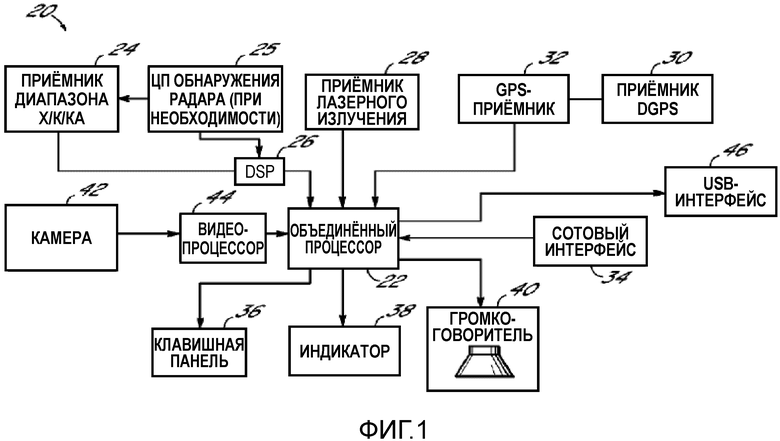
1. Детектор радаров, содержащий схему для идентификации и подавления предупреждений о локально формируемых сигналах радаров от систем помощи в управлении транспортными средствами, причем детектор радаров содержит радарный приемник для обнаружения сигналов радаров и электронные схемы обработки сигналов для управления радарным приемником и оценки обнаруженных сигналов радаров, причем электронные схемы обработки сигналов содержат процессор, запрограммированный посредством программных средств для:
a) выполнения последовательности блокировки во время работы детектора радаров, причем последовательность блокировки содержит сканирование радиолокационного диапазона в поисках сигнала радара от системы помощи в управлении транспортным средством, который последовательно принимается и соответствует передачам сигналов систем помощи в управлении транспортными средствами от транспортного средства, содержащего детектор радаров;
b) идентификации центральной частоты излучения сигнала системы помощи в управлении транспортным средством, идентифицированного на предыдущем этапе, и сохранения центральной частоты; и после этого
c) подавления предупреждений о сигналах радаров на частотах вблизи сохраненной центральной частоты.
2. Детектор радаров по п. 1, в котором последовательность блокировки локального источника выполняется, когда на детектор радаров впервые подается питание.
3. Детектор радаров по п. 1, в котором в последовательности блокировки локального источника электронные схемы обработки сигналов осуществляют сканирование в поисках сигналов радаров, которые принимаются последовательно во времени.
4. Детектор радаров по п. 1, в котором в последовательности блокировки локального источника электронные схемы обработки сигналов осуществляют сканирование в поисках сигналов радаров, которые последовательно принимаются во множестве местоположений.
5. Детектор радаров по п. 1, в котором центральная частота находится в одном из диапазона К, диапазона Ка или диапазона Х.
6. Детектор радаров по п. 1, в котором электронные схемы обработки сигналов выполнены с возможностью перевода в рабочий режим, в котором последовательность блокировки локального источника не выполняется.
7. Детектор радаров по п. 1, в котором электронные схемы обработки сигналов выполняют функцию различения, чтобы установить, что два различимых сигнала появляются вблизи сохраненной в памяти центральной частоты, причем детектор радаров выдает предупреждение по меньшей мере в один из моментов, когда два различимых сигнала обнаруживаются вблизи сохраненной в памяти центральной частоты.
8. Детектор радаров, включающий в себя схему для подавления предупреждений детектора радаров о ложных сигналах вблизи известного местоположения источника ложных сигналов, причем детектор радаров содержит радарный приемник для обнаружения сигналов радаров, электронные схемы обработки сигналов для управления радарным приемником и оценки обнаруженных сигналов радаров и запоминающее устройство для известных местоположений источников ложных сигналов, причем электронные схемы обработки сигналов содержат процессор, запрограммированный посредством программных средств для:
a) обнаружения сигнала радара;
b) идентификации сохраненной записи о местоположении известного источника ложных сигналов, частота которого коррелирует с обнаруженным сигналом радара;
c) сравнения мощности принятого сигнала с пороговой мощностью, причем пороговая мощность вычисляется на основании расстояния от детектора до сохраненного ложного сигнала;
d) изменения или невыдачи предупреждения о принятом сигнале, если принятый сигнал находится ниже пороговой мощности.
9. Детектор радаров по п. 8, в котором предупреждение о принятом сигнале передается с помощью визуального, но не звукового предупреждения, когда мощность принятого сигнала ниже пороговой величины.
10. Детектор радаров по п. 8, в котором предупреждение о принятом сигнале передается с помощью визуального и звукового предупреждения, когда мощность принятого сигнала выше пороговой величины.
11. Детектор радаров по п. 8, в котором пороговая величина установлена на 3 дБ выше чем ожидаемая мощность сигнала для источника ложных сигналов.
12. Детектор радаров по п. 11, в котором ожидаемая мощность сигнала вычисляется по закону обратной квадратичной зависимости между мощностью сигнала и расстоянием от детектора радаров до сохраненного в памяти местоположения источника ложных сигналов.
13. Детектор радаров по п. 12, в котором отслеживаются сигналы с мощностью, падающей ниже пороговой величины, и в том случае, если они постоянны, формируется предупреждение.
14. Детектор радаров, реализующий способ идентификации визуальной информации, относящейся к контролю скорости, и содержащий:
a) корпус;
b) радарный приемник для обнаружения сигналов радаров, установленный в корпусе;
c) электронные схемы для управления радарным приемником и оценки обнаруженных сигналов радаров, установленные в корпусе;
d) камеру, установленную в корпусе и направленную вперед от передней стороны детектора радаров в направлении приближающейся дороги при использовании детектора радаров,
причем электронные схемы собирают с камеры данные изображений и обрабатывают эти данные для идентификации визуальной информации, указывающей на контроль скорости, в данных изображений.
15. Детектор радаров по п. 14, в котором электронные схемы оценивают последовательные во времени изображения для идентификации мигающих световых сигналов, характерных для работающего проблескового маяка на полицейском или другом оперативном транспортном средстве.
16. Детектор радаров по п. 14, в котором электронные схемы оценивают одно или более изображений для идентификации совокупности параметров транспортного средства, характерных для полицейского транспортного средства.
17. Детектор радаров по п. 16, в котором совокупность параметров транспортного средства включает в себя установленный на крыше проблесковый маяк.
18. Детектор радаров по п. 16, в котором совокупность параметров транспортного средства включает в себя высококонтрастно окрашенные панели.
19. Детектор радаров по п. 16, в котором совокупность параметров транспортного средства включает в себя то, что транспортное средство установлено для контроля дорожного движения.
20. Детектор радаров по п. 14, в котором электронные схемы формируют предупреждение другим водителям в социальной сети либо самостоятельно, либо после подтверждения водителем транспортного средства, в ответ на одно или более изображений, указывающих на контроль скорости.
| US 2009256736 A1, 15.10.2009 | |||
| US 5852417 A, 22.12.1998 | |||
| US 2010214149 A1, 26.08.2010 | |||
| US 2012136559 A1, 31.05.2012 | |||
| JP 2006171001 A, 29.06.2006 | |||
| US 6201493 B1, 13.03.2001 | |||
| US 2006132349 A1, 22.06.2006 | |||
| Устройство для разведения шелковичных червей | 1934 |
|
SU40653A1 |
| CN 101889215 A, 17.11.2010 | |||
| Устройство для автоматического пуска и регулирования скорости электрического двигателя переменного тока | 1951 |
|
SU96951A1 |

