ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к технологии измерения расстояния до объекта путем использования источника света (лазера или диода), излучающего свет к объекту, и анализа отраженного света.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Оптическое обнаружение и определение дальности (LIDAR, лидар) является технологией дистанционного зондирования, которая измеряет расстояние путем облучения цели лазерным светом и анализа отраженного света. Для навигации автономных наземных транспортных средств лидар является одним из основных инструментов для обнаружения препятствий, сбора 3D мобильных данных и генерации 3D карты.
Из предшествующего уровня техники известны решения, раскрытые в документах US 8,767,190 B2 и US 7,969,558 B2. Документы US 8,767,190 B2 и US 7,969,558 B2 раскрывают основанные на лидаре 3D системы измерения облака точек. Известные системы содержат основание, корпус, множество фотонных передатчиков и фотонных детекторов, размещенных в корпусе, поворотный двигатель, который поворачивает корпус относительно основания, и компонент связи, который обеспечивает передачу сигналов, генерируемых фотонными детекторами, к внешним компонентам.
В решении предшествующего уровня техники, операция сканирования в горизонтальной плоскости обеспечивается непрерывным механическим вращением системы сканирования в горизонтальной плоскости, выполняемой механической поворотной системой.
В то же время диапазон сканирования и угловое разрешение в вертикальной плоскости системы согласно решению предшествующего уровня техники определяются числом и местоположениями источников (Tx) и приемников (Rx) света. Например, различные источники излучают сигналы в различных направлениях в вертикальной плоскости с шагом Vfov/(N-1), где Vfov представляет собой FoV (поле зрения) в вертикальной плоскости, N - число источников. Например, если N=16, Vfov=30°, то угловое разрешение в вертикальной плоскости равно 2°.
Однако в решениях предшествующего уровня техники имеется ряд проблем, требующих решения:
1) большой размер системы сканирования из-за ее сложности;
2) высокая сложность системы сканирования из-за ручной регулировки поворотной системы на предпродажной стадии и большого числа Tx/Rx;
3) чувствительность к экстремальному торможению: может потребоваться новая ручная регулировка;
4) максимальное вертикальное разрешение определяется местоположением и числом источников;
5) низкая надежность системы сканирования из-за наличия механической поворотной системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом настоящего изобретения предложена система отклонения луча (пучка) для лидара. Упомянутая система основана на отражателе (зеркале) с магнитной подвеской (магнитной левитацией), левитирующем в магнитном поле c управлением по 6 степеням свободы (DoF). Предложенная система содержит основание, постоянные магниты, отражатель с магнитной подвеской, прикрепленный к постоянным магнитам, и катушки управления, установленные на основании. Верхняя сторона отражателя с магнитной подвеской покрыта материалом, который может отражать световой луч. Положение каждого постоянного магнита в пространстве определяется электромагнитным взаимодействием между магнитом и катушками управления, которые возбуждаются током. Отражатель с магнитной подвеской выполнен с возможностью левитировать ввиду упомянутого электромагнитного взаимодействия постоянных магнитов и катушек управления. Катушки управления содержат катушки Н-управления (катушки управления по горизонтали), определяющие положение отражателя с магнитной подвеской в горизонтальном направлении, и катушки V-управления (катушки управления по вертикали), управляющие положением отражателя с магнитной подвеской в вертикальном направлении.
Упомянутые катушки управления по существу являются электромагнитами.
В соответствии с другим аспектом настоящего изобретения предложена система сканирования. Система сканирования содержит: вышеупомянутую систему отклонения луча; источник света, выполненный с возможностью излучать световой луч в направлении отражателя; и приемник, выполненный с возможностью принимать отраженный луч от отражателя. Например, лазер или светоизлучающий диод (LED) может быть использован в качестве источника света.
В соответствии с другим аспектом настоящего изобретения предложена система лидара. Система лидара содержит вышеупомянутую систему сканирования и блок обработки, выполненный с возможностью анализировать результаты работы системы сканирования для обнаружения объектов и оценивания расстояния до упомянутых обнаруженных объектов.
В соответствии с другим аспектом настоящего изобретения предложен способ обнаружения объекта и измерения расстояния до упомянутого объекта с использованием вышеупомянутой системы лидара. Способ содержит этапы излучения светового луча к отражателю посредством источника света; определение направления светового луча путем управления положением и углом наклона отражателя; прием луча, отраженного объектом; оценивание временного интервала от времени излучения до времени приема луча и вычисление расстояния до упомянутого объекта на основе результата упомянутой оценки.
Ключевой аспект настоящего изобретения заключается в использовании отражателя с магнитной подвеской для выполнения 3D-сканирования в лидаре. А именно, система с магнитной подвеской с шестью степенями свободы с вращающимся отражателем для 3D-сканирования используется в предложенном лидаре. Такая структура не использует механический контакт с отражателем, тем самым обеспечивая длительный срок службы системы лидара.
Не требуется сложная предпродажная регулировка. Предложенная система лидара может использовать только один источник и один приемник для выполнения 2D-сканирования.
Кроме того, настоящее изобретение может быть реализовано в форме компактного устройства, т.е. размеры системы сканирования могут быть уменьшены.
Настоящее изобретение обеспечивает полностью электронное (адаптивное) управление системой сканирования и возможность самокалибровки. Самокалибровка может быть необходимой после плановых или неплановых отключений питания. Адаптивное управление обеспечивается в каждом положении системы отклонения луча. Поле зрения и угловое разрешение системы сканирования может динамически изменяться. Вертикальное разрешение определяется током, подаваемым в катушки управления.
Настоящее изобретение обеспечивает высокую стойкость к вибрациям отражателя с магнитной подвеской до 10g (g - ускорение силы тяжести).
Кроме того, настоящее изобретение позволяет снизить энергопотребление.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные детали и преимущества изобретения описаны ниже со ссылкой на приложенные чертежи:
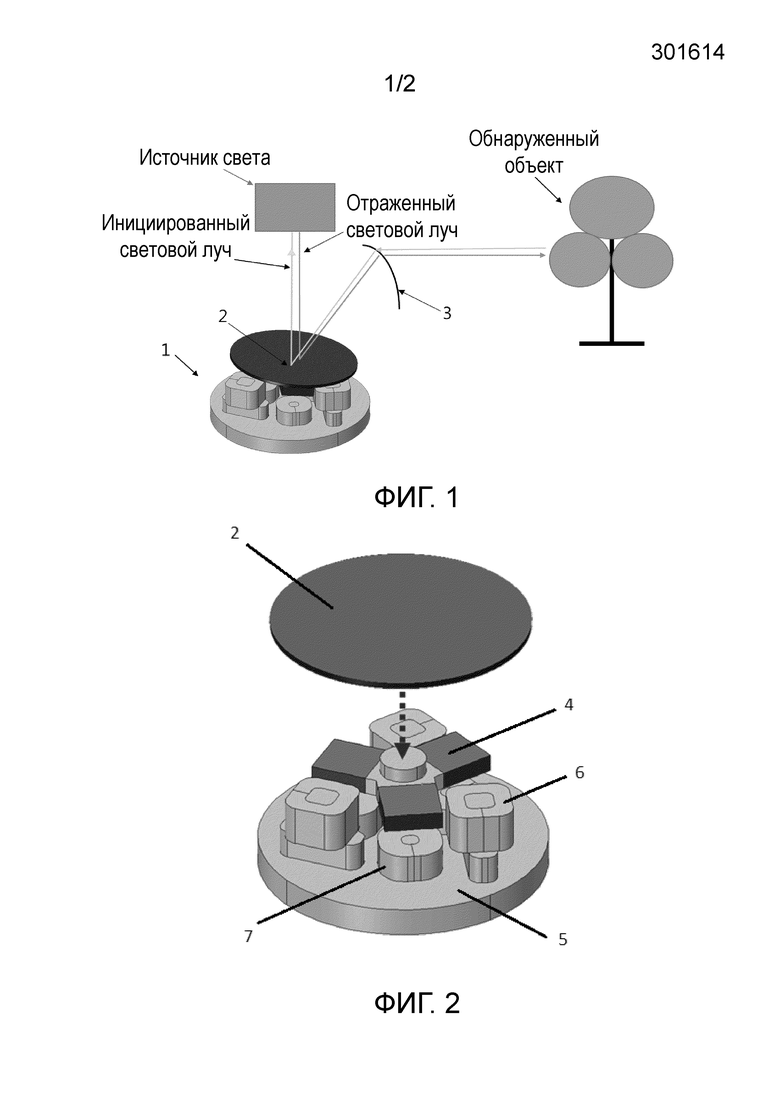
Фиг. 1 показывает общую схему 3D-сканирования.
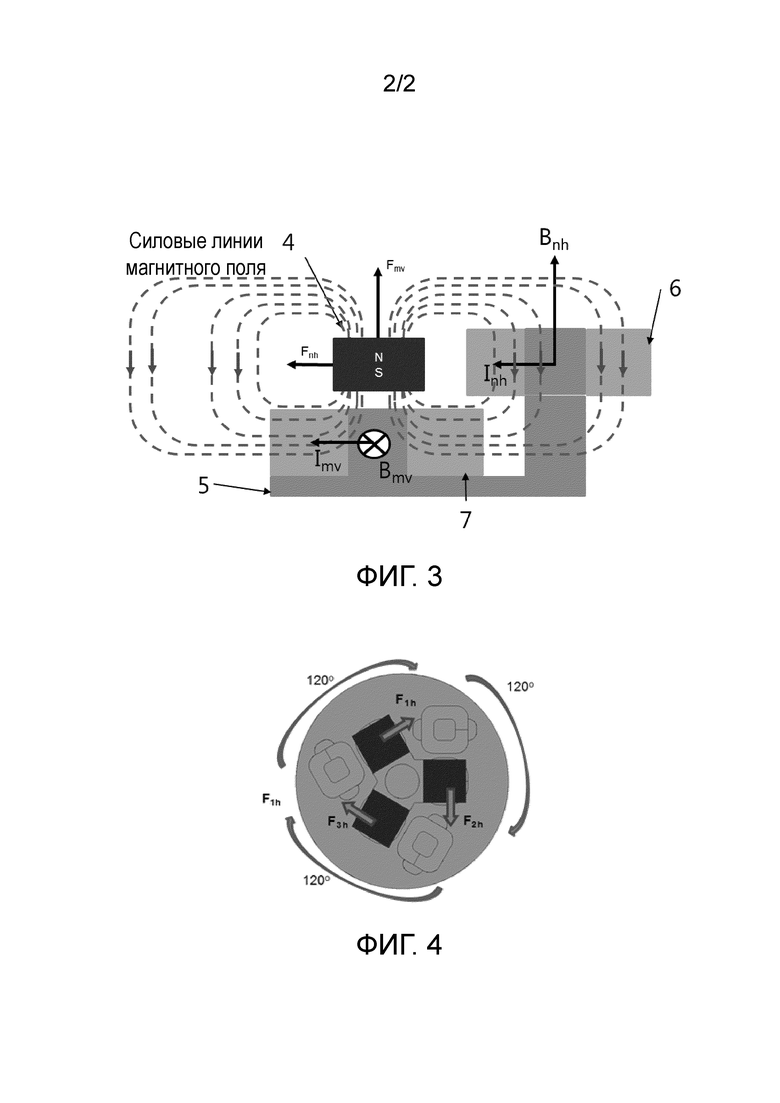
Фиг. 2 показывает 3D-модель системы отклонения луча.
Фиг. 3 показывает вид сбоку в поперечном сечении схемы подвески и стабилизации.
Фиг. 4 показывает вид сверху схемы стабилизации в горизонтальном направлении.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления изобретения не ограничены теми, которые описаны ниже. Другие варианты осуществления изобретения, не отклоняющиеся от сущности и объема изобретения, будут очевидны специалистам в данной области техники на основе информации, содержащейся в описании, и знаний из предшествующего уровня техники.
Фиг. 1 показывает общую схему 3D-сканирования с использованием отражателя с магнитной подвеской в лидаре. Источник света излучает световой луч, который отражается отражателем (2) в различных направлениях в соответствии с наклоном отражателя. Наклон отражателя (или положение в свободном пространстве) управляется системой (1) отклонения луча. В соответствии с одним вариантом осуществления полусферическая линза (3) может быть использована для перенаправления светового луча в вертикальной плоскости, тем самым обеспечивая увеличение поля зрения сканирования в вертикальном направлении. Луч, отраженный от объекта, возвращается к системе лидара, где он обнаруживается приемником.
В одном варианте осуществления приемник расположен в непосредственной близости от источника света. Альтернативно, источник света и приемник могут быть встроены в один блок.
В соответствии с одним вариантом осуществления в качестве источника света используется лазер. В соответствии с альтернативным вариантом осуществления в качестве источника света может быть использован LED. Следует отметить, что другие подходящие источники света также могут использоваться в настоящем изобретении в зависимости от требуемых характеристик света.
В одном варианте осуществления в качестве приемника используется лавинный фотодиод.
Отражатель с магнитной подвеской согласно настоящему изобретению обеспечивает возможность управления положением упомянутого отражателя по 6 степеням свободы .
Верхняя сторона отражателя с магнитной подвеской покрыта материалом, который может отражать световой луч.
Фиг. 2 показывает 3D-модель системы (1) отклонения луча в соответствии с одним аспектом настоящего изобретения. Заявленная система (1) содержит основание (5), постоянные магниты (4), отражатель (2) с магнитной подвеской, прикрепленный к постоянным магнитам (4), и катушки (6, 7) управления, установленные на основании (5).
Отражатель с магнитной подвеской может быть прикреплен к постоянным магнитам посредством несущего элемента для постоянных магнитов. Пунктирная линия со стрелкой на фиг. 2 указывает такое прикрепление отражателя с магнитной подвеской к несущему элементу для постоянных магнитов, причем отражатель с магнитной подвеской жестко прикреплен к упомянутому несущему элементу. Такое прикрепление может быть реализовано с помощью приклеивания, резьбового соединения или другого подходящего способа прикрепления.
Несущий элемент для постоянных магнитов должен быть выполнен из парамагнитного материала.
Верхняя сторона отражателя (2) с магнитной подвеской покрыта материалом, который может отражать световой луч. Например, упомянутый материал может быть одним из серебра, анодированного алюминия или другого подходящего материала.
Положение каждого постоянного магнита (4) в пространстве определяется электромагнитным взаимодействием между магнитом (4) и катушками (6, 7) управления, на которые подается ток. Катушки (6, 7) управления содержат катушки (6) управления по горизонтали, определяющие положение отражателя (2) с магнитной подвеской в горизонтальном направлении, и катушки (7) управления по вертикали, определяющие положение отражателя (2) с магнитной подвеской в вертикальном направлении.
Примерный вариант осуществления настоящего изобретения содержит три постоянных магнита. Три - это минимальное число магнитов, требуемых для работы системы. Однако следует отметить, что различные подходящие количества постоянных магнитов могут быть использованы в настоящей системе в зависимости от конкретной реализации настоящего изобретения. Максимальное число постоянных магнитов ограничено размерами системы и системными требованиями.
Кроме того, в одном варианте осуществления, основание представляет собой алюминиевое основание. Альтернативно, основание может быть выполнено из магния. Следует отметить, что основание из любого подходящего парамагнитного материала может быть использовано в настоящем изобретении в зависимости от конструктивных (вес, прочность и т.д.) и экономических требований.
Фиг. 3 показывает вид сбоку в поперечном сечении схемы подвески и стабилизации. Катушки (6) управления по горизонтали и катушки (7) управления по вертикали, в зависимости от поданного постоянного тока Inh (для катушки управления по горизонтали) и Imv (для катушки управления по вертикали), могут увеличивать или уменьшать силы Fnh и Fmv соответствующим образом и определять положение магнита (4) в горизонтальном и вертикальном направлении, причем n изменяется от 1 до N, где N является числом катушек управления по горизонтали, и m изменяется от 1 до M, где M является числом катушек управления по вертикали. Как показано на фиг. 3, в соответствии с правилом буравчика, катушка (7) управления по вертикали при ее питании постоянным током оказывает влияние на магнит (4) в вертикальном направлении, и катушка (6) управления по горизонтали при ее питании постоянным током оказывает влияние на магнит (4) в горизонтальном направлении, вследствие взаимодействия магнитных полей магнита (4) и катушек управления.
В вертикальном направлении положение магнита определяется векторной суммой силы Fmv и силы тяжести, приложенной к магниту. Поскольку сила Fmv пропорциональна току соответствующей катушки управления по вертикали и обратно пропорциональна расстоянию между постоянным магнитом и катушкой, увеличение или уменьшение тока приводит к перемещению постоянного магнита относительно катушки управления по вертикали. Увеличение тока приводит перемещению магнита в направлении от катушки управления по вертикали, а уменьшение тока приводит к перемещению магнита в направлении к катушке управления по вертикали. Когда магнит поднимается, ток катушки управления по вертикали должен быть увеличен, чтобы поддерживать магнит в поднятом положении.
Можно установить угол наклона отражателя в любом направлении путем управления высотой трех точек отражателя. Максимальный угол наклона определяется конструкцией системы и требованиями питания.
В горизонтальном направлении положение магнита определяется взаимной компенсацией сил Fnh, распределенных вдоль поперечного сечения катушек управления по горизонтали, и их моментов.
Силы F1h, F2h, F3h иллюстративно показаны на фиг. 4 как имеющие направление по часовой стрелке для иллюстрации принципа взаимодействия между постоянными магнитами и катушками управления по горизонтали. Однако очевидно, что упомянутые силы могут быть направлены в различных направлениях и иметь различные значения в зависимости от токов, поданных в катушки управления, взаимодействующие с постоянными магнитами, чтобы компенсировать упомянутые силы и их моменты.
Таким образом, положение и угол наклона отражателя с магнитной подвеской определяется путем управления током, подаваемым в катушки управления.
Катушки управления возбуждаются постоянным током. В случае прерывания тока, подаваемого в катушки управления, отражатель с магнитной подвеской будет опускаться на катушки, установленные на основании, под действием силы тяжести. В соответствии с одним вариантом осуществления отражатель с магнитной подвеской может опускаться на специальную(ые) опору(ы) (не показано), предусмотренную(ые) на основании. В случае восстановления подачи тока в катушки управления, отражатель с магнитной подвеской будет вновь левитировать.
Направление силы Fnh определяется по правилу правой руки с векторами Bnh и Inh, где Bnh является вектором магнитного поля n-ой катушки управления по горизонтали.
Направление силы Fmv определяется по правилу правой руки с векторами Bmv и Imv, где Bmv является вектором магнитного поля m-ой катушки управления по вертикали.
В вертикальном направлении, Fmv уравновешивается силой тяжести. В настоящем варианте осуществления система в горизонтальном направлении уравновешивается взаимной компенсацией сил F1h, F2h, F3h и их моментов (как показано на фиг. 4).
В соответствии с другим аспектом настоящего изобретения предложена система сканирования. Система сканирования содержит: вышеупомянутую систему отклонения луча; источник света, выполненный с возможностью излучать световой луч в направлении отражателя; и приемник, выполненный с возможностью принимать отраженный луч от отражателя.
Настоящее изобретение не предусматривает никакого механического контакта отражателя с другими элементами системы ввиду использования магнитной подвески. Кроме того, обеспечивается возможность 2D сканирования с использованием 1 (единственного) канала, содержащего один источник и один приемник.
В настоящем изобретении управление сканированием в горизонтальной и вертикальной плоскости обеспечивается за счет управления углом наклона отражателя. Углом наклона отражателя можно управлять путем управления токами в различных катушках управления. Чем меньше ток катушки управления по вертикали, тем меньше угол наклона (отклонение от горизонтальной плоскости) отражателя вблизи упомянутой катушки управления, и наоборот. Поэтому имеется возможность устанавливать любой угол наклона отражателя вблизи трех катушек управления по вертикали путем управления различными значениями тока упомянутых катушек управления. Таким образом, обеспечивается требуемое положение в пространстве. Уравновешивание системы в горизонтальной плоскости обеспечивается посредством катушек управления по горизонтали. Непрерывное управление наклоном отражателя позволяет осуществлять поворот светового луча в горизонтальной плоскости. Таким образом, можно сканировать только угловой сектор и управлять его шириной. Угловое разрешение в вертикальной плоскости определяется током, подаваемым в катушки управления.
В соответствии с другим аспектом настоящего изобретения предложена система лидара. Система лидара содержит вышеупомянутую систему сканирования и блок обработки, выполненный с возможностью анализировать результаты работы системы сканирования для обнаружения объектов и оценивания расстояния до упомянутых обнаруженных объектов.
В частности, система лидара оценивает временной интервал от времени излучения до времени приема луча и вычисляет расстояние до упомянутого обнаруженного объекта на основе результата упомянутой оценки.
Вышеупомянутая система лидара выполняет способ обнаружения объекта и измерения расстояния до упомянутого объекта, причем способ содержит этапы: излучения источником света светового луча к отражателю; определение направления светового луча путем управления углом наклона отражателя; прием луча, отраженного от объекта; оценку временного интервала от излучения до приема луча и вычисление расстояния до упомянутого объекта на основе результата упомянутой оценки.
Настоящее изобретение может использоваться для обнаружения объектов (препятствий и движущихся автомобилей) при управлении транспортным средством. Настоящее изобретение может быть наиболее предпочтительным для использования в автономных транспортных средствах. Кроме того, заявленная система может быть использована в навигации на основе карт 3D-сканирования для управления обслуживающими роботами.
Элементы, упоминаемые в настоящем документе в единственном числе, не исключают их множества, если только не определено иное. Несмотря на тот факт, что примерные варианты осуществления были описаны детально и показаны на приложенных чертежах, должно быть понятно, что эти варианты осуществления являются только иллюстративными и не предназначены для ограничения более широко охарактеризованного изобретения, и что изобретение не должно ограничиваться конкретными проиллюстрированными и описанными конфигурациями и структурами, поскольку различные другие модификации могут быть очевидны специалистам в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
| ДОПЛЕРОВСКИЙ СКАНИРУЮЩИЙ ЛИДАР БОРТОВОГО БАЗИРОВАНИЯ | 2017 |
|
RU2655040C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК | 2014 |
|
RU2556289C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| УСТРОЙСТВО И СПОСОБ ВОЗДЕЙСТВИЯ НА МАГНИТНЫЕ ЧАСТИЦЫ И/ИЛИ ИХ ОБНАРУЖЕНИЯ В ПОЛЕ ЗРЕНИЯ С ИСПОЛЬЗОВАНИЕМ МАТРИЦЫ НАБОРОВ ОДНОСТОРОННИХ ПЕРЕДАЮЩИХСЯ КАТУШЕК | 2011 |
|
RU2556967C2 |
| ТЕРМОМЕТРИЯ MRI, ОБЪЕДИНЕННАЯ С УСТРОЙСТВОМ ГИПЕРПОЛЯРИЗАЦИИ, ИСПОЛЬЗУЮЩИМ ФОТОНЫ С ОРБИТАЛЬНЫМ УГЛОВЫМ МОМЕНТОМ | 2010 |
|
RU2531129C2 |
| МАГНИТОРЕЗОНАНСНАЯ ТОМОГРАФИЯ С ИСПОЛЬЗОВАНИЕМ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ИМПУЛЬСОВ С НУЛЕВЫМ ВРЕМЕНЕМ ЭХО | 2014 |
|
RU2660401C1 |
Изобретение относится к области оптического приборостроения и касается системы отклонения луча. Система включает в себя основание, постоянные магниты, отражатель с магнитной подвеской, прикрепленный к постоянным магнитам, и катушки управления, установленные на основании. Отражатель с магнитной подвеской выполнен с возможностью левитировать вследствие электромагнитного взаимодействия постоянных магнитов и катушек управления. Катушки управления содержат катушки управления по горизонтали, определяющие положение отражателя с магнитной подвеской в горизонтальном направлении, и катушки управления по вертикали, определяющие положение отражателя с магнитной подвеской в вертикальном направлении. Технический результат заключается в упрощении конструкции и повышении надежности устройста. 4 н. и 3 з.п. ф-лы, 4 ил.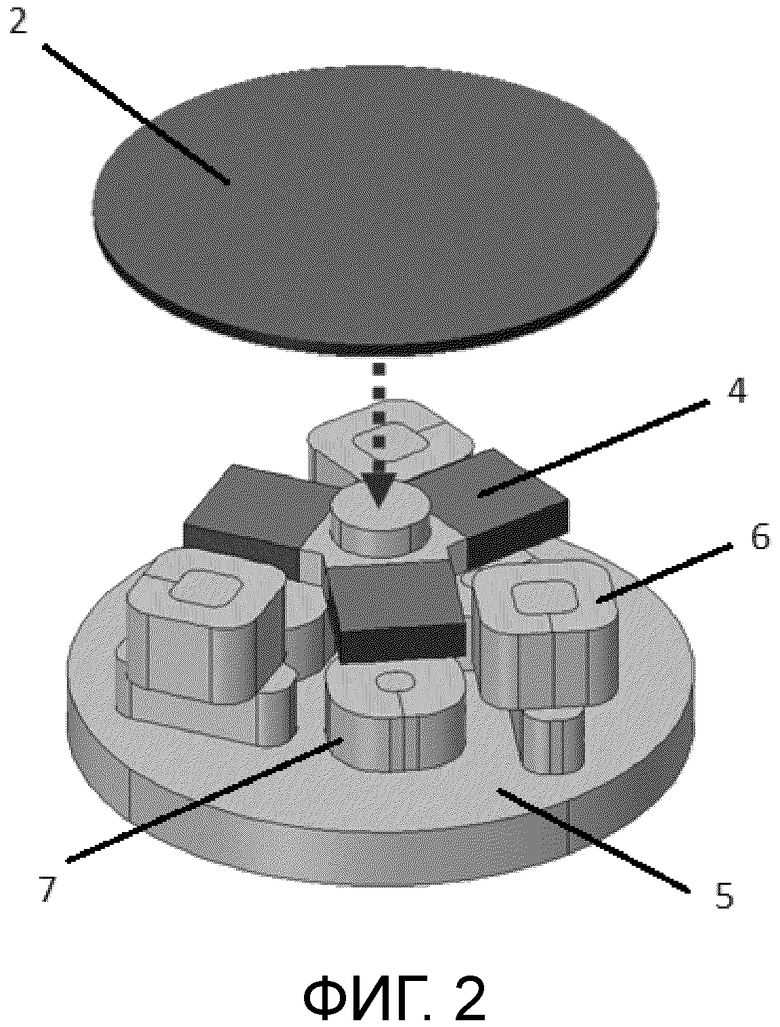
1. Система отклонения луча, содержащая:
- основание;
- постоянные магниты;
- отражатель с магнитной подвеской, прикрепленный к постоянным магнитам, и
- катушки управления, установленные на основании,
при этом отражатель с магнитной подвеской выполнен с возможностью левитировать вследствие электромагнитного взаимодействия постоянных магнитов и катушек управления,
при этом катушки управления содержат катушки управления по горизонтали, определяющие положение отражателя с магнитной подвеской в горизонтальном направлении, и катушки управления по вертикали, определяющие положение отражателя с магнитной подвеской в вертикальном направлении.
2. Система сканирования, содержащая:
- систему отклонения луча по п. 1;
- источник света, выполненный с возможностью излучать световой луч в направлении к отражателю; и
- приемник, выполненный с возможностью принимать световой луч, отраженный от объекта.
3. Система сканирования по п. 2, в которой источник света представляет собой лазер.
4. Система сканирования по п. 2, в которой источник света представляет собой светоизлучающий диод.
5. Система сканирования по любому из пп. 2-4, дополнительно содержащая полусферическую линзу для увеличения поля зрения сканирования.
6. Система лидара, содержащая систему сканирования по любому из пп. 2-5 и блок обработки, выполненный с возможностью анализировать результаты работы системы сканирования для обнаружения объектов и оценивания расстояния до упомянутых обнаруженных объектов.
7. Способ обнаружения объекта и измерения расстояния до упомянутого объекта с использованием системы лидара по п. 6, причем способ содержит этапы:
- излучения источником света светового луча к отражателю с магнитной подвеской;
- определения направления светового луча путем управления положением и углом наклона отражателя;
- приема луча, отраженного объектом;
- оценки временного интервала от времени излучения до времени приема луча и вычисления расстояния до упомянутого объекта на основе результата упомянутой оценки.
| US 5455706 A1, 10.1995 | |||
| US 5267091 A1, 30.11.1993 | |||
| US 2014021324 A1, 23.01.2014 | |||
| JP 2012068309 A, 05.04.2012. |

