ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет по предварительной патентной заявке США №62/936,065, поданной 15 ноября 2019 г. и озаглавленной «ПОРТАТИВНАЯ СИСТЕМА ПОСАДКИ ПО ПРИБОРАМ», описание которой полностью включено в настоящую заявку путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение в целом относится к системам аэронавигационных средств и к системам наблюдения за летательным аппаратом, включая системы посадки по приборам (instrument landing system, ILS) и, в частности, к портативным системам посадки по приборам (portable instrument landing system, PILS). Настоящее изобретение также в целом относится к управлению радиочастотными (РЧ) сигналами, переданными системами аэронавигационных средств и системами наблюдения за летательным аппаратом.
УРОВЕНЬ ТЕХНИКИ
[0003] Развертываемые системы ILS (D-ILS) включают традиционную ILS, которую можно сделать мобильной, развернуть и проверить при полете в течение 5-7 дней. Это решение идеально подходит для обустройства взлетно-посадочных полос при аварийном восстановлении и для временного базирования военных. В настоящее время эти системы находятся в производстве и обеспечивают военным жизнеспособное решение для точного захода на посадку военных самолетов, использующих традиционные системы ILS.
[0004] Между тем, задача эволюционировала, и тактические системы теперь требуют гораздо меньшего пространства для транспортировки и очень гибких возможностей развертывания. Некоторые решения включают новую авионику, что нежелательно, поскольку некоторые существующие летательные аппараты не могут поддерживать связь с этими системами. Другие решения включают системы посадки с приемоответчиком (Transponder Landing System, TLS). Хотя решение TLS теоретически обещает меньшую занимаемую площадь по сравнению с традиционным D-ILS, оно имеет серьезные эксплуатационные ограничения и риски, аналогичные посадочному радиолокатору, или радиолокатору точного захода на посадку (Precision Approach Radar, PAR). TLS требует активной связи летательного аппарата со службой управления воздушным движением. В неблагоприятных условиях это означает, что летательный аппарат должен широковещательно передавать радиочастоты. Даже при использовании приемоответчиков Mode-5 это потенциально подвергает малозаметный летательный аппарат риску обнаружения посредством пассивного обнаружения. TLS также ограничивает количество одновременно подлетающих летательных аппаратов. Наконец, требуется, чтобы пилоты были обучены и сертифицированы для этого нетрадиционного подхода, который, как и PAR, со временем приводит к значительным затратам.
[0005] Когда навигационное средство устанавливается или модифицируется, оно должно быть откалибровано с использованием бортового оборудования. Традиционно для этого нужен пилот/экипаж в летательном аппарате, а также техник на земле. Пилот/летный экипаж использует радиосвязь, чтобы сообщить о необходимых изменениях сигнала в пространстве наземному технику, который затем вручную изменяет параметры системы, чтобы изменения вступили в силу. Полетные проверки сложно запланировать, они требуют много времени, они дороги и опасны при выполнении в неблагоприятных условиях, например, при выполнении военных задач. Технику-человеку на земле, вносящему изменения в систему, может потребоваться несколько раз запустить некоторые диаграммы для проверки изменений, что продлит время полета. Регулировки, выполняемые человеком, могут быть некорректными, что может еще больше увеличить время полетной проверки. Таким образом, существующие процессы ручной настройки громоздки, потенциально подвержены ошибкам и опасны при выполнении в неблагоприятных условиях.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] В соответствии с вариантами осуществления составляющих изобретение концепций настоящего раскрытия описана портативная система посадки по приборам (PILS). PILS содержит множество антенных радиоблоков, и каждый антенный радиоблок выполнен с возможностью установки параметров передачи для элемента антенны. PILS также содержит глиссадный радиомаяк, содержащий антенную решетку без формирования изображения из элементов антенны, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков. Глиссадный радиомаяк выполнен с возможностью передачи соответствующим антенным радиоблокам, непосредственно связанным с каждым элементом антенны антенной решетки без формирования изображения, параметров передачи радиочастотных сигналов, которые генерируются соответствующими антенными радиоблоками, непосредственно связанными с каждым элементом антенны антенной решетки без формирования изображения. PILS также содержит курсовой радиомаяк, содержащий антенную решетку курсового радиомаяка из элементов антенны, причем каждый элемент антенны антенной решетки курсового радиомаяка непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков. Курсовой радиомаяк выполнен с возможностью передачи соответствующим антенным радиоблокам, непосредственно связанным с каждым элементом антенны антенной решетки курсового радиомаяка, параметров передачи радиочастотных сигналов, которые генерируются соответствующими антенными радиоблоками, непосредственно связанными с каждым элементом антенны антенной решетки без формирования изображения. PILS также содержит систему управления, выполненную с возможностью передачи курсовому радиомаяку или глиссадному радиомаяку данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи для радиочастотных сигналов, генерируемых множеством антенных радиоблоков.
[0007] В соответствии с вариантами осуществления также описан антенный радиоблок портативной системы посадки по приборам (PILS). Антенный радиоблок содержит схему передачи, которая выполнена с возможностью приема сообщения, содержащего параметры передачи для радиочастотного (РЧ) сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком. Схема передачи также выполнена с возможностью генерации РЧ-сигнала с использованием параметров передачи. Схема передачи также выполнена с возможностью передачи РЧ-сигнала с использованием элемента антенны, непосредственно связанного с антенным радиоблоком.
[0008] В соответствии с вариантами осуществления также описан глиссадный радиомаяк портативной системы посадки по приборам (PILS). Глиссадный радиомаяк содержит антенную решетку без формирования изображения, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS. Глиссадный радиомаяк также содержит схему обработки, связанную с каждым соответствующим антенным радиоблоком, непосредственно связанным с соответствующим элементом антенны антенной решетки без формирования изображения. Схема обработки выполнена с возможностью приема приема от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков. Схема обработки также выполнена с возможностью формирования параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки без формирования изображения, на основе принятых данных. Схема обработки также выполнена с возможностью передачи параметров передачи в антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения.
[0009] В соответствии с вариантами осуществления также описан курсовой радиомаяк портативной системы посадки по приборам (PILS). Курсовой радиомаяк содержит антенную решетку, причем каждый элемент антенны антенной решетки непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS. Курсовой радиомаяк также содержит схему обработки, связанную с каждым соответствующим антенным радиоблоком, непосредственно связанным с соответствующим элементом антенны антенной решетки. Схема обработки выполнена с возможностью приема от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых каждым соответствующим антенным радиоблоком PILS. Схема обработки также выполнена с возможностью формирования параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки, на основе принятых данных. Схема обработки также выполнена с возможностью передачи параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки.
[0010] В соответствии с вариантами осуществления описан способ, выполняемый антенным радиоблоком портативной системы посадки по приборам (PILS). Способ включает прием сообщения, содержащего параметры передачи для РЧ-сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком. Способ также включает генерирование РЧ-сигнала с использованием параметров передачи. Способ также включает передачу РЧ-сигнала с использованием элемента антенны, непосредственно связанного с антенным радиоблоком.
[0011] В соответствии с вариантами осуществления описан способ, выполняемый посредством глиссадного радиомаяка портативной системы посадки по приборам (PILS). Глиссадный радиомаяк содержит антенную решетку без формирования изображения, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS. Способ включает прием от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых каждым соответствующим антенным радиоблоком PILS. Способ также включает формирование параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки без формирования изображения, на основе принятых данных. Способ также включает передачу параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения.
[0012] В соответствии с вариантами осуществления описан способ, выполняемый курсовым радиомаяком портативной системы посадки по приборам (PILS). Курсовой радиомаяк содержит антенную решетку, причем каждый элемент антенны антенной решетки непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS. Способ включает прием от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков PILS. Способ также включает формирование параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки, на основе принятых данных. Способ также включает передачу параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки.
[0013] В соответствии с некоторыми другими вариантами осуществления также описана система управления портативной системой посадки по приборам (PILS). Система управления содержит приемопередатчик, выполненный с возможностью связи с системой беспилотного летательного аппарата. Система управления также содержит процессор и память, причем память содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором приема, от системы беспилотного летательного аппарата с использованием приемопередатчика, данных измерений, связанных с первыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS. Память также содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором генерации данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи, используемых антенными радиоблоками PILS, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения. Память также содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором передачи курсовому радиомаяку или глиссадному радиомаяку данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи.
[0014] В соответствии с некоторыми другими вариантами осуществления описан способ, выполняемый системой управления портативной системы посадки по приборам (PILS). Способ включает прием, от системы беспилотного летательного аппарата с использованием приемопередатчика системы управления, данных измерений, связанных с первыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS. Способ также включает генерацию данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи, используемых антенными радиоблоками PILS, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения. Способ также включает передачу курсовому радиомаяку или глиссадному радиомаяку данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи.
[0015] Как описано в настоящем документе, портативное решение ILS (PILS) включает легкий малопотребляющий курсовой радиомаяк, использующий приемопередатчик программно-определяемой радиосвязи (Software Defined Radio, SDR). SDR обеспечивает динамическую гибкость в небольшом корпусе, что позволяет реализовать характеристики традиционных антенных решеток за счет распределенной архитектуры, позволяющей управлять настройкой отдельных элементов антенны.
[0016] PILS также использует адаптивную сеть формирования луча наземных антенн, чтобы обеспечить обычный глиссадный радиомаяк ILS. Электроника глиссадного радиомаяка будет включать идентичные, проверенные в полевых условиях монтируемые блоки приемопередатчика, используемые для курсового радиомаяка. Устраняя традиционную мачту глиссадного радиомаяка и сложности, связанные с установкой, регулировкой и калибровкой, а также ограничения по топографии аэродрома, возможно предоставить систему, которая намного быстрее развертывается, намного компактнее при транспортировке и подходит для эксплуатации в самых сложных условиях аэродромного рельефа.
[0017] Все решение можно будет развернуть менее чем за 2 часа силами 2 человек. В рамках проектировочного эксперимента заявитель разработает механическую упаковку этих проверенных на практике технологий и продемонстрирует, что решение можно хранить на одной позиции поддона объемом 463 л. Чтобы обеспечить двухчасовое время установки, заявитель будет использовать уже ведущиеся исследования и разработки по использованию дронов для калибровки сигнала ILS в пространстве перед полетной проверкой. Для приложения PILS или приложения по возможности точного захода на посадку с малым радиусом действия (Small Footprint Precision Approach Landing Capability, SF-PALC) необходимо разработать и протестировать решение для локализации дронов в средах, где отсутствует GPS. Наконец, использование дрона калибровки будет расширено до настройки и калибровки сигнала ILS в пространстве в реальном времени. Учитывая полностью цифровую, адаптивную конструкцию, обратная связь в режиме реального времени от дрона в нескольких местоположениях и на разных высотах позволит быстро настроить сигналы курсового радиомаяка и глиссадного радиомаяка в пространстве, чтобы устранить отражения и развертывание, характерные для конкретной площадки.
[0018] В соответствии с некоторыми вариантами осуществления описан способ, выполняемый системой управления, сообщающейся с одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Способ включает получение данных измерений, связанных с РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, от беспилотного летательного аппарата (БПЛА), сообщающего эти данные измерений. Способ также включает определение, указывают ли данные измерений, что РЧ-сигналы находятся в диапазоне значений, основанном на местоположении БПЛА в воздушном пространстве, ближайшем к указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Способ также включает управление РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основании данных измерений и местоположения БПЛА.
[0019] В соответствии с некоторыми вариантами осуществления описана система управления, сообщающаяся с одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Система управления содержит процессор и память, содержащую исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором операций, включающих получение данных измерений, связанных с РЧ-сигналами, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, от беспилотного летательного аппарата (БПЛА), сообщающего эти данные измерений. Память также содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором операций, включающих определение, указывают ли данные измерений, что РЧ-сигналы находятся в диапазоне значений, основанном на местоположении БПЛА в воздушном пространстве, ближайшем к указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Память также содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором операций, включающих управление РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основании данных измерений и местоположения БПЛА.
[0020] В соответствии с некоторыми вариантами осуществления описан компьютерный программный продукт, включенный в некратковременный компьютерочитаемый носитель. Компьютерный программный продукт содержит исполняемые инструкции, которые при их исполнении процессором системы управления, сообщающейся с одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, вызывают выполнение системой управления операций различных способов, описанных в настоящем документе.
[0021] Другие цели, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания. Однако следует понимать, что подробное описание в разделе "Осуществление изобретения" и конкретные примеры, указывающие на предпочтительные варианты осуществления изобретения, даны только в качестве иллюстрации, поскольку специалистам в данной области будут очевидны различные изменения и модификации в пределах объема и сущности изобретения в данной области техники из этого подробного описания в разделе "Осуществление изобретения".
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] Прилагаемые чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют один или более приведенных для примера аспектов изобретения и вместе с подробным описанием в разделе "Осуществление изобретения" служат для пояснения их принципов и реализаций.
[0023] Фиг. 1 представляет собой блочную схему, иллюстрирующую приведенную для примера портативную систему посадки по приборам (PILS) в соответствии с вариантами осуществления настоящего раскрытия.
[0024] Фиг. 2 представляет собой блочную схему, иллюстрирующую приведенную для примера антенный радиоблок в соответствии с вариантами осуществления настоящего раскрытия.
[0025] Фиг. 3 представляет собой блок-схему, иллюстрирующую способ, выполняемый антенным радиоблоком портативной системы посадки по приборам (PILS) в соответствии с вариантами осуществления настоящего раскрытия.
[0026] Фиг. 4 представляет собой блочную схему, иллюстрирующую пример курсового радиомаяка PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0027] Фиг. 5 представляет собой блок-схему, иллюстрирующую способ, выполняемый курсовым радиомаяком портативной системы посадки по приборам (PILS) в соответствии с вариантами осуществления настоящего раскрытия.
[0028] Фиг. 6 представляет собой диаграмму, иллюстрирующую пример стационарно-установленной 8-элементной решетки курсового радиомаяка, состоящей из ряда элементов антенны, известных в данной области техники.
[0029] Фиг. 7 представляет собой диаграмму, иллюстрирующую приведенную для примера сдвоенную дипольную антенну в качестве приведенного для примера элемента антенны антенной решетки курсового радиомаяка PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0030] Фиг. 8 представляет собой график, иллюстрирующий приведенную для примера зависимость относительной мощности от угла азимута для сигнала курса плюс боковой полосы (CSB) и сигнала только боковой полосы (SBO), излучаемых 8-элементной решеткой в соответствии с вариантами осуществления настоящего раскрытия.
[0031] Фиг. 9 представляет собой график, иллюстрирующий приведенную для примера разницу в глубине модуляции (DDM) в одном и том же диапазоне угла азимута в соответствии с вариантами осуществления настоящего раскрытия.
[0032] Фиг. 10 представляет собой блочную схему примера глиссадного радиомаяка портативной системы посадки по приборам (PILS) в соответствии с вариантами осуществления настоящего раскрытия.
[0033] Фиг. 11 представляет собой диаграмму, иллюстрирующую различия между известными антенными решетками сформированием изображения и примером антенной решетки без формирования изображения для PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0034] Фиг. 12 представляет собой диаграмму, иллюстрирующую приведенные для примера элементы антенны LPD решетки без формирования изображения в соответствии с вариантами осуществления настоящего раскрытия.
[0035] Фиг. 13 представляет собой график сигнала, иллюстрирующий экспериментальные результаты вертикальной диаграммы направленности элемента антенны глиссадного радиомаяка антенной решетки без формирования изображения, измеренной в камере.
[0036] Фиг. 14 представляет собой график, иллюстрирующий приведенные для примера диаграммы несущей плюс боковой полосы (CSB) и только боковой полосы (SBO) для системы глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0037] Фиг. 15 представляет собой график, иллюстрирующий приведенную для примера диаграмму DDM для системы глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0038] Фиг. 16 представляет собой график, иллюстрирующий приведенную для примера диаграмму направленности CSB и SBO вертикальной диаграммы направленности элемента антенны глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0039] Фиг. 17 представляет собой график, иллюстрирующий приведенную для примера диаграмму направленности CSB и SBO двухэлементной нулевой эталонной решетки глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0040] Фиг. 18 представляет собой график, иллюстрирующий приведенную для примера диаграмму DDM четырехэлементной горизонтальной нулевой эталонной решетки глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0041] Фиг. 19 представляет собой блок-схему, иллюстрирующую способ, выполняемый глиссадным радиомаяком портативной системы посадки по приборам (PILS) в соответствии с вариантами осуществления настоящего раскрытия.
[0042] Фиг. 20 представляет собой блочную схему, иллюстрирующую приведенную для примера архитектуру, которая выполняет сбор сигналов, цифровую обработку сигналов, преобразование сигналов и обнаружение аварийных состояний в соответствии с вариантами осуществления настоящего раскрытия.
[0043] Фиг. 21 представляет собой первый вид приведенного для примера упаковочного решения курсового радиомаяка системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0044] Фиг. 22 представляет собой второй вид приведенного для примера упаковочного решения курсового радиомаяка системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0045] Фиг. 23 представляет собой вид установленного распакованного курсового радиомаяка системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0046] Фиг. 24 представляет собой первый вид приведенного для примера упаковочного решения глиссадного радиомаяка системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0047] Фиг. 25 представляет собой второй вид приведенного для примера упаковочного решения глиссадного радиомаяка системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0048] Фиг. 26 представляет собой блочную схему, иллюстрирующую приведенную для примера систему выдачи команд и управления (CCS) системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0049] Фиг. 27 представляет собой блок-схему, иллюстрирующую способ, выполняемый системой выдачи команд и управления системы PILS в соответствии с вариантами осуществления настоящего раскрытия.
[0050] Фиг. 28 представляет собой блок-схему, иллюстрирующую способ определения, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений в соответствии с вариантами осуществления настоящего раскрытия.
[0051] Фиг. 29 представляет собой блок-схему, иллюстрирующую способ передачи данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания для курсового радиомаяка или глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0052] Фиг. 30 представляет собой блок-схему, иллюстрирующую способ определения местоположения системы беспилотного летательного аппарата в воздушном пространстве, ближайшем к взлетно-посадочной полосе в соответствии с вариантами осуществления настоящего раскрытия.
[0053] Фиг. 31 представляет собой блок-схему, иллюстрирующую способ передачи инструкции в систему беспилотного летательного аппарата переместиться в другое местоположение в воздушном пространстве в соответствии с вариантами осуществления настоящего раскрытия.
[0054] Фиг. 32 представляет собой блочную схему, иллюстрирующую первую приведенную для примера систему комплексной калибровки, выполняемой без участия человека, (end-to-end unmanned calibration system, E2EUC) в соответствии с вариантами осуществления настоящего раскрытия.
[0055] Фиг. 33 представляет собой блочную схему, иллюстрирующую вторую приведенную для примера систему комплексной калибровки, выполняемой без участия человека, (E2EUC) в соответствии с вариантами осуществления настоящего раскрытия.
[0056] Фиг. 34А-34С представляют собой блок-схемы, иллюстрирующие третью приведенную для примера систему комплексной калибровки, выполняемой без участия человека, (E2EUC) в соответствии с вариантами осуществления настоящего раскрытия.
[0057] Фиг. 35 представляет собой блочную схему, иллюстрирующую приведенную для примера структуру контура управления для настройки навигации с использованием контура обратной связи на основе дрона в соответствии с вариантами осуществления настоящего раскрытия.
[0058] Фиг. 36 представляет собой диаграмму вида сверху приведенного для примера захода на посадку с некоторыми опорными точками.
[0059] Фиг. 37 представляет собой график чувствительности смещения разницы в глубине модуляции (DDM) для курсового радиомаяка.
[0060] Фиг. 38 представляет собой диаграмму, иллюстрирующую приведенное для примера отклонение курса курсового радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0061] Фиг. 39 представляет собой график, иллюстрирующий приведенное для примера соотношение между отклонением курса курсового радиомаяка и длиной взлетно-посадочной полосы в соответствии с вариантами осуществления настоящего раскрытия.
[0062] Фиг. 40 представляет собой диаграмму, иллюстрирующую ширину сектора курса для курсового радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0063] Фиг. 41 представляет собой график, иллюстрирующий приведенное для примера соотношение между шириной сектора курса курсового радиомаяка и длиной взлетно-посадочной полосы в соответствии с вариантами осуществления настоящего раскрытия.
[0064] Фиг. 42 представляет собой диаграмму, иллюстрирующую приведенный для примера угол входа в глиссаду и отклонение.
[0065] Фиг. 43 представляет собой график, иллюстрирующий приведенное для примера соотношение между отклонением глиссады и углом глиссады в соответствии с вариантами осуществления настоящего раскрытия.
[0066] Фиг. 44 представляет собой диаграмму, иллюстрирующую приведенную для примера ширину сектора глиссады.
[0067] Фиг. 45 представляет собой график, иллюстрирующий приведенное для примера соотношение между отклонением ширины сектора глиссады и углом глиссады в соответствии с вариантами осуществления настоящего раскрытия.
[0068] Фиг. 46 представляет собой график, иллюстрирующий приведенное для примера соотношение между отклонением высоты и углом глиссады в соответствии с вариантами осуществления настоящего раскрытия.
[0069] Фиг. 47 представляет собой график, иллюстрирующий приведенное для примера соотношение между углом возвышения дрона и фиксированной дальностью и различными высотами в соответствии с вариантами осуществления настоящего раскрытия.
[0070] Фиг. 48 представляет собой график, иллюстрирующий приведенное для примера соотношение между углом возвышения дрона и дальностью до дрона при различных высотах дрона в соответствии с вариантами осуществления настоящего раскрытия.
[0071] Фиг. 49 представляет собой график, иллюстрирующий приведенную для примера диаграмму пересечения дрона для измерений курсового радиомаяка и глиссадного радиомаяка в соответствии с вариантами осуществления настоящего раскрытия.
[0072] Фиг. 50 представляет собой блочную схему, иллюстрирующую приведенную для примера систему централизованного управления в соответствии с вариантами осуществления настоящего раскрытия.
[0073] Фиг. 51 представляет собой блочную схему, иллюстрирующую систему управления, сообщающуюся с системой навигации летательного аппарата и с системой наблюдения за летательным аппаратом в соответствии с вариантами осуществления настоящего раскрытия.
[0074] Фиг. 52 представляет собой блок-схему, иллюстрирующую способ, выполняемый системой управления, в соответствии с вариантами осуществления настоящего раскрытия.
[0075] Фиг. 53 представляет собой блок-схему, иллюстрирующую способ определения, находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве, в соответствии с вариантами осуществления настоящего раскрытия.
[0076] Фиг. 54 представляет собой блок-схему, иллюстрирующую способ передачи инструкции сообщить данные измерений в БПЛА в соответствии с вариантами осуществления настоящего раскрытия.
[0077] Фиг. 55 представляет собой блок-схему способа передачи в БПЛА второй инструкции скорректировать фактическое положение БПЛА так, чтобы оно было в пределах заранее заданного порога, в соответствии с вариантами осуществления настоящего раскрытия.
[0078] Фиг. 56 представляет собой блок-схему способа передачи инструкции модифицировать параметры передачи, связанные с РЧ-сигналами, в указанную одну из системы навигации летательного аппарата и системы наблюдения за летательным аппаратом в соответствии с вариантами осуществления настоящего раскрытия.
[0079] Фиг. 57 представляет собой блок-схему способа определения, указывают ли обновленные данные измерений, что модифицированные РЧ-сигналы находятся в диапазоне значений, в соответствии с вариантами осуществления настоящего раскрытия.
[0080] Фиг. 58 представляет собой блок-схему способа передачи инструкции сообщить в БПЛА обновленные данные измерений в соответствии с вариантами осуществления настоящего раскрытия.
[0081] Фиг. 59 представляет собой блок-схему способа определения, указывают ли обновленные данные измерений, что модифицированный РЧ-сигнал, переданный только через элемент антенны антенной решетки, находится в диапазоне значений, в соответствии с вариантами осуществления настоящего раскрытия.
[0082] Фиг. 60 представляет собой блок-схему способа управления РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основании вторых данных измерений и второго местоположения БПЛА в воздушном пространстве, в соответствии с вариантами осуществления настоящего раскрытия.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0083] Настоящее изобретение будет более подробно описано ниже со ссылкой на прилагаемые чертежи, на которых показаны некоторые, но не все варианты осуществления раскрытого в настоящем документе объекта изобретения. Одинаковые обозначения относятся к одинаковым элементам по всему документу. Настоящее изобретение может быть реализовано во многих различных формах и не должно рассматриваться как ограниченное вариантами осуществления, изложенными в настоящем документе. Напротив, эти варианты осуществления предоставлены для того, чтобы это раскрытие удовлетворяло применяемым юридическим требованиям. Действительно, специалистам в данной области техники, к которой относится изобретение, очевидны многие модификации и другие варианты осуществления настоящего изобретения, раскрытого в настоящем документе, с учетом принципов, представленных в предшествующих описаниях и связанных с ними чертежах. Следовательно, следует понимать, что настоящее изобретение не должно ограничиваться конкретными раскрытыми вариантами осуществления, и что модификации и другие варианты осуществления предназначены для включения в объем прилагаемой формулы изобретения.
[0084] В соответствии с вариантами осуществления составляющих изобретение концепций настоящего раскрытия описана портативная система посадки по приборам (PILS). PILS включает множество антенных радиоблоков, причем каждый антенный радиоблок выполнен с возможностью генерирования РЧ-сигнала для передачи его элементом антенны, непосредственно связанным с антенным радиоблоком. PILS также включает глиссадный радиомаяк, содержащий антенную решетку без формирования изображения из элементов антенны, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков. Например, фиг. 1 иллюстрирует приведенную для примера PILS 100, которая включает множество антенных радиоблоков (не показаны), причем каждый антенный радиоблок выполнен с возможностью установки параметров передачи для элемента антенны. Приведенные для примера реализации антенных радиоблоков (antenna radio unit, ARU) описаны ниже. Фиг. 1 также иллюстрирует приведенный для примера глиссадный радиомаяк (glideslope, GS) 102 PILS, содержащий антенную решетку без формирования изображения из элементов А1-А4 антенны. Каждый элемент А1-А4 антенны на фиг. 1, непосредственно связан с соответствующим антенным радиоблоком (не показан) из множества антенных радиоблоков PILS 100.
[0085] Глиссадный радиомаяк PILS выполнен с возможностью передачи, в соответствующие антенные радиоблоки, непосредственно связанные с каждым элементом антенны антенной решетки без формирования изображения, параметров передачи РЧ-сигналов, генерируемых соответствующими антенными радиоблоками, непосредственно связанными с каждым элементом антенны антенной решетки без формирования изображения, согласно вариантам осуществления. Например, GS 102 может быть выполнен с возможностью передачи, в соответствующие антенные радиоблоки, непосредственно связанные с элементами А1-А4 антенны, параметров передачи РЧ-сигналов, генерируемых соответствующими антенными радиоблоками, непосредственно связанными с элементами А1-А4 антенны.
[0086] В соответствии с вариантами осуществления PILS также включает курсовой радиомаяк, содержащий антенную решетку курсового радиомаяка из элементов антенны, причем каждый элемент антенны антенной решетки курсового радиомаяка непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков. Фиг. 1 иллюстрирует приведенный для примера курсовой радиомаяк 104 PILS, содержащий антенную решетку курсового радиомаяка (не показана) из элементов антенны, причем каждый элемент антенны антенной решетки курсового радиомаяка непосредственно связан с соответствующим антенным радиоблоком (не показан) из множества антенных радиоблоков PILS 100. Приведенные для примера реализации антенной решетки курсового радиомаяка описаны ниже.
[0087] PILS также включает систему управления, выполненную с возможностью передачи в курсовой радиомаяк или в глиссадный радиомаяк данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков. В продолжении примера, фиг. 1 иллюстрирует, что PILS 100 включает систему выдачи команд и управления (CCS) 106 PILS, выполненную с возможностью передачи в курсовой радиомаяк 104 или в глиссадный радиомаяк 102 данных, используемых курсовым радиомаяком 104 или глиссадным радиомаяком 102 для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков (не показаны) PILS 100.
[0088] В некоторых вариантах осуществления параметры передачи содержат один или более из мощности, индексов модуляции и фазы РЧ-сигнала для передачи их через элемент антенны. В соответствии с некоторыми вариантами осуществления антенная решетка без формирования изображения выполнена с возможностью размещения параллельно взлетно-посадочной полосе. Например, фиг. 1 иллюстрирует элементы А1-А4 антенны, размещенные параллельно взлетно-посадочной полосе. В некоторых вариантах осуществления антенная решетка курсового радиомаяка выполнена с возможностью сворачивания и расширения. Примеры антенной решетки курсового радиомаяка более подробно описаны ниже со ссылкой на фиг. 23. В некоторых вариантах осуществления множество антенных радиоблоков, глиссадный радиомаяк, антенная решетка без формирования изображения, курсовой радиомаяк, антенная решетка курсового радиомаяка и система управления выполнены с возможностью транспортировки на грузовом поддоне перед развертыванием. Приведенные для примера конфигурации множества антенных радиоблоков, глиссадного радиомаяка, антенной решетки без формирования изображения, курсового радиомаяка, антенной решетки курсового радиомаяка и системы управления на грузовом поддоне перед развертыванием более подробно описаны ниже со ссылкой на фиг. 21, 22, 24 и 25.
[0089] Решение PILS стало возможным благодаря достижениям в области электронных технологий и новаторскому мышлению инженеров заявителя из разных дисциплин и областей. Решение обеспечивает обычный сигнал ILS в пространстве для приема всеми соответствующим образом оснащенными летательными аппаратами, но в значительно меньшем размере по сравнению с предыдущими обычными или развертываемыми решениями ILS.
[0090] Как показано на фиг. 1, решение PILS 100 состоит из подсистем курсового радиомаяка 104 и глиссадного радиомаяка (GS) 102 (также известной как глиссада), дополненных решением радиосвязи проверки полетов (Flight Check Radio, FCR) 108, и снабжено автоматизированным дроном 110 настройки (TD), который управляется подсистемой 106 выдачи команд и управления (CCS). Решение обеспечивает полное развертывание в двух местоположениях (LOC 104 и GS 102) для ускорения установки за счет совместного размещения функций FCR 108 и CCS 106 в местоположении GP 102. В альтернативной реализации функция CCS включает общее состояние работы ILS, она также предназначена для отделения от GP 102, если базовые операции лучше поддерживаются за счет совместного размещения с другим аэродромным оборудованием и персоналом. Например, фиг. 1 иллюстрирует CCS 112, сконфигурированную для удаленного расположения от GP 102.
[0091] Одним из ключевых достижений в технологии, которое делает такое решение возможным сегодня, является внедрение программно-определяемых (SDR) передатчиков/приемников или приемопередатчиков. SDR обеспечивает динамическую гибкость в малом корпусе, что позволяет реализовать характеристики некоторых традиционных антенных решеток и изобретательских антенных решеток, описанных в настоящем документе, посредством распределенной архитектуры, позволяющей управлять настройкой отдельных элементов антенны и контролировать характеристики посредством антенного радиоблока (ARU).
[0092] В соответствии с вариантами осуществления также описан антенный радиоблок портативной системы посадки по приборам (PILS). Например, фиг. 2 иллюстрирует приведенный для примера антенный радиоблок (ARU) 200, как описано выше со ссылкой на фиг. 1. Антенный радиоблок содержит схему передачи, которая выполнена с возможностью приема сообщения, содержащего параметры передачи для РЧ-сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком. Например, ARU 200 на фиг. 2 выполнена с возможностью приема от GS 102 или LOC 104 на фиг. 1 через порт 208 данных ТХ, сообщения, содержащего параметры передачи для РЧ-сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком, такого как один из элементов А1-А4 антенны, проиллюстрированных на фиг. 1.
[0093] Антенный радиоблок 200 может быть непосредственно связан с элементом антенны через два радиочастотных кабеля: один для передачи РЧ-сигнала через элемент антенны, а другой для приема переданного сигнала для его контроля. Никакие другие компоненты обработки сигналов не подключаются между антенным радиоблоком 200 и элементом антенны. ARU 200 может помещаться внутрь корпуса или упаковки, которая выполнена с возможностью прикрепления к конструкции, поддерживающей элемент антенны или конструкцию элемента антенны.
[0094] В одном варианте осуществления антенный радиоблок может принимать сообщение, содержащее параметры передачи для РЧ-сигнала, передаваемого от элемента антенны антенной решетки без формирования изображения, непосредственно связанного с антенным радиоблоком. Например, ARU 200 может принимать параметры передачи для РЧ-сигнала, передаваемого с использованием одного из элементов А1-А4 антенны, проиллюстрированных на фиг. 1, непосредственно связанного с ARU 200. В другом варианте осуществления антенный радиоблок может принимать сообщение, содержащее параметры передачи для РЧ-сигнала, передаваемого от элемента антенны антенной решетки курсового радиомаяка, непосредственно связанного с антенным радиоблоком. Например, ARU 200 может принимать параметры передачи для РЧ-сигнала, передаваемого с использованием одного из элементов антенны антенной решетки курсового радиомаяка 104, проиллюстрированного на фиг. 1, непосредственно связанного с ARU 200.
[0095] В соответствии с некоторыми вариантами осуществления схема передачи также выполнена с возможностью генерирования РЧ-сигнала с использованием параметров передачи. Например, схема 202 ТХ может быть выполнена с возможностью генерирования РЧ-сигнала с использованием параметров передачи, переданных GS 102 или LOC 104. Схема передачи также выполнена с возможностью передачи РЧ-сигнала с использованием элемента антенны, непосредственно связанного с антенным радиоблоком, в соответствии с некоторыми вариантами осуществления. В продолжение примера, схема 202 ТХ также может быть выполнена с возможностью передачи РЧ-сигнала к порту 204 РЧ-подачи одного из элементов антенны, непосредственно связанного с ARU 200, например, одного из элементов А1-А4 антенны.
[0096] В соответствии с вариантами осуществления антенный радиоблок также содержит схему приема, выполненную с возможностью приема РЧ-сигнала, переданного элементом антенны. Например, фиг. 2 иллюстрирует, что ARU 200 содержит схему 220 RX, выполненную с возможностью приема РЧ-сигнала из порта 206 контроля элемента антенны, непосредственно связанного с ARU 200, такого как один из элементов А1-А4 антенны. Схема приема также выполнена с возможностью формирования данных измерений на основании принятого РЧ-сигнала в соответствии с вариантами осуществления. В продолжение примера, схема 220 RX также выполнена с возможностью формирования данных измерений на основании принятого РЧ-сигнала. Схема приема также выполнена с возможностью передачи данных измерений в курсовой радиомаяк или в глиссадный радиомаяк PILS. Например, фиг. 2 иллюстрирует схему 220 RX, выполненную с возможностью передачи данных измерений в GS 102 или LOC 104 через порт 210 данных RX ARU 200.
[0097] Фиг. 3 иллюстрирует способ, выполняемый антенным радиоблоком портативной системы посадки по приборам (PILS) в соответствии с вариантами осуществления. Фиг. 3 иллюстрирует способ, включающий прием 300 сообщения, содержащего параметры передачи для РЧ-сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком. Фиг. 3 также иллюстрирует, что способ также включает генерацию 302 РЧ-сигнала с использованием параметров передачи. Способ также включает передачу 303 РЧ-сигнала с использованием элемента антенны, непосредственно связанного с антенным радиоблоком, как показано на фиг. 3. Способ также может включать прием параметров передачи от курсового радиомаяка или от глиссадного радиомаяка PILS. Способ также может включать прием РЧ-сигнала, переданного элементом антенны, генерирующим данные измерений, основанные на принятом РЧ-сигнале, и передачу данных измерений в курсовой радиомаяк или в глиссадный радиомаяк PILS.
[0098] Включение и применение ARU 200 в подсистемах курсового радиомаяка 104 и глиссадного радиомаяка 102 описано ниже. Контроль и управление, схема решения по электропитанию, удаленное техническое обслуживание и подход к удовлетворению требований FCR также описаны ниже.
[0099] Антенный радиоблок 200 отвечает за генерацию и измерение радиочастотного сигнала, излучаемого связанной с ним антенной. Все ARU в системе 100 PILS идентичны по HW/FW, но каждый ARU 200 будет вырабатывать отличающийся РЧ-сигнал в соответствии с конфигурацией, установленной блоком 404 цифровой обработки (DPU) (курсовой радиомаяк) или 1004 (глиссадный радиомаяк) (главным образом устанавливаются мощность, фаза и индексы модуляции). ARU 200 представляет собой маленькую коробку с двумя однонаправленными РЧ-портами 204, 206 (к антенне «feed» 204 и от антенны «mon» 206) и двумя двунаправленными портами 208, 210 данных (к и от DPU, один для секции RX 210, другой для секции 208 ТХ). Кабели данных каждого ARU сходятся к выделенным портам 404 (курсовой радиомаяк)/1004 (глиссадный радиомаяк) DPU, который управляет всеми ARU курсового радиомаяка и глиссадного радиомаяка, соответственно. Фиг. 2 иллюстрирует приведенную для примера функциональную блок-схему одного ARU 200. Фиг. 2 также иллюстрирует приведенную для примера верхнюю секцию ТХ, содержащую схему 202 ТХ, которая содержит:
• Блок 212 объединения/отделения, выполненный с возможностью:
- отделения из порта данных ТХ импульсов синхронизации и данных конфигурации; и
- объединения в порте данных ТХ возвращенной синхронизации и сообщений.
• Блок 214 синхронизации, который управляет импульсами синхронизации, создаваемыми DPU 404 или DPU 1004.
• Блок 216 генерации ТХ может содержать FPGA, который генерирует радиочастотный сигнал основной полосы, основанный на данных конфигурации (мощность, фаза, индексы модуляции…), установленных DPU 404 или DPU 1004.
• Блок 218 РЧ-цепи ТХ, который может содержать РЧ-цифро-аналоговый преобразователь, за которым следуют усилитель мощности и контур управления.
[00100] Нижняя секция RX содержит схему 220 RX, которая содержит:
• Блок 222 РЧ-цепи, который может содержать РЧ-аналого-цифровой преобразователь.
• Блок 224 измерения RX может содержать FPGA, который анализирует радиочастотный сигнал основной полосы и возвращает оценочные значения (ожидается, что они будут такими же, как данные конфигурации ТХ) в DPU 404 или DPU 1004.
• Блок 226 РЧ-синхронизации управляет импульсами синхронизации, создаваемыми центральным блоком 106.
• Блок 228 объединения/отделения выполненный с возможностью:
- отделения из порта данных RX импульсов синхронизации и сообщений; и
- объединения в порте данных RX возвращенной синхронизации и данных измерений.
[00101] Электропитание постоянным током для всего ARU может обеспечиваться от DPU 404 или 1004 через порт 210 данных RX ARU. Решение по электропитанию также включает логику приоритетов и последовательности для автоматического переключения с основного электропитания на вторичное электропитание (например, от генератора) при потере основного электропитания. Решение также включает возможность автоматического переключения обратно на основное электропитание после его восстановления. В дополнение к первичным и вторичным источникам электропитания переменного тока, решение по электропитанию PILS будет обеспечивать резервное питание от батареи, чтобы все компоненты навигации и связи оставались работоспособными во время помех по электропитанию или во время полного отключения внешнего электропитания. Размер резервной батареи будет обеспечивать достаточную работу от полного заряда, что соответствует стационарным навигационным решениям. Например, схема 230 обработки и управления питанием, показанная на фиг. 2 может быть выполнена с возможностью автоматического переключения с основного электропитания на вторичное электропитание (например, генератор) при потере основного электропитания и с возможностью обратного переключения на основное электропитание после его восстановления.
[00102] Что касается некоторых технологических аспектов, могут применяться следующие соображения (риск и возможности).
[00103] Поскольку РЧ-сигнал, подаваемый к каждой антенне, может быть индивидуально запрограммирован связанным с ней ARU 200, система 100 PILS имеет возможность создавать сигнал в пространстве с большей гибкостью, чем существующая система ILS, в которой диаграммы направленности решетки фиксированы. (Кроме того, процедура юстировки может быть полностью или частично основана на программном обеспечении, а не на обрезке РЧ-кабелей антенны).
[00104] Поскольку каждый ARU 200 способен индивидуально измерять РЧ-сигнал, излучаемый связанной с ним антенной, система 100 PILS имеет возможность оценивать сигнал в пространстве с большей гибкостью, чем существующая система ILS, в которой оценка выполняется при фиксированных углах.
[00105] Генерация и измерение РЧ-сигналов в ARU 200 могут выполняться с использованием технологии SDR. Сигнал, создаваемый каждым ARU 200 для PILS (сигналы LOC или GP), с предположением о единой частоте, определяется выражением:

[00106] По сути, несущая на частоте ГО (около 110 МГц для LOC и 330 МГц для GP) модулируется суммой низкочастотных сигналов fi (90 Гц, 150 Гц и 1020 Гц) с разными индексами модуляции, фазами и мощностью. Поскольку этот сигнал очень похож на сигнал доплеровского всенаправленного ОВЧ-радиомаяка (DVOR), его было довольно легко реализовать во время экспериментов, используя базовый 4-элементный курсовой радиомаяк и перепрограммируемую РЧ-плату, ранее предназначенную для DVOR (но с упрощением для управления четырьмя антеннами с одинаковым эталонным тактированием). Этот эксперимент продемонстрировал, что сигнал ILS можно легко генерировать посредством технологии SDR. Функция контроля в системе 100 PILS распределена между всеми ARU PILS 100 и центральным блоком 106.
[00107] В соответствии с вариантами осуществления также описан курсовой радиомаяк портативной системы посадки по приборам (PILS). Фиг. 4 иллюстрирует приведенный для примера курсовой радиомаяк 400 PILS 100. Курсовой радиомаяк содержит антенную решетку, причем каждый элемент антенны антенной решетки непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS, согласно вариантам осуществления. В продолжение примера, фиг. 4 иллюстрирует курсовой радиомаяк 400, содержащий антенную решетку 402, причем каждый элемент 402L..402R антенны антенной решетки 402 непосредственно связан с соответствующим ARU 4L…4R PILS 100. Курсовой радиомаяк также содержит схему обработки, связанную с каждым соответствующим антенным радиоблоком, непосредственно связанным с соответствующем элементом антенны антенной решетки. Например, фиг. 4 иллюстрирует курсовой радиомаяк 400, содержащий блок 404 цифровой обработки, связанный с ARU 402L…402R, непосредственно связанными с соответствующими элементами 402L…402R антенны антенной решетки 402.
[00108] Схема обработки выполнена с возможностью приема от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых каждым соответствующим антенным радиоблоком PILS, согласно вариантам осуществления. В продолжение предыдущего примера, фиг. 4 иллюстрирует блок 404 цифровой обработки, который может быть выполнен с возможностью приема от CCS 106 PILS 100 данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых ARU 4L-4R. Схема обработки также выполнена с возможностью формирования параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки, на основе принятых данных, согласно вариантам осуществления. Например, DPU 404, показанный на фиг. 4, может быть выполнен с возможностью формирования параметров передачи для РЧ-сигналов, передаваемых элементами 402L-402R антенны антенной решетки 402, на основе принятых данных. В соответствии с вариантами осуществления схема обработки также выполнена с возможностью передачи параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки. Фиг. 4 также иллюстрирует приведенный для примера DPU 404, который может быть выполнен с возможностью передачи параметров передачи в блоки ARU 4L и/или ARU 4R для генерирования РЧ-сигналов для передачи их через элементы 402L и/или 402R антенны антенной решетки.
[00109] Конструкция подсистемы 100 курсового радиомаяка PILS представляет собой проверенную на практике 8-элементную антенную решетку курсового радиомаяка в быстро развертываемой компактной упаковке. Это включает конструкцию компактной антенны по сравнению с обычными стационарными решениями курсового радиомаяка ILS, при этом каждая антенна управляется выделенным антенным радиоблоком 200. Как показано на фиг. 4, подсистема 400 курсового радиомаяка включает схему и/или программные модули, которые обеспечивают возможности, необходимые для:
• преобразования электропитания/резервной батареи (например, переключатель 422 входного электропитания, схема/модуль 406 преобразования электропитания, схема/модуль 408 резервной батареи),
• генерации и излучения сигнала (например, мультиплексор 410 данных, генератор 412 импульсов синхронизации ТХ, встроенное CPU 424 технического обслуживания),
• контроля характеристик сигнала и связанных с ним действий управления (например, схема/модуль 414 контроля и управления PILS, генератор 416 импульсов синхронизации RX, встроенное CPU 424 технического обслуживания), и
• удаленного интерфейса для настройки антенны и сообщения состояния персоналу управления воздушным движением или удаленному специалисту по техническому обслуживанию системы (например, блок 418 беспроводной передачи данных и антенна 420).
[00110] Интерфейс данных между функциями, содержащимися в блоке 404 цифровой обработки (DPU), включает:
• выделенную передачу данных к каждому ARU 4L…4R для конфигурации и регулировки параметров передатчика для каждой антенны,
• сигнал синхронизации для поддержания фазовой когерентности РЧ-несущей отдельных элементов,
• выделенную передачу данных от каждого ARU 4L…4R для предоставления наборов данных контроля для построения сигнала в пространстве для измерения характеристик системы,
• независимый сигнал синхронизации для согласования отдельных измерений контроля, и
• источник электропитания постоянного тока, который отключается цепями управления при обнаружении аварийного состояния. В качестве альтернативы или в сочетании эта функция может выполняться схемой 406 преобразования электропитания.
[00111] Фиг. 5 иллюстрирует способ, выполняемый курсовым радиомаяком портативной системы посадки по приборам (PILS) в соответствии с вариантами осуществления. Способ включает прием 500 данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков PILS. Способ также включает формирование 502 параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки, на основе принятых данных. Способ также включает передачу 504 параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения.
[00112] Предлагаемый компонент антенны курсового радиомаяка представляет собой фазированную решетку, которая вместе со связанными с ней передатчиками, излучает в пространство сигнал, который соответствует всем требованиям приложения к конвенции ИКАО к системам курсового радиомаяка ILS. Антенная решетка курсового радиомаяка обычно является физически самым большим компонентом ILS. В отличие от традиционных антенных решеток курсового радиомаяка, решетка курсового радиомаяка PILS разработана для достижения компромисса между характеристиками и размером упаковки. Фиг. 6 иллюстрирует стационарно-установленную 8-элементную решетку курсового радиомаяка, состоящую из ряда элементов антенны, расположенных в нескольких сотнях футов от конца взлетно-посадочной полосы. Элементы антенны курсового радиомаяка, показанные на фиг. 6, представляют собой логопериодические диполи (LPD), которые обеспечивают хорошую направленность и хороший коэффициент обратного излучения.
[00113] Критическим параметром, влияющим на характеристики курсового радиомаяка, является апертура решетки, т.е. полная ширина решетки. Угловая ширина переданного луча обратно пропорциональна размеру апертуры. Чем шире луч, тем больше вероятность того, что отражения от конструкций или крупных летательных аппаратов вблизи взлетно-посадочной полосы будут интерферировать с прямым сигналом в пространстве и искажать его, внося искажения в курс захода на посадку. Антенные решетки курсовых радиомаяков могут включать 8, 14, 20 или 32 элемента с апертурой в диапазоне от 51 фута для 8-элементной решетки до 246 футов для 32-элементной решетки. Однако следует понимать, что можно использовать указанное выше различное количество элементов и расстояние между ними. Например, для формирования диаграммы направленности антенны в соответствии с конкретными требованиями могут применяться различные элементы антенны и расстояние между ними.
[00114] Антенная решетка курсового радиомаяка PILS 100 может быть выполнена с возможностью использования 8-элементной одночастотной антенной решетки курсового радиомаяка с новой конструкцией элементов вместо LPD, описанных выше. Описанные выше LPD обычно больше и тяжелее. В соответствии с некоторыми вариантами осуществления элементы антенны антенной решетки курсового радиомаяка включают сдвоенную дипольную антенну. Например, фиг. 7 иллюстрирует приведенную для примера сдвоенную дипольную антенну в качестве элемента антенны антенной решетки курсового радиомаяка 400, описанного выше.
[00115] Два диполя питаются в квадратуре. Существенные характеристики этой антенны могут включать усиление 4,9 дБи, коэффициент обратного излучения 15,3 дБ и ширину луча по половине мощности 76°. Сдвоенная дипольная антенна имеет немного худшую направленность, чем LPD, описанная выше, что оказывает незначительное влияние на диаграмму направленности решетки курсового радиомаяка. Преимуществом сдвоенной дипольной антенны является ее малый размер и вес, а также возможность компактной упаковки. Фиг. 8 показывает зависимость относительной мощности от угла азимута для сигнала курс плюс боковая полоса (CSB) и сигнала только боковой полосы (SBO), излучаемых 8-элементной решеткой. Фиг. 8 иллюстрирует теоретическую диаграмму направленности, сгенерированную компьютерной моделью с шириной курса (измерение чувствительности смещения), установленной в 4,5°. Фиг. 9 показывает разницу в глубине модуляции (DDM) в одном и том же диапазоне угла азимута. DDM измеряется авионикой ILS летательного аппарата для определения углового смещения летательного аппарата от центральной линии удлиняющейся взлетно-посадочной полосы.
[00116] В соответствии с вариантами осуществления также описан глиссадный радиомаяк портативной системы посадки по приборам (PILS). Например, фиг. 10 иллюстрирует приведенный для примера глиссадный радиомаяк 1000 PILS 100. Глиссадный радиомаяк содержит антенную решетку без формирования изображения, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS. Например, фиг. 10 иллюстрирует глиссадный радиомаяк 1000, содержащий антенную решетку 1002 без формирования изображения, причем каждый элемент 1002L…1002R антенны антенной решетки 1002 непосредственно связан с соответствующими ARU GP1…GP4 PILS 100. Глиссадный радиомаяк также содержит схему обработки, связанную с каждым соответствующим антенным радиоблоком, непосредственно связанным с соответствующим элементом антенны антенной решетки без формирования изображения. В продолжение примера, фиг. 10 также иллюстрирует глиссадный радиомаяк 1000, содержащий блок 1004 цифровой обработки (DPU), связанный с каждым соответствующим ARU GP1…GP4, непосредственно связанными с соответствующими элементами 1002L…1002R антенны антенной решетки 1002 без формирования изображения. Следует отметить, что проиллюстрированное количество элементов антенны приведено в качестве примера, и что различное количество элементов антенны и различное расстояние между ними могут быть использованы для изменения формы диаграммы направленности антенны в соответствии с конкретными требованиями.
[00117] Схема обработки выполнена с возможностью приема от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков, согласно вариантам осуществления. В продолжение предыдущего примера, фиг. 10 иллюстрирует, что DPU 1004 может быть выполнена с возможностью приема от CCS 106 PILS 100 данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых ARU GP1…GP4. Схема обработки также выполнена с возможностью передачи параметров передачи в антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения. Например, фиг. 10 также иллюстрирует приведенный для примера DPU 1004, который может быть выполнен с возможностью передачи параметров передачи в антенные радиоблоки, такие как ARU GP1…GP4, для генерирования РЧ-сигналов для передачи их через элементы 1002L…1002R антенны антенной решетки 1002 без формирования изображения.
[00118] Подсистема 1000 глиссадного радиомаяка PILS, показанная на фиг. 10, использует аналогичные монтируемые блоки, что и подсистема 400 курсового радиомаяка, показанная на фиг. 4. Поскольку конструкция включает цифровую схему вплоть до точки, где ARU выдает РЧ-сигнал на свою выделенную антенну, в остальной части конструкции нет компонентов, специфичных для радиочастот. Тот же подход применим к управлению питанием, DPU и блок беспроводной передачи данных выполняют функции, аналогичные описанным выше в отношении курсового радиомаяка 400. Поскольку оборудование 1000 GP смещено от взлетно-посадочной полосы (см. фиг. 1), функция FCR использует блок 1024 радиосвязи проверки полетов и антенну 1026 FCR, совмещенную с GP 1000 для электропитания и передачи данных.
[00119] Разработка антенной решетки глиссадного радиомаяка PILS, которая соответствует требованиям к упаковке и времени развертывания для PILS, является более сложной задачей, чем для решетки курсового радиомаяка. Типичная антенная решетка глиссадного радиомаяка состоит из двух или трех антенн, смонтированных на вертикальной мачте. Высота мачты может достигать 40 футов, в зависимости от угла возвышения радиомаяка. Большинство известных решеток глиссадного радиомаяка представляют собой системы с формированием изображения: они обеспечивают правильный сигнал глиссадного радиомаяка в пространстве за счет объединения прямого излучения с излучением, отраженным от земли. Двухэлементную систему глиссадного радиомаяка с формированием изображения можно рассматривать как два верхних элемента на мачте и два элемента зеркального изображения под землей. Для правильной работы такой системе требуется пространство в несколько сотен футов перед мачтой, которое должно быть плоским и свободным от препятствий.
[00120] Для приложения PILS мачта будет непомерно большой, и многие площадки SF-PALC вряд ли будут иметь рельеф, подходящий для системы с формированием изображения. В отличие от известных систем глиссадного радиомаяка с формированием изображения, PILS 100 содержит антенную решетку без формирования изображения, которая расположена горизонтально на высоте нескольких футов над землей. Фиг. 11 иллюстрирует различия между известными антенными решетками 1100 с формированием изображения и антенной решеткой 1102 без формирования изображения для PILS. Ниже описан анализ процесса изобретательского проектирования от стандартной решетки 1100 до изобретенной антенной решетки 1102 без формирования изображения для PILS.
[00121] Рассмотрим стандартную нулевую эталонную антенную решетку 1100 глиссадного радиомаяка, как показано в кадре А на фиг. 11. Прямые сигналы, излучаемые из антенн а и b, объединяются с отраженными сигналами, которые излучаются антеннами изображения с и d, для получения сигнала глиссадного радиомаяка в пространстве. Обычный угол возвышения глиссадного радиомаяка составляет 3°, что определяется амплитудами и фазами излучаемых сигналов, а также расстоянием между антеннами. Летательный аппарат ниже глиссадного радиомаяка увидит сигнал взлета, а летательный аппарат выше глиссадного радиомаяка увидит сигнал снижения.
[00122] Теперь представьте, что мачта поворачивается на 90° вертикально и заменяет антенны изображения реальными антеннами (кадр В на фиг. 11). Угол глиссадного радиомаяка изменится от 3° над горизонтом до 3° от зенита в направлении от порога взлетно-посадочной полосы.
[00123] В кадре С на фиг. 11 фазы отдельных элементов антенны отрегулированы для поворота луча еще на 84° против часовой стрелки, как показано на фиг. 11, так что он снова находится на 3° над горизонтом, хотя и в противоположном направлении. В этой точке кадр С сохраняет пропорциональность в расстоянии между элементами, так что летательный аппарат на глиссадном радиомаяке видит то же расстояние между антеннами, которое он бы видел от глиссадного радиомаяка до стандартной нулевой эталонной решетки на вертикальной мачте. При угле глиссадного радиомаяка 3° это увеличивает апертуру с 57 футов до 542 футов.
[00124] В кадре D на фиг. 11 решетка поворачивается горизонтально на 180°, чтобы установить глиссадный радиомаяк в правильном направлении. Также необходимо поменять местами сигналы модуляции 90 Гц и 150 Гц, чтобы восстановить правильные направления подъема и снижения. Эта реализация является довольно радикальным отходом от стандартной конструкции антенны глиссадного радиомаяка, показанной на кадре А. Что делает ее возможной, так это наличие программно-определяемых передатчиков, которые могут управлять элементами антенны посредством сигналов, имеющих очень точные амплитуды и фазы, которые могут быть легко и точно отрегулированы в процессе настройки.
[00125] Текущим выбором для элементов антенной решетки без формирования изображения является логопериодический диполь (LPD) на частоте 330 МГц. Четвертьволновый диполь на 330 МГц также рассматривается как жизнеспособный вариант для заявленного решения. В обоих вариантах маленькие LPD (благодаря работе в полосе ультравысоких частот глиссадного радиомаяка) значительно более компактны, чем обычная антенна глиссадного радиомаяка, используемая системой формирования изображения. Фиг. 12 иллюстрирует приведенные для примера элементы антенны LPD решетки без формирования изображения. В альтернативном варианте осуществления элементы антенны решетки без формирования изображения могут содержать элемент антенны типа Вивальди.
[00126] Фиг. 13 показывает вертикальную диаграмму направленности AAN 104, измеренную в камере при углах азимута 0, ±5° и ±15°. Предварительное компьютерное моделирование горизонтальной решетки, полученной из стандартного нулевого эталона, было выполнено с многообещающими результатами. Фиг. 14 показывает теоретическую диаграмму несущей плюс боковая полоса (CSB) и теоретическую диаграмму только боковой полосы (SBO) для системы 3° глиссадного радиомаяка. График охватывает диапазон углов азимута, конкретизированный в приложении 10 к конвенции ИКАО, т.е. от 0,45θ до 1,75θ или от 1,35° до 5,25°. Это моделирование предполагает вертикальную диаграмму направленности AAN 104 и не учитывает эффекты отражения от земли. Фиг. 15 показывает диаграмму DDM. График является линейным и симметричным относительно точки 0 DDM и соответствует требованиям чувствительности смещения приложения 10.
[00127] Описанные выше графики идеализированы в том смысле, что они не учитывают влияние отражений на сигнал в пространстве. Любые сигналы, которые отражаются от земли, могут интерферировать с прямым сигналом. Сигнал глиссадного радиомаяка имеет горизонтальную поляризацию, что означает сдвиг фазы на 180° при отражении. Отраженная волна будет конструктивно или деструктивно интерферировать с прямой волной в зависимости от угла возвышения и высоты антенны.
[00128] Фиг. 16 показывает диаграмму направленности CSB и SBO, сгенерированная компьютерной моделью, которая включает отражения от земли. Моделирование предполагает гладкую и ровную поверхность, что несколько увеличивает эффекты отражения по сравнению с тем, что можно было бы ожидать для реальной системы.
[00129] Обратите внимание, что отражения вызывают снижение мощности сигнала при углах возвышения менее 3°. Это происходит потому, что при очень малых углах возвышения разница в расстоянии до маяка от антенны до летательного аппарата между прямой и отраженной волнами невелика. В сочетании со сдвигом фазы отраженной волны на 180° это приводит к существенной деструктивной интерференции.
[00130] Фиг. 17 показывает те же диаграммы направленности CSB и SBO для стандартной нулевой эталонной решетки глиссадного радиомаяка на мачте. Обратите внимание, что как для стандартной, так и для модифицированной решетки CSB и SBO излучаемая мощность снижается при малых углах возвышения, причем эффект несколько более выражен для модифицированной решетки. Этого следовало ожидать, поскольку модифицированные антенные решетки монтируются ближе к земле, чем стандартная решетка.
[00131] Фиг. 18 показывает DDM для модифицированной решетки с включенными эффектами отражения. Обратите внимание, что диаграмма DDM идентична диаграмме без эффектов отражения. Для нулевой эталонной решетки каждая из CSB и SBO питают одну пару элементов антенны. Таким образом, в предположении о гладкой и ровной поверхности земли сдвиг фаз, вызванный интерференцией, будет одинаковым для каждой антенны в паре без чистого влияния на DDM. В реальной системе для каждой антенны в паре могут возникать немного разные сдвиги фаз, что приводит к небольшому сдвигу угла глиссадного радиомаяка, который можно скорректировать путем регулировки фазы в процессе настройки.
[00132] Фиг. 19 иллюстрирует способ, выполняемый глиссадным радиомаяком портативной системы посадки по приборам (PILS), в соответствии с вариантами осуществления. Способ включает прием 1900 от системы управления PILS данных, используемых для формирования параметров передачи для РЧ-сигналов, генерируемых каждым соответствующим антенным радиоблоком PILS. Способ также включает формирование 1902 параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки без формирования изображения, на основе принятых данных. Способ также включает передачу 1904 параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения.
[00133] Фиг. 20 иллюстрирует архитектуру контроля системы 414 (курсовой радиомаяк)/1014 (глиссадный радиомаяк) контроля и управления PILS описанной здесь PILS, которая выполняет сбор сигналов, цифровую обработку сигналов, согласование сигналов и обнаружение аварийных состояний. Архитектура контроля PILS, проиллюстрированная на фиг. 20, выполняет мультиплексирование сигнала антенны, преобразование сигнала и обнаружение аварийных состояний для десяти низкоскоростных каналов ARU RX с использованием схемы 2118 преобразования и защиты сигнала антенны, схемы 2120 мультиплексирования сигнала антенны, процессоров 2102 и 2104 и интерфейсов связи 2110-2116. Локальные источники электропитания и схема 2122 защиты по напряжению подает электропитание постоянного тока и сигналы напряжения постоянного тока на части DPU и, в конечном счете, также на антенные радиоблоки, если это необходимо. Схема 2122 защиты по напряжению также обеспечивает защиту по напряжению от скачков напряжения и т.п. Тактовый генератор и схема 2124 генерации вырабатывают тактовый сигнал, который используется для поддержания надлежащей синхронизации DPU и ARU. Архитектура контроля PILS, проиллюстрированная на фиг. 20, требует значительно меньше ресурсов микропроцессора по сравнению с известной архитектурой контроля DVOR, которая может обусловливать полезную информацию о низкоскоростном сигнале ARU RX. Известные функциональности сбора данных DVOR, цифровой обработки сигналов и преобразования сигналов собирают 8 каналов радиочастотной информации со скоростью 240 кбит/с, выполняют несколько уровней цифровой обработки сигналов перед восстановлением информации о сигнале. Напротив, архитектура контроля PILS, проиллюстрированная на фиг. 20, получает только 10 каналов информации о низкоскоростном сигнале ARU. Функция контроля архитектуры контроля PILS на фиг. 20 описана ниже.
[00134] Сигналы 2100 поступают от блоков ARU антенн, преобразовываются блоками 2118 схем, мультиплексируются для обработки схемой 2120 мультиплексирования сигнала антенны и распределяются на два процессора 2102 и 2104, которые анализируют данные сигнала и определяют, удовлетворяет ли сигнал в пространстве заданным техническим характеристикам. Процессоры также обмениваются информацией со встроенным CPU 2106 технического обслуживания через интерфейсы 2112 и 2116 связи. Встроенный CPU 2106 технического обслуживания (аналогичный позициям 424 или 1026 на фиг. 4 и 10, соответственно) выполнен с возможностью обеспечения связи FCR и автоматической калибровки, а также информации, связанной с характеристиками и техническим обслуживанием, для персонала управления и технического обслуживания мачты. Процессоры 2102 и 2104 также подают команды отключения через интерфейсы 2110 и 2114 связи, соответственно, в систему 2108 управления электропитанием (может содержать схему 404 или 1006 преобразования электропитания на фиг. 4 и 10, соответственно) для прекращения излучения сигнала в пространство, когда обнаруживается, что сигнал не соответствует заданным техническим характеристикам. Функция контроля включает возможность встроенного тестирования, контроль температуры и цепей защиты по электропитанию. Отключение электропитания обеспечивает отказоустойчивое решение по отключению и взаимодействие с системами электропитания ARU.
[00135] В соответствии с вариантами осуществления множество антенных радиоблоков, глиссадный радиомаяк, антенная решетка без формирования изображения, курсовой радиомаяк, антенная решетка курсового радиомаяка и система управления выполнены с возможностью транспортировки на грузовом поддоне перед развертыванием. Например, описанное здесь портативное решение ILS предназначено для использования с одним поддоном 463L и включает все оборудование, необходимое для установки, настройки и эксплуатации системы. Фиг. 21 и 22 иллюстрируют различные виды приведенного для примера упаковочного решения. Фиг. 21 и 22 иллюстрируют разные виды двух отдельных узлов, поднимаемых на вилочных салазках, для транспортировки к полевому местоположению из точки высадки с воздуха или с земли.
[00136] Узел курсового радиомаяка содержит:
• Складную решетку курсового радиомаяка с заранее установленной и подключенной антенной (c ARU) и с одним заградительным огнем на каждом конце.
• Генератор МЕР-015А 1,5 кВА, заранее подключенный к системе управления выбором электропитания.
• Резервную батарею.
• Коробку управления PILS, которая включает:
ο Логику выбора входного электропитания.
ο Электронику PILS (Контроль и управление, компьютер технического обслуживания…).
ο Блок беспроводной передачи данных.
• Антенну WDR.
• Упаковку анкеров.
• Инструменты для сборки.
• Кабель переменного тока в катушке для забивки анкеров.
[00137] Узел глиссадного радиомаяка содержит:
• Четыре элемента GP в защитном футляре с ARU.
• Четыре штатива для установки элемента GP.
• Катушки кабеля.
• Генератор МЕР-015А 1,5 кВА, заранее подключенный к системе управления выбором электропитания.
• Резервную батарею.
• Коробку управления PILS, которая включает:
ο Логику выбора входного электропитания.
ο Электронику PILS (Контроль и управление, компьютер технического обслуживания…),
ο Блок беспроводной передачи данных,
ο Блок FCR.
• Антенну WDR и соответствующая мачта.
• Антенну FCR и соответствующая мачта.
• Упаковку анкеров.
• Инструменты для сборки.
• Кабель переменного тока в катушке для забивки анкеров.
• Подсистему выдачи команд и управления, которая включает:
ο Ноутбук в защищенном исполнении,
ο Дрон с полезной нагрузкой,
ο Блок радиоуправления дроном.
ο Две рации с двухсторонней связью.
[00138] Эта концептуальная конструкция разрабатывалась, чтобы гарантировать, что определенные компоненты системы могут быть упакованы в определенном пространстве. Полное упаковочное решение PILS спроектировано как два узла оборудования, которые разделяются в точке разгрузки и перемещаются в соответствующие им местоположения курсового радиомаяка и глиссадного радиомаяка. Решение, показанное для вилочного погрузчика, также может быть оснащено колесами и выдвижным буксировочным приспособлением в альтернативном варианте.
[00139] В соответствии с некоторыми вариантами осуществления антенная решетка курсового радиомаяка выполнена с возможностью сворачивания и расширения. Как проиллюстрировано на фиг. 23, развертывание курсового радиомаяка является простым и легко выполняется двумя обученными сотрудниками, с учетом того, что оно включает минимальный набор задач, включающих:
• Раскладывание каждой половины решетки до ее полного расширения.
• Расширение задней опоры каждой секции рамы.
• Опускание регулируемых по высоте опор рамы (предусмотрено для компенсации неровностей поверхности).
• Анкеровка опор опорных ножек посредством шнековых анкеров, идеально подходящих для условий крупнозернистого и мелкозернистого грунта.
• Подъем и блокировка антенны курсового радиомаяка на заданной высоте.
• Подъем и крепление направленной антенны WDR и выравнивание направления расположения подсистемы глиссадного радиомаяка.
• Подключение любого доступного внешнего электропитания (но не обязательно).
• Запитывание подсистемы курсового радиомаяка путем использования заряженных батарей для генератора.
[00140] При минимальном наборе задач и использовании прилагаемого ударного инструмента для ускорения установки анкеров подсистема курсового радиомаяка в описанной выше упаковке может быть установлена и подготовлена к настройке за 30-45 минут силами должным образом обученного персонала.
[00141] Фиг. 24 и 25 иллюстрируют два разных вида упакованной конфигурации глиссадного радиомаяка и подсистем выдачи команд и управления, подготовленных для развертывания. Хотя фактическое показанное оборудование (например, штативы) будет специально разработано в соответствии с потребностями программы для крепления на земле (с использованием шнековых анкеров, как в случае с курсовым радиомаяком) и полезной нагрузки, предполагаемый размер был использован для обеспечения того, чтобы оборудование можно было разместить в отведенном пространстве.
[00142] При развертывании антенны GP будет использоваться вспомогательное средство установки, которое позволяет провести прямую линию, чтобы совместить четыре антенны с измерительными метками, чтобы установить правильное положение, параллельное взлетно-посадочной полосе летательного аппарата. Затем анкерами закрепляются штативы, а антенна устанавливается с использованием быстроразъемного монтажного башмака до ее подключения к кабелям и поднятия на желаемую высоту до 2,5 метров.
[00143] После того, как все четыре антенны установлены и подключены кабелями обратно к блоку цифровой обработки GP (например, DPU 1004 на фиг. 10), подается электропитание путем использования батареи, встроенного генератора или внешнего электропитания, если такое имеется. Как и в случае с курсовым радиомаяком, антенна GP с кабелями может быть установлена и подготовлена к настройке за 30-45 минут силами должным образом обученного персонала.
[00144] Решение PILS стремится минимизировать время установки, как описано выше. Таким образом, демонтаж и сворачивание сведены к минимуму за счет:
• Использования шнековых анкеров, которые быстро снимаются с использованием прилагаемого ударного гайковерта.
• Катушек кабелей с кривошипным механизмом для быстрой перемотки кабелей на соответствующие им барабаны.
• Определения специальных мест для размещения каждой единицы оборудования, которое необходимо разместить.
• Сведения к минимуму количества деталей, которые необходимо снять с узлов во время развертывания.
[00145] В соответствии с некоторыми другими вариантами осуществления также описана система управления портативной системой посадки по приборам (PILS). Система управления содержит приемопередатчик, выполненный с возможностью связи с системой беспилотного летательного аппарата (UAS). Например, фиг. 26 иллюстрирует систему 2600 выдачи команд и управления (CCS), выполненную с возможностью связи с UAS 2602. Система управления также содержит процессор и память, содержащую исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором приема, от UAS с использованием приемопередатчика, данных измерений, связанных с первым РЧ-сигналом, переданным курсовым радиомаяком или глиссадным радиомаяком PILS. Например, CCS 2600 содержит вычислительное устройство 2626, содержащее процессор 2704 и память 2706, которая может содержать исполняемые инструкции, которые при их исполнении процессором 2604 вызывают выполнение процессором 2604 приема, от UAS 2602 с использованием приемопередатчика 2608 WDR, данных измерений, связанных с первым РЧ-сигналом (курсового радиомаяка 2614 и/или глиссадного радиомаяка 2616), переданным курсовым радиомаяком (102) или глиссадным радиомаяком (104) PILS 100 на фиг. 1. Фиг. 26 также иллюстрирует, что CCS 2600 может содержать приемник 2638 GPS, выполненный с возможностью приема сигналов 2640 GPS. Данные от RX 2638 GPS и WDR 2608 собираются интерфейсом 2624, который передает данные в вычислительное устройство 2626.
[00146] В соответствии с вариантами осуществления память также содержит исполняемые инструкции, которые при их исполнении процессором, вызывают выполнение процессором генерации данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи, используемых антенными радиоблоками PILS, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения. В продолжение вышеприведенного примера, память 2606 также может содержать исполняемые инструкции, которые при их исполнении процессором 2604 вызывают выполнение процессором 2604 генерации данных, используемых курсовым радиомаяком 104 или глиссадным радиомаяком 106 для формирования параметров передачи, используемых антенными радиоблоками PILS 100, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка (например, антенной решетки 402 на фиг. 4) или антенной решетки без формирования изображения (например, антенной решетки 1002 без формирования изображения на фиг. 10), для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки 402 или антенной решетки 1002 без формирования изображения.
[00147] Память также содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором передачи в курсовой радиомаяк или в глиссадный радиомаяк данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи. В продолжение вышеприведенного примера, память 2606 также может содержать исполняемые инструкции, которые при их исполнении процессором 2604 вызывают выполнение процессором 2604 передачи в курсовой радиомаяк 104 или в глиссадный радиомаяк 102 данных, используемых курсовым радиомаяком 104 или глиссадным радиомаяком 102 для формирования параметров передачи.
[00148] В соответствии с некоторыми вариантами осуществления память также может содержать исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором передачи, в UAS с использованием приемопередатчика, инструкции выполнить полет в конкретные местоположения относительно взлетно-посадочной полосы летательного аппарата, совмещенной с PILS, и инструкции получить данные измерений, связанные со вторыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком. Например, память 2606 также может содержать исполняемые инструкции, которые при их исполнении процессором 2604 вызывают выполнение процессором 2604 передачи, в UAS 2602 (см. также дрон 110 настройки на фиг. 1) с использованием WDR 2608, инструкции выполнить полет в конкретные местоположения относительно взлетно-посадочной полосы летательного аппарата, проиллюстрированной на фиг. 1, совмещенной с PILS, и инструкции получить данные измерений, связанные со вторыми РЧ-сигналами, переданными курсовым радиомаяком 104 или глиссадным радиомаяком 102. Память также может содержать исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором приема, от UAS с использованием приемопередатчика, полученных данных измерений в ответ на передачу инструкции. В этом примере процессор 2704 принимает, от UAS 2602/дрона 110 настройки с использованием WDR 2608, полученные данные измерений в ответ на передачу инструкции. Память также может содержать исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором определения, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений. В продолжение примера, процессор 2604 может определить, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений.
[00149] Память также может содержать исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором определения того, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, основанном на полученных данных измерений. В продолжение предыдущего примера, процессор 2604 может определить, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, основанном на полученных данных измерений. Память также может содержать исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором генерации данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания, используемых антенными радиоблоками, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования третьих РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения.
[00150] Например, процессор 2604 может формировать параметры передачи технического обслуживания, используемые антенными радиоблоками PILS 100, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка (например, антенной решетки 402) или антенной решетки без формирования изображения (например, решетка 1002 без формирования изображения), для генерирования третьих РЧ-сигналов, передаваемых элементами антенны (например, 402L-402R, 1002 GP1-GP4) антенной решетки 402 курсового радиомаяка или антенной решетки 1002 без формирования изображения PILS 100.
[00151] Фиг. 27 иллюстрирует способ, выполняемый системой управления портативной системой посадки по приборам (PILS), в соответствии с вариантом осуществления настоящего изобретения. Фиг. 27 иллюстрирует способ, включающий прием 2700, от UAS с использованием приемопередатчика системы управления, данных измерений, связанных с первыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS. Способ также включает генерирование 2704 данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи, используемых антенными радиоблоками PILS, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения. Способ также включает передачу 2708 в курсовой радиомаяк или в глиссадный радиомаяк данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи.
[00152] Фиг. 28 иллюстрирует способ, который может включать передачу 2800, в UAS с использованием приемопередатчика, инструкции выполнить полет в конкретное местоположение относительно взлетно-посадочной полосы летательного аппарата, совмещенной с PILS, и инструкции получить данные измерений, связанные со вторыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком, согласно некоторым вариантам осуществления. Например, CCS 2600 может передать, в UAS 2602 с использованием WDR 2608, инструкция выполнить полет в конкретное местоположение относительно взлетно-посадочной полосы летательного аппарата, совмещенной с PILS 100, и инструкцию получить данные измерений, связанные со вторыми РЧ-сигналами, переданными курсовым радиомаяком 104 или глиссадным радиомаяком 102. Способ также может включать прием 2804, от UAS с использованием приемопередатчика, полученных данных измерений в ответ на передачу инструкции. В продолжение примера, CCS 2600 может принимать, от UAS 2602 с использованием WDR 2608, полученные данные измерений в ответ на передачу инструкции. Способ также может включать определение 2808, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений. Например, CCS 2600 может определить, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений.
[00153] Фиг. 29 иллюстрирует, что способ, включающий определение, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений, может включать определение 2900 того, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, основанном на полученных данных измерений, в соответствии с некоторыми вариантами осуществления. В продолжение предыдущего примера, CCS 2600 может определять, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, основанном на полученных данных измерений. Способ также может включать генерирование 2904 данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания, используемых антенными радиоблоками, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования третьих РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, в ответ на определение параметров вторых РЧ-сигналов, которые не находятся в диапазоне значений.
[00154] Например, CCS 2600 может генерировать данные технического обслуживания, используемые курсовым радиомаяком 104 или глиссадным радиомаяком 102 для формирования параметров передачи технического обслуживания, используемых антенными радиоблоками PILS 100, непосредственно связанными с соответствующими элементами антенны (например, 402L-402R, 1002 GP1-GP4) антенной решетки 402 курсового радиомаяка или антенной решетки 1002 без формирования изображения, для генерирования третьих РЧ-сигналов, передаваемых элементами антенны антенной решетки 402 курсового радиомаяка или антенной решетки 1002 без формирования изображения, в ответ на определение параметров вторых РЧ-сигналов, которые не находятся в диапазоне значений. Способ также может включать передачу 2908 в курсовой радиомаяк или в глиссадный радиомаяк данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания. Например, CCS 2600 может передавать в курсовой радиомаяк 104 или в глиссадный радиомаяк 102 данные технического обслуживания, используемые курсовым радиомаяком 104 или глиссадным радиомаяком 102 для формирования параметров передачи технического обслуживания.
[00155] Фиг. 30 иллюстрирует, что способ может включать прием 3000 от измеряющего устройства, связанного с системой управления, информации, идентифицирующей расстояние между UAS и измеряющим устройством. Например, CCS 2600 может принимать от измеряющего устройства, связанного с CCS 2600, информацию, идентифицирующую расстояние между UAS 2602 и устройством измерения. Приведенные для примера варианты осуществления измеряющих устройств более подробно описаны ниже. Способ также может включать определение 3002 местоположения UAS в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, на основе информации, идентифицирующей расстояние между UAS и измеряющим устройством. В продолжение примера, CCS 2600 может определять местоположение UAS 2602 в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS 100, на основе информации, идентифицирующей расстояние между UAS 2602 и измеряющим устройством. В некоторых вариантах осуществления CCS 2600 может принимать данные измерения высоты от UAS 2602, а также может определять местоположение UAS 2602 в воздушном пространстве на основании измерения высоты от UAS 2602.
[00156] Фиг. 31 иллюстрирует, что способ может включать прием 3100 от измеряющего устройства, связанного с системой управления, информации, идентифицирующей расстояние между UAS и измеряющим устройством. Например, CCS 2600 может принимать от измеряющего устройства, связанного с системой управления, информацию, идентифицирующую расстояние между UAS 2602 и измеряющим устройством. Способ также может включать определение 3102 местоположения UAS в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, на основе информации, идентифицирующей расстояние между UAS и измеряющим устройством. В продолжение примера, CCS 2600 может определять местоположение UAS 2602 в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS 100, на основе информации, идентифицирующей расстояние между UAS 2602 и измеряющим устройством.
[00157] Способ также может включать определение 3104 того, что UAS необходимо переместиться в другое местоположение в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, для получения данных измерений, связанных с первыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS, на основе определенного местоположения UAS. В продолжение предыдущего примера, CCS 2600 может определять, что UAS 2602 необходимо переместиться в другое местоположение в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS 100, для получения данных измерений, связанных с первыми РЧ-сигналами, переданными курсовым радиомаяком 104 или глиссадным радиомаяком 102 PILS 100, на основе определенного местоположения UAS 2602. Способ также может включать передачу 3104 в UAS инструкции переместиться в другое местоположение в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, и инструкции получить данные измерений в этом другом местоположении. Например, CCS 2600 может передать в UAS 2602 инструкцию переместиться в другое местоположение в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS 100, и инструкцию получить данные измерений в этом другом местоположении.
[00158] В некоторых вариантах осуществления способ может включать определение местоположения UAS в воздушном пространстве, включая определение местоположения UAS в воздушном пространстве, где отсутствуют сигналы GPS, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, на основе информации, идентифицирующей расстояние между UAS и измеряющим устройством. Например, UAS 2602 может находиться в воздушном пространстве, где отсутствуют сигналы GPS, или в воздушном пространстве, где сигналы GPS не могут быть получены из-за интерференции, как обсуждалось выше. В некоторых вариантах осуществления CCSS 2600 может принимать от UAS 2602 индикацию того, что UAS 2602 работает в воздушном пространстве, где отсутствует GPS. В некоторых вариантах осуществления индикация может содержать измерения интерференции, принимаемые приемником 2622 GPS UAS 2602.
[00159] Следует понимать, что дрон 110 настройки PILS на фиг. 1 может быть эквивалентен UAS 2602, проиллюстрированной на фиг. 26. Также следует понимать, что CCS 2600 может быть эквивалентна CCS 106, проиллюстрированной на фиг. 1.
[00160] Одним из наиболее критичных действий в процессе развертывания PILS 100 является точная настройка сигналов LOC и GS. Традиционный метод настройки сигналов LOC и GS включает использование портативного навигационного приемника (PNR), теодолита или лазерной системы слежения (LTS) и летательного аппарата с приемником ILS. Этот процесс кратко описан в нижеследующих абзацах.
[00161] PNR позволяет техническим специалистам анализировать сигналы, принимаемые от наземных навигационных средств, в рабочих условиях. Это позволяет пользователям анализировать параметры навигации, позволяющие им выполнять наземную проверку ILS или VOR, а также выполнять спектральный анализ, измерения низкочастотного звука и регистрацию данных. В PNR используется передовая программно-определяемая радиотехнология для измерения и анализа сигналов наземных навигационных средств для установки, полетных проверок и долгосрочного технического обслуживания. PNR измеряет разницу в глубине модуляции (DDM) и процентной модуляции, радиочастоту, звуковую частоту, общие гармонические искажения (THD) и другие параметры. PNR включает встроенный дисплей спектра и формы сигнала.
[00162] После установки системы PILS PNR размещается на центральной линии взлетно-посадочной полосы примерно в 500 футах от LOC. Затем точно измеряется расстояние от LOC до PNR. Уровень сигнала LOC принимается PNR и передается оператором PNR техническому специалисту LOC. Технический специалист LOC определяет и вносит корректировки, необходимые для добавления нуля в диаграмму направленности антенны только боковой полосы (SBO) на центральной линии. Исторически сложилось так, что корректировки в LOC вносились путем обрезания кабелей для модификации фазового соотношения элементов антенны, что является громоздким процессом. Следующим шагом является вычисление требуемой ширины курса, которая зависит от длины взлетно-посадочной полосы. Это достигается путем размещения PNR в вычисленной и измеренной позиции с каждой стороны взлетно-посадочной полосы перпендикулярно центральной линии в начальной позиции размещения PNR. Расстояние смещения вычисляется на основе желаемой ширины и точного расстояния до PNR. Уровни сигнала снова измеряются и сообщаются техническому специалисту LOC, определяются корректировки, а затем корректируется диаграмма направленности антенны до тех пор, пока DDM не станет равным 0,155. Также требуется настройка встроенного контроля, что требует, как обрезки кабеля, так и других регулировок.
[00163] При правильном выравнивании LOC летательный аппарат используется для настройки угла глиссадного радиомаяка и ширины. Летательный аппарат летит к взлетно-посадочной полосе вдоль центральной линии примерно в 4 морских милях от нее. Летательный аппарат использует сигнал LOC, чтобы оставаться на одной линии с центральной линией и летит на постоянной высоте (примерно 500-800 футов). Летательный аппарат отслеживается теодолитом или лазерным трекером для непрерывного измерения угла возвышения летательного аппарата. Летательный аппарат имеет приемник, измеряющий DDM глиссадного радиомаяка. Поскольку летательный аппарат продолжает лететь к взлетно-посадочной полосе, он в конечном итоге достигнет DDM=+0,175. В этой точке пилот радирует оператору на земле, чтобы зарегистрировать угол возвышения летательного аппарата. По мере того, как летательный аппарат продолжает свой путь, DDM проходит через нуль и, в конце концов, достигает DDM=- 0,175, где угол возвышения снова регистрируется. Затем GS определяется путем усреднения двух углов возвышения. Иногда выполняются многократные полеты летательного аппарата, и угол глиссадного радиомаяка усредняется по этим полетам. Затем делаются регулировки угла GS.
[00164] Вышеупомянутый процесс задействует несколько человек, использование пилотируемого (с пилотами) летательного аппарата и ручную обрезку кабелей для корректировки фаз для модифицирования диаграммы направленности антенны. Напротив, настоящее раскрытие описывает почти полностью автоматизированный процесс настройки с использованием роторной UAS 1 класса вместо пилотируемого летательного аппарата. Предполагается, что правильно оборудованная UAS может предоставить необходимые данные и обеспечивать большую гибкость траектории полета, тем самым устраняя необходимость в настройке полетов посредством летательного аппарата. То же самое оборудование также может поддерживать периодические измерения, необходимые для поддержки рекомендаций конвенции ИКАО и FAA для систем ILS, как с точки зрения наземных измерений, так и с точки зрения воздушных измерений, что также помогает полностью автоматизировать периодические проверки.
[00165] Как показано на фиг. 26, UAS 2602 содержит PNR 2610 и PNR 2612. PNR 2610 и PNR 2612 могут быть выполнены с возможностью одновременного измерения сигналов курсового радиомаяка 2614 и глиссадного радиомаяка 2616 в пространстве и передачи различных данных на землю. Если GPS доступен, сигнал 2618 GPS может служить вторичной проверкой местоположения UAS. UAS 2602 также содержит полезную нагрузку в виде батарейной нагрузки 2630 и хранилищ 2632 данных. UAS 2602 также может принимать инструкции и связываться с устройством 2636 выдачи команд и управления UAS через интерфейс 2634 управления и электропитания UAS.
[00166] В некоторых вариантах осуществления приемник 2638 GPS CCS 2600 и приемник 2622 GPS UAS 2602 выполнены с возможностью обнаружения интерференции при приеме сигналов GPS в воздушном пространстве, ближайшем к системе PILS. В случае обнаружения интерференции приемники 2638 и 2622 GPS могут быть отключены. В некоторых вариантах осуществления обнаружение интерференции может включать обнаружение значения отношения код-шум или значения код-минус-несущая, что указывает интерференцию в воздушном пространстве. Псевдодальность и дальность-скорость могут контролироваться независимо. Контроль при обнаружении интерференции также может осуществляться на нескольких частотах спутникового сигнала. В некоторых случаях конкретные входные и выходные данные приемника являются чувствительными, например, распределение AD-бинов и данные автоматической регулировки усиления, и могут указывать на интерференцию при приеме сигналов GPS в воздушном пространстве.
[00167] Таким образом, UAS 2602 также может содержать WDR 2620, барометрический высотомер и PNR 2610 и 2612. WDR 2620 взаимодействует с PNR 2610 и 2612 через интерфейс 2628. Как и в предыдущем способе, первым этапом является размещение UAS 2602 на центральной линии взлетно-посадочной полосы примерно в 500 футах от LOC. UAS 2602 будет принимать сигнал LOC и широковещательно передавать данные PNR с периодической скоростью вместе со своей высотой. Переданный сигнал будет приниматься на наземной станции управления или CCS 2600 через WDR. Данные будут обрабатываться, и необходимые корректировки к фазе и амплитуде будут подаваться в LOC по контуру обратной связи. Поскольку в PILS 100 используются активные элементы антенны, фаза и амплитуда элементов могут автоматически модифицироваться с использованием программного обеспечения и схемы обработки, чтобы установить антенну в нулевое положение на центральной линии взлетно-посадочной полосы. Это приведет к быстрому и точному процессу сходимости нуля диаграммы LOC на центральной линии взлетно-посадочной полосы. Затем UAS 2602 перемещают к сторонам взлетно-посадочной полосы или за пределы взлетно-посадочной полосы, и аналогичный процесс выполняется для ширины LOC.
[00168] После того, как LOC настроен, этот сигнал может быть передан оператору дрона на наземной станции и использован им для управления полетом UAS 2602 по удлиненной центральной линии взлетно-посадочной полосы. Затем UAS 2602 поднимают на высоту примерно 800 футов над поверхностью взлетно-посадочной полосы с использованием в качестве эталона барометрического высотомера UAS. Оттуда UAS 2602 летит вдоль удлиненной центральной линии за взлетно-посадочную полосу, используя сигнал LOC, одновременно измеряя и передавая DDM глиссадного радиомаяка, как описано выше для традиционной полетной проверки.
[00169] Типичный угол тета (θ) глиссадного радиомаяка составляет 3 градуса для захода на посадку по категории I. Приложение 10 конвенции ИКАО требует, чтобы глиссадный радиомаяк ILS находился в пределах 0,075θ или ±0,225 градуса. Если UAS 2602 летит на относительно большой высоте (например, 800 футов), высокоточное измерение угла возвышения может быть получено косвенным путем с относительно низкой точностью измерения дальности и высоты. В этой ситуации подойдет барометрический высотомер. Барометрическая настройка, используемая для получения абсолютной высоты, не требуется, поскольку требуется только высота относительно высоты взлетно-посадочной полосы. Существует несколько методов определения дальности до UAS 2602, чтобы можно было вычислить угол возвышения и использовать его для выравнивания GS. Три различных метода измерения дальности включают: радиолокатор, системы лазерного слежения и приемоответчики.
[00170] Радиолокатор Thales Squire™ представляет собой переносимый человеком обзорный радиолокатор Х-диапазона. Хотя радиолокатор изначально был разработан как наземный обзорный радиолокатор, он был модифицирован и продемонстрировал свою способность захватывать воздушную цель, фиксировать ее местоположение по азимуту, а затем сканировать по возвышению для определения высоты целей. Если точность высоты считается недостаточной, для определения угла возвышения можно использовать точность дальности и барометрическую высоту UAS 2602. Когда радиолокатор не используется для настройки PILS, его можно использовать для обеспечения безопасности периметра вокруг аэродрома.
[00171] В настоящее время существуют коммерческие системы LTS, которые предназначены для взаимодействия с наземными станциями UAS. Это позволяет LTS получить запрограммированное и/или контролируемое местоположение UAS 2602. Зная примерное местоположение UAS 2602 через наземную станцию управления, LTS может перенаправляться к приблизительному местоположению и инициировать процедуру поиска, определить местоположение UAS и начать отслеживать его точное местоположение по возвышению.
[00172] Третьим потенциальным вариантом является использование системы на основе приемоответчиков для определения дальности до UAS 2602. Система многопозиционного наземного наблюдения ADS-B (MAGS) использует расширенный сквиттер режима S (1090ES) и ADS-B, когда она доступна. Технологию MAGS можно использовать для опроса приемника MAGS в UAS 2602. Это будет похоже на вторичный обзорный радиолокатор, но значительно проще, поскольку опросчик будет всенаправленным, а измерению подвергается только дальность до UAS 2602.
КОМПЛЕКСНАЯ КАЛИБРОВКА, ВЫПОЛНЯЕМАЯ БЕЗ УЧАСТИЯ ЧЕЛОВЕКА
[00173] Как описано выше, когда навигационное средство устанавливается или модифицируется, оно должно быть откалибровано с использованием бортового оборудования. Традиционно для этого требуется пилот и/или экипаж в самолете, а также техник на земле. Пилот/экипаж использует радиосвязь, чтобы сообщить о требуемых изменениях сигнала в пространстве наземному технику, который затем вручную изменяет параметры системы, чтобы изменения вступили в силу.
[00174] Во время настройки нового установленного навигационного средства систему необходимо отрегулировать для соответствующей площадки и установки, чтобы откалибровать излучаемые сигналы для их соответствия применяемым стандартам. Как описано выше, ILS состоит из курсового радиомаяка, обеспечивающего боковое наведение относительно центральной линии взлетно-посадочной полосы, и глиссадного радиомаяка, обеспечивающего вертикальное наведение вдоль желаемой траектории захода на посадку. Информация наведения является результатом различной глубины модуляции (разница в глубине модуляции - DDM) амплитудно-модулированных тонов 90 Гц и 150 Гц для несущей, излучаемой антенной решеткой. Для сигналов курсового радиомаяка широковещательно передается амплитудно-модулированный код Морзе, т.е. сигнал идентификации. Различные элементы антенны решетки передают несущую, которая по-разному модулируется тонами на каждую антенну. С правой стороны решетки курсового радиомаяка (в направлении захода на посадку, обращенном к взлетно-посадочной полосе) преобладает частота 150 Гц, а елевой стороны преобладает тон 90 Гц. Для глиссадного радиомаяка преобладает тон 150 Гц при полете ниже вертикальной траектории (т.е. пилот должен «лететь вверх»), а тон 90 Гц преобладает при полете выше вертикальной траектории (т.е. пилот должен «лететь вниз»). Точно на центральной линии взлетно-посадочной полосы (или на желаемой вертикальной траектории, т.е. 3°) оба тона принимаются с одинаковой амплитудой, а разница в модуляции равна нулю. Разность модуляций становится отличной от нуля в стороне от номинальной траектории, поскольку изменяется пространственная модуляция принятого поля.
[00175] Несущая частота для курсового радиомаяка находится в диапазоне частот приблизительно от 108 МГц до 112 МГц и приблизительно от 329 МГц до 335 МГц для глиссадного радиомаяка. Отдельные элементы антенны решеток курсового радиомаяка и глиссадного радиомаяка подключены через блок распределения к одному передатчику для каждого из курсового радиомаяка и глиссадного радиомаяка. Калибровка ILS включает:
• Установку несущей частоты.
• Установку амплитуды сигнала несущей.
• Установку амплитуды модулированного сигнала на каждом элементе антенны посредством аттенюатора.
• Установку фазы модулированного сигнала путем регулировки длины кабеля.
• Для вертикального глиссадного радиомаяка: установку Reference/Radio Datum Height (RDH) через высоту и расстояние между элементами антенны.
[00176] Эта процедура включает механическую работу по регулировке положения антенны и длины кабеля. Описанная здесь концепция PILS обеспечивает простой инструмент, поддерживающий полную комплексную автоматическую калибровку благодаря генерации сигнала на каждом отдельном излучающем элементе решеток GP и LOC. Портативные системы посадки по приборам (PILS) обеспечивают сигнал ILS в пространстве (SiS) в соответствии с требованиями конвенции ИКАО и удовлетворяют потребность военного применения в компактных, легких, быстро и легко развертываемых системах посадки по приборам (ILS) категории I, соответствующих требованиям конвенции ИКАО, с характеристиками, достаточными для выполнения точных заходов на посадку до категории I (CAT I). Это обеспечивает обычную ILS SiS и состоит в основном из тех же основных радиочастотных излучающих элементов, что и обычная ILS, а именно:
• Курсовой радиомаяк, LOC, обеспечивающий сигнал в диапазоне от 108 до 118 МГц, модулированный частотой 90 Гц и 150 Гц для формирования DDM, как у обычной ILS. Также рассматривается возможность голосовой и IDENT-модуляции.
• Глиссадный радиомаяк, GS, обеспечивающий сигнал в пространстве приблизительно в диапазоне от 328,6 до 335,4 МГц, модулированный частотами 90 Гц и 150 Гц для формирования DDM, как у обычной ILS.
[00177] Кроме того, это обеспечивает системы выдачи команд и управления, CCS, для контроля рабочего состояния и условий, а также подсистемы настройки, позволяющие автоматически настраивать PILS. Автоматическая настройка осуществляется в виде контура обратной связи для калибровки SiS в сочетании с дроном настройки, TD, и системами эталонного позиционирования дрона. В некоторых ситуациях в сочетании с дроном настройки также можно использовать FCR, если это необходимо. Местоположение дрона и принятый DDM используются для выравнивания излучающих элементов LOC и GS таким образом, чтобы получить DDM вдоль траектории полета, что соответствует предполагаемой схеме захода на посадку.
[00178] Описанное здесь решение PILS может использовать следующие ключевые элементы:
• Легкие, компактные подсистемы курсового радиомаяка, использующие приемопередатчик SDR. SDR обеспечивают динамическую гибкость в малом корпусе, что позволяет реализовать характеристики традиционных антенных решеток посредством распределенной архитектуры, позволяющей управлять настройкой отдельных элементов антенны.
• Глиссаду без формирования изображения, использующую адаптивной сети формирования луча наземных антенн для обеспечения обычной глиссады ILS с использованием того же SDR, что и для курсового радиомаяка.
• Сложную механическую упаковку, обеспечивающую минимальное время установки и разборки.
• Автоматическую калибровку SiS по контуру обратной связи для быстрой калибровки систем.
[00179] Фиг. 32-34 иллюстрируют различные приведенные для примера конфигурации подсистемы выдачи команд и управления (CCS) 3200, связанной с подсистемой 3202 дрона настройки, с подсистемой 3204 курсового радиомаяка и с подсистемой 3206 глиссадного радиомаяка, в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Например, фиг. 32 иллюстрирует, что CCS 3200 содержит центральную систему 3208 обработки, контроля и локального управления PILS. Центральная система 3208 обработки, контроля и локального управления PILS содержит один или более процессоров CCS, которая контролирует состояние системы и обеспечивают локальное управление системой. Фиг. 32 также иллюстрирует, что CCS 3200 содержит центральный модуль 3210 интерфейса, который соединяет различные подсистемы PILS с множеством интерфейсов внутри CCS. CCS 3200 также содержит центральный модуль 3212 обработки, содержащий один или более процессоров CCS, и позволяющий запускать приложения для управления и просмотра различных аспектов PILS. Фиг. 32 также иллюстрирует, что CCS 3200 содержит центральный модуль 3214 контроля, который контролирует характеристики системы PILS.
[00180] Например, центральный модуль 3214 контроля может быть использован для оповещения пользователей об изменениях состояния системы и может быть использован для отключения компонентов системы, если работа становится небезопасной. Фиг. 32 также иллюстрирует, что CCS 3200 содержит локальный модуль 3216 управления, содержащий локальный интерфейс технического обслуживания, посредством которого пользователь может подключиться и получить полный контроль над системой PILS. Фиг. 32 также иллюстрирует, что CCS 3200 содержит модуль 3218 удаленного управления, который обеспечивает интерфейс, посредством которого персонал технического обслуживания, находящийся в удалении от аэродрома, будет подключаться к PILS. Различные подкомпоненты этого модуля описываются ниже со ссылкой на фиг. 33 и 34. CCS 3200 также содержит, как показано на фиг. 32, интерфейс 3220 АТС, посредством которого персонал управления воздушным движением (АТС) будет подключаться к PILS для приема статуса системы и ограниченного управления системой PILS.
[00181] Фиг. 32 также иллюстрирует приведенную для примера подсистему 3204 курсового радиомаяка, содержащая антенну LOC и ARU 1-8, которые содержат отдельные элементы антенны, связанные соответственно с отдельными ARU, как описано здесь, и составляющие антенную решетку LOC. Хотя подсистема 3204 курсового радиомаяка показана в качестве приведенной для примера 8-элементной антенной решетки, следует понимать, что решетка курсового радиомаяка может содержать большее или меньшее количество элементов антенны в зависимости от потребностей конструкции. Подсистема 3204 курсового радиомаяка также содержит центральный модуль 3222 обработки LOC (СРМ), содержащий один или более процессоров подсистемы 3204 LOC. СРМ 3222 обеспечивает канал связи от LOC к CCS, посредством которого LOC управляется либо вручную персоналом технического обслуживания, либо автоматически как часть E2EUC. СРМ 3222 распределяет команды по отдельным антеннам/ARU антенной решетки LOC. СРМ 3222 также предоставляет статус подсистемы LOC в CCS. В некоторых вариантах осуществления СРМ 3222 также содержит функцию контроля LOC. Фиг. 32 также иллюстрирует подсистему 3204 курсового радиомаяка, содержащую антенну NF-MON и ARU, работающую в качестве антенны контроля ближнего поля. Антенна контроля ближнего поля используется для приема SiS и подачи сигнала в контролирующую функцию LOC (в СРМ 3222 или СММ 3214) для постоянного контроля точности SiS и безопасности его использования.
[00182] Фиг. 32 также иллюстрирует глиссадную подсистему 3206, содержащую антенну GP и ARU 1-N, которые содержат отдельные элементы антенны, связанные соответственно с отдельными ARU, как описано в настоящем документе, составляющими антенную решетку GP. Глиссадная подсистема 3206 также содержит центральный модуль 3224 обработки (СРМ) GP, содержащий один или более процессоров глиссадной подсистемы 3206. СРМ 3224 обеспечивает канал связи от GP к CCS, посредством которого GP управляется либо вручную персоналом технического обслуживания, либо автоматически как часть E2EUC. СРМ 3224 распределяет команды по отдельным антеннам/ARU антенной решетки GP. СРМ 3224 также предоставляет статус подсистемы GP в CCS. В некоторых вариантах осуществления СРМ 3224 также содержит функцию контроля GP. Фиг. 32 также иллюстрирует глиссадную подсистему 3206, содержащую антенну NF-MON и ARU, работающую в качестве антенны контроля ближнего поля. Антенна контроля ближнего поля используется для приема SiS и подачи сигнала в контролирующую функцию GP (в СРМ 3224 или в СРМ 3214) для постоянного контроля точности SiS и безопасности его использования.
[00183] Фиг. 32 также иллюстрирует систему 3202 дрона настройки, содержащую настраиваемый БПЛА 3226 настройки, который содержит измеряющее средство 3228 БПЛА настройки. Измеряющее средство 3228 БПЛА настройки содержит оборудование, которое измеряет РЧ-сигналы от описанного здесь оборудования навигации и наблюдения. Фиг. 32 также иллюстрирует БПЛА 3226 настройки, содержащий канал 3230 передачи данных настройки БПЛА настройки, содержащий канал передачи данных, посредством которой информация об измерении (РЧ и, возможно, данные местоположения) передается между воздухом и землей. Фиг. 32 также иллюстрирует, что БПЛА 3226 настройки содержит канал 3232 передачи данных управления БПЛА настройки, содержащий канал передачи данных, посредством которой управляют местоположением дрона в пространстве. БПЛА 3226 настройки также содержит блок 3234 бортовой локализации БПЛА настройки, содержащий бортовое оборудование, которое используется для определения местоположения БПЛА в пространстве (например, но не ограничиваясь этим, барометрический высотомер), как показано на фиг. 32.
[00184] Фиг. 32 также иллюстрирует систему 3202 дрона настройки, содержащую блок 3236 наземного управление БПЛА настройки, включающий наземную станцию, с которой осуществляется управление местоположением дрона в пространстве. В одном варианте осуществления это может осуществляться путем удаленного управления, выполняемого пилотом. В другом варианте осуществления местоположение дрона в пространстве управляется CCS, как описано здесь. Фиг. 32 также иллюстрирует систему 3202 дрона настройки, содержащую блок 3238 наземной локализации БПЛА настройки, включающий наземное оборудование, которое используется для определения местоположения БПЛА в пространстве, как описано в настоящем документе (например, но не ограничиваясь этим, теодолит). Фиг. 32 также иллюстрирует систему 3202 дрона настройки, также содержащую канал 3240 передачи наземных данных в БПЛА настройки, содержащий канал передачи данных, посредством которой данные измерений и локализации передаются в/от БПЛА 3226 и, в свою очередь, в/от CCS 3200.
[00185] Фиг. 33 иллюстрирует, что CCS 3200 содержит, в некоторых вариантах осуществления, локальный интерфейс 3300 технического обслуживания, который содержит интерфейс, посредством которого персонал технического обслуживания, находящийся на аэродроме, будет подключаться к PILS, подобно локальному модулю 3216 управления, описанному выше. Фиг. 33 также иллюстрирует, что CCS 3200 содержит, в некоторых вариантах осуществления, интерфейс 3302 удаленного технического обслуживания, посредством которого персонал технического обслуживания, находящийся в месте, удаленном от аэродрома, будет подключаться к PILS, подобно модулю 3218 удаленного управления, описанному выше. Фиг. 33 также иллюстрирует, что CCS 3200 содержит, в некоторых вариантах осуществления, интерфейс 3304 FCR, посредством которого FCR может быть подключено к PILS, чтобы обеспечить удаленное управление и связь через FCR. Фиг. 33 также иллюстрирует подсистему 3204 курсового радиомаяка и глиссадную подсистему 3206, соответственно, содержащие интерфейсы 3306 и 3308 данных, которые позволяют пользователю извлекать зарегистрированные данные через CCS. Дополнительные подробности, касающиеся работы интерфейсов 3306 и 3308 данных, описаны ниже со ссылкой на фиг. 34А-С.
[00186] Фиг. 34А иллюстрирует подсистему 3204 курсового радиомаяка, содержащую, в некоторых вариантах осуществления, функцию 3400 локальной регистрации данных LOC, которая регистрирует внутреннюю конфигурацию и данные измерений. Это может быть подфункцией СРМ 3222. Интерфейс 3306 данных содержит интерфейс, посредством которого данные, зарегистрированные функцией 3400 локальной регистрации данных, могут быть извлечены пользователем через CCS 3200. CCS 3200 также может использоваться для конфигурирования того, какие данные регистрируются функцией 3400 локальной регистрации данных, а интерфейс 3306 данных будет использоваться для отправки этих команд конфигурации в функцию 3400 локальной регистрации данных.
[00187] Фиг. 34 В иллюстрирует глиссадную подсистему 3206, содержащую, в некоторых вариантах осуществления, функцию 3402 локальной регистрации данных GP, которая регистрирует внутреннюю конфигурацию и данные измерений. Это может быть подфункцией СРМ 3224. Интерфейс 3308 данных содержит интерфейс, посредством которого данные, зарегистрированные функцией 3402 локальной регистрации данных, могут быть извлечены пользователем через CCS 3200. CCS 3200 также может использоваться для конфигурирования того, какие данные регистрируются функцией 3402 локальной регистрации данных, а интерфейс 3308 данных будет использоваться для отправки этих команд конфигурации в функцию 3402 локальной регистрации данных.
[00188] Фиг. 34С иллюстрирует интерфейс 3300 локального технического обслуживания, который содержит, в некоторых вариантах осуществления, функцию 3404 локального управления техническим обслуживанием, содержащую интерфейс, посредством которого пользователь может подключиться и полностью управлять системой PILS. Фиг. 34С также иллюстрирует локальный интерфейс 3300 технического обслуживания, содержащий локальный блок 3406 регистрации данных, содержащий локальный интерфейс, посредством которого могут извлекаться данные, зарегистрированные различными подсистемами, и могут быть сконфигурированы параметры регистрации. Локальный интерфейс 3300 технического обслуживания также содержит, как показано на фиг. 34С, локальный индикатор 3408 состояния, содержащий локальный интерфейс, посредством которого состояние системы PILS и подсистем может подаваться для отображения. Фиг. 34С также иллюстрирует локальный интерфейс 3300 технического обслуживания, который также содержит интерфейс 3410 профилактического технического обслуживания, содержащий локальный интерфейс, к которому может быть подключено внешнее решение по профилактическому техническому обслуживанию для непрерывной регистрации и оценки данных системы для профилактического технического обслуживания.
[00189] Фиг. 34С также иллюстрирует интерфейс 3302 удаленного технического обслуживания, содержащий интерфейс 3412 управления удаленного технического обслуживания, посредством которого пользователь может подключиться и полностью управлять системой PILS. Интерфейс 3302 удаленного технического обслуживания также содержит, как показано на фиг. 34С, интерфейс 3414 удаленного индикатора состояния, содержащий интерфейс, посредством которого состояние системы PILS и подсистем может подаваться для отображения. Фиг. 34С также иллюстрирует, что CCS 3200 содержит, в некоторых вариантах осуществления, блок 3416 распределения данных CCS, содержащий промежуточный блок распределения, который соединяет различные подсистемы PILS с множеством интерфейсов внутри CCS 3200, описанных выше.
[00190] При установке навигационного средства выполняются наземные проверки для максимально точной настройки системы перед выполнением полетной проверки с воздуха. Однако наземных проверок недостаточно для полной настройки системы, поэтому всегда требуется полет для точной настройки сигнала в пространстве и ввода в эксплуатацию системы. Как описано выше, полетные проверки:
• Сложно планировать - очень немногие организации и летательные аппараты уполномочены проводить полетные проверки.
• Отнимают много времени - наземная команда должна ждать прибытия пилота. Когда пилоты делают необходимые перерывы, они должны выполнить посадку и снова взлететь.
• Очень дороги - наем экипажа и аренда самолета на несколько часов или дней обходятся дорого.
• Опасны при выполнении их в неблагоприятных условиях -при выполнении военных задач навигационное средство может быть развернуто в неблагоприятных условиях, где выполнение полетной проверки пилотируемым летательным аппаратом может быть рискованным.
[00191] Техник-человек на земле, вносящий изменения в систему, может потребовать, чтобы некоторые диаграммы проверялись в полете несколько раз для проверки изменений, что увеличивает время полета. Регулировки человека могут быть некорректными, что может увеличить время полета еще больше. Даже архитектура распределенного усилителя портативной системы посадки по приборам (PILS) может затруднить процесс ручной настройки.
[00192] Некоторые сценарии развертывания навигационного средства позволяют вводить навигационное средство в эксплуатацию без необходимости пилотируемой полетной проверки. Это может облегчить все неудобства, связанные с полетными проверками, перечисленные выше. Там, где для ввода в эксплуатацию по-прежнему требуется полетная проверка, комплексная калибровка, выполняемая без участия человека, (E2EUC) включает измерения, сделанные с воздуха, которые будут настраивать систему более точно, чем это можно сделать посредством одних полетных проверок. Это сократит время полетной проверки. Автоматическая настройка системы, выполняемая E2EUC, снижает или устраняет риск человеческой ошибки.
[00193] E2EUC вычисляет изменения параметров, необходимые для всех передающих элементов в навигационном средстве, независимо от того, имеется ли один передатчик, как в традиционном курсовом радиомаяке, или существует распределенная архитектура передатчика, как в PILS. Алгоритмы E2EUC, вероятно, могут вычислять необходимые изменения сигнала (сигналов) в пространстве быстрее и с меньшей ошибкой, чем человек-оператор. E2EUC автоматически выполнит проверку в воздухе, чтобы подтвердить изменения, внесенные в сигнал в пространстве. Кроме того, описанная здесь система E2EUC позволяет настраивать навигационное средство в неблагоприятных условиях без риска для жизни людей в воздухе.
[00194] Фиг. 35 иллюстрирует приведенную для примера структуру контура управления для настройки, с использованием контура обратной связи на основе дрона, системы 3500 навигационных средств, настраиваемой в соответствии с некоторыми вариантами осуществления. БПЛА 3502 настройки принимает излучаемый сигнал (сигнал в пространстве (SiS), генерируемый на этапе 3506) в конкретном местоположении (этап 3504). БПЛА 3502 настройки передает измерение в систему NAVAID для настройки 3500, где оно преобразуется в желаемые параметры измерения (этап 3508). Измеренные параметры затем сравниваются с желаемым сигналом (эталонное значение SiS 3510), и, если принятый сигнал отклоняется от желаемого, некоторые параметры системы регулируются для снижения этой разницы до нуля (этап 3512). Модуль 3518 управления местоположением БПЛА настройки сравнивает желаемое местоположение 3516 с текущим местоположением 3514 и выдает команду на изменение местоположения БПЛА 3502 настройки до тех пор, пока ошибка не снизиться до нуля.
[00195] Контур управления местоположением связан с контуром управления сигналом. Желаемый сигнал связан с местоположением функциональным соотношением. Для ILS это функциональное соотношение определяется разницей в глубине модуляции (DDM) по углу (по горизонтали и по вертикали). Результирующая DDM показывает функциональное соотношение с параметрами сигнала (амплитудой и фазой несущей и амплитудно-модулированных тонов). Для управления местоположением дрона, необходимо определить фактическое местоположение дрона и подать его обратно в контур управления местоположением.
[00196] Описанная здесь система E2EUC предлагает быструю и дешевую настройку и калибровку навигационного средства. Система E2EUC может применяться в конкретной реализации ILS, обеспечивая расширенные возможности настройки по сравнению с обычными конструкциями (например, PILS). Система E2EUC также может применяться к обычным системам навигации и наблюдения. Преимущество E2EUC заключается в том, что система значительно сокращает усилия по ручной настройке.
[00197] Описанная здесь система E2EUC обеспечивает контур управления с обратной связью для выполнения измерения качества системы навигации/системы наблюдения посредством дрона, которого можно гибко и точно разместить в предполагаемом объеме покрытия системами навигации/наблюдения. Дрон выполнен с возможностью делать измерения качества сигнала и передачу их в наземную систему, которая способна активно настраивать параметры сигнала на основе данных, принятых от измеряющего дрона. Этот процесс выполняется системой E2EUC до тех пор, пока не будет достигнуто качество сигнала в заданных пределах калибровки.
[00198] В соответствии с некоторыми вариантами осуществления процесс настройки включает определение желаемого сигнала в точке измерения в пространстве (например, эталонное значение 3516 местоположения, проиллюстрированное на фиг. 35) и выдачу команды дрону желаемого местоположения. Фактическое положение дрона определяется путем измерения местоположения беспилотного летательного аппарата (БПЛА) настройки. Измерение местоположения обычно может выполняться в воздухе с использованием средств, установленных на дроне. Но это можно делать и с земли. Процесс настройки может включать вычисление разницы между фактическим местоположением дрона и желаемым местоположением дрона и определение команд управления для снижения отклонения местоположения посредством модуля 3518 управления местоположением БПЛА настройки в соответствии с некоторыми вариантами осуществления.
[00199] В некоторых вариантах осуществления, когда отклонение местоположения находится в определенном пределе (например, близко к нулю), запускается измерение сигнала, и измерение выполняется посредством измеряющего средства 3504 БПЛА настройки. Измеренный сигнал сравнивается с желаемым сигналом эталонного значения 3510 SiS. Если существует отклонение, измерение передается в параметр калибровки посредством контроллера 3512 сигнала, показанного на фиг. 35. Контроллер 3512 сигнала адаптирует соответствующий параметр в блоке 3506 генерирования сигнала. Процесс измерения сигнала и адаптации параметра выполняется до тех пор, пока отклонение между измеренным сигналом и желаемым сигналом не будет находиться в определенных пределах (например, близко к нулю).
[00200] Когда сигнал установлен в конкретном местоположении, в некоторых вариантах осуществления будет дана команда занять следующее местоположение. Процесс повторяется до тех пор, пока принимаемый сигнал во всех местоположениях не будет соответствовать желаемому сигналу. Следует отметить, что контур управления местоположением не зависит от контура управления SiS. Оба контура управления связаны только посредством эталонных значений для SiS и местоположения. Альтернативной процедурой может быть поиск местоположения нулевого SiS (т.е. DDM) и настройка системы на желаемое значение там.
[00201] Описанный выше процесс настройки применим для настройки излучаемого сигнала и настройки контроля наземного сигнала. В зависимости от реализации функций, на земле или в воздухе могут выполняться следующие функции:
• Измерение местоположения БПЛА настройки.
• Определение эталонного значения SiS.
• Определение эталонного местоположения.
[00202] Во всем данном раскрытии описывается включение E2EUC в портативную систему посадки по приборам (PILS). Основная цель PILS заключается в предложении компактной системы посадки по приборам (ILS), которая является портативной и может быть очень быстро установлена или демонтирована небольшой командой. Тем не менее, E2EUC может быть расширена для работы с другими портативными/развертываемыми навигационными средствами и средствами наблюдения, а также может быть адаптирована к традиционным стационарным навигационным средствам. В их число входят ILS, всенаправленный радиомаяк ОВЧ диапазона (VeryHHigh-Frequency Omni-Range, VOR), тактическая аэронавигацонная система (Tactical Air Navigation, TACAN), дальномерное оборудование (Distance Measuring Equipment, DME), многопозиционная система наблюдения (Multilateration, MLAT) и радиолокатор. Принцип настройки (D)VOR с контуром обратной связи включает измерение азимута, индексов модуляции и частот модуляции. Принцип настройки TACAN включает настройку только смещения по азимуту.
[00203] Согласно некоторым вариантам осуществления, E2EUC объединяет концепцию использования БПЛА для выполнения проверки SiS (и, возможно, полетной проверки) навигационного средства с концепцией использования БПЛА для настройки системы навигационных средств. Результатом является комплексный автоматизированный процесс настройки, при котором БПЛА летит в желаемое местоположение, измеряет SiS и передает измерения обратно в систему выдачи команд и управления (CCS) PILS. В свою очередь, CCS оценивает измерения и командует ILS модифицировать SiS до тех пор, пока БПЛА не измерит приемлемый SiS.
[00204] В обычной ILS процесс настройки может поддерживаться дроном и соответствующей обратной связью в степени установки параметров сигнала, конфигурируемых электронными средствами, т.е., как правило, для следующих параметров передатчика (дополнительная информация будет приведена ниже): амплитуда сигнала, амплитуда модулированного сигнала (SBO, CSB) и общая фаза модулированных сигналов. То же самое относится и к контролю: обычно можно сконфигурировать пределы контроля для каждого приемника (встроенный, ближнего поля, дальнего поля).
[00205] Обычная ILS использует несколько излучающих элементов на курсовой радиомаяк и глиссадный радиомаяк. Обычно они подключаются к соответствующим передатчикам для всего курсового радиомаяка и глиссадного радиомаяка, соответственно. Поскольку настройка для обычной ILS ограничена настройкой каждого передатчика, можно одновременно повлиять только на общее поле. Кроме того, настройки контроля можно регулировать с использованием дрона. Таким образом, настройка на основе дрона в первую очередь будет поддерживать повторную калибровку. Преимущество по сравнению с современным принципом заключается в том, что можно добраться до любого произвольного местоположения.
[00206] При настройке PILS базовый принцип установки параметров сигнала для каждого передатчика применим и для PILS. Поскольку каждый излучающий элемент подключен к своему передатчику, степеней свободы становится больше. Калибровка контроля аналогична калибровке для обычных систем. Встроенный контроль может быть выполнен для каждого элемента антенны и, таким образом, с большей степенью свободы.
[00207] Повышенная степень свободы в калибровке усовершенствованной концепции PILS усложняет процесс настройки и калибровки, как будет более подробно объяснено ниже. В соответствии с некоторыми вариантами осуществления процедура настройки системы PILS может включать:
ο Загрузку предварительной конфигурации: ожидаемые параметры настройки могут быть получены от инструмента, который также служит для проектирования решетки, когда условия площадки (уклон и т.д.) находятся в
• ->начальной конфигурации, которая отклоняется от «идеальной» по умолчанию, поскольку уже учитываются аспекты площадки.
ο Настройку/калибровку LOC на земле:
• Обеспечение надлежащей синхронизации: выполняется внутри LOC/GP.
• Измерение каждой антенны отдельно, чтобы проверить соответствие ожидаемому и заранее заданному значению.
• Измерение нуля SBO на центральной линии: регулируются отдельные антенны, как указано в измерении в соответствии с описанием параметра.
• Настройка ширины курсового радиомаяка путем измерения при боковом смещении площадок.
• Настройка сигнала клиренса (если существует).
• Проверка затухания сигнала вне зоны покрытия, о Настройку/калибровку GP:
• Обеспечение надлежащей синхронизации: выполняется внутри LOC/GP.
• Измерение каждой антенны отдельно, чтобы проверить соответствие ожидаемому и заранее заданному значению.
• Нуль SBO при желаемом GPA: настройка, как указано в измерении в соответствии с описанием параметра.
• Нуль SBO при боковом смещении.
• Проверьте ширину по вертикали.
• Настройка сигнала клиренса (если существует).
[00208] Контур управления позиционированием (PCL) управляется, в некоторых вариантах осуществления, подсистемой настройки и включает подсистемы PILS - CCS и TD. CCS управляет желаемым эталонным местоположением дрона в соответствии с фактической потребностью измерения. Фактическая потребность измерения вытекает из процедуры калибровки.
[00209] Одним из наиболее сложных аспектов выполнения процесса настройки PILS является точное знание местоположения дрона в пространстве. В одном варианте осуществления, когда сигналы GPS/GNSS доступны и дополнены дифференциальной системой GPS или системой передачи дифференциальных поправок широкого радиуса действия (WAAS), требуемая точность может быть легко достигнута. Этого можно добиться, путем оснащения дрона приемниками GPS/GNSS и ILS, измерения соответствующих сигналов в пространстве (SiS), и надежной передачи их в подсистему выдачи команд и управления (CCS) PILS. Затем CCS будет анализировать данные и вычислять фазовые и амплитудные корректирующие коэффициенты антенны, необходимые для корректировки SiS. Затем коэффициенты будут отправлены в элементы антенны курсового радиомаяка (LOC) и глиссадного радиомаяка (GS) и скорректированы.
[00210] Однако в условиях отсутствия сигналов GPS/GNSS определить местоположение дрона в пространстве гораздо сложнее. Требования к точности местоположения обусловлены полетами, необходимыми для настройки PILS, а также дистанциями и угловыми положениями относительно фазовых центров антенн LOC и GS. Поскольку планируется использовать октокоптер DoD группы 2, измерения будут проводиться на гораздо более коротких дистанциях, чем традиционные полетные проверки. Однако эти измерения будут пригодны для первоначальной настройки и будут выполняться в регионах, где диаграммы направленности радиочастотных антенн LOC и GS полностью сформированы.
[00211] Чтобы оценить требования к точности, полезно определить некоторые эталонные точки из приложения 10 конвенции ИКАО для захода на посадку категории I. Фиг. 36 иллюстрирует вид сверху приведенного для примера захода на посадку с этими эталонными точками. Следующие области являются примерными регионами, представляющими особый интерес:
• Точка А. Воображаемая точка на LOC/GS на курсе, расположенная в 4 морских милях (7,4 км) от порога взлетно-посадочной полосы, как измеренная вдоль удлиняющейся центральной линии взлетно-посадочной полосы.
• Точка В. Воображаемая точка на LOC/GS на курсе, расположенная в 3500 футах (1065 м) от порога взлетно-посадочной полосы, как измеренная вдоль удлиняющейся центральной линии взлетно-посадочной полосы.
• Точка С. Точка, через которую проходит удлиненный вниз прямой участок угла входа GS на высоте 100 футов (30,5 м) над удлиняющейся горизонтальной плоскостью, содержащей порог взлетно-посадочной полосы. Предполагая, что угол входа глиссады составляет 3°, а точка посадки находится в 300 м от порога, тогда точка С расположена в 282 м от порога и в 582 м от точки посадки.
• Пороги (порог) взлетно-посадочной полосы представляют собой маркировку поперек взлетно-посадочной полосы, которая обозначает начало и конец обозначенного места для посадки и взлета в неаварийных условиях.
• Точка посадки (не показана) представляет собой пересечение угла глиссады с поверхностью взлетно-посадочной полосы и является точкой первого контакта с взлетно-посадочной полосой.
[00212] Фиг. 37 показывает чувствительность смещения DDM для LOC. На курсе LOC, т.е. на центральной линии взлетно-посадочной полосы и на удлиняющейся центральной линии, DDM почти равен нулю, линейно увеличиваясь вправо и влево от центральной линии к значению 0,155 DDM (150 мкА). Границы, созданные в этих точках, определяют ширину сектора курса LOC, обозначенную буквой «А» на фигуре, и обычно она меньше или равна 6 градусам. От краев сектора курса LOC до ±35° DDM будет линейно возрастать до 0,180. После достижения DDM значения 0,180, DDM должна сохранить это значение или стать >0,180.
[00213] Следует отметить, что во всем данном раскрытии будет использоваться взлетно-посадочная полоса длиной 4000 м с отступом LOC на 300 м от конца взлетно-посадочной полосы и углом глиссады в 3 градуса с отступом на 300 м от порога, чтобы продемонстрировать операции способов и систем в соответствии с вариантами осуществления, описанными ниже в данном документе. Таким образом, следует понимать, что точности и отклонения будут различаться для разных взлетно-посадочных полос, отступов и углов глиссады.
[00214] Первым этапом процесса является определение требования к точности курса LOC, как показано на фиг. 38. Точность курса LOC для захода на посадку по категории I у порога взлетно-посадочной полосы составляет ±35 футов (10,5 м) или в линейном эквиваленте 0,015 DDM, в зависимости оттого, что меньше. В этом случае отклонение угла задается следующим образом:
Ф (Приложение 10 конвенции ИКАО)=±Таn-1 (10,5 м/4300 м)=±0,140°.
[00215] Более короткие взлетно-посадочные полосы привели бы к большим отклонениям угла. В процессе настройки отклонение курса LOC должно быть в пределах ±0,3 м, как указано в ссылке 1, приведенной ниже. Отклонение курса LOC в градусах определяется следующим образом:
Отклонение курса LOC (град.)=±Таn-1(0,3 м / 4300 м)=±0,004°.
[00216] Кроме того, учитывая, что здесь 0,00145 DDM/м и 0,155 DDM эквивалентны 150 мкА, отклонение курса в мкА задается как: Отклонение курса LOC (мкА)=0,3 м х 0,00145DDM/m х 150 мкА / 0,155DDM=0,42 мкА.
[00217] Фиг. 39 иллюстрирует соотношение между длиной взлетно-посадочной полосы и отклонением ширины курса LOC. Следующим шагом является определение номинальной ширины сектора курса (CSW) LOC и связанного с ней отклонения на выравнивание. Фиг. 40 иллюстрирует, что CSW LOC является функцией длины взлетно-посадочной полосы. На основе номинальной половины CSW в 350 футов (107 м) в плоскости X-Y у порога взлетно-посадочной полосы, половина CSW LOC задается выражением:
β (Приложение 10 конвенции ИКАО)= Таn-1 (107 м / 4300 м)=1,42°.
[00218] Следовательно, CSW LOC задается выражением:
CSW LOC (Приложение 10 конвенции ИКАО)=2 х (3=2 х 1,42°=2,84°
[00219] В процессе настройки отклонение CSW LOC должно быть в пределах±3% от CSW, как описано в ссылке 1, и которое в градусах определяется как:
Отклонение CSW LOC (град.)=±2,84° х 0,03=±0,0852°,
[00220] которое эквивалентно
отклонению CSW LOC (м)=±4300 м х Таn (0,0852°)=±6,4 м
[00221] Таким образом, отклонение CSW LOC в мкА задается выражением:
Отклонение CSW LOC (мкА)=6,4 м х 0,00145DDM/m х 150 мкА /0,155DDM=9,0 мкА
[00222] Фиг. 41 иллюстрирует соотношение между длиной взлетно-посадочной полосы и отклонением ширины сектора курса LOC. Сводная информация об отклонениях ширины сектора и курса LOC для взлетно-посадочной полосы длиной 4000 м с отступом 300 м представлена в таблице 1.
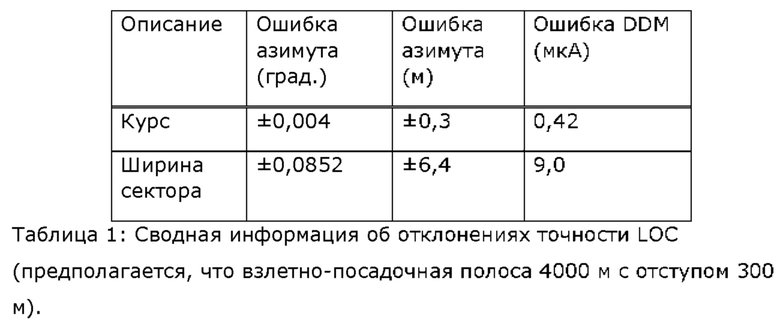
[00223] Настройка PILS на курс LOC может быть выполнена путем простого зависания дрона на 10-20 м над центральной линией взлетно-посадочной полосы у конца порога взлетно-посадочной полосы. Местоположение дрона должно управляться и измеряться с требованием по точности до ±0,3 м. Затем данные от приемника ILS дрона могут быть собраны и переданы в CCS для регулировок фазы элемента антенны LOC. В соответствии с таблицей 1 необходимо было бы довести DDM до значения менее 0,42 мкА.
[00224] После того, как автоматические регулировки антенны были выполнены для обнуления DDM, дрон может летать по вертикальному профилю непосредственно над центральной линией в качестве окончательной проверки профиля возвышения курса LOC. Чтобы соответствовать зоне покрытия GS, которая измеряется относительно точки посадки и охватывает примерно до 7°, дрон может летать по вертикальному профилю от поверхности взлетно-посадочной полосы до 40 м над центральной линией над порогом.
[00225] Кроме того, необходимо проверить SiS LOC в диапазоне ±35°. В этом диапазоне азимута DDM должен линейно изменяться от нуля до 0,155 в CSW LOC, а затем от него до 180 мкА. Как только DDM достигает 180 мкА, он должен оставаться на этом уровне или выше в пределах местоположений по азимуту ±35°. Чтобы проверить это в пределах ограничений полета дрона, дрон должен лететь близко к LOC, но в регионе, где диаграмма направленности луча полностью сформирована. Этого можно добиться, путем зависания над центральной линией в конце взлетно-посадочной полосы в 300 м от LOC, а затем пролетев перпендикулярно центральной линии ±210 м.
[00226] Приложение 10 конвенции ИКАО определяет угол глиссады (GPA) θ как угол входа. GPA должен быть отрегулирован на ±0,075θ для захода на посадку по категории I, как показано на фиг. 42. Если предположить, что θ=3,0°, отклонение угла для этого случая задается как:
Отклонение GPA (ИКАО)=±0,075 х 3°=±0,225°.
[00227] В процессе настройки GPA должен быть отрегулирован в пределах ±0,75% от GPA, как описано в ссылке 1, эта регулировка задается выражением:
Отклонение GPA (град.)=±3° х 0,0075=±0,0225°.
[00228] Фиг. 43 отображает соотношение между отклонением GPA и GPA. Для глиссады номинальная чувствительность к смещению угла должна соответствовать DDM 0,0875 при смещении угла выше и ниже глиссады на 0,129, как показано на фиг. 44. При условии, что GPA θ=3°, ширина сектора задается как:
Ширина сектора глиссады (GPSW)=2 х 0,12 х 3°=0,72°.
[00229] Поскольку DDM линейно возрастает от нуля при GPA до 0,0875 при половине ширины сектора 3,36°, соотношение между DDM и градусами задается как:
DDM/град.=0.0875DDM / (0,36 град.)=0,243DDM / град.
[00230] и, поскольку DDM 0,175 эквивалентен 150 мкАдля GP, отклонение в единицах мкА следующее:
Отклонение GPA (мкА)=0,0225° х 0,243DDM/град. х 150 мкА / 0,175DDM=4,7 мкА.
[00231] Во время процесса настройки GPSW должна быть в пределах 2,5% от GPSW, как описано в ссылке 1, причем отклонение GPSW задается как:
Отклонение GPSW (град.)=±0,72° х 0,025=±0,018°
Отклонение GPSW (мкА)=0,018° х 0.243DDM/град. х 150 мкА / 0,175DDM=3,75 мкА
Фиг. 45 иллюстрирует соотношение между отклонением ширины сектора GPA и GPA при предполагаемом отступе на 300 м от порога. В таблице 2 и таблице 3 приведены максимально допустимые ошибки для GPA (3°) и взлетно-посадочной полосы длиной 4000 м. Следует отметить, что GPA измеряется в точке посадки, которая находится примерно в 300 м от порога.
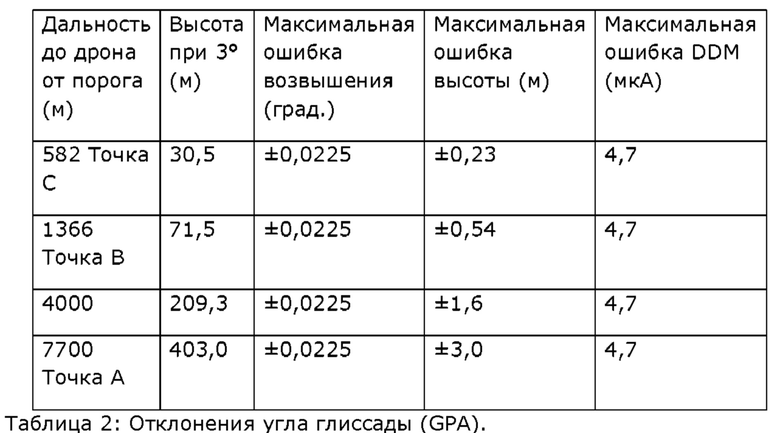
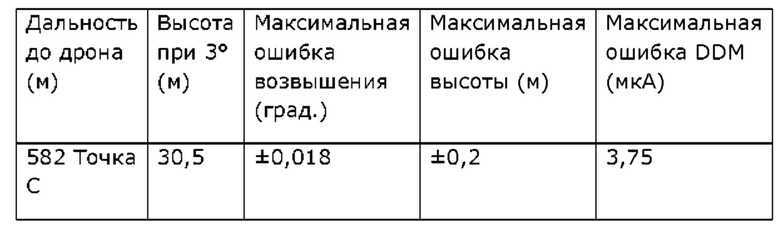
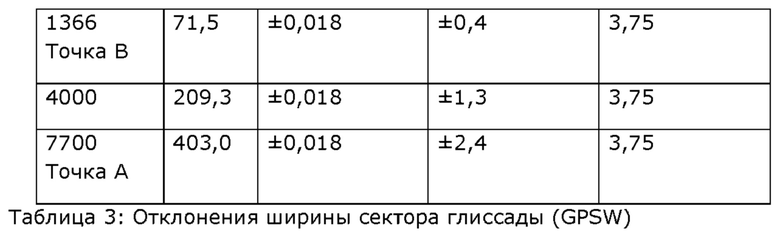
[00232] Фиг. 46 иллюстрирует соотношение между максимальным отклонением высоты (м) и GPA (градусы) для различных дальностей (м) отточки посадки. Чтобы пролететь через желаемый диапазон углов возвышения для измерения азимутального региона GPA, GPSW и GP, требуется серия полетов. Первый шаг представляет собой настройку GPA (3°), по сути, путем парковки дрона на расстоянии 4000 м отточки посадки на удлиненной центральной линии взлетно-посадочной полосы на высоте 209 м над плоскостью X-Y удлиненной взлетно-посадочной полосы. Из таблицы 2 видно, что отклонение измерения угла в этом местоположении составляет ±0,0225°, что приводит к максимальной ошибке измерения ±1,6 м по высоте или размерности Z. Поскольку дрон оснащен приемником ILS, способным измерять сигналы LOC и GP, данные обоих SiS могут быть отправлены одновременно. Используя эти данные и зная местоположение дрона в пределах отклонений, можно одновременно измерить точности LOC и GP. Отклонение курса LOC в этом диапазоне задается как:
Отклонение курса LOC (м)=±8000 м х Tan (0,004)=±0,56 м.
[00233] Пока дрон находится в этом диапазоне, дрон может летать по вертикальному профилю, чтобы пролететь через диапазон углов сектора GP, как показано на фиг. 47. Например, если дрон опускается до высоты 50 м относительно удлиненной плоскости X-Y взлетно-посадочной полосы, а затем наберет высоту 450 м, он будет пересекать углы GP от 0,72° до 6,42°, что достаточно для характеристики сигнала GP по интересующим углам. Из таблицы 2 максимальное отклонение ошибки измерения составляет ±1,6 м по высоте или размерности Z.
[00234] Другой способ выполнить пролет через желаемое угловое пространство состоит в том, чтобы дрон завис на заданной высоте над центральной линией порога взлетно-посадочной полосы, а затем дрон полетел на этой высоте в пределах досягаемости по удлиненной центральной линии, при поддержании этой высоты относительно удлиненной плоскости X-Y взлетно-посадочной полосы. Фиг. 48 иллюстрирует приведенные для примера результирующие углы возвышения к местоположению дрона для различных профилей высоты. Например, если дрон зависает на 100 м над порогом, а затем летит на дальность 1000 м, угол GS будет равен 5,74°. По мере того, как дрон удаляется вдоль удлиненной центральной линии взлетно-посадочной полосы, угол продолжает уменьшаться. На высоте 4000 м отточки посадки угол к дрону составит примерно 1,43°. Можно было бы сделать несколько «разрезов» по возвышению путем удаляющегося полета дрона на одной высоте, а затем поднимая высоту на другой уровень для обратного полета.
[00235] Окончательный набор настраивающих полетов может быть выполнен для проверки размеров азимута и возвышения GP и LOC в точке 4000 м. В этом случае желательно одновременно тестировать сигналы LOC и GP. Это может быть достигнуто путем полета по диаграмме пересечения, как показано на фиг. 49. Полет по этой диаграмме позволяет дрону захватывать и сообщать данные как от LOC, так и от GP, с разных азимутов и возвышений. Для угла глиссады в 3°, размеры возвышений равны от 0,76θ=2,28° до 1,24θ=3,72°. Размер азимута определяется половиной ширины сектора LOC±β, что в случае взлетно-посадочной полосы длиной 4000 м с отклонением на 300 м составляет 1,42°.
[00236] Следующие описанные полеты дрона используются для настройки и проверки характеристик курсового радиомаяка. Зависание дрона на 10-20 м над центральной линией взлетно-посадочной полосы у конца порога взлетно-посадочной полосы и регулировка диаграммы антенны LOC используются, чтобы максимально приблизить DDM к нулю, но менее 0,42 мкА. Пока дрон висит над центральной линией взлетно-посадочной полосы у порога, используется пролет дроном вертикального профиля от нуля до 40 м, чтобы проверить диаграмму возвышения LOC. Затем, когда дрон висит над центральной линией взлетно-посадочной полосы у порога на 10-20 м, используется полет дрона перпендикулярно центральной линии в одну сторону от взлетно-посадочной полосы на 107 м. Далее, когда дрон зависнет в этой точке, используется регулировка DDM как можно ближе к 0,155 (150 мкА). Используйте повторение этого на противоположной стороне. Затем снова используется пролет дроном всей длины пути, чтобы проверить, что SiS изменяется линейно от центральной линии до краев сектора LOC.
[00237] Кроме того, необходимо проверить SiS LOC в диапазоне ±35°. В этом диапазоне азимута DDM должен линейно изменяться от нуля до 0,155 в CSW LOC, а затем от него до 180 мкА. Как только DDM достигает 180 мкА, он должен оставаться на этом же уровне или выше него в диапазоне местоположений по азимуту ±35°. Чтобы проверить это в пределах ограничений полета дрона, дрон должен лететь близко к LOC, но в регионе, где диаграмма направленности луча полностью сформирована. Этого можно добиться путем зависания над центральной линией в конце взлетно-посадочной полосы в 300 м от LOC, а затем путем пролета ±210 м перпендикулярно центральной линии.
[00238] Следующие полеты дрона используются для настройки и проверки характеристик глиссады. Дрон летит к точке 4000 м вдоль удлиненной центральной линии взлетно-посадочной полосы на высоте 209 м над удлиненной плоскостью X-Y взлетно-посадочной полосы. Измеряется и регулируется DDM как можно ближе к нулю, но менее 4,7 мкА для GPA (3°). Измеряются сигналы GPA и LOC для проверки SiS. На 4000 м дрон летает по вертикальному профилю от 50 м до 450 м, чтобы пройтись по углам от 0,72° до 6,42°, измеряя диаграмму возвышения GP. Дрон зависает на 100 м над центральной линией взлетно-посадочной полосы у порога, а затем дрон летает на этой высоте над удлиненной плоскостью X-Y взлетно-посадочной полосы в пределах досягаемости, чтобы пройти через интересующие углы GP. Можно было бы сделать несколько «разрезов» по возвышению путем удаляющегося полета дрона на одной высоте, а затем поднимая высоту на другой уровень для обратного полета.
[00239] Приемник ILS дрона должен быть способен точно измерять несколько ключевых параметров. Это список параметров и связанных с ними точностей, необходимых для проведения необходимых регулировок диаграмм направленности антенн LOC и GS PILS.
• Уровень РЧ-сигнала ±0,1 дБ
• Разница в глубине модуляции (DDM) ±0,05% (0,5 мкА)
• Сумма глубин модуляции ±0.1%
• Идентификационная модуляция ±0.1%
• Идентификационный код
• Точки измерения GP (номинальное покрытие применимо к ILS, уменьшенное покрытие применимо к PILS):
- Az=О, GPA=3
- Az=О, GPA=3.x
- Az=О, GPA=2.у
- Az=-8 (-6), GPA=3
- Az=-8, GPA=3.x
- Az=-8, GPA=2.у
- Az=+8 (+6), GPA=3
- Az=+8, GPA=3.x
- Az=+8, GPA=2.у
- Расстояние для этих измерений составляет, например,4 км.
• Точки измерения LOC: как для GP, но с охватом азимута 35°.
[00240] В среде GPS одновременная настройка LOC и GP может быть выполнена посредством двухканального приемника. В среде, в которой отсутствует GPS, подсистемы будут настроены последовательно. В этих условиях LOC будет настроен первым путем размещения двухканального приемника в заранее заданных местоположениях на земле. После этого будет настроен GP. Для направления дрона с использованием двухканального приемника может быть использован уже настроенный LOC, чтобы направлять дрон в боковом направлении. Опционально, вертикальное направление и направление вдоль траектории будут обеспечиваться другими источниками. Сюда могут входить измерения дальности с использованием канала передачи данных в дрон и измерения высотомера с использованием дифференциальных барометрических принципов.
[00241] Настройка сигнала передачи ILS в пространстве, особенно учитывая возможность новой активной распределенной системы независимо настраивать отдельные элементы антенны описана ниже. В отличие от традиционной ILS, в которой сигнал в пространстве создается посредством дистанционно программируемого передатчика+стационарным блоком распределения+набором обрезанных РЧ-кабелей, новая система состоит из центрального блока+набора независимых антенных блоков, в которой центральный блок и каждый антенный блок могут быть запрограммированы удаленно в полевых условиях.
[00242] Во время установки в полевых условиях оператор 5002, который уже имеет опыт работы с текущей системой, будет иметь возможность настроить сигнал в пространстве путем задания передатчику центрального блока 5000, показанному на фиг. 50, настроек, влияющих на все антенны (такие как мощность CSB, амплитуда SBO, SDM, идентификационный тон и т.д.). Такие команды называются «общими настройками». В другом варианте осуществления передатчик центрального блока 5000 может содержать CCS 3200, показанный на фиг. 32-34, с использованием которого можно установить общие параметры с использованием ввода данных оператором или без него. Кроме того, посредством новой системы оператор сможет индивидуально устанавливать сигнал, создаваемый одной антенной (например, его фазу или амплитуду SBO), путем задания настроек центрального блока только для одной антенны. Такие настройки называются «индивидуальными настройками». Центральный блок 5000, когда принимает установки от оператора или CCS 3220, описанной выше, переводит эту настройку в одну или более «настроек антенны» для антенного радиоблока(ов) 1-N в соответствии со специальной обработкой, которая также должна учитывать правильное распределение сигналов к антеннам.
[00243] Таблица 5004 коэффициентов решетки, записанная в памяти, размещенной в центральном блоке 5000, содержит распределение коэффициентов решетки (амплитуда и фаза CSB и SBO, как для курса, так и для клиренса). Это практически замена блока распределения, который используется центральным блоком 5000 для программирования каждого антенного блока 1-N соответствующим сигналом. Каждая «настройка антенны» будет результатом «общей настройки», взвешенной по «коэффициенту решетки», и, в конечном итоге, настроенной (в полевых условиях) путем «индивидуальной настройки» с использованием блока 5006 обработки настроек антенны. Индивидуальные настройки предназначены для коррекции коэффициентов антенны, поэтому все их значения по умолчанию будут одинаковыми, поскольку распределение антенны уже содержится в таблице 5004 решетки, а среда считается идеальной в начале настройки в полевых условиях.
[00244] Простой пример для пояснения этой концепции. Рассмотрим решетку из 4 антенн, распределение амплитуд CSB которых составляет 0,7/1,0/1,0/0,7 (эта диаграмма содержится в «таблице коэффициентов решетки»). Если никаких конкретных настроек от оператора не поступило, CU устанавливает ARU с «настройками антенны» 0,7/1,0/1,0/0,7. Если оператор хочет удвоить амплитуду в целом, он даст CU «общую команду», которая будет переведена в «настройки антенны» 1,4/2,0/2,0/1,4 для ARU. Затем, если оператор захочет увеличить на 5% уровень амплитуды только второй антенны, он даст CU «индивидуальную настройку», которая будет переведена в «настройки антенны» 1,4/2,1/2,0/1,4 для ARU (или, для экономии времени, только второй ARU запрограммируют новым значением 2,1).
[00245] Процедура настройки выглядит следующим образом:
ο Курсовой радиомаяк
• Конфигурирование по умолчанию
• Выравнивание амплитуды
• Выравнивание фазы SBO
• Регулировка фазы CSB
• Настройка ширины сектора
ο Глиссада
• Конфигурирование по умолчанию
• Настройка амплитуды
• Настройка фазы передней SBO в зависимости от фазы задней SBO
• Настройка фазы CSB в зависимости от фазы SBO
• Регулировка фазы CSB
• Настройка ширины сектора
[00246] Параметры по умолчанию могут быть заранее сконфигурированы на земле и могут быть определены на основе известного места и условий установки. Сигнал в пространстве, создаваемый курсовым радиомаяком, можно упростить посредством следующей формулы:

[00247] Например, несущая (уровень Acsb которой является адекватной функцией азимута) по амплитуде модулируется двумя навигационными тонами 90 Гц и 150 Гц, индекс модуляции которых составляет суммарно 40% (SDM), а их разность (DDM) является знаковой функцией азимута (насколько это возможно линейной), чтобы он составлял 0% на центральной линии и ±15,5% по краям ширины сектора (т.е. при ϕ=±ϕW, где 2ϕW есть общая ширина сектора):
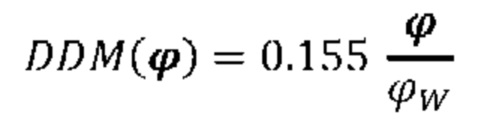
[00248] Другие характеристики сигнала в пространстве, такие как переменный SDM, идентификационный код, частота РЧ, в данном документе не рассматриваются, так как они совершенно не зависят от местоположения приемника. Кроме того, сигнал клиренса игнорируется в настоящем описании для простоты.
[00249] Хорошо известно, что такой сигнал может быть получен путем питания по меньшей мере на двух антенн, одной с правой стороны, а другой елевой стороны от центральной линии, слегка различающимися сигналами. Каждая антенна питается сигналом, содержащим несущую и навигационные тона в фазе, (называемым CSB), и сигналом, содержащим только навигационные тона в противофазе друг другу и в квадратуре по отношению к несущей, (называемым SBO). Сигнал CSB подается на левую и правую антенны с одинаковой амплитудой и фазой, а сигнал SBO подается на левую и правую антенны с одинаковой амплитудой, но с противоположными фазами:

[00250] В более общем смысле, чтобы обеспечить точную настройку в полевых условиях, сигнал, подаваемый на каждую антенну, может быть выражен следующей формулой, содержащей ЧЕТЫРЕ параметра настройки:

[00251] Четыре настройки передатчика для каждой антенны включают:
• Acsb (амплитуда CSB, номинально одинаковая для левой и правой антенн, но разная для каждой пары в соответствии с таблицей распределения решетки)
• ψcsb (фаза CSB, номинально равная 0°)
• Asbo (амплитуда SBO, номинально одинаковая для левой и правой антенн, но разная для каждой пары согласно таблице распределения решетки)
• ψsbo (фаза SBO отличается от фазы CSB, номинально на +90° для правых антенн и на -90° для левых антенн)
[00252] Если N является размерностью решетки (например, 8 для решетки курсового радиомаяка, предлагаемого сейчас для PILS), теоретически возможно настроить до 4*N параметров для регулировки сигнала в полевых условиях, в то время как для существующей системы с блоком фиксированного распределения можно установить только 3 параметра (общую амплитуду CSB, общую амплитуду SBO, основную фазу SBO/CSB), при этом отдельные фазы могут быть отрегулированы путем обрезки каждого кабеля антенны, а индивидуальные амплитуды вообще не могут быть отрегулированы.
[00253] Для настройки сигнала в полевых условиях предлагается следующая процедура, в которой все четыре параметра для каждой антенны могут быть настроены для регулировки сигнала в конкретных местоположениях в пространстве. Некоторые этапы (грубая настройка) являются обязательными, некоторые другие (точная настройка) необязательны и могут применяться или улучшаться на основании требуемой точности, опыта оператора, окружающей среды, доступного времени и доступных инструментов (например, дронов).
[00254] Предлагаемая решетка для PILS состоит из 8 антенн, которые питаются сигналами, приведенные для примера настройки по умолчанию которых перечислены в таблице 4 ниже. Однако следует понимать, что в зависимости от конструктивных требований может использоваться большее или меньшее количество элементов антенн.
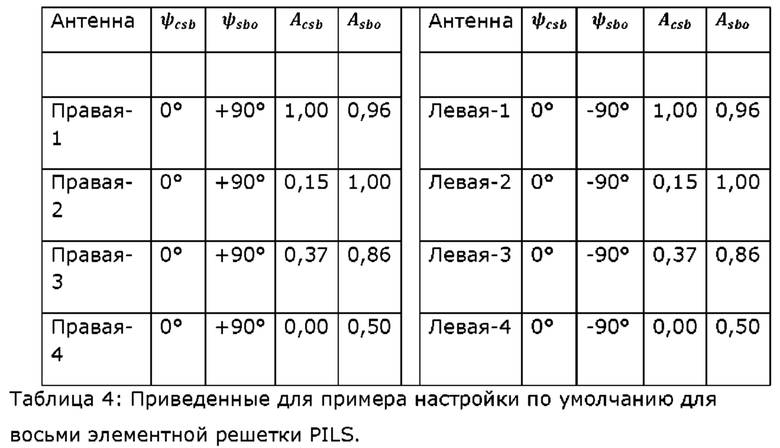
[00255] Коэффициенты амплитуды решетки обычно нормированы к 1. Коэффициенты Acsb (амплитуда CSB) должны быть масштабированы посредством типичного фактора, необходимого для достижения требуемого покрытия в стандартной окружающей среде (в текущей 14-элементной системе сигнал CSB на эталонной антенне приблизительно равен 1 Вт). Коэффициенты Asbo должны быть масштабированы посредством фактора, зависящего от ширины сектора входа (например, на основе моделирования множитель равен 0,8, если ширина составляет ±2°).
[00256] Процедура настройки может быть организована в пять подпроцедур.
1) Конфигурирование по умолчанию. Все антенны установлены на сигналы по умолчанию, перечисленные в таблице выше, с соответствующими коэффициентами масштабирования для амплитуд.
2) Выравнивание амплитуды (Acsb). Эта процедура точной настройки выравнивает интенсивность сигнала, создаваемого правой и левой антеннами каждой пары, которая может отличаться из-за ухудшения характеристик передатчиков, усиления антенны или отражений от земли. Несущий сигнал (CSB) используется для выравнивания амплитуд, но та же коррекция затем применяется к сигналу боковой полосы (SBO), поскольку два сигнала создаются одними и теми же передатчиками и излучаются одними и теми же антеннами.
Включают по одной антенне и устанавливают Asbo равным нулю. Измеряют уровень РЧ на центральной линии (в конечном итоге усредняя значения на достаточно длинном пути) и сравнивают измерение сигнала, создаваемого двумя антеннами (левой и правой) одной и той же пары. Если принимаемый уровень РЧ, связанный елевой антенной, больше, чем уровень РЧ правой антенны, на коэффициент «R», увеличивают Acsb (справа) и уменьшают Acsb (слева) на такой же коэффициент, равный «R»/2. Два уровня РЧ, принятые в полевых условиях, теперь должны быть равны. Затем применяют ту же коррекцию к значениям Acsb как для правой, так и для левой антенны. Повторяют тот же этап для каждой пары антенн.
3) Выравнивание фазы SBO (ψsbo). Эта рекомендуемая процедура настраивает фазы SBO левой и правой антенн каждой пары таким образом, чтобы на центральной линии два SBO компенсировались, a DDM равнялся нулю.
Включают по одной паре антенн, при этом для сигналов CSB и SBO устанавливают значения по умолчанию с корректировками, определенными на предыдущем этапе. Выключают все остальные пары. Измеряют DDM на центральной линии (в конечном итоге усредняя значение на длинном пути). Если она не равна нулю, увеличивают ψsbo (слева) и уменьшают ψsbo (справа) на ту же величину (например, 1°). Если DDM приблизилась к нулю, продолжают в этом же направлении, в противном случае изменяют направление. Останавливаются, когда DDM достигнет минимального абсолютного значения. Повторяют тот же этап для каждой пары антенн.
Теоретически, зная расстояние между двумя антеннами и амплитуду SBO относительно CSB, можно определить обратную формулу для вычисления требуемой регулировки фазы в зависимости от измеренной DDM (включая также знак и, следовательно, правильное направление). Эта формула, не показанная здесь, может быть использована в качестве отправной точки для итеративного алгоритма для экономии времени.
4) Регулировка фазы CSB (ψcsb). Эту процедуру точной настройки можно использовать для регулировки симметрии ширины, в зависимости оттого, что является причиной асимметрии, с использованием значений по умолчанию. Фактически, моделирование доказывает, что модификация фазы CSB правой и левой антенны позволяет создать асимметричную диаграмму CSB, которая способна компенсировать возможную асимметрию DDM с двух сторон. Этот факт следует проверить в полевых условиях, так как для текущей системы он никогда не применялся.
Включают всю решетку со значениями по умолчанию, скорректированными на предыдущих этапах. Измеряют DDM на правом и левом краях сектора (у порога или, в конечном счете, на достаточно длинном пути). Если два абсолютных DDM различаются, увеличивают ψcsb (слева) и уменьшают ψcsb (справа) на одинаковую величину (например, 5°) для каждой антенны. Если симметрия улучшится, продолжают в этом же направлении, в противном случае изменяют направление. Останавливаются, когда DDM достигнет требуемой симметрии.
5) Настройка ширины сектора (Asbo). Эта обязательная процедура регулирует общую амплитуду SBO, необходимую для получения заданной ширины сектора входа, т.е. значения азимута, при котором DDM составляет 0,155.
6) Включают всю решетку со значениями по умолчанию, скорректированными на предыдущих этапах. Измеряют абсолютное значение DDM на правом и левом краях сектора (на пороге или, в конечном счете, на достаточно длинном пути). Вычисляют «R» как среднее двух значений, деленных на 0,155. Если R≠1, уменьшают или увеличивают как Asbo (слева), так и Asbo (справа) на одинаковую величину для каждой антенны, равную «R»/2. Эта процедура должна давать желаемое значение только за один шаг или, по крайней мере, за два итерационных шага.
[00257] В приведенной ниже таблице 5 обобщены пять процедур, описанных выше:
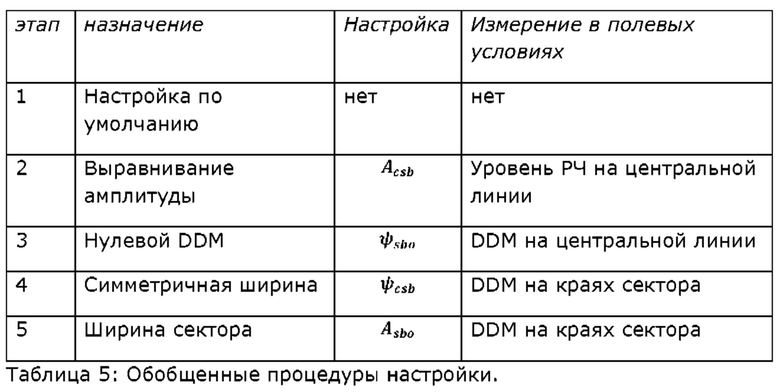
[00258] Следует отметить, что в существующей системе требуется процедура поиска наилучшего ψsbo, максимизирующего чувствительность смещения, для компенсации произвольной фазы SBO/CSB передатчика, РЧ ТХ кабелей и блока распределения. Эта процедура не требуется для PILS. На самом деле, поскольку SBO генерируется вместе с CSB в передатчике антенны, по умолчанию он устанавливается в квадратуре, чтобы он был в фазе в полевых условиях, и в идеальном случае не требовал никакой настройки.
[00259] В конце процедуры все коэффициенты могут отличаться от значений по умолчанию, но распределение амплитуды коэффициентов остается неизменным (безопасные незначительные коррекции слева-справа). Можно также провести дальнейший анализ, чтобы изучить возможность модификации этого распределения для регулировки измеренного сигнала в пространстве относительно того, что ожидается, в конечном итоге на всем круговом полете (где, например, DDM должен быть линейным). Аналогичная процедура будет применяться к сигналу клиренса, и, наконец, наиболее подходящее отношение захвата курс/клиренс будет найдено путем сравнения двух уровней РЧ на соответствующем круговом полете.
[00260] Сигнал в пространстве, производимый глиссадой, может быть выражен формулой, очень похожей на формулу сигнала курсового радиомаяка:

[00261] В этой формуле основными отличиями являются SDM (80%) и зависимость от угла возвышения вместо угла азимута. DDM представляет собой знаковую линейную функцию, равную 0% при заданном угле входа (в настоящем документе он равен 3°) и ±17,5% на краях ширины сектора (в настоящем документе он равен 3°±0,7°):
[00262] Стандартное изображение GP выдает желаемый DDM в пространстве посредством набора антенн, смонтированных на вертикальной мачте, сигнал которого в пространстве представляет собой комбинацию прямых сигналов с сигналами, отраженными на земле. Вместо этого для PILS предлагается система без изображения, в которой используется принцип, очень похожий на принцип курсового радиомаяка: две антенны (или две решетки из 5 антенн) смещаются по линии, параллельной взлетно-посадочной полосе, на достаточном расстоянии, и питаются CSB в фазе и SBO в противофазе, так что при θ=3° два CSB объединяются, а два SBO компенсируются, создавая нулевой DDM, как требуется.
[00263] Каждая антенна (которая принадлежит либо к «задней» решетке, либо к «передней» решетке) питается комбинацией сигналов CSB и SBO, амплитуда и фаза которых могут быть установлены индивидуально для настройки:

[00264] Таким образом, четыре настройки передатчика для каждой антенны такие же, как и у курсового радиомаяка:
• Acsb (Амплитуда CSB)
• ψсsb (Фаза CSB)
• Asbo (Амплитуда SBO)
• ψsbo (Фаза SBO относительно фазы CSB)
[00265] Сложность с курсовым радиомаяком заключается в том, что местоположение антенн теоретически зависит от частоты и заданного угла входа. Однако исследуется возможность фиксации геометрии системы и электронной регулировки сигналов на антеннах для достижения требуемого угла входа на рабочей частоте. Моделирование, кажется, доказывает, что это возможно: в этом случае значения по умолчанию Acsb, Asbo, ψcsb, ψsbo, вместо того, чтобы быть постоянными, как в курсовом радиомаяке, будут функцией частоты и заданного угла входа и могут быть сохранены в EEPROM центрального блока.
[00266] Другой сложностью, характерной для горизонтальной решетки, является зависимость сигнала от азимута приемника, почти отсутствующая в вертикальной GP по симметричной причине. Эта зависимость корректируется конструкцией, но может требовать адекватной настройки в полевых условиях с желаемыми измерениями на поперечном круговом полете. Для простоты эта настройка не рассматривается в настоящем документе, но она действительно может добавить значение активной распределенной системе по сравнению с пассивным распределением (в которой регулировка фазы выполняется вручную путем физического изменения местоположения пьедестала, в то время как регулировка амплитуды вообще не может быть выполнена).
[00267] Дальнейшее упрощение, предполагаемое в настоящем документе, заключается в отсутствии сигнала клиренса, что фактически может потребовать настройки в полевых условиях, а также настройки отношения мощности сигнала курса к мощности сигнала клиренса.
[00268] Также описана процедура настройки горизонтальной глиссады в полевых условиях. Предлагается следующая процедура для настройки сигнала в полевых условиях, при которой, на данный момент, все антенны, принадлежащие решетке (задней или передней), для простоты настраиваются вместе. На практике процедура продумана так, чтобы программируемых антенн было только две. Дальнейший анализ будет выполнен для определения подходящей процедуры для индивидуальной настройки каждого элемента двух решеток, особенно для регулировки поперечной диаграммы.
[00269] Просто в качестве примера, настройки по умолчанию для угла входа в 3°, на частоте 332 МГц, с фиксированной геометрией, описанной в другом документе и еще не оптимизированной, перечислены в таблице 6 ниже. Следует отметить, что большее или меньшее количество элементов антенны для решетки GP может быть использовано в зависимости от требований проекта и не ограничивается количеством элементов антенны, указанных в таблице 6 ниже.

[00270] Процедура может быть организована в шесть подпроцедур (на одну больше, чем для курсового радиомаяка, поскольку здесь требуется фазировка SBO/CSB для адаптации фиксированной геометрии к частоте и углу входа):
1) Конфигурирование по умолчанию. Все антенны установлены на сигналы по умолчанию, перечисленные в таблице выше, что может привести к получению сигнала, весьма далекого от ожидаемого, поскольку для горизонтальной GP угол входа очень чувствителен к местоположению антенн и к РЧ-фазе передатчиков.
2) Настройка амплитуды (Acsb). Эта процедура точной настройки выравнивает интенсивность сигнала, создаваемого передней и задней решетками, которые могут различаться из-за ухудшения характеристик передатчиков, усилений антенны или отражений от земли. Это должно быть выполнено в дальнем поле (например, в 4 морских милях (NM)), где расстояния от передней решетки и от задней решетки могут быть приблизительно равными.
Включают по одной решетке и устанавливают Аsbо равным нулю. Измеряют уровень РЧ под углом входа (в конечном итоге усредняя значения по достаточно длинному пути) и сравнивают измерение сигнала, создаваемого двумя решетками (задней и передней). Если уровень РЧ, связанный с задней решеткой, больше, чем уровень РЧ передней решетки, на коэффициент «R», увеличивают Acsb (передней) и уменьшают Acsb (задней) на тот же коэффициент «R»/2. Теперь два уровня РЧ должны быть выровнены. Затем применяют ту же коррекцию к значениям Asbo как для передней, так и для задней решеток.
3) Настройка фазы SBO передней решетки в зависимости от фазы SBO задней решетки (ψsbo). Эта обязательная процедура ищет значение фазы SBO двух решеток так, чтобы при угле входа два SBO аннулировались, a DDM был равен нулю. Это может отличаться от теоретического номинального значения (которое может быть определено аналитическим методом) из-за большой чувствительности DDM к местоположению антенны.
Включают обе решетки с сигналами CSB и SBO, установленными на значения по умолчанию с корректировками, определенными на предыдущем этапе. Измеряют DDM под углом входа (в конечном итоге усредняя значение на длинном пути). Если оно не равно нулю, увеличивают ψsbo (задней) и уменьшают ψsbo (передней) на ту же величину (например, 0,5°). Если DDM приблизился к нулю, продолжают в этом же направлении, в противном случае изменяют направление. Останавливаются, когда DDM достигнет минимального абсолютного значения. Теоретически можно определить обратную формулу для вычисления требуемой регулировки фазы в зависимости от измеренного DDM (включая также знак и, следовательно, правильное направление). Эта формула, не показанная здесь, может быть использована в качестве отправной точки для итеративного алгоритма для экономии времени.
4) Настройка фазы SBO в зависимости от фазы CSB (ψsbo). Эта процедура, которая не требуется в курсовом радиомаяке PILS, может потребоваться для совмещения фазора SBO с фазором CSB в полевых условиях, чтобы максимизировать чувствительность смещения. Оптимальное значение может быть вычислено теоретически, но фактическое значение может отличаться из-за влияния окружающей среды. Кроме того, моделирование показывает, что измерения могут быть выполнены при малых углах возвышения с надежными результатами. Далее из практических соображений ищется квадратурное условие (которое найти проще), а затем SBO сдвигается на 90°.
Включают обе решетки с сигналами CSB и SBO, установленными на значения, отрегулированные на предыдущих этапах. Добавляют +90° ко всем значениям ψsbo, как для передней решетки, так и для задней решетки. Измеряют DDM на верхнем и нижнем краях сектора (т.е. 2,3° и 3,7°, в конечном итоге на достаточно длинном пути) и вычисляют среднее двух абсолютных значений. Если оно не равно нулю, увеличивают все ψsbo (как передние, так и задние) на одинаковую величину (например, 1°). Если DDM приближается к нулю, продолжают в этом же направлении, в противном случае изменяют направление. Останавливаются, когда DDM достигнет минимального абсолютного значения. Затем отнимают +90° от всех значений ψsbo (как передние, так и задние). Новые значения, в квадратуре по отношению к значениям, оптимизированным для минимального DDM, должны давать максимальную чувствительность смещения DDM, поскольку SBO и CSB находятся в фазе.
5) Регулировка фазы С SB (ψsbo). Эта процедура точной настройки может регулировать симметрию ширины, в зависимости от того, что является причиной асимметрии, с использованием значений по умолчанию. Фактически, моделирование доказывает, что, модифицируя фазу CSB между задней и передней решетками, можно создать асимметричную диаграмму CSB, которая способна компенсировать возможную асимметрию DDM с двух сторон. Этот факт должен быть проверен в полевых условиях.
Включают обе решетки со значениями по умолчанию, скорректированными на предыдущих этапах. Измеряют DDM на верхнем и нижнем краях сектора (т.е. 2,3° и 3,7°, в конечном итоге на достаточно длинном пути). Если абсолютные значения двух DDM различаются, увеличивают ψcsb (переднее) и уменьшают ψcsb (заднее) на ту же величину (например, 1°). Если симметрия улучшится, продолжают в этом же направлении, в противном случае изменяют направление. Останавливаются, когда DDM достигнет требуемой симметрии.
6) Настройка ширины сектора (Asbo). Эта обязательная процедура регулирует общую амплитуду SBO, необходимую для достижения правильной ширины сектора, т.е. значений угла возвышения (номинально 3°±0,7°), где DDM составляет 0,175.
Включают обе решетки со значениями по умолчанию, скорректированными на предыдущих этапах. Измеряют DDM на верхнем и нижнем краях сектора (т.е. 2,3° и 3,7°, в конечном счете, на достаточно длинном пути) и вычисляют «R» как отношение между средним двух значений и 0,175. Если R≠1, уменьшают или увеличивают значения Asbo обоих решеток на одинаковую величину, равную «R»/2. Эта процедура должна давать желаемое значение только за один шаг или, по крайней мере, за два итерационных шага.
[00271] В приведенной ниже таблице 7 обобщены шесть процедур, описанных выше. После последнего этапа может потребоваться дополнительная точная настройка угла входа (этап 3).
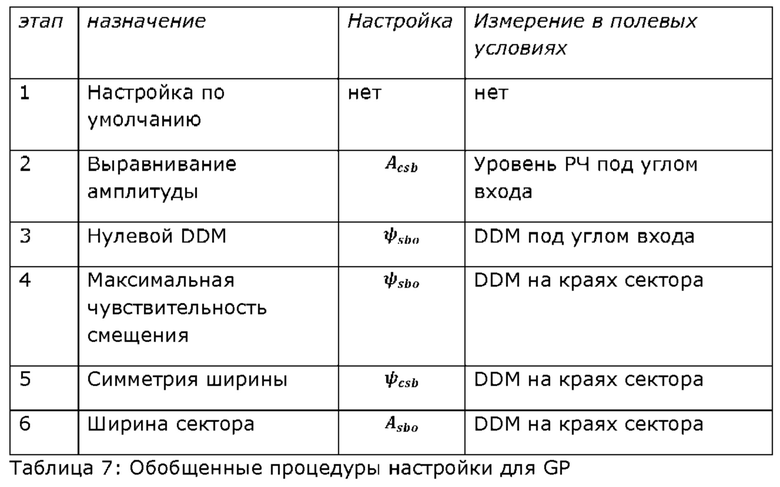
[00272] Контур управления настройкой (TCL) управляется CCS и включает все четыре подсистемы PILS - CCS, TD, LOC и GP. TCL согласно некоторым вариантам осуществления описан ниже.
[00273] Набор «эталонных точек» (т.е. координат) необходимо определить во время настройки на месте и запрограммировать в CCS. Они могут включать: а) центральную точку порога взлетно-посадочной полосы, б) центральную точку конца взлетно-посадочной полосы и в) точку посадки (эталон для угла возвышения; это местоположение, где глиссада пересекает угол). После начала действия по настройке CCS уведомляет LOC и GP о том, что происходит настройка. LOC и GP должны принять меры (например, войти в тестовый режим), чтобы гарантировать, что в течение этого времени воздушное движение не попытается использовать сигнал ILS. Идентификация отключена или непрерывна в тестовом режиме.
[00274] CCS имеет заранее запрограммированную траекторию полета и использует «эталонные точки» для вычисления местоположений в пространстве, при которых должны выполняться измерения. CCS также может служить точкой интерфейса человек-машина (HMI) для ручного ввода траектории полета или местоположения. CCS также позволяет полностью ручное управление TD. В некоторых вариантах осуществления CCS командует подсистеме TD лететь в конкретное местоположение. Беспилотный летательный аппарат (БПЛА; часть подсистемы TD) летит в это конкретное местоположение. В некоторых вариантах осуществления во время полета подсистема TD постоянно передает информацию о местоположении обратно в CCS. Эти данные о местоположении поступают как от БПЛА, так и от любых наземных устройств слежения за местоположением в соответствии с некоторыми вариантами осуществления.
[00275] CCS компилирует и обрабатывает данные о местоположении для определения точного местоположения БПЛА в пространстве согласно некоторым вариантам осуществления. CCS постоянно обновляет полетные инструкции, основанные на вычисленном текущем местоположении. БПЛА и наземные устройства передают информацию о местоположении наземной станции TD, которая, в свою очередь, передает информацию на CCS согласно некоторым вариантам осуществления.
[00276] Когда заданное местоположение достигнуто, CCS командует TD начать измерение параметров для LOC, GP или обоих согласно некоторым вариантам осуществления. Данные измерений передаются обратно в CCS через наземную систему TD в соответствии с некоторыми вариантами осуществления. Когда заданное местоположение достигнуто, CCS командует TD начать измерение параметров для LOC, GP или обоих. Данные измерений передаются обратно в CCS через наземную систему TD. В некоторых вариантах осуществления TD также может постоянно измерять как данные LOC, так и данные GP и постоянно сообщать их обратно в CCS.
[00277] Поскольку измерения выполняются в точке измерения в пространстве, CCS обрабатывает данные и определяет ошибку измерения, т.е. текущее измерение по сравнению с желаемым измерением, в соответствии с некоторыми вариантами осуществления. Для полетных инструкций, которые требуют одновременного движения и измерения, крайне важно, чтобы данные о местоположении и данные измерений были синхронизированы так, чтобы данные измерений были известны в каждой конкретной точке на пути. Если требуется компенсация задержки или постобработка, БПЛА может «зависнуть» и/или выполнить посадку, пока CCS обрабатывает данные.
[00278] CCS использует ошибку измерения для вычисления изменений сигнала в пространстве (Signal-in-Space, SiS), необходимых для одного или более элементов антенны в антенных решетках LOC или GP, согласно некоторым вариантам осуществления. CCS командует центральным модулям обработки (Central Processing Module, СРМ) LOC и/или GP внести требуемые изменения в SiS, передаваемый конкретными элементами, в соответствии с некоторыми вариантами осуществления. Изменения SiS вносятся в подсистемы LOC и GP, a LOC и GP сообщают CCS о завершении внесения изменений. Если необходимо, CCS может командовать LOC и/или GP передавать только через конкретные элементы антенны, в некоторых вариантах осуществления, при этом каждый элемент имеет независимые блоки управления включением/выключением передатчика.
[00279] TD продолжает измерять SiS, a CCS продолжает обрабатывать данные измерений и запрашивать изменения LOC и GP в некоторых вариантах осуществления. TD повторяет траекторию полета для текущего измерения, a CCS проверяет, что SiS «хорош». Как только измеренное SiS становится приемлемым, CCS командует TD лететь к следующему местоположению измерения в некоторых вариантах осуществления. CCS следит за изменениями, сделанными в различных местоположениях, и определяет, нужно ли повторно посетить какие-либо местоположения в результате изменений SiS, сделанных в других местоположениях.
[00280] Хотя некоторые параметры LOC и GP могут настраиваться одновременно, предполагается, что по большей части сначала будет настраиваться один, а затем будет настраиваться другой. После того, как все настройки завершены, CCS может командовать TD лететь по проверочной траектории полета, и в течение этого полета CCS гарантирует, что все измерения находятся в пределах допустимых значений во всех критических местоположениях. После завершения полетной проверки CCS командует БПЛА выполнить посадку. CCS указывает LOC и GP, что событие настройки закончилось, и LOC и GP могут возобновить режим нормальной работы.
[00281] Контур управления предназначен для корректировки отклонений местоположения таким образом, чтобы заданное местоположение сохранялось. Для реализации с GPS, контур управления является автономным внутри дрона. Для реализаций, не поддерживающих GPS/GNSS, будет выполняться распределенная локализация с использованием бортовых датчиков и/или наземных датчиков. Информация будет консолидирована при управлении настройкой местоположения. Определение местоположения должно выполняться с достаточно малой задержкой, чтобы соответствовать законам управления позиционированием (т.е. <400 мс, в зависимости от скорости). Это включает низкие задержки при передаче различных данных о местоположении из распределенных источников. Процедуры корректировки отклонений местоположения в ситуациях отсутствия GPS также могут быть использованы в реализациях с GPS, в которых наблюдается прием сигнала GPS.
[00282] Дрон может выполнять следующие измерения для настройки систем навигационных средств и наблюдения:
ο DDM:
• Измерение, необходимое для настройки
• Окончательное измерение качества - конечный результат
• Общий DDM, сверх необходимого объема покрытия для соответствия стандарту
ο Компоненты сигналов CSB и SBO
• Измерение, необходимое для настройки
• Настройка компонента сигнала влияет на DDM
• В идеале, для настройки следует использовать только амплитуду тона модуляции
• Возможно также установить фазу
ο Уровень РЧ несущей
• Измерение, необходимое для настройки
ο Идентификация
• Не требуется для настройки, но подлежит проверке на соответствие
ο Частота
• Не требуется для настройки
• Частота может быть заранее задана и проверена на земле
ο Спектр
• Не требуется для настройки, но проверяется на соответствие
• Может быть измерен на земле
ο Частота тона
• Не требуется для настройки, но проверяется на соответствие
• Может быть измерена на земле
ο Тон THD
• Не требуется для настройки, но проверяется на соответствие
• Может быть измерен на земле
[00283] Фиг. 52 иллюстрирует способ, выполняемый системой управления, сообщающейся с одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Например, фиг. 51 иллюстрирует приведенную для примера систему 5100 управления, сообщающуюся с системой 5102 аэронавигационных средств и с системой 5104 наблюдения за летательным аппаратом. В соответствии с вариантами осуществления система аэронавигационных средств может содержать по меньшей мере одно из следующего: систему курсового радиомаяка, глиссадную систему, систему VOR, систему TACAN и систему DME. В некоторых вариантах осуществления система аэронавигационных средств может содержать систему курсового радиомаяка, как описано выше со ссылкой на фиг. 4 и фиг. 32-34. В некоторых вариантах осуществления система аэронавигационных средств может содержать глиссадный радиомаяк/глиссадную систему, как обсуждалось выше со ссылкой на фиг. 1, 10 и 32-34, как описано выше. В некоторых вариантах осуществления система наблюдения за летательным аппаратом содержит радиолокационную систему наблюдения.
[00284] Возвращаясь к фиг. 52, способ включает получение 5200 данных измерений, связанных с РЧ-сигналами, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, от беспилотного летательного аппарата (БПЛА), сообщающего эти данные измерений. Например, система 5100 управления, показанная на фиг. 51, получает данные измерений, связанные с РЧ-сигналами 5110, 5112, переданными указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, от БПЛА 5114, сообщающего эти данные измерений. Способ также включает определение 5202, указывают ли данные измерений, что РЧ-сигналы находятся в диапазоне значений, основанном на местоположении БПЛА в воздушном пространстве, ближайшем к указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Дополнительные примеры и варианты осуществления, касающиеся определения, указывают ли данные измерений РЧ-сигналы в диапазоне значений, также обсуждались выше, например, в отношении фиг. 1 и 26-48.
[00285] Например, фиг. 51 иллюстрирует систему 5100 управления, которая определяет, указывают ли данные измерений, что РЧ-сигналы 5110, 5112 находятся в диапазоне значений, основанном на местоположения БПЛА 5114 в воздушном пространстве, ближайшем к указанной одной из системы 5102 аэронавигационных средств и системы 5102 наблюдения за летательным аппаратом. Возвращаясь к фиг. 51, способ также включает управление 5204 РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основе данных измерений и местоположения БПЛА. В продолжение предыдущего примера, система 5100 управления управляет РЧ-сигналами 5110, 5112, переданными указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, на основе данных измерений и местоположения БПЛА 5114. Дополнительные примеры и варианты осуществления, касающиеся управления РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, также обсуждались выше со ссылкой на фиг. 26-48 и 50.
[00286] Фиг. 53 иллюстрирует способ, включающий передачу 5300 в БПЛА инструкции выполнить полет в желаемое местоположение в воздушном пространстве в некоторых вариантах осуществления. Например, система 5100 управления передает в БПЛА 5114 инструкция выполнить полет в желаемое местоположение в воздушном пространстве. Фиг. 53 также иллюстрирует, что способ включает определение 5302, находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве. Продолжая предыдущий пример, система 5100 управления, показанная на фиг. 51, определяет, находится ли фактическое местоположение БПЛА 5114 в пределах заранее заданного порога желаемого местоположения в воздушном пространстве. Дополнительные примеры и варианты осуществления, касающиеся системы управления, определяющей, находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве, также обсуждались выше, например, в отношении фиг. 1, 26, 30-35 и 49.
[00287] Фиг. 54 иллюстрирует способ, который также включает передачу 5400 в БПЛА инструкции сообщить данные измерений от измерения БПЛА РЧ-сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, в ответ на определение фактического местоположения БПЛА, которое находится в пределах заранее заданного порога, согласно некоторым вариантам осуществления. В продолжение предыдущего примера, система 5100 управления передает в БПЛА 5114 инструкцию сообщить данные измерений от измерения БПЛА РЧ-сигналов 5110, 5112, переданных указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, в ответ на определение фактического местоположения БПЛА, которое находится в пределах заранее заданного порога. В этом варианте осуществления способ также включает прием 5402 от БПЛА данных измерений, сообщенных БПЛА, от измерения РЧ-сигналов в ответ на передачу инструкции сообщить данные измерений, как показано на фиг. 53. В продолжение предыдущего примера, система 5100 управления принимает от БПЛА 5114 данные измерений, сообщенные БПЛА, от измерения РЧ-сигналов 5110, 5112 в ответ на передачу инструкции сообщить данные измерений. Дополнительные примеры и варианты осуществления, относящиеся к системе управления, принимающей от БПЛА данные измерений, сообщенные БПЛА, от измерения РЧ-сигналов в ответ на передачу инструкции сообщить данные измерений, также обсуждались выше, например, в отношении фиг. 1 и 26-35.
[00288] В соответствии с некоторыми вариантами осуществления, способ также включает передачу 5500 в БПЛА второй инструкции скорректировать фактическое положение БПЛА так, чтобы оно было в пределах заранее заданного порога, в ответ на определение того, что фактическое местоположение БПЛА не находится в пределах заранее заданного порога желаемого местоположения в воздушном пространстве, как показано на фиг. 55. В другом примере система 5100 управления, показанная на фиг. 51, передают в БПЛА 5114 вторую инструкцию скорректировать фактическое положения БПЛА 5114 так, чтобы оно было в пределах заранее заданного порога, в ответ на определение того, что фактическое местоположение БПЛА 5114 не находится в пределах заранее заданного порога желаемого местоположения в воздушном пространстве. В этом варианте осуществления, фиг. 55 иллюстрирует, что способ также включает определение 5502 того, что скорректированное фактическое местоположение БПЛА находится в пределах заранее заданного порога, в ответ на передачу второй инструкции. В продолжение предыдущего примера, система 5100 управления определяет, что скорректированное фактическое местоположение БПЛА 5114 находится в пределах заранее заданного порога, в ответ на передачу второй инструкции.
[00289] Фиг. 55 также иллюстрирует, что способ также включает передачу 5504 в БПЛА инструкции сообщить данные измерений от измерения БПЛА РЧ-сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, согласно некоторым вариантам осуществления. В продолжение предыдущего примера, система 5100 управления передает в БПЛА 5114 инструкцию сообщить данные измерений от измерения РЧ-сигналов 5110, 5112, переданных указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом. В этом варианте осуществления, фиг. 55 иллюстрирует способ, который также включает прием 5506 от БПЛА данных измерений, сообщенных БПЛА, от измерения РЧ-сигналов в ответ на передачу инструкции сообщить данные измерений. В предыдущем примере система 5100 управления также принимает от БПЛА 5114 данные измерений, сообщенные БПЛА 5114, от измерения РЧ-сигналов 5110, 5112 в ответ на передачу инструкции сообщить данные измерений. Дополнительные примеры и варианты осуществления, относящиеся к способу, описанному со ссылкой на фиг. 55, также обсуждались выше, например, в отношении фиг. 1 и 30-35.
[00290] В некоторых вариантах осуществления способ также включает получение информации о местоположении, идентифицирующей фактическое местоположение БПЛА в воздушном пространстве, по меньшей мере от одного из измеряющего устройства системы управления и БПЛА. Например, система 5100 управления, показанная на фиг. 51, получает информацию о местоположении, идентифицирующую фактическое местоположение БПЛА в воздушном пространстве, по меньшей мере от одного из измеряющего устройства 5116 системы управления 5100 и БПЛА 5114. В некоторых вариантах осуществления измеряющее устройство содержит одно или более из следующего: первичный обзорный радиолокатор, лазерный трекер, РЧ-маяк, тахеометр, барометрический высотомер, инерциальная навигационная система, радиолокационный/лазерный высотомер. В некоторых вариантах осуществления информация о местоположении содержит GPS-координаты БПЛА. В некоторых вариантах осуществления информация о местоположении содержит дальность, азимут и угол возвышения БПЛА. В некоторых вариантах осуществления информация о местоположении содержит атмосферное давление, которое действует на БПЛА. В некоторых вариантах осуществления информация о местоположении включает счисление местоположения, ориентации и скорости БПЛА. В некоторых вариантах осуществления информация о местоположении содержит информацию, указывающую количество времени, которое требуется лучу радиоволн или лучу света, чтобы добраться до земли под БПЛА, отразиться и вернуться к БПЛА.
[00291] В некоторых вариантах осуществления способ также включает определение, находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве на основе информации о местоположении. Продолжая предыдущий пример, система 5100 управления определяет, находится ли фактическое местоположение БПЛА 5114 в пределах заранее заданного порога желаемого местоположения в воздушном пространстве на основе информации о местоположении. В некоторых вариантах осуществления воздушное пространство, ближайшее к указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, представляет собой воздушное пространство, в котором отсутствуют сигналы GNSS. В этом варианте осуществления способ также включает получение информации о местоположении, идентифицирующей фактическое местоположение БПЛА в воздушном пространстве, в котором отсутствуют сигналы GNSS, от измеряющего устройства системы управления. Например, воздушное пространство, ближайшее к указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, может содержать воздушное пространство, в котором отсутствуют сигналы GNSS. В этом примере система 5100 управления получает информацию о местоположении, идентифицирующую фактическое местоположение БПЛА 5114 в воздушном пространстве, в котором отсутствуют сигналы GNSS, от измеряющего устройства 5116 системы 5116 управления.
[00292] В некоторых вариантах осуществления инструкция выполнить полет в желаемое местоположение в воздушном пространстве также содержит инструкцию для БПЛА зависнуть в желаемом местоположении в воздушном пространстве. В некоторых других вариантах осуществления инструкция сообщить данные измерений от измерения БПЛА РЧ-сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, содержит инструкцию сообщить результат измерения РЧ сигналов во время зависания в желаемом местоположении в воздушном пространстве. В этих вариантах осуществления БПЛА выполнен с возможностью зависания в воздушном пространстве во время полета. Например, БПЛА 5114, показанный на фиг. 51, может содержать один или более квадрокоптеров, гектакоптеров, октокоптеров и вертолетов, выполненных с возможностью зависания в желаемом местоположении в воздушном пространстве. В некоторых вариантах осуществления БПЛА выполнен с возможностью вертикального взлета и посадки.
[00293] Фиг. 56 иллюстрирует, что способ также включает определение 5600 того, что данные измерений указывают, что РЧ-сигналы не находятся в диапазоне значений согласно некоторым вариантам осуществления. Способ также включает определение 5602 того, что на основе данных измерений требуется модификация параметра передачи, связанного с РЧ-сигналами. Например, система 5100 управления, показанная на фиг. 51, определяет, что данные измерений указывают, что РЧ-сигналы не находятся в диапазоне значений. Система 5100 управления также определяет, что на основе данных измерений требуется модификация параметра передачи, связанного с РЧ-сигналами, в этом примере. Возвращаясь к фиг. 56, способ также включает передачу 5604 в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции модифицировать параметр передачи, связанный с РЧ-сигналами, в ответ на определение модификации параметра передачи. Продолжая предыдущий пример, система 5100 управления передает в одну из бортовой навигационной системы 5102 и бортовой системы наблюдения 5104 команду на изменение параметра передачи, связанного с РЧ-сигналами, в ответ на определение того, что требуется модификация параметра передачи. Дополнительные примеры и варианты осуществления, относящиеся к способу, описанному со ссылкой на фиг. 56, также обсуждались выше, например, в отношении фиг. 1-5, 10, 26-29, 32-34 и 50.
[00294] Фиг. 57 иллюстрирует, что способ также включает передачу 5700 в БПЛА инструкции сообщить обновленный результат измерения модифицированных РЧ-сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, в соответствии с некоторыми вариантами осуществления. Например, система 5100 управления, показанная на фиг. 51, передает в БПЛА 5114 инструкцию сообщить обновленный результат измерения модифицированных РЧ-сигналов 5110, 5112, переданных указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом. Фиг. 57 также иллюстрирует, что способ также включает прием 5702 от БПЛА обновленных данных измерений, связанных с модифицированными РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Продолжая предыдущий пример, система 5100 управления принимает от БПЛА 5114 обновленные данные измерений, связанные с модифицированными РЧ-сигналами 5110, 5112, переданными указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом. Способ также включает определение 5704, указывают ли обновленные данные измерений, что модифицированные РЧ-сигналы находятся в диапазоне значений. Продолжая предыдущий пример, система 5100 управления определяет, указывают ли обновленные данные измерений, что модифицированные РЧ-сигналы находятся в диапазоне значений.
[00295] В некоторых вариантах осуществления способ также включает передачу в БПЛА инструкции выполнить полет во второе желаемое местоположение в воздушном пространстве для измерения РЧ сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, в ответ на определение того, что обновленные данные измерений указывают, что модифицированные РЧ-сигналы находятся в диапазоне значений. Продолжая предыдущий пример, система 5100 управления передает в БПЛА 5114 инструкция выполнить полет во второе желаемое местоположение в воздушном пространстве для измерения модифицированных РЧ-сигналов 5110, 5112, переданных указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, в ответ на определение того, что обновленные данные измерений указывают, что модифицированные РЧ-сигналы 5110, 5112 находятся в диапазоне значений.
[00296] В другом варианте осуществления способ также включает передачу в БПЛА инструкции на посадку в ответ на определение того, что обновленные данные измерений указывают, что модифицированные РЧ-сигналы находятся в диапазоне значений. В этом примере система 5100 управления передает в БПЛА 5114 инструкцию на посадку в ответ на определение того, что обновленные данные измерений указывают, что модифицированные РЧ-сигналы 5110, 5112 находятся в диапазоне значений.
[00297] Способ также включает определение того, что требуется модификация параметра передачи элемента антенны антенной решетки системы аэронавигационных средств или системы наблюдения за летательным аппаратом согласно некоторым вариантам осуществления. Например, система 5100 управления определяет, что требуется модификация параметра передачи элемента антенны антенной решетки (не показана на фиг. 51) системы 5102 аэронавигационных средств или системы 5104 наблюдения за летательным аппаратом в соответствии с некоторыми вариантами осуществления. В одном варианте осуществления элемент антенны содержит элемент антенны антенной решетки курсового радиомаяка, как описано здесь. В другом варианте осуществления элемент антенны содержит элемент антенны описанной здесь антенной решетки глиссадного радиомаяка/глиссады.
[00298] В этом варианте осуществления способ также включает передачу в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции модифицировать параметр передачи элемента антенны и идентификатор элемента антенны антенной решетки. Продолжая предыдущий пример, система 5100 управления, показанная на фиг. 51, передает в систему 5102 аэронавигационных средств или в систему 5104 наблюдения за летательным аппаратом инструкцию модифицировать параметр передачи элемента антенны и идентификатор элемента антенны антенной решетки. Дополнительные примеры и варианты осуществления, касающиеся способа, описанного в этом варианте осуществления, также обсуждались выше, например, в отношении фиг. 1-5, 10, 26-29, 32-34 и 50.
[00299] Фиг. 58 иллюстрирует способ, который также включает передачу 5800 в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции передать модифицированный РЧ-сигнал, основанный на модифицированном параметре передачи, в соответствии с некоторыми вариантами осуществления. В продолжение предыдущего примера, система 5100 управления передает в систему 5102 аэронавигационных средств или в систему 5104 наблюдения за летательным аппаратом инструкцию передать модифицированные РЧ-сигналы 5110, 5112, основанные на модифицированном параметре передачи. Способ также включает передачу 5802 в БПЛА инструкции сообщить обновленные данные измерения от измерения модифицированного РЧ-сигнала, как показано на фиг. 58. В этом примере система 5100 управления передает в БПЛА 5114 инструкцию сообщить обновленные данные измерений от измерения модифицированных РЧ-сигналов 5110, 5112.
[00300] Фиг. 58 иллюстрирует способ, который также включает прием 5804 от БПЛА обновленных данных измерений, связанных с переданным модифицированным РЧ-сигналом. В продолжение предыдущего примера, система 5100 управления принимает от БПЛА 5114 обновленные данные, связанные с переданными модифицированными РЧ-сигналами 5110, 5112. Фиг. 58 также иллюстрирует, что способ также включает определение 5806, указывают ли обновленные данные измерений, что переданный модифицированный РЧ-сигнал находится в диапазоне значений. В этом примере система 5100 управления определяет, указывают ли обновленные данные измерений, что переданные модифицированные РЧ-сигналы 5110, 5112 находится в диапазоне значений.
[00301] Фиг. 59 иллюстрирует способ, который также включает передачу 5900 в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции передать модифицированный РЧ-сигнала, основанный на модифицированном параметре передачи, только через элемент антенны антенной решетки. Например, система 5100 управления, показанная на фиг. 51, передает в систему 5102 аэронавигационных средств или в систему 5104 наблюдения за летательным аппаратом инструкцию передать модифицированный РЧ-сигнал, основанный на модифицированном параметре передачи, только через элемент антенны антенной решетки. Например, такой как элемент антенны антенных решеток 402, 1002, описанных выше, и антенных решеток, описанных выше со ссылкой на фиг. 32-34.
[00302] Фиг. 59 также иллюстрирует, что способ также включает передачу 5902 в БПЛА инструкции сообщить обновленные данные измерений от измерения модифицированного РЧ-сигнала. Способ также включает прием 5904 от БПЛА обновленных данных измерений, связанных с модифицированным РЧ-сигналом, переданным только через элемент антенны антенной решетки, и определение 5906, указывают ли обновленные данные измерений, что модифицированный РЧ-сигнал, переданный только через элемент антенны антенной решетки находится в диапазоне значений. В продолжение предыдущего примера, система 5100 управления передает в БПЛА 5114 инструкцию сообщить обновленные данные измерения от измерения модифицированных РЧ-сигналов 5110, 5112. В этом примере система 5100 управления принимает от БПЛА 5114 обновленные данные измерений, связанные с модифицированным РЧ-сигналом, переданным только через элемент антенны антенной решетки. Затем система 5100 управления определяет, указывают ли обновленные данные измерений, что модифицированные РЧ-сигналы 5110, 5112, переданные только через элемент антенны антенной решетки, находятся в диапазоне значений. В некоторых других вариантах осуществления инструкция передать модифицированный РЧ-сигнал также содержит инструкцию прекратить передачу через все другие элементы антенны антенной решетки.
[00303] В некоторых вариантах осуществления способ включает определение того, что дополнительные данные измерений находятся в диапазоне значений, и передачу в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции повторно активировать все элементы антенны антенной решетки в ответ на определение того, что дополнительные данные измерений находятся в диапазоне значений. Например, система 5100 управления определяет, что дополнительные данные измерений находятся в диапазоне значений, и передает в систему 5102 аэронавигационных средств или в систему 5104 наблюдения за летательным аппаратом инструкцию повторно активировать все элементы антенны антенной решетки в ответ на определение, что дополнительные данные измерений находятся в диапазоне значений. В другом примере система 5100 управления может указать системе курсового радиомаяка системы 5102 аэронавигационных средств повторно активировать все элементы антенны антенной решетки курсового радиомаяка, такой как антенная решетка 402 курсового радиомаяка и антенная решетка курсового радиомаяка, описанная выше со ссылкой на фиг. 32-34. В другом примере система 5100 управления может указать системе глиссадного радиомаяка/глиссады системы 5102 аэронавигационных средств повторно активировать все элементы антенны антенной решетки глиссадного радиомаяка/глиссады, такой как антенная решетка 1002 глиссадного радиомаяка/глиссады и антенная решетка глиссадного радиомаяка/глиссады, описанная выше со ссылкой на фиг. 32-34.
[00304] Фиг. 60 иллюстрирует способ, который также включает передачу 6000 в БПЛА инструкции сообщить вторые данные измерений от измерения РЧ-сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, во втором местоположении в воздушном пространстве согласно некоторым вариантам осуществления. Например, система 5100 управления, показанная на фиг. 51, передает в БПЛА 5114 инструкцию сообщить вторые данные измерений от измерения РЧ-сигналов 5110, 5112, переданных указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, во втором местоположении в воздушном пространстве. Например, фиг. 61-64 иллюстрируют приведенный для примера БПЛА, двигающийся в разные местоположения в воздушном пространстве для измерения РЧ сигналов, переданных компонентами системы аэронавигационных средств, как более подробно описано ниже.
[00305] Фиг. 60 иллюстрирует, что способ также включает получение 6002 от БПЛА вторых данных измерений, связанных с РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом. Способ также включает определение 6004, указывают ли вторые данные измерений, что РЧ-сигналы находятся во втором диапазоне значений, основанном на втором местоположения БПЛА в воздушном пространстве, как показано на фиг. 60. В продолжение предыдущего примера, система 5100 управления, показанная на фиг. 51, получает от БПЛА 5114 вторые данные измерений, связанные с РЧ-сигналами 5110, 5112, переданными указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом. В этом примере система управления определяет, указывают ли вторые данные измерений, что РЧ-сигналы 5110, 5112 находятся во втором диапазоне значений, основанном на втором местоположении БПЛА 5114 в воздушном пространстве.
[00306] Возвращаясь к фиг. 60, способ также включает управление 6006 РЧ-сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основе вторых данных измерений и второго местоположения БПЛА в воздушном пространстве. В продолжение предыдущего примера, система 5100 управления управляет РЧ-сигналами 5110, 5112, переданными указанной одной из системы 5102 аэронавигационных средств и системы 5104 наблюдения за летательным аппаратом, на основе вторых данных измерений и второго местоположения БПЛА 5114 в воздушном пространстве. Дополнительные примеры и варианты осуществления, касающиеся способа, описанного в этом варианте осуществления, также обсуждались выше, например, в отношении фиг. 1, 30-36, 40, 42, 44 и 47-49, описанных выше, и фиг. 61-64, описанных ниже.
[00307] Фиг. 51 также иллюстрирует систему 5100 управления, содержащую процессор 5106 и память 5108. Память 5108 содержит исполняемые инструкции, которые при их исполнении процессором 5106 вызывают выполнение процессором 5106 операции в соответствии с различными способами, описанными в настоящем документе. В соответствии с некоторыми вариантами осуществления компьютерный программный продукт, содержащийся на некратковременном компьютерочитаемом носителе, таком как память 5108, включает исполняемые инструкции, которые при их исполнении процессором, таким как процессор 5106 системы 5100 управления, сообщающейся с одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, вызывают выполнение системой управления операций различных способов, описанных в настоящем документе. В некоторых вариантах осуществления система 5100 управления приспособлена для выполнения различных способов, описанных здесь.
[00308] В следующих абзацах обсуждаются процессы, которые можно использовать для настройки центральной линии LOC, ширины сектора LOC, угла GP и ширины сектора GP с использованием правильно расположенного и оборудованного дрона.
[00309] Настройка PILS на курс LOC может быть выполнена путем простого зависания дрона или поднятия антенны ILS дрона над центральной линией взлетно-посадочной полосы у конца порога взлетно-посадочной полосы. Местоположение дрона должно контролироваться и измеряться с требуемой точностью до ±0,3 м. Затем данные с приемника ILS дрона могут быть собраны и переданы в CCS для вычислений и регулировок фазы и амплитуды элемента антенны LOC. В соответствии с описанной выше таблицей 1 цель состоит в том, чтобы довести DDM до значения менее 0,42 мкА на центральной линии.
[00310] Затем дрон может зависнуть над центральной линией взлетно-посадочной полосы на пороге на 10-20 м, а затем лететь перпендикулярно центральной линии во второе местоположение на одной стороне взлетно-посадочной полосы на 107 м. Находясь в этом местоположении, DDM регулируется как можно ближе к 0,155 (150 мкА). Далее дрон снова летит перпендикулярно центральной линии в третье местоположение по другую сторону взлетно-посадочной полосы на 107 м. В этом третьем местоположении проверяется линейность LOC. Кроме того, дрон может летать по вертикальному профилю непосредственно над центральной линией у конца порога взлетно-посадочной полосы для проверки профиля возвышения курса LOC. Чтобы соответствовать зоне покрытия GS, которая измеряется относительно точки посадки и охватывает примерно до 7°, дрон может летать по вертикальному профилю от поверхности взлетно-посадочной полосы до 40 м над центральной линией у порога.
[00311] Кроме того, клиренс LOC должен быть проверен в диапазоне±35° от центральной линии и на расстоянии, близком к LOC. В этом диапазоне азимута DDM должен линейно изменяться от нуля до 0,155 в CSW LOC, а затем от этого увеличиваться до 180 мкА. Как только DDM достигает 180 мкА, он должен оставаться на этом уровне или выше в пределах ±35° по азимуту. Чтобы проверить это в пределах ограничений полета дрона, дрон должен лететь близко к LOC, но в регионе, где диаграмма направленности луча полностью сформирована. Этого можно добиться, зависнув над центральной линией в конце взлетно-посадочной полосы в 300 м от LOC, а затем пролетев перпендикулярно центральной линии ±210 м.
[00312] Чтобы пролететь через желаемый диапазон углов возвышения для измерения азимутального региона GPA, GPSW и GP, требуется серия полетов. Первый шаг заключается в настройке GPA (3°), по сути, полетев дроном в точку 4000 м от точки посадки по удлиненной центральной линии взлетно-посадочной полосы. Затем дрон помещают на высоту 209 м над точкой посадки на удлиненной взлетно-посадочной полосе в плоскости X-Y. Из таблицы 2, описанной выше, отклонение измерения угла в этом местоположении составляет ±0,0225°, что приводит к максимальной ошибке измерения ±1,6 м по высоте или размерности Z.
[00313] Для измерения GPSW дрон переместился бы на вторую высоту. В этой точке будут сделаны регулировки ширины сектора GP, а затем дрон перейдет на третью высоту. При переходе будет проверяться линейность GPSW. На третьей высоте можно проверить GPSW. В этом примере, поскольку дрон оснащен приемником ILS, способным одновременно проверять сигналы LOC и GP, данные от обоих SiS могут быть отправлены одновременно. Используя эти данные и зная местоположение дрона в пределах отклонений, можно одновременно измерить точность как LOC, так и GP.
[00314] Пока дрон находится на этой дальности, дрон может летать по вертикальному профилю, чтобы пролетать через диапазон углов сектора GP (см. фиг. 47). Например, если дрон снизится до высоты 50 м относительно удлиненной плоскости X-Y взлетно-посадочной полосы, а затем наберет высоту до 450 м, он будет пересекать углы GP от 0,72° до 6,42°, чего достаточно для характеристики сигнала GP на протяжении интересующих углов. Из приведенной выше таблицы 2 видно, что максимальная ошибка измерения составляет±1,6 м по высоте или размерности Z.
[00315] Другой способ выполнить пролет через желаемое угловое пространство состоит в том, чтобы зависнуть дроном на заданной высоте над точкой посадки взлетно-посадочной полосы на центральной линии, а затем лететь дроном на этой высоте в пределах досягаемости по удлиненной центральной линии, поддерживая эту высоту относительно удлиненной плоскости X-Y взлетно-посадочной полосы. Фиг. 48, рассмотренная выше, показывает результирующие углы возвышения к местоположению дрона для различных профилей высоты. Например, если дрон зависает на 100 м над порогом, а затем летит на дальность 1000 м, угол GS будет равен 5,74°. По мере того, как дрон удаляется вдоль удлиненной центральной линии взлетно-посадочной полосы, угол продолжает уменьшаться. На 4000 м отточки посадки угол к дрону составит примерно 1,43°. Можно было бы сделать несколько «разрезов» по возвышению путем удаляющегося полета дрона на одной высоте, а затем поднимая высоту на другой уровень для обратного полета.
[00316] Окончательный набор полетов может быть выполнен для проверки размера азимута и размера возвышения LOC и GP в точке 4000 м. В этом случае желательно одновременно тестировать сигналы LOC и GP. Это может быть достигнуто путем полета по диаграмме пересечения, как показано на фиг. 49 и обсуждалось выше. Полет по этой диаграмме позволяет дрону захватывать и сообщать данные как от LOC, так и от GP с разных азимутов и возвышений. Для угла глиссады, равного 3°, размеры возвышений равны от 0,76θ=2,28° до 1,24θ=3,72°. Размер азимута определяется половиной ширину сектора LOC±β, что в случае взлетно-посадочной полосы длиной 4000 м с отклонением на 300 м составляет 1,42°.
[00317] Ниже приводится краткий обзор полетов дрона, используемых для настройки и проверки характеристик курсового радиомаяка:
• Настраивающие полеты
ο Зависание дрона на 10-20 м над центральной линией взлетно-посадочной полосы у конца порога взлетно-посадочной полосы и регулировка диаграммы направленности антенны LOC, чтобы максимально приблизить DDM к нулю, но менее 0,42 мкА;
ο Зависнуть над центральной линией взлетно-посадочной полосы у порога на 10-20 м, затем лететь перпендикулярно центральной линии в одну сторону от взлетно-посадочной полосы на 107 м. Зависнуть в этой точке и отрегулировать DDM как можно ближе к 0,155 (150 мкА). Повторить на противоположной стороне. Снова пролететь всю длину пути, чтобы проверить, что SiS изменяется линейно от центральной линии до краев сектора LOC;
• Проверяющие полеты
ο Зависнув над центральной линией взлетно-посадочной полосы у порога, пролететь вертикальный профиль от нуля до 40 м, чтобы проверить диаграмму возвышения LOC;
ο Сигнал LOC в пространстве (SiS) должен быть проверен в диапазоне ±35°. В этом диапазоне азимута DDM должен линейно изменяться от нуля до 0,155 в CSW LOC, а затем от него до 180 мкА. Как только DDM достигает 180 мкА, он должен оставаться на этом уровне или выше в пределах ±35° по азимуту. Чтобы проверить это в пределах ограничений полета дрона, дрон должен лететь близко к LOC, но в регионе, где диаграмма направленности луча полностью сформирована. Этого можно добиться путем зависания над центральной линией в конце взлетно-посадочной полосы в 300 м от LOC, а затем путем пролета перпендикулярно центральной линии ±210 м.
[00318] Ниже приводится краткий обзор полетов дрона, используемых для настройки и проверки характеристик глиссады:
• Настраивающие полеты
ο Подлететь дроном к точке 4000 м вдоль удлиненной центральной линии взлетно-посадочной полосы на высоте 209 м над удлиненной плоскостью X-Y взлетно-посадочной полосы. Измерить и отрегулировать DDM как можно ближе к нулю, но менее 4,7 мкА для GPA (3°). Измерить сигналы GPA и LOC для проверки SiS;
ο На 4000 м отточки посадки для измерения GPSW дрон перемещают из местоположения 1 в местоположение 3, как показано на фиг. 64. В этой точке сделать регулировки ширины сектора GP, а затем дрон перемещают в точку 2. В точке 2 можно проверить GPSW.
• Проверяющие полеты
ο На 4000 м пролететь по вертикальному профилю от 50 м до 450 м, просматривая углы от 0,72° до 6,42° и измеряя диаграмму возвышения GP;
ο Полет по диаграмме, показанной на фиг. 49, позволяет дрону захватывать и сообщать данные как от LOC, так и от GP с разных азимутов и возвышений. Для угла глиссады, равного 3°, размеры возвышений равны от 0,76θ=2,28° до 1,24θ=3,72°. Размер азимута определяется половиной ширины сектора LOC±β, что в случае взлетно-посадочной полосы длиной 4000 м с отступом 300 м составляет ±1,42°.
ο Зависнуть дроном на 100 м над центральной линией взлетно-посадочной полосы у порога, затем лететь дроном на этой высоте над удлиненной плоскостью X-Y взлетно-посадочной полосы в пределах досягаемости, чтобы пройти через интересующие углы GP. Можно было бы сделать несколько «разрезов» по возвышению путем удаляющегося полета дрона на одной высоте, а затем поднимая высоту на другой уровень для обратного полета.
[00319] Ссылки: ICAO Doc 8071, Manual on Testing of Radio Navigation Aids Volume I - Testing of Ground-based Radio Navigation Systems, Fifth Edition 2018.
[00320] Ниже также представлены приведенные для примера варианты осуществления составляющих изобретение концепций, описанных выше.
[00321] Вариант осуществления 1. Портативная система посадки по приборам (PILS), содержащая:
множество антенных радиоблоков, причем каждый антенный радиоблок выполнен с возможностью генерирования радиочастотного (РЧ) сигнала для передачи его элементом антенны, непосредственно связанным с антенным радиоблоком;
глиссадный радиомаяк, содержащий антенную решетку без формирования изображения из элементов антенны, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков, при этом глиссадный радиомаяк выполнен с возможностью передачи в соответствующие антенные радиоблоки, непосредственно связанные с каждым элементом антенны антенной решетки без формирования изображения, параметров передачи для РЧ-сигналов, генерируемых соответствующими антенными радиоблоками, непосредственно связанными с каждым элементом антенны антенной решетки без формирования изображения;
курсовой радиомаяк, содержащий антенную решетку курсового радиомаяка из элементов антенны, причем каждый элемент антенны антенной решетки курсового радиомаяка непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков, при этом курсовой радиомаяк выполнен с возможностью передачи в соответствующие антенные радиоблоки, непосредственно связанные с каждым элементом антенны антенной решетки курсового радиомаяка, параметров передачи для РЧ-сигналов, генерируемых соответствующими антенными радиоблоками, непосредственно связанными с каждым элементом антенны антенной решетки курсового радиомаяка; и
систему управления, выполненную с возможностью передачи в курсовой радиомаяк или в глиссадный радиомаяк данных, используемых курсовым радиомаяком или глиссадным радиомаяком, для формирования параметров передачи для РЧ-сигналов, генерируемых множеством антенных радиоблоков.
[00322] Вариант осуществления 2. PILS по варианту осуществления 1, в которой параметры передачи включают один или более из следующего: мощность, индексы модуляции и фаза РЧ-сигнала для передачи элементом антенны.
[00323] Вариант осуществления 3. PILS по варианту осуществления 1, в которой антенная решетка без формирования изображения выполнена с возможностью размещения параллельно взлетно-посадочной полосе летательного аппарата; при этом антенная решетка курсового радиомаяка выполнена с возможностью сворачивания и расширения; и
при этом множество антенных радиоблоков, глиссадный радиомаяк, антенная решетка без формирования изображения, курсовой радиомаяк, антенная решетка курсового радиомаяка и система управления выполнены с возможностью транспортировки на грузовом поддоне перед развертыванием.
[00324] Вариант осуществления 4. Антенный радиоблок портативной системы посадки по приборам (PILS), содержащий: схему передачи, выполненную с возможностью:
приема сообщения, содержащего параметры передачи для радиочастотного (РЧ) сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком;
генерирования РЧ-сигнала с использованием параметров передачи
и
передачи РЧ-сигнала с использованием элемента антенны, непосредственно связанного с антенным радиоблоком.
[00325] Вариант осуществления 5. Антенный радиоблок по варианту осуществления 4, в котором схема передачи также выполнена с возможностью приема сообщения, содержащего параметры передачи, от курсового радиомаяка или от глиссадного радиомаяка PILS.
[00326] Вариант осуществления 6. Антенный радиоблок по варианту осуществления 4, также содержащий: схему приема, выполненную с возможностью:
приема РЧ-сигнала, переданного элементом антенны;
формирования данных измерений на основании принятого РЧ-сигнала и
передачи данных измерений курсовому радиомаяку или глиссадному радиомаяку PILS.
[00327] Вариант осуществления 7. Способ, выполняемый антенным радиоблоком портативной системы посадки по приборам (PILS), включающий:
прием сообщения, содержащего параметры передачи для радиочастотного (РЧ) сигнала, передаваемого с использованием элемента антенны, непосредственно связанного с антенным радиоблоком;
генерирование РЧ-сигнала с использованием параметров передачи и
передачу РЧ-сигнала с использованием элемента антенны, непосредственно связанного с антенным радиоблоком.
[00328] Вариант осуществления 8. Способ по варианту осуществления 7, в котором прием сообщения, содержащего параметры передачи, включает прием параметров передачи от курсового радиомаяка или от глиссадного радиомаяка PILS.
[00329] Вариант осуществления 9. Способ по варианту осуществления 7, также включающий:
прием РЧ-сигнала, переданного элементом антенны;
формирование данных измерений на основании принятого РЧ-сигнала и
передачу данных измерений одному из курсового маяка и глиссады PILS.
[00330] Вариант осуществления 10. Глиссадный радиомаяк портативной системы посадки по приборам (PILS), содержащий:
антенную решетку без формирования изображения, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS;
схему обработки, связанную с каждым соответствующим антенным радиоблоком, непосредственно связанным с соответствующим элементом антенны антенной решетки без формирования изображения, причем схема обработки выполнена с возможностью:
приема от системы управления PILS данных, используемых для формирования параметров передачи для радиочастотных (РЧ) сигналов, генерируемых множеством антенных радиоблоков;
формирования параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки без формирования изображения, на основе принятых данных и
передачи параметров передачи в антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения.
[00331] Вариант осуществления 11. Глиссадный радиомаяк по варианту осуществления 10, в котором антенная решетка без формирования изображения выполнена с возможностью размещения параллельно взлетно-посадочной полосе летательного аппарата.
[00332] Вариант осуществления 12. Способ, выполняемый глиссадным радиомаяком портативной системы посадки по приборам (PILS), причем глиссадный радиомаяк содержит антенную решетку без формирования изображения, причем каждый элемент антенны антенной решетки без формирования изображения непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS, причем способ включает:
прием от системы управления PILS данных, используемых для формирования параметров передачи для радиочастотных (РЧ) сигналов, генерируемых каждым соответствующим радиоблоком PILS;
формирование параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки без формирования изображения, на основе принятых данных и
передачу параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки без формирования изображения.
[00333] Вариант осуществления 13. Курсовой радиомаяк портативной системы посадки по приборам (PILS), содержащий:
антенную решетку, причем каждый элемент антенны антенной решетки непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS;
схему обработки, связанную с каждым соответствующим антенным радиоблоком, непосредственно связанным с соответствующим элементом антенны антенной решетки, и выполненную с возможностью:
приема от системы управления PILS данных, используемых для формирования параметров передачи для радиочастотных (РЧ) сигналов, генерируемых каждым соответствующим антенным радиоблоком PILS;
формирования параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки, на основе принятых данных и
передачи параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки.
[00334] Вариант осуществления 14. Курсовой радиомаяк по варианту осуществления 13, в котором антенная решетка выполнена с возможностью сворачивания и расширения.
[00335] Вариант осуществления 15. Способ, выполняемый курсовым радиомаяком портативной системы посадки по приборам (PILS), причем курсовой радиомаяк содержит антенную решетку, причем каждый элемент антенны антенной решетки непосредственно связан с соответствующим антенным радиоблоком из множества антенных радиоблоков PILS, при этом способ включает:
прием от системы управления PILS данных, используемых для формирования параметров передачи для радиочастотных (РЧ) сигналов, генерируемых множеством антенных радиоблоков PILS;
формирование параметров передачи для РЧ-сигналов, передаваемых элементами антенны антенной решетки, на основе принятых данных и
передачу параметров передачи в соответствующие антенные радиоблоки для генерирования РЧ-сигналов для передачи их через элементы антенны антенной решетки.
[00336] Вариант осуществления 16. Система управления портативной системой посадки по приборам (PILS), содержащая:
приемопередатчик, выполненный с возможностью связи с системой беспилотного летательного аппарата (UAS);
процессор и
память, содержащую исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором следующих действий:
прием, от UAS с использованием приемопередатчика, данных измерений, связанных с первыми радиочастотными (РЧ) сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS;
генерирование данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи, используемых антенными радиоблоками PILS, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения; и
передача в курсовой радиомаяк или в глиссадный радиомаяк данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи.
[00337] Вариант осуществления 17. Система управления по варианту осуществления 16, в которой память содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором дополнительных операций:
передача, в UAS с использованием приемопередатчика, инструкции выполнить полет в конкретные местоположения относительно взлетно-посадочной полосы летательного аппарата, совмещенной с PILS, и получение данных измерений, связанных со вторыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком;
прием, от UAS с использованием приемопередатчика, полученных данных измерений в ответ на передачу инструкции; и
определение, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений.
[00338] Вариант осуществления 18. Система управления по варианту осуществления 17, в которой память содержит исполняемые инструкции, которые при их исполнении процессором вызывают выполнение процессором дополнительных операций:
определение того, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, основанном на полученных данных измерений;
генерирование данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания, используемых антенными радиоблоками, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решеткой без формирования изображения, для генерирования третьих РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения; и
передача в курсовой радиомаяк или в глиссадный радиомаяк данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания.
[00339] Вариант осуществления 19. Способ, выполняемый системой управления портативной системы посадки по приборам (PILS), включающий:
прием, от системы беспилотного летательного аппарата (UAS) с использованием приемопередатчика системы управления, данных измерений, связанных с первыми радиочастотными (РЧ) сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS;
генерирование данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи, используемых антенными радиоблоками PILS, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования вторых РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения; и
передачу в курсовой радиомаяк или в глиссадный радиомаяк данных, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи.
[00340] Вариант осуществления 20. Способ по варианту осуществления 19, также включающий:
передачу, в UAS с использованием приемопередатчика, инструкции выполнить полет в конкретное местоположение относительно взлетно-посадочной полосы летательного аппарата, совмещенной с PILS, и получение данных измерений, связанных со вторыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком;
прием, от UAS с использованием приемопередатчика, полученных данных измерений в ответ на передачу инструкции и
определение, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений.
[00341] Вариант осуществления 21. Способ по варианту осуществления 20, в котором определение, находятся ли параметры вторых РЧ-сигналов в диапазоне значений, основанном на полученных данных измерений, включает:
определение того, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, основанном на полученных данных измерений;
в ответ на определение того, что параметры вторых РЧ-сигналов не находятся в диапазоне значений, генерирование данных технического обслуживания, используемых курсовым радиомаяком или глиссадным радиомаяком для формирования параметров передачи технического обслуживания, используемых антенными радиоблоками, непосредственно связанными с соответствующими элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения, для генерирования третьих РЧ-сигналов, передаваемых элементами антенны антенной решетки курсового радиомаяка или антенной решетки без формирования изображения; и
передачу одному из курсового радиомаяка и глиссады данных технического обслуживания, которые должны использоваться одним из курсового маяка и глиссады для генерирования параметров передачи технического обслуживания.
[00342] Вариант осуществления 22. Способ по варианту осуществления 19, также включающий:
прием от измеряющего устройства, связанного с системой управления, информации, идентифицирующей расстояние между UAS и измеряющим устройством; и
определение местоположения UAS в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, на основе информации, идентифицирующей расстояние между UAS и измеряющим устройством.
[00343] Вариант осуществления 23. Способ по варианту осуществления 22, в котором измеряющее устройство содержит одно из следующего: радиолокационная система измерения, лазерная измерительная система слежения и транспондерная система измерения, связанную с измеряющим устройством.
[00344] Вариант осуществления 24. Способ по варианту осуществления 19, также включающий:
прием от измеряющего устройства, связанного с системой управления, информации, идентифицирующей расстояние между UAS и измеряющим устройством;
определение местоположения UAS в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, на основе информации, идентифицирующей расстояние между UAS и измеряющим устройством;
определение того, что UAS необходимо переместиться в другое местоположение в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, для получения данных измерений, связанных с первыми РЧ-сигналами, переданными курсовым радиомаяком или глиссадным радиомаяком PILS, на основе определенного местоположения UAS; и
передачу в UAS инструкции переместиться в другое местоположение в воздушном пространстве, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, и получение данных измерений в этом другом местоположении.
[00345] Вариант осуществления 25. Способ по варианту осуществления 24, в котором определение местоположения UAS в воздушном пространстве включает определение местоположения UAS в воздушном пространстве, в котором отсутствуют сигналы GPS, ближайшем к взлетно-посадочной полосе летательного аппарата, совмещенной с PILS, на основе информации, идентифицирующей расстояние между UAS и измеряющим устройством.
[00346] В соответствии с действующей конвенцией по патентному праву, грамматические показатели единственного числа при использовании в настоящей заявке, включая формулу изобретения, подразумевают «одно или более». Таким образом, например, ссылка на «объект» включает множество объектов, если контекст явно не противоречит этому (например, множество объектов) и так далее.
[00347] В настоящем описании и формуле изобретения термины «содержат», «содержит» и «содержащий» используются в неисключительном смысле, за исключением случаев, когда контекст требует иного. Аналогичным образом, термин «включать» и его грамматические варианты не являются ограничивающими, так что перечисление элементов в списке не исключает других подобных элементов, которые могут быть заменены или добавлены к перечисленным элементам.
[00348] Для целей настоящего описания и прилагаемой формулы изобретения, если не указано иное, все числа, выражающие количества, размеры, размерности, пропорции, формы, составы, параметры, проценты, количества вещества, характеристики и другие числовые значения, используемые в описании и пунктах формулы изобретения, следует понимать, как модифицируемые во всех случаях термином «приблизительно», даже если термин «приблизительно» может не появляться прямо со значением, количеством или диапазоном. Соответственно, если не указано иное, числовые параметры, упомянутые в настоящем описании и прилагаемой формуле изобретения, не являются и не должны быть точными, но могут быть приблизительными и/или большими или меньшими по желанию, отражая отклонения, коэффициенты пересчета, округления, погрешности измерения и т.п., а также другие факторы, известные специалистам в данной области техники, в зависимости от желаемых свойств, которые должны быть получены посредством раскрытого здесь предмета изобретения. Например, термин «приблизительно», когда он относится к значению, может означать, что он охватывает вариации, в некоторых вариантах осуществления ±100%, в некоторых вариантах осуществления ±50%, в некоторых вариантах осуществления ±20%, в некоторых вариантах осуществления ±10%, в некоторых вариантах осуществления ±5%, в некоторых вариантах осуществления ±1%, в некоторых вариантах осуществления ±0,5% и в некоторых вариантах осуществления ±0,1% от указанного количества, поскольку такие вариации подходят для выполнения раскрытых способов или применения раскрытых композиций.
[00349] Кроме того, термин «приблизительно», когда он используется в связи с одним или более числами, или числовыми диапазонами, следует понимать, как относящийся ко всем таким числам, включая все числа в диапазоне, и изменяет этот диапазон путем расширения границ выше и ниже указанных числовых значений. Указание числовых диапазонов по конечным точкам включает все числа, например, целые числа, включая их дроби, входящие в этот диапазон (например, перечисление от 1 до 5 включает 1, 2, 3, 4 и 5, а также их дроби, например, 1,5, 2,25, 3,75, 4,1 и т.п.) и любой диапазон в пределах этого диапазона.
[00350] Все публикации, патентные заявки, патенты и другие ссылки, упомянутые в настоящем описании, указывают на уровень специалистов в данной области техники, к которой относится настоящее изобретение. Все публикации, патентные заявки, патенты и другие ссылки включены в настоящий документ путем ссылки в той же степени, как если бы каждая отдельная публикация, патентная заявка, патент и другая ссылка были конкретно и отдельно указаны для включения путем ссылки. Следует понимать, что, несмотря на то, что здесь упоминается ряд патентных заявок, патентов и других ссылок, такая ссылка не является признанием того, что какой-либо из этих документов является частью общеизвестных знаний в данной области техники.
[00351] Несмотря на то, что вышеизложенный объект изобретения был описан довольно подробно посредством фигур и примеров для ясности понимания, специалистам в данной области техники будет понятно, что определенные изменения и модификации могут быть реализованы на практике в рамках объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННА И РЕШЕТКА ГЛИССАДЫ ДЛЯ СИСТЕМЫ ПОСАДКИ И ТОЧНОГО ЗАХОДА НА ПОСАДКУ НЕБОЛЬШИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2796476C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| СПОСОБ ФОРМИРОВАНИЯ, ИЗМЕРЕНИЯ ПАРАМЕТРОВ И ОБРАБОТКИ СИГНАЛОВ СИГНАЛА ДЛЯ ДВУХЧАСТОТНОЙ КУРСО-ГЛИССАДНОЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476989C1 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| Посадочная радиомаячная группа дециметрового диапазона длин волн | 2022 |
|
RU2801583C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
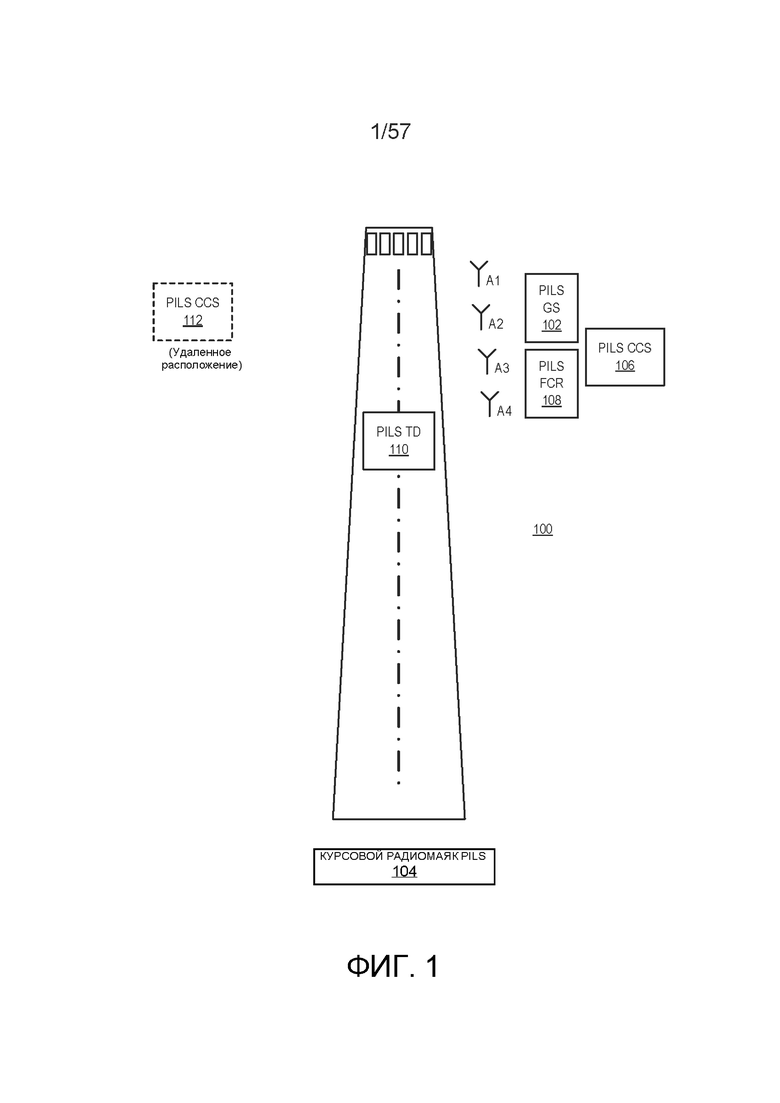
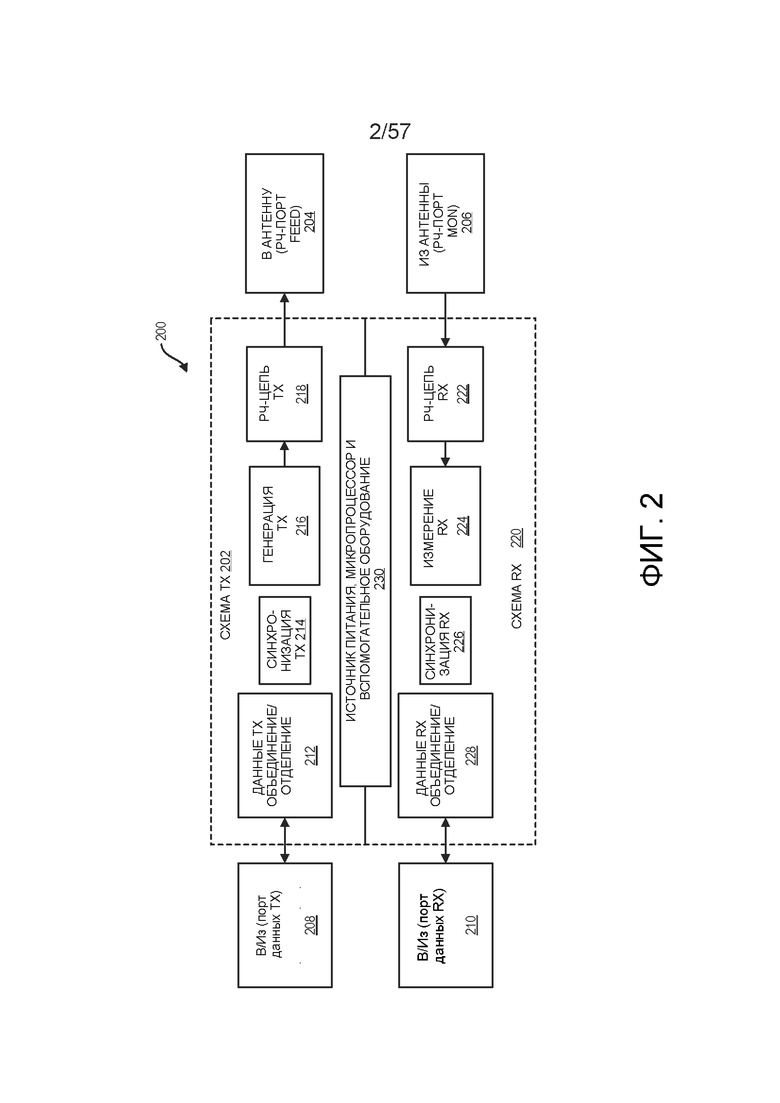
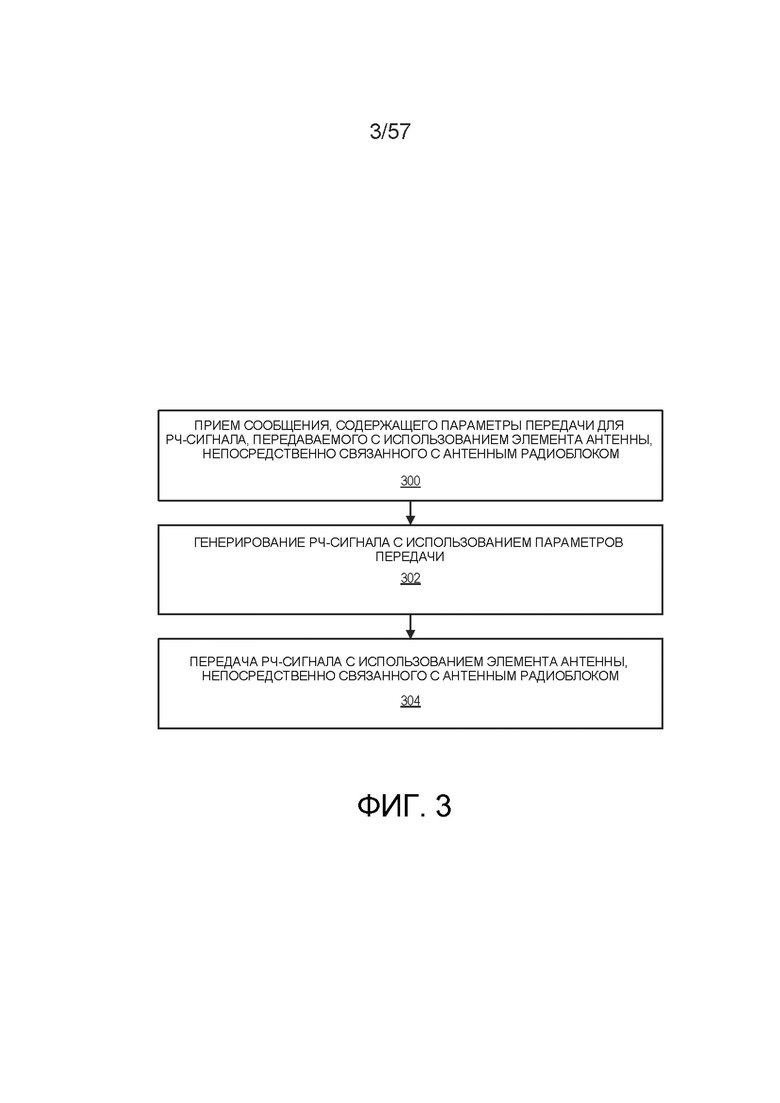
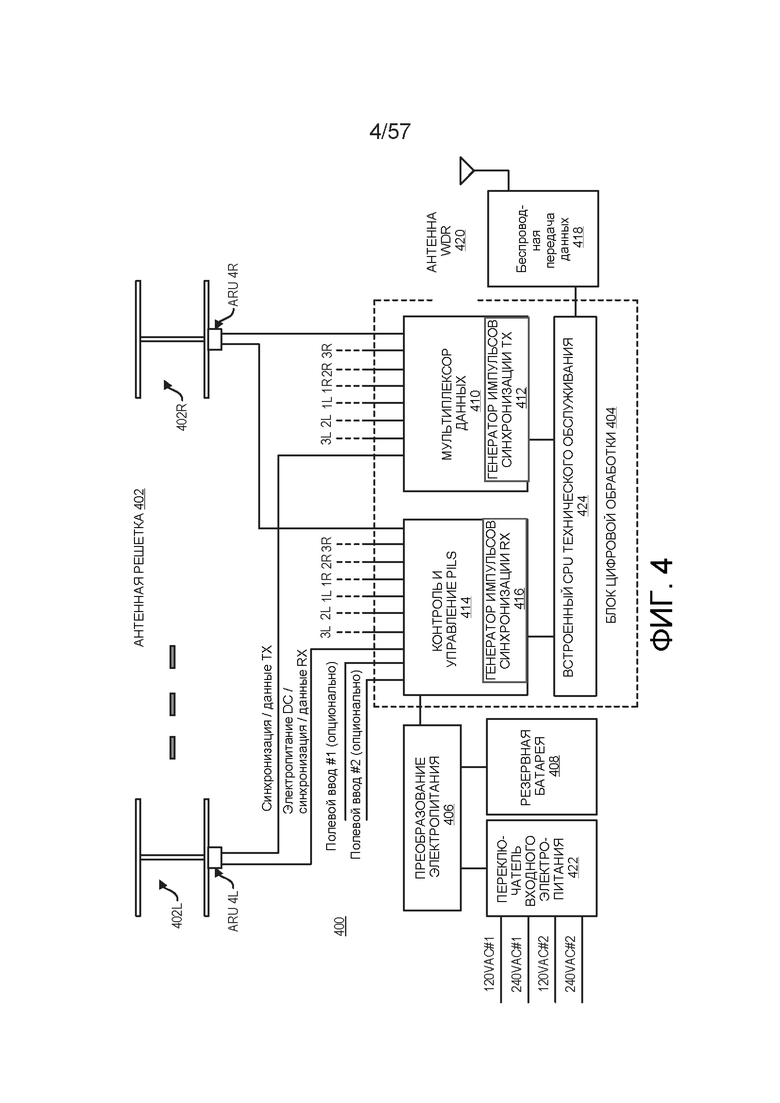
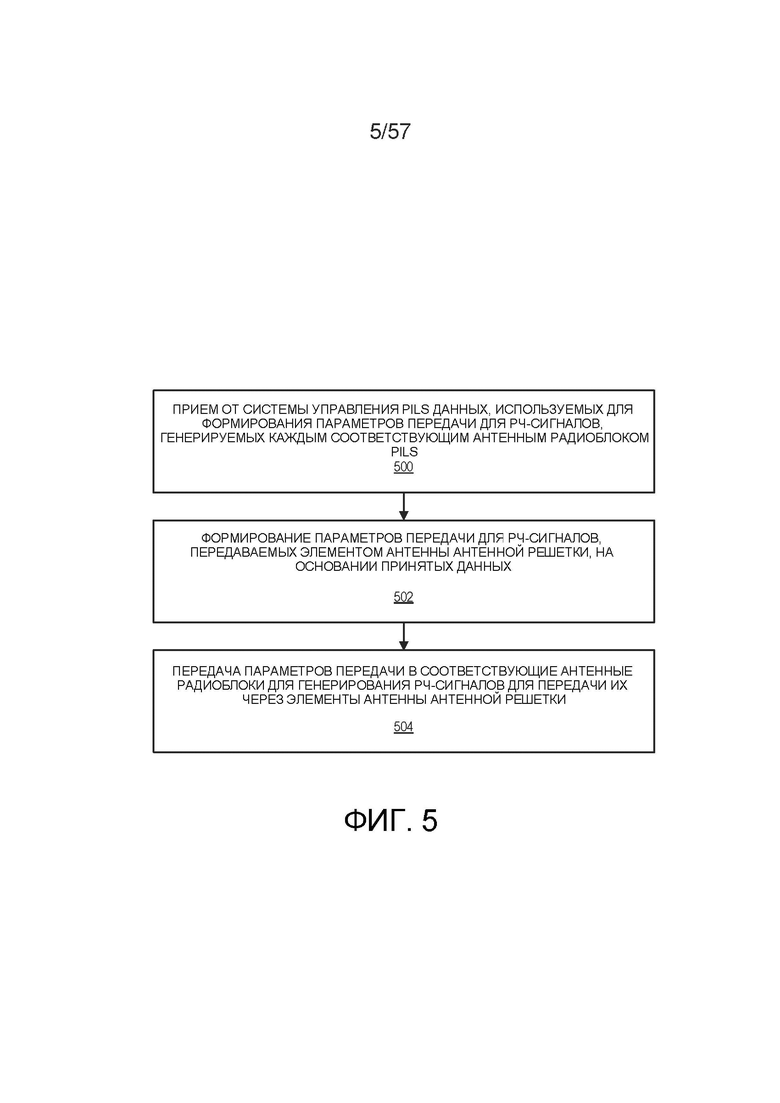
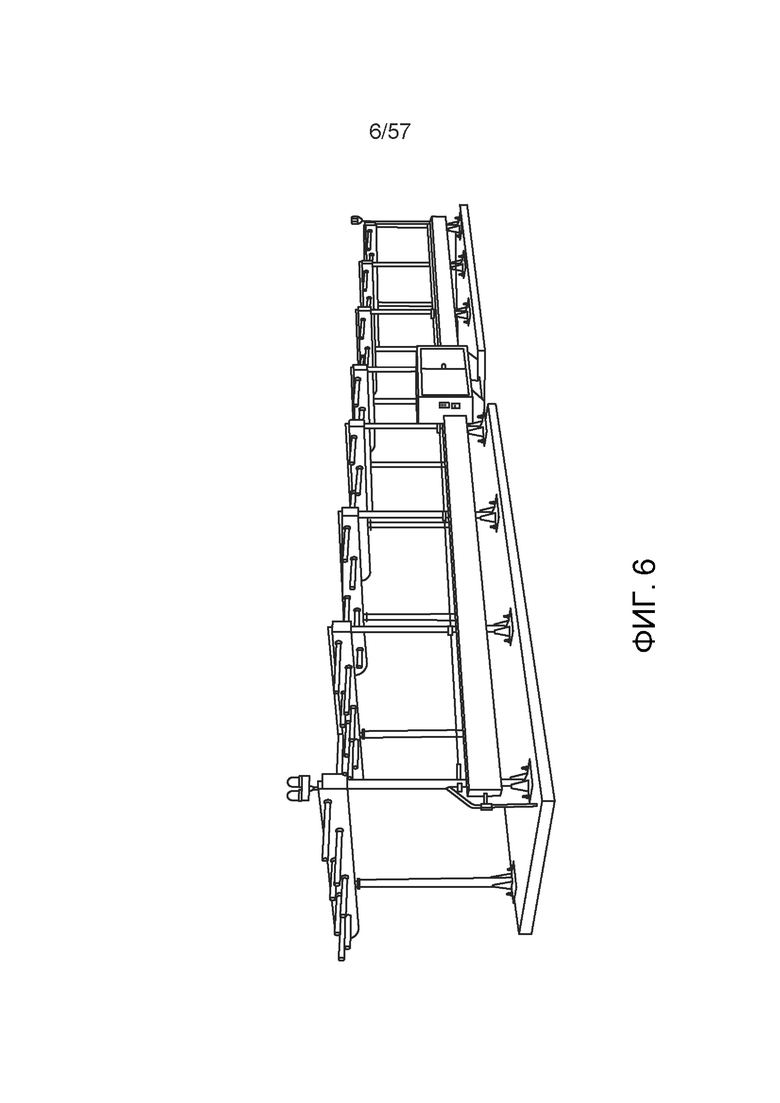
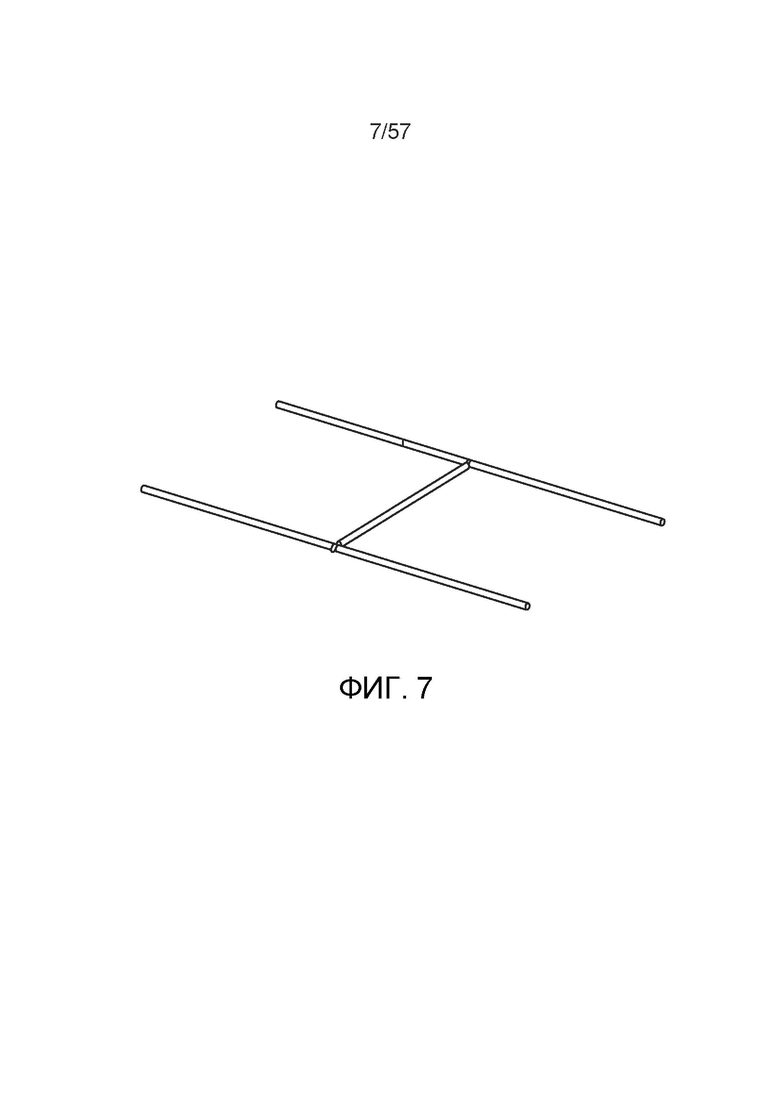
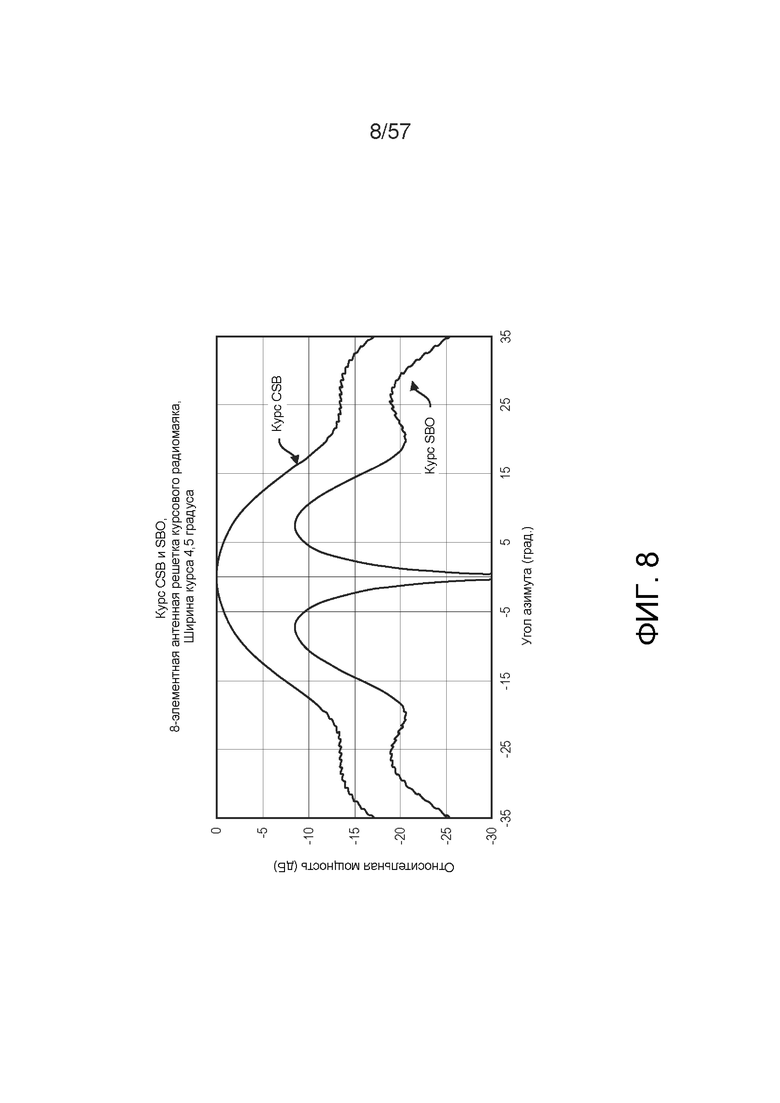
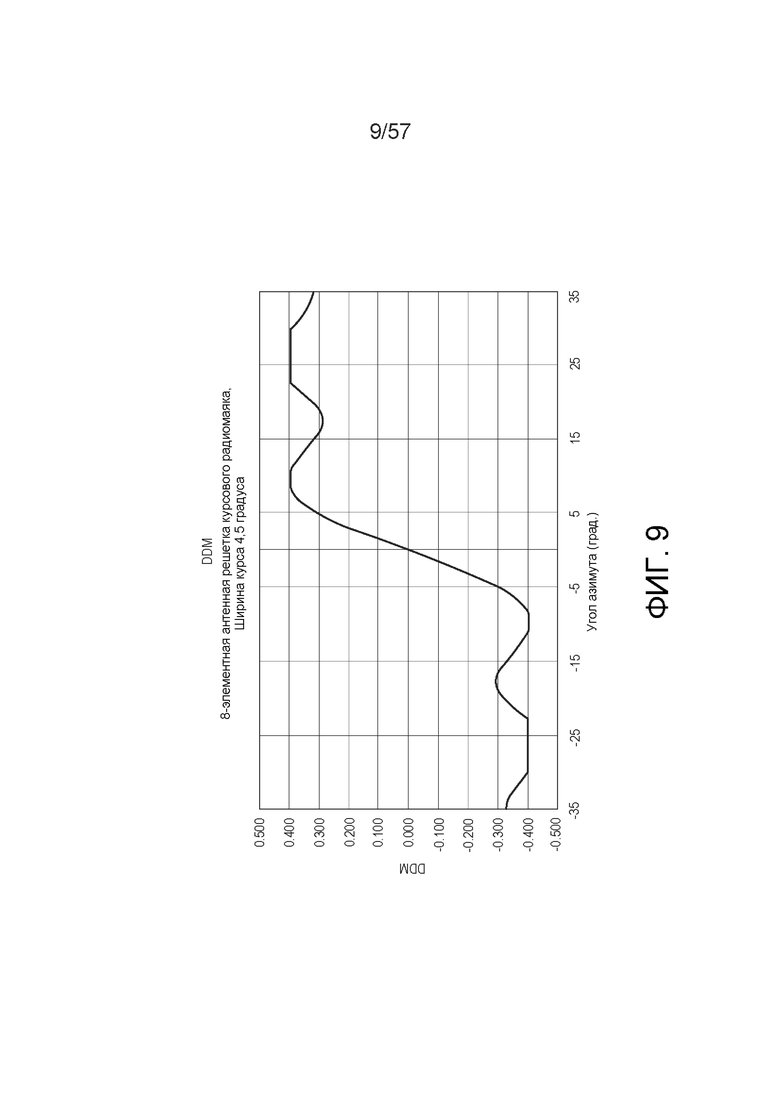
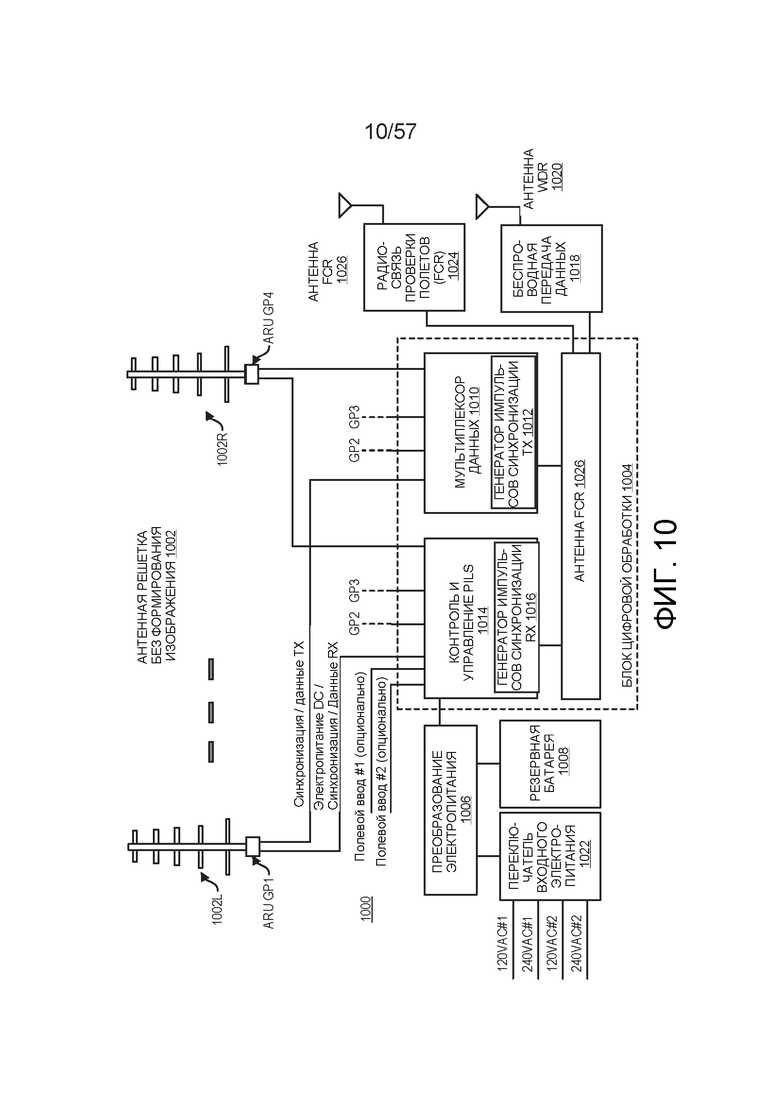
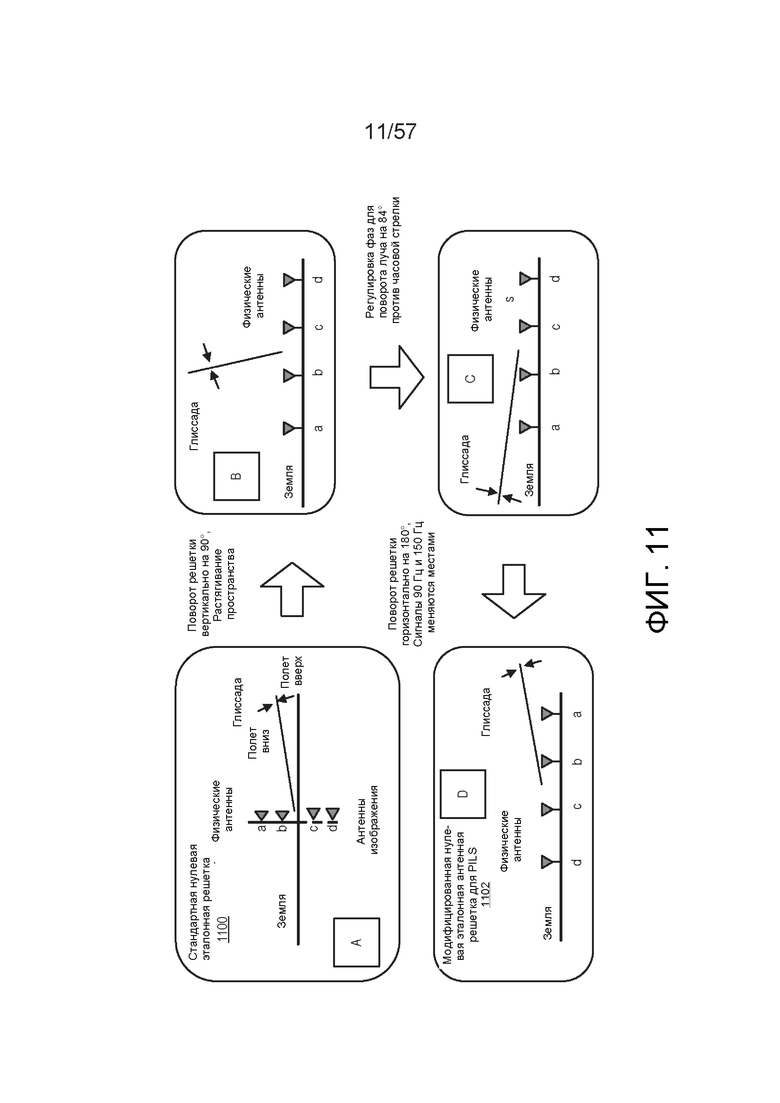
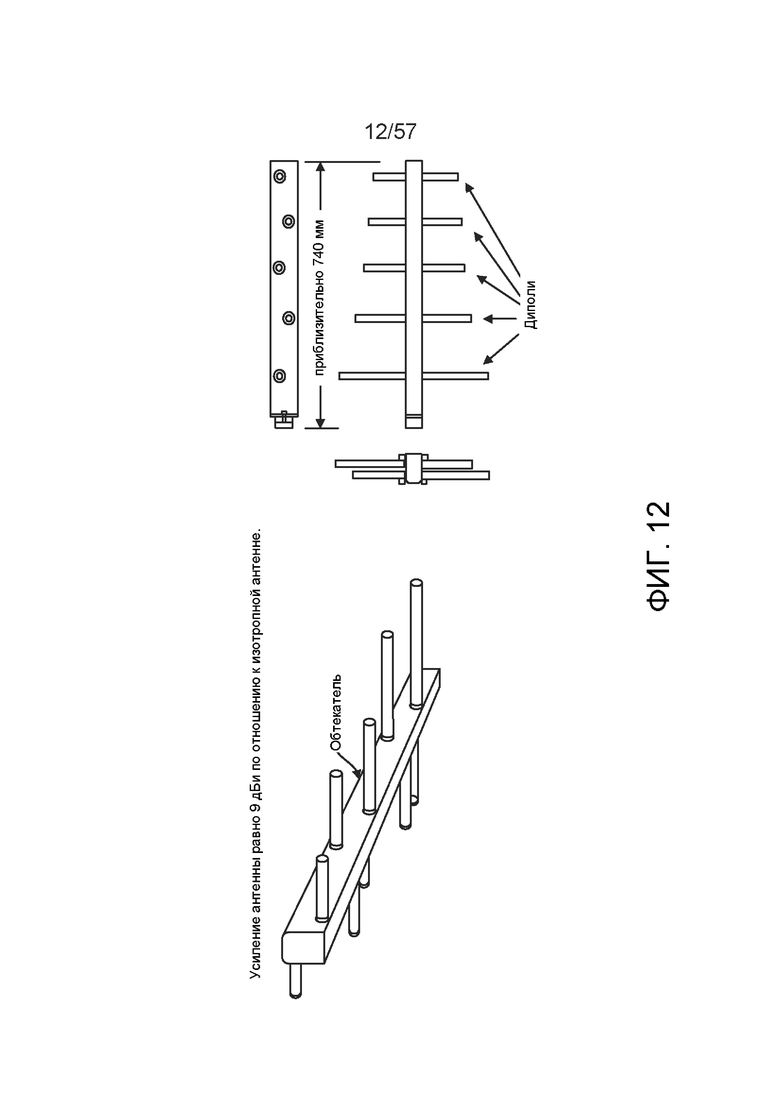
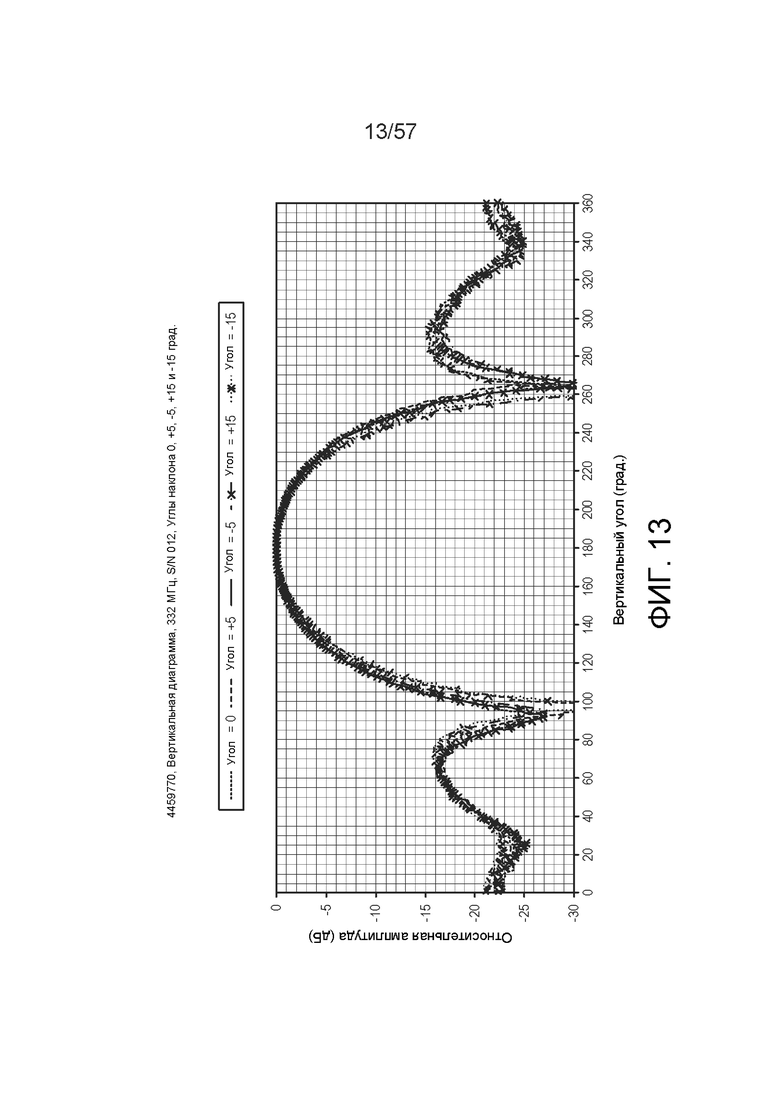
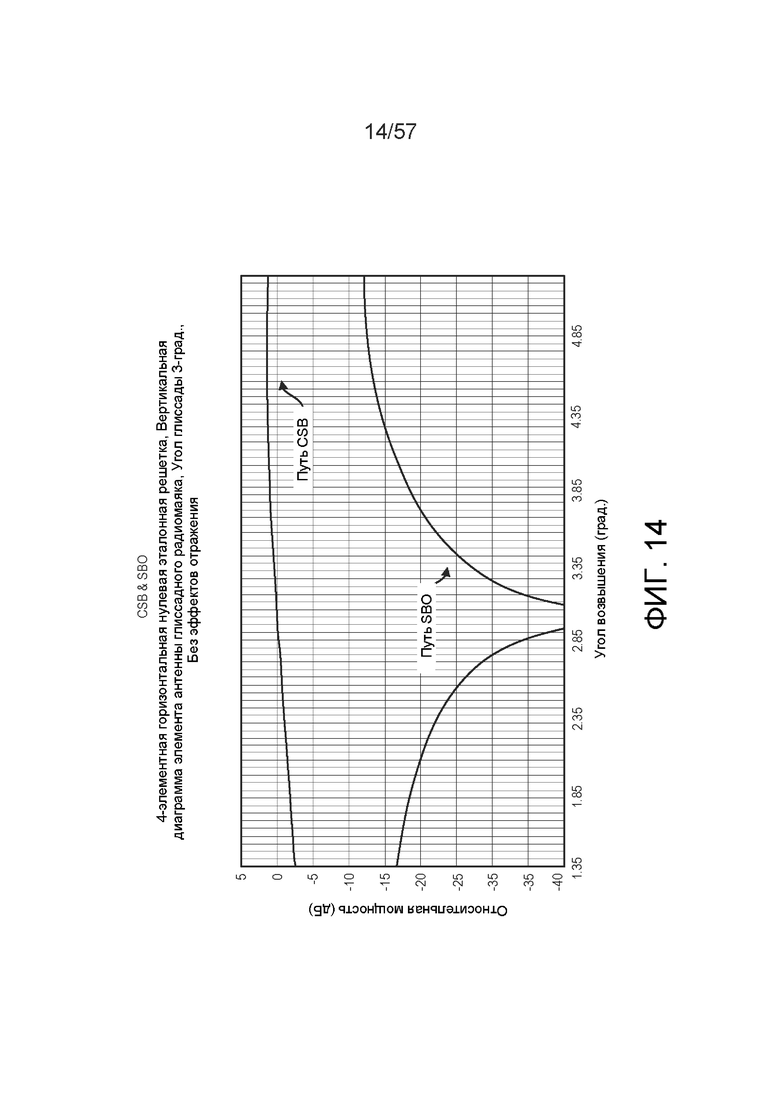
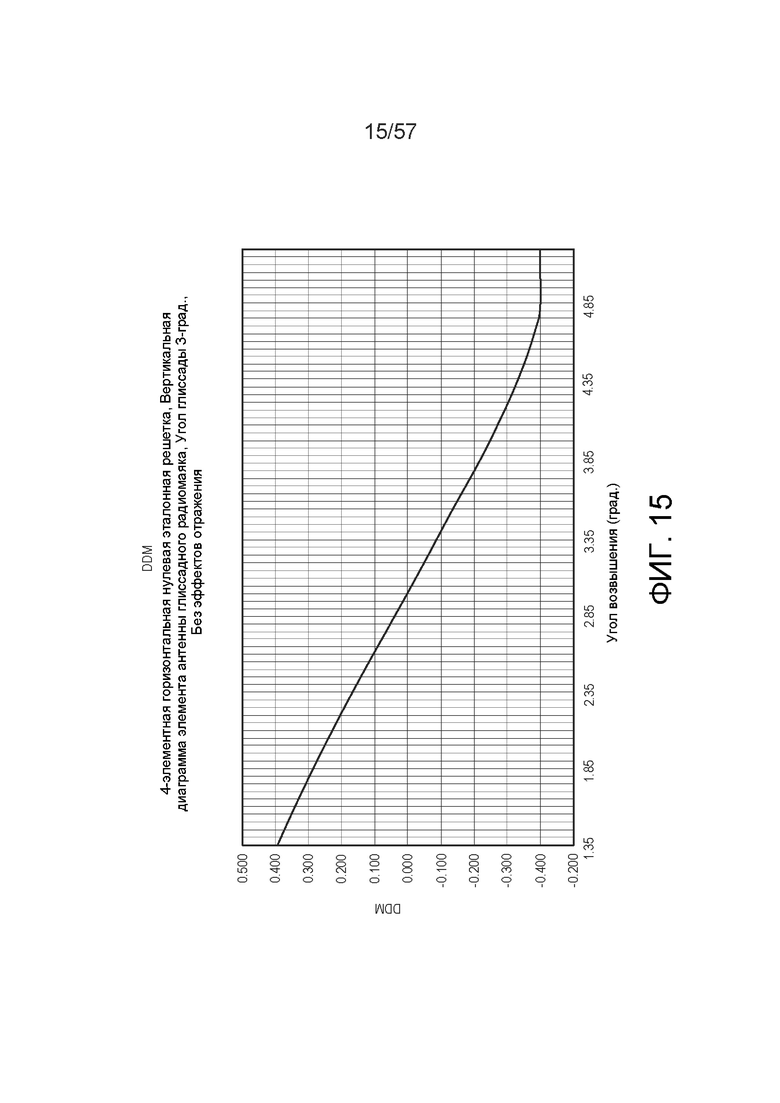
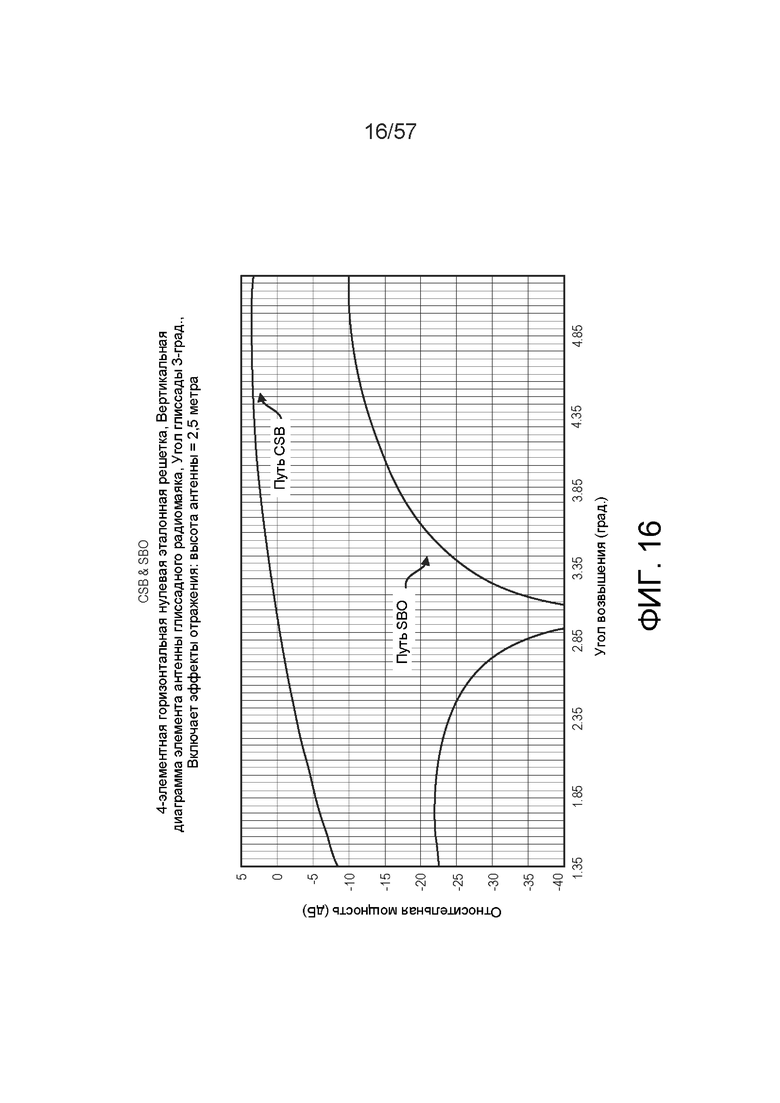
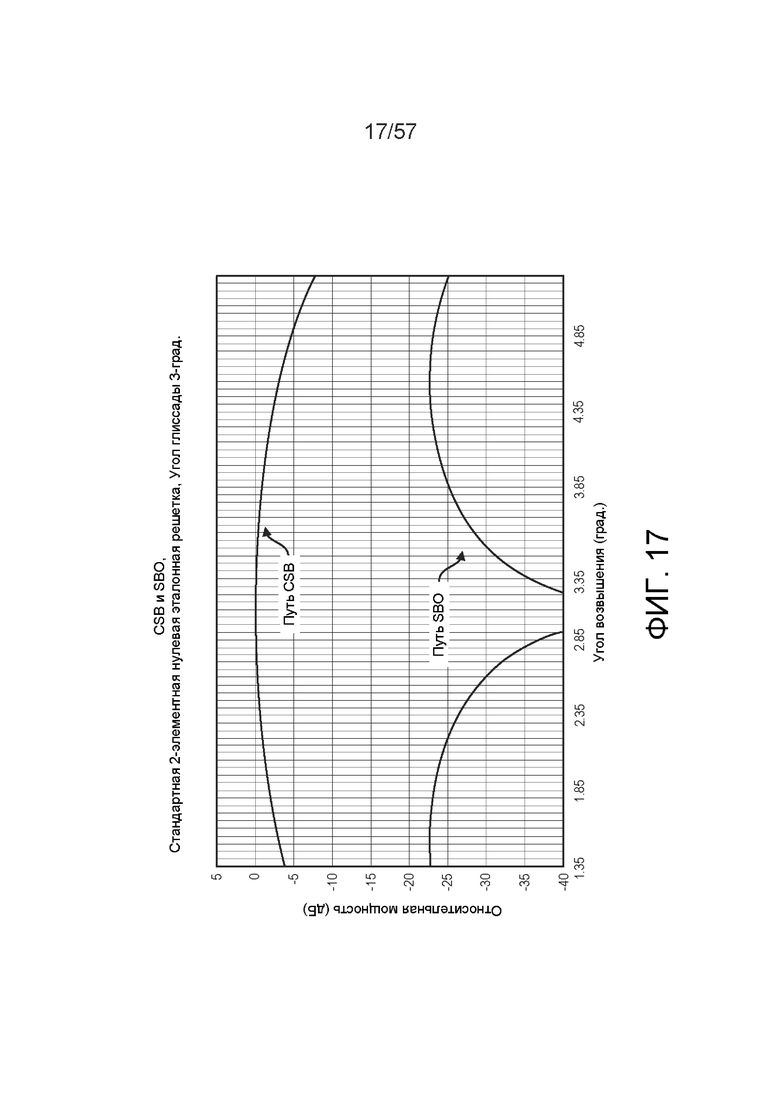
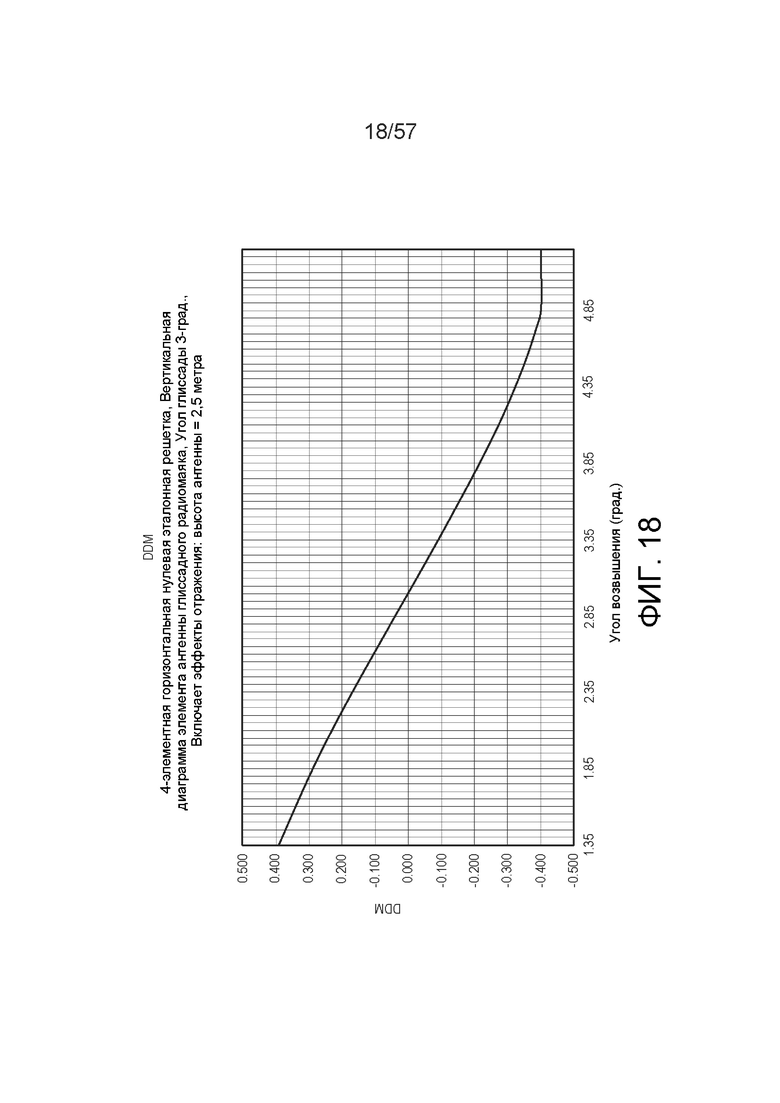
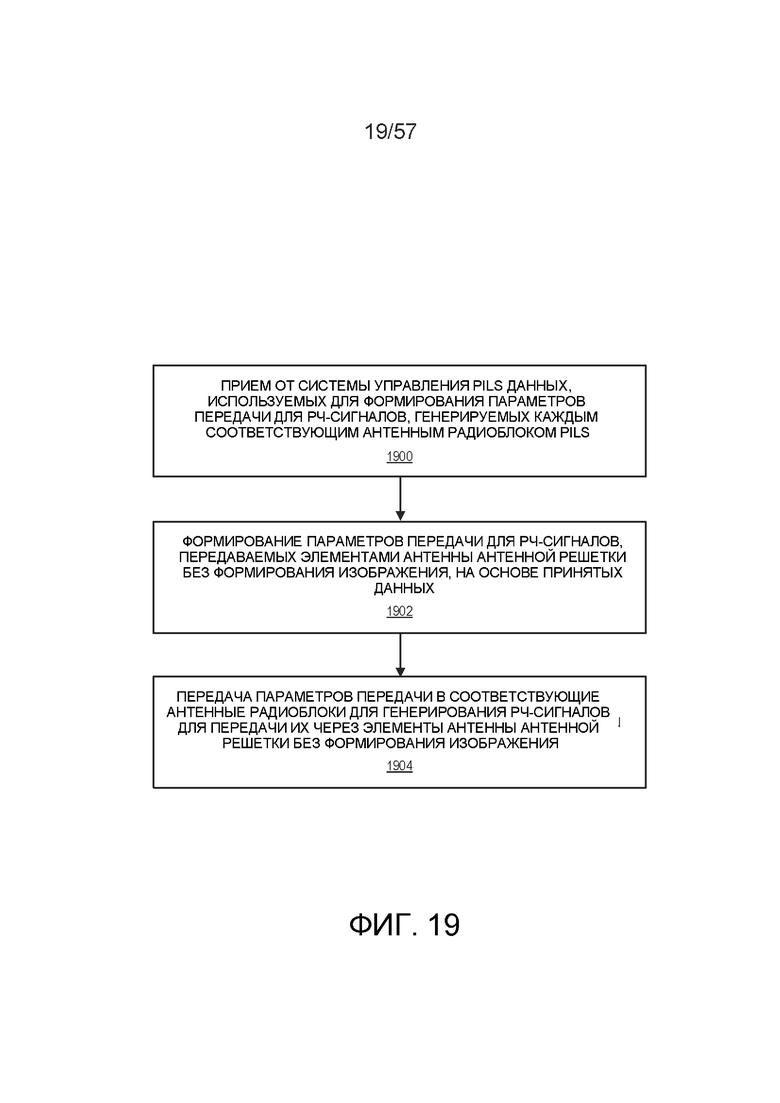
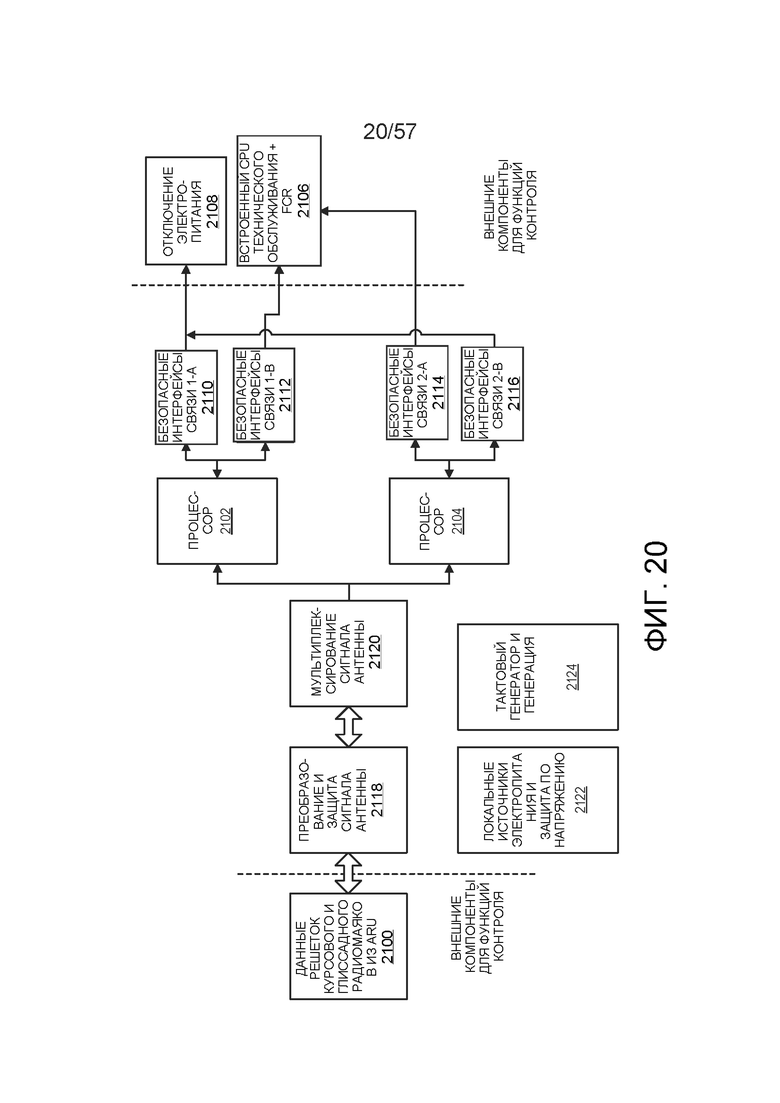

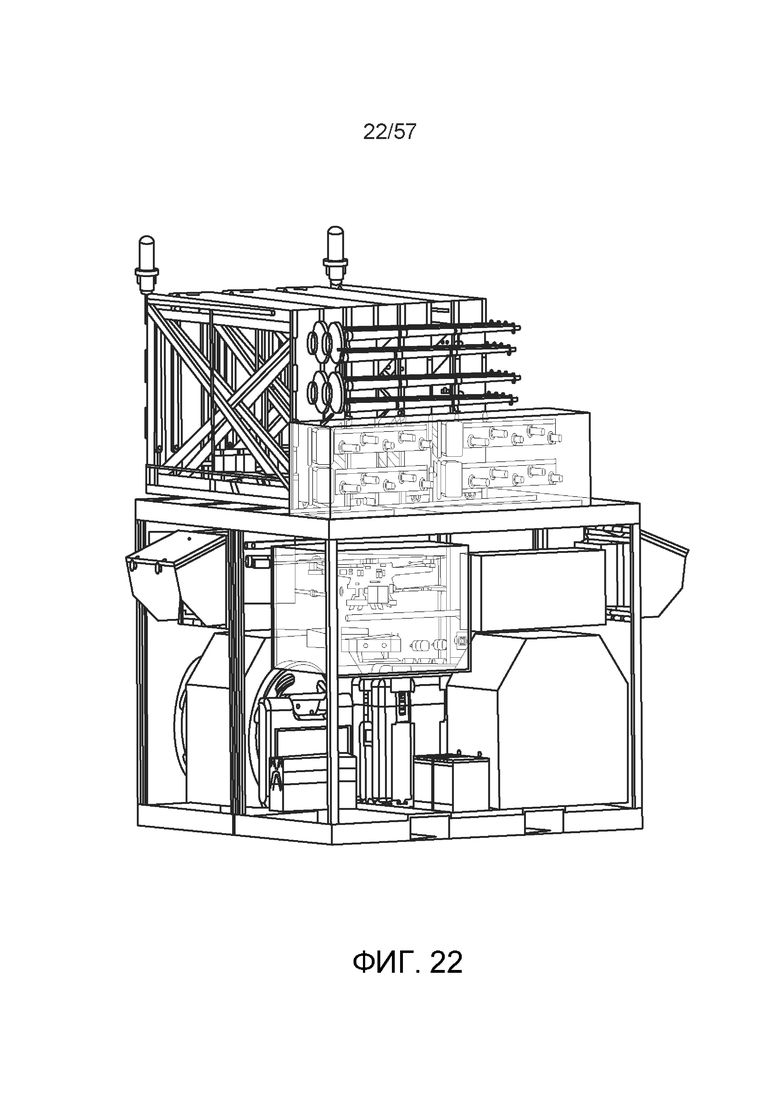
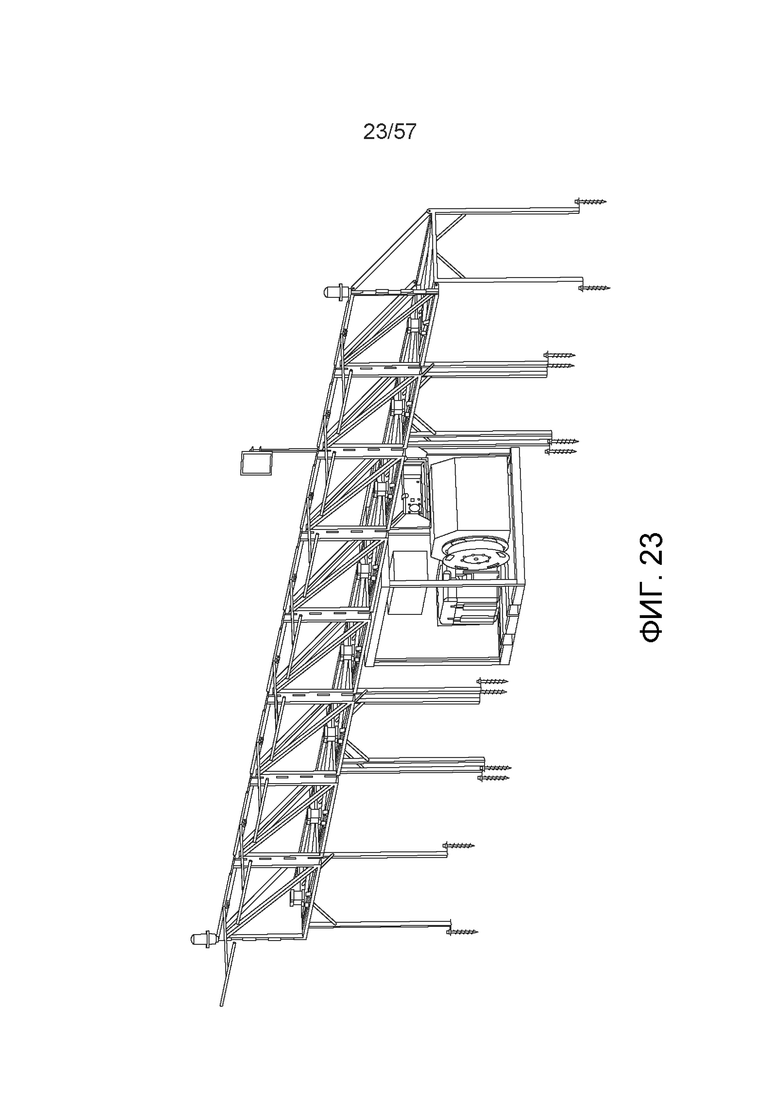
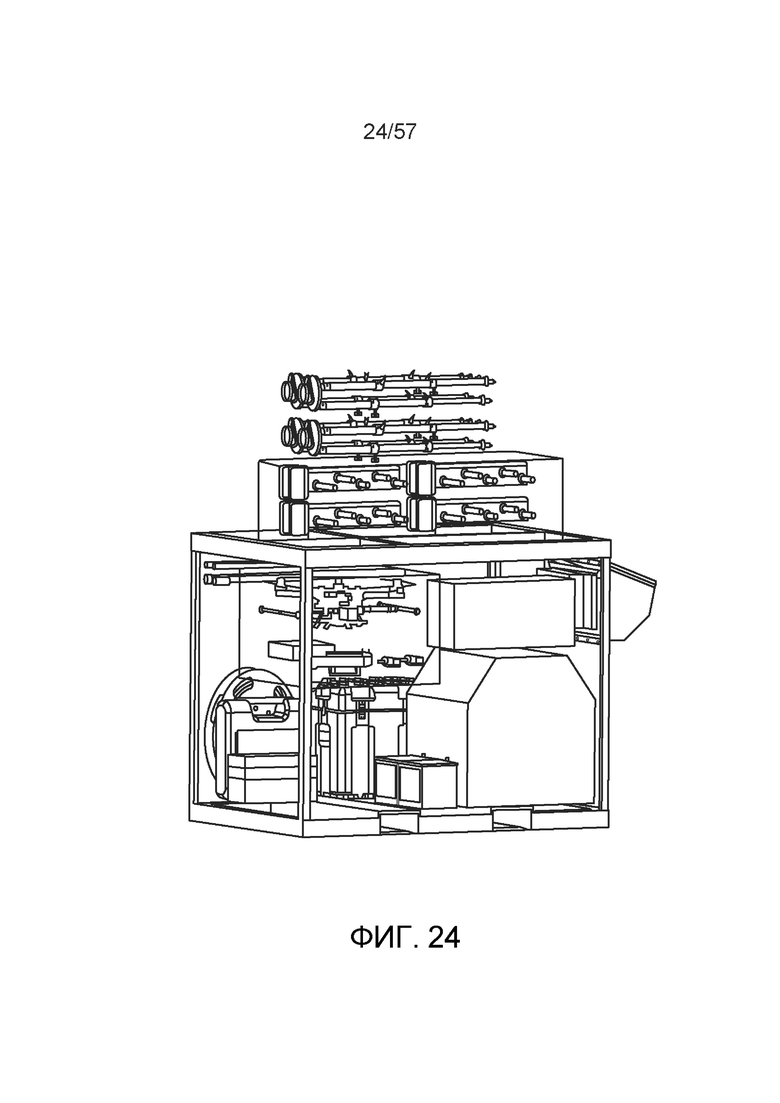
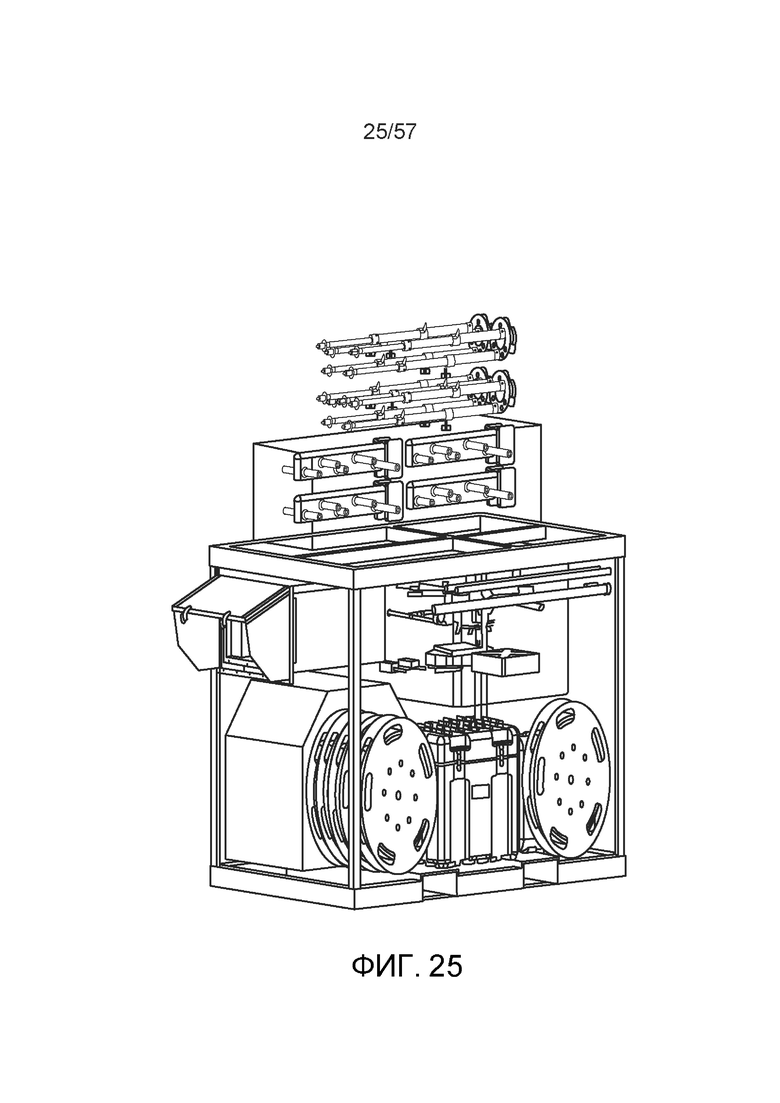
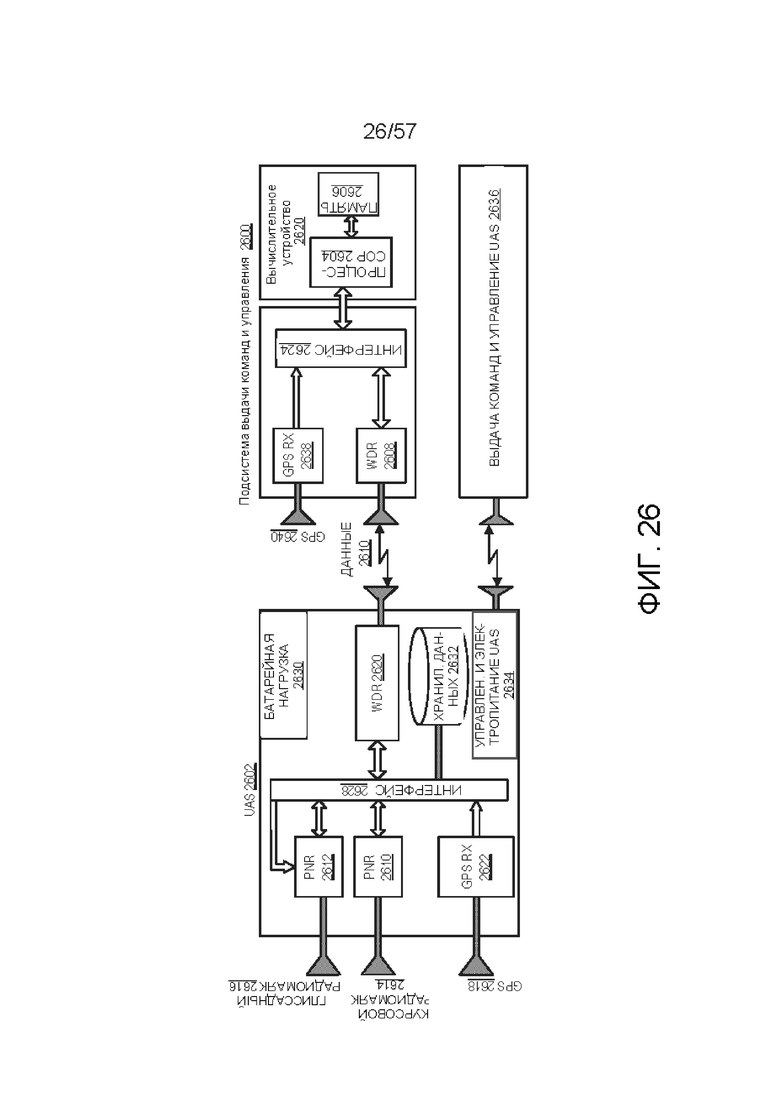
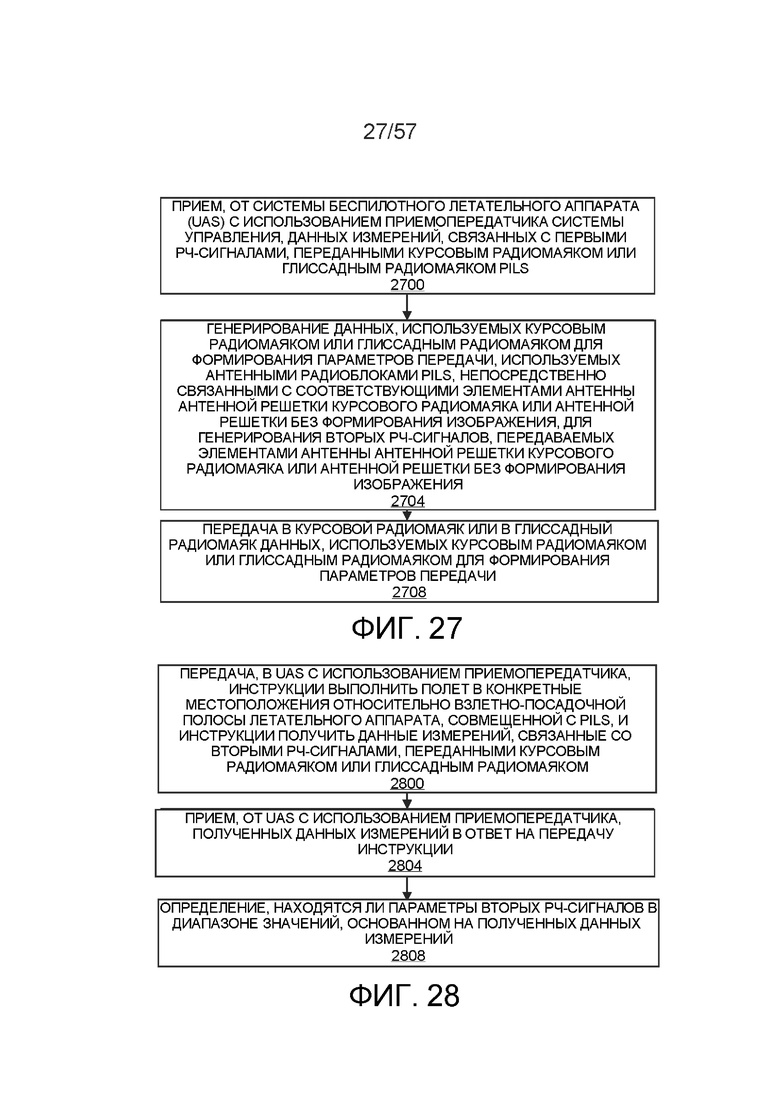
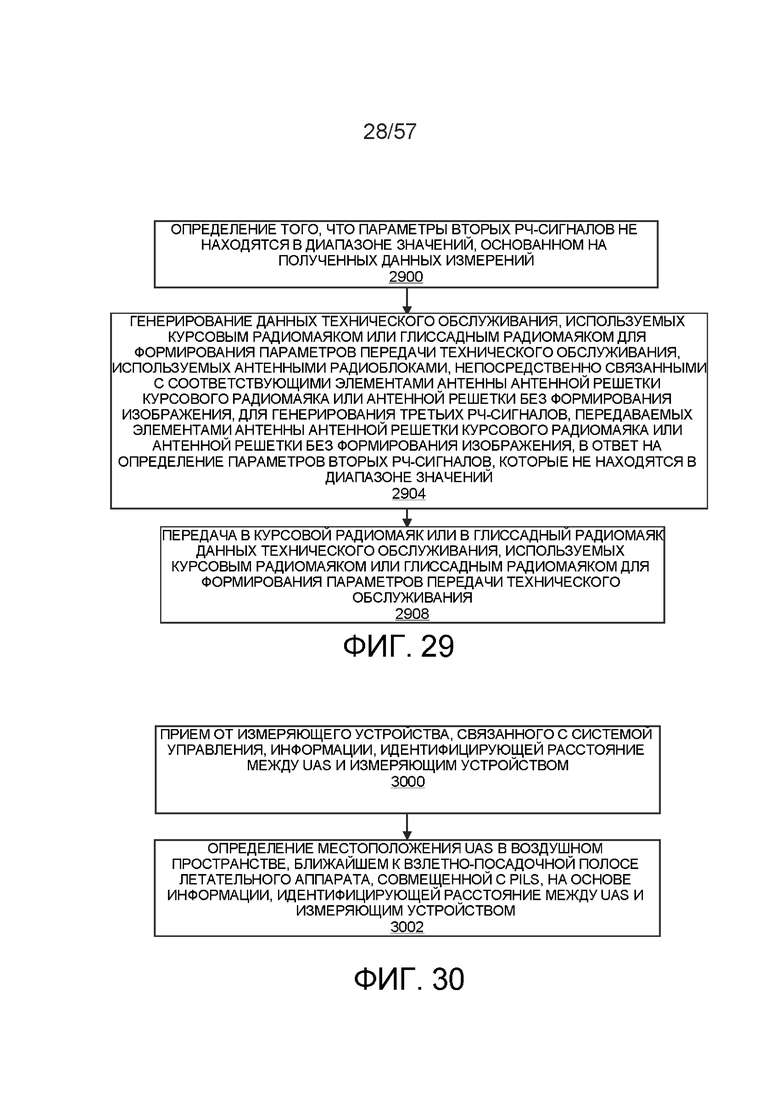
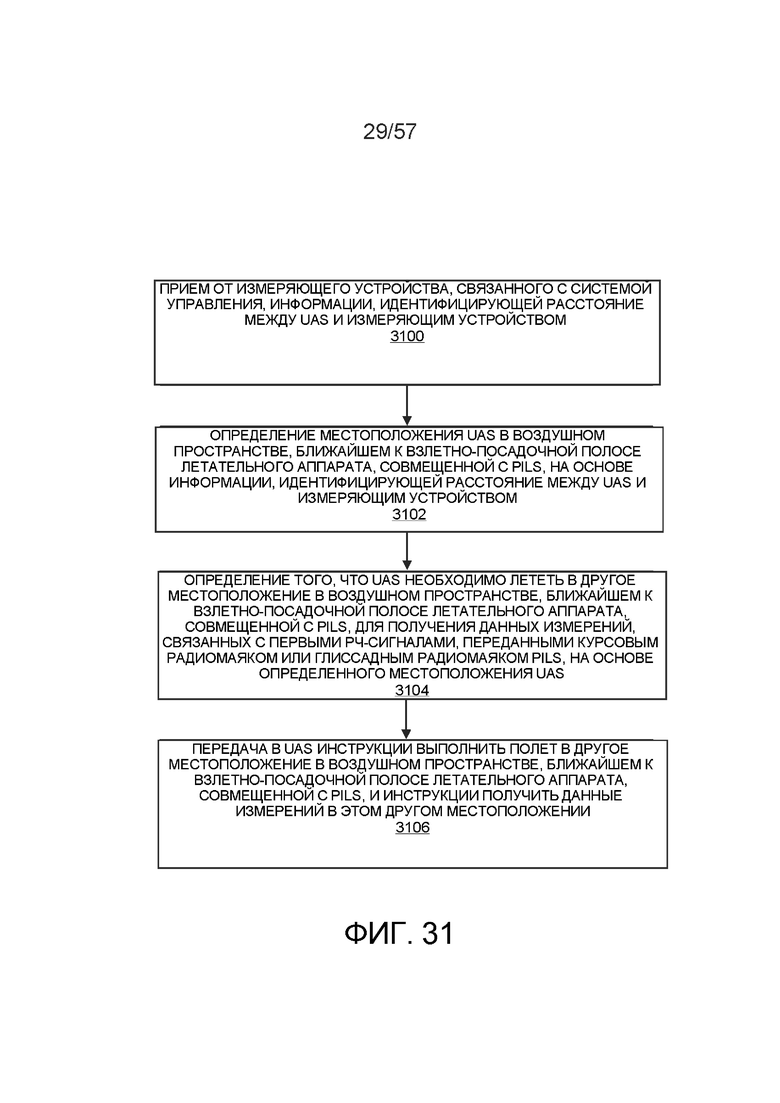
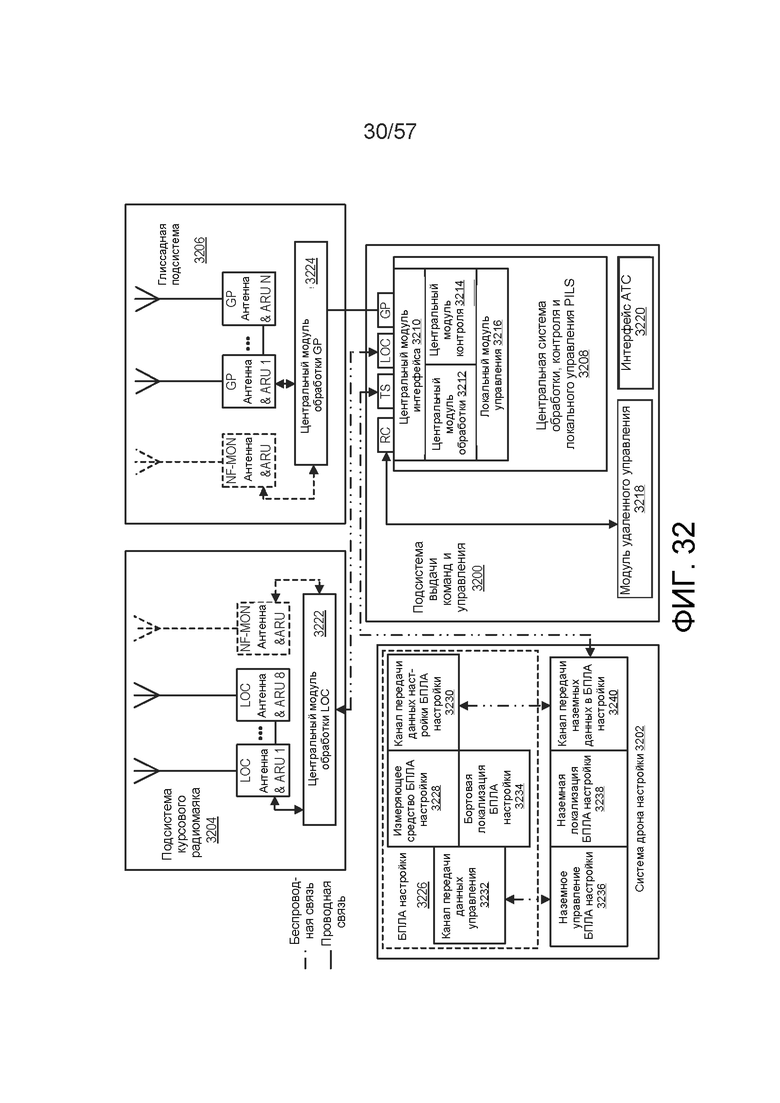
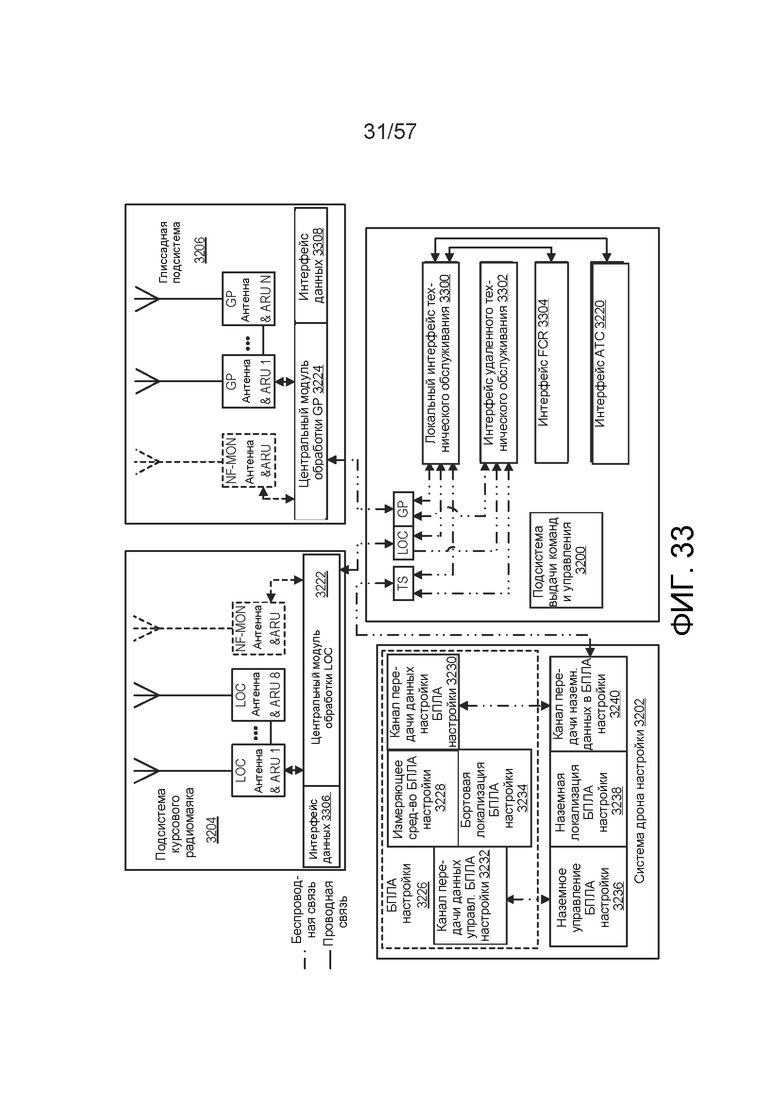
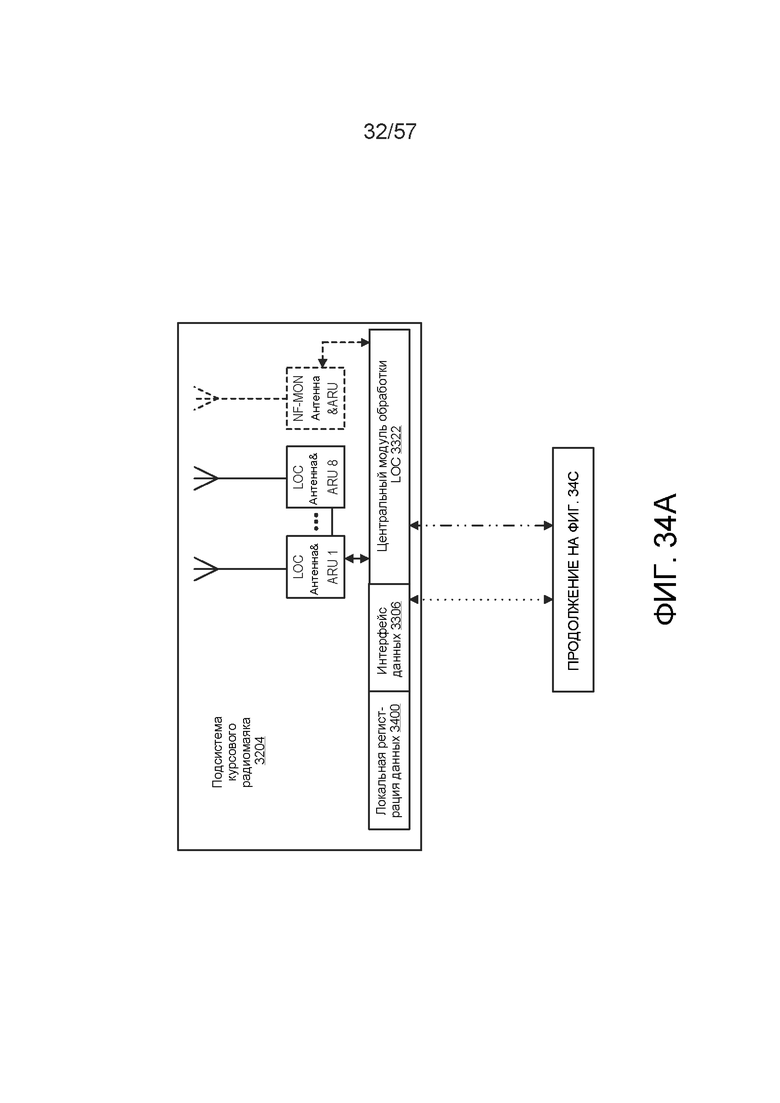
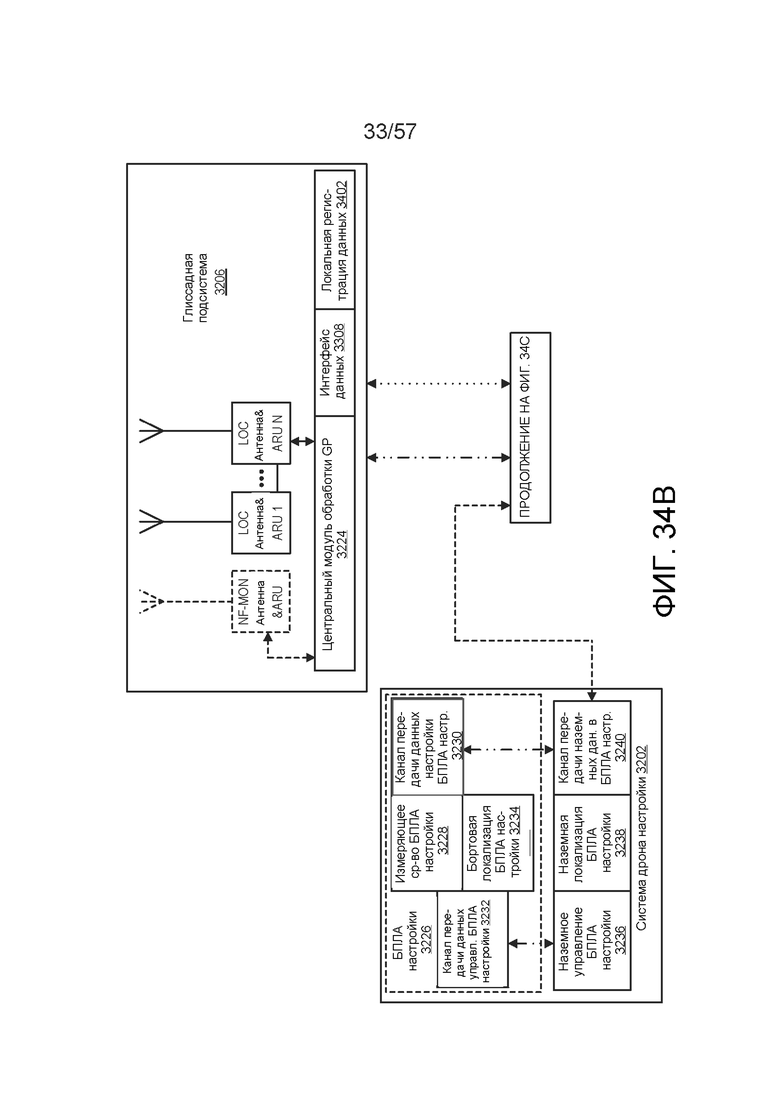
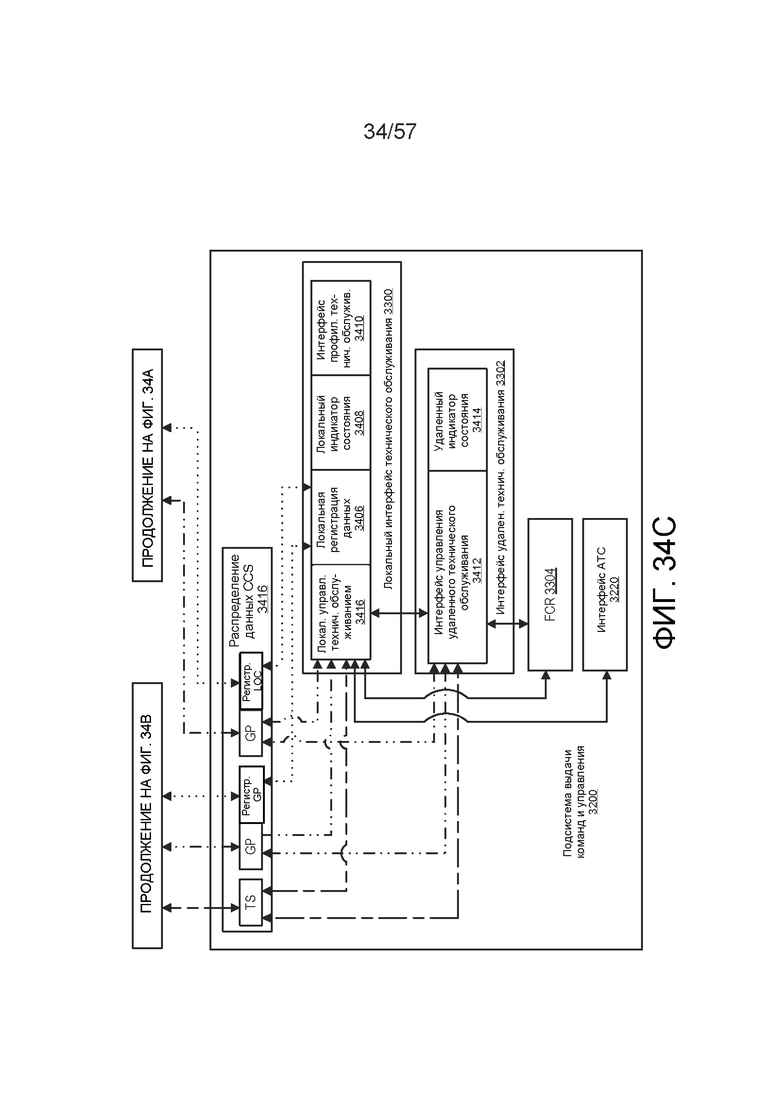
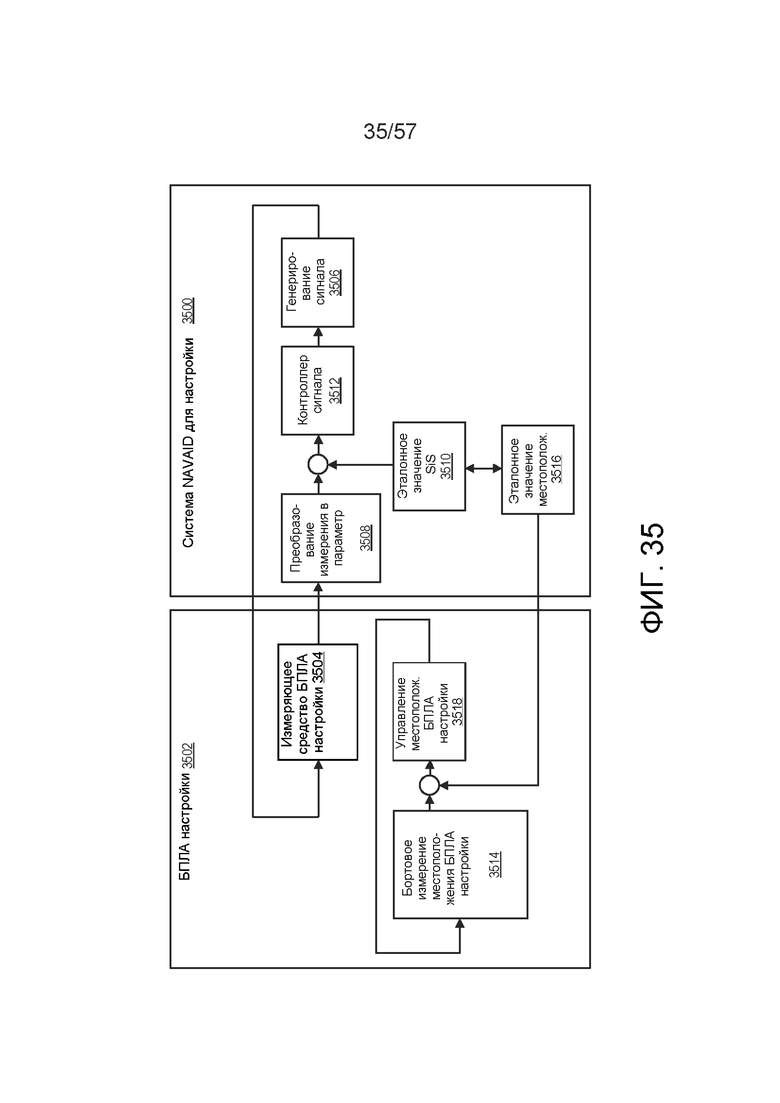
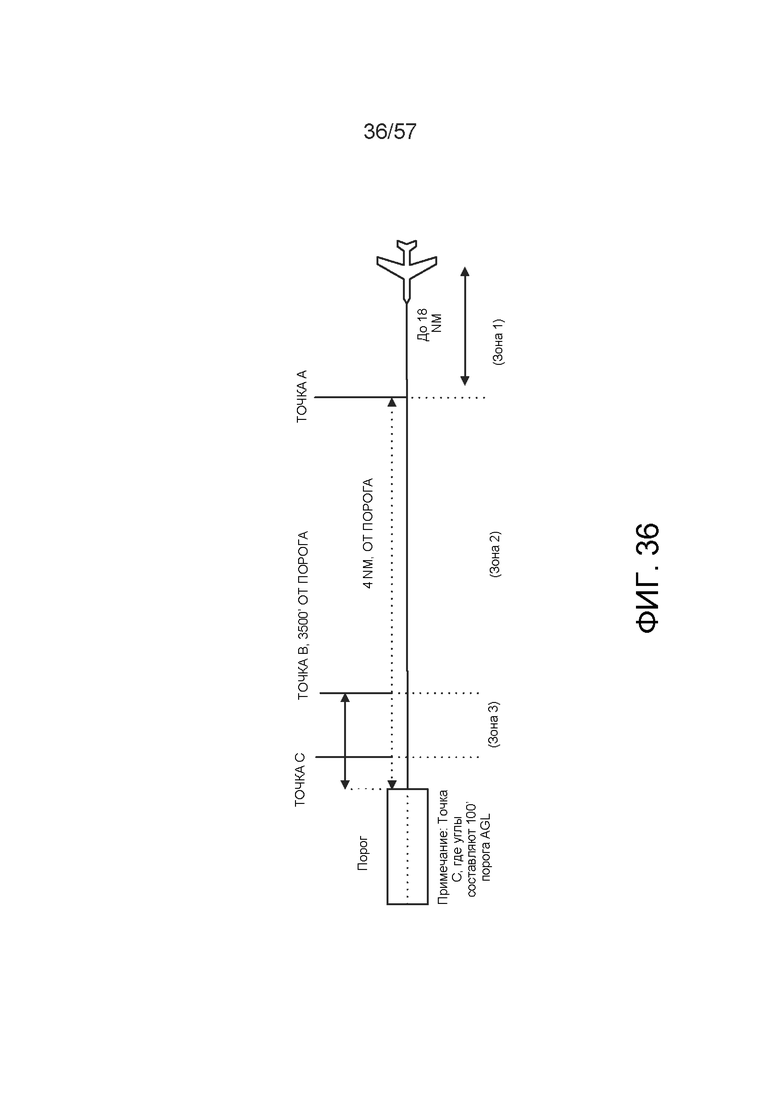
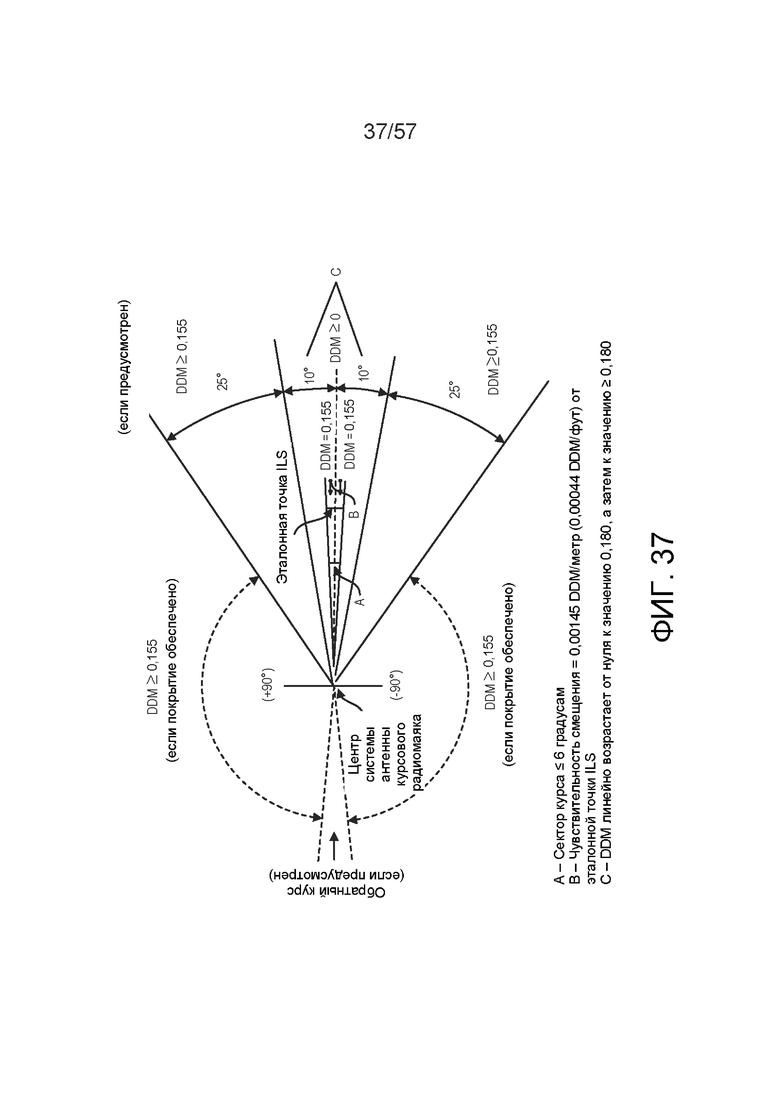
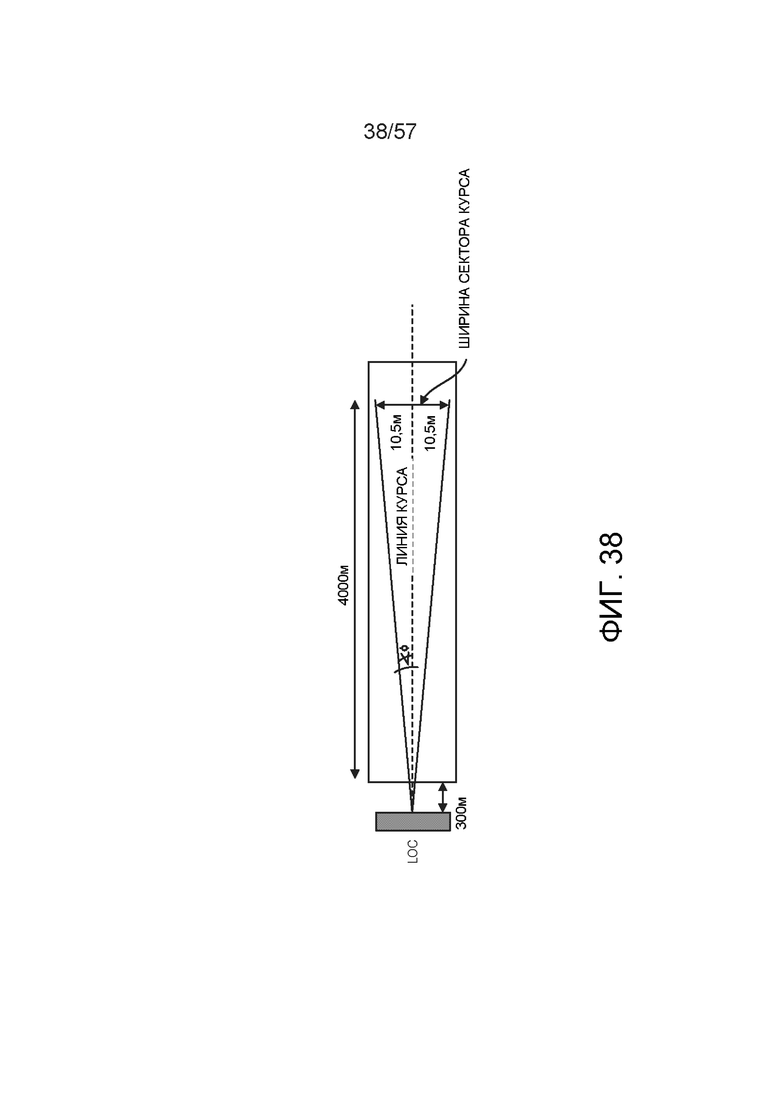
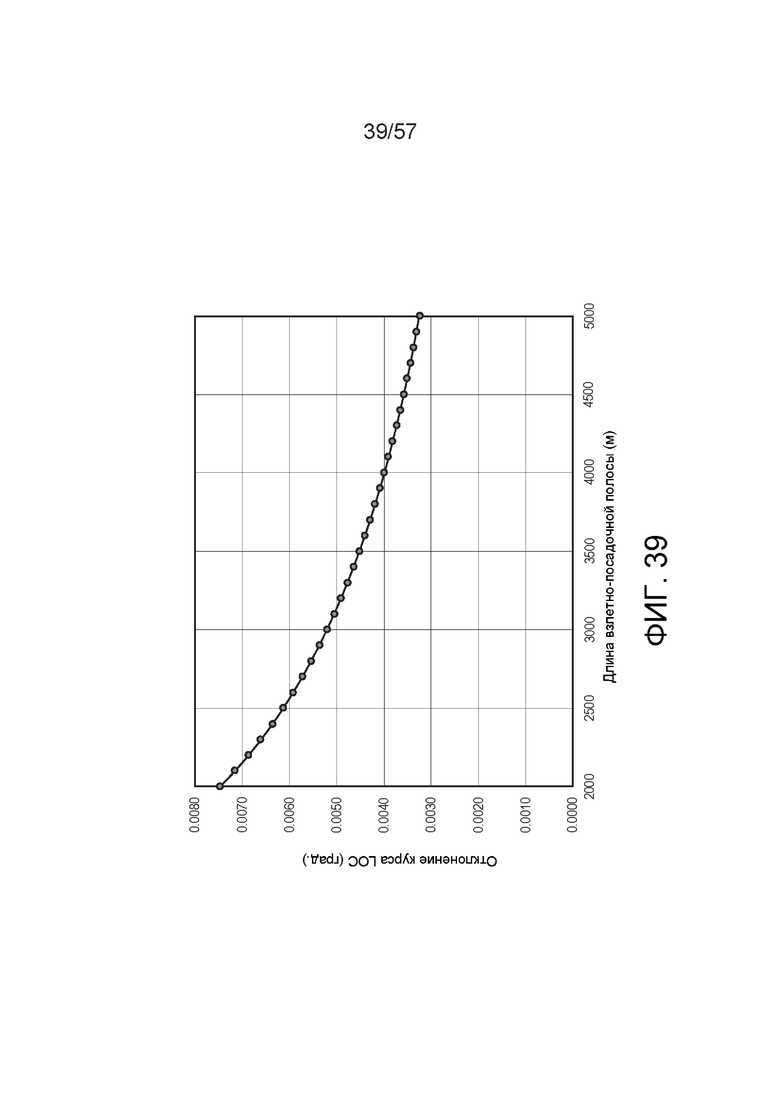
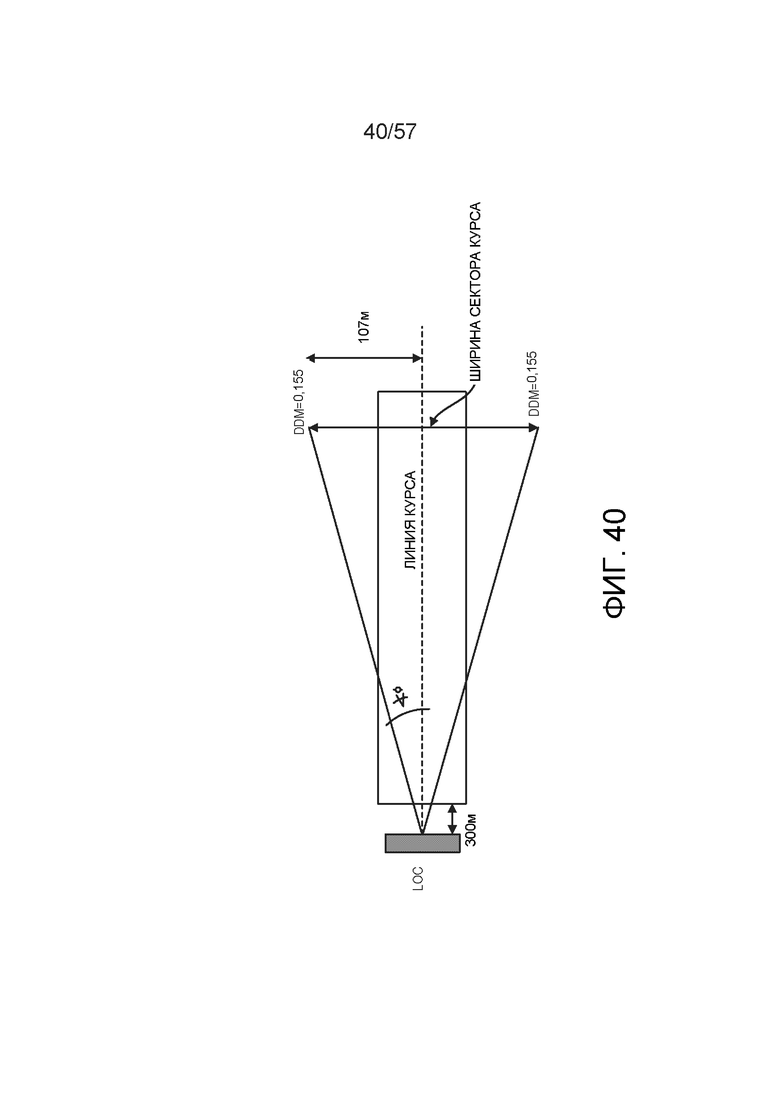
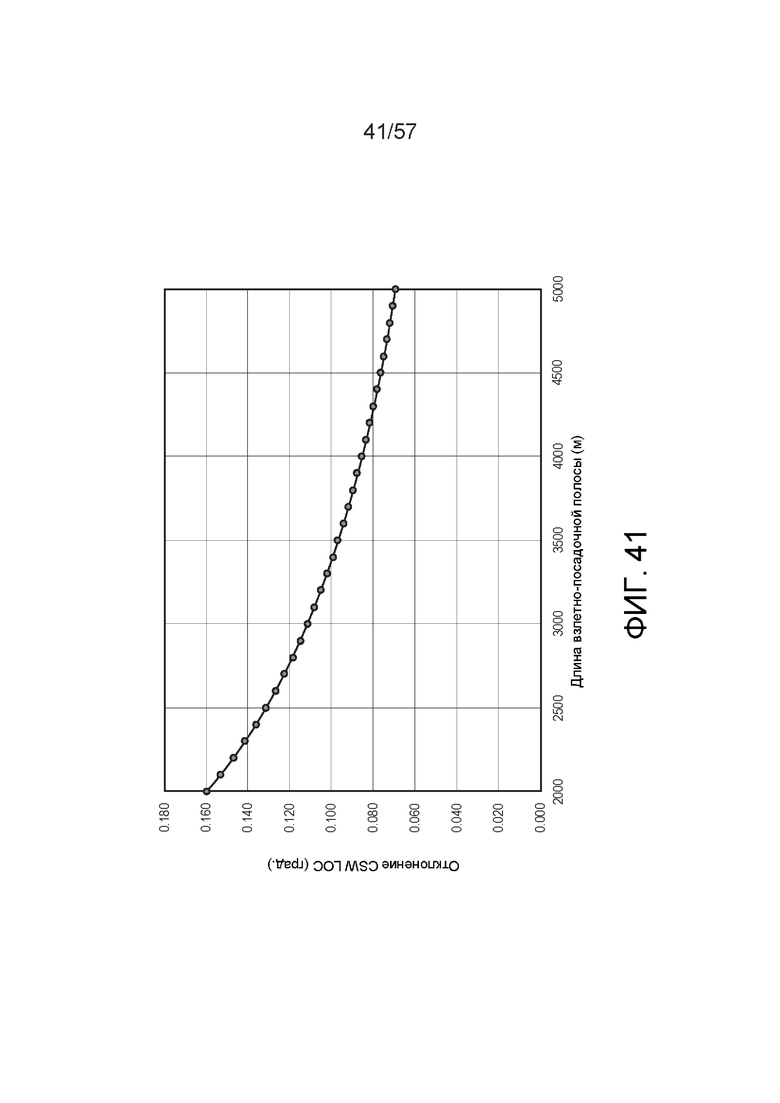
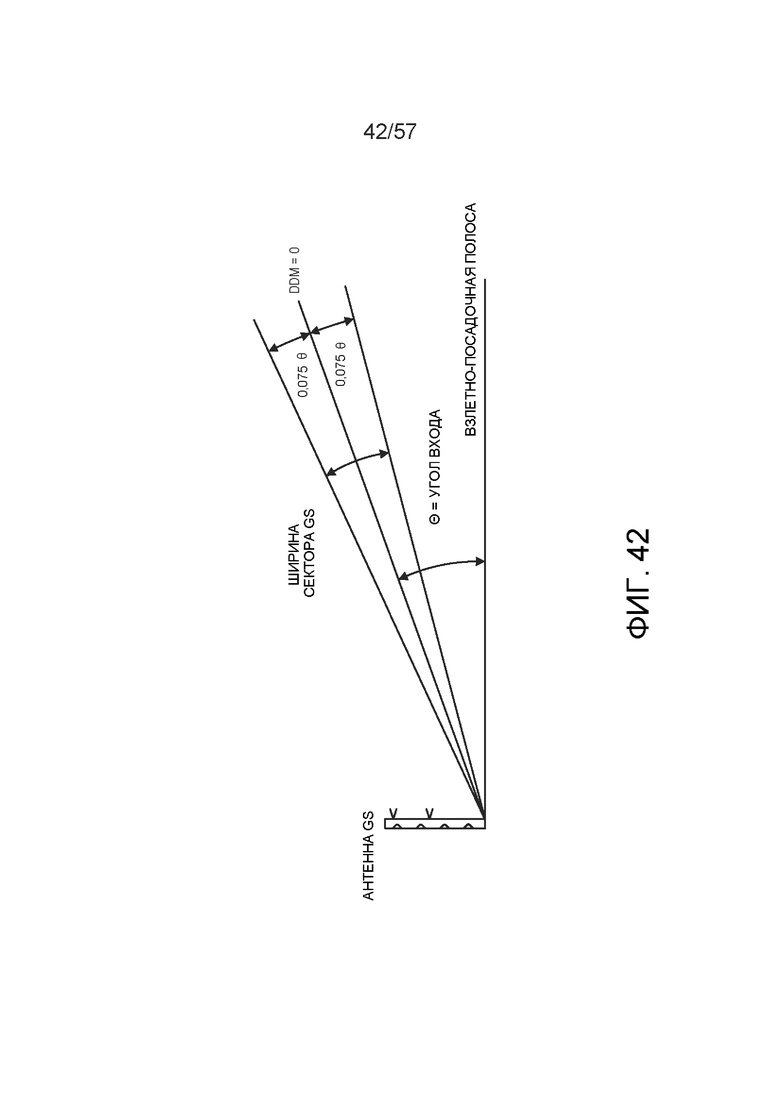
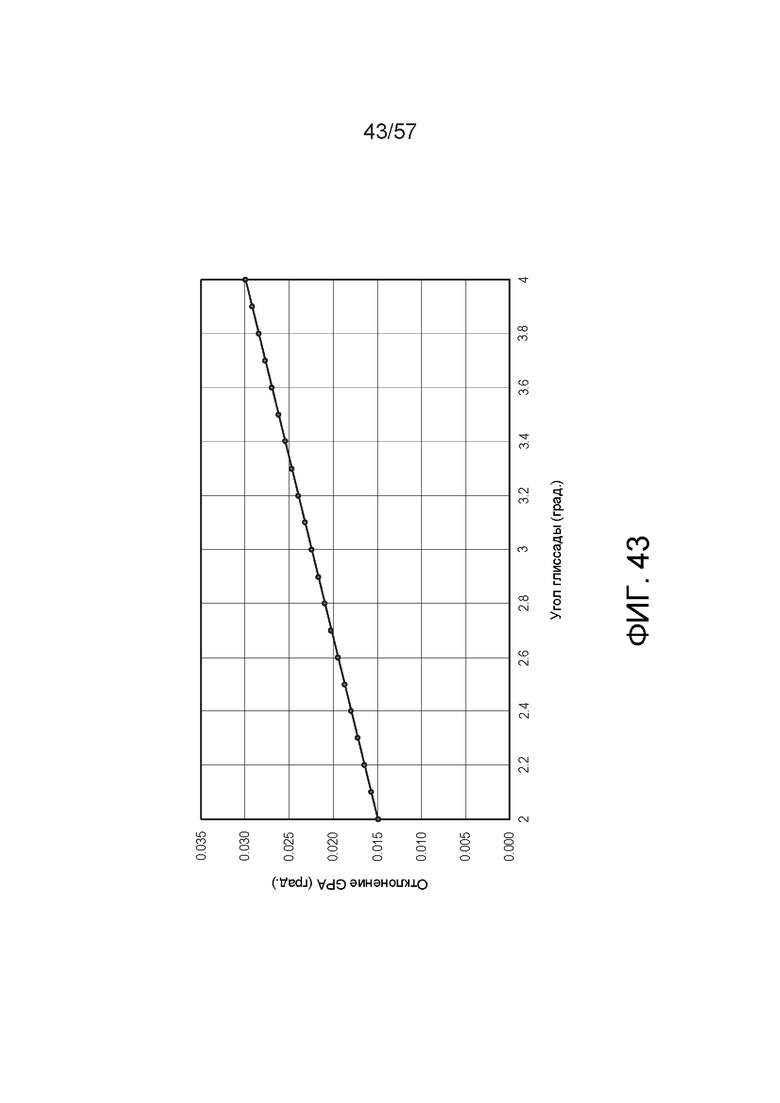
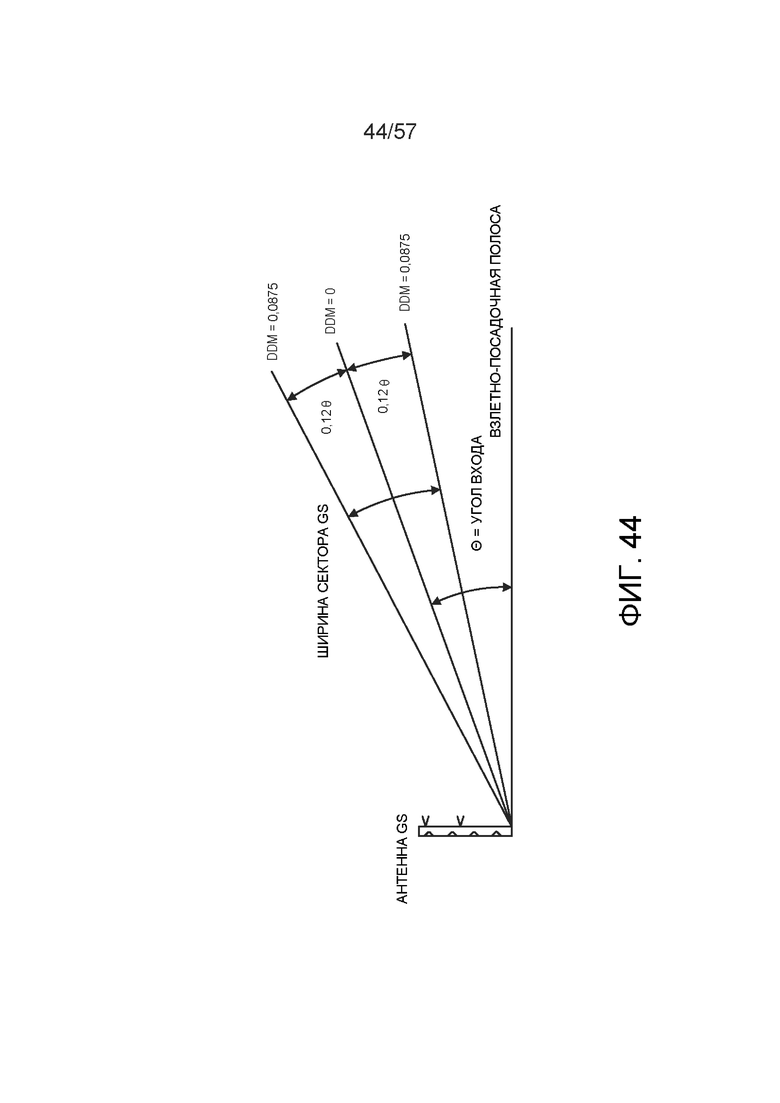
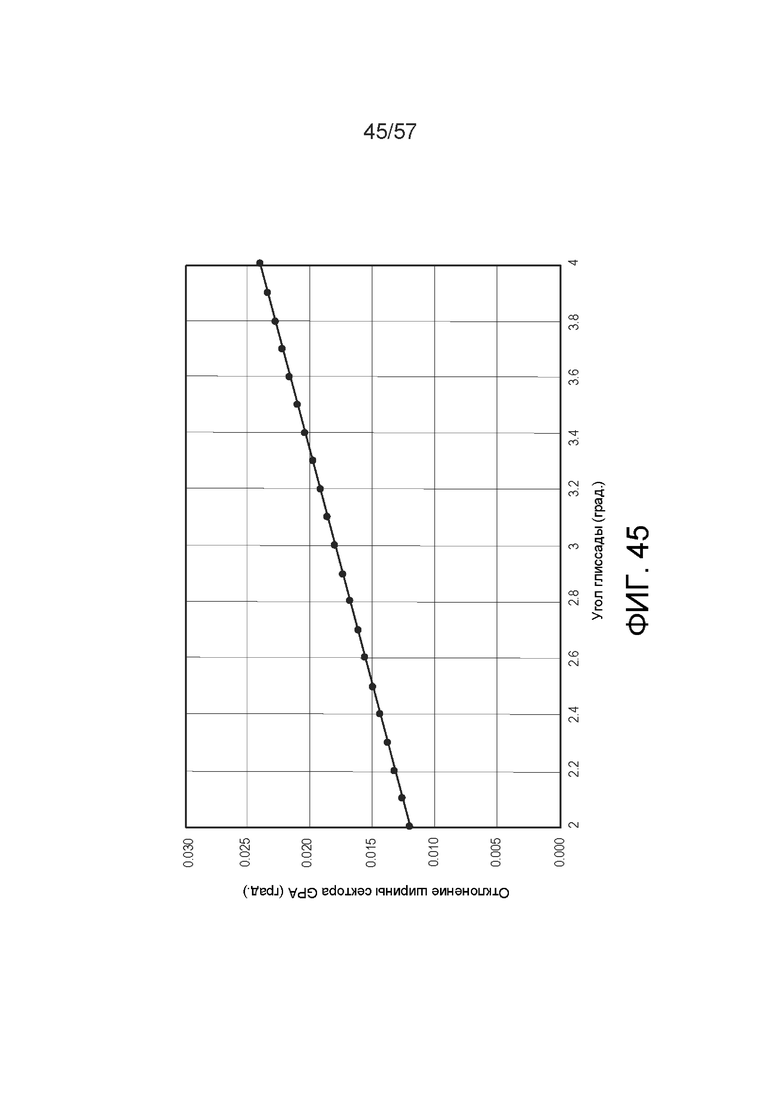
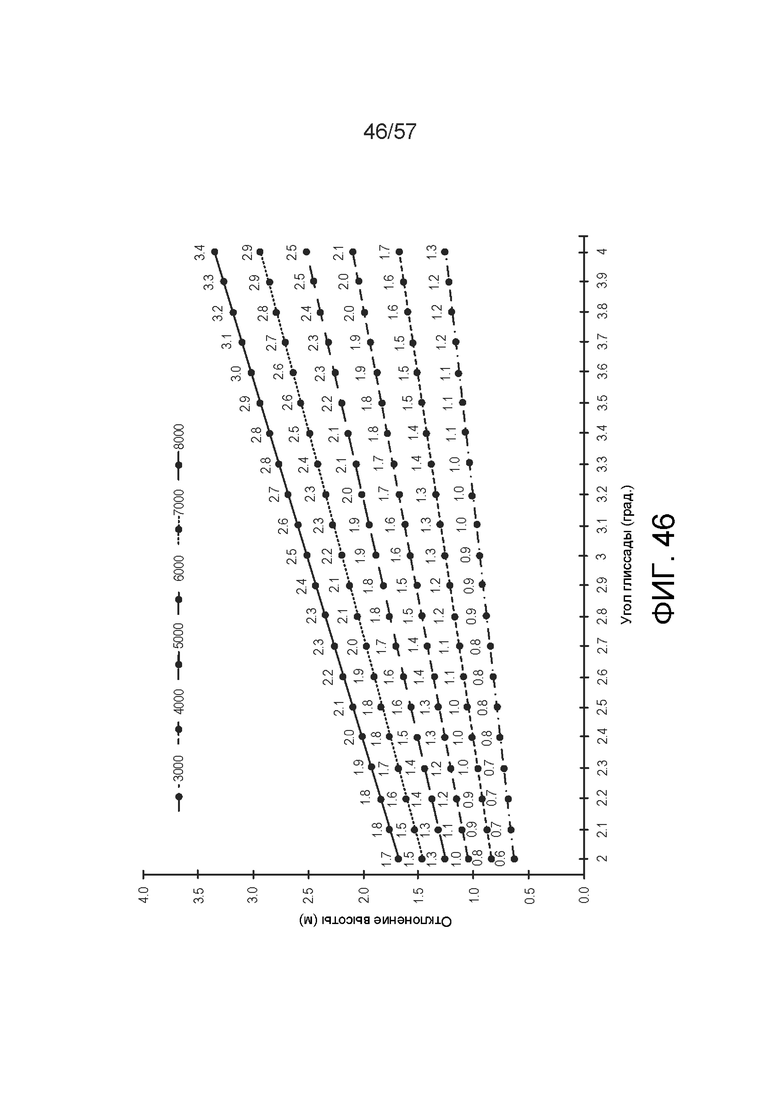
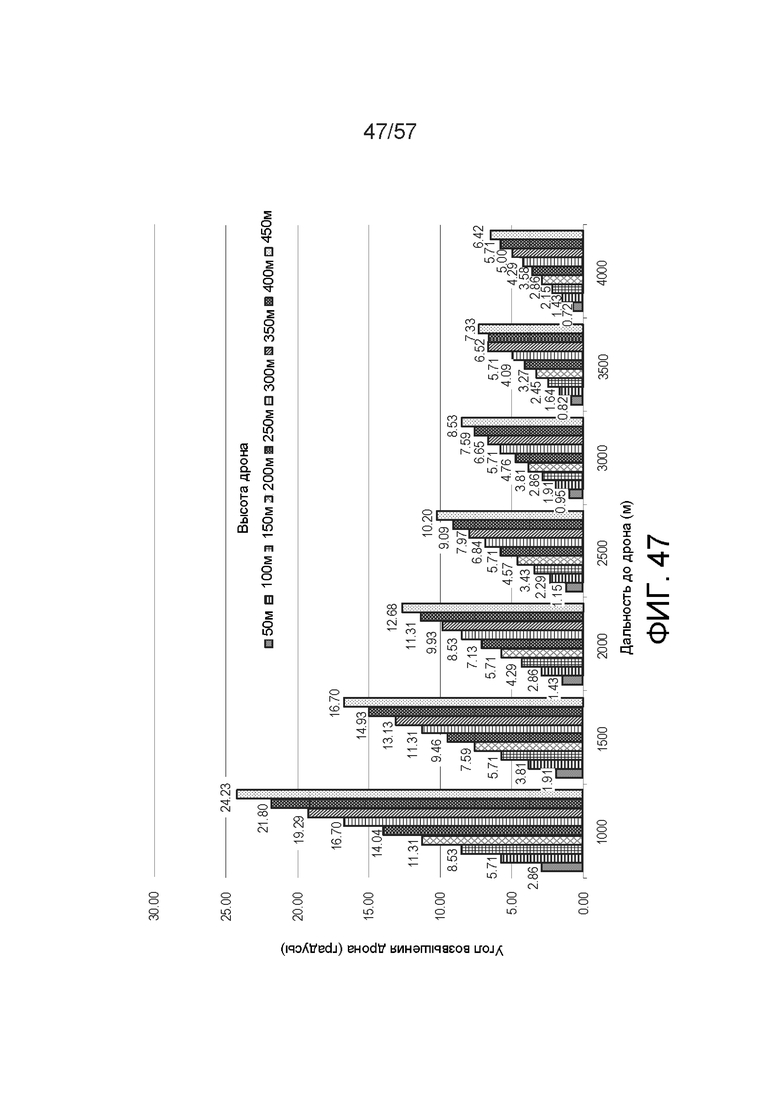
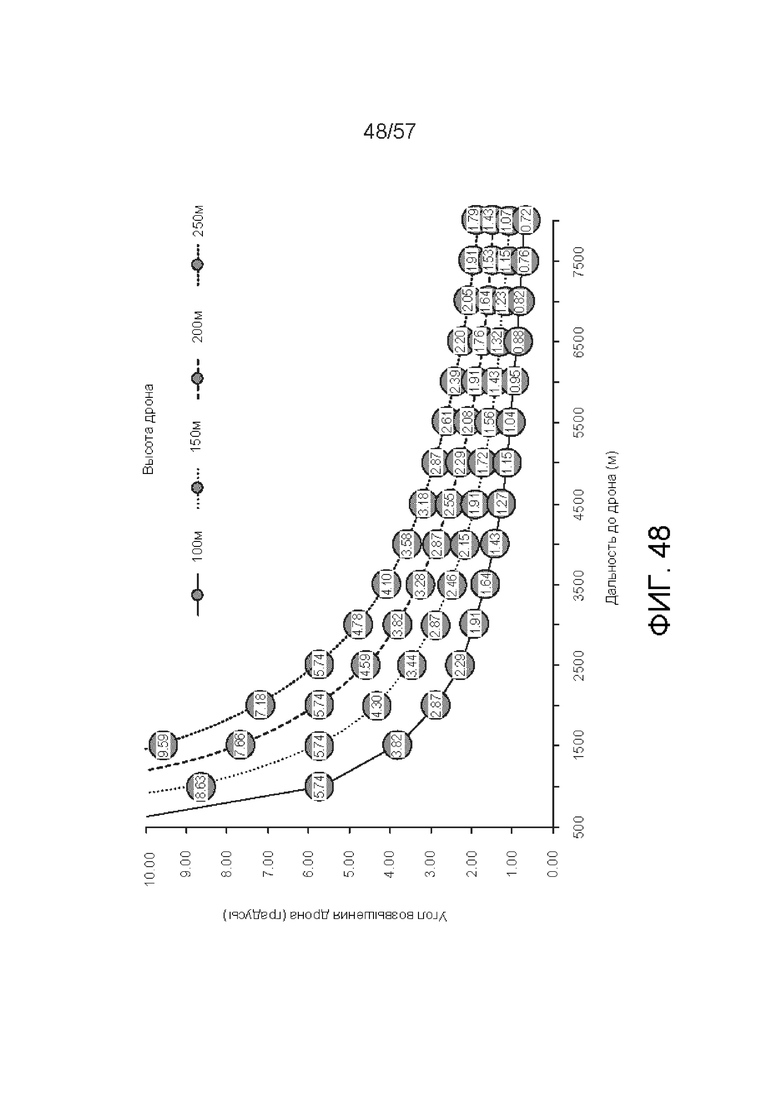
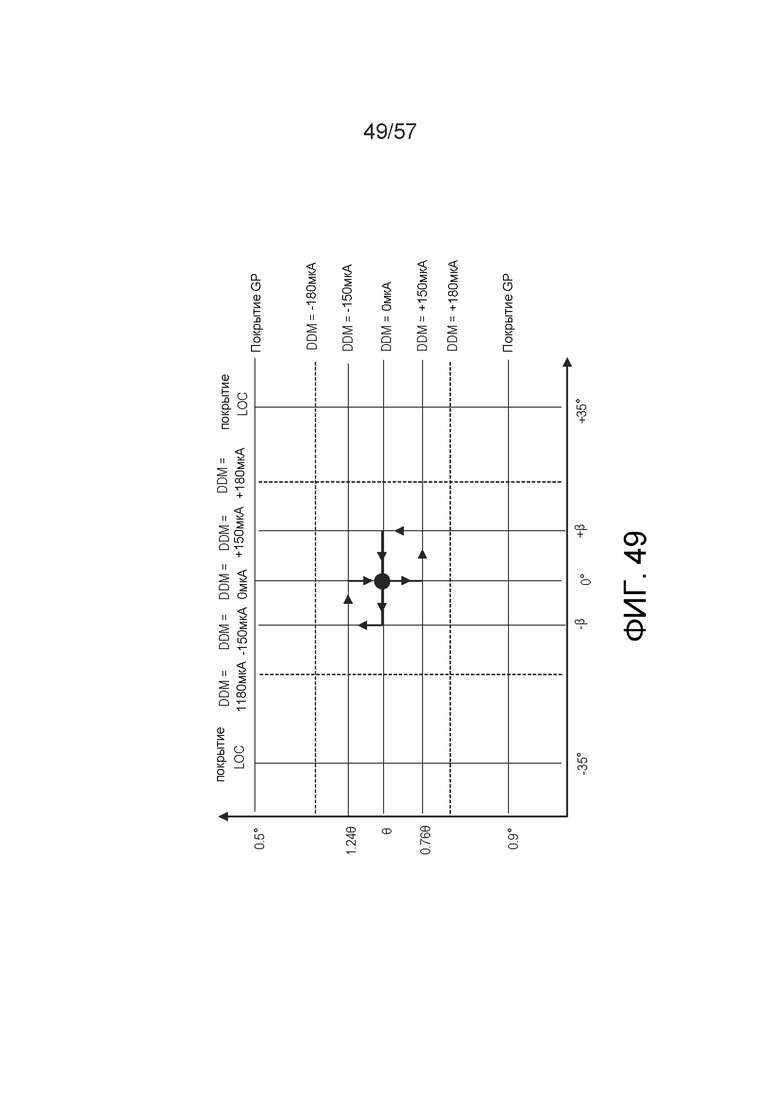
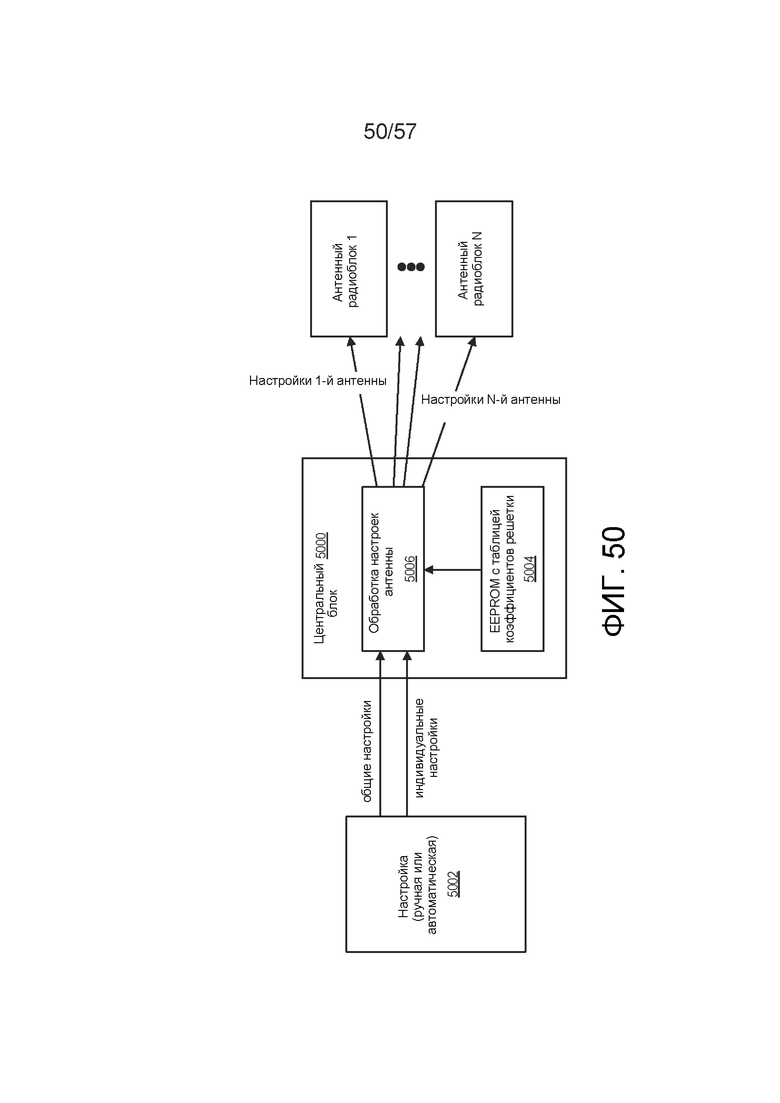
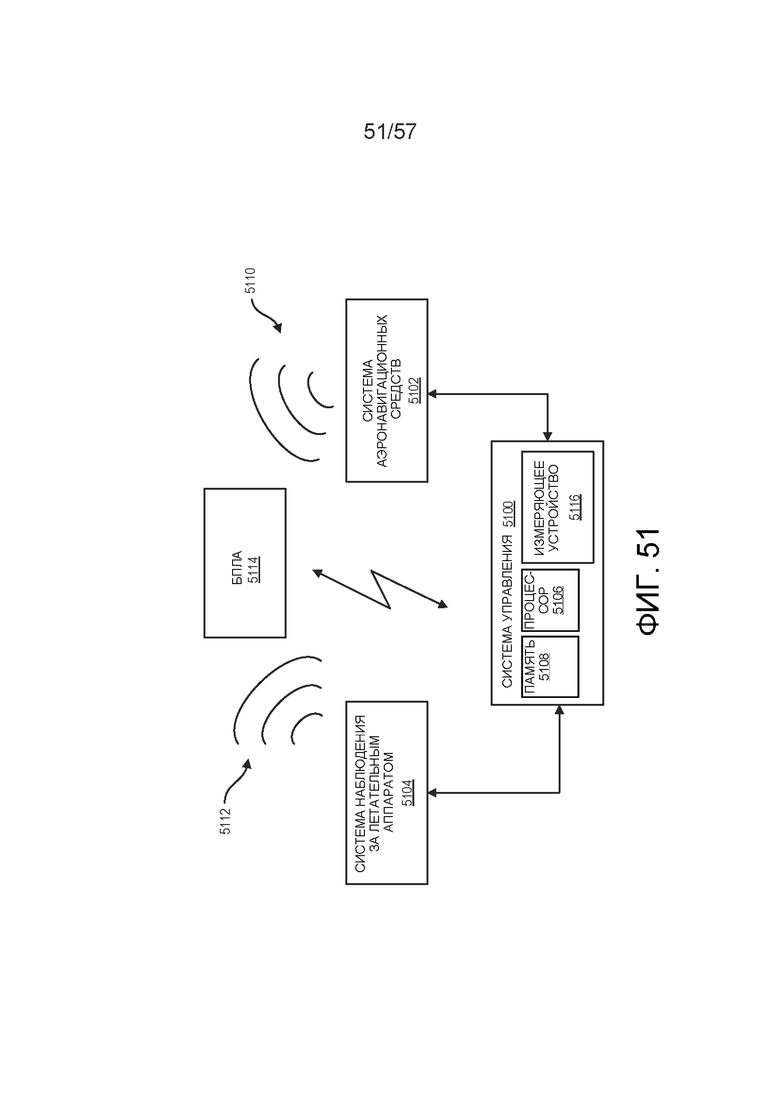
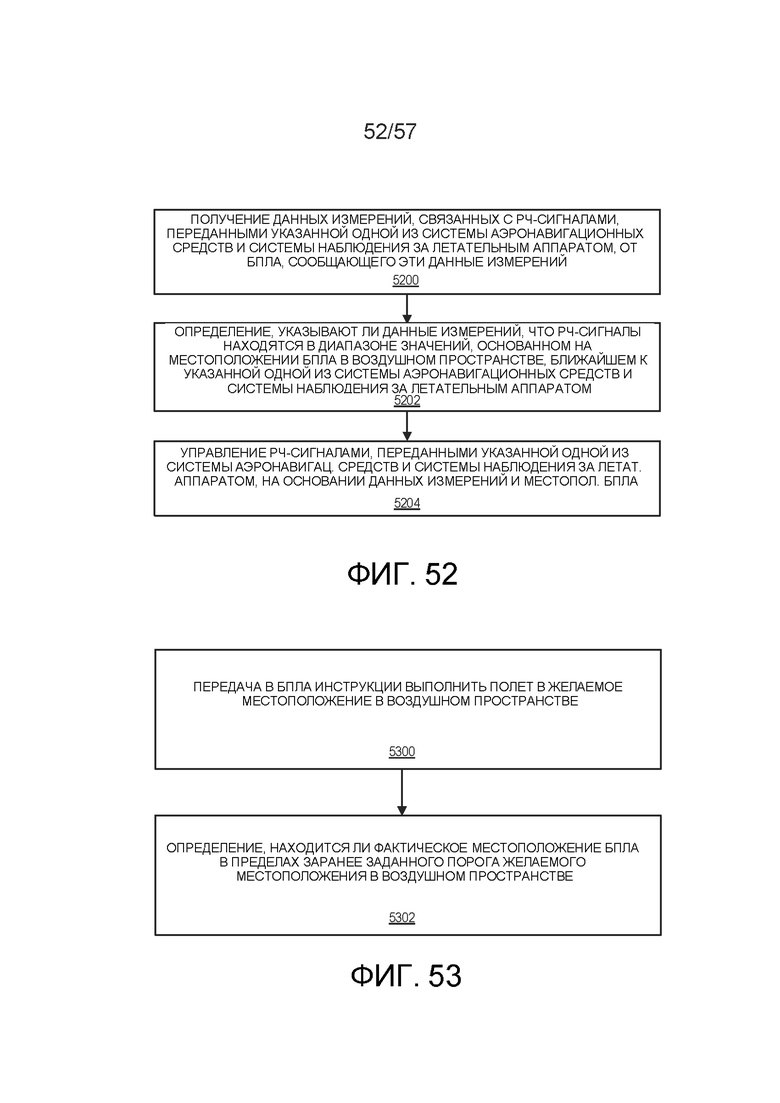
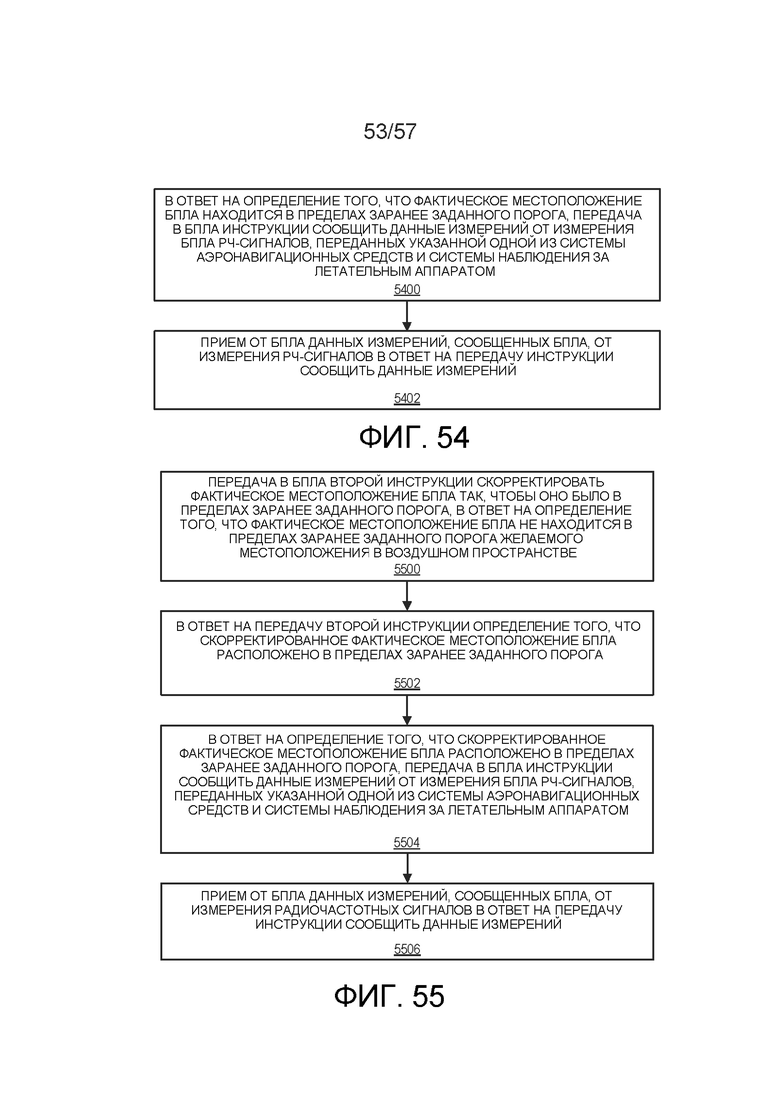
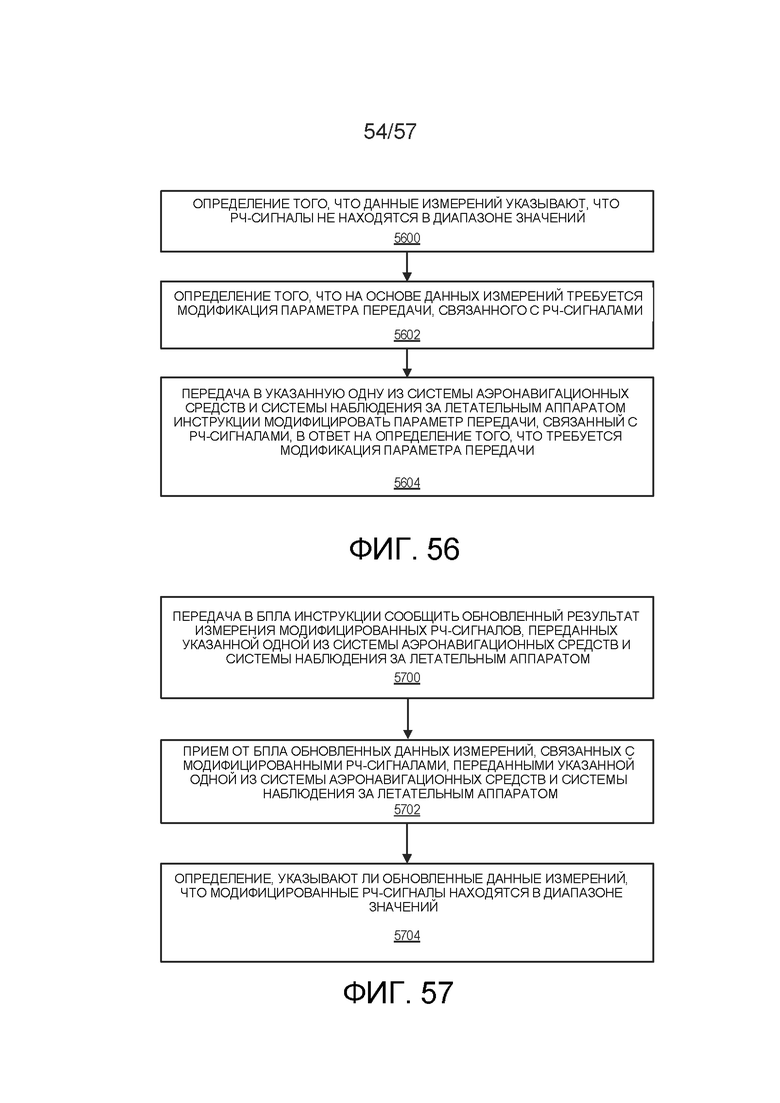
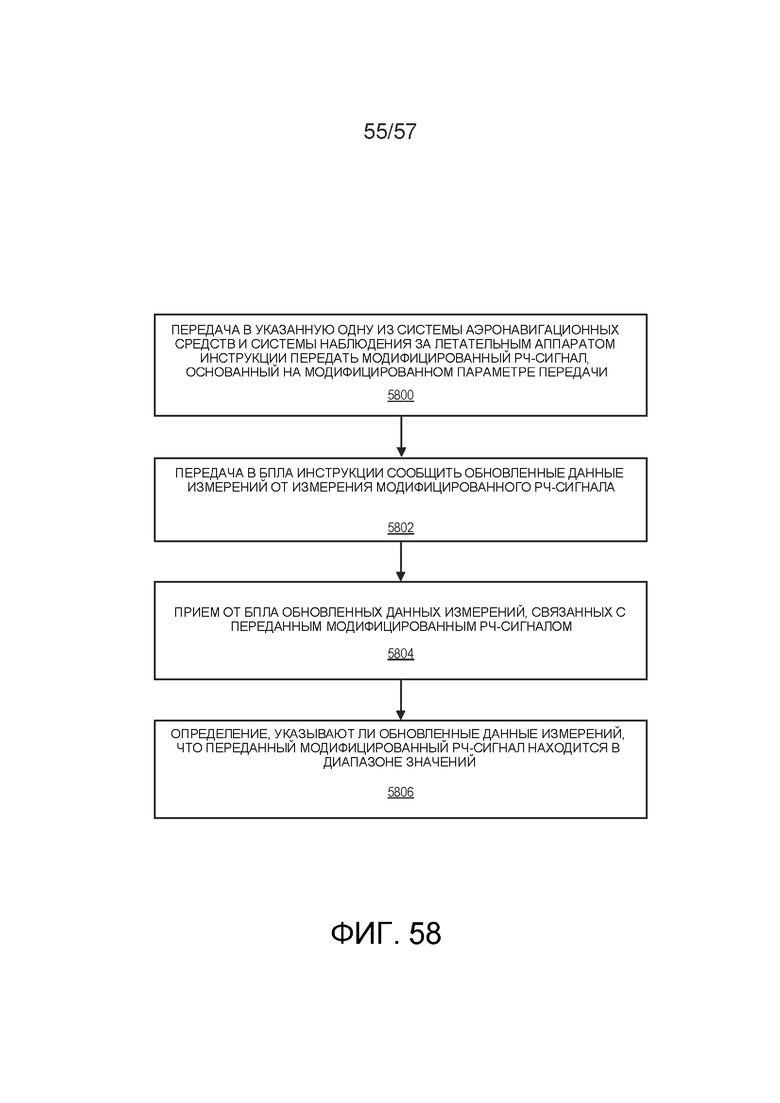
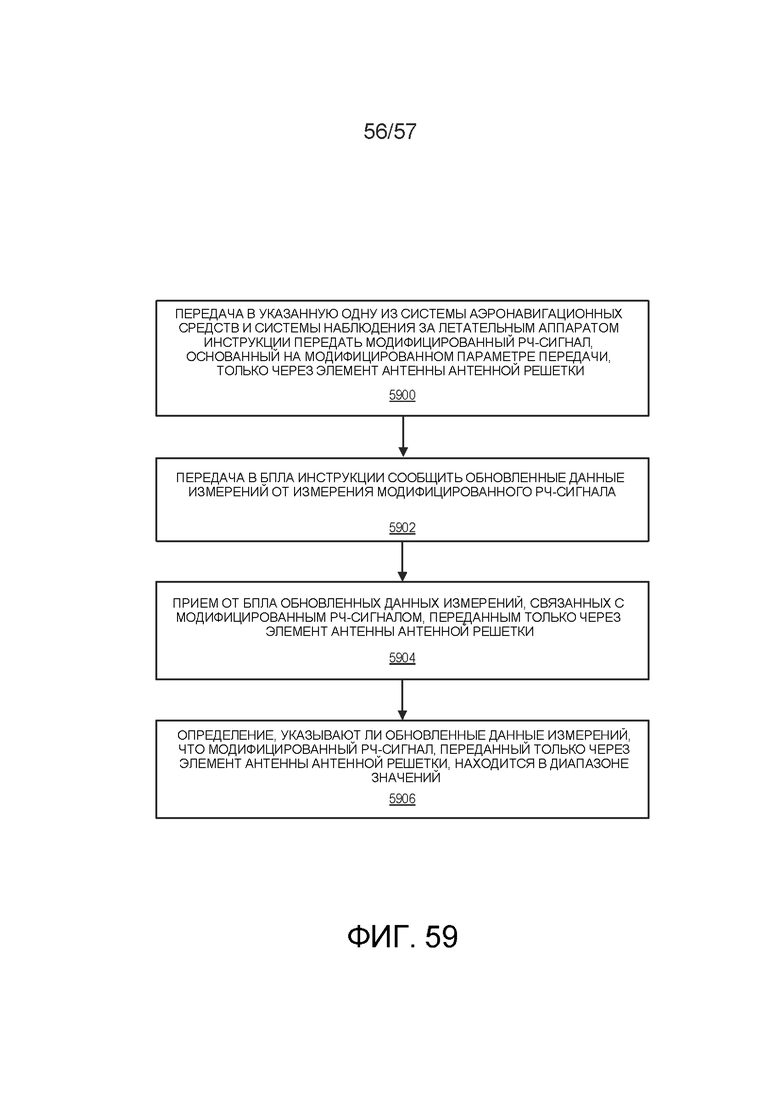
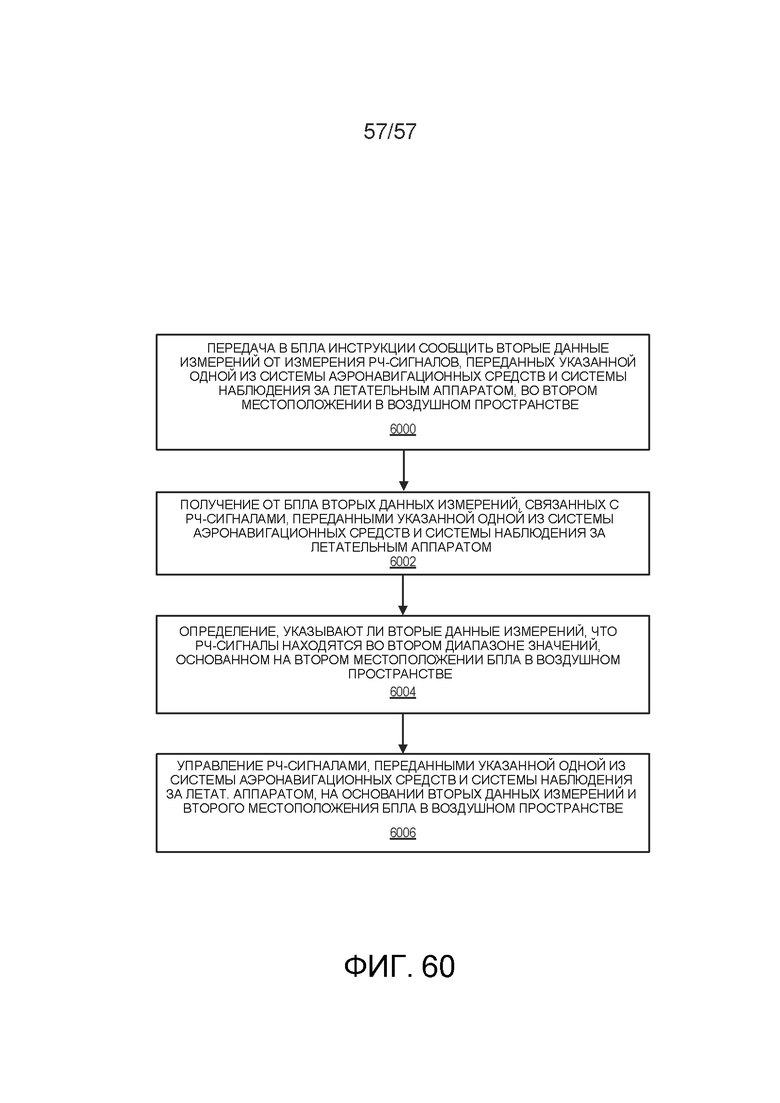
Группа изобретений относится к способу управления радиочастотными (РЧ) сигналами, системам управления (варианты), некратковременному компьютерочитаемому носителю. Для управления РЧ сигналами получают данные измерений от БПЛА, определяют, находятся ли они в необходимом диапазоне значений по отношению к ближайшей из систем наблюдения за БПЛА, производят управление РЧ сигналами. Каждая из вариантов систем управления содержит процессор и память, содержащую инструкции для выполнения способа. Обеспечивается возможность управления БПЛА в сложных условиях аэродромного рельефа. 4 н. и 36 з.п. ф-лы, 60 ил., 7 табл.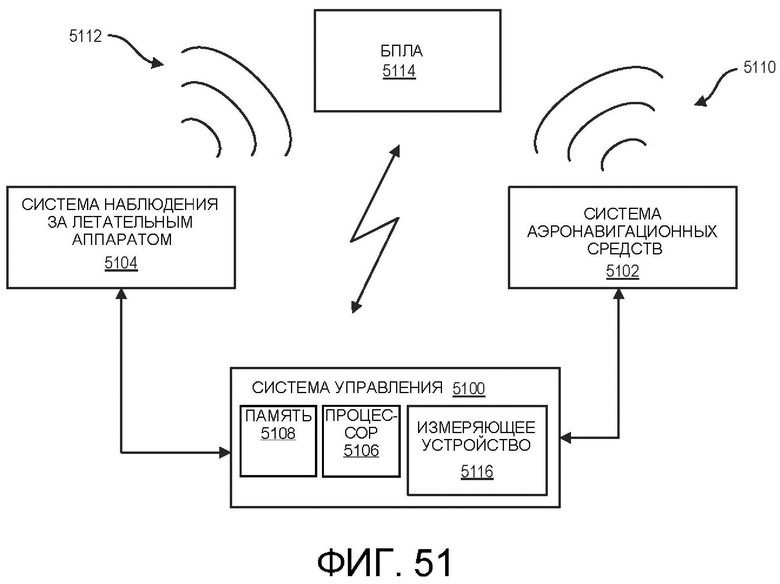
1. Способ управления радиочастотными сигналами, выполняемый системой управления, сообщающейся с одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, включающий:
получение (5200) данных измерений, связанных с радиочастотными сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, от беспилотного летательного аппарата (БПЛА), сообщающего эти данные измерений;
определение (5202), указывают ли данные измерений, что радиочастотные сигналы находятся в диапазоне значений, основанном на местоположении БПЛА в воздушном пространстве, ближайшем к указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом; и
управление (5204) радиочастотными сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основании данных измерений и местоположения БПЛА.
2. Способ по п. 1, в котором система аэронавигационных средств содержит по меньшей мере одно из следующего: систему курсового радиомаяка, глиссадную систему, систему VOR, систему TACAN и систему DME; и
при этом система наблюдения за летательным аппаратом содержит радиолокационную систему наблюдения.
3. Способ по п. 1, также включающий:
передачу (5300) в БПЛА инструкции выполнить полет в желаемое местоположение в воздушном пространстве и
определение (5302), находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве.
4. Способ по п. 3, также включающий:
в ответ на определение того, что фактическое местоположение БПЛА находится в пределах заранее заданного порога, передачу (5400) в БПЛА инструкции сообщить данные измерений от измерения БПЛА радиочастотных сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом; и
при этом получение данных измерений включает прием (5402) от БПЛА данных измерений, сообщенных БПЛА, от измерения радиочастотных сигналов в ответ на передачу инструкции сообщить данные измерений.
5. Способ по п. 3, также включающий:
передачу (5500) в БПЛА второй инструкции скорректировать фактическое положение БПЛА так, чтобы оно было в пределах заранее заданного порога, в ответ на определение того, что фактическое местоположение БПЛА не находится в пределах заранее заданного порога желаемого местоположения в воздушном пространстве;
в ответ на передачу второй инструкции, определение (5502) того, что скорректированное фактическое местоположение БПЛА находится в пределах заранее заданного порога; и
в ответ на определение того, что скорректированное фактическое местоположение БПЛА находится в пределах заранее заданного порога, передачу (5504) в БПЛА инструкции сообщить данные измерений от измерения БПЛА радиочастотных сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом; и
при этом получение данных измерений включает прием (5506) от БПЛА данных измерений, сообщенных БПЛА, от измерения радиочастотных сигналов в ответ на передачу инструкции сообщить данные измерений.
6. Способ по п. 3, в котором определение, находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве, включает:
получение информации о местоположении, идентифицирующей фактическое местоположение БПЛА в воздушном пространстве, по меньшей мере от одного из измеряющего устройства системы управления и БПЛА и
определение, находится ли фактическое местоположение БПЛА в пределах заранее заданного порога желаемого местоположения в воздушном пространстве на основании информации о местоположении.
7. Способ по п. 6, в котором воздушное пространство, ближайшее к указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, представляет собой воздушное пространство, в котором отсутствуют сигналы глобальной навигационной спутниковой системы; и
при этом получение информации о местоположении включает получение информации о местоположении, идентифицирующей фактическое местоположение БПЛА в воздушном пространстве, в котором отсутствуют сигналы глобальной навигационной спутниковой системы, от измеряющего устройства системы управления.
8. Способ по п. 3, в котором инструкция выполнить полет в желаемое местоположение в воздушном пространстве также включает инструкцию для БПЛА зависнуть в желаемом местоположении в воздушном пространстве.
9. Способ по п. 4, в котором инструкция сообщить данные измерений от измерения БПЛА радиочастотных сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, включает инструкцию сообщить результат измерения радиочастотных сигналов во время зависания в желаемом местоположении в воздушном пространстве.
10. Способ по п. 1, в котором определение, указывают ли данные измерений, что радиочастотные сигналы находятся в диапазоне значений, основанном на местоположении БПЛА в воздушном пространстве, включает определение (5600) того, что данные измерений указывают, что радиочастотные сигналы не находятся в диапазоне значений; и
при этом управление радиочастотными сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, основанное на данных измерений и местоположении БПЛА, включает:
определение (5602) того, что на основе данных измерений требуется модификация параметра передачи, связанного с радиочастотными сигналами; и
передачу (5604) в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции модифицировать параметр передачи, связанный с радиочастотными сигналами, в ответ на определение того, что требуется модификация параметра передачи.
11. Способ по п. 10, также включающий:
передачу (5700) в БПЛА инструкции сообщить обновленный результат измерения модифицированных радиочастотных сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом;
прием (5702) от БПЛА обновленных данных измерений, связанных с модифицированными радиочастотными сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом; и
определение (5704), указывают ли обновленные данные измерений, что модифицированные радиочастотные сигналы находятся в диапазоне значений.
12. Способ по п. 11, также включающий:
в ответ на определение того, что обновленные данные измерений указывают, что модифицированные радиочастотные сигналы находятся в диапазоне значений, передачу в БПЛА инструкции выполнить полет во второе желаемое местоположение в воздушном пространстве для измерения радиочастотных сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом.
13. Способ по п. 11, также включающий:
в ответ на определение того, что обновленные данные измерений указывают, что модифицированные радиочастотные сигналы находятся в диапазоне значений, передачу в БПЛА инструкции на посадку.
14. Способ по п. 10, в котором определение того, что модификация параметра передачи, связанного с радиочастотными сигналами, включает определение того, что требуется модификация параметра передачи элемента антенны антенной решетки системы аэронавигационных средств или системы наблюдения за летательным аппаратом; и
при этом передача инструкции модифицировать параметр передачи включает передачу в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции модифицировать параметр передачи элемента антенны и идентификатор элемента антенны антенной решетки.
15. Способ по п. 14, также включающий:
передачу (5800) в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции передать модифицированный радиочастотный сигнал, основанный на модифицированном параметре передачи;
передачу (5802) в БПЛА инструкции сообщить обновленные данные измерений от измерения модифицированного радиочастотного сигнала;
прием (5804) от БПЛА обновленных данных измерений, связанных с переданным модифицированным радиочастотным сигналом; и
определение (5806), указывают ли обновленные данные измерений, что переданный модифицированный радиочастотный сигнал находится в диапазоне значений.
16. Способ по п. 14, также включающий:
передачу (5900) в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции передать модифицированный радиочастотный сигнал, основанный на модифицированном параметре передачи, только через элемент антенны антенной решетки;
передачу (5902) в БПЛА инструкции сообщить обновленные данные измерений от измерения модифицированного радиочастотного сигнала;
прием (5904) от БПЛА обновленных данных измерений, связанных с модифицированным радиочастотным сигналом, переданным только через элемент антенны антенной решетки; и
определение (5906), указывают ли обновленные данные измерений, что модифицированный радиочастотный сигнал, переданный только через элемент антенны антенной решетки, находится в диапазоне значений.
17. Способ по п. 16, в котором определение, указывают ли обновленные данные измерений, что модифицированный радиочастотный сигнал, переданный только через элемент антенны антенной решетки, находится во втором диапазоне значений, включает определение того, что дополнительные данные измерений находятся в диапазоне значений, при этом способ также включает:
в ответ на определение того, что дополнительные данные измерений находятся в диапазоне значений, передачу в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции повторно активировать все элементы антенны антенной решетки.
18. Способ по п. 16, в котором инструкция передать модифицированный радиочастотный сигнал также включает инструкцию прекратить передачу через все другие элементы антенны антенной решетки.
19. Способ по п. 1, также включающий:
передачу (6000) в БПЛА инструкции сообщить вторые данные измерений от измерения радиочастотных сигналов, переданных указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, во втором местоположении в воздушном пространстве;
получение (6002) от БПЛА вторых данных измерений, связанных с радиочастотными сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом;
определение (6004), указывают ли вторые данные измерений, что радиочастотные сигналы находятся во втором диапазоне значений, основанном на втором местоположении БПЛА в воздушном пространстве; и
управление (6006) радиочастотными сигналами, переданными указанной одной из системы аэронавигационных средств и системы наблюдения за летательным аппаратом, на основании вторых данных измерений и второго местоположения БПЛА в воздушном пространстве.
20. Система (5100) управления, сообщающаяся с одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом и содержащая:
процессор (5106) и память (5108), содержащую исполняемые инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) операций, включающих:
получение данных измерений, связанных с радиочастотными сигналами (5110, 5112), переданными указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, от беспилотного летательного аппарата (БПЛА) (5114), сообщающего эти данные измерений;
определение, указывают ли данные измерений, что радиочастотные сигналы (5110, 5112) находятся в диапазоне значений, основанном на местоположении БПЛА (5114) в воздушном пространстве, ближайшем к указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом; и
управление радиочастотными сигналами (5110, 5112), переданными указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, на основании данных измерений и местоположения БПЛА (5114).
21. Система (5100) управления по п. 20, в которой система (5102) аэронавигационных средств содержит по меньшей мере одно из следующего: систему курсового радиомаяка, глиссадную систему, систему VOR, систему TACAN и систему DME; и
при этом система (5104) наблюдения за летательным аппаратом содержит радиолокационную систему наблюдения.
22. Система (5100) управления по п. 20, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
передачу в БПЛА (5114) инструкции выполнить полет в желаемое местоположение в воздушном пространстве и
определение, находится ли фактическое местоположение БПЛА (5114) в пределах заранее заданного порога желаемого местоположения в воздушном пространстве.
23. Система (5100) управления по п. 22, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
в ответ на определение того, что фактическое местоположение БПЛА (5114) находится в пределах заранее заданного порога, передачу в БПЛА (5114) инструкции сообщить данные измерений от измерения БПЛА радиочастотных сигналов (5110, 5112), переданных указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом; и
прием от БПЛА (5114) данных измерений, сообщенных БПЛА (5114), от измерения радиочастотных сигналов (5110, 5112) в ответ на передачу инструкции сообщить данные измерений.
24. Система (5100) управления по п. 22, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
передачу в БПЛА (5114) второй инструкции скорректировать фактическое положение БПЛА (5114) так, чтобы оно было в пределах заранее заданного порога, в ответ на определение того, что фактическое местоположение БПЛА (5114) не находится в пределах заранее заданного порога желаемого местоположения в воздушном пространстве;
в ответ на передачу второй инструкции, определение того, что скорректированное фактическое местоположение БПЛА (5114) находится в пределах заранее заданного порога; и
в ответ на определение того, что скорректированное фактическое местоположение БПЛА (5114) находится в пределах заранее заданного порога, передачу в БПЛА (5114) инструкции сообщить данные измерений от измерения БПЛА радиочастотных сигналов (5110, 5112), переданных указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом; и
при этом получение данных измерений включает прием от БПЛА (5114) данных измерений, сообщенных БПЛА (5114), от измерения радиочастотных сигналов (5110, 5112) в ответ на передачу инструкции сообщить данные измерений.
25. Система (5100) управления по п. 22, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
получение информации о местоположении, идентифицирующей фактическое местоположение БПЛА (5114) в воздушном пространстве, по меньшей мере от одного из измеряющего устройства (5116) системы (5100) управления и БПЛА (5114) и
определение, находится ли фактическое местоположение БПЛА (5114) в пределах заранее заданного порога желаемого местоположения в воздушном пространстве на основании информации о местоположении.
26. Система (5100) управления по п. 25, в которой воздушное пространство, ближайшее к указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, представляет собой воздушное пространство, в котором отсутствуют сигналы глобальной навигационной спутниковой системы; и
при этом память также содержит инструкции, которые при их исполнении процессором вызывают выполнение процессором дополнительных операций, включающих получение информации о местоположении, идентифицирующей фактическое местоположение БПЛА (5114) в воздушном пространстве, в котором отсутствуют сигналы глобальной навигационной спутниковой системы, от измеряющего устройства (5116) системы (5100) управления.
27. Система (5100) управления по п. 22, в которой инструкция выполнить полет в желаемое местоположение в воздушном пространстве также включает инструкцию для БПЛА (5114) зависнуть в желаемом местоположении в воздушном пространстве.
28. Система (5100) управления по п. 23, в которой инструкция сообщить данные измерений от измерения БПЛА радиочастотных сигналов (5110, 5112), переданных указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, включает инструкцию сообщить об измерении радиочастотных сигналов (5110, 5112) во время зависания в желаемом местоположении в воздушном пространстве.
29. Система (5100) управления по п. 20, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
определение того, что данные измерений указывают, что радиочастотные сигналы (5110, 5112) не находятся в диапазоне значений;
определение того, что на основе данных измерений требуется модификация параметра передачи, связанного с радиочастотными сигналами (5110, 5112); и
передачу в указанную одну из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом инструкции модифицировать параметр передачи, связанный с радиочастотными сигналами (5110, 5112), в ответ на определение того, что требуется модификация параметра передачи.
30. Система (5100) управления по п. 29, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
передачу в БПЛА (5114) инструкции сообщить об обновленном измерении модифицированных радиочастотных сигналов (5110, 5112), переданных указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом;
прием от БПЛА (5114) обновленных данных измерений, связанных с модифицированными радиочастотными сигналами, переданными указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом; и
определение (5704), указывают ли обновленные данные измерений, что модифицированные радиочастотные сигналы (5110, 5112) находятся в диапазоне значений.
31. Система (5100) управления по п. 30, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
в ответ на определение того, что обновленные данные измерений указывают, что модифицированные радиочастотные сигналы (5110, 5112) находятся в диапазоне значений, передачу в БПЛА (5114) инструкции выполнить полет во второе желаемое местоположение в воздушном пространстве для измерения радиочастотных сигналов (5110, 5112), переданных указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом.
32. Система (5100) управления по п. 31, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
в ответ на определение того, что обновленные данные измерений указывают, что модифицированные радиочастотные сигналы (5110, 5112) находятся в диапазоне значений, передачу в БПЛА (5114) инструкции на посадку.
33. Система (5100) управления по п. 30, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
определение того, что требуется модификация параметра передачи элемента антенны антенной решетки системы (5102) аэронавигационных средств или системы (5104) наблюдения за летательным аппаратом; и
передачу в указанную одну из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом инструкции модифицировать параметр передачи элемента антенны и идентификатора элемента антенны антенной решетки.
34. Система (5100) управления по п. 33, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
передачу в указанную одну из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом инструкции передать модифицированные радиочастотные сигналы (5110, 5112), основанные на модифицированном параметре передачи;
передачу в БПЛА (5114) инструкции сообщить обновленные данные измерений от измерения модифицированных радиочастотных сигналов (5110, 5112);
прием от БПЛА (5114) обновленных данных измерений, связанных с переданными модифицированными радиочастотными сигналами (5110, 5112); и
определение, указывают ли обновленные данные измерений, что переданные модифицированные радиочастотные сигналы (5110, 5112) находятся в диапазоне значений.
35. Система (5100) управления по п. 34, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
передачу в указанную одну из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом инструкции передать модифицированный радиочастотный сигнал, основанный на модифицированном параметре передачи, только через элемент антенны антенной решетки;
передачу в БПЛА (5114) инструкции сообщить обновленные данные измерений от измерения модифицированного радиочастотного сигнала;
прием от БПЛА (5114) обновленных данных измерений, связанных с модифицированным радиочастотным сигналом, переданным только через элемент антенны антенной решетки; и
определение, указывают ли обновленные данные измерений, что модифицированный радиочастотный сигнал, переданный только через элемент антенны антенной решетки, находится в диапазоне значений.
36. Система (5100) управления по п. 35, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
определение того, что дополнительные данные измерений находятся в диапазоне значений; и
в ответ на определение того, что дополнительные данные измерений находятся в диапазоне значений, передачу в указанную одну из системы аэронавигационных средств и системы наблюдения за летательным аппаратом инструкции повторно активировать все элементы антенны антенной решетки.
37. Система (5100) управления по п. 34, в которой инструкция передать модифицированный радиочастотный сигнал также включает инструкцию прекратить передачу через все другие элементы антенны антенной решетки.
38. Система (5100) управления по п. 20, в которой память (5108) также содержит инструкции, которые при их исполнении процессором (5106) вызывают выполнение процессором (5106) дополнительных операций, включающих:
передачу в БПЛА (5114) инструкции сообщить вторые данные измерений от измерения радиочастотных сигналов (5110, 5112), переданных указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, во втором местоположении в воздушном пространстве;
получение от БПЛА (5114) вторых данных измерений, связанных с радиочастотными сигналами (5110, 5112), переданными указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом;
определение, указывают ли вторые данные измерений, что радиочастотные сигналы (5110, 5112) находятся во втором диапазоне значений, основанном на втором местоположении БПЛА (5114) в воздушном пространстве;
управление радиочастотными сигналами (5110, 5112), переданными указанной одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, на основании вторых данных измерений и второго местоположения БПЛА (5114) в воздушном пространстве.
39. Некратковременный компьютерочитаемый носитель (5108), содержащий исполняемые инструкции, которые при их исполнении процессором (5106) системы (5100) управления, сообщающейся с одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом, вызывают выполнение системой (5100) управления операций способа по любому из пп. 1-19.
40. Система (5100) управления, сообщающаяся с одной из системы (5102) аэронавигационных средств и системы (5104) наблюдения за летательным аппаратом и адаптированная для выполнения способа по любому из пп. 1-19.
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| БОРТОВАЯ СИСТЕМА СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА СИСТЕМЕ GNSS, ИМЕЮЩАЯ ИЗБЫТОЧНУЮ И НЕСХОДНУЮ АРХИТЕКТУРУ ДЛЯ ПОВЫШЕННОГО УРОВНЯ ДОСТОВЕРНОСТИ | 2013 |
|
RU2621827C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2769017C2 |
| US 20160035225 A1, 04.02.2016 | |||
| US 20180362158 A1, 20.12.2018. | |||
