Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к системе управления, которая управляет крутящим моментом приведения в движение гибридного транспортного средства, включающего в себя двигатель и моторы, а также относится к способу управления и к гибридному транспортному средству.
2. Описание предшествующего уровня техники
[0002] Один пример гибридного транспортного средства, включающего в себя двигатель и моторы-генераторы в качестве источников движущей силы, описывается в публикации заявки на патент Японии номер 2010-215038 (JP 2010-215038 А). В примере гибридного транспортного средства, описанного в JP 2010-215038 А, двигатель и первый мотор-генератор соединяются, например, с дифференциальным механизмом, который выполняет дифференциальную операцию с помощью трех вращательных элементов, и выходной элемент дифференциального механизма соединяется с входным элементом механизма распределения движущей силы на передние и задние колеса в форме, например, механизма планетарной зубчатой передачи. Механизм распределения движущей силы на передние и задние колеса имеет два вращательных элемента, которые предоставляют выходные элементы, помимо входного элемента, и выполнен с возможностью доставлять движущую силу из одного из выходных элементов на передние колеса и доставлять движущую силу из другого выходного элемента на задние колеса. Второй мотор-генератор соединяется с выходным элементом, который доставляет движущую силу на задние колеса. Затем, муфта предоставляется для соединения двух выходных элементов или отсоединения выходных элементов друг от друга.
[0003] Когда двигатель запускается из состояния, в котором транспортное средство движется при остановленном двигателе, двигатель проворачивается посредством первого мотора-генератора. В этом случае, крутящий момент за счет силы реакции прикладывается к выходному элементу дифференциального механизма. Таким образом, в системе, описанной в JP 2010-215038 А, муфта зацепляется с тем, чтобы соединять два вращательных элемента механизма распределения движущей силы на передние и задние колеса и интегрировать все компоненты механизма распределения движущей силы на передние и задние колеса. Когда муфта зацепляется, передние колеса и задние колеса не могут вращаться на скоростях дифференциала. Следовательно, в системе, описанной в JP 2010-215038 А, запрещается запуск двигателя во время поворота.
Сущность изобретения
[0004] Гибридное транспортное средство, которое включает в себя моторы или моторы-генераторы (которые совместно обозначаются как "моторы"), а также двигатель, имеет возможность двигаться только с помощью крутящего момента приведения в действие мотора(ов). Тем не менее, если требуемый крутящий момент приведения в движение увеличивается, или оставшаяся величина заряда устройства накопления мощности уменьшается, в состоянии, в котором транспортное средство движется с помощью мощности из мотора(ов), двигатель запускается, с тем чтобы увеличивать крутящий момент приведения в движение или увеличивать величину электрической мощности, сформированной посредством любого из моторов. В системе, описанной в JP 2010-215038 А, если гибридное транспортное средство поворачивает, когда должен быть запущен двигатель, запуск двигателя прекращается или запрещается; в силу этого, водитель может испытывать странное или некомфортное ощущение, поскольку, например, запрос на увеличение крутящего момента приведения в движение не может удовлетворяться, или устройство накопления мощности может быть чрезмерно разряжено.
[0005] Это изобретение предоставляет систему управления для гибридного транспортного средства, гибридное транспортное средство и способ управления для гибридного транспортного средства, которые позволяет предотвращать или ограничивать изменение характеристики руления или уменьшение устойчивости при движении, которая вызывается посредством запуска двигателя посредством использования мотора, который выступает в качестве источника движущей силы.
[0006] Первый аспект изобретения относится к системе управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя двигатель и первый мотор, второй мотор, дифференциальный механизм и электронный модуль управления. Двигатель и первый мотор выполнены с возможностью доставлять крутящий момент приведения в движение на первые ведущие колеса в качестве одной пары передних колес и задних колес. Второй мотор выполнен с возможностью доставлять крутящий момент приведения в движение на вторые ведущие колеса в качестве другой пары передних колес и задних колес. Дифференциальный механизм включает в себя первый вращательный элемент, выполненный с возможностью принимать крутящий момент двигателя, второй вращательный элемент, выполненный с возможностью принимать крутящий момент первого мотора, и третий вращательный элемент, выполненный с возможностью доставлять крутящий момент на первые ведущие колеса. Электронный модуль управления выполнен с возможностью выполнять прокручивание двигателя посредством первого мотора. Кроме того, электронный модуль управления выполнен с возможностью управлять выходным крутящим моментом второго мотора, когда выполняется прокручивание двигателя посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора.
[0007] В системе управления с конфигурацией, как описано выше, передние колеса и задние колеса представляют собой ведущие колеса, и первая приводная система, которая доставляет крутящий момент приведения в движение на первые ведущие колеса, выполнена с возможностью доставлять крутящий момент из дифференциального механизма, с которым соединяются двигатель и первый мотор, на первые ведущие колеса. Соответственно, когда двигатель прокручивается посредством первого мотора, крутящий момент за счет силы реакции, который уменьшает крутящий момент в направлении переднего хода, прикладывается к первым ведущим колесам. Кроме того, крутящий момент приведения в движение передается на вторые ведущие колеса через вторую приводную систему, имеющую второй мотор. Когда двигатель запускается в то время, когда транспортное средство поворачивает, при прекращении работы двигателя, крутящий момент приведения в движение первых ведущих колес изменяется вследствие силы реакции, вызываемой посредством запуска двигателя посредством первого мотора, и поперечная сила первых ведущих колес также изменяется с изменением крутящего момента приведения в движение. В этом случае, электронный модуль управления управляет выходным крутящим моментом второго мотора в таком направлении, чтобы ограничивать изменение характеристики руления вследствие изменения поперечной силы первых ведущих колес. Соответственно, характеристика руления не изменяется или существенно не изменяется, после запуска двигателя, по сравнению с характеристикой до запуска двигателя. Следовательно, характеристика руления во время поворота с задействованием запуска двигателя не отличается существенно от характеристики руления во время поворота без задействования запуска двигателя. Таким образом, двигатель может быть запущен даже в то время, когда транспортное средство поворачивает, и можно повышать устойчивость при движении во время поворота либо предотвращать или ограничивать уменьшение устойчивости при движении.
[0008] В системе управления, как описано выше, первые ведущие колеса могут представлять собой передние колеса, а вторые ведущие колеса могут представлять собой задние колеса. Электронный модуль управления может быть выполнен с возможностью увеличивать выходной крутящий момент второго мотора, когда выполняется прокручивание двигателя посредством первого мотора, и гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента второго мотора.
[0009] В системе управления с такой конфигурацией, если двигатель проворачивается посредством первого мотора в то время, когда транспортное средство поворачивает за счет руления передними колесами, крутящий момент за счет силы реакции прикладывается к передним колесам. Затем, когда крутящий момент за счет силы реакции превращается в тормозной крутящий момент передних колес, и поперечная сила передних колес уменьшается, крутящий момент приведения в движение задних колес увеличивается посредством второго мотора, так что поперечная сила задних колес уменьшается. Следовательно, изменение характеристики руления в сторону недостаточной поворачиваемости вследствие уменьшения поперечной силы передних колес может быть уменьшено или скорректировано посредством изменения характеристики руления в сторону избыточной поворачиваемости вследствие уменьшения поперечной силы задних колес.
[0010] В системе управления, как описано выше, первые ведущие колеса могут представлять собой задние колеса, а вторые ведущие колеса могут представлять собой передние колеса. Электронный модуль управления может быть выполнен с возможностью увеличивать выходной крутящий момент второго мотора, когда выполняется прокручивание двигателя посредством первого мотора, в одном из состояния, в котором гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора, и состояния, в котором гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
[0011] В системе управления с такой конфигурацией, когда крутящий момент приведения в движение и поперечная сила задних колес уменьшаются вследствие запуска двигателя посредством первого мотора, во время поворота транспортного средства за счет руления передними колесами, крутящий момент приведения в движение передних колес увеличивается посредством второго мотора, так что поперечная сила передних колес уменьшается. Следовательно, изменение характеристики руления в сторону избыточной поворачиваемости вследствие уменьшения поперечной силы задних колес может быть уменьшено или скорректировано посредством изменения характеристики руления в сторону недостаточной поворачиваемости вследствие уменьшения поперечной силы передних колес.
[0012] В системе управления, как описано выше, первые ведущие колеса могут представлять собой передние колеса, а вторые ведущие колеса могут представлять собой задние колеса. Электронный модуль управления может быть выполнен с возможностью определять то, равен или выше либо нет коэффициент разделения крутящего момента приведения в движение передних колес предварительно определенного опорного значения. Затем электронный модуль управления может уменьшать выходной крутящий момент второго мотора, когда коэффициент разделения крутящего момента приведения в движение передних колес равен или выше опорного значения, и выполняется прокручивание двигателя посредством первого мотора. Коэффициент разделения крутящего момента приведения в движение передних колес является отношением крутящего момента приведения в движение передних колес к полному крутящему моменту гибридного транспортного средства в случае, если гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
[0013] В системе управления с такой конфигурацией, в состоянии, в котором работа двигателя прекращена, транспортное средство может двигаться за счет приведения в действие передних колес и задних колес посредством первого мотора и второго мотора. Если двигатель проворачивается посредством первого мотора, когда транспортное средство поворачивает за счет такого приведения в действие передних колес и задних колес и руления передними колесами, крутящий момент приведения в движение передних колес уменьшается. В этом случае, если коэффициент разделения крутящего момента приведения в движение на передние колеса равен или выше предварительно определенного значения, поперечная сила увеличивается вследствие уменьшения крутящего момента приведения в движение, и характеристика руления изменяется к стороне избыточной поворачиваемости. В этом случае, электронный модуль управления уменьшает выходной крутящий момент второго мотора, с тем чтобы увеличивать поперечную силу задних колес. Как результат, характеристика руления изменяется к стороне недостаточной поворачиваемости. Таким образом, поскольку изменение характеристики руления на передних колесах является противоположным изменению характеристики руления на задних колесах, не допускается изменение либо становится менее вероятным или маловероятным изменение характеристики руления.
[0014] В системе управления, как описано выше, первые ведущие колеса могут представлять собой передние колеса, а вторые ведущие колеса могут представлять собой задние колеса. Электронный модуль управления может быть выполнен с возможностью определять то, меньше или нет коэффициент разделения крутящего момента приведения в движение передних колес предварительно определенного опорного значения. Затем электронный модуль управления может увеличивать выходной крутящий момент второго мотора, когда коэффициент разделения крутящего момента приведения в движение передних колес меньше опорного значения, и выполняется прокручивание двигателя посредством первого мотора. Коэффициент разделения крутящего момента приведения в движение передних колес является отношением крутящего момента приведения в движение передних колес к полному крутящему моменту гибридного транспортного средства, когда гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
[0015] В системе управления с такой конфигурацией, в состоянии, в котором работа двигателя прекращена, транспортное средство может двигаться за счет приведения в действие передних колес и задних колес посредством первого мотора и второго мотора. Если двигатель проворачивается посредством первого мотора, когда транспортное средство поворачивает за счет такого приведения в действие передних колес и задних колес и руления передними колесами, крутящий момент приведения в движение передних колес уменьшается. В этом случае, если коэффициент разделения крутящего момента приведения в движение на передние колеса меньше предварительно определенного значения, поперечная сила уменьшается вследствие уменьшения крутящего момента приведения в движение, и характеристика руления изменяется к стороне недостаточной поворачиваемости. В этом случае, электронный модуль управления увеличивает выходной крутящий момент второго мотора, с тем чтобы уменьшать поперечную силу задних колес. Как результат, характеристика руления изменяется к стороне избыточной поворачиваемости. Таким образом, поскольку изменение характеристики руления на передних колесах является противоположным изменению характеристики руления на задних колесах, не допускается изменение либо становится менее вероятным или маловероятным изменение характеристики руления.
[0016] В системе управления, как описано выше, электронный модуль управления может быть выполнен с возможностью изменять выходной крутящий момент второго мотора с предварительно определенной скоростью изменения.
[0017] В системе управления с такой конфигурацией, когда электронный модуль управления изменяет выходной крутящий момент второго мотора, с тем чтобы ограничивать изменение характеристики руления, выходной крутящий момент второго мотора постепенно изменяется с предварительно определенной скоростью изменения; в силу этого, характеристика руления может быть дополнительно стабилизирована.
[0018] В системе управления, как описано выше, электронный модуль управления может быть выполнен с возможностью дополнительно управлять выходным крутящим моментом первого мотора и выходным крутящим моментом второго мотора таким образом, что полный крутящий момент в качестве суммы крутящего момента на первых ведущих колесах и крутящего момента на вторых ведущих колесах после того, как выходной крутящий момент второго мотора управляется в таком направлении, чтобы ограничивать изменение характеристики руления, прикладывается в таком направлении, чтобы ускорять гибридное транспортное средство.
[0019] В системе управления с такой конфигурацией, крутящий момент приведения в движение первых ведущих колес уменьшается, когда двигатель запускается, и крутящий момент приведения в движение вторых ведущих колес изменяется, с тем чтобы ограничивать изменение характеристики руления. Затем электронный модуль управления управляет выходным крутящим моментом первого мотора и выходным крутящим моментом второго мотора таким образом, что полный крутящий момент в качестве суммы крутящего момента на первых ведущих колесах и крутящего момента на вторых ведущих колесах прикладывается в таком направлении, чтобы ускорять гибридное транспортное средство. Таким образом, поскольку крутящий момент приведения в движение гибридного транспортного средства в целом, после того, как крутящий момент приведения в движение или выходного крутящего момента каждого мотора управляется, прикладывается в таком направлении, чтобы ускорять гибридное транспортное средство, толчок подавляется, даже если крутящий момент приведения в движение увеличивается, когда запуск двигателя завершается.
[0020] Второй аспект изобретения относится к гибридному транспортному средству. Гибридное транспортное средство включает в себя двигатель и первый мотор, второй мотор, дифференциальный механизм и электронный модуль управления. Двигатель и первый мотор выполнены с возможностью доставлять крутящий момент приведения в движение на первые ведущие колеса в качестве одной пары передних колес и задних колес. Второй мотор выполнен с возможностью доставлять крутящий момент приведения в движение на вторые ведущие колеса в качестве другой пары передних колес и задних колес. Дифференциальный механизм включает в себя первый вращательный элемент, выполненный с возможностью принимать крутящий момент двигателя, второй вращательный элемент, выполненный с возможностью принимать крутящий момент первого мотора, и третий вращательный элемент, выполненный с возможностью доставлять крутящий момент на первые ведущие колеса. Электронный модуль управления выполнен с возможностью выполнять прокручивание двигателя посредством первого мотора. Кроме того, электронный модуль управления выполнен с возможностью управлять выходным крутящим моментом второго мотора, когда выполняется прокручивание двигателя посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора.
[0021] В гибридном транспортном средстве с такой конфигурацией, как описано выше, передние колеса и задние колеса представляют собой ведущие колеса, и первая приводная система, которая доставляет крутящий момент приведения в движение на первые ведущие колеса, выполнена с возможностью доставлять крутящий момент из дифференциального механизма, с которым соединяются двигатель и первый мотор, на первые ведущие колеса. Соответственно, когда двигатель прокручивается посредством первого мотора, крутящий момент за счет силы реакции, который уменьшает крутящий момент в направлении переднего хода, прикладывается к первым ведущим колесам. Кроме того, крутящий момент приведения в движение передается на вторые ведущие колеса через вторую приводную систему, имеющую второй мотор. Когда двигатель запускается в то время, когда транспортное средство поворачивает, при прекращении работы двигателя, крутящий момент приведения в движение первых ведущих колес изменяется вследствие силы реакции, вызываемой посредством запуска двигателя посредством первого мотора, и поперечная сила первых ведущих колес также изменяется с изменением крутящего момента приведения в движение. В этом случае, электронный модуль управления управляет выходным крутящим моментом второго мотора в таком направлении, чтобы ограничивать изменение характеристики руления вследствие изменения поперечной силы первых ведущих колес. Соответственно, характеристика руления не изменяется или существенно не изменяется, после запуска двигателя, по сравнению с характеристикой до запуска двигателя. Следовательно, характеристика руления во время поворота с задействованием запуска двигателя не отличается существенно от характеристики руления во время поворота без задействования запуска двигателя. Таким образом, двигатель может быть запущен даже в то время, когда транспортное средство поворачивает, и можно повышать устойчивость при движении во время поворота либо предотвращать или ограничивать уменьшение устойчивости при движении.
[0022] Третий аспект изобретения относится к способу управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя двигатель и первый мотор, второй мотор, дифференциальный механизм и электронный модуль управления. Двигатель и первый мотор выполнены с возможностью доставлять крутящий момент приведения в движение на первые ведущие колеса в качестве одной пары передних колес и задних колес. Второй мотор выполнен с возможностью доставлять крутящий момент приведения в движение на вторые ведущие колеса в качестве другой пары передних колес и задних колес. Дифференциальный механизм включает в себя первый вращательный элемент, выполненный с возможностью принимать крутящий момент двигателя, второй вращательный элемент, выполненный с возможностью принимать крутящий момент первого мотора, и третий вращательный элемент, выполненный с возможностью доставлять крутящий момент на первые ведущие колеса. Электронный модуль управления выполнен с возможностью выполнять прокручивание двигателя посредством первого мотора. Способ управления включает в себя управление выходным крутящим моментом второго мотора, когда выполняется прокручивание двигателя посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора.
[0023] При вышеуказанной компоновке, передние колеса и задние колеса представляют собой ведущие колеса, и первая приводная система, которая доставляет крутящий момент приведения в движение на первые ведущие колеса, выполнена с возможностью доставлять крутящий момент из дифференциального механизма, с которым соединяются двигатель и первый мотор, на первые ведущие колеса. Соответственно, когда двигатель прокручивается посредством первого мотора, крутящий момент за счет силы реакции, который уменьшает крутящий момент в направлении переднего хода, прикладывается к первым ведущим колесам. Кроме того, крутящий момент приведения в движение передается на вторые ведущие колеса через вторую приводную систему, имеющую второй мотор. Когда двигатель запускается в то время, когда транспортное средство поворачивает, при прекращении работы двигателя, крутящий момент приведения в движение первых ведущих колес изменяется вследствие силы реакции, вызываемой посредством запуска двигателя посредством первого мотора, и поперечная сила первых ведущих колес также изменяется с изменением крутящего момента приведения в движение. В этом случае, электронный модуль управления управляет выходным крутящим моментом второго мотора в таком направлении, чтобы ограничивать изменение характеристики руления вследствие изменения поперечной силы первых ведущих колес. Соответственно, характеристика руления не изменяется или существенно не изменяется, после запуска двигателя, по сравнению с характеристикой до запуска двигателя. Следовательно, характеристика руления во время поворота с задействованием запуска двигателя не отличается существенно от характеристики руления во время поворота без задействования запуска двигателя. Таким образом, двигатель может быть запущен даже в то время, когда транспортное средство поворачивает, и можно повышать устойчивость при движении во время поворота либо предотвращать или ограничивать уменьшение устойчивости при движении.
Краткое описание чертежей
[0024] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является схематичным видом приводной системы и системы управления гибридного транспортного средства согласно одному варианту осуществления изобретения;
Фиг. 2 является схематичным видом, иллюстрирующим краткое представление дифференциального механизма в форме механизма планетарной передачи с одним сателлитом;
Фиг. 3 является таблицей, показывающей пример комбинаций между солнечной шестерней, водилом и коронной шестерней механизма планетарной передачи с одним сателлитом и входным элементом, элементом силы реакции и выходным элементом;
Фиг. 4 является блок-схемой, показывающей пример данных, принимаемых посредством ECU, и сигналов команд управления, сформированных из ECU;
Фиг. 5 является блок-схемой последовательности операций способа, применимой для пояснения первого примера управления, выполняемого в вышеописанном варианте осуществления изобретения;
Фиг. 6 является графиком, применимым для пояснения изменения выходного крутящего момента второго мотора;
Фиг. 7 является блок-схемой последовательности операций способа, применимой для пояснения второго примера управления, выполняемого в варианте осуществления изобретения;
Фиг. 8 является блок-схемой последовательности операций способа, применимой для пояснения третьего примера управления, выполняемого в варианте осуществления изобретения;
Фиг. 9 является блок-схемой последовательности операций способа, применимой для пояснения четвертого примера управления, выполняемого в варианте осуществления изобретения; и
Фиг. 10 является блок-схемой последовательности операций способа, применимой для пояснения пятого примера управления, выполняемого в варианте осуществления изобретения.
Подробное описание вариантов осуществления
[0025] Далее описывается один вариант осуществления этого изобретения со ссылкой на чертежи. Гибридное транспортное средство 1, к которому может применяться это изобретение, включает в себя первую приводную систему 4, которая приводит в действие одну пару из передних колес 2 и задних колес 3, и вторую приводную систему 5, которая приводит в действие другую пару из передних колес 2 и задних колес 3. В варианте осуществления, описанном ниже, передние колеса 2 рассматриваются в качестве первых ведущих колес, и первая приводная система 4 представляет собой приводную систему, которая доставляет крутящий момент приведения в движение на передние колеса 2, тогда как задние колеса 3 рассматриваются в качестве вторых ведущих колес, и вторая приводная система 5 представляет собой приводную систему, которая доставляет крутящий момент приведения в движение на задние колеса 3. Один пример гибридного транспортного средства 1 схематично иллюстрируется на фиг. 1. Как показано на фиг. 1, первая приводная система 4 имеет двигатель 6 (ENG), первый мотор 7 и дифференциальный механизм 8, с которым соединяются двигатель 6 и первый мотор 7, и выполнена с возможностью доставлять крутящий момент приведения в движение из дифференциального механизма 8 на передние колеса 2 через блок 12 дифференциала.
[0026] Двигатель 6 представляет собой двигатель, к примеру, бензиновый двигатель или дизельный двигатель, который формирует крутящий момент посредством горения топлива. Когда двигатель 6 запускается, его выходной вал (не показан), к примеру, коленчатый вал, должен проворачиваться. Первый мотор 7 может представлять собой стандартный мотор, к примеру, синхронный мотор, который снабжается электрической мощностью и формирует крутящий момент, либо может представлять собой мотор-генератор (MG), имеющий функцию выработки электрической мощности.
[0027] Дифференциальный механизм 8 имеет, по меньшей мере, три вращательных элемента, т.е. входной элемент, в который крутящий момент передается из двигателя 6, элемента силы реакции, в который крутящий момент передается из первого мотора 7, и выходной элемент, который доставляет крутящий момент на передние колеса 2 и выполняет дифференциальную операцию с этими вращательными элементами. Соответственно, дифференциальный механизм 8 может иметь форму, например, планетарной зубчатой передачи типа с одним сателлитом или типа с двумя сателлитами. Фиг. 2 показывает один пример дифференциального механизма 8 в форме механизма планетарной передачи с одним сателлитом, который имеет солнечную шестерню S, коронную шестерню R и водило C в качестве своих вращательных элементов. Коронная шестерня R располагается концентрически с солнечной шестерней S, и водило C удерживает сателлитные шестерни P, которые вводятся в зацепление с солнечной шестерней S и коронной шестерней R. В примере, показанном на фиг. 2, водило C, с которым соединяется двигатель 6, служит в качестве входного элемента, и солнечная шестерня S, с которой соединяется первый мотор 7, служит в качестве элемента силы реакции, в то время как коронная шестерня R служит в качестве выходного элемента, который доставляет крутящий момент на передние колеса 2.
[0028] При вышеуказанной компоновке, когда двигатель 6 доставляет крутящий момент, первый мотор 7 формирует крутящий момент за счет силы реакции, так что коронная шестерня R вращается в идентичном направлении с двигателем 6 и доставляет крутящий момент приведения в движение на передние колеса 2. Кроме того, когда первый мотор 7 доставляет крутящий момент в положительном направлении (в направлении крутящего момента, доставляемого посредством двигателя 6) в состоянии, в котором работа двигателя 6 прекращена, коронная шестерня R принимает крутящий момент за счет силы реакции. А именно, крутящий момент прикладывается к коронной шестерне R в отрицательном направлении (в направлении, противоположном направлению крутящего момента, доставляемого посредством двигателя 6), и водило C и двигатель 6, соединенный с водилом C, вращаются в положительном направлении. Соответственно, двигатель 6 может проворачиваться посредством первого мотора 7.
[0029] В этом варианте осуществления изобретения, в котором дифференциальный механизм 8 имеет форму планетарной зубчатой передачи, любой из вращательных элементов может предоставлять входной элемент или элемент силы реакции, или выходной элемент. Таблица по фиг. 3 показывает пример комбинаций между солнечной шестерней S, водилом C и коронной шестерней R и входным элементом, элементом силы реакции и выходным элементом. На фиг. 3, "входной" означает, что вращательный элемент служит в качестве входного элемента, который принимает крутящий момент из двигателя 6, и "сила реакции" означает, что вращательный элемент служит в качестве элемента силы реакции, к которому прикладывается крутящий момент первого мотора 7, в то время как "выходной" означает, что вращательный элемент служит в качестве выходного элемента, который доставляет крутящий момент на передние колеса 2.
[0030] Первая приводная система 4 согласно этому варианту осуществления изобретения также может включать в себя механизм 10 передачи мощности, как показано на фиг. 2. Механизм 10 передачи мощности принимает крутящий момент из выходного элемента, такого как коронная шестерня R, и увеличивает или уменьшает входной крутящий момент, чтобы доставлять результирующий крутящий момент на передние колеса 2. Механизм 10 передачи мощности может иметь форму редуктора, имеющего постоянное передаточное число, или трансмиссии, допускающей изменение передаточного числа. В этом варианте осуществления изобретения, муфта может предоставляться на стороне выходного вала двигателя 6, или тормозной механизм может предоставляться для прекращения вращения выходного вала двигателя 6 или входного элемента дифференциального механизма 8, хотя муфта или тормозной механизм не показаны подробно на чертежах.
[0031] Далее описывается вторая приводная система 5. В варианте осуществления, показанном на фиг. 1, вторая приводная система 5 имеет второй мотор 11. Второй мотор 11 может представлять собой мотор, аналогичный вышеописанному первому мотору 7; в силу этого мотор-генератор (MG) может использоваться в качестве второго мотора 11. Второй мотор 11 соединяется с блоком 12 дифференциала таким образом, что крутящий момент второго мотора 11 передается на правое и левое задние колеса 3 через блок 12 дифференциала.
[0032] В гибридном транспортном средстве 1, показанном на фиг. 1, передние колеса 2 представляют собой управляемые колеса, и устройство рулевого управления 13 предоставляется для изменения угла поворота при рулении передних колес 2. Устройство рулевого управления 13 может быть аналогичным по конструкции устройству рулевого управления, установленному на традиционном транспортном средстве.
[0033] Каждый из вышеописанных моторов 7, 11 электрически соединен с блоком 14 электропитания, который преимущественно состоит из устройства накопления мощности, такого как аккумулятор или конденсатор и инвертор. Дополнительно, электронный модуль 15 управления (который упоминается как "ECU") предоставляется для управления каждым из моторов 7, 11 через блок 14 электропитания и управления двигателем 6. ECU 15 имеет микрокомпьютер в качестве своего основного компонента. ECU 15 выполнен с возможностью осуществлять вычисления с использованием принимаемых данных и заранее сохраненных данных и выводить результаты вычислений в блок 14 электропитания и двигатель 6 в качестве сигналов команд управления. Предусмотрены различные датчики (не показаны) для получения данных, которые должны приниматься посредством ECU 15. Фиг. 4 показывает примеры данных, принимаемых посредством ECU 15, и сигналов команд управления, сформированных из ECU 15. Принимаемые данные включают в себя, например, крутящий момент первого мотора 7, крутящий момент второго мотора 11, угол поворота при рулении, скорость транспортного средства, скорость относительно вертикальной оси, поперечное ускорение, ход педали акселератора и состояние заряда (SOC) устройства накопления мощности. Сигналы команд управления, сформированные из ECU 15, включают в себя, например, сигнал команды управления для управления электрическим током и т.п., первого мотора 7, сигнала команды управления для управления током и т.п. второго мотора 11, сигнал управления подачей топлива для двигателя 6 и сигнал зажигания для управления зажиганием в двигателе 6. Дополнительно, данные, заранее сохраненные в ECU 15, включают в себя опорную скорость транспортного средства, используемую для определения скорости транспортного средства, опорное значение, используемое для определения коэффициента разделения крутящего момента приведения в движение каждого из моторов 7, 11 или передних и задних колес 2, 3, критериальные значения, ассоциированные с углом поворота при рулении, скоростью относительно вертикальной оси и т.д. и используемые для определения состояния поворота транспортного средства, и карту, используемую для определения гибридного режима (который упоминается как "HV-режим") и электрического режима движения (который упоминается как "EV-режим"). В HV-режиме, транспортное средство движется посредством работы двигателя 6 и одного из моторов 7, 11. В EV-режиме, транспортное средство движется с помощью выходного крутящего момента одного из моторов 7, 11.
[0034] В гибридном транспортном средстве 1 с конструкцией, как описано выше, когда двигатель 6 запускается посредством первого мотора 7, крутящий момент за счет силы реакции против крутящего момента, доставляемого посредством первого мотора 7, прикладывается к коронной шестерне R, и крутящий момент приведения в движение передних колес 2 изменяется вследствие крутящего момента за счет силы реакции. Если транспортное средство поворачивает, поперечная сила (сила, возникающая при повороте) передних колес 2 изменяется вследствие изменения крутящего момента приведения в движение передних колес 2. Таким образом, система управления согласно этому варианту осуществления изобретения выполнена с возможностью осуществлять управление, как описано ниже, с тем чтобы повышать устойчивость при движении или ограничивать уменьшение устойчивости при движении посредством ограничения изменения характеристики руления, вызываемой посредством запуска двигателя 6 во время поворота. Управление, как описано ниже, выполняется посредством вышеописанного ECU 15.
[0035] Ниже описывается первый пример управления. Фиг. 5 является блок-схемой последовательности операций способа, применимой для пояснения одного примера управления, выполняемого посредством системы управления согласно этому варианту осуществления изобретения. Управляющая процедура по фиг. 5 выполняется посредством ECU 15, когда транспортное средство движется, в то время как работа двигателя 6 прекращена, например, в то время как впрыск топлива в двигателе 6 прекращен. Более конкретно, управляющая процедура по фиг. 5 выполняется посредством ECU 15, когда транспортное средство движется, в то время как энергия рекуперируется в одном из моторов 7, 11 или когда устанавливается EV-режим, в котором транспортное средство движется с помощью крутящего момента приведения в движение, сформированным посредством второго мотора 11, или крутящего момента приведения в движение, сформированного посредством второго мотора 11 и первого мотора 7. Первоначально, определяется то, осуществляются или нет одновременно поворот транспортного средства и запуск двигателя 6. Например, определяется (на этапе S1) то, имеется или нет запрос на запуск двигателя, и определяется (на этапе S2) то, поворачивает или нет транспортное средство, которое движется. Порядок этих определений не ограничен конкретным образом, и любой из этапа S1 и этапа S2 может выполняться первым.
[0036] Запрос на запуск двигателя 6 формируется, когда удовлетворяется такое условие, что ход педали акселератора увеличивается в то время, когда гибридное транспортное средство 1 движется в EV-режиме, либо такое условие, что SOC уменьшается. На этапе S1 определяется то, сформирован или нет сигнал команды управления для запуска двигателя 6, когда вышеуказанное условие удовлетворяется. В примере, показанном на фиг. 5, если отрицательное решение ("Нет") принято на этапе S1, ECU 15 возвращается без выполнения конкретного управления. С другой стороны, если положительное решение ("Да") принято на этапе S1, ECU 15 переходит к этапу S2 и определяет то, находится или нет транспортное средство в середине поворота в ходе движения. Определение этапа S2 может выполняться посредством определения того, равно или выше что-либо из величины руления (угла поворота при рулении) устройства рулевого управления 13, угла поворота при рулении передних колес 2, поперечного ускорения, скорости относительно вертикальной оси и т.д. либо нет данного значения, которое является предварительно определенным критерием или основой определения.
[0037] Если отрицательное решение ("Нет") принято на этапе S2, поворот транспортного средства и запуск двигателя 6 не осуществляются одновременно, и следовательно, ECU 15 возвращается без выполнения конкретного управления. С другой стороны, если положительное решение ("Да") принято на этапе S2, выходной крутящий момент второго мотора 11 изменяется (этап S3). Управление для изменения выходного крутящего момента второго мотора 11 выполняется с тем, чтобы предотвращать или ограничивать изменение характеристики руления, когда первый мотор 7 проворачивает двигатель 6, с тем чтобы запускать двигатель 6. Характеристика руления изменяется вследствие уменьшения поперечной силы, вызываемой посредством увеличения абсолютного значения крутящего момента на колесе, или вследствие увеличения поперечной силы, вызываемой посредством уменьшения абсолютного значения крутящего момента на колесе.
[0038] В гибридном транспортном средстве 1 с конструкцией, как показано на фиг. 1 и фиг. 2, по мере того, как выходной крутящий момент первого мотора 7 увеличивается в положительном направлении, крутящий момент прикладывается в положительном направлении к двигателю 6, соединенному с водилом C, с тем чтобы проворачивать двигатель 6. В этом случае, крутящий момент за счет силы реакции, вызываемый посредством прокручивания двигателя 6, прикладывается к передним колесам 2, на которые крутящий момент передается из коронной шестерни R. Обычно, поперечная сила колес снижается по мере того, как абсолютное значение крутящего момента приведения в движение или тормозного крутящего момента (крутящий момент приведения в движение и тормозной крутящий момент могут совместно и просто называться "крутящим моментом на колесе") увеличивается, и с другой стороны, поперечная сила увеличивается по мере того, как абсолютное значение крутящего момента на колесе снижается. Соответственно, если крутящий момент передних колес 2 представляет собой крутящий момент, который заставляет транспортное средство двигаться передним ходом, крутящий момент приведения в движение (абсолютное значение крутящего момента на колесе) передних колес 2 уменьшается вследствие приложения крутящего момента за счет силы реакции в колеса 2, и поперечная сила увеличивается с уменьшением абсолютного значения крутящего момента на колесе. Кроме того, если крутящий момент передних колес 2 равен 0, крутящий момент за счет силы реакции предоставляет крутящий момент приведения в движение направления отрицательного вращения (в котором транспортное средство движется задним ходом), и абсолютное значение крутящего момента на колесе увеличивается; в силу этого, поперечная сила передних колес 2 уменьшается. Таким образом, если двигатель 6 проворачивается посредством первого мотора 7 во время поворота транспортного средства, характеристика руления гибридного транспортного средства 1 может изменяться к стороне избыточной поворачиваемости (O/S) или изменяться к стороне недостаточной поворачиваемости (U/S), в зависимости от состояния крутящего момента передних колес 2. А именно, характеристика руления гибридного транспортного средства 1 изменяется к стороне избыточной поворачиваемости (O/S) по мере того, как поперечная сила передних колес 2 увеличивается, или характеристика руления гибридного транспортного средства 1 изменяется к стороне недостаточной поворачиваемости (U/S) по мере того, как поперечная сила передних колес 2 снижается. В этом варианте осуществления изобретения, "изменение характеристики руления в сторону избыточной поворачиваемости" включает в себя уменьшенную вероятность недостаточной поворачиваемости и увеличенную вероятность избыточной поворачиваемости. Кроме того, "изменение характеристики руления в сторону недостаточной поворачиваемости" включает в себя уменьшенную вероятность избыточной поворачиваемости и увеличенную вероятность недостаточной поворачиваемости.
[0039] С другой стороны, на задних колесах 3, также, поперечная сила задних колес 3 снижается по мере того, как крутящий момент на колесе увеличивается, или поперечная сила задних колес 3 увеличивается по мере того, как крутящий момент на колесе снижается. Затем характеристика руления изменяется к стороне избыточной поворачиваемости (O/S), если поперечная сила задних колес 3, которые не представляют собой управляемые колеса, уменьшается, и характеристика руления изменяется к стороне недостаточной поворачиваемости (U/S), если поперечная сила задних колес 3 увеличивается.
[0040] Соответственно, на этапе S3, если поперечная сила передних колес 2 изменяется, с тем чтобы изменять характеристику руления к стороне недостаточной поворачиваемости, когда двигатель 6 прокручивается посредством первого мотора 7, ECU 15, управляет крутящим моментом второго мотора 11 таким образом, что поперечная сила задних колес 3 изменяется, с тем чтобы изменять характеристику руления к стороне избыточной поворачиваемости. Аналогично, если поперечная сила передних колес 2 изменяется, с тем чтобы изменять характеристику руления к стороне избыточной поворачиваемости, когда двигатель 6 прокручивается посредством первого мотора 7, ECU 15 управляет крутящим моментом второго мотора 11 таким образом, что поперечная сила задних колес 3 изменяется, с тем чтобы изменять характеристику руления к стороне недостаточной поворачиваемости.
[0041] Крутящий момент второго мотора 11 управляется посредством увеличения выходного крутящего момента или уменьшения выходного крутящего момента, согласно рабочему режиму или условиям движения гибридного транспортного средства 1, как описано ниже. Выходной крутящий момент второго мотора 11 изменяется с предварительно определенным градиентом или быстротой изменения. Например, как схематично показано на фиг. 6, ECU 15 увеличивает крутящий момент первого мотора 7 до данного значения во время t1, с тем чтобы проворачивать двигатель 6. Затем, наряду с управлением крутящим моментом первого мотора 7, ECU 15 увеличивает или уменьшает выходной крутящий момент второго мотора 11 с предварительно определенным градиентом или быстротой изменения. При таком управлении выходным крутящим моментом, крутящий момент приведения в движение гибридного транспортного средства 1 изменяется аккуратно или медленно, что позволяет не допускать или подавлять толчок или странное ощущение. Кроме того, когда выходной крутящий момент первого мотора 7 увеличивается, с тем чтобы проворачивать двигатель 6, и выходной крутящий момент второго мотора 11 изменяется, с тем чтобы предотвращать или ограничивать изменение характеристики руления вследствие увеличения выходного крутящего момента первого мотора 7, предпочтительно, если после изменения выходного крутящего момента первого мотора 7 и выходного крутящего момента второго мотора 11, ECU 15 дополнительно управляет первым мотором 7 и вторым мотором 11 таким образом, что крутящий момент приведения в движение гибридного транспортного средства 1 прикладывается в таком направлении, чтобы ускорять гибридное транспортное средство 1. В частности, если запрос на запуск двигателя 6 формируется на основе увеличения хода педали акселератора, ECU 15 управляет выходным крутящим моментом каждого из моторов 7, 11 таким образом, чтобы ускорять гибридное транспортное средство 1.
[0042] Величина изменения поперечной силы передних колес 2 и величина изменения поперечной силы задних колес 3 меняются в зависимости от величины изменения крутящего момента на колесе для передних колес 2 и величины изменения крутящего момента на колесе для задних колес 3, соответственно. Поперечная сила также может изменяться в зависимости от нагрузки при контакте транспортного средства с землей (осевой нагрузки), и нагрузка при контакте транспортного средства с землей может изменяться в зависимости от продольного ускорения транспортного средства. Соответственно, величина управления крутящего момента второго мотора 11 на этапе S3 получается следующим образом. Первоначально, получается величина изменения поперечной силы передних колес 2 на основе величины изменения крутящего момента на колесе для передних колес 2 вследствие прокручивания двигателя 6 и изменения нагрузки при контакте транспортного средства с землей передних колес 2, и получается изменение характеристики руления согласно величине изменения поперечной силы. Затем получается целевая величина изменения поперечной силы, сформированной на задних колесах 3, с тем чтобы уменьшать полученную характеристику руления, и получается крутящий момент на колесе для задних колес 3, который достигает целевой величины изменения, например, на основе изменений крутящего момента на колесе для задних колес 3 и нагрузки при контакте транспортного средства с землей. Затем ECU 15 управляет крутящим моментом второго мотора 11 таким образом, чтобы предоставлять крутящий момент на колесе, полученный таким способом на этапе S3. Хотя крутящий момент второго мотора 11 для ограничения изменения характеристики руления может получаться каждый раз посредством вычисления, согласно арифметическому выражению, подготовленному заранее, он также может получаться из карты вместо этого. А именно, может быть подготовлена карта, которая задает величину управления крутящим моментом второго мотора 11, например, согласно крутящему моменту на колесе для передних колес 2, его величине изменения, скорости транспортного средства, градиенту дороги и числу пассажиров, и величина управления крутящим моментом второго мотора 11 может вычисляться из карты.
[0043] После вышеописанного управления этапа S3 или параллельно с управлением этапа S3, двигатель запускается (этап S4), и ECU 15 возвращается. Управление этапа S4 представляет собой управление для увеличения выходного крутящего момента первого мотора 7 в положительном направлении, с тем чтобы проворачивать двигатель 6, и подачи или впрыска топлива в двигатель 6 для зажигания. После завершения запуска двигателя 6, ECU 15 управляет выходным крутящим моментом двигателя 6 и каждого из моторов 7, 11, согласно условиям движения, таким как величина запроса на приведение в движение, к примеру, ход педали акселератора и скорость транспортного средства, в рассматриваемый момент времени.
[0044] Как описано выше, крутящий момент за счет силы реакции прикладывается к передним колесам 2, когда двигатель 6 прокручивается посредством первого мотора 7. Даже если крутящий момент за счет силы реакции становится фактором изменения характеристики руления, ECU 15 управляет крутящим моментом задних колес 3 таким образом, чтобы ограничивать изменение характеристики руления. Таким образом, согласно системе управления этого варианта осуществления изобретения, когда двигатель 6 запускается в то время, когда транспортное средство поворачивает, изменение характеристики руления предотвращается или ограничивается, и устойчивость при движении повышается, либо исключается ее ухудшение. Кроме того, запуск двигателя 6 не нарушается или задерживается, что позволяет удовлетворять запрос на ускорение или запрос на приведение в движение и предотвращать или подавлять чрезмерный разряд устройства накопления мощности.
[0045] Далее описывается второй пример управления. Вышеописанное управление этапа S3 может быть выполнено с возможностью выполняться, когда гибридное транспортное средство 1 движется в EV-режиме. Управление этапа S3 заключается в том, чтобы предотвращать или ограничивать изменение характеристики руления вследствие прокручивания двигателя 6 посредством первого мотора 7 посредством изменения крутящего момента второго мотора 11. Например, ECU 15 может быть выполнен с возможностью определять то, задается или нет EV-режим, до выполнения вышеописанного управления этапа S3, и выполнять управление этапа S3, когда принято положительное решение ("Да"). Один пример этой конфигурации проиллюстрирован на фиг. 7. В примере управления, показанном на фиг. 7, этап S101 для определения того, задается или нет EV-режим, предоставляется после этапа S1 блок-схемы последовательности операций способа, показанной на фиг. 5. Если положительное решение ("Да") принято на этапе S101, этап S2 и следующие этапы выполняются. Поскольку пример управления, показанный на фиг. 7, является идентичным примеру управления, показанному на фиг. 5, за исключением этапа S101, ссылки с номерами, идентичные ссылкам с номерами, используемым на фиг. 5, назначаются соответствующим этапам на фиг. 7, и эти этапы не поясняются. Если отрицательное решение ("Нет") принято на этапе S101, ECU 15 переходит к этапу S4 и сразу осуществляет управление для запуска двигателя 6.
[0046] Далее описывается третий пример управления. Гибридное транспортное средство 1, к которому применяется это изобретение, может компоноваться таким образом, что задние колеса 3 приводятся в действие посредством двигателя 6, и может двигаться с помощью выходного крутящего момента второго мотора 11 либо может двигаться с помощью выходного крутящего момента двух моторов 7, 11 в EV-режиме. Соответственно, крутящий момент на колесе для передних колес 2 и крутящий момент на колесе для задних колес 3 во время поворота транспортного средства находятся в различных состояниях, в зависимости от типа или режима приведения в движение гибридного транспортного средства 1 и рабочего режима соответствующих моторов 7, 11 в этот момент времени. Система управления согласно этому варианту осуществления изобретения выполнена с возможностью осуществлять управление согласно типу приведения в движение гибридного транспортного средства 1 и рабочему режиму соответствующих моторов 7, 11 в данный момент времени. В дальнейшем описываются некоторые примеры управления. Хотя виды управления, которые описываются ниже, могут выполняться в качестве последовательности управляющих процедур, они поясняются в качестве отдельных управляющих процедур, для простоты пояснения.
[0047] Фиг. 8 является блок-схемой последовательности операций способа, применимой для пояснения примера управления в случае, если поворот транспортного средства в то время, когда оно движется в EV-режиме только с помощью крутящего момента приведения в движение второго мотора 11, и запуск двигателя осуществляются одновременно. Первоначально, ECU 15 определяет то, имеется или нет запрос на запуск двигателя 6 (этап S11). Это определение может быть выполнено способом, аналогичным определению этапа S1, показанного на фиг. 5, как описано выше. Если отрицательное решение ("Нет") принято на этапе S11, ECU 15 возвращается без выполнения конкретного управления. С другой стороны, если положительное решение ("Да") принято на этапе S11, ECU 15 определяет то, представляет собой EV-режим, заданный в этот момент времени, или нет режим (так называемый одноприводный режим приведения в движение), в котором транспортное средство движется с помощью выходного крутящего момента второго мотора 11, приводящего в действие только задние колеса 3 (этап S12). Это определение может быть выполнено на основе состояний вывода сигналов команд управления в соответствующие моторы 7, 11.
[0048] Если положительное решение ("Да") принято на этапе S12, ECU 15 определяет то, находится или нет транспортное средство в середине поворота (этапа S13). Определение этапа S13 может выполняться способом, аналогичным определению этапа S2, показанного на фиг. 5, как описано выше. Если положительное решение ("Да") принято на этапе S13, прокручивание двигателя 6 посредством первого мотора 7 может становиться фактором изменения характеристики руления; в силу этого, ECU 15 управляет крутящим моментом второго мотора 11 таким образом, чтобы предотвращать или ограничивать изменение характеристики руления (этап S14).
[0049] В состоянии, в котором транспортное средство движется с помощью задних колес 3, приводимых в действие посредством второго мотора 11, передние колеса 2 не приводятся в действие посредством первого мотора 7, и следовательно, поперечная сила передних колес 2 во время поворота максимизируется. Если крутящий момент за счет силы реакции прикладывается к передним колесам 2 в этом состоянии вследствие прокручивания двигателя 6 посредством первого мотора 7, передние колеса 2 принимают тормозной крутящий момент, и абсолютное значение крутящего момента на колесе для передних колес 2 увеличивается, приводя к уменьшению поперечной силы. А именно, поперечная сила передних колес 2 изменяется, с тем чтобы изменять характеристику руления к стороне недостаточной поворачиваемости. Таким образом, при управлении этапа S14, ECU 15 управляет крутящим моментом задних колес 3 таким образом, чтобы уменьшать изменение к стороне недостаточной поворачиваемости, вызываемое посредством передних колес 2. Более конкретно, выходной крутящий момент второго мотора 11 увеличивается, с тем чтобы увеличивать крутящий момент приведения в движение задних колес 3 (абсолютное значение крутящего момента на колесе). А именно, выходной крутящий момент второго мотора 11 увеличивается, так что поперечная сила задних колес 3 уменьшается, и характеристика руления изменяется к стороне избыточной поворачиваемости. Крутящий момент или величина управления может получаться способом, аналогичным способу, как описано выше относительно этапа S3 по фиг. 5.
[0050] Затем ECU 15 осуществляет управление для запуска двигателя 6 (этап S15) и после этого возвращается. Управление этапа S15 является аналогичным управлению этапа S4, показанного на фиг. 5, как описано выше.
[0051] С другой стороны, если отрицательное решение ("Нет") принято на вышеописанном этапе S12, или если отрицательное решение ("Нет") принято на этапе S13, ECU 15 сразу переходит к этапу S15, чтобы осуществлять управление для запуска двигателя 6. Это обусловлено тем, что гибридное транспортное средство 1 не движется или не поворачивает.
[0052] Таким образом, в примере управления, показанном на фиг. 8, крутящий момент за счет силы реакции, сформированный посредством прокручивания двигателя 6 посредством первого мотора 7, прикладывается в качестве тормозного крутящего момента к передним колесам 2. Как результат, поперечная сила передних колес 2 уменьшается, и характеристика руления изменяется к стороне недостаточной поворачиваемости. В этом случае, крутящий момент приведения в движение задних колес 3 увеличивается, и его поперечная сила уменьшается, так что характеристика руления изменяется к стороне избыточной поворачиваемости вследствие увеличения крутящего момента приведения в движение задних колес 3. Следовательно, изменение характеристики руления в сторону недостаточной поворачиваемости, вызываемое посредством запуска двигателя 6, отменяется или уменьшается посредством изменения характеристики руления в сторону избыточной поворачиваемости, вызываемого посредством увеличения крутящего момента приведения в движение задних колес 3. Следовательно, не допускается изменение или становится менее вероятным изменение характеристики руления гибридного транспортного средства 1 в целом.
[0053] Далее описывается четвертый пример управления. А именно, описывается пример управления, в котором транспортное средство движется в EV-режиме с использованием моторов 7, 11. Фиг. 9 является блок-схемой последовательности операций способа, применимой для пояснения одного примера управления. Первоначально, ECU 15 определяет то, имеется или нет запрос на запуск двигателя 6 (этап S21). Это определение может быть выполнено способом, аналогичным определению этапа S1, показанного на фиг. 5, как описано выше. Если отрицательное решение ("Нет") принято на этапе S21, ECU 15 возвращается без выполнения конкретного управления. С другой стороны, если положительное решение ("Да") принято на этапе S21, ECU 15 определяет то, представляет собой EV-режим в то время, когда ECU 15 определяет то, что имеется запрос на запуск двигателя 6, или нет режим (так называемый режим приведения в движение за счет обоих моторов), в котором транспортное средство движется посредством приведения в действие моторов 7, 11 (этап S22). Это определение может быть выполнено на основе состояния вывода сигнала команды управления в каждый из моторов 7, 11.
[0054] Если положительное решение ("Да") принято на этапе S22, ECU 15 определяет то, находится или нет транспортное средство в середине поворота в ходе движения (этапа S23). Определение на этапе S23 может выполняться способом, аналогичным определению этапа S2, показанного на фиг. 5, как описано выше. Если положительное решение ("Да") принято на этапе S23, ECU 15 определяет то, равен или выше либо нет коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 предварительно определенного опорного значения α (этап S24). В так называемом режиме приведения в движение за счет обоих моторов, предпочтительно, если каждый из моторов 7, 11 работает с максимально возможной эффективностью. С этой целью, крутящий момент, доставляемый посредством каждого из моторов 7, 11, а именно, отношение выходного крутящего момента каждого мотора 7, 11 к полному крутящему моменту варьируется в зависимости от скорости транспортного средства, состояния ускорения и т.д. Коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2, определенный на этапе S24, является отношением крутящего момента приведения в движение, доставляемого на передних колесах 2 (или крутящего момента приведения в движение, передаваемого передним колесам 2), к полному крутящему моменту гибридного транспортного средства 1. Полный крутящий момент гибридного транспортного средства 1 может получаться на основе хода педали акселератора или может получаться из сигналов команд управления, передаваемых в соответствующие моторы 7, 11. Кроме того, крутящий момент приведения в движение передних колес 2 может получаться из сигнала команды управления в первый мотор 7. Дополнительно, опорное значение α является значением, на основе которого определяется то, находится характеристика руления гибридного транспортного средства 1 на стороне избыточной поворачиваемости или на стороне недостаточной поворачиваемости. Опорное значение α может получаться, например, посредством эксперимента с использованием фактического транспортного средства или посредством моделирований. Опорное значение α может быть константой или может быть переменной, которая изменяется согласно скорости транспортного средства, весу нагрузки, числу пассажиров, градиенту дороги и т.д.
[0055] Когда коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 равен или выше опорного значения α, и положительное решение ("Да") принято на этапе S24, крутящий момент приведения в движение (абсолютное значение крутящего момента на колесе) передних колес 2 во время поворота транспортного средства является большим, и следовательно, поперечная сила передних колес 2 является небольшой. Соответственно, характеристика руления гибридного транспортного средства 1 находится на стороне недостаточной поворачиваемости. Если двигатель 6 проворачивается посредством первого мотора 7 в этом состоянии, крутящий момент приведения в движение (абсолютное значение крутящего момента на колесе) передних колес 2 уменьшается, и поперечная сила передних колес 2 увеличивается. Как результат, характеристика руления подвержена изменению для уменьшенной вероятности недостаточной поворачиваемости или изменению к стороне избыточной поворачиваемости. ECU 15 управляет крутящим моментом второго мотора 11 (этап S25) таким образом, чтобы предотвращать или ограничивать такое изменение характеристики руления. Это управление заключается в том, чтобы изменять крутящий момент приведения в движение (абсолютное значение крутящего момента на колесе) задних колес 3 или поперечную силу, с тем чтобы изменять характеристику руления к стороне недостаточной поворачиваемости. Следовательно, выходной крутящий момент второго мотора 11 уменьшается, с тем чтобы увеличивать поперечную силу задних колес 3. Крутящий момент или величина управления могут получаться способом, аналогичным способу, поясненному выше относительно этапа S3 по фиг. 5. Кроме того, предпочтительно управлять способом изменения выходного крутящего момента второго мотора 11 таким образом, что сумма выходных крутящих моментов соответствующих моторов 7, 11 после изменения предоставляет крутящий момент, прикладываемый в направлении ускорения, по идентичной причине, как описано выше относительно этапа S3 по фиг. 5, как описано выше.
[0056] Затем ECU 15 осуществляет управление для запуска двигателя 6 (этап S26) и после этого возвращается. Управление этапа S26 является аналогичным управлению этапа S4, показанного на фиг. 5, как описано выше.
[0057] С другой стороны, если отрицательное решение ("Нет") принято на вышеуказанном этапе S22, а именно, если транспортное средство не находится в режиме приведения в движение за счет обоих моторов, нет необходимости осуществлять управление на основе коэффициента ΔTdf разделения крутящего момента приведения в движение передних колес 2. Соответственно, в этом случае, ECU 15 сразу переходит к этапу S26 и выполняет управление для запуска двигателя 6. Кроме того, если отрицательное решение ("Нет") принято на вышеуказанном этапе S23, а именно, если гибридное транспортное средство 1 не находится в середине поворота, ECU 15 сразу переходит к этапу S26 и выполняет управление для запуска двигателя 6. Дополнительно, если отрицательное решение ("Нет") принято на вышеуказанном этапе S24, ECU 15 сразу переходит к этапу S26 и выполняет управление для запуска двигателя 6.
[0058] Таким образом, в примере управления, показанном на фиг. 9, также, характеристика руления изменяется вследствие изменения крутящего момента на колесе для передних колес 2 в направлении, противоположном направлению, в котором характеристика руления изменяется вследствие изменения крутящего момента на колесе для задних колес 3. Следовательно, даже если двигатель 6 запускается в то время, когда транспортное средство поворачивает, становится менее вероятным или маловероятным изменение характеристики руления, и может повышаться устойчивость при движении гибридного транспортного средства 1. Кроме того, поскольку запуск двигателя 6 не ограничивается, запрос на ускорение или запрос на приведение в движение может удовлетворяться. Дополнительно, двигатель 6 приводится в действие, так что мощность может формироваться посредством первого мотора 7; в силу этого, не допускается чрезмерный разряд либо становится менее вероятным чрезмерный разряд устройства накопления мощности.
[0059] Далее описывается пятый пример управления. В отличие от примера управления, показанного на фиг. 9, пример управления, показанный на фиг. 10, направлен на случай, в котором коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 является небольшим. Предварительно определенное значение, на основе которого определяется то, является коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 большим или небольшим, в примере управления, показанном на фиг. 10, может отличаться от вышеуказанного опорного значения α. Тем не менее, опорное значение α может использоваться. В примере, описанном ниже, на основе опорного значения α определяется то, является коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 большим или небольшим.
[0060] В примере управления, показанном на фиг. 10, ECU 15 определяет то, имеется или нет запрос на запуск двигателя 6 (этап S31), то, находится или нет транспортное средство в так называемом режиме приведения в движение за счет обоих моторов (этап S32), и то, находится или нет транспортное средство в середине поворота (этапа S33), аналогично примеру управления, показанному на фиг. 9, как описано выше. Эти этапы определения могут быть идентичными этапам определения на этапах S21-S23, показанных на фиг. 9.
[0061] Если положительное решение ("Да") принято на этапе S33, ECU 15 определяет то, меньше или нет коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 вышеуказанного опорного значения α (этап S34). Когда коэффициент ΔTdf разделения крутящего момента приведения в движение передних колес 2 меньше опорного значения α, и положительное решение ("Да") принято на этапе S34, крутящий момент приведения в движение (абсолютное значение крутящего момента на колесе) передних колес 2 во время поворота транспортного средства является небольшим, и следовательно, поперечная сила передних колес 2 является большой. Соответственно, характеристика руления гибридного транспортного средства 1 находится на стороне избыточной поворачиваемости. Если двигатель 6 проворачивается посредством первого мотора 7 в этом состоянии, крутящий момент за счет силы реакции, вызываемый посредством прокручивания двигателя, прикладывается к передним колесам 2. В состоянии, в котором крутящий момент приведения в движение (абсолютное значение крутящего момента на колесе), передаваемый передним колесам 2, первоначально является небольшим, если крутящий момент за счет силы реакции превышает крутящий момент приведения в движение, передаваемый передним колесам 2, крутящий момент за счет силы реакции превращается в тормозной крутящий момент передних колес 2, и абсолютное значение крутящего момента на колесе увеличивается. Как результат, поперечная сила передних колес 2 может уменьшаться. В этом случае, характеристика руления изменяется вследствие прокручивания двигателя к стороне недостаточной поворачиваемости. Таким образом, если положительное решение ("Да") принято на этапе S34, ECU 15 увеличивает выходной крутящий момент второго мотора 11 (этап S35), с тем чтобы увеличивать абсолютное значение крутящего момента на колесе для задних колес 3 и уменьшать поперечную силу задних колес 3, так что характеристика руления изменяется к стороне избыточной поворачиваемости. В этой связи, крутящий момент или величина управления может получаться способом, аналогичным способу, поясненному выше относительно этапа S3 по фиг. 5. Кроме того, предпочтительно управлять способом изменения выходного крутящего момента второго мотора 11 таким образом, что сумма выходных крутящих моментов соответствующих моторов 7, 11 после изменения предоставляет крутящий момент, прикладываемый в направлении ускорения, по идентичной причине, как описано выше относительно этапа S3 по фиг. 5.
[0062] Затем ECU 15 осуществляет управление для запуска двигателя 6 (этап S36) и после этого возвращается. Управление этапа S36 является аналогичным управлению этапа S4, показанного на фиг. 5, как описано выше. Аналогично примеру управления, показанному на фиг. 9, как описано выше, ECU 15 возвращается без выполнения конкретного управления, если отрицательное решение ("Нет") принято на этапе S31 и ECU 15 сразу переходит к этапу S36 и выполняет управление для запуска двигателя 6, когда отрицательное решение ("Нет") принято на этапе S32, этапе S33 и этапе S34.
[0063] Таким образом, в примере управления, показанном на фиг. 10, также, характеристика руления изменяется вследствие изменения крутящего момента на колесе для передних колес 2 в направлении, противоположном направлению, в котором характеристика руления изменяется вследствие изменения крутящего момента на колесе для задних колес 3. Следовательно, даже если двигатель 6 запускается в то время, когда транспортное средство поворачивает, становится менее вероятным или маловероятным изменение характеристики руления, и может повышаться устойчивость при движении гибридного транспортного средства 1. Кроме того, поскольку запуск двигателя 6 не ограничивается, запрос на ускорение или запрос на приведение в движение может удовлетворяться. Дополнительно, двигатель 6 приводится в действие, так что мощность может формироваться посредством первого мотора 7; в силу этого, не допускается чрезмерный разряд либо становится менее вероятным чрезмерный разряд устройства накопления мощности.
[0064] Отношение крутящего момента приведения в движение, передаваемого передним колесам 2, и отношение крутящего момента приведения в движение, передаваемого задним колесам 3, имеют такую взаимосвязь, что по мере того, как одно из отношений увеличивается, другое отношение снижается. Таким образом, в примере управления, показанном на фиг. 9, и в примере управления, показанном на фиг. 10, коэффициент разделения крутящего момента приведения в движение задних колес 3 может сравниваться с опорным значением α или предварительно определенным значением, которое заменяет опорное значение α, вместо сравнения коэффициента ΔTdf разделения крутящего момента приведения в движение передних колес 2 с опорным значением α. Затем крутящий момент второго мотора 11 может управляться на основе результата сравнения.
[0065] Далее описывается шестой пример управления. Как описано выше, если крутящий момент на колесе для передних колес 2 уменьшается, поперечная сила увеличивается, и характеристика руления изменяется к стороне избыточной поворачиваемости. Кроме того, если крутящий момент на колесе для задних колес 3 уменьшается, поперечная сила увеличивается, и характеристика руления изменяется к стороне недостаточной поворачиваемости. Соответственно, контент управления может отличаться между случаем, в котором крутящий момент на колесе для передних колес 2 уменьшается вследствие прокручивания двигателя 6, и случаем, в котором крутящий момент на колесе для задних колес 3 уменьшается вследствие прокручивания двигателя 6. В вышеописанных втором-пятом примерах управления, крутящий момент на колесе для передних колес 2 уменьшается вследствие прокручивания двигателя 6. В отличие от этих примеров, управление, как описано ниже, выполняется, когда двигатель 6 и первый мотор 7 соединяются с задними колесами 3, и второй мотор 11 соединяется с передними колесами 2.
[0066] В примере управления, показанном на фиг. 8, как описано выше, двигатель 6 запускается из состояния, в котором задние колеса 3 приводятся в действие посредством второго мотора 11, и крутящий момент не доставляется из первого мотора 7 на передние колеса 2. В случае если передние колеса 2 и задние колеса 3 переключаются между собой в этом примере управления, двигатель 6 проворачивается посредством первого мотора 7, в ходе движения в EV-режиме, в котором передние колеса 2 приводятся в действие посредством второго мотора 11, так что крутящий момент на колесе (крутящий момент в направлении торможения) задних колес 3 формируется. Как результат, крутящий момент на колесе для задних колес 3 увеличивается, и поперечная сила задних колес 3 уменьшается. Соответственно, в этом случае, характеристика руления изменяется к стороне избыточной поворачиваемости вследствие прокручивания двигателя 6. Поскольку поперечная сила передних колес 2 должна уменьшаться, с тем чтобы ограничивать изменение характеристики руления, ECU 15 увеличивает выходной крутящий момент второго мотора 11, соединенного с передними колесами 2. А именно, выполняется управление, аналогичное управлению крутящим моментом второго мотора 11, на этапе S14, показанном на фиг. 8.
[0067] Далее описывается седьмой пример управления. В случае если передние колеса 2 и задние колеса 3 переключаются между собой, и передние колеса 2 приводятся в действие посредством второго мотора 11, в то время как первый мотор 7 и двигатель 6 соединяются с задними колесами 3, в примере управления, показанном на фиг. 9, как описано выше, крутящий момент приведения в движение задних колес 3 уменьшается, и поперечная сила задних колес 3 увеличивается вследствие прокручивания двигателя 6. В этом случае, коэффициент разделения крутящего момента приведения в движение задних колес 3 является небольшим, и поперечная сила задних колес 3 является большой. Соответственно, характеристика руления находится на стороне недостаточной поворачиваемости. Если двигатель 6 проворачивается в этом состоянии, и крутящий момент за счет силы реакции прикладывается к задним колесам 3, крутящий момент за счет силы реакции может становиться больше крутящего момента до начала управления двигателем 6 и может прикладываться в направлении торможения. В этом случае, поперечная сила задних колес 3 уменьшается, за счет этого заставляя характеристику руления изменяться к стороне избыточной поворачиваемости. Поскольку поперечная сила передних колес 2, имеющих больший коэффициент разделения крутящего момента приведения в движение, должна уменьшаться, с тем чтобы ограничивать изменение характеристики руления, ECU 15 увеличивает выходной крутящий момент второго мотора 11, с которым соединяются передние колеса 2. А именно, выполняется управление, которое является противоположным направлению изменения крутящего момента относительно управления крутящим моментом второго мотора 11 на этапе S25, показанном на фиг. 9.
[0068] Далее описывается восьмой пример управления. В случае если передние колеса 2 и задние колеса 3 переключаются между собой, и передние колеса 2 приводятся в действие посредством второго мотора 11, в то время как первый мотор 7 и двигатель 6 соединяются с задними колесами 3, в примере управления по фиг. 10, крутящий момент приведения в движение задних колес 3 уменьшается, и поперечная сила задних колес 3 увеличивается вследствие прокручивания двигателя 6. В этом случае, коэффициент разделения крутящего момента приведения в движение задних колес 3 является большим, и поперечная сила задних колес 3 является небольшой. Соответственно, характеристика руления находится на стороне избыточной поворачиваемости. В этом состоянии, если крутящий момент за счет силы реакции прикладывается к задним колесам 3 вследствие прокручивания двигателя 6, крутящий момент приведения в движение задних колес 3 уменьшается, и поперечная сила задних колес 3 увеличивается, так что характеристика руления изменяется к стороне недостаточной поворачиваемости. Поскольку поперечная сила передних колес 2, имеющих меньший коэффициент разделения крутящего момента приведения в движение, должна увеличиваться, с тем чтобы ограничивать изменение характеристики руления, ECU 15 уменьшает выходной крутящий момент второго мотора 11, с которым соединяются передние колеса 2. А именно, выполняется управление, которое является противоположным направлению изменения крутящего момента относительно управления крутящим моментом второго мотора 11 на этапе S35, показанном на фиг. 10.
[0069] Ниже описываются другие примеры управления. Система управления согласно этому варианту осуществления изобретения выполнена с возможностью управлять поперечной силой во время поворота транспортного средства посредством управления выходным крутящим моментом мотора 7, 11. Определение или обнаружение поворота может проводиться посредством использования различных датчиков, как описано выше. Вместо этого, поворот транспортного средства может прогнозироваться, и выходной крутящий момент мотора 7, 11 может управляться, как описано выше, на основе результата прогнозирования. Прогнозирование поворота может выполняться с использованием картографических данных навигационной системы и данных позиции рассматриваемого транспортного средства, полученных посредством GPS-системы. Прогнозирование поворота также может выполняться с использованием данных расписания движения на несколько секунд вперед, которое получается посредством системы автоматического вождения. Кроме того, прогнозирование поворота может включать в себя прогнозирование направления поворота, радиуса поворота, скорости транспортного средства, расстояния поворота, градиента поверхности дороги, на которой транспортное средство поворачивает, и т.д. На основе этих элементов данных, поворот может определяться заранее, и движущая сила во время поворота может управляться. Если выполняется так называемое управление прогнозированием, как описано выше, можно предотвращать или ограничивать изменение характеристики руления с более высокой надежностью и повышать устойчивость при движении, когда двигатель 6 запускается во время поворота.
[0070] Хотя выше описаны некоторые варианты осуществления или примеры изобретения, это изобретение не ограничено вышеописанными вариантами осуществления и может изменяться надлежащим образом при условии, что задача изобретения решается. Например, в качестве электронного модуля управления согласно этому изобретению, могут предоставляться электронный модуль управления, который управляет двигателем, и электронный модуль управления, предусмотренный для каждого мотора для управления мотором, либо может предоставляться другой электронный модуль управления, который интегрирует эти электронные модули управления и управляет двигателем и моторами. Дифференциальный механизм согласно этому изобретению должен быть выполнен с возможностью осуществлять дифференциальную операцию только, по меньшей мере, с помощью трех вращательных элементов; в силу этого, он может представлять собой механизм, отличный от планетарной зубчатой передачи.

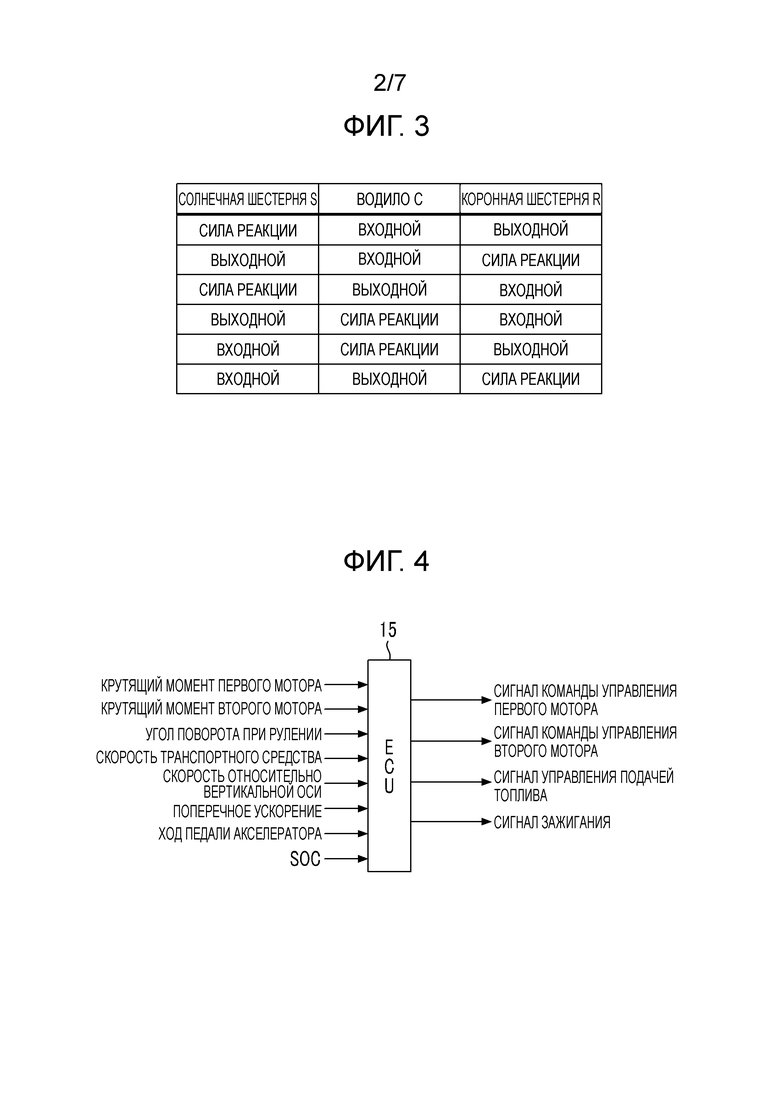
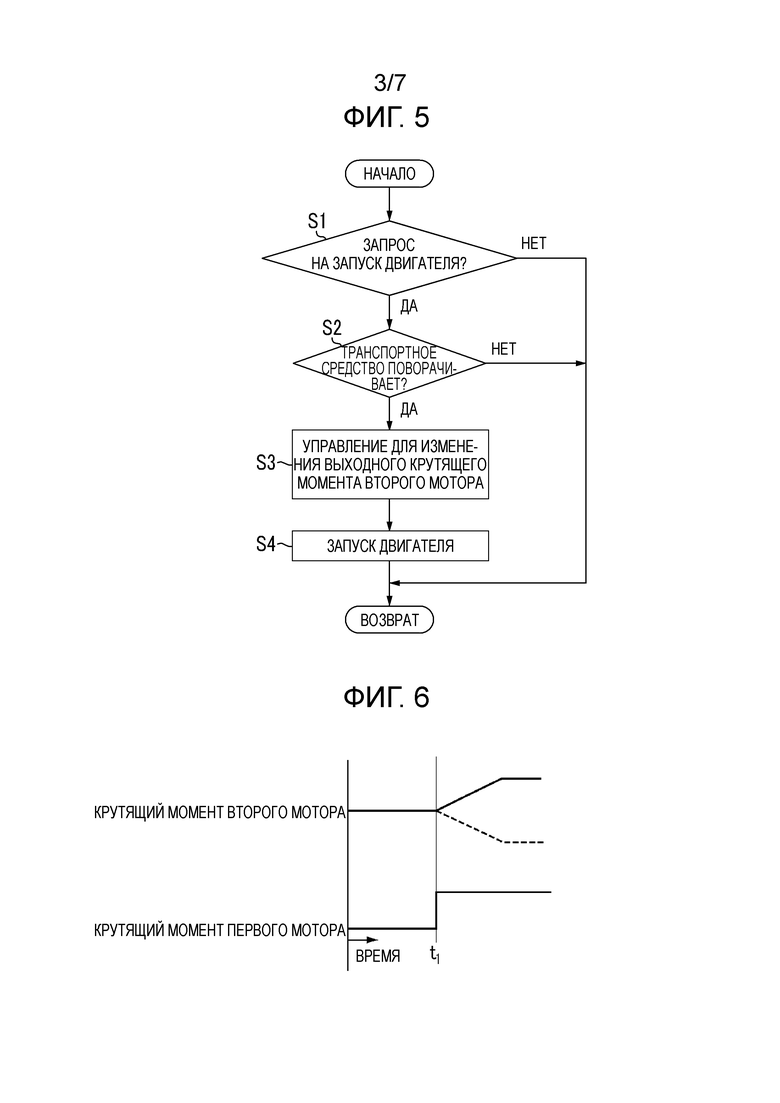
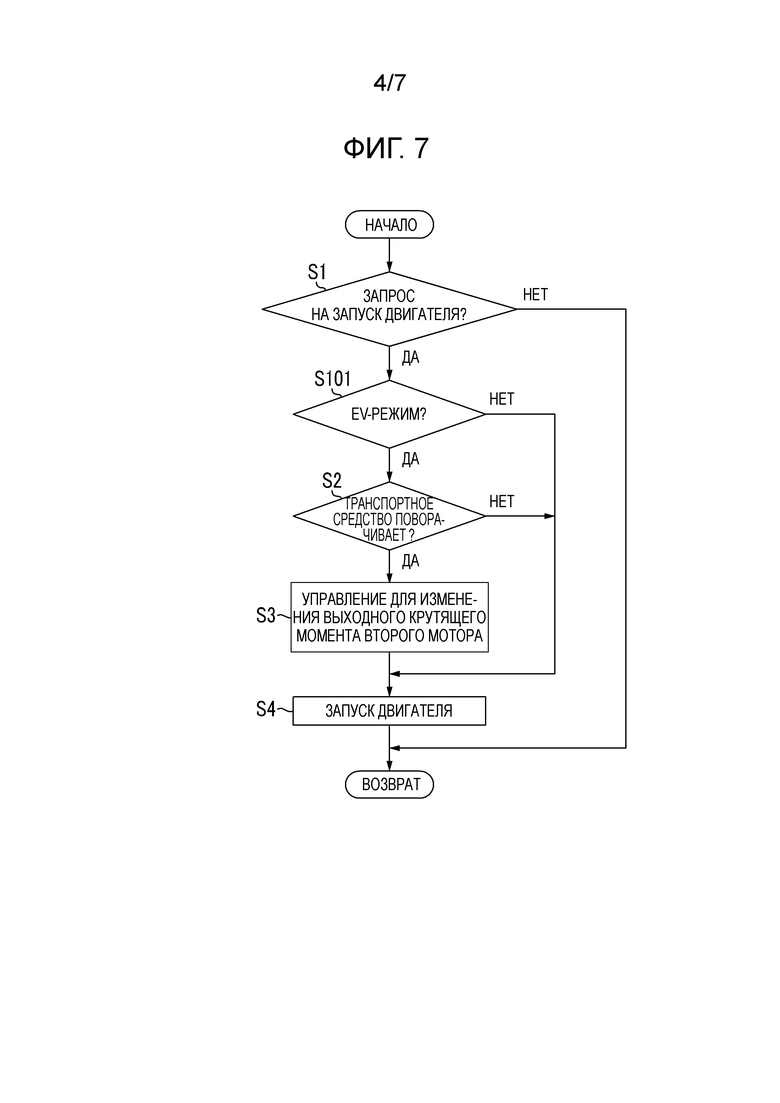
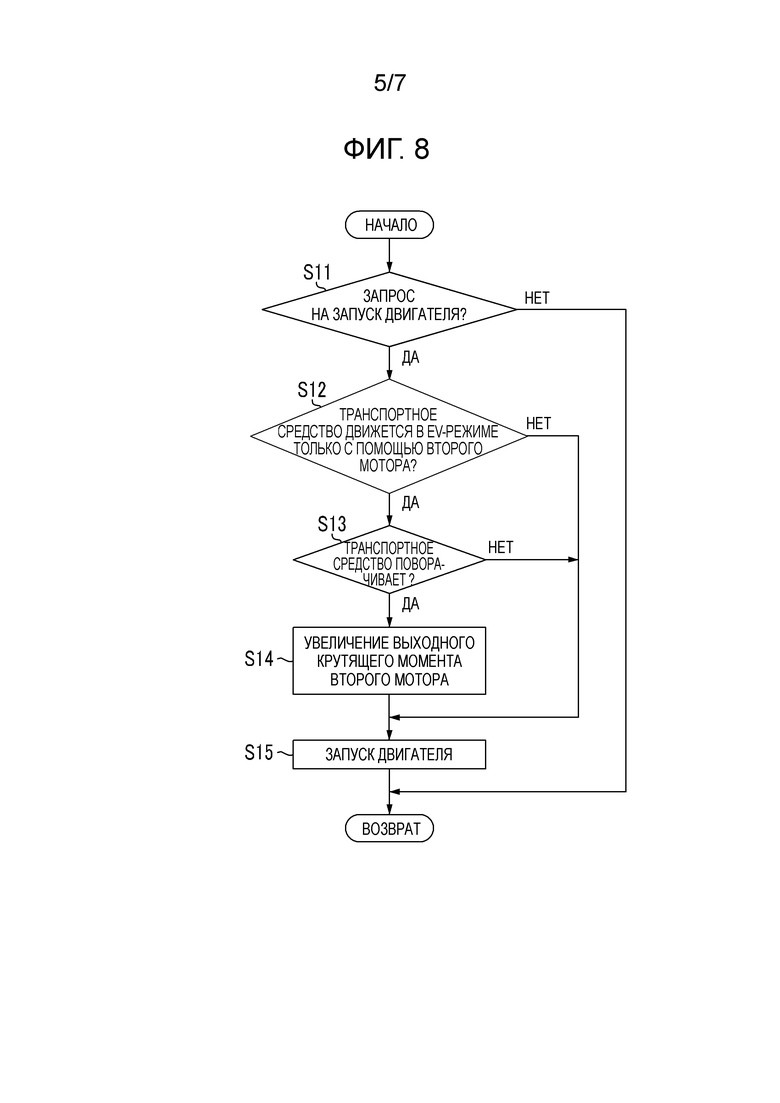
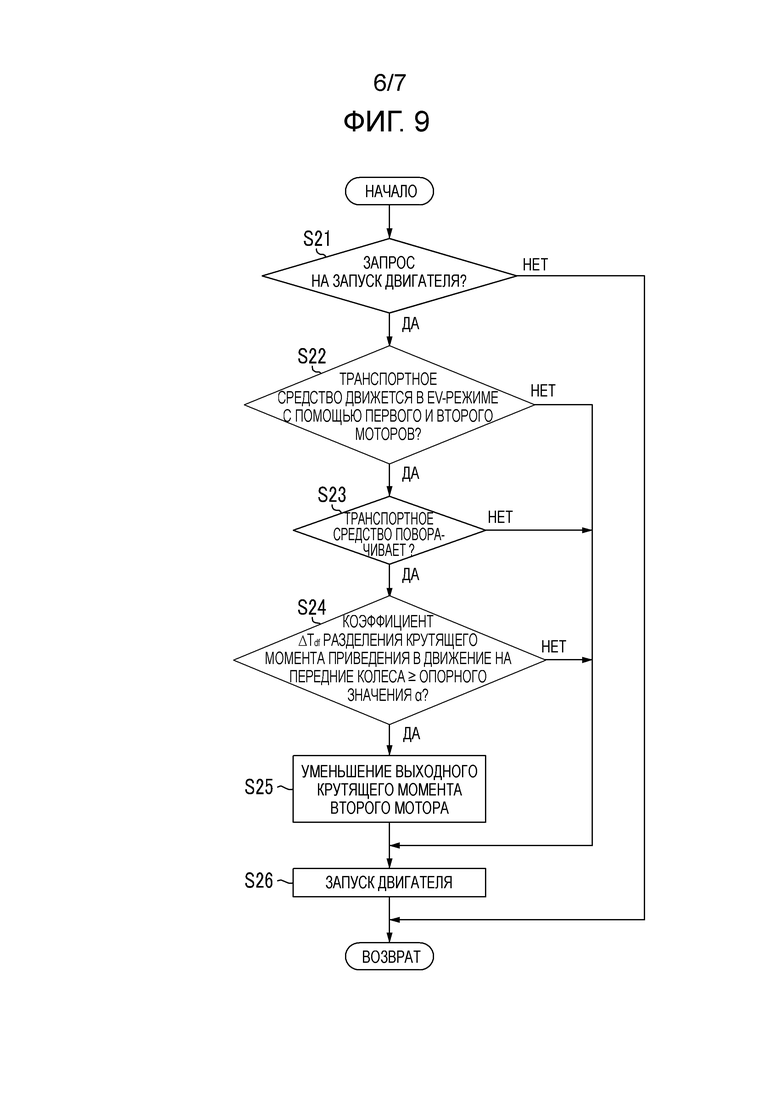
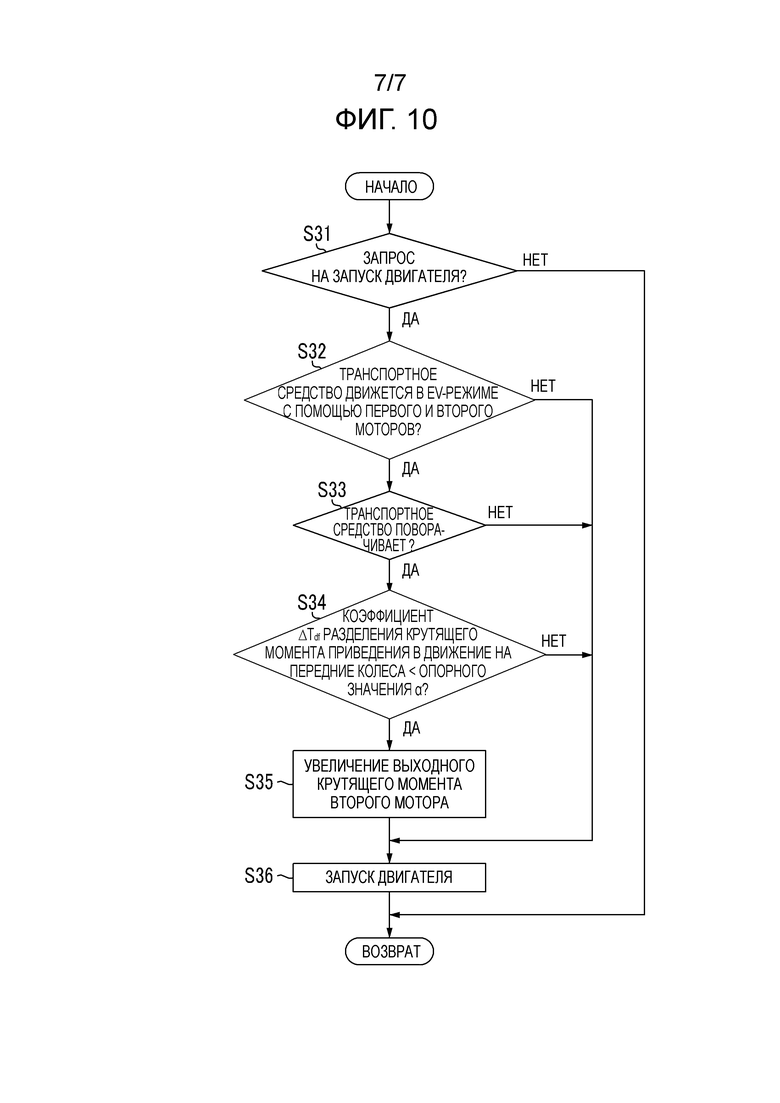
Изобретение относится к гибридным транспортным средствам. Система управления ведущими колесами гибридного транспортного средства содержит электронный модуль управления, позволяющий выполнять прокручивание двигателя посредством первого мотора и управлять выходным крутящим моментом второго мотора, когда прокручивается двигатель посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора. Улучшается управляемость и устойчивость при движении. 3 н. и 12 з.п. ф-лы, 10 ил.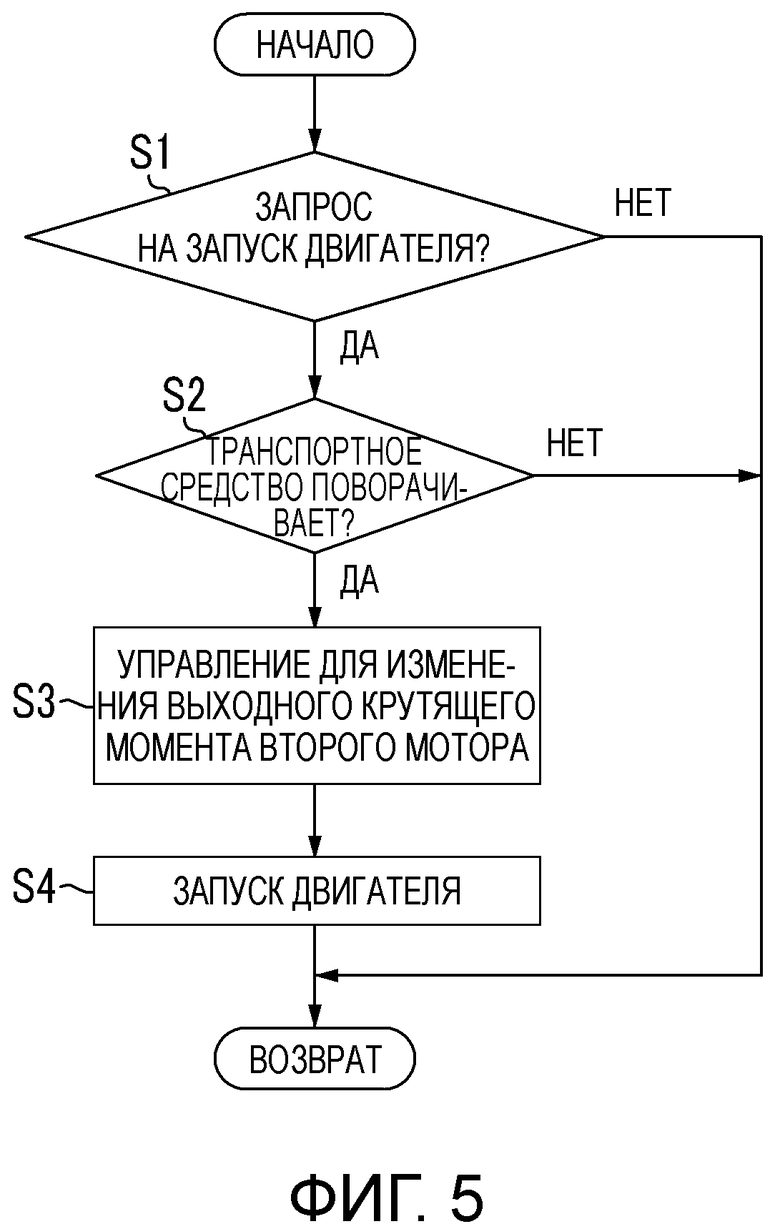
1. Система управления ведущими колесами гибридного транспортного средства, причем гибридное транспортное средство включает в себя:
двигатель и первый мотор, каждый из которых выполнен с возможностью доставлять крутящий момент приведения в движение на первые ведущие колеса в качестве одной пары из передних колес и задних колес,
второй мотор, выполненный с возможностью доставлять крутящий момент приведения в движение на вторые ведущие колеса в качестве другой пары из передних колес и задних колес, и
дифференциальный механизм, включающий в себя:
первый вращательный элемент, выполненный с возможностью принимать крутящий момент двигателя,
второй вращательный элемент, выполненный с возможностью принимать крутящий момент первого мотора, и
третий вращательный элемент, выполненный с возможностью доставлять крутящий момент на первые ведущие колеса,
причем система управления содержит:
электронный модуль управления, выполненный с возможностью:
выполнять прокручивание двигателя посредством первого мотора; и
управлять выходным крутящим моментом второго мотора, когда выполняется прокручивание двигателя посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора.
2. Система по п. 1, в которой:
первые ведущие колеса представляют собой передние колеса, а вторые ведущие колеса представляют собой задние колеса, и
электронный модуль управления выполнен с возможностью увеличивать выходной крутящий момент второго мотора, когда выполняется прокручивание двигателя посредством первого мотора, и гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента второго мотора.
3. Система по п. 1, в которой:
первые ведущие колеса представляют собой задние колеса, а вторые ведущие колеса представляют собой передние колеса, и
электронный модуль управления выполнен с возможностью увеличивать выходной крутящий момент второго мотора, когда выполняется прокручивание двигателя посредством первого мотора, в одном из состояния, в котором гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента второго мотора, и состояния, в котором гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
4. Система по п. 1, в которой:
первые ведущие колеса представляют собой передние колеса, а вторые ведущие колеса представляют собой задние колеса, и
электронный модуль управления выполнен с возможностью:
определять то, является ли коэффициент разделения крутящего момента приведения в движение передних колес равным либо большим, чем предварительно определенное опорное значение; и
уменьшать выходной крутящий момент второго мотора, когда коэффициент разделения крутящего момента приведения в движение передних колес равен или выше опорного значения, и выполняется прокручивание двигателя посредством первого мотора;
коэффициент разделения крутящего момента приведения в движение передних колес является отношением крутящего момента приведения в движение передних колес к полному крутящему моменту приведения в движение гибридного транспортного средства, когда гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
5. Система по п. 1, в которой:
первые ведущие колеса представляют собой передние колеса, а вторые ведущие колеса представляют собой задние колеса, и
электронный модуль управления выполнен с возможностью:
определять то, меньше ли коэффициент разделения крутящего момента приведения в движение передних колес, чем предварительно определенное опорное значение; и
увеличивать выходной крутящий момент второго мотора, когда коэффициент разделения крутящего момента приведения в движение передних колес меньше опорного значения, и выполняется прокручивание двигателя посредством первого мотора;
коэффициент разделения крутящего момента приведения в движение передних колес является отношением крутящего момента приведения в движение передних колес к полному крутящему моменту приведения в движение гибридного транспортного средства, когда гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
6. Система по любому из пп. 1-5, в которой:
электронный модуль управления выполнен с возможностью изменять выходной крутящий момент второго мотора с предварительно определенной скоростью изменения.
7. Система по любому из пп. 1-5, в которой:
электронный модуль управления выполнен с возможностью дополнительно управлять выходным крутящим моментом первого мотора и выходным крутящим моментом второго мотора таким образом, что полный крутящий момент в качестве суммы крутящего момента на первых ведущих колесах и крутящего момента на вторых ведущих колесах после того, как выходной крутящий момент второго мотора управляется в таком направлении, чтобы ограничивать изменение характеристики руления, прикладывается в таком направлении, чтобы ускорять гибридное транспортное средство.
8. Гибридное транспортное средство, содержащее:
двигатель и первый мотор, каждый из которых выполнен с возможностью доставлять крутящий момент приведения в движение на первые ведущие колеса в качестве одной пары из передних колес и задних колес;
второй мотор, выполненный с возможностью доставлять крутящий момент приведения в движение на вторые ведущие колеса в качестве другой пары из передних колес и задних колес; и
дифференциальный механизм, включающий в себя:
первый вращательный элемент, выполненный с возможностью принимать крутящий момент двигателя,
второй вращательный элемент, выполненный с возможностью принимать крутящий момент первого мотора, и
третий вращательный элемент, выполненный с возможностью доставлять крутящий момент на первые ведущие колеса; и
электронный модуль управления, выполненный с возможностью:
выполнять прокручивание двигателя посредством первого мотора, и
управлять выходным крутящим моментом второго мотора, когда выполняется прокручивание двигателя посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора.
9. Гибридное транспортное средство по п. 8, в котором:
первые ведущие колеса представляют собой передние колеса, а вторые ведущие колеса представляют собой задние колеса, и
электронный модуль управления выполнен с возможностью увеличивать выходной крутящий момент второго мотора, когда выполняется прокручивание двигателя посредством первого мотора, и гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента второго мотора.
10. Гибридное транспортное средство по п. 8, в котором:
первые ведущие колеса представляют собой задние колеса, а вторые ведущие колеса представляют собой передние колеса, и
электронный модуль управления выполнен с возможностью увеличивать выходной крутящий момент второго мотора, когда выполняется прокручивание двигателя посредством первого мотора, в одном из состояния, в котором гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента второго мотора, и состояния, в котором гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
11. Гибридное транспортное средство по п. 8, в котором:
первые ведущие колеса представляют собой передние колеса, а вторые ведущие колеса представляют собой задние колеса, и
электронный модуль управления выполнен с возможностью:
определять то, является ли коэффициент разделения крутящего момента приведения в движение передних колес равным или большим, чем предварительно определенное опорное значение; и
уменьшать выходной крутящий момент второго мотора, когда коэффициент разделения крутящего момента приведения в движение передних колес равен или выше опорного значения, и выполняется прокручивание двигателя посредством первого мотора,
коэффициент разделения крутящего момента приведения в движение передних колес является отношением крутящего момента приведения в движение передних колес к полному крутящему моменту приведения в движение гибридного транспортного средства, когда гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
12. Гибридное транспортное средство по п. 8, в котором:
первые ведущие колеса представляют собой передние колеса, а вторые ведущие колеса представляют собой задние колеса, и
электронный модуль управления выполнен с возможностью:
определять то, меньше ли коэффициент разделения крутящего момента приведения в движение передних колес, чем предварительно определенное опорное значение; и
увеличивать выходной крутящий момент второго мотора, когда коэффициент разделения крутящего момента приведения в движение передних колес меньше опорного значения, и выполняется прокручивание двигателя посредством первого мотора,
коэффициент разделения крутящего момента приведения в движение передних колес является отношением крутящего момента приведения в движение передних колес к полному крутящему моменту приведения в движение гибридного транспортного средства, когда гибридное транспортное средство поворачивает при движении с помощью выходного крутящего момента первого мотора и выходного крутящего момента второго мотора.
13. Гибридное транспортное средство по любому из пп. 8-12, в котором:
электронный модуль управления выполнен с возможностью изменять выходной крутящий момент второго мотора с предварительно определенной скоростью изменения.
14. Гибридное транспортное средство по любому из пп. 8-12, в котором:
электронный модуль управления выполнен с возможностью дополнительно управлять выходным крутящим моментом первого мотора и выходным крутящим моментом второго мотора таким образом, что полный крутящий момент в качестве суммы крутящего момента на первых ведущих колесах и крутящего момента на вторых ведущих колесах после того, как выходной крутящий момент второго мотора управляется в таком направлении, чтобы ограничивать изменение характеристики руления, прикладывается в таком направлении, чтобы ускорять гибридное транспортное средство.
15. Способ управления ведущими колесами гибридного транспортного средства, причем гибридное транспортное средство включает в себя:
двигатель и первый мотор, выполненные с возможностью доставлять крутящий момент приведения в движение на первые ведущие колеса в качестве одной пары из передних колес и задних колес,
второй мотор, выполненный с возможностью доставлять крутящий момент приведения в движение на вторые ведущие колеса в качестве другой пары из передних колес и задних колес,
дифференциальный механизм, включающий в себя:
первый вращательный элемент, выполненный с возможностью принимать крутящий момент двигателя,
второй вращательный элемент, выполненный с возможностью принимать крутящий момент первого мотора,
третий вращательный элемент, выполненный с возможностью доставлять крутящий момент на первые ведущие колеса, и
электронный модуль управления, выполненный с возможностью выполнять прокручивание двигателя посредством первого мотора,
при этом способ управления содержит этап, на котором:
управляют, посредством электронного модуля управления, выходным крутящим моментом второго мотора, когда выполняется прокручивание двигателя посредством первого мотора в то время, когда гибридное транспортное средство поворачивает при остановленном двигателе, в таком направлении, чтобы ограничивать изменение характеристики руления гибридного транспортного средства вследствие изменения крутящего момента приведения в движение первых ведущих колес, вызываемого посредством прокручивания двигателя посредством первого мотора.
| US 2010071975 A1, 25.03.2010 | |||
| FR 3008056 A1, 09.01.2015 | |||
| US 2011257826 A1, 20.10.2011 | |||
| US 2008004780 A1, 03.01.2008. |

