Изобретение относится к области судостроения и касается вопросов создания средств для осуществления транспортировки, установки, снятия грузов под водой, а также для осмотра, технического обслуживания, ремонта подводных сооружений и проведения специализированных операций, таких как подледные сейсмические исследования и ликвидация подледных разливов нефти.
Известно изобретение «Способ осуществления подъемно-транспортной операции и подводное судно для его осуществления» (Патент RU №2478517 С2 МПК: В63С 7/00; B63G 8/00), взятое за аналог, предназначенное для осуществления подводных подъемно-транспортных операций, таких как доставка полезной нагрузки в заданную точку акватории в подводном положении и установка ее на дно, подъем на поверхность подводных объектов, в том числе промыслового оборудования, подъем со дна и перемещение подводных объектов подо льдом без всплытия на поверхность и т.д. Подводное судно состоит из двухкорпусной подводной лодки, в проницаемом корпусе которой расположены, грузовой отсек с грузоподъемными техническими средствами, опоры судна, для установки подводного судна на грунт при проведении подъемно-транспортной операции, также судно снабжено, балластной системой, подруливающими устройствами, системой фиксации и раскрепления перевозимого подводного объекта.
Недостатками известной конструкции являются:
- необходимость постановки подводного судна на грунт при проведении подводной подъемно-транспортной операции подводного объекта, что ограничивает диапазон глубин проведения подводной подъемно-транспортной операции диапазоном глубины плавания подводного судна;
- загрузка/разгрузка на/с подводного судна подводного объекта возможна только снизу, что требует необходимости оборудования специально обустроенной площадки для перегрузки подводных объектов на дне акватории, дополнительных технических средств, обеспечивающих транспортировку, снятие и установку подводных объектов на специально обустроенную площадку для перегрузки подводных объектов и обеспечение минимальной глубины для организации специально обустроенной площадки для перегрузки подводных объектов, для проведения операций загрузки/разгрузки подводных объектов на подводное судно.
Известна "Грузовая подводная лодка" (Патент GB №8605865 DO (GB №2172854 A, GB №2172854 В) МПК: В63В 3/13 25/00) взятая за аналог, предназначенная для выполнения подводных операций, в частности операций различного типа связанные с разработкой подводных нефтяных и газовых месторождений. Задачей данного изобретения является создание устройства для выполнения подводных операций, которое достаточно универсально, что позволяет отказаться от необходимости использования надводных судов.
В изобретении предлагается устройство для проведения операций под водой в виде подводной лодки, имеющей два независимых прочных корпуса, соединенных друг с другом спереди поперечным прочным корпусом. В задней части прочные корпуса соединены друг с другом с помощью подходящей связи, которая может быть реализована как прочным корпусом, так и легкими конструкциями. Два прочных корпуса окружены и соединены друг с другом единым внешним легким гидродинамическим корпусом, причем задняя соединительная часть может быть сформирована как цельная часть единого внешнего легкого гидродинамического корпуса. Два прочных корпуса, соединенные вместе образуют отсек, предназначенный для приема и перевозки одного или нескольких грузовых модулей, причем оба прочных корпуса снабжены устройством хранения груза. Грузовые модули могут иметь внешнюю форму повторяющую внешнюю форму подводной лодки, однако предпочтительно, чтобы пространство между двумя корпусами подводной лодки могло быть сформировано люками (верхним и нижним) или похожими устройствами, включенными в единый внешний легкий гидродинамический корпус подводной лодки, таким образом, форма подводной лодки может быть независима от внешней формы грузовых модулей.
Недостатками известной конструкции является:
отсутствие собственных грузоподъемных технических средств;
фиксированные габариты грузовых модулей, размер которых ограничен сверху и снизу верхними и нижними люками, спереди поперечным прочным корпусом, а сзади задней связью, включенные в единый внешний гидродинамический корпус подводной лодки;
возможность загрузки/разгрузки перевозимых грузовых модулей на/с подводной лодки только сверху.
Известна многоцелевая подводная лодка (Техническое решение было представлено на конференции по арктическим технологиям (Offshore Technology Conference), проходившей с 23 по 25 марта 2015 г. в Копенгагене, Дания. Данное техническое решение было выполнено совместно компаниями "ThyssenKrupp Marine Systems GmbH" и "Statoil ASA"), взятая за прототип, предназначенная для транспортировки, установки, снятия, осмотра, технического обслуживания и ремонта подводных сооружений, проведения подледных сейсмических исследований и ликвидации подледных разливов нефти.
Многоцелевая подводная лодка состоит из корпуса, состоящего из легкого корпуса и прочного корпуса, в котором расположены машинное отделение с энергетической установкой, помещения со вспомогательными системами и механизмами, жилые помещения и центр управления. В носовой части легкого корпуса перед прочным корпусом многоцелевой подводной лодки расположена зона для размещения малогабаритных грузов, представляющая собой проницаемый отсек, оборудованный грузоподъемными техническими средствами, люками, расположенными выше и ниже зоны для размещения малогабаритных грузов, которые могут быть использованы для загрузки и выгрузки малогабаритных грузов, при этом более крупногабаритные грузы должны быть закреплены для транспортировки снаружи легкого корпуса под днищем многоцелевой подводной лодки. Многоцелевая подводная лодка имеет балластную систему, предназначенную, в том числе, для компенсации плавучести при проведении грузоподъемных операций, подруливающие устройства, расположенные в носу и корме, предназначенные для динамического позиционирования и содержания, систему фиксации груза, систему контроля положения грузов и телеуправляемые подводные аппараты, размещенные в легком корпусе, предназначенные для осуществления контроля грузоподъемных операций.
Недостатками известной конструкции являются:
- возможность загрузки и разгрузки сверху только малогабаритных грузов;
- крупногабаритные грузы должны быть закреплены для транспортировки снаружи легкого корпуса под днищем многоцелевой подводной лодки, тем самым загрузка/разгрузка на многоцелевую подводную лодку крупногабаритных грузов возможна только снизу, что требует необходимости оборудования специально обустроенной площадки для перегрузки грузов на дне акватории, дополнительных технических средств, обеспечивающих транспортировку, снятие и установку крупногабаритных грузов на специально обустроенную площадку для перегрузки грузов и обеспечение минимальной глубины для организации специально обустроенной площадки для перегрузки грузов, для проведения операций загрузки/разгрузки крупногабаритных грузов на многоцелевую подводную лодку;
Задачей настоящего изобретения является:
- создание конструкции многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой, с возможности загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху и снизу, а также возможность проведения горизонтальной загрузки и разгрузки в надводном положении;
- возможность загрузки и разгрузки грузоподъемными техническими средствами береговых баз за счет возможности загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху;
- возможность загрузки и разгрузки судовыми грузоподъемными техническими средствами за счет возможности загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху;
- возможность проведения горизонтальной загрузки и разгрузки малогабаритных и крупногабаритных грузов с помощью технических средств береговых баз в надводном положении;
- отсутствие необходимости оборудования специально обустроенной площадки для перегрузки грузов на дне акватории за счет возможности загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху;
- отсутствие необходимости в наличии дополнительных технических средств, обеспечивающих транспортировку, установку и снятие грузов на специально обустроенную площадку для перегрузки грузов за счет возможности загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху;
- уменьшение стоимости грузоподъемных операций за счет уменьшения количества привлекаемых технических средств и отсутствия дополнительных сооружений, обеспечивающих операции загрузки/разгрузки;
- сокращение времени загрузки/разгрузки за счет отсутствия промежуточных операций по перегрузке грузов на дно акватории.
Поставленная задача достигается тем, что корпус многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой имеет в своем составе корпус состоящий из легкого корпуса и прочного корпуса, в котором расположены машинное отделение с энергетической установкой, помещения со вспомогательными системами и механизмами, жилые помещения и центр управления; балластную систему, зону для размещения грузов, грузоподъемные технические средства, систему фиксации грузов, систему контроля положения грузов в зоне для размещения грузов, подруливающие устройства, расположенные в носу и корме, телеуправляемые подводные аппараты, предназначенные для осуществления контроля грузоподъемных операций. Корпус многоцелевой подводной лодки выполнен из двух параллельно расположенных корпусов, состоящих из легких корпусов с расположенными внутри прочными корпусами, представляющих собой корпус катамаранного типа, связанных между собой поперечными жесткими связями, например, тремя, образующих открытую зону для размещения транспортируемого груза, выполненную с возможностью загрузки транспортируемых грузов сверху и снизу, а также с возможностью горизонтальной загрузки.
Сущность конструкции, заявляемой многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой поясняется чертежами, где:
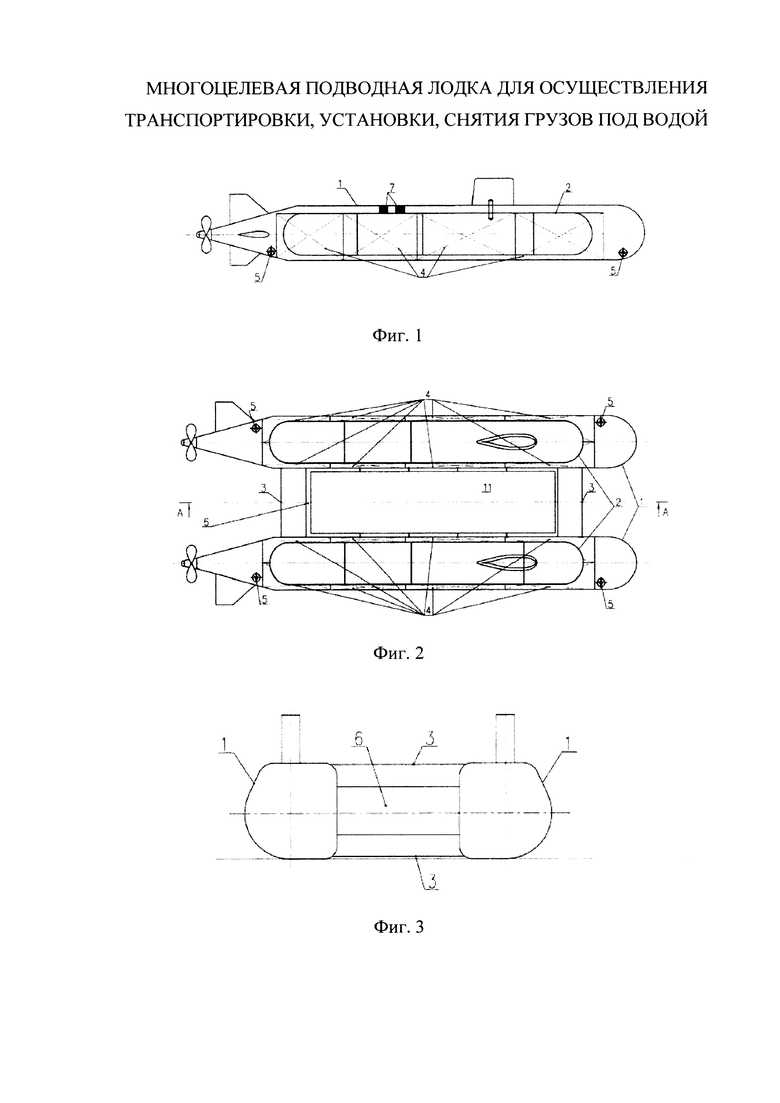
- на фиг. 1 изображен вид на правый борт многоцелевой подводной лодки со снятой обшивкой;
- на фиг. 2 изображен вид сверху на многоцелевую подводную лодку со снятой обшивкой и с установленным транспортируемым грузом в открытой зоне для расположения грузов;
- на фиг. 3 изображен вид спереди на многоцелевую подводную лодку;
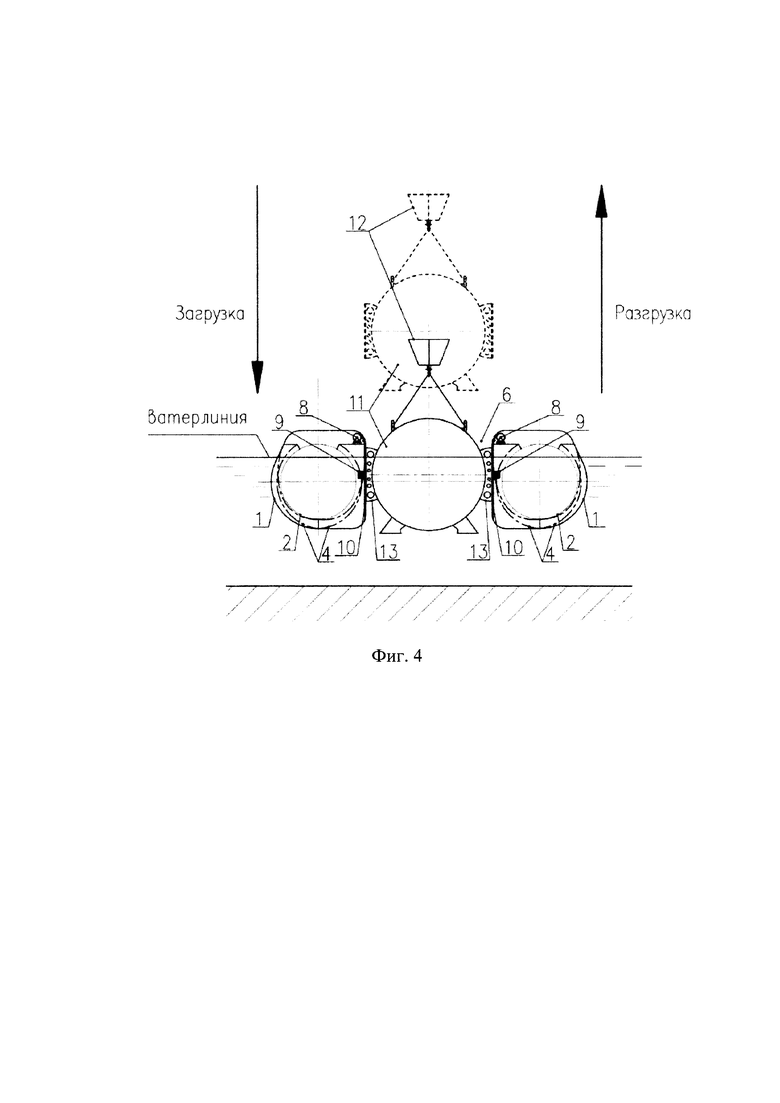
- на фиг. 4 показано поперечное сечение многоцелевой подводной лодки и схема загрузки/разгрузки транспортируемого груза в/из открытой зоны для расположения грузов;
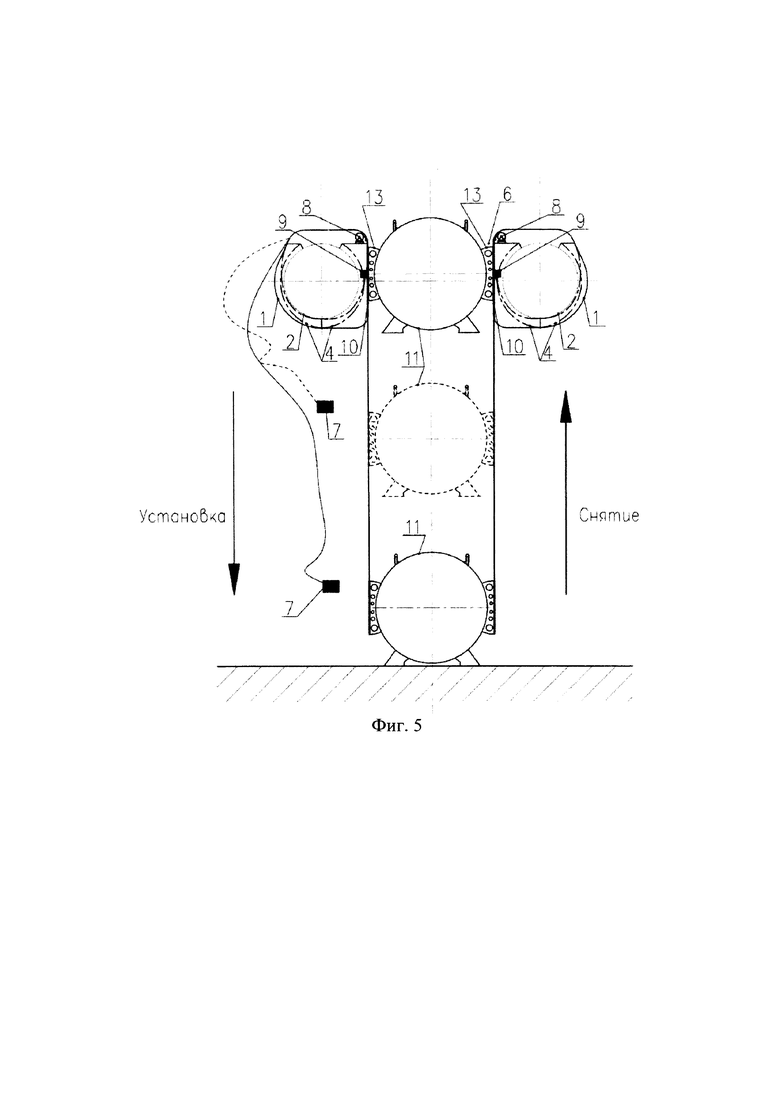
- на фиг. 5 показано поперечное сечение многоцелевой подводной лодки и схема установки/снятия транспортируемого груза на/с дна акватории;
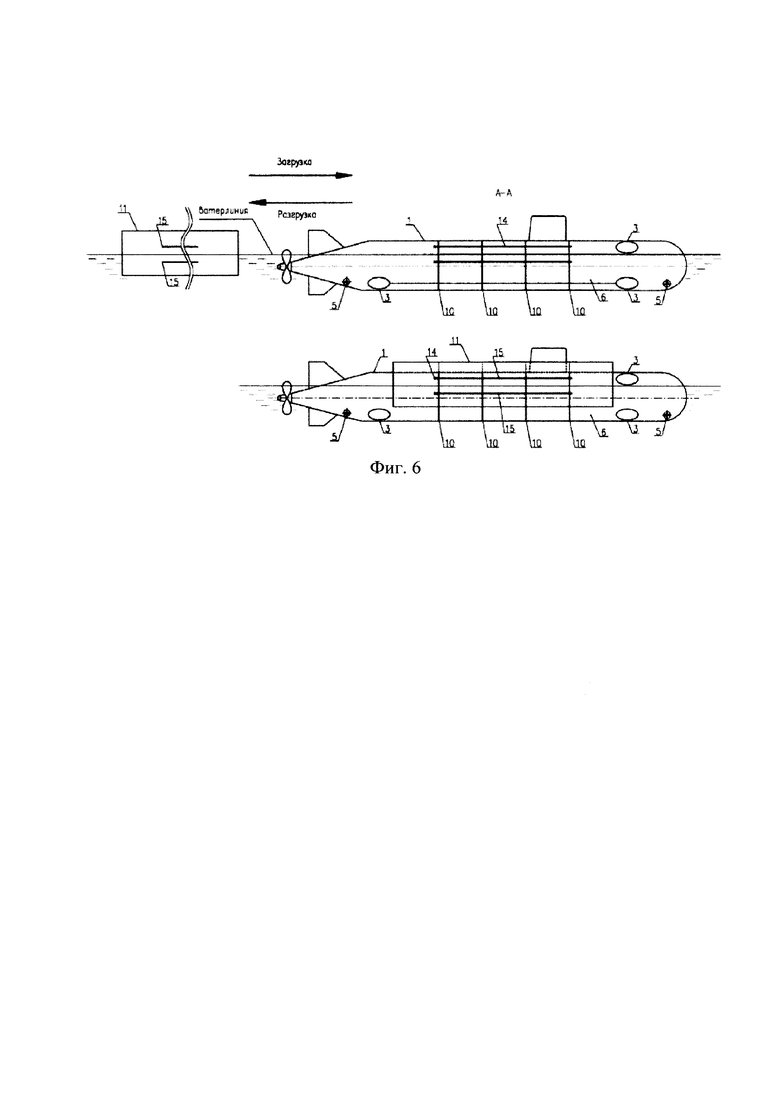
- на фиг. 6 показана схема горизонтальной загрузки и разгрузки транспортируемого груза в/из открытой зоны для расположения грузов.
Многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой (фиг. 1, 2 и 3) состоит из двух параллельно расположенных легких корпусов 1 с расположенными внутри прочными корпусами 2, связанных между собой поперечными жесткими связями 3, например, тремя, балластной системы 4, подруливающих устройств 5, расположенных в носу и корме каждого легкого корпуса 1. В прочном корпусе 2 расположены: машинное отделение с энергетической установкой, помещения со вспомогательными системами и механизмами, жилые помещения и центр управления (на чертеже не показано). В пространстве, образованном между двумя параллельно расположенными легкими корпусами 1 и поперечными жесткими связями 3 расположена открытая зона 6 для размещения транспортируемых грузов 11. В верхних частях легких корпусов 1, в пространстве между легкими корпусами 1 и прочными корпусами 2, установлены телеуправляемые подводные аппараты 7, предназначенные для осуществления контроля грузоподъемных операций, (фиг. 1). Внутри пространства между легкими корпусами 1 и прочными корпусами 2 граничащих с открытой зоной 6 для размещения транспортируемых грузов 11 размещены грузоподъемные технические средства 8, система фиксации 9 транспортируемых грузов 11 и ответные части направляющих 10 транспортируемых грузов 11, например, восемь (фиг. 4). Многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой оснащена системой контроля положения (на чертеже не показана) транспортируемых грузов 11 в открытой зоне 6 для размещения транспортируемых грузов 11, состоящей из датчиков и видеокамер, которые расположены по периметру открытой зоны 6 для размещения транспортируемых грузов 11 и передающей данные о положении транспортируемых грузов 11, направляющих 13 транспортируемых грузов 11 или направляющих с ответными частями для горизонтальной загрузки 14 транспортируемых грузов 11 на пост управления системы контроля положения (на чертеже не показано) транспортируемых грузов 11, входящий в состав центра управления (на чертеже не показано).
Транспортируемые грузы 11, грузоподъемные технические средства точки загрузки 12, направляющие 13 транспортируемых грузов 11, направляющие с ответными частями для горизонтальной загрузки 14 транспортируемых грузов 11, направляющие для горизонтальной загрузки 15 транспортируемых грузов 11 и технические средства точки горизонтальной загрузки (на чертеже не показано) в состав многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой, не входят.
Многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой работает следующим образом:
Загрузка транспортируемых грузов 11 на многоцелевую подводную лодку для осуществления транспортировки, установки, снятия грузов под водой в надводном положении.
В точке загрузки, например, пункте базирования или у судна снабжения, производят загрузку транспортируемых грузов 11 сверху в открытую зону 6 для размещения транспортируемых грузов 11 многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой, с помощью грузоподъемных технических средств точки загрузки 12 (фиг. 4). Транспортируемый груз 11 с помощью грузоподъемных технических средств точки загрузки 12 располагают над открытой зоной 6 для размещения транспортируемых грузов 11, выравнивают таким образом, чтоб направляющие 13 транспортируемых грузов 11 совпали с ответными частями направляющих 10 транспортируемых грузов 11. После этого начинают процесс загрузки транспортируемых грузов 11 в открытую зону 6 для размещения транспортируемых грузов 11 по ответным частям направляющих 10 транспортируемых грузов 11. При достижении транспортируемыми грузами 11 транспортного положения, их фиксируют с помощью системы фиксации 9 транспортируемых грузов 11. После этого производят отсоединение строп грузоподъемных технических средств точки загрузки 12 от транспортируемых грузов 11 и присоединяют стропы от грузоподъемных технических средств 8.
Транспортировка транспортируемых грузов 11 многоцелевой подводной лодкой для осуществления транспортировки, установки, снятия грузов под водой.
После размещения транспортируемых грузов 11 в открытой зоне 6 для размещения транспортируемых грузов 11, многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой уходит в направлении точки выгрузки. В начале перехода из точки загрузки до точки выгрузки многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой находится в надводном положении и при достижении района с достаточной глубиной для погружения переходит в подводное положение. Погружение осуществляется с помощью балластной системы 4.
Установка транспортируемых грузов 11 на дно акватории в подводном положении.
В точке выгрузки, например, в точке эксплуатации, многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой с транспортируемыми грузами 11 позиционируется над точкой выгрузки с помощью подруливающих устройств 5 и зависает над точкой выгрузки. Из многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой выпускают телеуправляемые подводные аппараты 7 для проведения осмотра места установки и дальнейшего сопровождения проведения операции установки транспортируемых грузов 11 на дно акватории (фиг. 5). После осмотра места установки с помощью телеуправляемых подводных аппаратов 7, система фиксации 9 транспортируемых грузов 11 отпускает транспортируемые грузы 11. С помощью грузоподъемных технических средств 8 транспортируемые грузы 11 начинают опускать по ответным частям направляющих 10 транспортируемых грузов 11. После выхода направляющих 13 транспортируемых грузов 11 из ответных частей - направляющих 10 транспортируемых грузов 11, телеуправляемые подводные аппараты 7 производят контроль за спуском транспортируемых грузов 11. При достижении транспортируемыми грузами 11 места установки на дне акватории телеуправляемые подводные аппараты 7 осматривают транспортируемые грузы 11 и отсоединяют стропы грузоподъемных технических средств 8. Далее стропы грузоподъемных технических средств 8 выбираются и телеуправляемые подводные аппараты 7 возвращаются на многоцелевую подводную лодку для осуществления транспортировки, установки, снятия грузов под водой. Многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой уходит за следующими транспортируемыми грузами 11.
Снятие транспортируемых грузов 11 со дна акватории в подводном положении.
Снятие транспортируемых грузов 11 со дна акватории и установка в открытую зону 6 для размещения транспортируемых грузов 11 многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой производится после позиционирования многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой над транспортируемыми грузами 11. Процесс поднятия транспортируемых грузов 11 производится в обратном порядке установки транспортируемых грузов 11 на дно акватории в точке выгрузки.
Разгрузка транспортируемых грузов 11 с многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой в надводном положении.
В точке разгрузки, разгрузка транспортируемых грузов 11 с многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой из открытой зоны 6 для размещения транспортируемых грузов 11 (фиг. 4) производится в обратном порядке загрузки транспортируемых грузов 11 в открытую зону 6 для размещения транспортируемых грузов 11 в точке загрузки.
Конструктивными особенности многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой, позволяют производить горизонтальную загрузку и разгрузку транспортируемых грузов 11 в открытую зону 6 для размещения транспортируемых грузов 11 в надводном положении.
Горизонтальная загрузка транспортируемых грузов 11 с многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой в надводном положении.
В точке загрузки, например, пункте базирования, производят горизонтальную загрузку транспортируемых грузов 11 в открытую зону 6 для размещения транспортируемых грузов 11 многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой, с помощью технических средств точки загрузки, например, буксир (на чертеже не показано) (фиг. 6).
Способы обеспечения плавучести груза и технические средства точки загрузки не входят в состав данного изобретения.
На многоцелевую подводную лодку для осуществления транспортировки, установки, снятия грузов под водой для обеспечения проведения горизонтальной загрузки транспортируемых грузов 11 в ответные части направляющих 10 транспортируемых грузов 11 с помощью грузоподъемных технических средств точки загрузки 12 устанавливаются направляющие с ответными частями для горизонтальной загрузки 14 транспортируемых грузов 11 и присоединяют стропы от грузоподъемных технических средств 8. Транспортируемые грузы 11 с помощью технических средств точки загрузки (на чертеже не показано) располагают напротив открытой зоны 6 для размещения транспортируемых грузов 11 в кормовой части многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой. Транспортируемые грузы 11 выравнивают таким образом, чтоб направляющие для горизонтальной загрузки 15 транспортируемых грузов 11 совпали с направляющими с ответными частями для горизонтальной загрузки 14 транспортируемых грузов 11. После этого начинают процесс загрузки транспортируемых грузов 11 в открытую зону 6 для размещения транспортируемых грузов 11 по направляющим с ответными частями для горизонтальной загрузки 14 транспортируемых грузов 11 с помощью технических средств точки загрузки (на чертеже не показано). При достижении транспортируемыми грузами 11 транспортного положения, их фиксируют. После загрузки транспортируемых грузов 11 технические средства точки загрузки (на чертеже не показано) отстыковываются и отходят от транспортируемых грузов 11.
Горизонтальная разгрузка транспортируемых грузов 11 с многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой в надводном положении.
В точке разгрузки, разгрузка транспортируемых грузов 11 с многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой из открытой зоны 6 для размещения транспортируемых грузов 11 (фиг. 6) производится в обратном порядке горизонтальной загрузки транспортируемых грузов 11 в открытую зону 6 для размещения транспортируемых грузов 11 в точке загрузки.
Система контроля за положением груза контролирует ход проведения операций загрузки/разгрузки транспортируемых грузов 11 в точке загрузки и установки/снятия транспортируемых грузов 11 в точке выгрузки, а также положение транспортируемых грузов 11 при транспортировке.
Балластная система 4 при проведении операций загрузки/разгрузки в точке загрузки компенсирует вес принимаемых транспортируемых грузов 11, сохраняя осадку многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой.
При проведении операции транспортировки транспортируемых грузов 11, в надводном и подводном положениях, а также при переходе из надводного положения в подводное положение, и обратно балластная система 4 работает в штатном режиме.
При проведении операций установки и снятия транспортируемых грузов 11 в точке выгрузки, балластная система 4 отслеживает изменение плавучести многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой и приводит к уравновешенному состоянию статического равновесия близкому к нулевой (нейтральной) плавучести.
Предложенная конструкция многоцелевой подводной лодки для осуществления транспортировки, установки, снятия грузов под водой позволит достичь:
- транспортировку, установку, снятия грузов под водой, с возможностью загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху и снизу, а также возможность проведения горизонтальной загрузки и разгрузки в надводном положении;
- возможность загрузки/разгрузки грузоподъемными техническими средствами береговых баз за счет возможностью загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху;
- возможность загрузки/разгрузки судовыми грузоподъемными техническими средствами за счет возможностью загрузки и разгрузки малогабаритных и крупногабаритных грузов сверху;
- возможность проведения горизонтальной загрузки и разгрузки малогабаритных и крупногабаритных грузов с помощью технических средств береговых баз в надводном положении;
- обеспечение операций загрузки/разгрузки без оборудования специально обустроенной площадки для перегрузки грузов на дно акватории;
- обеспечение операций загрузки/разгрузки без привлечения дополнительных технических средств, обеспечивающих транспортировку, установку и снятие грузов на специально обустроенную площадку для перегрузки грузов;
- уменьшение стоимости грузоподъемных операций за счет уменьшения количества привлекаемых технических средств и отсутствия дополнительных сооружений, обеспечивающих операции загрузки/разгрузки;
- сокращение времени загрузки/разгрузки за счет отсутствия промежуточных операций по перегрузке грузов на дно акватории.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2462388C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ НЕГАБАРИТНЫХ ПОДВОДНЫХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500569C2 |
| НАДВОДНАЯ ПЛАТФОРМА ДЛЯ ПОДНЯТИЯ И ОБРАБОТКИ ГРУЗОВ СО ДНА АКВАТОРИИ, В ТОМ ЧИСЛЕ ОПАСНЫХ | 2012 |
|
RU2521070C2 |
| СПОСОБ ДОБЫЧИ И ТРАНСПОРТИРОВКИ ГАЗОВЫХ ГИДРАТОВ ДОННЫХ ОТЛОЖЕНИЙ И ПОДВОДНАЯ ЛОДКА ДЛЯ ДОБЫЧИ И ТРАНСПОРТИРОВКИ ГАЗОВЫХ ГИДРАТОВ | 2014 |
|
RU2554374C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2005 |
|
RU2359861C2 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ В ЛЕДОВЫХ УСЛОВИЯХ | 2013 |
|
RU2544045C1 |
| АВИАДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2782037C1 |
| МОРСКОЙ АВТОНОМНЫЙ КОМПЛЕКС (МАК) | 2003 |
|
RU2268840C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| Устройство типа "Купол" для ликвидации подводных разливов нефти в комплекте с технологическим оборудованием | 2019 |
|
RU2723799C1 |
Изобретение относится к области судостроения и касается вопросов создания средств для осуществления транспортировки, установки, снятия грузов под водой, а также для осмотра, технического обслуживания, ремонта подводных сооружений. Предложена многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой, имеющая в своем составе корпус из двух параллельно расположенных легких корпусов с расположенными внутри прочными корпусами, связанных между собой поперечными жесткими связями с образованием открытой зоны для размещения транспортируемого груза, в прочном корпусе расположены машинное отделение с энергетической установкой, помещения с вспомогательными системами и механизмами, жилые помещения и центр управления, а также имеющая балластную систему, грузоподъемные технические средства, систему фиксации грузов, систему контроля положения грузов в зоне для размещения грузов, подруливающие устройства, расположенные в носу и корме, телеуправляемые подводные аппараты. Предложенная конструкция лодки обеспечивает возможность загрузки транспортируемых грузов сверху и снизу, а также горизонтальную загрузку. Технический результат заключается в расширении функциональных возможностей и улучшении эксплуатационных характеристик подводной лодки. 6 ил.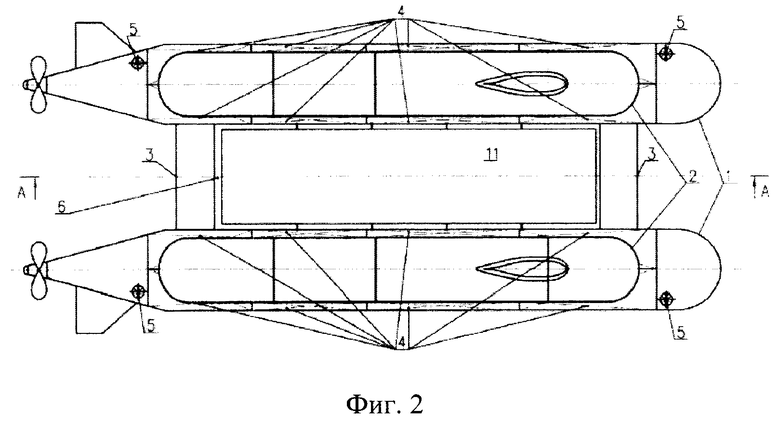
Многоцелевая подводная лодка для осуществления транспортировки, установки, снятия грузов под водой, имеющая в своем составе корпус, состоящий из легкого корпуса и прочного корпуса, в котором расположены машинное отделение с энергетической установкой, помещения со вспомогательными системами и механизмами, жилые помещения и центр управления, а также имеющая балластную систему, зону для размещения грузов, грузоподъемные технические средства, систему фиксации грузов, систему контроля положения грузов в зоне для размещения грузов, подруливающие устройства, расположенные в носу и корме, телеуправляемые подводные аппараты, предназначенные для осуществления контроля грузоподъемных операций, отличающаяся тем, что корпус многоцелевой подводной лодки выполнен из двух параллельно расположенных корпусов, состоящих из легких корпусов с расположенными внутри прочными корпусами, представляющих собой корпус катамаранного типа, связанных между собой поперечными жесткими связями, например тремя, образующих открытую зону для размещения транспортируемого груза, выполненную с возможностью загрузки транспортируемых грузов сверху и снизу, а также с возможностью горизонтальной загрузки.
| СПОСОБ ОХЛАЖДЕНИЯ СЖАТОГО ВОЗДУХА ИЛИ ГАЗА И КОМПРЕССОРНАЯ УСТАНОВКА | 1999 |
|
RU2172854C2 |
| US 3677212 A, 18.07.1972 | |||
| СПОСОБ ПОРЯДНОГО ВЗЯТИЯ ПАКЕТНЫХ УПАКОВОК | 2000 |
|
RU2244667C2 |
| Подушка пресса для влажно-тепловой обработки швейных изделий | 1974 |
|
SU598988A1 |
| Привод вариометра | 2023 |
|
RU2812758C1 |
| Способ определения коэффициента теплопроводности твердых тел | 1983 |
|
SU1168840A1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ ОПЕРАЦИИ И ПОДВОДНОЕ СУДНО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478517C2 |

