Область техники
[0001] Настоящее раскрытие относится к способу диагностирования неисправности и системе диагностирования неисправности. В частности, настоящее раскрытие относится к способу диагностирования неисправности и системе диагностирования неисправности, подходящей для обнаружения неисправности в неустойчивом состоянии, которое изменяется динамически.
Уровень техники
[0002] В области различных установок, таких как газотурбинная силовая установка, ядерная силовая установка, теплосиловая установка, и в области двигателя внутреннего сгорания, такого как реактивный двигатель, диагностирование неисправности установки или двигателя выполняется посредством наблюдения за их рабочим состоянием (включающим в себя пробную работу) для реализации стабильной работы и выходной мощности.
[0003] Например, в патентной литературе 1 раскрыта система наблюдения, в которой может быть автоматизирована серия из процессов от наблюдения за указанием неисправности объекта наблюдения до устранения неисправности. Эта система наблюдения включает в себя блок наблюдения, который получает предопределенные данные объекта наблюдения из объекта наблюдения, вычисляет их расстояние Махаланобиса и обнаруживает неисправность в объекте наблюдения, блок обработки данных, который генерирует предопределенный входной сигнал, посредством извлечения неисправного сигнала, указывающего на указание о неисправности, и связанного сигнала, который связан с данными объекта наблюдения, и блок диагностирования сбоев в работе, который выполняет устранение неисправности в отношении объекта наблюдения на основе входного сигнала.
[0004] Патентная литература 2 раскрывает устройство диагностирования неисправности, которое диагностирует неисправность установки посредством сравнения значений множества переменных, вновь вводимых из установки, с предопределенным пространством единиц. Это устройство диагностирования неисправности включает в себя блок хранения накопленных данных, который хранит в себе накопленные данные, включающие в себя значение каждой из переменных, введенных в прошлом, блок принятия решения, который для каждой из переменных извлекает максимальное значение и минимальное значение в пределах предопределенного периода накопленных данных и назначает центральное значение из них в качестве срединного значения, первый блок вычисления, который вычисляет разность между значением, вновь введенным для каждой из переменных, и срединным значением, второй блок вычисления, который вычисляет расстояние Махаланобиса посредством использования вычисленной разности для каждой из переменных и данных предопределенного пространства единиц, и блок определения, который диагностирует неисправность посредством определения, находится ли расстояние Махаланобиса в пределах порогового диапазона, установленного заранее.
Список библиографических ссылок
Патентная литература
[0005] Патентная литература 1: выложенная заявка на патент Японии № 2011-090382
Патентная литература 2: выложенная заявка на патент Японии № 2014-035282
Сущность изобретения
Техническая проблема
[0006] Объект наблюдения, такой как установка или двигатель внутреннего сгорания, в общем, имеет устойчивое состояние, которое является стабильным рабочим состоянием, и неустойчивое состояние, которое является переходным нестабильным рабочим состоянием до того, как объект наблюдения достигает устойчивого состояния. В неустойчивом состоянии один и тот же объект наблюдения ведет себя по-разному в зависимости от окружающих условий, рабочих условий и подобного в данный момент времени, и почти никогда не показывает одинаковых динамических изменений.
[0007] В системе наблюдения, раскрытой в патентной литературе 1, посредством вычисления расстояния Махаланобиса данных объекта наблюдения, входной сигнал, используемый при устранении неисправности, генерируется из неисправного сигнала, указывающего на указание о неисправности, и связанного сигнала. Однако чтобы определить, имеется ли неисправность или указание о неисправности после вычисления расстояния Махаланобиса данных объекта наблюдения, необходимо заранее подготовить справочные данные. В случае устойчивого состояния, поскольку рабочее состояние и состояние вывода являются стабильными, можно подготовить справочные данные. Однако, в случае неустойчивого состояния, которое изменяется динамически, справочные данные не могут быть сгенерированы только из данных объекта наблюдения, так что диагностирование неисправности не может быть выполнено.
[0008] Также в устройстве диагностирования неисправности, раскрытом в патентной литературе 2, поскольку расстояние Махаланобиса вычисляется посредством использования накопленных данных из прошлого, подобно патентной литературе 1, хотя диагностирование неисправности может быть выполнено для устойчивого состояния посредством сравнения их с прошлыми данными, диагностирование неисправности не может быть выполнено для неустойчивого состояния.
[0009] Это раскрытие было сделано ввиду вышеприведенного обсуждения. Одной из целей настоящего раскрытия является обеспечение способа диагностирования неисправности и системы диагностирования неисправности, которая может выполнять диагностирование неисправности не только в устойчивом состоянии объекта наблюдения, но также и в неустойчивом состоянии.
Решение проблемы
[0010] Первый аспект настоящего раскрытия представляет собой способ диагностирования неисправности, в котором диагностируют неисправность объекта наблюдения, имеющего рабочее состояние, которое включает в себя неустойчивое состояние, причем способ включает в себя: этап генерирования модели, на котором генерируют имитационную модель объекта наблюдения; этап измерения, на котором измеряют величину внутреннего состояния в рабочем состоянии объекта наблюдения и извлекают измеренное значение; этап предсказания, на котором вводят в имитационную модель аналогичное входное значение управления, используемое в рабочем состоянии объекта наблюдения, и вычисляют предсказанное значение величины внутреннего состояния объекта наблюдения; этап вычисления расстояния Махаланобиса, на котором вычисляют расстояние Махаланобиса из разности между измеренным значением и предсказанным значением; и этап диагностирования неисправности, на котором диагностируют на основе расстояния Махаланобиса, является ли рабочее состояние объекта наблюдения неисправным.
[0011] Этап вычисления расстояния Махаланобиса может включать в себя вычисление вектора ошибки, который включает в себя разность и целочисленное значение разности в качестве его компонентов. Более того, этап предсказания может включать в себя вычисление предсказанного значения на основе измеренного значения, которое было измерено непосредственно ранее во временном ряде.
[0012] Второй аспект настоящего раскрытия представляет собой систему диагностирования неисправности для диагностирования неисправности объекта наблюдения, имеющего рабочее состояние, которое включает в себя неустойчивое состояние, причем система включает в себя: имитационную модель, сконфигурированную с возможностью имитирования объекта наблюдения; блок измерения, сконфигурированный с возможностью измерения величины внутреннего состояния в рабочем состоянии объекта наблюдения; устройство диагностирования, сконфигурированное с возможностью вычисления расстояния Махаланобиса из разности между предсказанным значением, вычисленным имитационной моделью, и измеренным значением, извлеченным блоком измерения, и диагностирования на основе расстояния Махаланобиса, является ли рабочее состояние объекта наблюдения неисправным; и блок управления, сконфигурированный с возможностью передачи аналогичного входного значения управления по меньшей мере объекту наблюдения и имитационной модели.
[0013] Устройство диагностирования может вычислять расстояние Махаланобиса на основе вектора ошибки, который включает в себя разность и целочисленное значение разности в качестве его компонентов. Более того, имитационная модель может вычислять предсказанное значение на основе измеренного значения, которое было измерено непосредственно ранее во временном ряде. Объект наблюдения представляет собой, например, двигатель для повторно используемого космического аппарата.
Полезные эффекты изобретения
[0014] В способе диагностирования неисправности и в системе диагностирования неисправности согласно настоящему раскрытию генерируется имитационная модель, которая имитирует внутреннее состояние объекта наблюдения, и, является ли объект наблюдения неисправным, диагностируется посредством использования разности между измеренным значением, полученным из объекта наблюдения, и предсказанным значением, вычисленным имитационной моделью. Соответственно, предсказанное значение, которое соответствует окружающим условиям и/или рабочим условиям в момент времени, когда осуществляется диагностирование неисправности, может быть вычислено имитационной моделью, и, поскольку была использована разность, измеренное значение, полученное из объекта наблюдения, может быть заменено значением изменения нормального значения. Соответственно, даже если рабочее состояние объекта наблюдения является неустойчивым состоянием, может быть проведено его динамическое изменение и может быть предпринято действие, и диагностирование неисправности объекта наблюдения может быть выполнено не только в устойчивом состоянии, а также в неустойчивом состоянии. Более того, посредством использования расстояния Махаланобиса в диагностировании неисправности, диагностирование неисправности может быть осуществлено просто и быстро.
Краткое описание чертежей
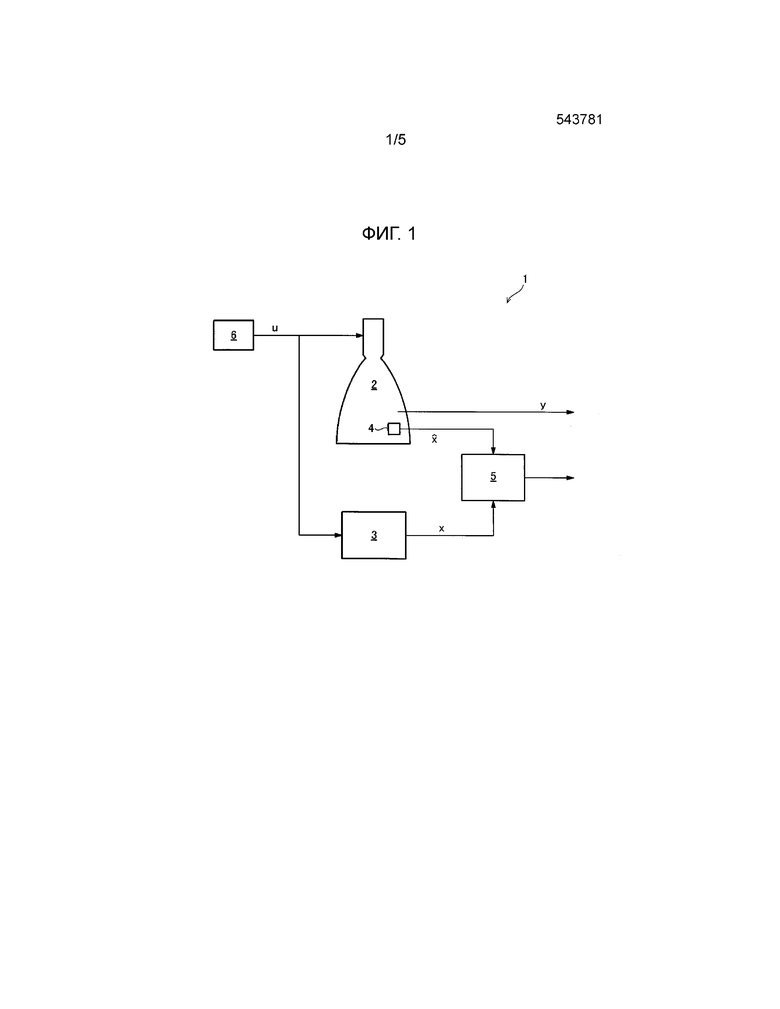
[0015] [ФИГ. 1] ФИГ. 1 представляет собой общее структурное схематическое представление системы диагностирования неисправности согласно настоящему раскрытию.
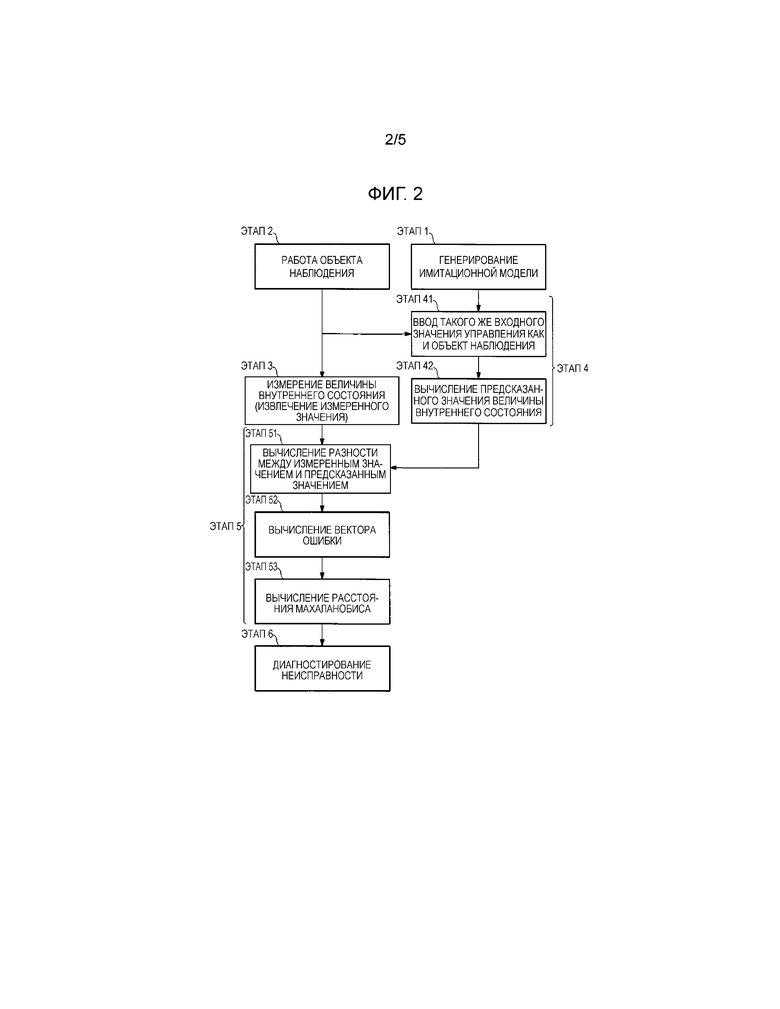
[ФИГ. 2] ФИГ. 2 представляет собой блок-схему последовательности операций способа диагностирования неисправности согласно настоящему раскрытию.
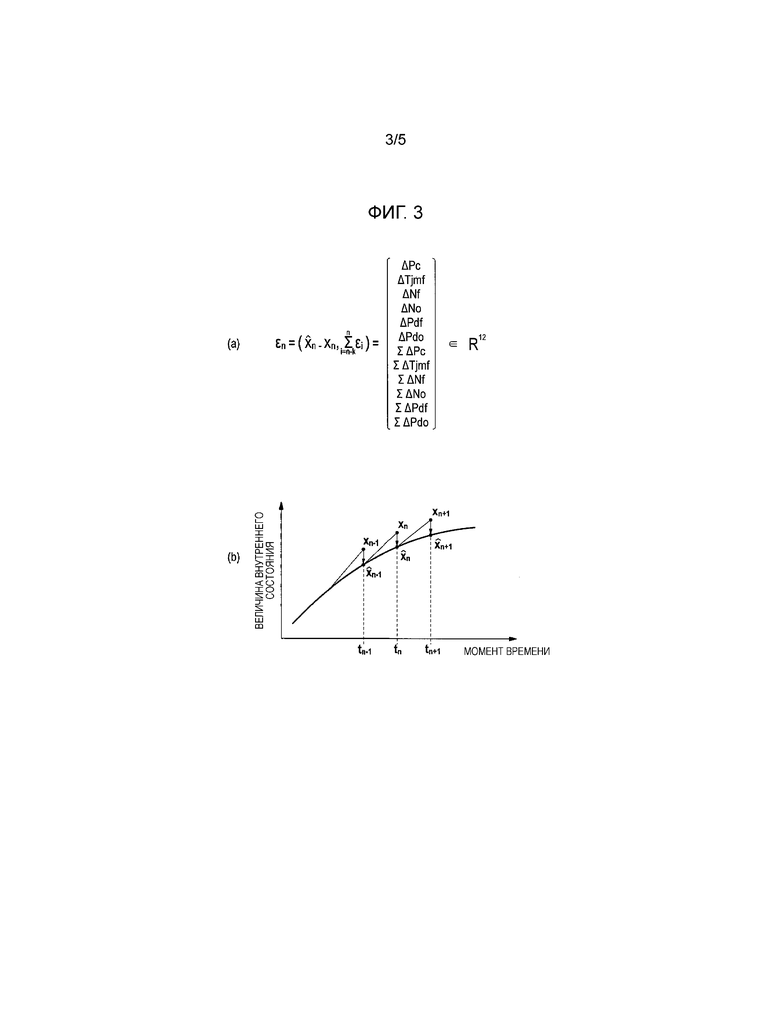
[ФИГ. 3] ФИГ. 3(a) и 3(b) представляют собой чертежи для объяснения этапа вычисления расстояния Махаланобиса, где ФИГ. 3(a) показывает вектор ошибки и ФИГ. 3(b) показывает пример способа вычисления предсказанного значения.
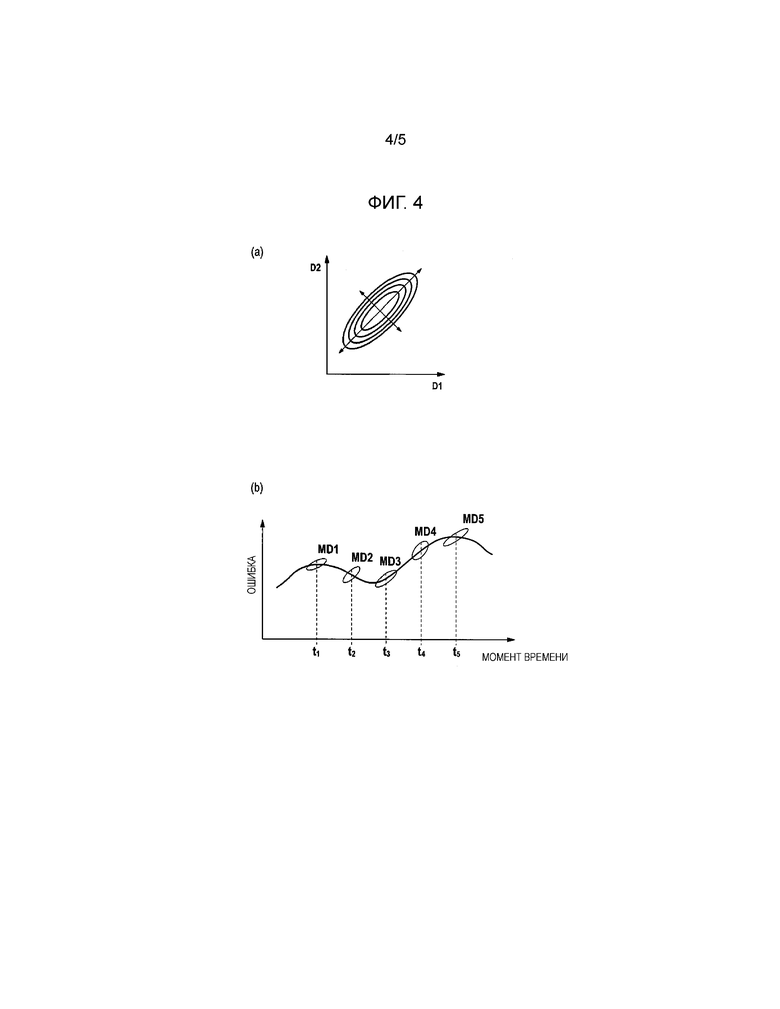
[ФИГ. 4] ФИГ. 4(a) и 4(b) представляют собой чертежи для объяснения этапа диагностирования неисправности, где ФИГ. 4(a) представляет собой концептуальное представление расстояния Махаланобиса и ФИГ. 4(b) представляет собой концептуальное представление диагностирования неисправности.
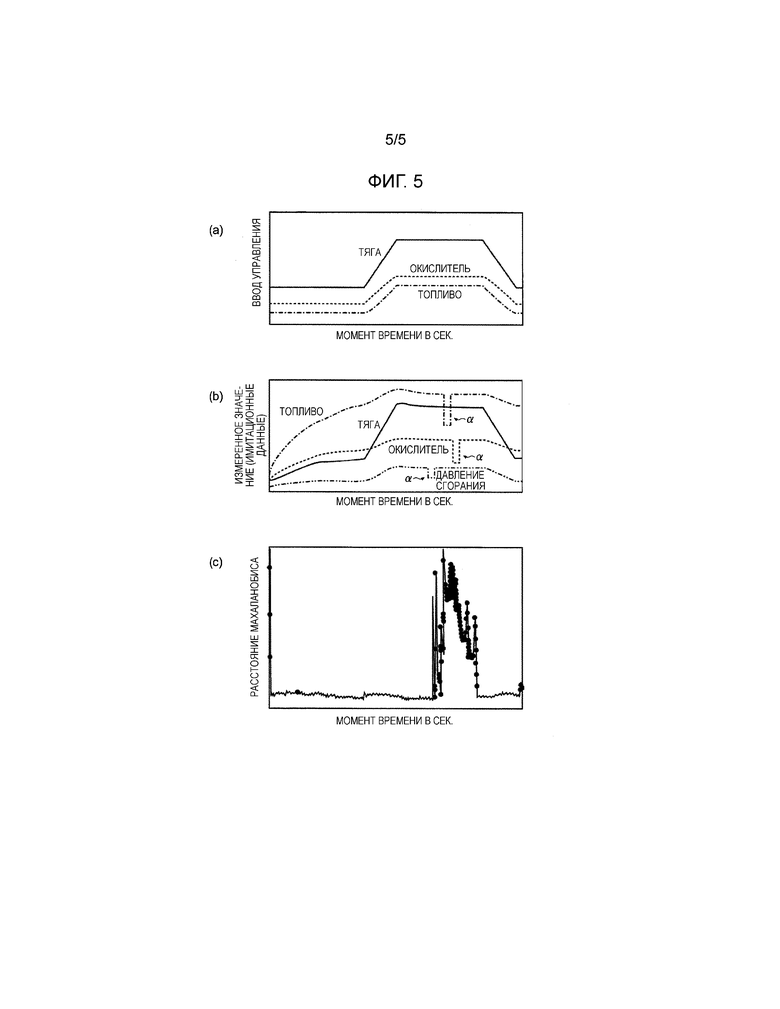
[ФИГ. 5] ФИГ. 5(a)-5(c) представляют собой объяснительные чертежи для проверки эффективности, когда настоящее раскрытие применяется к двигателю для повторно используемого космического аппарата, где результат диагностирования неисправности, основанный на входном значении управления, показан на ФИГ. 5(a), то же самое, основанное на имитированных данных измеренного значения, показано на ФИГ. 5(b), и то же самое, основанное на расстоянии Махаланобиса, показано на ФИГ. 5(c).
Описание вариантов осуществления
[0016] Примерные варианты осуществления согласно настоящему раскрытию поясняются ниже по тексту посредством использования прилагаемых чертежей. ФИГ. 1 представляет собой общее структурное схематическое представление системы диагностирования неисправности согласно настоящему раскрытию. ФИГ. 2 представляет собой блок-схему последовательности операций способа диагностирования неисправности согласно настоящему раскрытию. ФИГ. 3(a) и 3(b) представляют собой чертежи для объяснения этапа вычисления расстояния Махаланобиса, где ФИГ. 3(a) показывает вектор ошибки и ФИГ. 3(b) показывает пример способа вычисления предсказанного значения. ФИГ. 4(a) и 4(b) представляют собой чертежи для объяснения этапа диагностирования неисправности, где ФИГ. 4(a) представляет собой концептуальное представление расстояния Махаланобиса и ФИГ. 4(b) представляет собой концептуальное представление диагностирования неисправности.
[0017] Система 1 диагностирования неисправности согласно одному варианту осуществления настоящего раскрытия представляет собой, как показано на ФИГ. 1, систему диагностирования неисправности для диагностирования объекта 2 наблюдения, имеющего рабочее состояние, которое включает в себя неустойчивое состояние. Система 1 диагностирования неисправности включает в себя имитационную модель 3, которая имитирует объект 2 наблюдения, блок 4 измерения, который измеряет предопределенную величину внутреннего состояния в рабочем состоянии объекта 2 наблюдения, устройство 5 диагностирования, которое вычисляет расстояние Махаланобиса MD из разности (x^-x) между предсказанным значением x, вычисленным имитационной моделью 3, и измеренным значением x^ (^ (циркумфлексом или "шляпкой") на x. То же самое сохраняется в приведенном ниже по тексту объяснении.) извлеченное из блока 4 измерения, и которое диагностирует на основе расстояния Махаланобиса MD, является ли рабочее состояние объекта 2 наблюдения неисправным, и блок 6 управления, который передает аналогичное входное значение u управления и объекту 2 наблюдения, и имитационной модели 3.
[0018] Объект 2 наблюдения представляет собой, например, двигатель для повторно используемого космического аппарата. Однако объект 2 наблюдения не ограничивается двигателем для повторно используемого космического аппарата и может быть каким-либо другим двигателем внутреннего сгорания, таким как реактивный двигатель, различными установками, такими как газотурбинная силовая установка, ядерная силовая установка, теплосиловая установка, химическая установка и тому подобное. В частности, желательно, чтобы объект 2 наблюдения имел устойчивое состояние, которое является стабильным рабочим состоянием, и неустойчивое состояние, которое является переходным нестабильным рабочим состоянием до достижения устойчивого состояния.
[0019] Имитационная модель 3 представляет собой модель, которая позволяет оценивать величину внутреннего состояния объекта 2 наблюдения. Имитационная модель 3 генерируется, например, посредством применения методики численного моделирования. При генерировании имитационной модели выражение рекуррентного соотношения (ARMA) может быть использовано с учетом процесса реального времени. Когда объект 2 наблюдения является, например, двигателем для повторно используемого космического аппарата, в качестве величины внутреннего состояния могут быть выбраны, например, давление сгорания Pc, выходная температура регенеративного охлаждения Tjmf, частота вращения топливного насоса Nf, частота вращения насоса окислителя No, выходное давление топливного насоса Pdf, выходное давление насоса окислителя Pdo и подобное. Соответственно генерируется имитационная модель, которая позволяет вычислять эти величины внутреннего состояния. Имитационная модель 3 может быть одной имитационной моделью, которая имитирует весь объект 2 наблюдения, или может быть образована множеством имитационных моделей, каждая из которых вычисляет различную величину внутреннего состояния.
[0020] Блок 4 измерения установлен в объекте 2 наблюдения. Блок 4 измерения является, например, датчиком, который измеряет одну или более из величин внутреннего состояния, таких как давление сгорания Pc, выходная температура регенеративного охлаждения Tjmf, частота вращения топливного насоса Nf, частота вращения насоса окислителя No, выходное давление топливного насоса Pdf, выходное давление насоса окислителя Pdo. Блок 4 измерения является, например, манометром, термометром, вращающимся датчиком и подобным. Однако блок 4 измерения не ограничивается этими устройствами и может быть выбран соответствующим образом на основе типа объекта 2 наблюдения и/или измеряемой величины внутреннего состояния.
[0021] Блок 6 управления является устройством, которое передает объекту 2 наблюдения входное значение u управления, необходимое для оперирования объектом 2 наблюдения. Рабочее состояние объекта 2 наблюдения может быть фактической работой или может быть пробной работой. Более того, блок 6 управления также передает имитационной модели 3 входное значение u управления, необходимое для оперирования объектом 2 наблюдения. Имитационная модель 3 вычисляет величину внутреннего состояния на основе этого входного значения u управления, а также вычисляет предсказанное значение x для каждой из величин внутреннего состояния. Допустимо измерять выходное значение y объекта 2 наблюдения, который оперируется посредством использования входного значения u управления, и извлекать наружу выходное значение y.
[0022] Устройство 5 диагностирования является устройством, которое принимает данные измеренного значения х^, измеренного блоком 4 измерения, и данные предсказанного значения х, вычисленного имитационной моделью 3, и выполняет диагностирование неисправности объекта 2 наблюдения посредством использования принятых данных. Устройство 5 диагностирования выполняет процесс на основе, например, блок-схемы последовательности операций, показанной на ФИГ. 2. Результат диагностирования и данные диагностирования могут выводиться наружу из устройства 5 диагностирования различными способами, такими как отображение на мониторе, печатание на бумаге, вывод в форме данных.
[0023] Как показано на ФИГ. 2, блок-схема последовательности операций имеет следующие этапы: этап генерирования модели (этап 1), на котором генерируют имитационную модель 3 объекта 2 наблюдения, этап начала работы (этап 2), на котором начинают работу объекта 2 наблюдения, этап измерения (этап 3), на котором измеряют величину внутреннего состояния в рабочем состоянии объекта 2 наблюдения и извлекают измеренное значение x^, этап предсказания (этап 4), на котором вводят в имитационную модель 3 аналогичное входное значение u управления, используемое в рабочем состоянии объекта 2 наблюдения, и вычисляют предсказанное значение x величины внутреннего состояния объекта 2 наблюдения, этап вычисления расстояния Махаланобиса (этап 5), на котором вычисляют расстояние Махаланобиса MD из разности (x^-x) между измеренным значением x^ и предсказанным значением x, и этап диагностирования неисправности (этап 6), на котором диагностируют на основе расстояния Махаланобиса MD, является ли рабочее состояние объекта 2 наблюдения неисправным.
[0024] Устройство 5 диагностирования выполняет этап вычисления расстояния Махаланобиса (этап 5) и этап диагностирования неисправности (этап 6). В способе диагностирования неисправности согласно настоящему варианту осуществления, независимо от того, являются ли полученные данные (измеренное значение x^) неисправными, диагностируется на основе анализа с переменными параметрами, который использует расстояние Махаланобиса. Корреляция между множеством переменных может быть обработана за один раз посредством использования расстояния Махаланобиса. То есть, поскольку нет необходимости отдельно выполнять диагностирование на переменную, чтобы решить, является ли переменная неисправной, диагностирование неисправности может быть сделано просто и быстро.
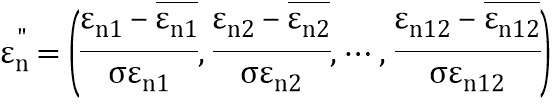
[0025] Этап вычисления расстояния Махаланобиса (этап 5), как показано на ФИГ. 2, может включать в себя этап вычисления разности (этап 51), на котором вычисляют разность (x^-x) между измеренным значением x^ и предсказанным значением x, этап вычисления вектора ошибки (этап 52), на котором вычисляют вектор ε ошибки, имеющий разность (x^-x) и целочисленное значение Σε ошибки в качестве его компонентов, а также этап расчета расстояния Махаланобиса (этап 53), на котором вычисляют расстояние Махаланобиса MD на основе вектора ε ошибки.
[0026] Вектор ε ошибки может быть выражен способом, показанным на ФИГ. 3(а). Когда вектор ошибки, который изменяется со временем, вычисляется непрерывно, целочисленное значение Σε, которое составляет компонент вектора ε ошибки, может быть вычислено как так называемое целочисленное значение. Чтобы вычислить вектор ε ошибки за определенный период времени (интервал), целочисленное значение Σε может быть вычислено как общая сумма разности (x^-x). Таким образом, чувствительность к оценке накопленных ошибок в одном и том же направлении может быть предотвращена от ослабления посредством использования целочисленного значения Σε ошибки (разности).
[0027] Когда давление сгорания Pc, выходная температура регенеративного охлаждения Tjmf, частота вращения топливного насоса Nf, частота вращения насоса окислителя No, выходное давление топливного насоса Pdf и выходное давление насоса окислителя Pdo выбираются в качестве величины внутреннего состояния, например, вектора ε ошибки может быть записан как матрица из (ΔPc, ΔTjmf, ΔNf, ΔNo, ΔPdf, ΔPdo, ΣΔPc, ΣΔTjmf, ΣΔNf, ΣΔNo, ΣΔPdf, ΣΔPdo), как показано на ФИГ. 3(a). В этом примере, поскольку вектор ε ошибки включает в себя 12 переменных, вектор ε ошибки содержится в векторном пространстве R12, сформированном этими переменными.
[0028] Этап предсказания (этап 4) включает в себя этап ввода (этап 41), на котором вводят в имитационную модель 3 такое же входное значение u управления, что и работа объекта 2 наблюдения, и этап вычисления предсказанного значения (этап 42), на котором вычисляют предсказанное значение х величины внутреннего состояния на основе входного значения u управления. На этапе вычисления предсказанного значения (этап 42) (этап предсказания (этап 4)), как показано на ФИГ. 3(b), можно вычислять предсказанное значение xn на основе измеренного значения xn-1^, которое было измерено непосредственно ранее во временном ряде (то есть, последнего значения, ранее измеренного во временном ряде). То есть, предсказанное значение xn вычисляется на основе измеренного значения xn-1^, а предсказанное значение xn+1 вычисляется на основе измеренного значения xn^. С помощью этого способа накопление ошибки может быть заблокировано, точность предсказанного значения xn может быть улучшена, и, следовательно, точность диагностирования неисправности может быть улучшена.
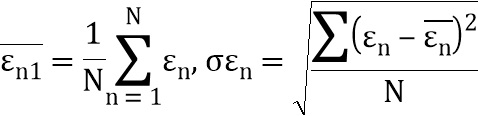
[0029] На этапе расчета расстояния Махаланобиса (этап 53) для вычисления расстояния Махаланобиса MD из вектора ε ошибки, сначала, вектор ε ошибки стандартизуется посредством использования выражения 1 для преобразования вектора ε ошибки в состояние такое, чтобы вектор ε ошибки не зависел от единицы физической величины. Чтобы стандартизовать вектор ε ошибки, целый вектор среднего значения во время периода работы
[Уравнение 1]

и отклонение
[Уравнение 2]

используются.
[0030] [Уравнение 3]
 ... (Выражение 1)
... (Выражение 1)
где
[Уравнение 4]
Вектор εn" ошибки, стандартизованный на основе выражения 1, выражается как εn и используется в последующем вычислении.
[0031] Затем расстояние Махаланобиса MD вычисляется посредством использования выражения 2. Здесь εT указывает транспонированную матрицу вектора ε ошибки, и dim(ε) указывает размерность вектора ε ошибки. Более того, может быть выведена ковариационная матрица, например, из накопленных данных прошлого, которые были диагностированы как нормальные.
[0032] [Уравнение 5]
 ...(Выражение 2)
...(Выражение 2)
где
[Уравнение 6]

является ковариационной матрицей.
[0033] Посредством вычисления расстояния Махаланобиса MD и соединения эквидистантных точек, например, может быть вычислена корреляция между величинами внутреннего состояния, показанными на ФИГ. 4(a). Ошибка становится большой, когда одна удаляется от центра по существу эллиптической области, показанной на этом чертеже. Поэтому можно диагностировать, что имеется неисправность, когда значение находится за пределами этой области. Корреляция, показанная на ФИГ. 4(а), представляет собой корреляцию между двумя переменными, то есть, величинами D1 и D2 внутреннего состояния, чтобы способствовать интуитивному пониманию. Из этой корреляции можно понять, что допустимое значение ошибки является большим вдоль главной оси этой по существу эллиптической области, и допустимое значение ошибки является маленьким вдоль малой оси этой по существу эллиптической области. Хотя на этом чертеже не показано, 12-мерная корреляция получается, когда используются 12 переменных, как упомянуто выше по тексту.
[0034] На этапе 6 диагностирования неисправности, например, как показано на ФИГ. 4(b), расстояние Махаланобиса MD вычисляется в отношении ошибки (разности), которая изменяется со временем, каждый раз при выполнении диагностирования. Более того, делается определение, находится ли ошибка (разность) в пределах расстояния Махаланобиса MD, каждый раз, когда вычисляется расстояние Махаланобиса MD. Например, расстояние Махаланобиса MD1 в момент времени t1, расстояние Махаланобиса MD2 в момент времени t2, расстояние Махаланобиса MD3 в момент времени t3, расстояние Махаланобиса MD4 в момент времени t4 и расстояние Махаланобиса MD5 в момент времени t5 время от времени изменяются на основе окружающих условий, рабочих условий и подобного в данный момент времени. График с ФИГ. 4 (b) показан, чтобы способствовать интуитивному пониманию способа диагностирования неисправности согласно настоящему варианту осуществления.
[0035] В способе диагностирования неисправности и в системе 1 диагностирования неисправности согласно настоящему варианту осуществления генерируется имитационная модель 3, которая имитирует внутреннее состояние объекта 2 наблюдения, и, является ли объект 2 наблюдения неисправным, диагностируется посредством использования разности (x^-x) между измеренным значением x^, полученным объектом 2 наблюдения, и предсказанным значением x, вычисленным имитационной моделью 3. Соответственно, предсказанное значение х, которое соответствует окружающим условиям и/или рабочим условиям в момент времени, когда осуществляется диагностирование неисправности, может быть вычислено имитационной моделью 3. Более того, поскольку была использована разность, измеренное значение x^, полученное объектом 2 наблюдения, может быть заменено значением изменения нормального значения. Соответственно, даже если рабочее состояние объекта 2 наблюдения является неустойчивым состоянием, может быть проведено его динамическое изменение и может быть предпринято действие, и диагностирование неисправности объекта 2 наблюдения может быть выполнено не только в устойчивом состоянии, а также в неустойчивом состоянии.
[0036] ФИГ. 5(a)-5(c) представляют собой объяснительные чертежи для проверки эффективности, когда настоящее раскрытие применяется к двигателю повторно используемого космического аппарата, и результат диагностирования неисправности, основанный на входном значении управления, показан на ФИГ. 5(a), то же самое, основанное на имитированных данных измеренного значения, показано на ФИГ. 5(b), и то же самое, основанное на расстоянии Махаланобиса, показано на ФИГ. 5(c). На ФИГ. 5(а) и ФИГ. 5(b) значение тяги показано непрерывной линией, значение топлива показано пунктирной линией, значение окислителя показано альтернативной длинной и короткой штриховой линией, и значение давления сгорания показано посредством двухточечной цепной линии. На ФИГ. 5(а) участок кривой тяги, которая выступает вверх (по существу трапецеидальный участок), имитирует неустойчивое состояние.
[0037] Количество топлива и окислителя контролируются для получения тяги, показанной на ФИГ. 5(а). Здесь, чтобы проверить эффективность диагностирования неисправности, выполненного посредством использования расстояния Махаланобиса MD, как показано на ФИГ. 5(b), посредством установки значение смещения (участка α на чертеже) относительно нормального измеренного значения, были сгенерированы имитированные данные измеренного значения, которое намеренно включает в себя неисправное значение. Когда этап 5 вычисления расстояния Махаланобиса выполняется посредством использования имитированных данных измеренного значения и предсказанного значения, вычисленного имитационной моделью 3, получается результат, показанный на ФИГ. 5(c).
[0038] На фиг. 5(c), непрерывная линия показывает изменение расстояния Махаланобиса MD с течением времени, и черные точки показывают моменты времени, когда диагностирование считается неисправным. Из этого результата проверки следует понимать, что расстояние Махаланобиса MD частей, соответствующих смещенным участкам, в которых были намеренно установлены неисправные значения, были диагностированы как неисправные. Соответственно, можно подтвердить, что способ диагностирования неисправности и система 1 диагностирования неисправности согласно настоящему варианту осуществления способны выполнять диагностирование неисправности, когда рабочее состояние включает в себя неустойчивое состояние.
[0039] Настоящее раскрытие не ограничивается вышеупомянутыми вариантами осуществления и может быть реализовано посредством внесения различных изменений в объем, который не отклоняется от сути настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТИ ДЛЯ ПРИБОРА КОНТРОЛЯ ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2623321C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ И ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2017 |
|
RU2648413C1 |
| ДИАГНОСТИКА НЕИСПРАВНОСТЕЙ ВО ВРЕМЯ ИСПЫТАНИЯ ТУРБИННОЙ УСТАНОВКИ | 2017 |
|
RU2694105C1 |
| ОСНОВАННАЯ НА МОДЕЛИ СИСТЕМА ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1997 |
|
RU2155328C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| Способ диагностирования неисправностей динамических объектов | 1987 |
|
SU1462254A1 |
| Способ диагностирования технического состояния газотурбинных двигателей по термогазодинамическим параметрам на переходных и установившихся режимах (от холостого хода до режима номинальной мощности) с применением теории инвариантов | 2021 |
|
RU2774092C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2133952C1 |
Изобретение относится к системам диагностики. В способе диагностирования неисправности диагностируют неисправность объекта наблюдения, имеющего рабочее состояние, включающее в себя неустойчивое состояние. Способ также содержит этап генерирования имитационной модели объекта наблюдения. На этапе измерения измеряют величину внутреннего состояния в рабочем состоянии объекта наблюдения и извлекают измеренное значение. На этапе предсказания вводят в имитационную модель аналогичное входное значение управления, используемое в рабочем состоянии объекта наблюдения, и вычисляют предсказанное значение величины внутреннего состояния объекта наблюдения. На этапе вычисления расстояния Махаланобиса вычисляют расстояние Махаланобиса из разности между измеренным значением и предсказанным значением. Далее диагностируют неисправность на основе расстояния Махаланобиса. Диагностируется неисправность в устойчивом и неустойчивом состоянии. 2 н. и 5 з.п. ф-лы, 5 ил.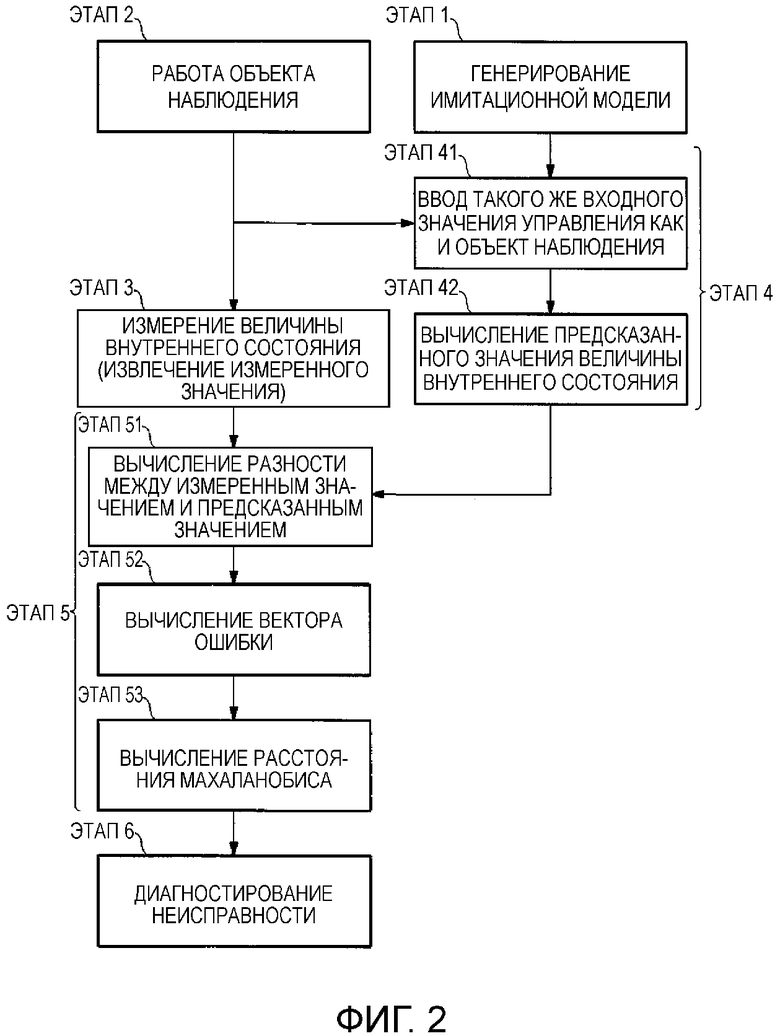
1. Способ диагностирования неисправности, в котором диагностируют неисправность объекта наблюдения, имеющего рабочее состояние, которое включает в себя неустойчивое состояние, причем способ диагностирования неисправности содержит:
этап генерирования модели, на котором генерируют имитационную модель объекта наблюдения;
этап измерения, на котором измеряют величину внутреннего состояния в рабочем состоянии объекта наблюдения и извлекают измеренное значение;
этап предсказания, на котором вводят в имитационную модель аналогичное входное значение управления, используемое в рабочем состоянии объекта наблюдения, и вычисляют предсказанное значение величины внутреннего состояния объекта наблюдения;
этап вычисления расстояния Махаланобиса, на котором вычисляют расстояние Махаланобиса из разности между измеренным значением и предсказанным значением; и
этап диагностирования неисправности, на котором диагностируют на основе расстояния Махаланобиса, является ли рабочее состояние объекта наблюдения неисправным.
2. Способ диагностирования неисправности по п. 1, при этом этап вычисления расстояния Махаланобиса включает в себя вычисление вектора ошибки, который включает в себя разность и целочисленное значение разности в качестве его компонентов.
3. Способ диагностирования неисправности по п. 2, при этом этап предсказания включает в себя вычисление предсказанного значения на основе измеренного значения, которое было измерено непосредственно ранее во временном ряде.
4. Система диагностирования неисправности для диагностирования неисправности объекта наблюдения, имеющего рабочее состояние, которое включает в себя неустойчивое состояние, причем система диагностирования неисправности содержит:
имитационную модель, которая имитирует объект наблюдения;
блок измерения, сконфигурированный с возможностью измерения величины внутреннего состояния в рабочем состоянии объекта наблюдения;
устройство диагностирования, которое вычисляет расстояние Махаланобиса из разности между предсказанным значением, вычисленным имитационной моделью, и измеренным значением, извлеченным блоком измерения, и диагностирует на основе расстояния Махаланобиса, является ли рабочее состояние объекта наблюдения неисправным; и
блок управления, сконфигурированный с возможностью передачи аналогичного входного значения управления по меньшей мере объекту наблюдения и имитационной модели.
5. Система диагностирования неисправности по п. 4, при этом устройство диагностирования вычисляет расстояние Махаланобиса на основе вектора ошибки, который включает в себя разность и целочисленное значение разности в качестве его компонентов.
6. Система диагностирования неисправности по п. 5, при этом имитационная модель вычисляет предсказанное значение на основе измеренного значения, которое было измерено непосредственно ранее во временном ряде.
7. Система диагностирования неисправности по п. 4, при этом объект наблюдения является двигателем для повторно используемого космического аппарата.
| JP 2011090382 A, 06.05.2011 | |||
| JP 2014035282 A, 24.02.2014 | |||
| JP H06103481 A, 15.04.1994 | |||
| WO 2012052696 A1, 26.04.2012 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОНТРОЛЬНО-ДИАГНОСТИЧЕСКИХ ТЕСТОВ | 2009 |
|
RU2413976C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТЕСТОВ ДЛЯ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ДИАГНОСТИКИ НЕИСПРАВНОЙ АППАРАТУРЫ | 2011 |
|
RU2441271C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ САМОЛЕТА | 2006 |
|
RU2385456C2 |

