ТЕХНИЧЕСКАЯ ОБЛАСТЬ
[0001] Настоящее изобретение относится к устройству управления автомобилем.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Существуют автомобили, способные двигаться накатом, при этом во время движения ведущие колеса отключены от двигателя, и автомобиль двигается по инерции, что позволяет сократить расход топлива. Например, Патентный документ 1 описывает метод, при котором оценивается в виде показателей сила нажатия на педаль акселератора и частота вращения дисков сцепления и на основе смещения координат этих показателей на схеме управления накатом определяется, следует ли выполнять движение накатом.
[0003] Патентный документ 1: Опубликованная японская патентная заявка №2010-203544
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0004] Если используются обычные технические приемы определения того, можно ли выполнять движение накатом, например, описанные в Патентном документе 1, движение накатом может противоречить намерению водителя снизить скорость в определенных дорожных условиях или в зависимости от сценария управления автомобилем, что для водителя может стать причиной беспокойства и чувства дискомфорта. Например, когда водитель имеет выраженное намерение снизить скорость, поскольку автомобиль двигается вверх или вниз по крутому склону, или в соответствии с сигналами светофора, или при пересечении железнодорожного переезда, движение накатом способно причинить водителю беспокойство или чувство дискомфорта.
[0005] Настоящее изобретение было разработано с учетом вышеизложенного, и его предметом является устройство управления автомобилем, способное предотвращать движение накатом, если последнее может стать причиной беспокойства или чувства дискомфорта для водителя.
[0006] Для решения вышеописанной проблемы изобретение представляет устройство управления автомобилем, предназначенное для автомобиля, способного выполнять движение накатом, при этом, когда нет команды на выполнение ускорения или торможения во время движения автомобиля, трансмиссия от двигателя к ведущим колесам отключена, и автомобиль может двигаться по инерции, при этом в состоянии, в котором нет команды на выполнение ускорения или торможения автомобиля, и крутящий момент передается от двигателя к ведущим колесам, а необходимость выполнять движение накатом определяется путем сравнения требуемого темпа торможения, который оценивается как темп торможения, который в дальнейшем потребуется от автомобиля, и темпа торможения, который оценивается как темп торможения при движении накатом; при этом, когда принято решение выполнять движение накатом, передача крутящего момента от двигателя к ведущим колесам отключена, и выполняется движение накатом; когда же принято решение не выполнять движение накатом, передача крутящего момента от двигателя к ведущим колесам сохраняется.
[0007] Предпочтительно, чтобы в устройстве управления автомобилем требуемый темп торможения превышал ожидаемый темп торможения, когда нет команды на выполнение торможения автомобиля, и равнялся ожидаемому темпу торможения, когда имеется команда на выполнение торможения автомобиля.
[0008] Предпочтительно, чтобы в устройстве управления автомобилем ожидаемый темп торможения, когда нет команды на выполнение торможения автомобиля, определялся на основе скорости автомобиля и градиента уклона дороги.
[0009] Предпочтительно, чтобы устройство управления автомобилем включало устройство сбора данных, осуществляющее сбор и накопление ситуативной информации, касающейся автомобиля, и чтобы ожидаемый темп торможения, когда имеется команда на выполнение торможения автомобиля, определялся на основе ситуативной информации, касающейся автомобиля, которая была получена устройством сбора данных.
[0010] Предпочтительно, чтобы в устройстве управления автомобилем определяющий критерий того, можно ли выполнять движение накатом, менялся в зависимости от сценария управления автомобилем.
[0011] Предпочтительно, чтобы в устройстве управления автомобилем был реализован механизм отсечки впрыска топлива в двигатель, когда принято решение не выполнять движение накатом.
[0012] В устройстве управления автомобилем в соответствии с данным изобретением, когда соблюдены условия для выполнения движения накатом, решение о возможности выполнять движение накатом принимается на основе сравнения требуемого темпа торможения, то есть темпа торможения, который в дальнейшем потребуется от автомобиля, и темпа торможения при движении накатом, то есть темпа торможения во время движения накатом. Таким образом, решение о нецелесообразности выполнения движения накатом может быть принято при сравнении требуемого темпа торможения и темпа торможения при движении накатом. Как следствие, маловероятно, что движение накатом будет выполняться, когда, например, имеется команда на выполнение торможения автомобиля с темпом, превышающим текущий темп торможения, при этом водитель будет значительно реже испытывать чувство беспокойства и дискомфорта. В результате достигается эффект, при котором устройство управления автомобилем в соответствии с настоящим изобретением способно предотвращать движение накатом, если последнее может стать причиной беспокойства и чувства дискомфорта для водителя.
КРАТКОЕ ОПИСАНИЕ ИЛЛЮСТРАЦИЙ
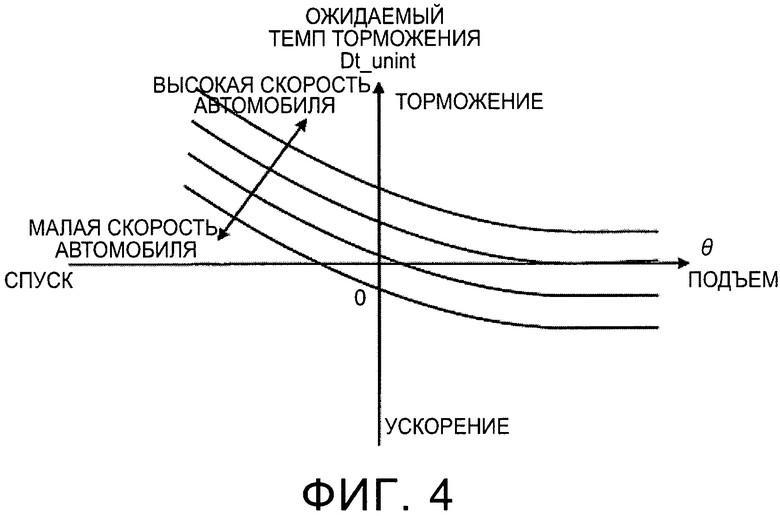
[0013] [ФИГ.1] ФИГ.1 представляет собой принципиальную схему устройства управления автомобилем в соотвествии с одним из вариантов осуществления настоящего изобретения.
[ФИГ.2] На ФИГ.2 представлена функциональная схема, изображающая процесс управления движением накатом, выполняемый устройством управления автомобилем в соотвествии с данным вариантом осуществления настоящего изобретения.
[ФИГ.3] ФИГ.3 иллюстирует способ расчета ожидаемого темпа торможения Dt_int, когда имеется команда на выполнение торможения автомобиля.
[ФИГ.4] ФИГ.4 представляет пример схемы расчета ожидаемого темпа торможения Dt_unint, когда нет команды на выполнение торможения автомобиля.
[ФИГ.5] ФИГ.5 изображает факторы, учитываемые при расчете темпа торможения при движении накатом Dn.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0014] Один из вариантов исполнения устройства управления автомобилем в соответствии с настоящим изобретением представлен далее со ссылкой на прилагаемые иллюстрации. Подобным или соответствующим компонентам присвоены одинаковые ссылочные номера, и их описание не будет приводиться повторно.
[0015] Конфигурация устройства управления автомобилем 10 согласно данному варианту изобретения изначально описана со ссылкой на ФИГ.1. Как показано на ФИГ.1, устройство управления автомобилем 10 настоящего варианта осуществления изобретения установлено на автомобиле 1.
[0016] Автомобиль 1 включает в себя двигатель 2, трансмиссию 3 и ведущие колеса 4. Двигатель 2 представляет собой двигатель внутреннего сгорания, который является приводным агрегатом автомобиля 1. Приводная мощность (крутящий момент) двигателя управляется количеством впрыскиваемого топлива. Трансмиссия 3 представляет собой механизм передачи приводной мощности, который передает приводную мощность, создаваемую двигателем 2, к ведущим колесам 4. Трансмиссия 3 включает в себя сцепление С1, которое разъемно соединяется с вращающимся валом двигателя 2. Сцепление С1 представляет собой, например, устройство сцепления фрикционного типа. Когда сцепление включено, двигатель 2 и ведущие колеса 4 соединены между собой, и приводная мощность от двигателя 2 передается на ведущие колеса 4. Когда сцепление отключено, двигатель и ведущие колеса разъединены, и передача приводной мощности от двигателя 2 на ведущие колеса 4 прерывается. Ведущие колеса 4 приводятся в движение благодаря приводной мощности, сообщаемой двигателем 2 и передаваемой трансмиссией 3, что позволяет автомобилю 1 совершать движение вперед и движение обратным ходом.
[0017] Узлы автомобиля 1, такие как двигатель 2 и трансмиссия 3 (сцепление С1), управляются устройством управления автомобилем 10 на основе данных, получаемых от различных датчиков, установленных на автомобиле. В частности, в настоящем варианте осуществления изобретения устройство управления автомобилем 10 сконструировано таким образом, что оно способно прерывать передачу крутящего момента от двигателя 2 на ведущие колеса 4 и управлять движением накатом, что позволяет автомобилю 1 двигаться по инерции, когда нет команды на выполнение ускорения или торможения автомобиля во время движения. Говоря более конкретно, устройство управления движением накатом включает в себя, по крайней мере, одно из перечисленных далее устройств: устройство управления торможением в экологичном режиме, устройство управления движением на холостом ходу и N-устройство управления инерциальным движением. Устройство управления торможением в экологичном режиме, устройство управления движением на холостом ходу и N-устройство управления инерциальным движением представляют собой устройства управления движением, благодаря которым автомобиль 1 способен двигаться, когда сцепление С1 отключено и не осуществляется передача крутящего момента от двигателя 2 к ведущим колесам 4. Подобные устройства управления позволяют осуществлять движение накатом, когда автомобиль 1 способен двигаться по инерции.
[0018] В режиме управления торможением в экологичном режиме и управления движением на холостом ходу автомобиль 1 может двигаться при отключенном сцеплении С1 и неработающем двигателе 2. Благодаря возможности управления торможением в экологичном режиме и управления движением на холостом ходу достигается большая экономия топлива, поскольку отсутствует расход топлива в двигателе 2. Различие между устройством управления торможением в экологичном режиме и устройством управления движением на холостом ходу состоит в том, что устройство управления торможением в экологичном режиме преимущественно останавливает работу двигателя 2 и переводит двигатель в режим работы на холостом ходу, когда автомобиль 1 осуществляет торможение или останавливается, если водитель нажимает на педаль тормоза, в то время как устройство управления движением на холостом ходу принудительно останавливает работу двигателя 2 и переводит двигатель в режим работы на холостом ходу не только тогда, когда автомобиль 1 осуществляет торможение или останавливается при нажатии на педаль тормоза.
[0019] N-устройство управления движением по инерции принуждает автомобиль 1 двигаться в состоянии, когда сцепление С1 отключено, а двигатель 2 продолжает работать. Благодаря N-устройству управления движением по инерции сокращается рабочая нагрузка и достигается экономия топлива, поскольку не выполняется торможение двигателем. Более того, поскольку число оборотов двигателя 2 поддерживается на прежнем уровне, достигается отличное ускорение, когда после использования N-устройства управления движением по инерции автомобиль возвращается к нормальному режиму движения.
[0020] Управление движением по инерции с использованием таких устройств, как устройство управления торможением в экологичном режиме, устройство управления движением на холостом ходу и N-устройство управления движением по инерции применяется обычно тогда, когда нет команды на выполнение ускорения автомобиля, например, когда режим ускорения ОТКЛЮЧЕН. Условия задействования каждого устройства определяются, исходя из, например, таких факторов, как состояние тормозов, скорость автомобиля, уровень заряда аккумуляторной батареи и градиент уклона дороги.
[0021] Устройство управления автомобилем 10 согласно данному изобретению сконфигурировано таким образом, что оно также способно выполнять отсечку подачи топлива в двигатель 2 во время движения автомобиля, за счет чего достигается экономия топлива.
[0022] Устройство управления автомобилем 10 соединено с датчиком ускорения 21, датчиком переключения передач 22, датчиком скорости автомобиля 23, датчиком градиента уклона дороги 24, датчиком торможения 25, датчиком получения данных инфраструктуры 26, двигателем 2 и трансмиссией 3 (сцеплением С1).
[0023] Датчик ускорения 21 измеряет темп ускорения, который пропорционален силе нажатия на педаль акселератора. Датчик переключения передач 22 определяет положение рычага передач в соответствии с изменением положения рычага переключения передач. Датчик скорости автомобиля 23 считывает скорость движения автомобиля 1. Датчик скорости автомобиля 23 измерять скорость автомобиля, например, на основе скорости вращения каждого колеса автомобиля 1.
[0024] Датчик градиента уклона дороги 24 измеряет градиент уклона дорожного полотна. Датчик градиента уклона дороги 24 способен определять или оценивать градиент уклона дороги, по которой двигается автомобиль 1, на основе, например, наклона автомобиля 1 в продольном направлении.
[0025] Датчик торможения 25 определяет силу торможения или же то, была ли вообще задействована тормозная система. Сила торможения определяется, например, ходом педали тормоза или силой нажатия на педаль тормоза. Сам факт использования/неиспользования тормозной педали может определяться, например, прерывателем, подключенным к педали тормоза.
[0026] Датчик получения данных инфраструктуры (устройство сбора данных) 26 получает данные инфраструктуры (ситуативную информацию), то есть данные об окружающей обстановке автомобиля 1, которые могут быть получены во взаимодействии с инфраструктурой. Датчик получения данных инфраструктуры 26 может быть реализован в виде различных устройств, например, в виде устройства, в которое разнообразная информация передается или принимается приемопередатчиком, таким, как светомаяк, расположенный на обочине дороги, в нижеперечисленные системы (или принимается из таких систем): устройство обмена информацией о дорожных условиях автомобиля 1, устройство системы глобального позиционирования (GPS), бортовой навигатор, устройство обмена информацией между транспортными средствами и устройство приема информации из центра системы обмена информацией и сообщениями между транспортными средствами (VICS). Датчик получения данных инфраструктуры 26 получает, например, информацию о ситуации на дороге, по которой двигается автомобиль 1, или сигнальные данные светофоров по ходу движения автомобиля 1 в качестве данных инфраструктуры. Информация о дорожных условиях обычно включает информацию об ограничении скорости на дороге, по которой двигается автомобиль 1, и о местоположении стоп-линий на перекрестках. Сигнальные данные обычно включают данные о режимах работы светофора - переключении зеленого, желтого и красного сигналов, а также о временных интервалах между переключением сигналов.
[0027] Устройство управления автомобилем 10 определяет, можно или нет активировать устройство управления движением накатом, на основе информации, поступающей от датчика ускорения 21, датчика переключения передач 22, датчика скорости автомобиля 23, датчика градиента уклона дороги 24, датчика торможения 25 и датчика получения данных инфраструктуры 26, и выключает сцепление С1 трансмиссии 3 или же осуществляет отсечку подачи топлива, благодаря чему прекращается впрыск топлива в двигатель 2, в зависимости от принятого решения.
[0028] Говоря более конкретно, как показано на ФИГ.1, устройство управления автомобилем 10 сконструировано таким образом, что оно способно выполнять функцию блока вычисления требуемого темпа торможения 11, блока вычисления темпа торможения при движении накатом 12, блока вычисления заданного уровня регулировки 13, блока принятия решения о движении накатом 14, блока управления впрыском топлива 15 и блока управления сцеплением 16.
[0029] Блок вычисления требуемого темпа торможения 11 производит расчет темпа торможения, который будет задан водителем автомобиля 1, иными словами, требуемого темпа торможения Dt, который представляет собой расчетную величину темпа торможения, который будет в дальнейшем применен к автомобилю 1 во время движения автомобиля 1. Говоря более конкретно, блок вычисления требуемого темпа торможения 11 отдельно рассчитывает «ожидаемый темп торможения Dt_int, когда имеется команда на выполнение торможение автомобиля 1» и «ожидаемый темп торможения Dt_unint, когда нет команды на выполнение торможения автомобиля 1 (когда автомобиль движется со средней эксплуатационной скоростью)», и выбирает большее из двух значений, которое и будет требуемым темпом торможения Dt. Метод вычисления Dt_int и Dt_unint описан далее со ссылкой на ФИГ. с 2 по 4.
[0030] Блок вычисления темпа торможения при движении накатом 12 рассчитывает темп торможения при управлении автомобилем 1, когда двигатель отключен от трансмиссии, то есть темп торможения при движении накатом Dn, который представляет собой расчетную величину темпа торможения при управлении автомобилем 1, когда отключение двигателя от трансмиссии (отключение сцепления) выполняется в текущем режиме движения. Интенсивность торможения при движении накатом Dn может быть рассчитана на основе скорости автомобиля, градиента уклона дороги, аэродинамического сопротивления автомобиля 1 и моментов трения различных узлов автомобиля 1. Процесс вычисления подробно описан далее со ссылкой на ФИГ.2 и 5.
[0031] Блок вычисления заданного уровня регулировки 13 вычисляет заданный уровень регулировки AD с тем, чтобы определить возможность задействования устройства управления движением накатом. Заданный уровень регулировки AD может варьировать в зависимости от сценария движения.
[0032] Блок принятия решения о движении накатом 14 принимает решение, возможно ли задействовать устройство управления движением накатом исходя из требуемого темпа торможения Dt, вычисленного блоком вычисления требуемого темпа торможения 11, темпа торможения при движении накатом Dn, вычисленного блоком вычисления темпа торможения при движении накатом 12, и заданного уровня регулировки ΔD, вычисленного блоком вычисления заданного уровня регулировки 13, когда соблюдены условия для возможности движения накатом. Когда принято решение задействовать устройство управления движением накатом, управляющая команда передается в блок управления сцеплением 16, выполняется отключение сцепления С1, прерывается передача крутящего момента от двигателя 2 к ведущим колесам 4, и выполняется движение накатом. Когда принято решение не задействовать устройство управления движением накатом, управляющая команда направляется в блок управления впрыском топлива 15 с сохранением передачи крутящего момента от двигателя 2 к ведущим колесам 4, и срабатывает устройство отсечки подачи топлива, которое прекращает впрыск топлива в двигатель 2.
[0033] Блок управления впрыском топлива 15 регулирует впрыск топлива в двигатель 2 в ответ на получение управляющей команды от блока принятия решения о движении накатом 14.
[0034] Блок управления сцеплением 16 управляет включением/выключением сцепления С1 трансмиссии 3 в ответ на получение управляющей команды от блока принятия решения о движении накатом 14.
[0035] В этом случае устройство управления автомобилем 10 физически представляет собой электронный блок управления (ЭБУ), включающий центральный процессор (ЦПУ), оперативное запоминающее устройство с произвольным доступом (ОЗУ) и постоянное запоминающее устройство (ПЗУ). Выполнение функций различных блоков устройства управления автомобилем 10, показанных на ФИГ.1, обеспечивается благодаря загрузке в ОЗУ прикладной программы, записанной в ПЗУ, и ее выполнению ЦПУ; таким образом, управление устройствами, установленными в автомобиле 1, осуществляется при помощи обработки в ЦПУ данных, которые читаются из ОЗУ или ПЗУ или записываются в них же. Устройство управления автомобилем 10, которое представляет собой ЭБУ автомобиля 1, не ограничивается выполнением функций вышеперечисленных блоков и поддерживает множество других функций. Вышеупомянутое ЭБУ может также включать несколько ЭБУ, таких как ЭБУ двигателя, которое управляет двигателем 2, ЭБУ трансмиссии (ЭБУ ТУМ), которое управляет трансмиссией 3, и ЭБУ трогания с места и остановки (ЭБУ ТиО), которое управляет движением накатом (устройство управления ТиО).
[0036] Функционирование устройства управления автомобилем 10 согласно настоящему изобретению описано ниже со ссылкой на ФИГ. с 2 по 5. ФИГ.2 представляет собой функциональную схему, иллюстрирующую управление работой устройства управления движением накатом, которое осуществляется устройством управления автомобилем 10 согласно настоящему изобретению. ФИГ.3 иллюстрирует способ расчета ожидаемого темпа торможения Dt_int, когда имеется команда на выполнение торможения автомобиля 1. На ФИГ.4 представлен пример схемы расчета ожидаемого темпа торможения Dt_unint, когда нет команды на выполнение торможения автомобиля 1. ФИГ.5 иллюстрирует каждый фактор, учитываемый при вычислении темпа торможения при движении накатом Dn.
[0037] Устройство управления автомобилем 10 согласно настоящему изобретению управляет работой устройства управления движением накатом автомобиля 1, как это показано на схеме, представленной на ФИГ.2. Управление работой устройства осуществляется, например, в каждый заранее определенный период.
[0038] Сначала блок принятия решения о движении накатом 14 определяет, находится ли рычаг переключения передач автомобиля 1 в положении D (движение), на основе входных данных, получаемых от датчика переключения передач 22 (S101). Если рычаг переключения передач находится в положении D, процесс переходит к шагу S102, а если рычаг переключения передач не находится в положении D, система ожидает переключения рычага переключения передач в положение D.
[0039] Затем блок принятия решения о движении накатом 14 определяет, что задействованы или нет акселератор и тормоз (акселератор = ВЫКЛ, тормоз = ВЫКЛ), на основе данных, полученных от датчика ускорения 21 и датчика торможения 25 (S102). Если условия акселератор = ВЫКЛ и тормоз = ВЫКЛ выполнены, процесс переходит к шагу S103. Если условия акселератор = ВЫКЛ и тормоз = ВЫКЛ не выполнены, процесс возвращается к шагу S101.
[0040] Таким образом, когда определено, что рычаг переключения передач на этапе S101 находится в положении D, а на этапе S102, что акселератор и тормоза не задействованы (акселератор = ВЫКЛ, тормоз = ВЫКЛ), блок принятия решения о движении накатом 14 определяет, что во время движения нет команды на выполнение ускорения или торможения автомобиля 1, сцепление С1 включено, крутящий момент передается от двигателя 2 к ведущим колесам 4, и условия выполнения движения накатом соблюдены, то выполняется переход к шагу S103 и последующим шагам.
[0041] Тогда ожидаемый темп торможения Dt_int, при наличии команды на выполнение торможения автомобиля 1, вычисляется блоком вычисления требуемого темпа торможения 11 (S103). «Ожидаемый темп торможения, когда имеется команда на выполнение торможения автомобиля 1», означает здесь темп торможения, который предполагается заданным водителем автомобиля 1 в ответ на присутствие какого-то объекта, при условии, что объект, который вынудил водителя снизить скорость автомобиля 1, расположен впереди по ходу движения автомобиля 1. Ожидаемый темп торможения Dtint в этом случае варьируется в зависимости от типа объекта и дистанции до места, где объект будет достигнут.
[0042] Говоря более конкретно, блок вычисления требуемого темпа торможения 11 вычисляет ожидаемый темп торможения Dt_int, когда имеется команда на выполнение торможения автомобиля 1, при помощи Ур.(1), приведенном ниже, на основе скорости автомобиля, определенной датчиком скорости автомобиля 23, и данных инфраструктуры, полученных датчиком получения данных инфраструктуры 26

где Va - текущая скорость автомобиля, Vb - целевая скорость автомобиля непосредственно на месте объекта, a L - дистанция от текущего положения до этой отметки. Va определяется датчиком скорости автомобиля 23.
[0043] Параметрам Vb и L могут быть установлены разные значения в зависимости от типа объекта. Объект, расположенный по ходу движения автомобиля, может быть идентифицирован в зависимости от сценария движения с использованием данных инфраструктуры, собранных датчиком получения данных инфраструктуры 26. Например, таким объектом может быть красный сигнал светофора, знак остановки, перекресток, поворот по ходу движения и автомобиль, совершающий торможение впереди по ходу движения. Параметрам Vb и L могут быть установлены, например, следующие значения:
- красный сигнал светофора: Vb = 0, L = дистанция до светофора;
- знак остановки: Vb = 0, L = дистанция до знака остановки;
- перекресток: Vb = 0, L=дистанция до перекрестка;
- поворот по ходу движения: Vb = скорость входа в поворот для безопасного прохождения поворота R по ходу движения, L = дистанция до входа в поворот;
- автомобиль, совершающий торможение впереди по ходу движения: Vb = скорость впереди идущего автомобиля, L = дистанция до впереди идущего автомобиля.
[0044] Для всех этих объектов целевая скорость автомобиля Vb на отметке перед объектом будет ниже текущей скорости автомобиля Va, как показано на ФИГ.3. Таким образом, ожидаемый темп торможения Dt_int, вычисляемый при помощи Ур.(1), тем больше, чем больше разница между Va и Vb (отрезок на ФИГ.3), с учетом дистанции L от текущей позиции до отметки.
[0045] Затем блок вычисления требуемого темпа торможения 11 рассчитывает ожидаемый темп торможения Dt_unint, когда нет команды на выполнение торможения автомобиля 1 (S104). В этом случае «ожидаемый темп торможения, когда нет команды на выполнение торможения автомобиля 1» означает темп торможения, который, как ожидается, будет применен водителем автомобиля 1 в зависимости от режима движения или дорожных условий, наблюдаемых при движении автомобиля 1 со средней эксплуатационной скоростью.
[0046] Говоря более конкретно, блок вычисления требуемого темпа торможения 11 рассчитывает ожидаемый темп торможения Dt_unint, когда нет команды на выполнение торможения автомобиля 1, при помощи Ур.(2) на основе скорости автомобиля, определенной датчиком скорости автомобиля 23, и градиента уклона дороги, определенного датчиком градиента уклона дороги 24

где V - текущая скорость автомобиля 1, и θ - текущий градиент уклона дороги, по которой двигается автомобиль 1. На подъеме или на спуске градиент уклона θ будет, соответственно, положительным или отрицательным. Va - определенная датчиком скорость автомобиля 23, а θ определяется датчиком градиента уклона дороги 24.
[0047] Таким образом, Ур.(2) позволяет определить ожидаемый темп торможения Dtunint на основе скорости автомобиля V и градиента уклона θ с использованием схемы, отражающей зависимость между скоростью автомобиля V, градиентом уклона θ и ожидаемым темпом торможения Dt_unint, так, как это показано, например, на ФИГ.4. На ФИГ.4 градиент уклона дороги θ отмечен на горизонтальной оси, а ожидаемый темп торможения Dt_unint - на вертикальной оси. Интенсивность торможения растет по мере смещения по вертикальной оси в положительном направлении, а интенсивность ускорения растет по мере смещения по вертикальной оси в отрицательном направлении.
[0048] На схеме, представленной на ФИГ.4, несколько кривых, которые отражают вариации ожидаемого темпа торможения Dt_unint в соответствии с градиентом уклона дороги θ, соответствуют различным скоростям автомобилей V. Согласно данным кривым графика, когда градиент уклона дороги θ имеет положительное значение, то есть когда впереди подъем, ожидаемый темп торможения Dt_unint задан как преимущественно постоянный, независимо от градиента уклона дороги, а когда градиент уклона дороги 0 имеет отрицательное значение, ожидаемый темп торможения Dt_unint увеличивается по мере продвижения кривой в отрицательном направлении, то есть по мере повышения градиента спуска. Кроме того, кривые, соответствующие скорости автомобиля V, поднимаются вверх по мере того, как скорость автомобиля V растет, то есть в направлении повышения ожидаемого темпа торможения Dt_unint. Иными словами, на схеме, представленной на ФИГ.4, ожидаемый темп торможения Dt_unint повышается с повышением градиента спуска и с увеличением скорости транспортного средства.
[0049] Затем блок расчета требуемого темпа торможения 11 вычисляет требуемый темп торможения Dt (S105). Блок расчета требуемого темпа торможения 11 вычисляет требуемый темп торможения Dt при помощи Ур.(3)

где Dt_int - ожидаемый темп торможения, когда имеется команда на выполнение торможения автомобиля 1 (этот ожидаемый темп торможения вычисляется на этапе S103), Dt_unint - ожидаемый темп торможения, когда нет команды на выполнение торможения автомобиля 1 (этот ожидаемый темп торможения вычисляется на этапе S104).
[0050] Согласно Ур.(3), большее из двух рассчитанных значений - Dt_int и Dt_unint - принимается в качестве требуемого темпа торможения Dt. Данные значения требуемого темпа торможения Dt передаются в блок принятия решения о движении накатом 14.
[0051] Затем блок вычисления темпа торможения при движении накатом 12 вычисляет темп торможения при движении накатом Dn, который представляет собой темп торможения при управлении автомобилем 1, когда двигатель отключен от трансмиссии (сцепление отключено) в текущем режиме вождения (S106).
[0052] Когда двигатель отключен от трансмиссии в автомобиле 1, двигающемся по дороге с градиентом уклона θ, на автомобиль 1 воздействуют внешние силы, такие, как силы на ФИГ.5. В этом случае равновесие сил в направлении движения автомобиля 1 вычисляется при помощи Ур.(4)

где М - вес автомобиля 1, g - гравитационное ускорение, θ - градиент уклона дороги (на подъеме, когда θ>0), FFRIC - общая сумма фрикционных сопротивлений карданной передачи после сцепления С1 (автоматическая трансмиссия, карданный вал, полуось, вал коробки передач и шины), a FAIR - сопротивление воздуха.
[0053] Сопротивление воздуха FAIR может быть в грубом приближении представлено Ур.(5)

где CD - коэффициент сопротивления воздуха, ρ - плотность воздуха, V - скорость автомобиля, и А - проекция фронтальной поверхности автомобиля 1.
[0054] Темп торможения при движении накатом Dn может быть рассчитан при помощи следующего Ур.(6) на основе Ур.(4)

Данные рассчитанного Dn при движении накатом передаются в блок принятия решения о движении накатом 14.
[0055] Заданный уровень регулировки ΔD, на основе которого принимается решение, можно ли задействовать устройство управления движением накатом, затем вычисляется блоком вычисления заданного уровня регулировки 13 (S107).
[0056] Блок вычисления заданного уровня регулировки 13 способен производить вычисления, изменяя заданный уровень регулировки ΔD в зависимости от сценария движения. Заданный уровень регулировки ΔD представляет собой параметр для корректировки критерия, определяющего, можно ли выполнять движение накатом в рамках описанного далее принятия решения о движении накатом (см. шаг S108). Предпосылок для совершения движения накатом тем больше, чем выше заданный уровень регулировки ΔD, и, напротив, предпосылок для движения накатом тем меньше, чем меньше заданный уровень регулировки ΔD. Термин «сценарий вождения», используемый в контексте настоящего варианта изобретения, означает факторы окружающей среды, влияющие на частоту ускорения и торможения при управлении автомобилем 1. Говоря более конкретно, сценарий вождения включает наличие дорожных заторов, длину дистанции до автомобиля спереди по ходу движения, движение в городской среде, незначительные изменения скорости автомобиля или незначительную силу нажатия на педаль акселератора за последний промежуток времени, движение в пригородной зоне, движение по шоссе или скоростной автомагистрали и движение по ровным дорогам.
[0057] Например, когда сценарий вождения предполагает наличие дорожного затора, короткую дистанцию до автомобиля спереди по ходу движения, движение в городской среде и т.п., движение накатом вряд ли способно обеспечить значительную экономию топлива. Соответственно, блок вычисления заданного уровня регулировки 13 задает малый уровень регулировки ΔD, и движение накатом скорее всего выполняться не будет. И, напротив, когда сценарий вождения предполагает незначительные изменения скорости автомобиля или малую силу нажатия на педаль акселератора за последний промежуток времени, движение в пригородной зоне, движение по шоссе или скоростной автомагистрали и движение по ровным дорогам, движение накатом способно обеспечить экономию топлива. Соответственно, задается высокий уровень регулировки ΔD, и вероятность выполнения движения значительно повышается. Информация о рассчитанном уровне регулировки ΔD передается в блок принятия решения о движении накатом 14.
[0058] Таким образом, блок принятия решения о движении накатом 14 определяет, можно ли выполнять движение накатом (S108). Говоря более конкретно, блок принятия решения о движении накатом 14 принимает данное решение с учетом условий, представленных ниже формулой (7).

где Dt - требуемый темп торможения Dt, рассчитанный на этапе S105, Dn - темп торможения при движении накатом Dn, рассчитанный на этапе S106, a ΔD - заданный уровень регулировки ΔD, рассчитанный на этапе S107.
[0059] Когда выполнено условие приведенной выше формулы (7), то есть когда «требуемый темп торможения Dt, представляющий собой расчетную величину темпа торможения, которого желает достигнуть водитель при управлении автомобилем 1» меньше общей суммы «темпа торможения при движении накатом Dn, представляющего собой темп торможения при управлении автомобилем 1, когда двигатель работает на холостых оборотах (при отключенном сцеплении)» и «заданного уровня регулировки ДБ», блок принятия решения о движении накатом 14 определяет, что темп торможения, которого желает достичь водитель (требуемый темп торможения Dt), меньше темпа торможения, достигаемого при движении накатом (темпа торможения при движении накатом Dn), и что движение накатом, скорее всего, не станет источником беспокойства и дискомфорта для водителя, в связи с чем возможно выполнение движения накатом.
[0060] Когда на этапе S108 принято решение, что движение накатом возможно, сцепление С1 трансмиссии 3 отключается блоком управления сцеплением 16, соответственно, отключается передача от двигателя 2 к ведущим колесам 4, крутящий момент больше не передается двигателем 2 на ведущие колеса 4, и автомобиль 1 начинает двигаться накатом (S109). Кроме того, блок управления впрыском топлива 15 может быть настроен таким образом, чтобы одновременно с этим выполнять отсечку подачи топлива в двигатель 2.
[0061] Если же на этапе S108 не выполняется условие, заданное в приведенной выше формуле (7), и темп торможения, которого желает достичь водитель (требуемый темп торможения Dt) больше темпа торможения, достигаемого при движении накатом (темпа торможения при движении накатом Dn), что может стать причиной беспокойства и дискомфорта для водителя, то принимается решение не выполнять движение накатом. В этом случае отключение двигателя от трансмиссии (отключение сцепления) не производится, крутящий момент продолжается передаваться от двигателя 2 на ведущие колеса 4. Вместо этого блок управления впрыском топлива 15 контролирует отсечку подачи топлива в двигатель 2 (S110).
[0062] На функциональной схеме, изображенной на ФИГ.2, алгоритм требуемого темпа торможения Dt на этапах с S103 по S105, темпа торможения при движении накатом Dn на этапе S106 и заданного уровня регулировки AD на этапе S107 можно при необходимости изменять.
[0063] Далее описан полезный эффект от применения устройства управления автомобилем 10 согласно настоящему варианту изобретения.
[0064] Устройство управления автомобилем 10 согласно настоящему варианту изобретения предназначено для автомобиля 1, способного выполнять движение накатом, при этом, когда во время движения нет команды на выполнение ускорения или торможения автомобиля 1, передача крутящего момента от двигателя 2 к ведущим колесам 4 прекращается, и автомобиль 1 может двигаться по инерции. Устройство управления автомобилем 10 сконструировано таким образом, что в условиях, когда во время движения нет команды на выполнение ускорения или торможения автомобиля 1, и приводная мощность передается от двигателя 2 к ведущим колесам 4, решение, можно ли выполнять движение накатом, принимается путем сравнения требуемого темпа торможения Dt, который оценивается как темп торможения, который может в дальнейшем потребоваться при управлении автомобилем 1, и темпа торможения при движении накатом Dn, который оценивается как темп торможения во время движения накатом. Когда принято решение выполнять движение накатом, передача крутящего момента от двигателя 2 к ведущим колесам 4 прекращается и выполняется движение накатом, а когда принято решение не выполнять движение накатом, передача крутящего момента от двигателя 2 к ведущим колесам 4 продолжается.
[0065] Предотвращение движения накатом в подобной конфигурации возможно при определенном соотношении между требуемым темпом торможения Dt и темпом торможения при движении накатом Dn. Как следствие, движение накатом, скорее всего, не будет выполняться, например, когда водитель желает выполнить торможение с темпом, который превышает текущий темп торможения, при этом водитель гораздо реже сталкивается с ситуацией, в которой он испытывает чувство беспокойства и дискомфорта. В результате предотвращается движение накатом в тех случаях, когда оно может стать причиной беспокойства и дискомфорта для водителя.
[0066] В устройстве управления автомобилем 10, соответствующем настоящему варианту изобретения, «требуемый темп торможения Dt» является большим значением из двух величин: ожидаемого темпа торможения Dt_unint, когда нет команды на выполнение торможения автомобиля 1, и ожидаемого темпа торможения Dt_int, когда имеется команда на выполнение ускорения или торможения автомобиля 1.
[0067] В подобной конфигурации темп торможения, которого желает достичь водитель, может быть определен с учетом широкого выбора сценариев вождения, включая ситуацию, в которой водитель автомобиля 1 выдает команду на торможение, и ситуацию, в которой нет команды на выполнение торможения автомобиля 1, а водитель интуитивно желает управлять автомобилем в стабильном режиме. В результате водитель реже испытывает чувство беспокойства и дискомфорта.
[0068] В устройстве управления автомобилем 10 настоящего варианта изобретения ожидаемый темп торможения Dt_unint, когда нет команды на выполнение торможения автомобиля 1, определяется с учетом скорости автомобиля V и градиента уклона дороги 0.
[0069] Чувство дискомфорта, которое испытывает водитель при движении накатом, может быть различным в зависимости от скорости V автомобиля 1 и градиента уклона дороги, по которой двигается автомобиль 1. Например, чувство дискомфорта заметно возрастает, когда автомобиль двигается на высокой скорости или вниз по крутому склону. Соответственно, конфигурация, в которой ожидаемый темп торможения Dt_unint определяется с учетом скорости автомобиля V и градиента уклона дороги 0, предполагает, что движение накатом может выполняться в рамках различных сценариев вождения только тогда, когда это не станет источником беспокойства и дискомфорта для водителя.
[0070] Устройство управления автомобилем 10 согласно настоящему варианту изобретения включает датчик получения данных инфраструктуры 26, который собирает ситуативную информацию, относящуюся к автомобилю 1, при этом ожидаемый темп торможения Dt_int, когда имеется команда на выполнение торможения автомобиля 1, определяется с учетом ситуативной информации, относящейся к автомобилю 1 и принимаемой датчиком получения данных инфраструктуры 26.
[0071] Чувство дискомфорта, испытываемое водителем при движении накатом, может быть различным в зависимости от дистанции L до отметки (например, сигнала светофора или железнодорожного переезда), перед которой автомобиль 1 должен затормозить, или в зависимости от разницы между текущей скоростью автомобиля Va и целевой скоростью автомобиля Vb. Например, когда дистанция до отметки невелика, или когда разность в скорости значительная, желаемый темп торможения будет намного выше. В этих условиях движение накатом, скорее всего, причинит водителю чувство дискомфорта. Соответственно, при оценке ожидаемого темпа торможения Dt_int на основе ситуативной информации, имеющей отношение к автомобилю 1, полученной датчиком получения данных инфраструктуры 26, с учетом вышеупомянутого роста дискомфорта водителя, движение накатом может выполняться в рамках различных сценариев вождения только тогда, когда это не станет источником беспокойства и дискомфорта для водителя.
[0072] В устройстве управления автомобилем 10, соответствующему настоящему варианту изобретения, критерий, определяющий возможность движения накатом, варьирует в зависимости от сценария управления автомобилем 1.
[0073] То, насколько часто водитель будет испытывать чувство дискомфорта, зависит от сценария вождения. Например, в случае вождения с преобладанием периодов движения в стабильном режиме, водитель вряд ли будет испытывать чувство дискомфорта во время движения накатом, но если вождение сопровождается большим количеством ускорений и торможений, водитель, напротив, часто испытывает чувство дискомфорта. Соответственно, конфигурация, в которой критерий, определяющий возможность выполнять движение накатом, варьируется в зависимости от сценария движения, при вождении, в котором движение накатом, скорее всего, не причинит чувство дискомфорта, например, когда преобладают периоды движения в стабильном режиме, возможна большая гибкость при установлении критерия, и возможность для движения накатом будет большей, за счет чего достигается экономия топлива, в то время как в рамках сценария вождения, в котором водитель часто испытывает чувство дискомфорта при движении накатом, например, когда часто применяется ускорение и торможение, выбирается более жесткий критерий принятия решения, и движение накатом, скорее всего, выполняться не будет, а водитель будет реже испытывать чувство дискомфорта.
[0074] В устройстве управления автомобилем 10 согласно настоящему варианту изобретения дополнительно предусмотрено устройство управления отсечкой впрыска топлива в двигатель 2, с сохранением передачи крутящего момента от двигателя 2 к ведущим колесам 4, когда принято решение не совершать движение накатом. За счет этого экономия расхода топлива возможна даже тогда, когда не выполняется движение накатом.
[0075] Выше описаны предпочтительные варианты осуществления настоящего изобретения, однако изобретение не ограничивается этими вариантами. Функциональные блоки устройства управления автомобилем 10, изображенные на РИС.1, описаны в качестве примера для удобства изложения, но могут и применяться другие конфигурации, при условии, что в них будут реализованы аналогичные функции.
[0076] Кроме того, в данных вариантах изобретения описана конфигурация, которая предусматривает наличие устройства управления отсечкой подачи топлива в двигатель 2, если принято решение не выполнять движение накатом, как показано на этапе S110 функциональной схемы, изображенной на ФИГ.2, при этом возможна также и конфигурация, в которой не предусмотрено управление отсечкой подачи топлива, когда принято решение не выполнять движения накатом.
[0077] Кроме того, в данных вариантах изобретения блок принятия решения о движении накатом 14 принимает решение, возможно ли выполнение движения накатом, с использованием формулы (7), как показано на этапе S108 функциональной схемы, изображенной на ФИГ.2, однако могут использоваться и другие условные формулы. Например, вместо формулы (7) могут использоваться условная формула (Dt<Dn), которая сравнивает требуемый темп торможения Dt с темпом торможения при движении накатом Dn, без введения заданного уровня регулировки ΔD в определяющее условие, условная формула (Dt<α×Dn), которая сравнивает требуемый темп торможения Dt с темпом торможения при движении накатом Dn, умноженным на заданную величину α, или условная формула (Dt/Dn<β), которая сравнивает соотношение требуемого темпа торможения Dt и темпа торможения при движении накатом Dn с заданным значением β. Кроме того, условные формулы (Dt<α×Dn+ΔD, Dt/Dn<β+ΔD), полученные путем введения в эти формулы заданного уровня регулировки ΔD, могут быть использованы в тех же целях, что и формула (7).
[0078]
1 автомобиль
2 двигатель
4 ведущие колеса
10 устройство управления автомобилем
26 датчик получения данных инфраструктуры (устройство сбора данных)
Dn темп торможения при движении накатом Dt требуемый темп торможения
Dt_int ожидаемый темп торможения, когда имеется команда на выполнение торможения автомобиля
Dt_unint ожидаемый темп торможения, когда нет команды на выполнение торможения автомобиля
ΔD заданный уровень регулировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2700911C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568151C2 |
| ИЗБИРАТЕЛЬНАЯ АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА | 2006 |
|
RU2400383C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ОТСЕЧКИ ТОПЛИВА ПРИ ЗАМЕДЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2648804C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2564066C2 |
| СПОСОБ ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2588390C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЫКЛЮЧЕНИЕМ АВТОМАТИЧЕСКОГО СЦЕПЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2426019C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2720227C1 |
| СПОСОБ РАБОТЫ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2640433C2 |



Изобретение предназначено для управления торможением накатом. Когда нет команды на выполнение ускорения или торможения автомобиля, и приводная мощность передается от двигателя (2) к ведущим колесам (4), решение о возможности выполнения движения накатом принимается на основе сравнения требуемого темпа торможения Dt, который рассматривается как темп торможения, который должен быть в дальнейшем достигнут автомобилем (1), с темпом торможения при движении накатом Dn, который рассматривается как темп торможения во время движения накатом. При возможном движении накатом отключают сцепление С1 трансмиссии (3), производят также отсечку подачи топлива в двигатель (2). Достигается предотвращение движения накатом в тех случаях, когда оно может стать источником беспокойства и дискомфорта для водителя. 5 з.п. ф-лы, 5 ил.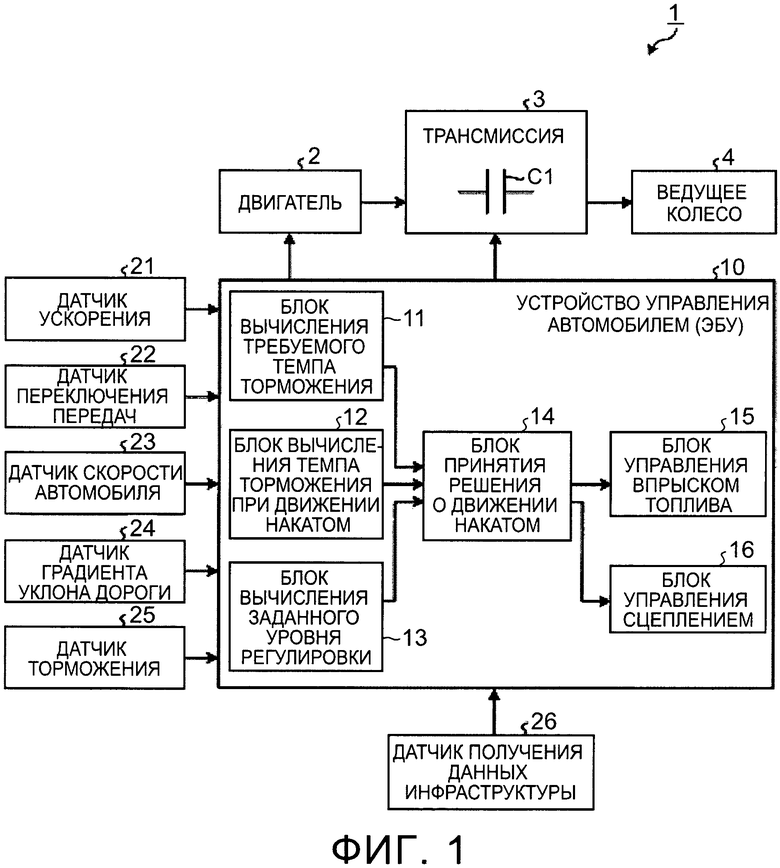
1. Устройство управления автомобилем (10) для автомобиля, способного выполнять движение накатом, в котором когда нет команды на ускорение или торможение во время движения автомобиля, то передача крутящего момента от двигателя (2) к ведущим колесам (4) отключена, и автомобиль имеет возможность двигаться по инерции, отличающееся тем, что
в состоянии, когда нет команды на ускорение или торможение во время движения автомобиля, и крутящий момент передается от двигателя к ведущим колесам, то возможно ли выполнение движения накатом определяется путем сравнения требуемого темпа торможения, определяемого как темп торможения, которого в дальнейшем должен будет достичь автомобиль, и темпа торможения при движении накатом, рассматриваемого как темп торможения во время движения накатом; при этом, когда принято решение выполнять движение накатом, передача крутящего момента от двигателя к ведущим колесам отключается, и выполняется движение накатом, а когда принято решение не выполнять движение накатом, сохраняется передача крутящего момента от двигателя к ведущим колесам.
2. Устройство управления автомобилем по п.1 формулы изобретения, в котором
требуемый темп торможения представляет собой большую из двух величин: ожидаемый темп торможения, когда нет команды на торможение автомобиля, и ожидаемый темп торможения, когда имеется команда на торможение автомобиля.
3. Устройство управления автомобилем по п.2, в котором
ожидаемый темп торможения, когда нет команды на торможение, определяется на основе скорости автомобиля и градиента уклона дороги.
4. Устройство управления автомобилем по п. 2 или 3, которое включает
устройство сбора данных (26), получающее ситуативную информацию, относящуюся к автомобилю, и при этом
ожидаемый темп торможения, когда имеется команда на торможение автомобиля, определяется на основе ситуативной информации, относящейся к автомобилю и которую получает устройство сбора данных.
5. Устройство управления автомобилем по любому из пп. 1-3, в котором определяющий критерий для принятия решения о возможности выполнять движение накатом варьируется в зависимости от сценария управления автомобилем.
6. Устройство управления автомобилем по любому из пп. 1-3, в котором
дополнительно предусмотрено устройство управления отсечкой впрыска топлива в двигатель, если принято решение не выполнять движение накатом.
| JP2011021702A, 03.02.2011 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ | 2006 |
|
RU2389626C2 |
| JP2013104555 A, 30.05.2013 | |||

