ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка заявляет приоритет по международной заявке № PCT/US2014/072577 под названием “Downhole Solenoid Actuator Drive System”, поданной 29 декабря 2014 и включенной в настоящую заявку посредством ссылки во всем объеме.
УРОВЕНЬ ТЕХНИКИ
Углеводороды, такие как нефть и газ, как правило, добывают из подземных пластов, которые могут быть расположены на суше или в море. Выполнение подземных работ и способы, применяемые для извлечения углеводородов из подземной формации, сложны. Обычно подземные работы предполагают выполнение ряда различных этапов, таких как, например, бурение ствола скважины в требуемом месте расположения скважины, обработку скважины для оптимизации добычи углеводородов и осуществление необходимых этапов для добычи и переработки углеводородов из подземного пласта.
Линейные исполнительные приводы могут использоваться в подземных работах для выполнения различных функций, включая управление клапанами и механическими элементами. В одном из вариантов реализации изобретения линейный исполнительный привод используется для управления гидравлическим клапаном во внутрискважинной телеметрической системе. Гидравлический клапан может изменять направление потока бурового раствора, циркулирующего по скважине, что вызывает колебания давления, посредством которых информация со скважины может быть зашифрована и передана на поверхность. В таких видах применения линейный исполнительный привод работает в жестких условиях, при которых температура, влажность, удары и вибрации делают разработку конструкции исполнительного привода сложной задачей.
Линейные соленоидные исполнительные приводы, являющиеся одним из видов линейных исполнительных приводов и используемые во внутрискважинных телеметрических системах, в основном, дополнительно защищены по отношению к условиям в скважине, но, как правило, являются предметом механических поломок механизма, используемого для возвращения исполнительного привода в начальное положение или усталости материала, вызванной силами действующими при возвращении исполнительного привода в начальное положение. Кроме того, обычные линейные соленоидные исполнительные приводы энергетически неэффективны и подвержены проблемам из-за генерации тепла, частично вследствие низкой энергетической эффективности.
ФИГУРЫ
Некоторые конкретные, приведенные в качестве примера, варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные графические материалы.
Фиг. 1 является схематическим изображением, демонстрирующим пример системы подземного бурения, соответствующей аспектам настоящего изобретения.
Фиг. 2 является схематическим изображением, демонстрирующим пример телеметрической системы, соответствующей аспектам настоящего изобретения.
Фиг. 3 является схематическим изображением, демонстрирующим пример соленоидного исполнительного привода, соответствующего аспектам настоящего изобретения.
Фиг. 4 является блок-схемой, иллюстрирующей пример взаимосвязи между током и воздушным зазором для генерирования силы в соленоиде в соответствии с аспектами настоящего изобретения.
Фиг. 5 представлена диаграммой, иллюстрирующей систему линейного исполнительного привода в соответствии с аспектами настоящего изобретения.
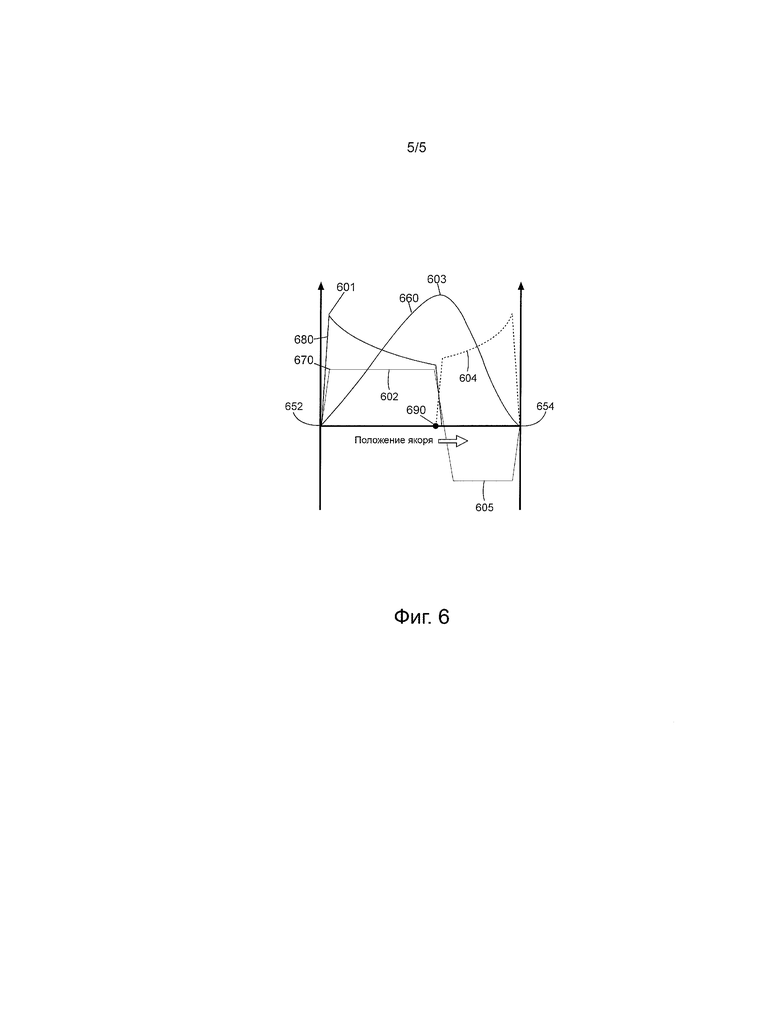
Фиг. 6 является блок-схемой, иллюстрирующей скорость, силу и ток исполнительного привода, генерируемые при использовании приведенной в качестве примера системы внутрискважинного линейного соленоидного исполнительного привода в соответствии с аспектами настоящего изобретения.
Несмотря на то, что варианты реализации настоящего изобретения были изображены, описаны и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, что будет очевидно для специалистов в данной области техники, которые ознакомятся с данным описанием. Изображенные и описанные варианты реализации настоящего изобретения являются примерами и не ограничивают объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В контексте данного описания система обработки информации может содержать любые устройства или совокупность устройств, выполненных с возможностью вычисления, классификации, анализа, передачи, приема, извлечения, создания, ветвления, хранения, отображения, выдачи, обнаружения, регистрации, воспроизведения, обработки или применения любой формы информации, сообщений или данных для целей бизнеса, науки, управления или других целей. Например, система обработки информации может представлять собой персональный компьютер, сетевое устройство хранения данных или любое другое подходящее устройство и может варьироваться по размеру, форме, производительности, функциональности и стоимости. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов для обработки информации, таких как центральный процессор (ЦП) или аппаратное либо программное логическое средство управления, ПЗУ и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы обработки информации могут содержать один или более дисководов, один или более сетевых портов для обмена данными с внешними устройствами, а также различные устройства ввода-вывода (I/O), такие как клавиатура, мышь и видеодисплей. Система обработки информации может также содержать одну или более магистральных шин, выполненных с возможностью обеспечения обмена данными между различными аппаратными компонентами. Она может также содержать один или более модулей сопряжения, выполненных с возможностью передачи одного или более сигналов контроллеру, приводу или подобному устройству.
В контексте данного раскрытия машиночитаемый носитель может включать любые устройства или совокупность устройств, способных хранить данные и/или команды в течение определенного периода времени. Машиночитаемый носитель может включать, например, без ограничения, запоминающий носитель, такой как запоминающее устройство с прямым доступом (например, жесткий диск или гибкий диск), запоминающее устройство с последовательным доступом (например, накопитель на магнитной ленте), компакт-диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и/или флэш-память; а также средства связи, такие как провода, оптические волокна, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или любая комбинация из вышеуказанного.
В данном документе подробно описаны иллюстративные варианты реализации данного изобретения. Для ясности, в настоящем описании могут быть изложены не все особенности фактической реализации. Разумеется, следует иметь в виду, что при разработке любого такого фактического варианта реализации изобретения для достижения конкретных целей реализации предпринимаются многочисленные специфические для реализации решения, которые могут изменяться от одного варианта реализации изобретения к другому. Кроме того, следует иметь в виду, что такой процесс разработки может быть сложным и продолжительным, тем не менее, эта разработка будет рутинным мероприятием для специалистов в данной области техники, использующих преимущества ознакомления с данным описанием.
Для облегчения понимания настоящего изобретения приведены следующие примеры некоторых из вариантов реализации. Приведенные ниже примеры ни в коем случае не следует рассматривать как ограничивающие или определяющие объем настоящего изобретения. Варианты реализации настоящего изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным или другим нелинейным стволам скважины в любом типе подземного пласта. Варианты реализации изобретения могут быть применимы к нагнетательным скважинам, а также добывающим скважинам, включая углеводородные скважины. Варианты реализации могут быть реализованы с использованием инструмента, подходящего для тестирования, извлечения и отбора проб вдоль секций пласта. Варианты реализации могут быть реализованы посредством инструментов, которые, например, могут быть переправлены через канал потока в колонне труб или с использованием проводной линии связи, тросовой проволоки, колонны гибких труб, внутрискважинного робота и т. п. Термин "измерения во время бурения (ИВБ)" является общеиспользуемым при измерениях условий в скважине, относящихся к перемещению и расположению буровой компоновки во время продолжения бурения. Термин "каротаж во время бурения (КВБ)" является общеиспользуемым при подобных операциях, концентрирующихся больше на измерениях параметров пласта. Устройства и способы в соответствии с некоторыми вариантами реализации изобретения могут быть применены в одной или большем количестве проводных линий связи (включая проводную линию связи, тросовую проволоку, колонну гибких труб), скважинного робота и операций выполнения измерений во время бурения (ИВБ) и каротажа во время бурения (КВБ).
Термины "соединение", "присоединенный" или "присоединяет", применяемые в данном документе, предназначены для обозначения либо непрямого, либо прямого соединения. Таким образом, если первое устройство присоединяется ко второму устройству, это соединение может выполняться посредством прямого соединения или посредством непрямого механического или электрического присоединения через другие устройства и соединения. Аналогично, в данном документе принято, что термин "соединен с возможностью связи" обозначает прямое либо непрямое соединение с возможностью связи. Такое соединение может представлять собой проводное или беспроводное соединение, такое как, например, Ethernet или LAN. Такие проводные и беспроводные соединения хорошо известны специалистам в данной области техники и поэтому не будут подробно обсуждаться в данном документе. Таким образом, если первое устройство соединено с возможностью связи со вторым устройством, такое соединение может быть осуществлено посредством прямого присоединения или непрямого присоединения через другие устройства и соединения.
Настоящее изобретение в целом относится к бурению скважин и, в частности, к системе внутрискважинного линейного соленоидного исполнительного привода. Как будет подробно описано ниже, примеры описанных здесь систем внутрискважинного линейного соленоидного исполнительного привода могут обеспечивать управление с обратной связью, посредством чего энергия, используемая для приведения в действие исполнительного привода, может более эффективно использоваться и контролироваться, и, в результате, могут минимизироваться механические нагрузки и усталость материала исполнительного привода. В некоторых вариантах реализации изобретения, энергетическая эффективность системы исполнительного привода может быть дополнительно улучшена с помощью конфигурации управления, способствующей перехвату излишней или накопленной энергии в соленоидах исполнительного привода. Хотя система исполнительного привода описана здесь как система линейного исполнительного привода, размещенного во внутрискважинной телеметрической системе, она не ограничивается данными условиями; скорее управление с обратной связью может быть внедрено в другие типы исполнительных приводов, включая вращательные исполнительные приводы и системы исполнительных приводов, которые могут использоваться в других приложениях.
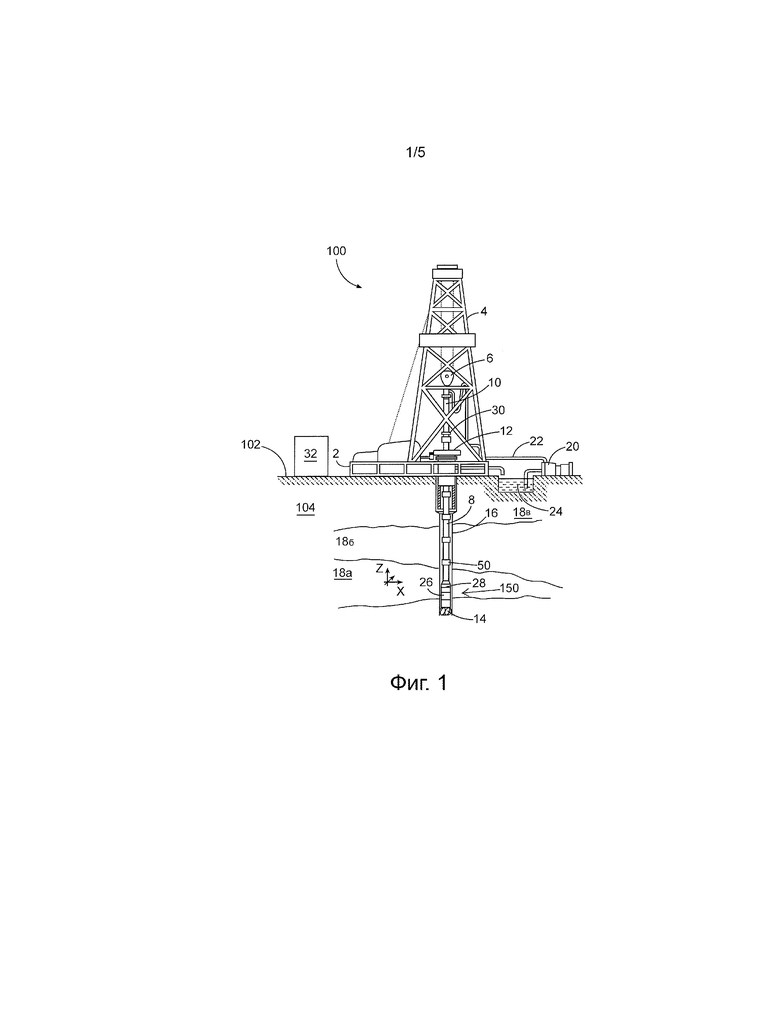
Фиг. 1 является схематическим изображением, иллюстрирующим систему подземного бурения 100, содержащую систему приведения в действие соленоидного исполнительного привода, соответствующую аспектам настоящего изобретения. Система бурения 100 содержит буровую платформу 2, расположенную на поверхности 102. В проиллюстрированном варианте реализации изобретения поверхность 102 включает верхнюю часть пласта 104, содержащую одну или более породных пластов или слоев 18a-с, и буровая платформа 2 может контактировать с поверхностью 102. В других вариантах реализации изобретения, таких как бурение прибрежного шельфа, поверхность 102 может быть отделена от буровой платформы 2 объемом воды.
Система бурения 100 содержит буровую вышку 4, поддерживаемую буровой платформой 2 и оборудованную талевым блоком 6 для подъема и опускания бурильной колонны 8. Ведущая бурильная труба 10 может поддерживать бурильную колонну 8 по мере её опускания через поворотный стол 12. Буровое долото 14 может быть присоединено к бурильной колонне 8 и приводиться скважинным мотором и/или вращением бурильной колонны 8 поворотным столом 12. При вращении буровое долото 14 создает ствол 16 скважины, проходящий сквозь один или большее количество породных пластов или слоев 18a-с. Насос 20 может прокачивать буровой раствор через питающую трубу 22 в ведущую бурильную трубу 10, далее вниз по трубе через внутреннюю часть бурильной колонны 8, через отверстия в буровом долоте 14, обратно на поверхность через затрубное пространство вокруг бурильной колонны 8 и в емкость для хранения бурового раствора 24. Буровой раствор переносит буровой шлам из ствола 16 скважины в емкость 24 и способствует сохранению целостности ствола 16 скважины.
Буровая система 100 может содержать компоновку низа бурильной колонны (КНБК) 150, присоединенную к буровой колонне 8 вблизи бурового долота 14. КНБК может содержать различные скважинные измерительные инструменты и датчики, включая элементы КВБ/ИВБ 26. Примеры элементов КВБ/ИВБ 26 включают антенну, датчики, магнитометры, градиометры и т. д. По мере того, как буровое долото проделывает буровую скважину 16 сквозь пласты 18, элементы КВБ/ИВБ 26 могут осуществлять сбор результатов измерений, относящихся к пласту и буровой компоновке.
В некоторых вариантах реализации изобретения данные, полученные элементами КВБ/ИВБ 26, и данные от других скважинных инструментов и элементов могут передаваться на поверхность 102 телеметрической системой 28. В проиллюстрированном варианте реализации изобретения телеметрическая система 28 размещена в КНБК и соединена с возможностью связи с элементами КВБ/ИВБ 26. Телеметрическая система 28 может передавать данные и результаты измерений от скважинных элементов в виде импульсов давления или волн в растворах, нагнетаемых или циркулирующих через буровую компоновку, таких как буровые растворы, растворы для гидроразрыва и т. д. Импульсы давления могут генерироваться в определенных шаблонах, формах волн или других отображениях данных, примеры которых могут включать двоичное отображение данных, получаемых и декодируемых поверхностным приемником 30. Положительные или негативные импульсы давления могут приниматься поверхностным приемником 30 напрямую или могут приниматься и передаваться посредством сигнальных повторителей 50. Такие сигнальные повторители могут, например, соединяться с бурильной колонной 8 через интервалы, содержать цепи генераторов импульсов жидкости и приемников импульсов жидкости для получения и передачи соответствующих сигналов давления и способствовать передаче высокочастотных сигналов от телеметрической системы 28, которые в противном случае будут ослабляться до того, как достигнут поверхностного приемника 30. Буровая система 100 может дополнительно содержать систему обработки информации 32, расположенную на поверхности 102, соединенной с возможностью связи с поверхностным приемником 30 для получения данных телеметрии от элементов КВБ/ИВБ 26 и обработки данных телеметрии для определения конкретных характеристик пласта 104.
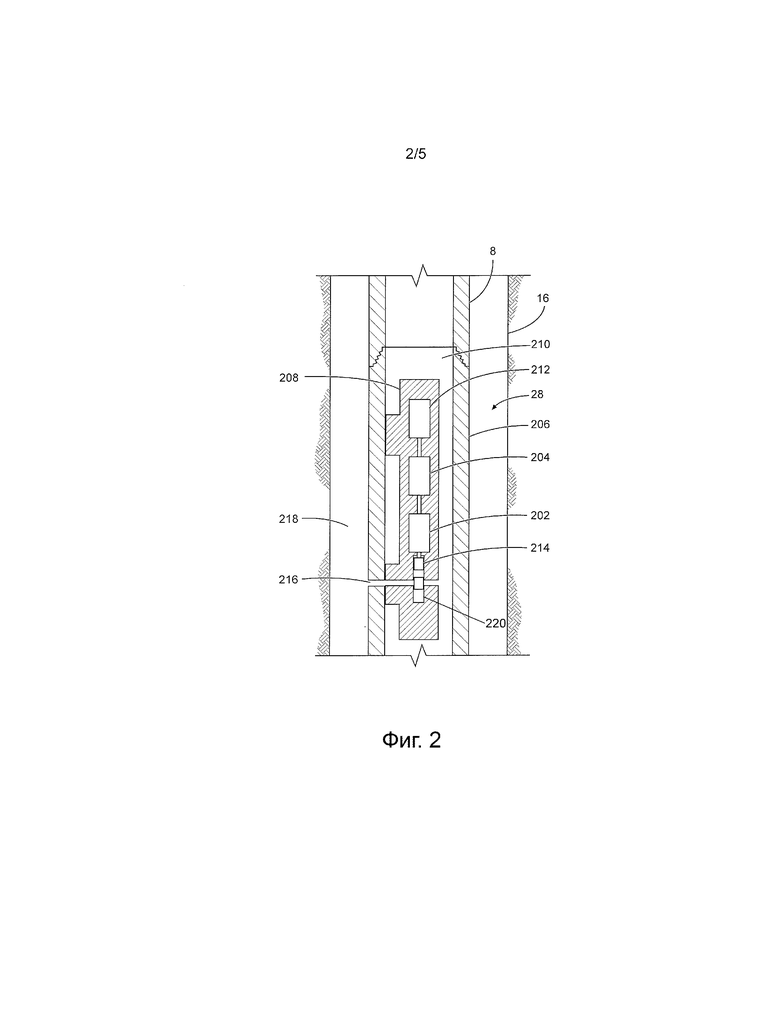
Фиг. 2 является схематическим изображением, демонстрирующим пример варианта реализации телеметрической системы 28, соответствующей аспектам настоящего изобретения. Телеметрическая система 28 может содержать линейный соленоидный исполнительный привод 202 и систему приведения в действие линейного соленоидного исполнительного привода 204, электрически присоединенную с соленоидным исполнительным приводом 202. Линейный соленоидный исполнительный привод 202 и система приведения в действие линейного соленоидного исполнительного привода 204 может быть присоединена к утяжеленной бурильной трубе 206, которая может присоединяться к бурильной колонне 8 в случае, если телеметрическая система 28 располагается в скважине 16. В проиллюстрированном варианте реализации изобретения исполнительный привод 202 и система приведения в действие 204 располагаются в корпусе 208, присоединенным к внутренней поверхности утяжеленной бурильной трубы 206 и расположенным внутри внутреннего отверстия 210 утяжеленной бурильной трубы 206. Корпус 208 может допускать циркуляцию бурового раствора через внутреннее отверстие 210 через один или большее количество каналов или межтрубных пространств между корпусом 208 и утяжеленной бурильной трубой 206. В других вариантах реализации изобретения одно из: исполнительного привода 202 и системы приведения в действие 204, могут размещаться во внешней трубчатой конструкции утяжеленной бурильной трубы 206 для обеспечения большего потока раствора через отверстие 210. Несмотря на то, что проиллюстрирована одна утяжеленная бурильная труба 206, дополнительно может использоваться множество утяжеленных бурильных труб.
Телеметрическая система 28 может дополнительно содержать источник питания 212, присоединенный к системе приведения в действие 204. Источник питания 212 может содержать батарею конденсаторов, способных сохранять и быстро отдавать большие величины мощности, необходимой для приведения в действие соленоидного исполнительного привода 202. В некоторых вариантах реализации изобретения источник питания 212 может также быть присоединен к источнику энергии (не проиллюстрировано), обеспечивающим энергию, сохраняемую в батарее конденсаторов. Примеры источников энергии содержат блоки батарей или гидроэлектрогенераторы. В проиллюстрированном варианте реализации изобретения источник питания 212 размещен в корпусе 208 с системой приведения в действие 204, хотя другие варианты размещения также возможны, включая внешние области утяжеленной бурильной трубы 206. Дополнительно, источник питания 212 может быть включен в систему приведения в действие 204.
Система приведения в действие 204 может выборочно соединять один или большее количество соленоидов соленоидного исполнительного привода 202 с источником питания 212, вызывая перемещение исполнительного привода между первым и вторым положениями с возможностью соответствования положениям элемента, присоединенного к соленоидному исполнительному приводу 202. В проиллюстрированном варианте реализации изобретения соленоидный исполнительный привод 202 присоединен к запорному клапану 214, выполненным с возможностью перемещения между фиксированными положениями внутри камеры 220 в корпусе 208. Эти фиксированные положения могут включать "открытое" положение, в котором запорный клапан 214 дополняет трубопровод для жидкости 216 между внутренним каналом 210 и межтрубным пространством 218, между утяжеленной бурильной трубой 206 и скважиной 16; и "закрытое" положение, в котором запорный клапан 214 блокирует трубопровод для жидкости 216. В случае передвижения запорного клапана 214 в "открытое" положение из "закрытого" положения, буровой раствор, протекающий внутри внутреннего канала 210, может выходить в межтрубное пространство 208, вызывая уменьшение объема бурового раствора внутри внутреннего канала 210 и соответствующее падение давления бурового раствора с возможностью распространения вверх до поверхности по бурильной колонне 8. Напротив, в случае передвижения запорного клапана 214 в "закрытое" положение из "открытого" положения, он может влиять на объем бурового раствора внутри внутреннего канала 210 и, соответственно, увеличивать давление бурового раствора. Соответственно, переключая запорный клапан 214 между “открытым” и “закрытым” положениями, соленоидный исполнительный привод 202 и система приведения в действие 204 могут генерировать импульсы давления бурового раствора, которые используются для передачи данных из забоя на поверхность.
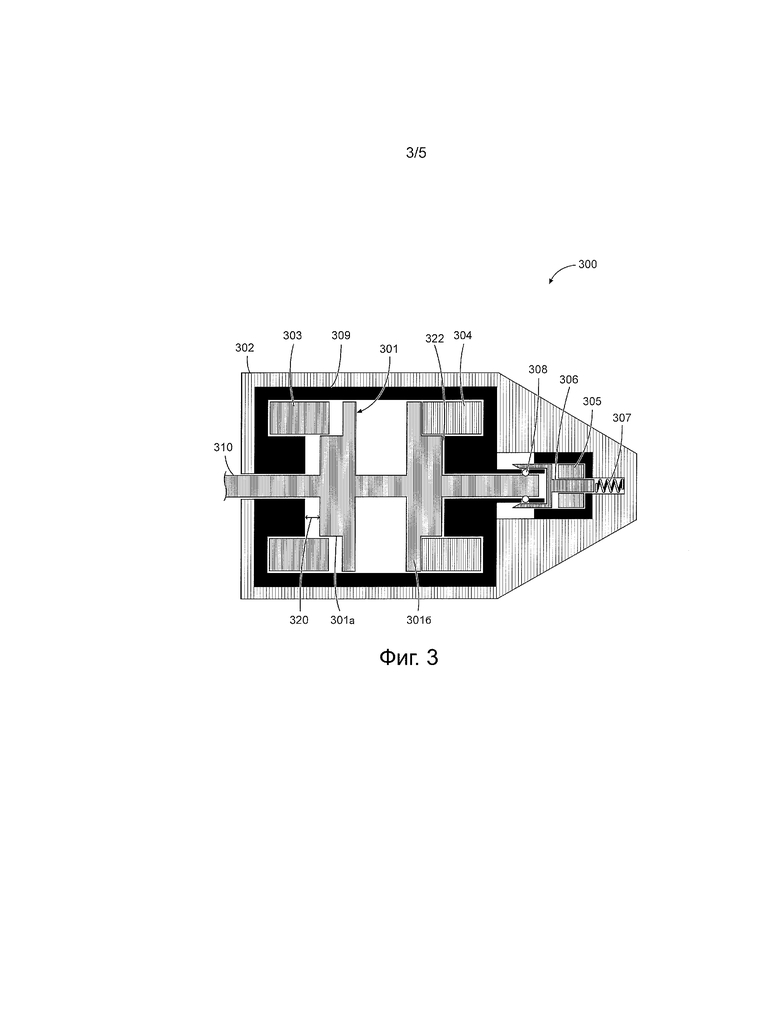
Фиг. 3 является схематическим изображением примера соленоидного исполнительного привода 300, соответствующего аспектам настоящего изобретения. Исполнительный привод 300 может содержать главный якорь 301, по меньшей мере частично расположенный внутри внешнего корпуса 302 и заключенный в магнитную оболочку 309. Как показано, исполнительный привод 300 может содержать линейный исполнительный привод, характеризующийся линейным движением главного якоря 301. Охватывающая магнитная оболочка 309 может содержать "мягкий" магнитный материал, характеризующийся низкой коэрцитивностью, высокой проницаемостью и высокой намагниченностью насыщения, такой, что материалы могут быть намагничены, но не могут оставаться намагниченными. Примеры включают сплавы кобальта и железа и сплавы никеля и железа. Исполнительный привод 300 может дополнительно содержать по меньшей мере два соленоида, использующиеся для движения и удержания якоря 301 в первом и втором аксиальных положениях по отношению к наружному корпусу 302. Якорь 301 может содержать конец 310, по меньшей мере частично пролегающий от корпуса 302, позволяя якорю 301 быть присоединен к движимому элементу, такому как запорный клапан, описанный выше. Движимый элемент затем может перемещаться между фиксированными аксиальными положениями относительно исполнительного привода 300 посредством передвижения якоря 301 внутри корпуса 302.
В проиллюстрированном варианте реализации изобретения исполнительный привод 300 содержит нажимно-вытяжной соленоидный исполнительный привод с возможностью запирания с тремя соленоидами: первым соленоидом 303, вторым соленоидом 304 и третьим соленоидом 305. Третий соленоид 305 может упоминаться как запорный соленоид и может функционировать совместно с запорным якорем 306, пружиной 307, запорными шариками 308 для выборочного механического удержания якоря 301 в первом аксиальном положении внутри корпуса 302, особенно в случае, если исполнительный привод не запитан; в противном случае якорь 301 может свободно перемещаться. В некоторых вариантах реализации изобретения запорные компоненты 305 - 308 могут быть удалены для упрощения конструкции исполнительного привода. Первое аксиальное конечное положение может характеризоваться смещением якоря 301 по направлению ко второму и третьему соленоидам 304/305. Как показано на Фиг. 3, когда якорь 301 находится в первом аксиальном конечном положении, и третий соленоид 305 не запитан, пружина 307 может прижимать запорный якорь 306 по направлению якоря 301 таким образом, что запорный якорь 306 прижимает запорные шарики 308 в углубления в якоре 301 для предотвращения аксиального перемещения якоря 301. В случае, если третий соленоид 305 запитан, он может преодолеть силу пружины, прилагаемую пружиной 307 к запорному якорю 306, передвигая таким образом запорный якорь 306 от якоря 301. Это может вызывать разъединение запорных шариков 308 с якорем и позволить якорю 301 аксиально перемещаться внутри корпуса 302.
Первый и второй соленоиды 303/304 могут содержать катушки, отвечающие за передвижение якоря 301 между первым и вторым аксиальными положениями в случае разъединения запорного якоря 306 и запорных шариков 308. При возбуждении током, первый соленоид 303 может генерировать электромагнитное поле, взаимодействующее с первым участком 301а якоря 301 для приложения силы к якорю 301 по направлению первого соленоида 303. Эта сила может вызывать перемещение якоря 301 во второе аксиальное конечное положение, характеризующееся тем, что якорь 301 смещается в направлении первого соленоида 303. Положение первого участка 301а якоря 301 в исполнительном приводе 300 может характеризоваться расстоянием 320 между первым участком 301а якоря 301 и участком магнитной оболочки 309, близкой к первому соленоиду 301, что может соответствовать "воздушному зазору" между первым участком 301а якоря 301 и участком магнитной оболочки 309, приближенным к первому соленоиду 303. Напротив, в случае возбуждения током, второй соленоид 304 может генерировать электромагнитное поле, взаимодействующее со вторым участком 301б якоря 301 для приложения силы ко второму участку 301б якоря 301 по направлению второго соленоида 304. Положение второго участка 301б якоря 301 в исполнительном приводе 300 может характеризоваться расстоянием 322 между вторым участком 301б якоря 301 и участком магнитной оболочки 309 близкой ко второму соленоиду 304, что может соответствовать "воздушному зазору" между вторым участком 301б якоря 301 и участком магнитной оболочки 309, приближенным ко второму соленоиду 304.
В некоторых вариантах реализации изобретения второе аксиальное конечное положение якоря 301 может соответствовать "открытому" положению движимого элемента, присоединенного к якорю 301, а первое аксиальное конечное положение якоря может соответствовать "закрытому" положению. В этих вариантах реализации изобретения первый соленоид 303 может упоминаться как “нормально открытый” соленоид, отвечающий за смещение движимого элемента, присоединенного к якорю 301, в "открытое" положение, и второй соленоид 304 может упоминаться как “нормально закрытый” соленоид, отвечающий за смещение движимого элемента, присоединенного к якорю 301, в "закрытое" положение. Следует отметить, что запорный соленоид 305 может механически удерживать якорь 301 в первом аксиальном конечном положении или "закрытом" положении в проиллюстрированном варианте реализации изобретения, но может механически удерживать якорь 301 в "открытом" положении в других вариантах реализации изобретения. Подобным образом, функции “открыто” и “закрыто” соленоидов могут изменяться в зависимости от конструкции исполнительного привода 300 и движимого элемента, присоединенного к якорю 301. Дополнительно, конструкция исполнительного привода 300, показанная на Фиг. 3, не подразумевает каких-либо ограничений.
Подача питания на соленоиды 303-305 может включать выборочное присоединение соленоидов 303-305 к источнику питания. В телеметрической системе подача питания на соленоиды 303-305 может требовать сотен Ватт мощности из-за высокого дифференциального падения давления и малых времен приведения в действие, необходимых для импульсной телеметрии. Дифференциальное падение давления может составлять несколько тысяч фунтов на квадратный дюйм (psi) на движимый элемент, присоединенный к соленоидному исполнительному приводу 300, вызывая очень большое механическое трение, требующее большой силы приведения в действие на соленоидах 303-305. Малое время приведения в действие может требовать большой силы приведения в действие для преодоления инерции исполнительного привода в малых временных интервалах. Сила приведения в действие, необходимая на исполнительном приводе 300, положительно коррелируется с потреблением мощности соленоидами 303-305.
Обычные соленоиды не являются энергоэффективными и могут обеспечивать только около 50% преобразования энергии из электрической энергии в механическую силу. Остаток энергии преобразуется в тепло. Более конкретно, соленоиды вынуждены сохранять достаточное количество энергии для генерирования необходимой механической силы, и эта накопленная энергия в основном преобразуется в тепло и утрачивается при деактивации соленоида. Это тепло может повреждать чувствительные электронные компоненты, если не используется вторичная система охлаждения, такая как радиатор, или генерирование тепла не уменьшается ограничением частоты приведения в действие исполнительного привода, что, например, может негативно влиять на ширину полосы пропускания телеметрической системы, содержащей соленоид.
Дополнительно, типичные соленоиды запитываются током, близким к максимальному или максимальным для доступного источника питания, для приведения в действие исполнительного привода с как можно более высокой скоростью и большей силой. Во многих случаях, однако, как это будет подробно описано далее, этот ток является причиной работы соленоида за пределами эффективного рабочего диапазона, обостряя проблемы с теплом и эффективного использования доступной энергии. Генерируемая на отдельном соленоиде сила F может определяться, используя следующее выражение:

где K содержит константу, безразмерный коэффициент для конструкции исполнительного привода; I содержит электрический ток через соленоид; N содержит число витков соленоида; A содержит площадь участка воздушного зазора, перпендикулярного магнитному потоку соленоида; μ0 содержит проницаемость вакуума; μr содержит проницаемость магнита; l содержит длину магнитной цепи соленоида; и x содержит величину воздушного зазора между якорем и магнитной оболочкой и отображает положение якоря. Из переменных, перечисленных выше, все могут быть зафиксированы на основании конструкции исполнительного привода, за исключением относительной проницаемости μr, электрического тока I, и величины воздушного зазора x. Относительная проницаемость μr магнита негативно обратно пропорциональна току I, так что значение относительной проницаемости μr падает до значения 1 в случае, если соленоид насыщен при высоком токе. На основании вышеупомянутого сила F на соленоиде может считаться пропорциональной электрическому току I и обратно пропорциональной величине воздушного зазора x для входного тока на соленоиде, не насыщающем соленоид.
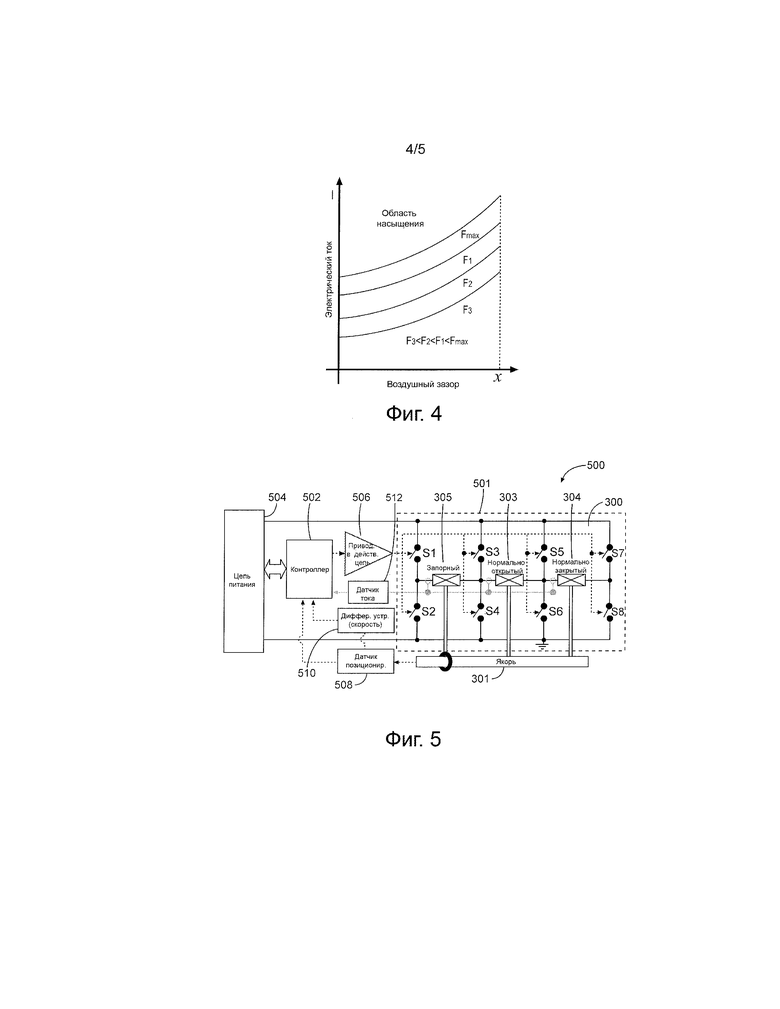
Фиг. 4 является блок-схемой, иллюстрирующей приведенную в качестве примера взаимосвязь между током I и величиной воздушного зазора x для генерирования силы F в соленоиде в соответствии с аспектами настоящего изобретения. В проиллюстрированном варианте реализации изобретения область между осью x и кривой линией, представляющей максимальную силу для соленоида Fmax, отображает желаемый режим работы, в котором входной ток недостаточен для магнитного насыщения соленоида. Максимальная сила для соленоида Fmax может содержать постоянное значение, основанное на взаимосвязи между электрическим током I и величиной воздушного зазора x и демонстрирует увеличение тока I, необходимого для генерирования Fmax по мере увеличения величины воздушного зазора x. Другие уровни силы (например, F1, F2, F3) являются результатом подобной взаимосвязи между электрическим током I и величиной воздушного зазора x, но с более низким током I. Область выше кривой линии Fmax, напротив, отображает насыщение соленоида, при котором относительная проницаемость μr падает до значения 1, и сила F ,генерируемая соленоидом, падает до нуля. Обычные соленоидные исполнительные приводы не обладают возможностью управления входным током для обеспечения ненасыщенности соленоида во время использования и, таким образом, часто работают в этой области насыщения в попытке увеличить силу, генерируемую соленоидом.
Более того, обычные соленоидные исполнительные приводы страдают от больших действующих сил, когда якорь контактирует с магнитной оболочкой в первом и втором аксиальных конечных положениях. Это происходит отчасти потому, что соленоиды однонаправлены по силе, то есть, если соленоид приведен в действие для передвижения якоря в другое положение, сила соленоида способна ускорит якорь по направлению к желаемому положению, но не способна затормозить якорь до его контакта с магнитной оболочкой или другой останавливающей поверхностью исполнительного привода. Этот контакт генерирует механические воздействующие сил, которые могут преждевременно повредить якорь и исполнительный привод в целом, особенно во внутрискважинной телеметрической системе, где высокая частота приведения в действие является необходимой.
В соответствии с аспектами настоящего изобретения система линейного соленоидного исполнительного привода с управлением с обратной связью может получать один или большее количество сигналов обратной связи от исполнительного привода и оптимизировать передвижение соленоидного исполнительного привода по меньшей мере частично основываясь на сигналах обратной связи. Такое управление с обратной связью может использоваться для увеличения энергоэффективности соленоидных исполнительных приводов, обеспечивая получение достаточного тока соленоидами для достижения максимальной силы без насыщения соленоидов, что, в свою очередь, может уменьшить энергию, накапливаемую в соленоидах, и привести к уменьшению генерируемого соленоидами тепла. Дополнительно, как будет подробно описано ниже, управление с обратной связью может также разрешать отслеживание положения якоря соленоида в режиме реального времени или в реальном времени, так что движение якоря может быть оптимизировано во избежание воздействия сил посредством управления в режиме реального времени или близком к режиму реального времени, параллельного управления соленоидами. Смягчение действующих сил может контролировать усталость материалов, замедлять механический износ и увеличивать срок службы и надежность соленоидного исполнительного привода.
Фиг. 5 представлена диаграммой, иллюстрирующей систему линейного исполнительного привода 500, содержащую исполнительный привод 300 в соответствии с аспектами настоящего изобретения. В проиллюстрированном варианте реализации изобретения система линейного исполнительного привода 500 содержит контроллер 502, присоединенный к цепи питания 504. Контроллер 502 может содержать процессор, такой как микропроцессор, микроконтроллер, цифровой сигнальный процессор (DSP), специализированная интегральная схема (ASIC), или любые другие цифровые или аналоговые схемы, выполненные с возможностью интерпретации и/или выполнения программных команд и/или обработки данных. Цепь питания 504 может содержать источник питания и/или цепь регулировки питания, реагирующую на сигналы управления от контроллера 502. Цепь питания 504 может подавать напряжение и ток на соленоиды 303 - 305 исполнительного привода 300 посредством приводящей в действие цепи 501.
В показанном варианте реализации изобретения приводящая в действие цепь 501 содержит множество переключателей S1-S8, которые могут использоваться для выборочного присоединения соленоидов 303 - 305 исполнительного привода 300 к цепи питания 504 соответственно. Переключатели S1-S8 могут содержать полупроводниковые переключатели, которые могут закрываться при приложении управляющего тока или напряжения. Примеры включают, но не ограничиваются канальными полевыми униполярными МОП-транзисторами (MOSEFT), полевыми транзисторами с затвором на основе перехода (“JEFT”) или биполярными транзисторами с изолированным затвором (IGBT). Аналогичные или механические переключатели также могут использоваться в рамках объема настоящего изобретения. В представленном варианте реализации изобретения, в наличии имеются четыре ветви между двумя клеммами цепи питания 504, каждая из которых содержит один верхний переключатель и один нижний переключатель, соединенные последовательно. Точка соединения верхнего и нижнего переключателей присоединена к одной клемме одного или двух соленоидов 303 - 305.
В проиллюстрированном варианте реализации изобретения контроллер 502 может выводить один или большее количество сигналов на переключатели S1-S8 посредством приводящей в действие цепи 506 для приведения в действие одного или большего количества соленоидов 303-305. В некоторых вариантах реализации изобретения процессор может соединяться с возможностью связи с памятью, также интегрированной с процессором или в отдельном запоминающем устройстве, и может быть настроен на интерпретацию и/или выполнение программных команд и/или данных, сохраненных в памяти, которые вызывают генерирование процессором сигналов управления посредством приводящей в действие цепи 506 для размыкания и замыкания переключателей S1-S8 в соответствии с предварительно определенной последовательностью. Если переключатели S1-S8 содержат канальные полевые униполярные МОП-транзисторы, например, сигнал управления, генерируемый контроллером 502, будет вызывать изменение приводящей в действие цепью 506 затворных напряжений переключателей S1-S8, так что выбранные переключатели S1-S8 размыкаются и замыкаются в заданное время для приведения в действие одного или большего количества соленоидов.
В показанном варианте реализации изобретения каждый из соленоидов 303-305 может быть приведен в действие замыканием одного верхнего и одного нижнего переключателей, принадлежащих к двум различным ветвям, присоединенных к соленоиду. Например, запорный соленоид 305 может быть приведен в действие замыканием верхнего переключателя S1 и нижнего переключателя S4 или верхнего переключателя S3 и нижнего переключателя S2. После приведения в действие соленоида, он может быть отключен от цепи питания 504 замыканием либо двух верхних переключателей, либо двух нижних переключателей из двух соединенных ветвей, и размыканием других переключателей этих ветвей, что позволяет соленоиду оставаться приведенным в действие благодаря сохраненной им энергии. Для разрядки или для приведения в бездействие соленоида два переключателя соединенных ветвей, противоположные переключателям, используемым в приведении в действие, могут быть замкнуты, позволяя сохраненной энергии быть повторно захваченной цепью питания 504 или повторно использованной для приведения в действие следующего соленоида. Например, если запорный соленоид 305 был приведен в действие замыканием переключателей S1 и S4, он может быть обесточен замыканием нижнего переключателя S2 и верхнего переключателя S3, противоположных верхнему переключателю S1 и нижнему переключателю S4 соответственно. Следует отметить, что перехват и повторное использование сохраненной энергии может уменьшить генерирование тепла соленоидным исполнительным приводом, уменьшить необходимость в отводе тепла внутри системы приведения в действие, уменьшить общее потребление мощности с возможностью использования менее мощного источника питания и потенциально увеличить частоту работы соленоидного исполнительного привода с возможностью улучшения способности передачи телеметрической системы, содержащей систему приведения соленоида в действие.
В соответствии с аспектами настоящего изобретения, контроллер 502 может получать по меньшей мере один сигнал обратной связи, соответствующий актуальному состоянию исполнительного привода 300. Актуальное состояние исполнительного привода 300 может включать, например, актуальное состояние по меньшей мере одного из соленоидов 303 - 305 и актуальное состояние якоря 301. В проиллюстрированном варианте реализации изобретения сигнал обратной связи содержит сигнал, соответствующий положению якоря 301 в исполнительном приводе 300, и сигнал, соответствующий уровню тока, подаваемого на соленоиды 303 - 305 от цепи питания 504. Сигнал положения может быть получен контроллером 502 от датчика позиционирования 508, присоединенного к якорю 301 исполнительного привода 300. Примерные датчики позиционирования включают, но без ограничения, датчики Холла, емкостные датчики, индуктивные датчики, кодеры и т. д. Выходной сигнал датчика 508 может быть получен контроллером 502 и дифференцирующим устройством 510, которое может определять и выводить на контроллер 502 скорость якоря 301. Сигнал тока может быть получен контроллером 502 от датчика тока 512, присоединенного к цепи питания 504, примеры которого включают датчики Холла, датчики магнитострикции и любые другие датчики, что будет оценено специалистом в данной области с учетом настоящего описания.
В соответствии с аспектами настоящего изобретения, контроллер 502 может генерировать один или большее количество сигналов управления, основанных по меньшей мере частично на сигналах обратной связи. Эти сигналы управления могут содержать, например, сигналы управления для приводящей в действие цепи 506, влияющие на уровни заряда/разряда соленоидов 303-305 посредством изменения состояний по меньшей мере некоторых из переключателей, что может включать выборочное размыкание и замыкание некоторых или всех переключателей. В некоторых вариантах реализации изобретения сигналы управления из контроллера 502 могут генерироваться по меньшей мере частично основываясь на предварительно определенных взаимосвязях между величинами воздушного зазора в исполнительном приводе 300 и уровнем тока в соленоидах 303 и 304. Эта предварительно определенная взаимосвязь может включать, например, взаимосвязь подобную той, которая проиллюстрирована выше со ссылкой на Фиг. 4.
В некоторых вариантах реализации изобретения контроллер 502 может содержать предварительно рассчитанные справочные таблицы или другие алгоритмы, посредством которых контроллер 502 может генерировать и выводить сигналы управления основываясь на полученных сигналах обратной связи. Например, справочная таблица может генерироваться для конкретной конструкции соленоида на основании максимальной силы для соленоида Fmax, которая может соответствовать наиболее быстрому передвижению штока якоря из одного положения в соленоиде в другое. Справочная таблица может содержать вводные данные, которые связывают дискретные величины воздушного зазора с соответствующими целевыми токами управления I, определенными посредством использования таблицы, подобной той, которая показана на Фиг. 4. В некоторых вариантах реализации изобретения контроллер 502 может получать сигналы обратной связи в форме сигнала позиционирования якоря 301, и контроллер 502 может вычислять величину воздушного зазора x на основании сигнала позиционирования и определять целевой ток соленоида I по справочной таблице. Затем контроллер 502 может сравнивать актуальный ток соленоида I, который может определяться посредством сигнала обратной связи об уровне тока, с целевым током соленоида I, и генерировать необходимый сигнал управления, если две величины различаются. Альтернативно, справочная таблица может содержать предварительно определенные сигналы управления, связанные с целевым током управления I, который может выбираться и вводиться контроллером автоматически или, при необходимости, для изменения работы соленоида. Альтернативно или дополнительно, сигнал позиционирования, соответствующий текущему положению якоря 301, может сравниваться контроллером 502 с желаемым положением якоря 301 для определения, какие из соленоидов следует зарядить и/или разрядить во время перемещения штока якоря.
Фиг. 6 является графиком, иллюстрирующим скорость 660, силу 670 и ток 680 исполнительного привода примера системы внутрискважинного линейного соленоидного исполнительного привода по мере того, как соответствующий якорь перемещается из "закрытого" положения 652,соответствующего нормально закрытому соленоиду, в "открытое" положение 654, соответствующее нормально открытому соленоиду, в соответствии с аспектами настоящего изобретения. Для начала перемещения якоря в направлении открытого положения 654, контроллер системы внутрискважинного соленоидного линейного исполнительного привода может сначала подать питание на нормально открытый соленоид, как показано пиком 601 тока 680. Нормально открытый соленоид запитывается, пока сила 670 не достигнет своего максимального значения 602 на нормально открытом соленоиде. В некоторых вариантах реализации телеметрических систем, в которых может быть необходима высокая частота приведения в действие, нормально открытый соленоид может быть запитан так быстро, как это возможно, до получения максимальной силы 602. Как описано выше, входной ток 680 на нормально открытый соленоид может определяться по меньшей мере частично основываясь на положении якоря и данных справочной таблицы на контроллере. Более конкретно, по мере воздействия силы 670 на якорь, он ускоряется в направлении нормально открытого соленоида, что вызывает соответствующее уменьшение размера воздушного зазора между якорем и нормально открытым соленоидом, что, в свою очередь, уменьшает входной ток, необходимый для обеспечения максимальной силы 602.
В проиллюстрированном варианте реализации изобретения максимальная сила 602 поддерживается пока скорость 660 якоря не достигнет своего максимума 603 в предварительно определенном положении 690. При достижении якорем своей максимальной скорости якорь может быть приостановлен так, чтобы скорость 660 якоря упала практически до нуля при достижении им открытого положения 654. Это может обеспечивать тот факт, что якорь не подвергается воздействию сил от удара об нормально открытый соленоид при достижении им открытого положения 654. В показанном варианте реализации изобретения якорь приостанавливается при обесточивании нормально открытого соленоида, как показано током 680, падающим до нуля, и подачей питания нормально закрытого соленоида до момента достижения нормально закрытым соленоидом своей максимальной силы 605 на якоре в направлении, противоположном движению якоря, как показано участком тока 604. В некоторых вариантах реализации изобретения может быть необходимо подавать питание на нормально закрытый соленоид так быстро, как только возможно, до тех пор, пока максимальная сила 605 не будет действовать на якорь. Ток 680, подаваемый на нормально закрытый соленоид, может управляться контроллером посредством использования справочной таблицы, как описано выше, основываясь на сигнале обратной связи, указывающем на положение якоря. Как можно увидеть, кривизна тока, используемого для подачи питания нормально закрытого соленоида, противоположна по форме тока, используемого для подачи питания нормально открытого соленоида, поскольку воздушный зазор между якорем и нормально зарытым соленоидом увеличивается по мере движения якоря к нормально открытому соленоиду, поэтому ток, используемый для питания нормально закрытого соленоида, должен увеличиваться по мере движения якоря для поддержания максимальной силы 605. По мере приближения якоря к открытому положению 654, нормально закрытый соленоид может обесточиваться, как показано током 680, падающим до нуля, чтобы якорь остался в открытом положении 654. В общем, процесс может быть обращен для возвращения якоря в закрытое положение 652.
Контроллер системы исполнительного привода соответствующий Фиг. 6 может определять момент подачи питания и обесточивания нормально открытых и нормально закрытых соленоидов по меньшей мере частично основываясь на сигнале обратной связи, содержащем данные о положении якоря и/или скорости якоря. Контроллер может определить, например, что якорь нуждается в перемещении в открытое положение 654, определив, что якорь в текущий момент находится в закрытом положении 652 и в соответствии с этим может подать один или большее количество сигналов управления на источник питания/приводящую в действие цепь для обеспечения подачи тока 601 на нормально открытый соленоид. Таким же образом контроллер может определить, что якорь должен быть замедлен, определив посредством сигнала обратной связи момент достижения якорем положения 690 или момент достижения якорем своей максимальной скорости 603, и в соответствии с этим определением может сгенерировать один или большее количество сигналов управления для источника питания/приводящей в действие цепи для отключения нормально открытого соленоида от источника питания и для обеспечения тока 670 на нормально закрытый соленоид. Таким же образом контроллер может определить момент приближения якоря в открытое положение по меньшей мере частично основываясь на сигнале обратной связи и в соответствии с этим определением может генерировать один или большее количество сигналов управления на источник питания/приводящей в действие цепи для отключения нормально закрытого соленоида.
Примерное устройство, воплощающее аспекты настоящего изобретения, может содержать соленоидный исполнительный привод с соленоидом и соответствующим якорем соленоида. К соленоиду может быть присоединено множество переключателей. Контроллер может быть электрически присоединен к множеству переключателей, при этом контроллер имеет процессор и запоминающее устройство, связанное с процессором. Запоминающее устройство может содержать набор команд, которые при выполнении процессором вызывают получение процессором сигнала обратной связи, соответствующего состоянию по меньшей мере одного из: соленоида и якоря соленоида; и генерирование сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих параграфах, устройство дополнительно содержит по меньшей мере один датчик, присоединенный к якорю соленоида, и датчик, присоединенный по меньшей мере к одному из множества переключателей. В одном или большем количестве вариантов реализации изобретения датчик, который может быть присоединен к якорю соленоида, содержит по меньшей мере одно из: датчик позиционирования, емкостный датчик, индуктивный датчик и кодирующие устройства; и датчик, который может быть присоединен по меньшей мере к одному из множества переключателей, содержит по меньшей мере одно из: датчик Холла и датчик магнитострикции.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих двух параграфах, сигнал обратной связи, соответствующий состоянию по меньшей мере одного соленоида и якоря соленоида, может содержать по меньшей мере одно из: сигнал, соответствующий положению якоря, и сигнал, соответствующей уровню тока соленоида на данный момент.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих параграфах, набор команд, вызывающий генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно вызывает вычисление процессором величины воздушного зазора, соответствующей положению якоря. В некоторых вариантах реализации изобретения набор команд, вызывающий генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно вызывает определение процессором целевого уровня тока соленоида по меньшей мере частично основываясь на рассчитанной величине воздушного зазора. В некоторых вариантах реализации изобретения набор команд, вызывающий определение процессором целевого уровня тока соленоида по меньшей мере частично основываясь на рассчитанной величине воздушного зазора, дополнительно вызывает определение процессором целевого уровня тока посредством использования справочной таблицы. В некоторых вариантах реализации изобретения набор команд, вызывающий генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно вызывает сравнение процессором целевого уровня тока с уровнем тока на данный момент и генерирование сигнала управления по меньшей мере частично основываясь на результатах сравнения.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих двух параграфах, устройство дополнительно содержит другой соленоид и соответствующий якорь соленоида; при этом другой соленоид присоединен по меньшей мере к нескольким из множества переключателей; причем набор команд, вызывающий генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно вызывает генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей для заряда одного из: соленоида и другого соленоида и разряда другого одного из: соленоида и другого соленоида по меньшей мере частично основываясь на сигнале, соответствующем положению по меньшей мере одного якоря и другого якоря. В некоторых вариантах реализации изобретения соленоидный исполнительный привод содержит линейный исполнительный привод.
Примерный способ, включающий аспекты настоящего изобретения, может включать этап, на котором генерируют сигнал управления по меньшей мере для одного из множества переключателей, присоединенных к соленоиду соленоидного исполнительного привода, причем соленоидный исполнительный привод содержит якорь соленоида, соответствующий соленоиду. Может приниматься сигнал обратной связи, соответствующий состоянию по меньшей мере одного из соленоидов и якоря соленоида. Другой сигнал управления может генерироваться для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих параграфах, соленоидный исполнительный привод дополнительно содержит по меньшей мере один датчик, присоединенный к якорю соленоида, и датчик, присоединенный по меньшей мере к одному из множества переключателей. В некоторых вариантах реализации изобретения датчик, присоединенный к якорю соленоида, содержит по меньшей мере одно из: датчик позиционирования, емкостный датчик, индуктивный датчик и кодирующие устройства; и датчик, присоединенный по меньшей мере к одному из множества переключателей, содержит по меньшей мере одно из: датчик Холла и датчик магнитострикции.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих двух параграфах, поучение сигнала обратной связи, соответствующего состоянию по меньшей мере одного соленоида и якоря соленоида, дополнительно включает получение по меньшей мере одного из: сигнала, соответствующего положению якоря, и сигнала, соответствующего уровню тока соленоида на данный момент. В некоторых вариантах реализации изобретения генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно включает расчет величины воздушного зазора, соответствующего положению якоря. В некоторых вариантах реализации изобретения генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно включает определение целевого уровня тока соленоида по меньшей мере частично основываясь на рассчитанной величине воздушного зазора. В некоторых вариантах реализации изобретения определение целевого уровня тока соленоида основанное по меньшей мере частично на рассчитанной величине воздушного зазора, дополнительно включает определение целевого уровня тока посредством использования справочной таблицы. В некоторых вариантах реализации изобретения генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основываясь на полученном сигнале обратной связи, дополнительно включает сравнение целевого уровня тока с уровнем тока на данный момент и генерирование сигнала управления по меньшей мере частично основанном на результатах сравнения.
В одном или большем количестве вариантов реализации изобретения, описанных в предшествующих двух параграфах, соленоидный исполнительный привод дополнительно содержит другой соленоид и соответствующий якорь соленоида; при этом другой соленоид присоединен по меньшей мере к нескольким из множества переключателей; причем генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей по меньшей мере частично основано на полученном сигнале обратной связи, дополнительно включает генерирование сигнала управления для изменения состояния по меньшей мере одного из множества переключателей для заряда одного из: соленоида и другого соленоида и разряда другого одного из: соленоида и другого соленоида по меньшей мере частично основываясь на сигнале, соответствующем положению по меньшей мере одного якоря и другого якоря. В некоторых вариантах реализации изобретения способ по п. 19 отличается тем, что соленоидный исполнительный привод содержит линейный исполнительный привод.
Следовательно, настоящее изобретение хорошо приспособлено для достижения описанных и свойственных результатов и преимуществ. Частные варианты реализации, описанные ранее, являются иллюстративными, так как настоящее изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, имеющим возможность ознакомления с настоящим описанием. Кроме того, описанные в контексте настоящего изобретения подробности конструкции или дизайна не предполагают ограничения, за исключением описанных ниже в формуле изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты реализации изобретения, раскрытые выше, могут быть изменены или модифицированы, и все такие изменения находятся в пределах объема и сущности настоящего изобретения. Кроме того, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Под использованной в формуле изобретения формой единственного числа следует понимать один или большее количество элементов.
Изобретение относится к электротехнике. Технический результат состоит в повышении надежности. Система внутрискваженного линейного соленоидного исполнительного привода содержит соленоидный исполнительный привод с соленоидом и соответствующим якорем соленоида. К соленоиду присоединено множество переключателей. Контроллер электрически присоединен к множеству переключателей и имеет процессор и запоминающее устройство, связанное с процессором. Запоминающее устройство содержит набор команд, которые при выполнении процессором вызывают получение процессором сигнала обратной связи, соответствующего состоянию по меньшей мере одного из: соленоида и якоря соленоида; и генерирование сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи. 2 н. и 18 з.п. ф-лы, 6 ил.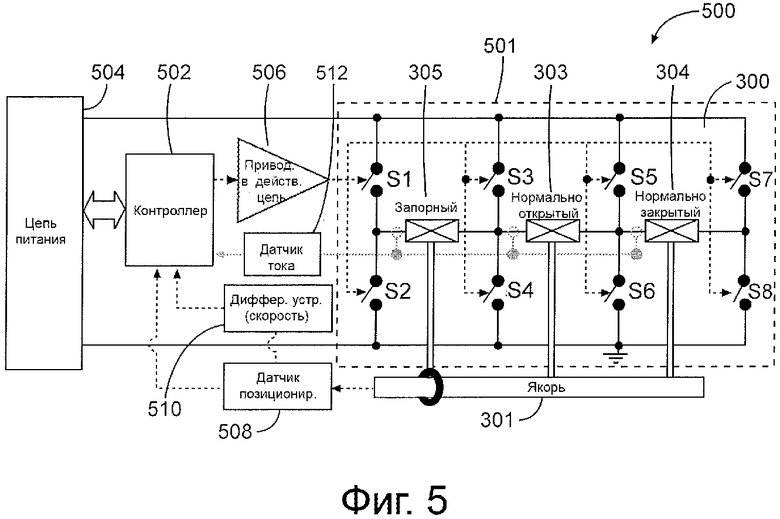
1. Система внутрискважинного линейного соленоидного исполнительного привода, содержащая:
соленоидный исполнительный привод с множеством соленоидов и соответствующим якорем соленоида;
множество переключателей, присоединенных к указанному множеству соленоидов;
контроллер, электрически присоединенный к множеству переключателей, при этом контроллер содержит процессор и запоминающее устройство, присоединенное к процессору, причем устройство памяти содержит набор команд, которые при выполнении процессором вызывают:
получение сигнала обратной связи, соответствующего состоянию по меньшей мере одного соленоида из указанного множества соленоидов и/или состоянию якоря соленоида; и
генерирование сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи.
2. Система по п. 1, которая дополнительно содержит по меньшей мере одно из: датчик, присоединенный к якорю соленоида, и датчик, присоединенный по меньшей мере к одному из множества переключателей.
3. Система по п. 2, отличающаяся тем, что
датчик, присоединенный к якорю соленоида, содержит по меньшей мере одно из: датчик позиционирования, емкостный датчик, индуктивный датчик и кодирующие устройства; и
датчик, присоединенный по меньшей мере к одному из множества переключателей, содержит по меньшей мере одно из: датчик Холла и датчик магнитострикции.
4. Система по любому из пп. 1-3, отличающаяся тем, что сигнал обратной связи, соответствующий состоянию по меньшей мере одного соленоида из указанного множества соленоидов и/или состоянию якоря соленоида, содержит по меньшей мере одно из: сигнал, соответствующий положению якоря, и сигнал, соответствующий уровню тока одного из соленоидов на данный момент.
5. Система по п. 4, в которой набор команд, вызывающих генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно вызывает вычисление процессором величины воздушного зазора, соответствующего положению якоря.
6. Система по п. 5, в которой набор команд, вызывающих генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно вызывает определение процессором целевого уровня тока соленоида, основанного по меньшей мере частично на рассчитанной величине воздушного зазора.
7. Система по п. 6, в которой набор команд, вызывающий определение процессором целевого уровня тока соленоида, основанного по меньшей мере частично на рассчитанной величине воздушного зазора, дополнительно вызывает определение процессором целевого уровня тока с использованием справочной таблицы.
8. Система по п. 6, в которой набор команд, вызывающий генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно вызывает сравнение процессором целевого уровня тока с уровнем тока на данный момент и генерирование сигнала управления, основанного по меньшей мере частично на результатах сравнения.
9. Система по п. 4, дополнительно содержащая другой соленоид и соответствующий ему другой якорь соленоида;
причем этот другой соленоид присоединен по меньшей мере к некоторым из множества переключателей;
при этом набор команд, вызывающий генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно вызывает генерирование процессором сигнала управления для изменения состояния по меньшей мере одного из множества переключателей для заряда одного из пары: один соленоид из указанной группы соленоидов и указанный другой соленоид, и для разряда другого одного из пары: один соленоид из указанного множества соленоидов и указанный другой соленоид, основанного по меньшей мере частично на сигнале, соответствующем положению по меньшей мере одного якоря и другого якоря.
10. Система по п. 9, отличающаяся тем, что соленоидный исполнительный привод содержит линейный исполнительный привод.
11. Способ управления системой внутрискважинного линейного соленоидного исполнительного привода, включающий в себя этапы, на которых:
генерируют сигнал управления по меньшей мере для одного из множества переключателей, присоединенных к множеству соленоидов соленоидного исполнительного привода, причем соленоидный исполнительный привод содержит якорь соленоида, соответствующий указанному множеству соленоидов;
получают сигнал обратной связи, соответствующий состоянию по меньшей мере одного соленоида из указанного множества соленоидов и/или состоянию якоря соленоида; и
генерируют другой сигнал управления для изменения состояния по меньшей мере одного из множества переключателей, основанный по меньшей мере частично на полученном сигнале обратной связи.
12. Способ по п. 11, отличающийся тем, что соленоидный исполнительный привод дополнительно содержит по меньшей мере одно из: датчик, присоединенный к соленоидному якорю, и датчик, присоединенный по меньшей мере к одному из множества переключателей.
13. Способ по п. 12, отличающийся тем, что:
датчик, присоединенный к якорю соленоида, содержит по меньшей мере одно из: датчик позиционирования, емкостный датчик, индуктивный датчик и кодирующие устройства; и
датчик, присоединенный по меньшей мере к одному из множества переключателей, содержит по меньшей мере одно из: датчик Холла и датчик магнитострикции.
14. Способ по любому из пп. 11-13, в котором получение сигнала обратной связи, соответствующего состоянию по меньшей мере одного соленоида из указанного множества соленоидов и/или состоянию якоря соленоида, дополнительно включает получение по меньшей мере одного из: сигнала, соответствующего положению якоря, и сигнала, соответствующего уровню тока в одном из соленоидов на данный момент.
15. Способ по п. 14, в котором генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно включает расчет величины воздушного зазора, соответствующего положению якоря.
16. Способ по п. 15, в котором генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно включает определение целевого уровня тока соленоида, основанного по меньшей мере частично на рассчитанной величине воздушного зазора.
17. Способ по п. 16, в котором определение целевого уровня тока соленоида, основанного по меньшей мере частично на рассчитанной величине воздушного зазора, дополнительно включает определение целевого уровня тока с использованием справочной таблицы.
18. Способ по п. 16, в котором генерирование другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно включает сравнение целевого уровня тока с уровнем тока на данный момент, и генерирование сигнала управления, основанного по меньшей мере частично на результатах сравнения.
19. Способ по п. 14, в котором:
соленоидный исполнительный привод дополнительно содержит другой соленоид и соответствующий ему другой якорь соленоида;
причем указанный другой соленоид присоединен по меньшей мере к некоторым из множества переключателей;
при этом этап генерирования другого сигнала управления для изменения состояния по меньшей мере одного из множества переключателей, основанного по меньшей мере частично на полученном сигнале обратной связи, дополнительно включает генерирование сигнала управления для изменения состояния по меньшей мере одного из множества переключателей для заряда одного из пары: один соленоид из указанного множества соленоидов и указанный другой соленоид, и для разряда другого одного из пары: один соленоид из указанного множества соленоидов и указанный другой соленоид, основанного по меньшей мере частично на сигнале, соответствующем положению по меньшей мере одного из: якоря и другого якоря.
20. Способ по п. 19, отличающийся тем, что соленоидный исполнительный привод содержит линейный исполнительный привод.
| US 20100148755 A1, 17.06.2010 | |||
| US 20100198538 A1, 05.08.2010 | |||
| US 20100127807 A1, 27.05.2010 | |||
| US 20090107682 A1, 30.04.2009 | |||
| ДИАГНОСТИКА ТЕХНОЛОГИЧЕСКОГО УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ СИГНАЛА ДАТЧИКА ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 2004 |
|
RU2325685C2 |

