УРОВЕНЬ ТЕХНИКИ
[0001] Варианты осуществления настоящего изобретения относятся к системе извлечения флюида и в частности к системе извлечения флюида, имеющей подсистему управления для управления множеством электрических машин.
[0002] В операциях по добыче газа и/или нефти электрическая машина, например электрический погружной насос (ЭПН), используется для извлечения скважинных флюидов, например нефти и/или газа, из скважины. ЭПН может быть расположен в скважине для извлечения нефти и/или газа. Традиционно для управления эксплуатационным параметром, таким как рабочая скорость ЭПН, используется частотно-регулируемый привод (ЧРП), получающий питание от источника переменного тока с фиксированной частотой. ЧРП синтезирует трехфазные напряжения переменного тока и переменные токи такой частоты, которые необходимы для возбуждения ЭПН таким образом, чтобы этот ЭПН работал нужным образом.
[0003] В частности, ЧРП и источник питания переменного тока, как правило, располагаются на поверхности (например, вне скважины), и трехфазное электропитание переменного тока подается в скважину к ЭПН по длинному кабелю, который проходит от поверхности к местоположению внутри скважины, где размещается ЭПН. Подача переменного тока в скважину, как правило, очень дорога, так как необходимо большее количество проводников для подачи трехфазного электропитания переменного тока, по сравнению с проводниками, требуемыми для подачи электропитания постоянного тока.
[0004] Для повышенной продуктивности скважины желательно иметь множество электрических погружных насосов в пределах одной и той же скважины, каждый из которых работает со своей скоростью. Соответственно, скважина может быть сформирована таким образом, чтобы иметь одну или более вертикальных секций и горизонтальных секций. Один или более электрических погружных насосов могут использоваться в каждой из вертикальных секций и горизонтальных секций. Соответственно, если используется вышеупомянутый традиционный подход, конкретный ЧРП может потребоваться для каждого ЭПН из одного или более электрических погружных насосов. Кроме того, отдельный силовой кабель (содержащий по меньшей мере три проводника для трехфазного электропитания переменного тока) необходим для подачи трехфазного электропитания переменного тока каждому ЭПН. Соответственно, применение такого подхода не является экономически эффективным.
[0005] В другом традиционном подходе общий ЧРП используется для управления работой множества электрических погружных насосов. Однако при такой схеме расположения все электрические погружные насосы должны управляться при одной и той же скорости. Маловероятно, чтобы это оптимизировало производительность скважины.
[0006] В еще одном традиционном подходе на поверхности используется единственный ЧРП, который подает электропитание переменного тока первому ЭПН в скважине с последующей подачей электропитания электрическим погружным насосам с помощью контроллеров, находящихся в скважине. Эти контроллеры должны функционировать как циклоконверторы, которые принимают переменный ток одной частоты и амплитуды и преобразуют в другой переменный ток другой частоты и амплитуды для возбуждения каждого дополнительного ЭПН в скважине. Однако использование таких электронных контроллеров может оказаться ненадежным в тяжелых условиях эксплуатации внутри скважины. Кроме того, управление скоростью работы ЭПН независимо от работы других электрических погружных насосов является еще одной проблемой.
КРАТКОЕ ОПИСАНИЕ
[0007] В соответствии с аспектами настоящего описания предлагается подсистема управления для управления электрической машиной. Подсистема управления содержит блок управления сдвигом по фазе, выполненный с возможностью принимать электрический сигнал, характеризующий угловое положение ротора электрической машины, от по меньшей мере одного датчика положения ротора электрической машины. Блок управления сдвигом по фазе дополнительно выполнен с возможностью генерировать сдвинутый по фазе электрический сигнал посредством применения сдвига по фазе к электрическому сигналу, где величина сдвига по фазе определяется на основе по меньшей мере сигнала управления скоростью вращения, указывающий заранее заданную скорость вращения ротора. Кроме того, блок управления сдвигом по фазе выполнен с возможностью генерировать командный сигнал фазы на основе сдвинутого по фазе электрического сигнала. Подсистема управления также содержит блок переключения, электрически соединенный с блоком управления сдвигом по фазе и выполненный с возможностью управлять подводом тока фазы к одной или более фазных обмоток из множества фазных обмоток электрической машины на основе командного сигнала фазы таким образом, что ротор работает с заранее заданной скоростью вращения.
[0008] В соответствии с другим аспектом настоящего описания предлагается система извлечения флюида. Система извлечения флюида содержит шину постоянного тока. Система извлечения флюида дополнительно содержит множество подсистем извлечения флюида, выполненных с возможностью электрического подключения к шине постоянного тока, где по меньшей мере одна подсистема извлечения флюида из множества подсистем извлечения флюида содержит электрическую машину, выполненную с возможностью оказывать помощь в извлечения флюида из скважины, где электрическая машина включает по меньшей мере множество фазных обмоток и ротор. Упомянутая по меньшей мере одна подсистема извлечения флюида дополнительно содержит подсистему управления, электрически соединенную с электрической машиной и выполненную с возможностью управлять скоростью вращения ротора путем избирательного управления подачей фазного тока от шины постоянного тока к одной или более из множества фазных обмоток таким образом, что скорость вращения ротора электрической машины отличается от скорости вращения ротора другой электрической машины в по меньшей мере одной из других подсистем извлечения флюида из множества подсистем извлечения флюида.
[0009] В соответствии с еще одним аспектом настоящего описания предлагается способ управления рабочими скоростями электрических машин в множестве подсистем извлечения флюида, соединенных с шиной постоянного тока для получения напряжения постоянного тока. Способ включает определение желаемой рабочей скорости электрической машины для каждой из множества подсистем извлечения флюида. Способ дополнительно включает определение максимальной рабочей скорости из определенных желаемых рабочих скоростей. Кроме того, способ включает регулировку величины напряжения постоянного тока на шине постоянного тока на основе максимальной рабочей скорости таким образом, что по меньшей мере одна электрическая машина из электрических машин могла работать при максимальной рабочей скорости. Кроме того, способ также включает генерирование сигнала управления скоростью на основе желаемой рабочей скорости каждой электрической машины и желаемой величины сдвига по фазе в соответствии с желаемой рабочей скоростью каждой электрической машины для каждой из множества подсистем извлечения флюида. Кроме того, способ включает передачу сигнала управления скоростью к множеству подсистем извлечения флюида таким образом, что электрическая машина каждой из множества подсистем извлечения флюида может работать при соответствующей желаемой рабочей скорости.
[0010] В соответствии с еще одним аспектом настоящего описания предлагается способ управления электрической машиной. Способ включает прием электрического сигнала, указывающего угловое положение ротора электрической машины, от по меньшей мере одного датчика положения ротора. Способ дополнительно включает генерирование сдвинутого по фазе электрического сигнала путем применения сдвига по фазе к электрическому сигналу, где величина сдвига по фазе определяется на основе по меньшей мере сигнала управления скоростью, указывающего заранее заданную скорость вращения ротора. Кроме того, способ включает генерирование командного сигнала фазы на основе сдвинутого по фазе электрического сигнала. Способ также включает избирательную подачу тока фазы в одну или более из множества фазных обмоток на основе командного сигнала фазы таким образом, что ротор работает при заранее заданной скорости вращения.
ЧЕРТЕЖИ
[0011] Эти и другие признаки, особенности и преимущества настоящего описания будут более понятны после прочтения последующего подробного описания со ссылкой на прилагаемые чертежи, на которых одинаковые символы представляют одинаковые детали на всех чертежах, где:
[0012] Фиг. 1 представляет схематическое изображение системы извлечения флюида в соответствии с аспектами настоящего описания;
[0013] Фиг. 2 представляет графическое изображение примера зависимости между напряжением постоянного тока и рабочей скоростью электрической машины в соответствии с аспектами настоящего описания;
[0014] Фиг. 3 представляет схематическое изображение подсистемы извлечения флюида в соответствии с аспектами настоящего описания;
[0015] Фиг. 4А-4С представляют графические изображения примеров электрических сигналов, генерируемых датчиками положения ротора, в соответствии с аспектами настоящего описания;
[0016] Фиг. 5А-5С представляют графические изображения примеров сдвинутых по фазе электрических сигналов в соответствии с аспектами настоящего описания;
[0017] Фиг. 6 представляет графическое изображение примера зависимости между сдвигом по фазе и рабочей скоростью электрической машины в соответствии с аспектами настоящего описания;
[0018] Фиг. 7 представляет блок-схему примера способа управления рабочими скоростями электрических машин в подсистемах извлечения флюида в соответствии с аспектами настоящего описания;
[0019] Фиг. 8 представляет блок-схему примера способа генерирования сигнала управления скоростью в соответствии с аспектами настоящего описания; и
[0020] Фиг. 9 представляет блок-схему примера способа управления электрической машиной в соответствии с аспектами настоящего описания.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Описание может быть лучше понято со ссылками на чертежи и подробное описание, приведенные в настоящем документе. Различные варианты осуществления далее описаны в настоящем документе со ссылкой на чертежи. Однако специалистам в данной области техники понятно, что подробное описание, приведенное в настоящем документе в отношении этих чертежей, представлено для целей разъяснения, так как способ и система могут выходить за рамки описанных вариантов осуществления.
[0022] В последующем описании единственные формы включают объекты во множественном числе, если контекст явно не указывает на обратное. Используемый в данном документе термин «или» не предназначен для того, чтобы быть исключающим, и относится к по меньшей мере одному из компонентов, которые присутствуют, а также включает примеры, в которых может присутствовать комбинация этих компонентов, если контекст явно не указывает на обратное.
[0023] В данном описании термины «может» и «может быть» указывают на возможность события в пределах ряда обстоятельств; обладания выделенных свойства, характеристики или функции; и/или квалифицируют глагол путем выражения одного или более из: возможность, способность или вероятность, связанные с квалифицируемым глаголом. Соответственно, использование «может» и «может быть» указывает на то, что модифицированный термин, по всей видимости, является подходящим, способным или пригодным для указанных качества, функции или применения, в то же время учитывая то, что в некоторых обстоятельствах модифицированный термин может иногда оказаться не подходящим, не способным или не пригодным.
[0024] В соответствии с некоторыми аспектами настоящего описания предлагается система извлечения флюида. Система извлечения флюида содержит шину постоянного тока (DC) и множество подсистем извлечения флюида, расположенных в скважине и электрически соединенных с шиной постоянного тока. По меньшей мере одна подсистема извлечения флюида из множества подсистем извлечения флюида содержит электрическую машину, выполненную с возможностью оказывать помощь в извлечения флюида из скважины, где электрическая машины имеет по меньшей мере множество фазных обмоток и ротор. Эта по меньшей мере одна подсистема извлечения флюида дополнительно включает подсистему управления, электрически соединенную с электрической машиной и выполненную с возможностью управлять скоростью вращения ротора путем избирательного управления подачей тока фазы из шины постоянного тока в одну или более из множества фазных обмоток таким образом, что скорость вращения ротора электрической машины отличается от скорости вращения ротора другой электрической машины одной или более (по меньшей мере одной) другой подсистемы извлечения флюида из множества подсистем извлечения флюида.
[0025] В некоторых вариантах осуществления подсистема управления содержит блок управления сдвигом по фазе, выполненный с возможностью принимать электрический сигнал, указывающий угловое положение ротора, от по меньшей мере одного датчика положения ротора. Блок управления сдвигом по фазе дополнительно выполнен с возможностью генерировать сдвинутый по фазе электрический сигнал посредством применения сдвига по фазе к электрическому сигналу, где величину сдвига по фазе определяют на основе по меньшей мере сигнала управления скоростью, указывающего заранее заданную скорость вращения ротора. Кроме того, блок управления сдвигом по фазе также выполнен с возможностью генерировать командный сигнал фазы на основе сдвинутого по фазе электрического сигнала. Подсистема управления дополнительно содержит блок переключения, электрически соединенный с блоком управления сдвигом по фазе и выполненный с возможностью управлять подачей тока фазы на одну или более из множества фазных обмоток на основе командного сигнала фазы таким образом, что ротор работает при заранее заданной скорости вращения.
[0026] Фиг. 1 представляет схематическое изображение системы 100 извлечения флюида в соответствии с аспектами настоящего описания. В одном варианте осуществления система 100 извлечения флюида может быть использована для извлечения флюида из скважины 102. Примеры флюида могут включать, но не ограничены этим, воду, природный газ, нефтепродукты, такие как нефть, и тому подобное. В некоторых вариантах осуществления, в зависимости от источника флюида, скважина 102 может быть сформирована из одной или более вертикальных секций, таких как вертикальная секция 104, и/или второй горизонтальной секции 108. В некоторых вариантах осуществления система 100 извлечения флюида может содержать один или более источников 112 питания, силовой преобразователь 114, шину 116 постоянного тока, множество подсистем 118 извлечения флюида и контроллер 120.
[0027] Источник 112 питания может представлять систему выработки и/или распределения электроэнергии, выполненную с возможностью генерировать и/или распределять переменный ток (АС) или постоянный ток (DC). В качестве примера источник 112 питания может представлять собой систему выработки и/или распределения переменного тока, систему выработки и/или распределения высокого напряжения на постоянном токе (high voltage DC) (HVDC), систему выработки и/или распределения среднего напряжения на постоянном токе (medium voltage DC) (MVDC), солнечную энергетическую установку, ветровую энергетическую установку, накопители энергии, такие как аккумуляторы, и т.п.Силовым преобразователем 114 может быть преобразователь переменного тока в постоянный ток или преобразователь постоянного тока в постоянный ток.
[0028] В некоторых вариантах осуществления шина 116 постоянного тока может быть включена между силовым преобразователем 114 и множеством подсистем 118 извлечения флюида. Шина 116 постоянного тока может содействовать передаче электроэнергии от источника 112 питания к множеству подсистем 118 извлечения флюида. Шина 116 постоянного тока может включать два проводника - один проводник для подачи положительного тока и второй проводник для подачи отрицательного тока - от силового преобразователя 114 к множеству подсистем 118 извлечения флюида. Преимущество передачи постоянного тока к множеству подсистем 118 извлечения флюида в скважине 102 состоит в том, что в результате сокращается общая стоимость системы 100 извлечения флюида по сравнению с передачей переменного тока к подсистемам 118 извлечения флюида в скважине 102.
[0029] Подсистемы 118 извлечения флюида соединены с шиной 116 постоянного тока и могут содействовать извлечению флюида из соответствующих секций скважины 102. Например, как изображено на фиг. 1, одна подсистема 118 извлечения флюида расположена в одной или более из следующего: вертикальная секция 104, первая горизонтальная секция 106 и вторая горизонтальная секция 108. В зависимости от требований, может быть применено большее или меньшее число подсистем 118 извлечения флюида. Для простоты иллюстрации показана и описана более подробно только подсистема 118 извлечения флюида, расположенная в вертикальной секции 104.
[0030] Подсистема 118 извлечения флюида может включать электрическую машину 122. В одном варианте осуществления электрической машиной 122 может быть электродвигатель, например электродвигатель с постоянным магнитом (permanent magnet) (PM). В некоторых вариантах осуществления электрическая машина 122 (например, электродвигатель) может быть интегрирована в электрический погружной насос (ЭПН) (не показан на фиг. 1), где электродвигатель может приводить в действие рабочее колесо (рабочие колеса) ЭПН. В некоторых вариантах осуществления электрическая машина может содержать ротор и статор, имеющие множество фазных обмоток (как показано на фиг. 3). Дополнительные детали электрической машины 122 описаны в соответствии с фиг. 3.
[0031] Подсистема 118 извлечения флюида может дополнительно включать подсистему 124 управления. Подсистема 124 управления может быть электрически соединена с электрической машиной 122 и шиной 116 постоянного тока. Подсистема 124 управления может управляться контроллером 120. В некоторых вариантах осуществления подсистема 124 управления может быть выполнена с возможностью избирательно управлять подачей тока фазы на электрическую машину 122 из шины 116 постоянного тока. Соответственно, подсистема 124 управления может быть выполнена с возможностью управлять скоростью вращения (например, оборотами в минуту (revolutions per minute) (rpm)) ротора электрической машины 122 путем избирательного управления подачей тока фазы на одну или более из множества фазных обмоток. В некоторых вариантах осуществления фазный ток для одной или более из множества фазных обмоток может управляться таким образом, что скорость вращения ротора электрической машины 122 отличается от скорости вращения ротора другой электрической машины в одной или более других подсистем 118 извлечения флюида из множества подсистем 118 извлечения флюида. В некоторых вариантах осуществления подсистема 124 управления может быть выполнена с возможностью управлять скоростью вращения ротора электрической машины 122 независимо от скоростей вращения роторов в других подсистемах 118 извлечения флюида. Дополнительные детали подсистемы 124 управления описаны в соответствии с фиг. 3. В дальнейшем в этом документе термины «скорость вращения», «рабочая скорость», «рабочая скорость электрической машины» используются взаимозаменяемо и относятся к скорости вращения в оборотах в минуту ротора электрической машины, такой как электрическая машина 122.
[0032] Контроллер 120 может быть расположен вне скважины 102. Контроллер 120 может включать специально запрограммированный компьютер общего назначения, микропроцессор, цифровой сигнальный процессор и/или микроконтроллер. Контроллер 120 может также включать порты ввода/вывода и носитель информации, такой как электронное запоминающее устройство. Различные примеры микропроцессора включают, но не ограничиваются этим, микропроцессор с типом архитектуры сокращенного набора команд (reduced instruction set computing) (RISC) или микропроцессор с типом архитектуру комплексного набора команд (complex instruction set computing) (CISC). Кроме того, микропроцессор может быть одноядерного типа или многоядерного типа.
[0033] В некоторых вариантах осуществления контроллер 120 может быть выполнен с возможностью управлять работой силового преобразователя 114 и/или подсистем 118 извлечения флюида для того, чтобы достичь желаемого расхода и/или количества флюида из скважины 102. Для содействия такому управлению силового преобразователя 114 и/или подсистем 118 извлечения флюида в одном варианте осуществления контроллер 120 может быть соединен с силовым преобразователем 114 и/или подсистемами 118 извлечения флюида посредством шины 116 постоянного тока. В другом варианте осуществления контроллер 116 может быть соединен с силовым преобразователем 114 и/или подсистемами 118 извлечения флюида с помощью отдельных кабелей. В еще одном варианте осуществления контроллер 120 беспроводным образом соединен с силовым преобразователем 114 и/или подсистемами 118 извлечения флюида.
[0034] Для достижения желаемого расхода и/или количества флюида из скважины 102 может быть желательным управлять электрическими машинами различных подсистем 118 извлечения флюида при оптимальных рабочих скоростях. Соответственно, может быть желательным управлять электрическими машинами различных подсистем 118 извлечения флюида при разных рабочих скоростях. В некоторых вариантах осуществления рабочая скорость электрических машин, используемых в подсистемах 118 извлечения флюида, зависит от напряжения постоянного тока на шине 116 постоянного тока (см. фиг. 2).
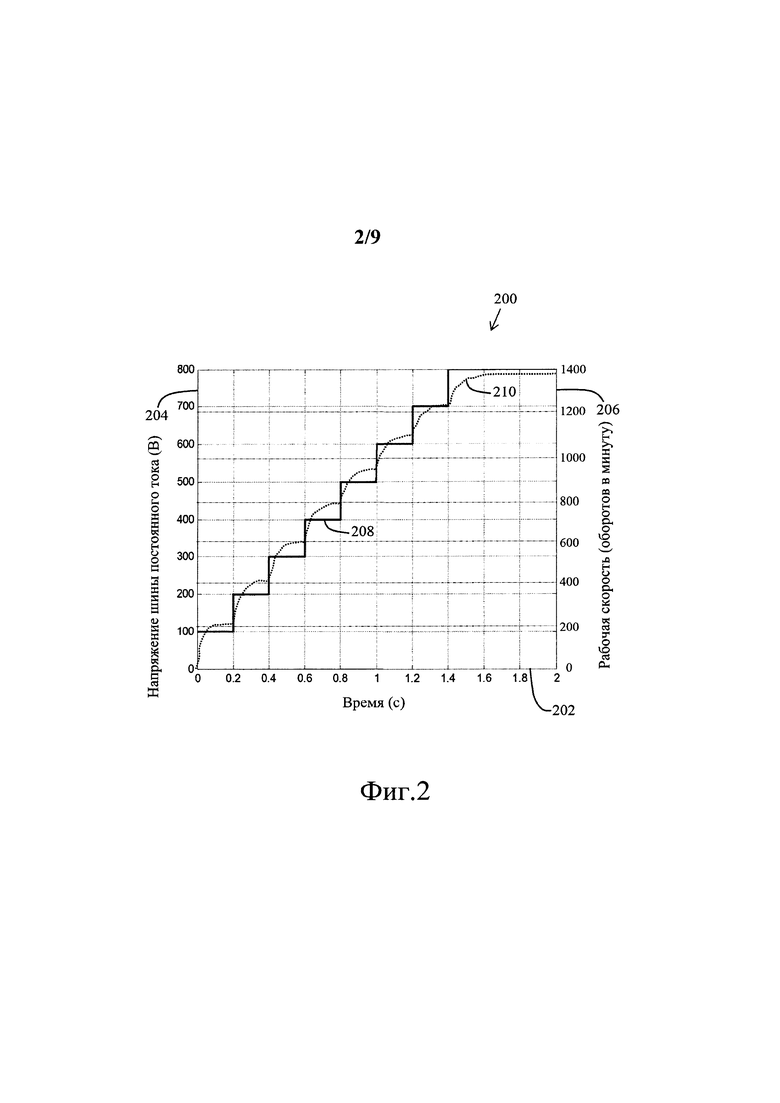
[0035] Обратимся теперь к фиг. 2, где представлено графическое изображение 200 примера зависимости между напряжением шины постоянного тока и рабочей скоростью электрической машины в соответствии с аспектами настоящего описания. Ось X 202 графического изображения 200 отображает время в секундах, например. Первая ось Y 204 отображает величины напряжения постоянного тока в вольтах в диапазоне от 0 до 800, для примера. Кроме того, вторая ось Y 206 отображает рабочую скорость электрической машины, такой как электрическая машина 122, в диапазоне от 0 до 1400 оборотов в минуту, для примера. В частности, график 208 представляет величины постоянного тока на шине 116 постоянного тока с шагом 100 вольт и график 210 представляет максимальные значения рабочей скорости электрической машины 122, соответствующие величинам напряжения постоянного тока на графике 208.
[0036] В соответствии с фиг. 1 в некоторых вариантах осуществления контроллер 120 может быть снабжен данными, относящимися к графическому изображению 200. Например, данные, относящиеся к графическому изображению 200, могут быть сохранены в памяти, связанной с контроллером 120, например, в форме справочной таблицы или математической зависимости. Соответственно, в зависимости от желаемых максимальных рабочих скоростей электрических машин в подсистемах 118 извлечения флюида, контроллер 120 может быть выполнен с возможностью управлять работой силового преобразователя 114 для регулирования величины напряжения постоянного тока на шине 116 постоянного тока. Контроллер 120 может определять величину напряжения постоянного тока на основе данных, относящихся к графическому изображению 200.
[0037] В некоторых вариантах осуществления в отсутствие управления, выполняемого системой 124 управления (как указывалось ранее), максимальная скорость электрических машин в подсистемах 118 извлечения флюида определяется с помощью величины напряжения постоянного тока на шине 116 постоянного тока (см. фиг. 2). Тем не менее, как упоминалось выше, может быть желательным управлять электрическими машинами подсистем 118 извлечения флюида при разных рабочих скоростях. Следовательно, в некоторых вариантах осуществления для того, чтобы в дальнейшем производить точную настройку рабочих скоростей электрических машин подсистем 118 извлечения флюида, контроллер 120 может быть выполнен с возможностью передавать сигнал управления скоростью (описывается далее на фиг. 3) к одной или более подсистемам 118 извлечения флюида. Сигнал управления скоростью может указывать желаемые рабочие скорости одной или более электрических машин в подсистемах 118 извлечения флюида. Такой сигнал управления скоростью может быть получен подсистемами управления подсистем 118 извлечения флюида. Соответственно, подсистемы управления могут быть выполнены с возможностью в дальнейшем управлять (например, уменьшать) рабочей скоростью соответствующих электрических машин на основе сигнала управления скоростью. Следовательно, электрические машины подсистем 118 извлечения флюида могут работать при разных рабочих скоростях.
[0038] Фиг. 3 представляет схематическое изображение подсистемы 300 извлечения флюида в соответствии с аспектами настоящего описания. Подсистема 300 извлечения флюида может представлять один вариант осуществления подсистемы 118 извлечения флюида на фиг. 1.
[0039] Как отмечалось ранее, подсистема 300 извлечения флюида может включать электрическую машину, такую как электрическую машину 302, которая приводит в действие насос. Электрическая машина 302 может включать неподвижный статор (не показан на фиг. 3). Статор может включать множество фазных обмоток, таких как фазные обмотки 308. Фазные обмотки 308 могут располагаться на полюсах статора (не показаны). В некоторых вариантах осуществления, как показано на фиг. 3, фазные обмотки 308 могут включать три комплекта обмоток, показанных с помощью чередующейся пары символов «точка» и «крест». В качестве примера, символ «крест» может обозначать проводники обмоток для подачи тока, направленного в плоскость документа, а «точка» может обозначать проводники обмоток для подачи тока, направленного из плоскости документа.
[0040] В некоторых вариантах осуществления электрическая машина 302 может включать три входных проводника 301, 303 и 305, далее называемых фазными входными линиями 301, 303 и 305. Фазные входные линии 301, 303 и 305 соединены с тремя комплектами фазных обмоток 308, соответственно. Ток фазы для каждой из трех комплектов фазных обмоток 308 может подаваться через фазные входные линии 301, 303 и 305.
[0041] Кроме того, электрическая машина 302 может включать ротор 306, подвижный (например, с возможностью вращения) по отношению к статору, когда ток фазы подается к одной или более фазным обмоткам 308. Для облегчения иллюстрации ротор 306 показан как имеющий два полюса 310 и 312 ротора. Другие варианты осуществления ротора 306, имеющего большее число полюсов ротора, также рассматриваются. В одном варианте осуществления полюса 310 и 312 ротора могут быть выполнены из постоянных магнитов. В качестве примера, полюса 310 и 312 ротора могут быть расположены таким образом, что N-сторона полюса 310 ротора и S-сторона полюса 312 ротора направлены радиально наружу, как показано на фиг. 3.
[0042] Кроме того, в некоторых вариантах осуществления электрическая машина 302 может быть также оборудована одним или более датчиками положения ротора, такими как датчики 314, 316 и 318 положения ротора. Датчики 314-318 положения ротора могут быть расположены поблизости от полюсов 310 и 312 ротора, как изображено на фиг. 3. В рассматриваемом в настоящее время варианте осуществления электрическая машина 302 показана как имеющая три датчика 314-318 положения ротора для облегчения иллюстрации. Использование большего или меньшего числа датчиков положения ротора также предусматривается для определения положения ротора посредством напряжений и токов, приложенных к фазным входным линиям 301, 303 и 305 двигателя. В неограничивающем примере датчики 314-318 положения ротора могут быть переключателями, которые могут переходить из включенного состояние в выключенное состояние и наоборот, исходя из тех сторон полюсов 310 и 312 ротора, напротив которых они находятся. В одном варианте осуществления датчики 314-318 положения ротора переходят во включенное состояние, когда они находятся напротив полюсов ротора, имеющих свои N-стороны, направленные радиально наружу. В других ситуациях датчики 314-318 могут переходить в выключенное состояние. Например, в рассматриваемом в настоящее время варианте осуществления датчики 314-318 положения ротора переходят во включенное состояние, когда они находятся напротив полюса 310 ротора, и в выключенное состояние, когда они находятся напротив полюса 312 ротора.
[0043] Каждый датчик положения ротора из датчиков 314-318 положения ротора может генерировать электрический сигнал (см. фиг. 4А-4С), который указывает на угловое положение ротора 306. Как отмечалось ранее, датчики 314-318 положения ротора могут переходить во включенное состояние или выключенное состояние в зависимости от сторон полюсов 310 и 312 ротора, напротив которых они находятся, что указывает на угловое положение ротора 306. В некоторых вариантах осуществления каждый из датчиков 314-318 положения ротора во включенном состоянии генерирует электрический сигнал, имеющий первую амплитуду (в неограничивающем примере +5 вольт), и в выключенном состоянии генерирует электрический сигнал, имеющий вторую амплитуду (в неограничивающем примере +0 вольт). Первая амплитуда и вторая амплитуда далее в настоящем документе называются «высоким уровнем» (Н) и «низким уровнем» (L), соответственно.
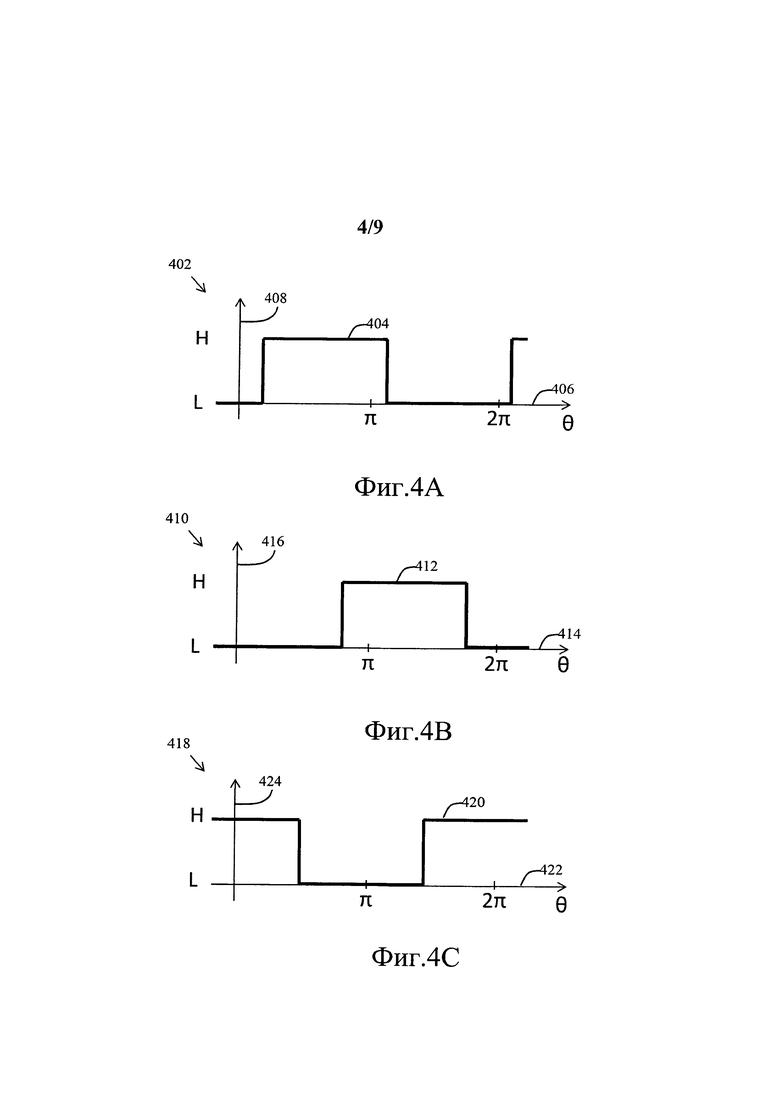
[0044] Фиг. 4А-4С представляют графические изображения примеров электрических сигналов, генерируемых датчиками 314-318 положения ротора, в соответствии с аспектами настоящего описания. В частности, фиг. 4 представляет графическое изображение 402 примера электрического сигнала 404, генерируемого датчиком 314 положения ротора. Ось X 406 графического изображения 402 представляет угол положения ротора в радианах, а ось Y 408 графического изображения 402 представляет уровень электрического сигнала 404. В неограничивающем примере уровни электрического сигнала 404 представлены как «Н» и «L». Аналогично, фиг. 4В представляет графическое изображение 410 примера электрического сигнала 412, генерируемого датчиком 316 положения ротора. Ось X 414 графического изображения 410 представляет угол положения ротора в радианах, а ось Y 416 графического изображения 410 представляет уровень электрического сигнала 412. В неограничивающем примере уровни электрического сигнала 412 представлены как «Н» и «L». Кроме того, фиг. 4С представляет графическое изображение 418 примера электрического сигнала 420, генерируемого датчиком 318 положения ротора. Ось X 422 графического изображения 418 представляет угол положения ротора в радианах, а ось Y 424 графического изображения 418 представляет уровень электрического сигнала 420. В неограничивающем примере уровни электрического сигнала 420 представлены как «Н» и «L».
[0045] Ссылаясь вновь на фиг. 3, в некоторых вариантах осуществления подсистема 300 извлечения флюида может также включать подсистему 320 управления, электрически соединенную с электрической машиной 302 и выполненную с возможностью управлять работой электрической машины 302. Кроме того, подсистема 320 управления может быть также электрически соединена с датчиками 314-318 положения ротора. Подсистема 320 управления может принимать электрические сигналы 404, 412 и 420 от датчиков 314, 316 и 318 положения ротора, соответственно.
[0046] Кроме того, подсистема 320 управления может быть также электрически соединена с шиной 322 постоянного тока, имеющей проводник 324 постоянного тока, проводящий положительный постоянный ток, и проводник 325 постоянного тока, проводящий отрицательный постоянный ток. Кроме того, подсистема 320 управления может быть также выполнена с возможностью принимать сигнал управления скоростью от контроллера, такого как контроллер 120, расположенного снаружи скважины 102. Подсистема 320 управления может быть выполнена с возможностью избирательно управлять подачей положительного постоянного тока и/или отрицательного постоянного тока, как фазными токами для фазных обмоток 308 электрической машины 302 посредством фазных входных линий 301, 303 и 305 на основе сигнала управления скоростью. Подсистема 320 управления может включать блок 326 управления сдвигом по фазе и блок 328 переключения. Блок 326 управления сдвигом по фазе коммуникативно связан с блоком 328 переключения.
[0047] Блок 326 управления сдвигом по фазе может включать электронику (аппаратное обеспечение и/или программное обеспечение), способную выполнять операции, включая, но не ограничиваясь этим, декодирование и/или введение задержки. В неограничивающем примере для содействия в вышеупомянутых операциях блок 326 управления сдвигом по фазе может включать, логические вентили, микропроцессор, память или их комбинации. Микропроцессор может представлять собой микропроцессор с типом архитектуры сокращенного набора команд (RISC) или микропроцессор с типом архитектуры комплексного набора команд (CISC). Кроме того, микропроцессор может быть одноядерного типа или многоядерного типа.
[0048] Блок 326 управления сдвигом по фазе может быть выполнен с возможностью генерировать командный сигнал фазы. Командный сигнал фазы может указывать на полярность фазного тока, подаваемого на одну или более фазных обмоток 308. Блок 326 управления сдвигом по фазе может генерировать командный сигнал фазы на основе входных сигналов блока 326 управления сдвигом по фазе. В некоторых вариантах осуществления входные сигналы блока 326 управления сдвигом по фазе могут включать электрические сигналы 404, 412 и 420 и сигнал управления скоростью, принятый от контроллера 120, расположенного снаружи скважины 102.
[0049] В некоторых вариантах осуществления сигнал управления скоростью может быть представлен в форме кода. Код может включать множество пар из подкода идентификатора и подкода уровня скорости, где каждая пара из подкода идентификатора и подкода уровня скорости может соответствовать одной из подсистем 118 извлечения флюида системы 120 извлечения флюида. Подкод идентификатора может указывать на подсистему извлечения флюида из подсистем 118 извлечения флюида. Подкод уровня скорости, связанный с идентификатором, может указывать на желаемую рабочую скорость, при которой электрическая машина соответствующей подсистемы извлечения флюида должна работать. Детали генерации сигнала управления скорости описываются ниже.
[0050] Соответственно, для данной подсистемы извлечения флюида, такой как подсистема 300 извлечения флюида, блок 326 управления сдвигом по фазе может быть выполнен с возможностью декодировать сигнал управления скоростью, чтобы определить подкод уровня скорости, предназначенный для подсистемы 300 извлечения флюида, путем сравнения заранее заданного идентификатора подсистемы 300 извлечения флюида с идентификаторами, содержащимися в сигнале управления скоростью. Соответственно, выбирается подкод уровня скорости, связанный с идентификатором, который совпадает с заранее заданным идентификатором подсистемы 300 извлечения флюида.
[0051] Кроме того, блок 326 управления сдвигом по фазе может также принимать электрические сигналы 404, 412 и 420, генерируемые датчиками 314-318 положения ротора. Для того чтобы генерировать командный сигнал фазы, блок 326 управления сдвигом по фазе может быть выполнен с возможностью применить сдвиг по фазе к полученным электрическим сигналам для генерации сдвинутых по фазе электрических сигналов (см. фиг. 5А-5С) на основе сигнала управления скоростью и в частности на основе выбранного подкода уровня скорости.
[0052] Фиг. 5А, 5В и 5С соответственно представляют графические изображения 502, 504 и 506 примеров сдвинутых по фазе электрических сигналов в соответствии с аспектами настоящего описания. Ось X 508, 510 и 512 графических изображений 502, 504 и 506, соответственно, представляет угол положения ротора в радианах. Ось Y 514, 516 и 518 графических изображений 502, 504 и 506 представляет уровень сдвинутых по фазе электрических сигналов 520, 522 и 524, соответственно, комбинации которых предписывают, когда каждая входная линия проводит фазный ток. В неограничивающем примере уровни сдвинутых по фазе электрических сигналов 520, 522 и 524 представлены как «Н» и «L». Сдвинутые по фазе электрические сигналы 520, 522 и 524 представляют электрические сигналы 404, 412 и 418, соответственно, когда сдвиг по фазе (например, задержку) величиной 0 применяют к электрическим сигналам 404, 412 и 418, соответственно. Следует понимать, что сдвиг по фазе может быть отрицательным, соответствующим опережению по фазе, а не задержке по фазе.
[0053] Ссылаясь вновь на фиг. 3, в некоторых вариантах осуществления блок 326 управления сдвигом по фазе может быть выполнен с возможностью генерировать сдвинутые по фазе электрические сигналы 520, 522 и 524 путем применения сдвига по фазе величиной ∅ к электрическим сигналам 404, 412 и 418, соответственно, на фиг. 4А-4С. В некоторых вариантах осуществления подкоды уровня скорости, содержащиеся в сигнале управления скоростью, указывают на различные величины сдвигов по фазе. Соответственно, блок 326 управления сдвигом по фазе может определить величину 0 сдвига по фазе на основе выбранного подкода уровня скорости из сигнала управления скоростью.
[0054] Как отмечалось выше, в системе извлечения флюида, такой как система 100 извлечения флюида, может быть желательным управлять электрическими машинами подсистем 118 извлечения флюида при различных рабочих скоростях. Соответственно, подсистемы управления соответствующих подсистем 118 извлечения флюида могут определить величину сдвигов по фазе на основе их соответствующих заранее определенных идентификаторов и сигнала управления скоростью аналогично тому, как упоминалось выше. Соответственно, различные сдвиги по фазе могут быть применены различными подсистемами управления, тем самым управляя электрическими машинами подсистем 118 извлечения флюида при различных рабочих скоростях.
[0055] Кроме того, в некоторых вариантах осуществления блок 326 управления сдвигом по фазе может быть выполнен с возможностью генерировать командный сигнал фазы на основе сдвинутых по фазе электрических сигналов 520-524. Как отмечалось выше, командный сигнал фазы может указывать полярность фазного тока, подаваемого на одну или более фазных обмоток 308 электрической машины 302. Таблица 1, показанная ниже, иллюстрирует пример зависимости между уровнями сдвинутых по фазе электрических сигналов 520-524 и полярностью фазных токов, подлежащих подаче на электрическую машину 302.

[0056] В неограничивающем примере последняя колонка Таблицы -1 представляет примеры кодов, указывающих на сигналы управления фазой, генерируемые в соответствии с данными в соответствующей строке. В качестве примера, для данного командного сигнала фазы (+1, -1, 0) символы +1, -1 и 0 соответственно указывают на полярность фазных токов, подаваемых на фазные входные линии 301, 303 и 305. Символ +1 может указывать положительную полярность, символ -1 может указывать отрицательную полярность, в то время как символ 0 может указывать отсутствие подачи тока.
[0057] Кроме того, в некоторых вариантах осуществления блок 326 управления сдвигом по фазе может передавать сгенерированный командный сигнал фазы в блок 328 переключения. Блок 328 переключения может быть выполнен с возможностью подавать фазные токи желаемой полярности, указанной с помощью командного сигнала фазы, на фазные входные линии 301, 303 и 305. Для того чтобы генерировать фазные тока, блок 328 переключения может содержать узел 330 переключателей, функционально соединенный с блоком 332 управления вентилями. Более конкретно, выходные клеммы 334, 336, 338, 340, 342 и 344 блока 332 управления вентилями соединены с узлом 330 переключателей. Выходные клеммы 334, 336, 338, 340, 342 и 344 далее совместно именуются выходными клеммами 334-344.
[0058] В некоторых вариантах осуществления узел 330 переключателей может включать множество полупроводниковых переключателей для избирательной подачи фазного тока в одну или более фазных обмоток 308 на основе множества полученных сигналов управления (описанных позднее), принятых от блока 332 управления вентилями. В неограничивающем примере узел 330 переключателей может включать шесть полупроводниковых переключателей 335, 337, 339, 341, 343, 345, расположенных как показано на фиг. 3. Полупроводниковые переключатели 335, 337, 339, 341, 343 и 345 далее в настоящем документе совместно именуются полупроводниковыми переключателями 335-345. Неограничивающие примеры полупроводниковых переключателей 335-345 могут включать транзисторы, тиристоры, коммутируемые по затвору, полевые транзисторы, биполярные транзисторы с изолированным затвором, запираемые тиристоры, статические индукционные транзисторы, статические индукционные тиристоры или их комбинации. Кроме того, материалы, используемые для формирования полупроводниковых переключателей 335-345, могут включать, но не ограничиваются этим, кремний (Si), карбид кремния (SiC), нитрид галлия (GaN) или их комбинации.
[0059] В качестве неограничивающего примера N-канальных полевых транзисторов каждый из полупроводниковых переключателей 335-345 может включать электрод стока, электрод истока и управляющий электрод (например, электрод затвора). Как изображено на фиг. 3, электроды стоков полупроводниковых переключателей 335, 339 и 343 могут быть соединены с проводником 324 постоянного тока, проводящим положительный постоянный ток, а электроды истоков полупроводниковых переключателей 337, 341 и 345 могут быть соединены с проводником 325 постоянного тока, проводящим отрицательный постоянный ток. Кроме того, электроды истоков полупроводниковых переключателей 335, 339 и 343 могут быть соответственно соединены с электродами затворов полупроводниковых переключателей 337, 341 и 345. Кроме того, электроды истоков полупроводниковых переключателей 335, 339 и 343 и электроды затворов полупроводниковых переключателей 337, 341 и 345 могут быть соединены с фазными входными линиями 301, 303 и 305 электрической машины. Кроме того, управляющие электроды полупроводниковых переключателей 334-344 соединены с блоком 332 управления вентилями для получения соответствующих сигналов из множества сигналов управления. Более конкретно, управляющие электроды полупроводниковых переключателей 335, 337, 339, 341, 343 и 345 соответственно соединены с выходными клеммами 334, 336, 338, 340, 342, 344 блока 332 управления вентилями.
[0060] В варианте осуществления на фиг. 3 N-канальные полевые МОП-транзисторы используются в качестве полупроводниковых переключателей 335-345. Соответственно, в одном варианте осуществления применение сигнала управления высокого уровня (Н) на их управляющих электродах относительно соответствующих электродов истоков может включить полупроводниковые переключатели 335-345. В то же время, применение сигнала управления низкого уровня (L) на их управляющих электродах относительно соответствующих электродов истоков может выключить полупроводниковые переключатели 335-345. Следует заметить, что если в качестве полупроводниковых переключателей 335-345 используются P-канальные полевые МОП-транзисторы, уровни сигналов управления могут быть взаимозаменяемы.
[0061] Блок 332 управления вентилями используется для управления переключением полупроводниковых переключателей 335-345 путем избирательной подачи сигналов управления на управляющие электроды полупроводниковых переключателей 335-345. Блок 332 управления вентилями может содержать электронику (аппаратное обеспечение и/или программного обеспечение), способную генерировать множество сигналов управления. В неограничивающем примере блок 332 управления вентилями может включать логические схемы, транзисторы, микроконтроллер, микропроцессор, память или их комбинации.
[0062] Блок 332 управления вентилями может принимать командный сигнал фазы от блока 326 управления сдвигом по фазе. После получения командного сигнала фазы блок 332 управления вентилями может быть выполнен с возможностью генерировать множество сигналов управления на основе командного сигнала фазы. В одном варианте осуществления Таблица 2, показанная ниже, представляет множество уровней сигналов управления, возникающих на выходных клеммах 334-344, где множество уровней сигналов управления соответствует различным командным сигналам фазы. Кроме того, блок 332 управления вентилями может быть выполнен с возможностью передавать множество сигналов управления на управляющие электроды полупроводниковых переключателей 335-345 посредством выходных клемм 334-344, соответственно.


[0063] Первый столбец Таблицы 2 представляет командные сигналы фазы, а второй столбец представляет уровни сигналов управления, возникающих на выходных клеммах 334, 336, 338, 340, 342 и 344, соответственно, блока 332 управления вентилями. Например, со ссылкой на пример, показанный в первой строке Таблицы 2, команда фазы (+1, -1, 0) указывает на подачу положительного постоянного тока на фазную входную линию 301, подачу отрицательного постоянного тока на фазную входную линию 303 и отключение подачи фазного тока на фазную входную линию 305. Как показано в Таблице 2, соответствующими уровнями сигналов управления на выходных клеммах 334, 336, 338, 340, 342 и 344 являются Н, L, L, Н, L и L, соответственно. Соответственно, полупроводниковые переключатели 334 и 340 включаются, в то время как другие полупроводниковые переключатели (336, 338, 342 и 344) выключаются. Следовательно, положительный постоянный ток подается на фазную входную линию 301 и отрицательный постоянный ток подается на фазную входную линию 303, в то время как никакой ток не подается на фазную входную линию 305. Аналогично, примеры, показанные в других строках Таблицы 2, могут быть интерпретированы подобным образом.
[0064] В некоторых вариантах осуществления блок 332 управления вентилями может опционально включать подблок 333 широтно-импульсной модуляции (ШИМ) (pulse width modulation) (PWM) (показанный с помощью пунктирного прямоугольника). ШИМ-подблок 333 может быть выполнен с возможностью применить ШИМ к одному или более сигналам управления на выходных клеммах 334, 336, 338, 340, 342 и 344 для того, чтобы добиться более точной регулировки рабочей скорости электрической машины 302.
[0065] В одном варианте осуществления длительность импульса сигналов управления на одной или более выходных клеммах 334, 336, 338, 340, 342 и 344, может регулироваться с помощью ШИМ-подблока 333 на основе амплитуд фазных токов на двух или более фазных входных линиях 301, 303 и 305. 302. Амплитуды фазных токов на двух или более фазных входных линиях 301, 303 и 305 могут быть найдены с помощью одного или более датчиков тока (не показаны на фиг. 3), электрически соединенных с фазными входными линиями 301, 303 и 305 или расположенных поблизости от фазных входных линий 301, 303 и 305. Один или более датчиков тока могут быть расположены внутри электрической машины 302 или снаружи электрической машины 302. Кроме того, один или более датчиков тока электрически соединены с ШИМ-подблоком 333 для передачи электрического сигнала, указывающего на амплитуды фазных токов на двух или более фазных входных линиях 301, 303 и 305.
[0066] В другом варианте осуществления амплитуды фазных токов на двух или более фазных входных линиях 301, 303 и 305 могут быть определены с помощью одного или более датчиков тока (не показаны на фиг. 3), электрически соединенных с проводниками 324 и 325 постоянного тока или расположенных поблизости от проводников 324 и 325 постоянного тока. Один или более датчиков тока электрически соединены с ШИМ-подблоком 333 для передачи электрического сигнала, указывающего на амплитуды фазного тока на проводниках 324 и 325 постоянного тока.
[0067] Фиг. 6 представляет графическое изображение 600, показывающее пример зависимости между величиной сдвига по фазе и рабочей скоростью электрической машины в соответствии с аспектами настоящего описания. В неограничивающем примере графическое изображение 600 показывает зависимость между величиной сдвига по фазе и рабочей скоростью электрической машины (например, 122 или 302) при максимальном напряжении 800 вольт постоянного тока (см. фиг. 2). Соответственно, как показано, максимальная рабочая скорость 1400 оборотов в минуту достигается, когда напряжение 800 вольт постоянного тока подается на шину 116 постоянного тока (см. фиг. 1).
[0068] Ось X 602 графического изображения 600 представляет время в секундах, для примера. Первая ось Y 604 представляет сдвиг по фазе в градусах, в диапазоне от -100 до +50, для примера. Кроме того, вторая ось Y 606 представляет рабочую скорость электрической машины 122 в диапазоне от 0 до 1400 оборотов в минуту, например. График 608 представляет значения сдвигов по фазе. Кроме того, график 610 указывает на значения рабочей скорости электрической машины 122, соответствующей значениям сдвигов по фазе графика 608. Из графического изображения 600 можно видеть, что по мере того как сдвиг по фазе растет, рабочая скорость электрической машины 122 уменьшается. Например, при уровне напряжения 800 вольт постоянного тока на шине 116 постоянного тока, максимальная скорость, которая может быть достигнута, равна 1400 оборотов в минуту. Однако если желательно работать при скорости примерно 600 оборотов в минуту, необходимо ввести сдвиг по фазе примерно -32 градуса в электрический сигнал, генерируемый датчиками положения ротора.
[0069] В некоторых вариантах осуществления данные, дающие графическое изображение 600, могут быть сохранены в памяти, связанной с контроллером 120, в форме справочной таблицы или математической зависимости, для примера. В некоторых вариантах осуществления, как отмечено ранее, для того чтобы управлять электрическими машинами подсистем 118 извлечения флюида при разных рабочих скоростях, контроллер 120 может генерировать и передавать сигнал управления скорости в подсистемы 118 извлечения флюида. В неограничивающем примере контроллер 120 может генерировать сигнал управления скоростью на основе зависимости, показанной на графическом изображении 600.
[0070] В качестве примера, в процессе работы системы 100 извлечения флюида для данной величины напряжения постоянного тока (например, 800 вольт), если желательно, чтобы одна электрическая машина (например, электрическая машина 122) подсистем 118 извлечения флюида в вертикальной секции 104 работала при скорости 600 оборотов в минуту, контроллер 120 может определить, что сдвиг по фазе -32 градуса должен быть введен в электрический сигнал, генерируемый датчиками положения ротора. Аналогичным образом, в зависимости от желаемым рабочих скоростей электрических машин в подсистемах 119 извлечения флюида, контроллер 120 может определить величины требуемых сдвигов по фазе. Как только величины требуемых сдвигов по фазе определены, контроллер 120 может определить подкоды уровней скорости, соответствующие определенным величинам требуемых сдвигов по фазе. В некоторых вариантах осуществления отображение в виде карты величин сдвига по фазе и подкодов уровней скорости сохраняется в памяти, связанной с контроллером 120. Соответственно, контроллер 120 может генерировать подкоды уровней скорости, соответствующие величинам требуемых сдвигов по фазе, используя отображение в виде карты величин сдвига фазы и подкодов уровней скорости, сохраненных в памяти. Как только подкоды уровней скорости сгенерированы, контроллер 120 может генерировать сигнал управления скоростью, имеющий пары подкода идентификатора и подкода уровня скорости для подсистем 118 извлечения флюида системы 100 извлечения флюида. Контроллер 120 может быть дополнительно выполнен с возможностью передавать сгенерированный сигнал управления скоростью подсистемам 118 извлечения флюида.
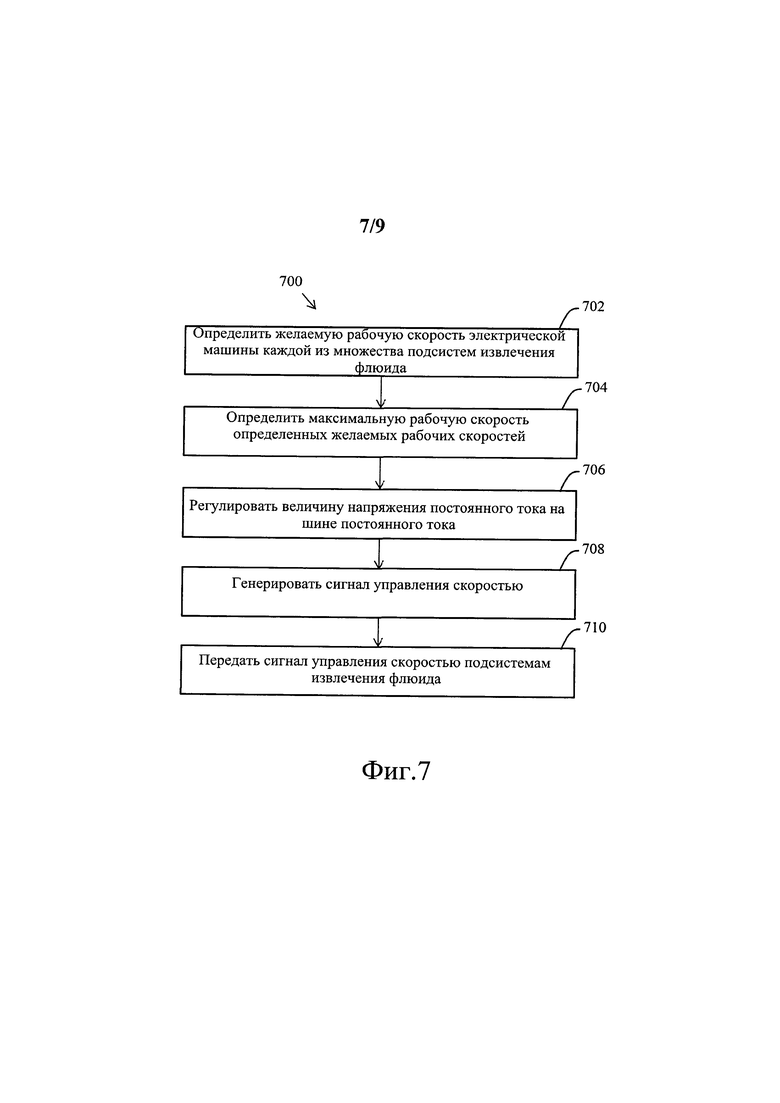
[0071] Фиг. 7 представляет блок-схему 700 примера способа управления рабочими скоростями электрических машин в подсистемах 118 извлечения флюида по фиг. 1, соединенных с шиной 116 постоянного тока, в соответствии с аспектами настоящего описания. Более конкретно, контроллер 120 при выполнении способа по блок-схеме 700 может быть выполнен с возможностью управлять рабочей скоростью данной электрической машины, такой как электрическая машина 122, независимо от рабочих скоростей электрических машин других подсистем 118 извлечения флюида.
[0072] В некоторых вариантах осуществления может быть желательным управлять электрическими машинами подсистем 118 извлечения флюида при различных рабочих скоростях. Соответственно, на шаге 702 определяют желаемые рабочие скорости соответствующих электрических машин одной или более из множества подсистем 118 извлечения флюида. Контроллер 120 может определить желаемые рабочие скорости электрических машин одной или более из множества подсистем 118 извлечения флюида на основе вида, желаемой скорости потока и/или количества флюида, подлежащего извлечению. Кроме того, максимальная рабочая скорость из определенных рабочих скоростей может быть определена с помощью контроллера 120, как указано с помощью шага 704.
[0073] Кроме того, на шаге 706 величина напряжения постоянного тока на шине 116 постоянного тока может быть отрегулирована с помощью контроллера 120. В некоторых вариантах осуществления величина напряжения постоянного тока на шине 116 постоянного тока может быть отрегулирована на основе максимальной рабочей скорости таким образом, что по меньшей мере одна электрическая машины из электрических машин может работать при максимальной рабочей скорости. Как отмечалось ранее, контроллер 120 может определить величину напряжения постоянного тока, которое должно появиться на шине 116 постоянного тока, на основе зависимости, как изображено на графическом изображении 200 по фиг. 2.
[0074] Кроме того, на шаге 708 сигнал управления скоростью может быть сгенерирован контроллером 120 на основе желаемой рабочей скорости каждой электрической машины и желаемой величины сдвига по фазе, соответствующего желаемой рабочей скорости каждой электрической машины каждой из множества подсистем 118 извлечения флюида. Детали генерирования сигнала управления скоростью описываются в отношении фиг. 8. Как отмечалось ранее, сигнал управления скоростью может быть представлен в форме кода. Код может включать множество пар подкода идентификатора и подкода уровня скорости, где каждая пара подкода идентификатора и подкода уровня скорости может соответствовать одной из подсистем 118 извлечения флюида системы 120 извлечения флюида. Подкод идентификатора может указывать на некоторую подсистему извлечения флюида из подсистем 118 извлечения флюида. Подкод уровня скорости может указывать на желаемую рабочую скорость, при которой электрическая машина соответствующей подсистемы извлечения флюида должна работать.
[0075] Кроме того, сигнал управления скоростью может быть передан подсистемам 118 извлечения флюида контроллером 120, как указано с помощью шага 710. Более конкретно, сигнал управления скоростью может быть передан таким образом, что электрические машины в подсистемах 118 извлечения флюида могут работать при соответствующих желаемых рабочих скоростях. В некоторых вариантах осуществления в каждой подсистеме 300 извлечения флюида сигнал управления скоростью может быть принят соответствующим блоком управления сдвигом по фазе, таким как блок 326 управления сдвигом по фазе. Подробные шаги по управлению работы электрической машины описаны в отношении фиг. 9.
[0076] Фиг. 8 представляет блок-схему 800 примера способа генерирования сигнала управления скоростью в соответствии с аспектами настоящего описания. Как отмечалось ранее, на шаге 702 блок-схемы 700 контроллер 120 может определить желаемые рабочие скорости электрических машин подсистем 118 извлечения флюида. Кроме того, величина напряжения постоянного тока может быть отрегулирована при определенном уровне на шаге 706 блок-схемы 700.
[0077] На шаге 802 величину сдвига по фазе, соответствующего желаемой рабочей скорости электрической машины каждой из множества подсистем 118 извлечения флюида, определяют контроллером 120. Как отмечалось ранее, контроллер 120 может определять величины сдвигов по фазе, соответствующих желаемым рабочим скоростям, используя зависимость, показанную на графическом изображении 600 фиг. 6.
[0078] Кроме того, подкод уровня скорости, соответствующий каждой из определенных величин сдвигов по фазе, может быть сгенерирован контроллером 120, как указано с помощью шага 804. Контроллер 120 может генерировать подкоды уровней скорости, соответствующие величинам требуемых сдвигов по фазе, используя соответствие величин сдвига по фазе и подкодов уровней скорости, хранящееся в памяти, связанной с контроллером 120.
[0079] В некоторых вариантах осуществления память, связанная с контроллером 120, также включает подкоды идентификаторов множества подсистем 118 извлечения флюида. Соответственно, как только подкоды уровней скорости сгенерированы, сигнал управления скоростью в форме кода может быть генерирован контроллером 120, как указано с помощью шага 806. В качестве примера сигнал управления скоростью может быть генерирован путем конкатенации пар подкода идентификатора и подкода уровня скорости для каждой из подсистем 118 извлечения флюида.
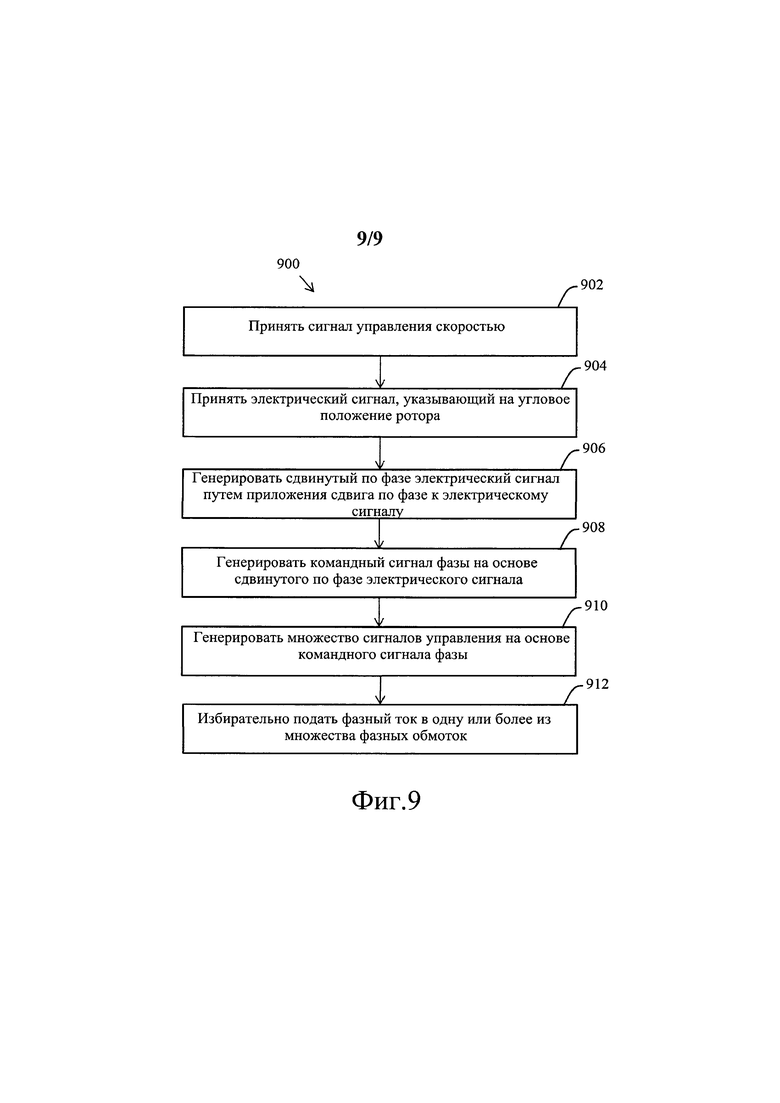
[0080] Фиг. 9 представляет блок-схему 900 примера способа управления электрической машиной, такой как электрическая машина 302 (см. фиг. 3), в соответствии с аспектами настоящего описания.
[0081] На шаге 902 сигнал управления скоростью, такой как сигнал управления скоростью, генерированный на шаге 706 (см. фиг. 7), может быть принят подсистемой 320 управления подсистемы 300 извлечения флюида. Более конкретно, сигнал управления скоростью может быть принят блоком 326 управления сдвигом по фазе. Кроме того, электрический сигнал, указывающий на угловое положение ротора 306, может быть принят блоком 326 управления сдвигом по фазе, как указано с помощью шага 904. В качестве примера электрические сигналы 404, 412 и 420 (см. фиг. 4), генерированные датчиками 314-318 положения ротора, могут быть приняты блоком 326 управления сдвигом по фазе.
[0082] Кроме того, на шаге 906 сдвинутый по фазе электрический сигнал может быть генерирован путем применения сдвига по фазе к электрическому сигналу. Например, блок 326 управления сдвигом по фазе может генерировать сдвинутые по фазе сигналы 520-524 (см. фиг. 5) путем применения сдвига по фазе к электрическим сигналам 404, 412 и 420. В одном варианте осуществления величину сдвига по фазе определяют на основе по меньшей мере сигнала управления скоростью, указывающего на желаемую скорость вращения (например, рабочую скорость) ротора 306. Более конкретно, контроллер 120 может определить величину сдвига по фазе на основе подкода уровня скорости (содержащегося в сигнале управления скоростью), соответствующего подсистеме 300 извлечения флюида.
[0083] Кроме того, командный сигнал фазы может быть генерирован блоком 326 управления сдвигом по фазе на основе сдвинутых по фазе электрических сигналов 520-524, как указано с помощью шага 908. В одном варианте осуществления командный сигнал фазы может быть генерирован блоком 326 управления сдвигом по фазе на основе уровней сдвинутых по фазе электрических сигналов 520-524, используя зависимость, отраженную в Таблице 1.
[0084] Кроме того, на шаге 910 множество сигналов управления может быть генерировано на основе командного сигнала фазы. Множество сигналов управления генерируется блоком 332 управления вентилями, используя, например, зависимости из Таблицы 2. В зависимости от множества сигналов управления фазный ток может быть избирательно подан в одну или более из множества фазных обмоток 328, как показано с помощью шага 912. Кроме того, на основе множества сигналов управления один или более полупроводниковых переключателей 334-344 могут быть избирательно включены для подачи фазного тока с полярностями, указанными с помощью командного сигнала фазы.
[0085] Любой из вышеуказанных шагов и/или элементов системы могут быть подходящим образом заменены, переупорядочены или удалены, и дополнительные шаги и/или элементы системы могут быть введены в зависимости от потребностей конкретного применения, и системы вышеописанных вариантов осуществления могут быть осуществлены с использованием широкого разнообразия подходящих процессов и элементов системы и не ограничены каким бы то ни было конкретным компьютерным аппаратным обеспечением, программным обеспечением, промежуточным программным обеспечением, встроенным программным обеспечением, микрокодом и т.п.
[0086] Кроме того, вышеприведенные примеры, демонстрации и шаги способа, такие, как те, что могут быть выполнены контроллером 120, могут быть осуществлены с помощью подходящего кода в системе на базе процессора, такого как компьютер общего назначения или специального назначения. Различные реализации систем и способов могут выполнять некоторые или все шаги, описанные в настоящем документе, в разном порядке, параллельно или по существу одновременно. Кроме того, функции могут быть реализованы на различных языках программирования, включая, но не ограничиваясь этим, С++ или Java. Такой код может храниться или приспособлен для хранения на одном или более материальных машиночитаемых носителях, таких как чипы хранения данных, локальные или удаленные жесткие диски, оптические диски (т.е. компакт-диски или DVD), память или другие носители, к которым может иметь доступ система на базе процессора для исполнения хранящегося кода.
[0087] Системы и способы, описанные в настоящем документе, содействуют снижению общей стоимости системы извлечения флюида. Эффективность затрат достигается по меньшей мере частично благодаря использованию подачи регулируемого напряжения постоянного тока к подсистемам извлечения флюида в скважине. Кроме того, рабочие скорости электрических машин являются независимо управляемыми. Такое независимое управление рабочими скоростями достигается, по меньшей мере частично, за счет использования сигнала управления скоростью и его декодирования с помощью блока управления сдвигом по фазе, чтобы управлять подачей фазных токов на электрическую машину. Кроме того, использование полупроводниковых переключателей, которые формируются с использованием материалов, способных выдерживать высокие температуры, таких как карбид кремния, содействует повышению надежности.
[0088] Следует понимать, что варианты описанных выше и других признаков и функций или их альтернативы могут быть скомбинированы для создания многих других отличных систем или применений. Различные непредвиденные альтернативы, модификации, варианты или улучшения в них могут быть произведены специалистами в данной области техники, и они также охвачены следующими вариантами осуществления.





Изобретение относится к области электротехники и может быть использовано в системе извлечения скважинных флюидов, например нефти и/или газа из скважины. Представлена подсистема управления для управления электрической машиной. Техническим результатом является повышение надежности оборудования в тяжелых условиях эксплуатации внутри скважины и обеспечение управления скоростью работы электрических погружных насосов (ЭПН) независимо от работы других ЭПН, расположенных в скважине. Подсистема управления содержит блок управления сдвигом по фазе для приема электрического сигнала, указывающего на угловое положение ротора. Блок управления сдвигом по фазе генерирует сдвинутый по фазе электрический сигнал путем приложения сдвига по фазе к электрическому сигналу. Величину сдвига по фазе определяют на основе сигнала управления скоростью. Блок управления сдвигом по фазе выполнен с возможностью генерировать командный сигнал фазы на основе сдвинутого по фазе электрического сигнала. Подсистема управления также содержит блок переключения для управления подачей фазного тока к одной или более фазным обмоткам электрической машины на основе командного сигнала фазы таким образом, что ротор работает при заранее заданной скорости вращения. Также представлены система извлечения флюида и способ управления электрической машиной. 4 н. и 32 з.п. ф-лы, 13 ил.
1. Подсистема управления для управления электрической машиной, содержащая:
блок управления сдвигом по фазе, выполненный с возможностью:
принимать электрический сигнал, указывающий угловое положение ротора электрической машины, от по меньшей мере одного датчика положения ротора электрической машины;
генерировать сдвинутый по фазе электрический сигнал путем применения сдвига по фазе к электрическому сигналу, где величина сдвига по фазе определяется на основе по меньшей мере сигнала управления скоростью, указывающего заранее заданную скорость вращения ротора;
генерировать командный сигнал фазы на основе сдвинутого по фазе электрического сигнала; и
блок переключения, электрически соединенный с блоком управления сдвигом по фазе и выполненный с возможностью управлять подачей фазного тока к одной или более фазным обмоткам из множества фазных обмоток электрической машины на основе командного сигнала фазы таким образом, что ротор работает при заранее заданной скорости вращения.
2. Подсистема по п. 1, в которой блок управления сдвигом по фазе дополнительно выполнен с возможностью принимать сигнал управления скоростью от контроллера, удаленного от подсистемы управления.
3. Подсистема по п. 1, в которой командный сигнал фазы указывает полярность фазного тока, подаваемого на одну или более из множества фазных обмоток.
4. Подсистема по п. 1, в которой блок переключения содержит блок управления вентилями, электрически соединенный с блоком управления сдвигом по фазе и выполненный с возможностью генерировать множество сигналов управления на основе командного сигнала фазы.
5. Подсистема по п. 4, в которой блок управления вентилями содержит подблок широтно-импульсной модуляции (ШИМ), выполненный с возможностью применять ШИМ к одному или более из множества сигналов управления на основе амплитуды фазного тока.
6. Подсистема по п. 4, в которой блок переключения дополнительно содержит узел переключателей, имеющий множество полупроводниковых переключателей для избирательной подачи фазного тока в одну или более из множества фазных обмоток на основе множества сигналов управления.
7. Подсистема по п. 6, в которой каждый из множества полупроводниковых переключателей имеет управляющий электрод, который соединен с блоком управления вентилями для получения соответствующего сигнала управления из множества сигналов управления.
8. Подсистема по п. 6, в которой множество полупроводниковых переключателей представляют собой транзисторы, тиристоры, коммутируемые по затвору, полевые транзисторы, биполярные транзисторы с изолированным затвором, запираемые тиристоры, статические индукционные транзисторы, статические индукционные тиристоры или их комбинации.
9. Подсистема по п. 6, в которой множество полупроводниковых переключателей изготовлены из кремния (Si), карбида кремния (SiC), нитрида галлия (GaN) или их комбинаций.
10. Подсистема по п. 1, в которой блок переключения дополнительно электрически соединен с шиной постоянного тока и в которой фазный ток получают из шины постоянного тока.
11. Подсистема по п. 10, в которой максимальная скорость вращения ротора электрической машины зависит от уровня напряжения постоянного тока на шине постоянного тока.
12. Система извлечения флюида, содержащая:
шину постоянного тока; и
множество подсистем извлечения флюида, выполненных с возможностью электрического соединения с шиной постоянного тока, где по меньшей мере одна подсистема извлечения флюида из множества подсистем извлечения флюида включает:
электрическую машину, выполненную с возможностью содействовать извлечению флюида из скважины, где электрическая машина содержит по меньшей мере множество фазных обмоток и ротор; и
подсистему управления, электрически соединенную с электрической машиной и выполненную с возможностью управлять скоростью вращения ротора путем избирательного управления подачей фазного тока из шины постоянного тока в одну или более из множества фазных обмоток таким образом, что скорость вращения ротора электрической машины отличается от скорости вращения ротора другой электрической машины в по меньшей мере одной из других подсистем извлечения флюида из множества подсистем извлечения флюида.
13. Система по п. 12, в которой электрическая машина является электродвигателем, встроенным в электрический погружной насос.
14. Система по п. 13, в которой электродвигатель является электродвигателем с постоянным магнитом.
15. Система по п. 12, в которой по меньшей мере одна подсистема извлечения флюида содержит по меньшей мере один датчик положения ротора, расположенный вблизи ротора и выполненный с возможностью генерировать электрический сигнал, указывающий угловое положение ротора.
16. Система по п. 15, в которой подсистема управления по меньшей мере одной подсистемы извлечения флюида содержит блок управления сдвигом по фазе, выполненный с возможностью:
принимать электрический сигнал от по меньшей мере одного датчика положения ротора;
генерировать сдвинутый по фазе электрический сигнал путем применения сдвига по фазе к электрическому сигналу, где величина сдвига по фазе определяется на основе по меньшей мере сигнала управления скоростью, указывающего скорость вращения ротора; и
генерировать командный сигнал фазы на основе сдвинутого по фазе электрического сигнала, где командный сигнал фазы указывает полярность фазного тока, подаваемого на одну или более из множества фазных обмоток.
17. Система по п. 16, в которой подсистема управления по меньшей мере одной подсистемы извлечения флюида дополнительно содержит блок переключения, электрически соединенный с блоком управления сдвигом по фазе и шиной постоянного тока и выполненный с возможностью избирательно управлять подачей фазного тока в одну или более из множества фазных обмоток на основе командного сигнала фазы.
18. Система по п. 16, в которой блок переключения содержит блок управления вентилями, электрически соединенный с блоком управления сдвигом по фазе и выполненный с возможностью генерировать множество сигналов управления на основе командного сигнала фазы.
19. Система по п. 18, в которой блок переключения дополнительно содержит узел переключателей, имеющий множество полупроводниковых переключателей для избирательной подачи фазного тока в одну или более из множества фазных обмоток на основе множества сигналов управления.
20. Система по п. 18, в которой каждый из множества полупроводниковых переключателей имеет управляющий электрод, где управляющий электрод соединен с блоком управления вентилями для приема соответствующего сигнала управления из множества сигналов управления.
21. Система по п. 16, дополнительно содержащая контроллер, расположенный вне скважины и выполненный с возможностью передавать сигнал управления скоростью в блок управления сдвигом по фазе.
22. Система по п. 21, дополнительно содержащая силовой преобразователь, расположенный вне скважины, функционально соединенный с контроллером и выполненный с возможностью обеспечивать мощность постоянного тока на шине постоянного тока на основе сигнала управления мощностью от контроллера.
23. Система по п. 12, в которой максимальная скорость вращения ротора в электрической машине зависит от уровня напряжения постоянного тока шины постоянного тока.
24. Система по п. 12, в которой множество подсистем извлечения флюида содержит первый набор подсистем извлечения флюида и второй набор подсистем извлечения флюида, где первый набор подсистем извлечения флюида располагается в первой горизонтальной секции скважины, а второй набор подсистем извлечения флюида располагается во второй горизонтальной секции скважины.
25. Система по п. 12, в которой множество подсистем извлечения флюида содержит третий набор подсистем извлечения флюида, расположенный в вертикальной секции скважины.
26. Способ управления рабочими скоростями электрических машин в множестве подсистем извлечения флюида, соединенных с шиной постоянного тока для получения напряжения постоянного тока, при этом способ включает:
определение желаемой рабочей скорости электрической машины каждой из множества подсистем извлечения флюида;
определение максимальной рабочей скорости из определенных желаемых рабочих скоростей;
регулирование величины напряжения постоянного тока на шине постоянного тока на основе максимальной рабочей скорости таким образом, что по меньшей мере одна электрическая машина из электрических машин работает при максимальной рабочей скорости;
генерирование сигнала управления скоростью на основе желаемой рабочей скорости каждой электрической машины и желаемой величины сдвига по фазе, соответствующего желаемой рабочей скорости каждой электрической машины каждой из множества подсистем извлечения флюида; и
передачу сигнала управления скоростью в множество подсистем извлечения флюида таким образом, что электрическая машина каждой из множества подсистем извлечения флюида работает при соответствующей желаемой рабочей скорости.
27. Способ по п. 26, в котором рабочая скорость указывает скорость вращения ротора в электрической машине.
28. Способ по п. 26, в котором желаемую рабочую скорость электрической машины определяют на основе желаемой скорости потока флюида, подлежащего извлечению с помощью соответствующей подсистемы извлечения флюида из множества подсистем извлечения флюида.
29. Способ по п. 26, в котором величину напряжения постоянного тока определяют на основе зависимости между рабочей скоростью и напряжением постоянного тока на шине постоянного тока.
30. Способ по п. 26, в котором генерирование сигнала управления скоростью включает определение сдвига по фазе, соответствующего желаемой рабочей скорости электрической машины, для каждой из множества подсистем извлечения флюида.
31. Способ по п. 30, в котором генерирование сигнала управления скоростью дополнительно включает генерирование подкода уровня скорости для каждого сдвига по фазе, соответствующего желаемой рабочей скорости электрической машины, для каждой из множества подсистем извлечения флюида.
32. Способ управления электрической машиной, включающий:
прием электрического сигнала, указывающего угловое положение ротора электрической машины, от по меньшей мере одного датчика положения ротора;
генерирование сдвинутого по фазе электрического сигнала путем применения сдвига по фазе к электрическому сигналу, где величину сдвига по фазе определяют на основе по меньшей мере сигнала управления скоростью, указывающего заранее заданную скорость вращения ротора;
генерирование командного сигнала фазы на основе сдвинутого по фазе электрического сигнала; и
избирательную подачу фазного тока в одну или более из множества фазных обмоток на основе командного сигнала фазы таким образом, что ротор работает при заранее заданной скорости вращения.
33. Способ по п. 32, дополнительно включающий прием сигнала управления скоростью от контроллера, расположенного вне скважины.
34. Способ по п. 32, дополнительно включающий генерирование множества сигналов управления на основе командного сигнала фазы.
35. Способ по п. 34, дополнительно включающий применение широтно-импульсной модуляции к одному или более из множества сигналов управления на основе амплитуды фазного тока.
36. Способ по п. 34, в котором избирательная подача фазного тока включает избирательную подачу фазного тока в одну или более из множества фазных обмоток на основе множества сигналов управления.
| СПОСОБ УПРАВЛЕНИЯ НЕФТЕГАЗОВОЙ СКВАЖИНОЙ | 2013 |
|
RU2558088C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| Сушилка | 1934 |
|
SU45213A1 |
| JP 2012090464 A, 10.05.2012 | |||
| US 2013113400 A1, 09.05.2013 | |||
| US 2013285586 A1, 31.10.2013 | |||
| CN 103098366 A, 08.05.2013 | |||
| N-КОНЦЕВОЕ ПОЛИСИАЛИЛИРОВАНИЕ | 2007 |
|
RU2432175C2 |
| Способ диагностики глаукомы | 1985 |
|
SU1316672A1 |

