Изобретение относится к области электротехники, а именно, к конструкциям, элементам конструкций телеметрических систем, используемых при бурении наклонных и горизонтальных скважин.
Из уровня техники известна Система внутрискважинного линейного соленоидного исполнительного привода, которая содержит контроллер, соленоидный исполнительный привод с соленоидом и соответствующим якорем соленоида, к соленоиду присоединено множество переключателей, контроллер электрически присоединен к множеству переключателей и имеет процессор и запоминающее устройство, связанное с процессором, запоминающее устройство содержит набор команд, которые при выполнении процессором вызывают получение процессором сигнала обратной связи, соответствующего состоянию, по меньшей мере, одного из: соленоида и якоря соленоида, и генерирование сигнала управления для изменения состояния, по меньшей мере, одного из множества переключателей, основанного, по меньшей мере, частично на полученном сигнале обратной связи (патент РФ №2667890, Е21В 41/00, 47/12, H01F 7/16, оп.25.09.2018 г.).
Описанная выше Система позволяет управлять линейным соленоидом с якорем соленоида только с обратной связью посредством набора команд в запоминающем устройстве, но не предусматривает контроль параметров, измеренных в процессе бурения, и управления работой элементов погружаемой части телеметрической системы, снижение потребления питания погружаемой части, контроль за вибрациями, воздействующими на модуль и предупреждение аварийных ситуаций посредством контроля внутренней шины устройства.
Известен Блок управления соленоидом, содержащий печатную плату, имеющую микроконтроллер и схемы, обеспечивающие диагностику параметров состояния и управление, и модуль энергонезависимой памяти (патент РФ №2792297, H05K 7/02, H01F 7/18, F16K 31/06, оп.21.03.2023 г., прототип).
Недостатком конструкции является то, что структура и функции электронных компонент блока не раскрываются, что делает невозможным использование данного блока для управления соленоидом, а также недостатком данного блока управления - пониженная надежность блока управления соленоидом при температурах выше 85°С и отсутствие контроля внутренней шины обмена в процессе бурения и контроль за вибрациями, воздействующими на модуль.
Технический результат состоит в повышении надежности и устойчивости работы погружаемой части телеметрической системы в процессе бурения посредством контроля параметров, измеренных в процессе бурения, и управления работой элементов погружаемой части телеметрической системы, обеспечивая:
своевременное отключение и включение источника питания погружаемой части при обнаружении короткого замыкания, защищая источник питания от него;
снижение потребления питания погружаемой части, используя источники питания погружаемой части с наилучшими режимами работы по отношению к ранее использованных их режимов работ;
контроль за вибрациями, воздействующими на Устройство контроля внутренней шины обмена в процессе бурения;
управление соленоидом.
Технический результат достигается тем, что Устройство контроля внутренней шины обмена в процессе бурения выполнено в виде печатной платы, содержащей микроконтроллер и схемы, соединенные с возможностью проведения диагностики параметров состояния, управления и сохранение информации в энергонезависимую память по линии связи от микроконтроллера, с возможностью электрического проводного соединения с соленоидом, источниками питания в виде трех батарей, модулем инклинометрии, резистивиметром и модулем гамма-каротажа погружаемой части телеметрической системы для обеспечения их контроля и управления, при этом схемы представляют собой схему измерения и управления источниками питания погружаемой части, включающую в себя схему измерения питания погружаемой части и схему управления и защиты погружаемой части, схему измерения и управления первой батареи, включающую в себя схему измерения питания первой батареи и схему управления питанием от первой батареи, схему измерения и управления второй батареей, включающую в себя схему измерения питания второй батареи и схему управления питанием от второй батареи, схему измерения и управления третьей батареи, включающую в себя схему измерения питания третьей батареи и схему управления питанием от третьей батареи, схему измерения и управления соленоидом, включающую в себя схему измерения тока в цепи соленоида и схему управления соленоидом, схему приемника внутренней шины, схему приемника кодового сигнала, схему измерения вибраций и схему энергонезависимой памяти, при этом схемы соединены с микроконтроллером посредством линии связи, обеспечивая прямую и обратную связь, а схемы, представляющие собой схему измерения и управления источниками питания погружаемой части, схему измерения и управления первой батареи, схему измерения и управления второй батареей и схему измерения и управления третьей батареи, соединены между собой и схемой измерения и управления соленоидом посредством линии связи, обеспечивая прямую и обратную связь.
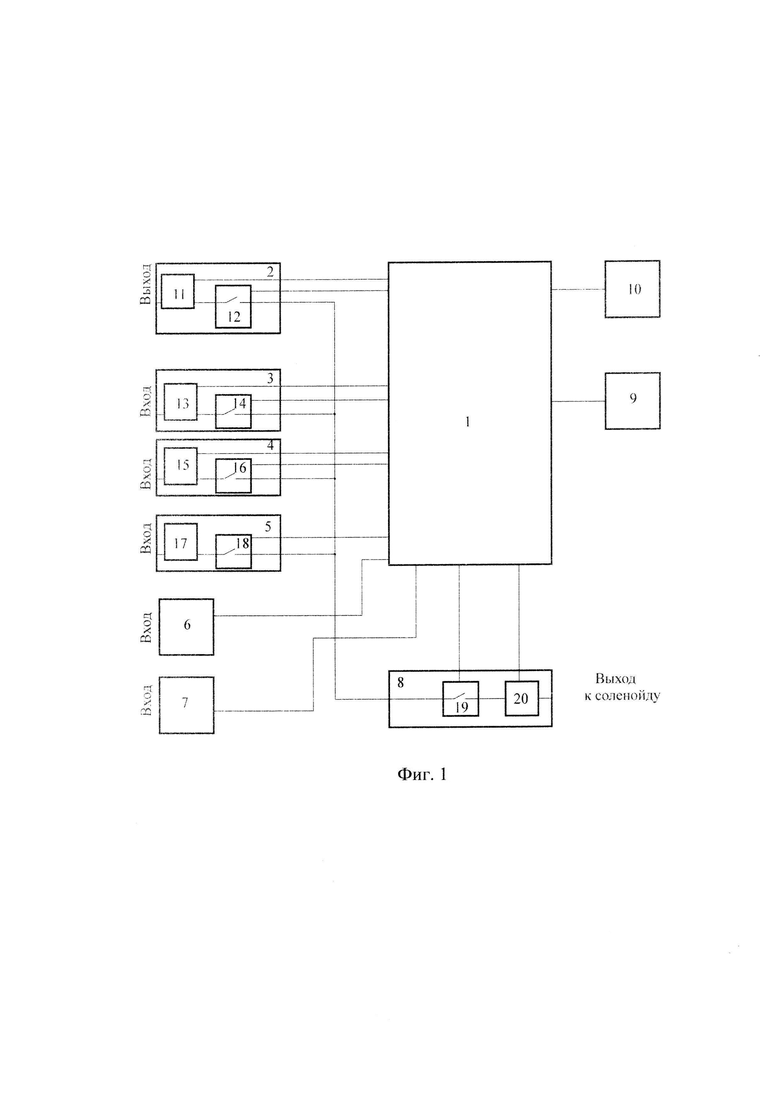
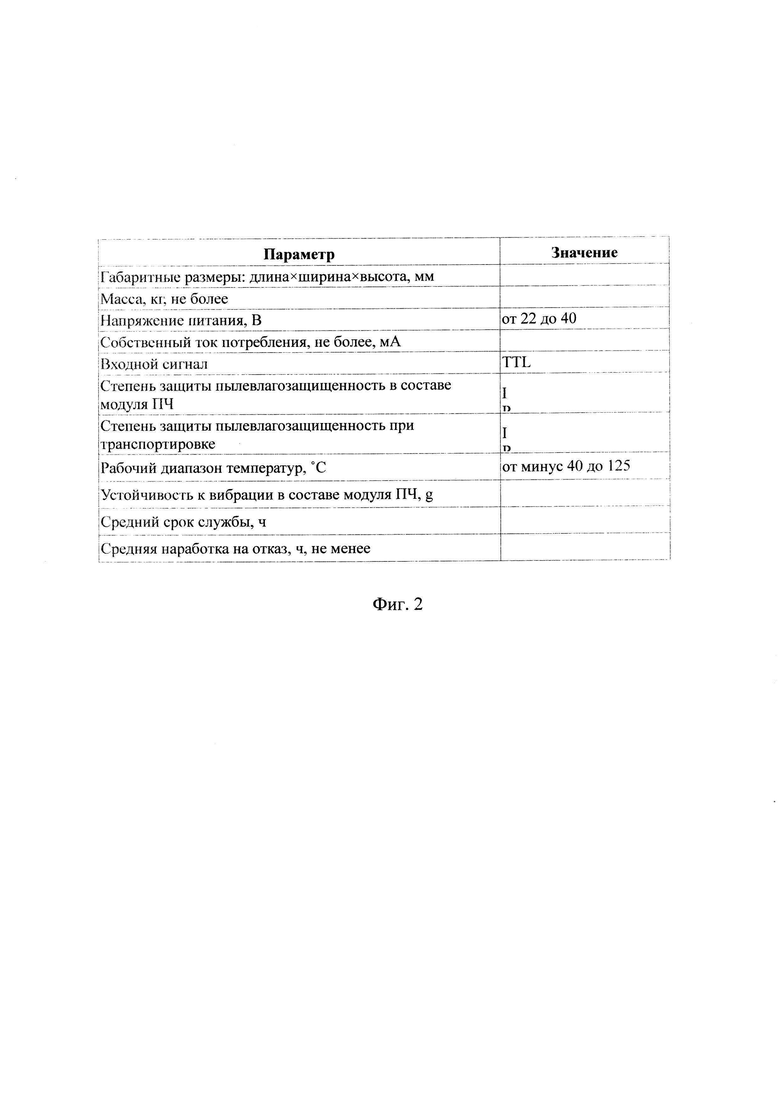
На фиг. 1 представлена структурная схема Устройства контроля внутренней шины обмена в процессе бурения, на фиг. 2 представлена Таблица основных технических характеристик Устройства контроля внутренней шины обмена в процессе бурения, на фиг. 3 представлена структурная схема буровой и телеметрической системы «Атлас» (пример).
Обозначения на фигурах:
1 - микроконтроллер;
2 - схема измерения и управления источниками питания погружаемой
части;
3 - схема измерения и управления первой батареи;
4 - схема измерения и управления второй батареи;
5 - схема измерения и управления третьей батареи;
6 - схема приемника внутренней шины;
7 - схема приемника кодового сигнала;
8 - схема измерения и управления соленоидом;
9 - схема измерения вибраций;
10 - схема энергонезависимой памяти;
11 - схема измерения питания погружаемой части;
12 - схема управления и защиты погружаемой части;
13 - схема измерения питания первой батареи;
14 - схема управления питанием от первой батареи;
15 - схема измерения питания второй батареи;
16 - схема управления питанием от второй батареи.
17 - схема измерения питания третьей батареи;
18 - схема управления питанием от третьей батареи;
19 - схема измерения в цепи соленоида;
20 - схема управления соленоидом;
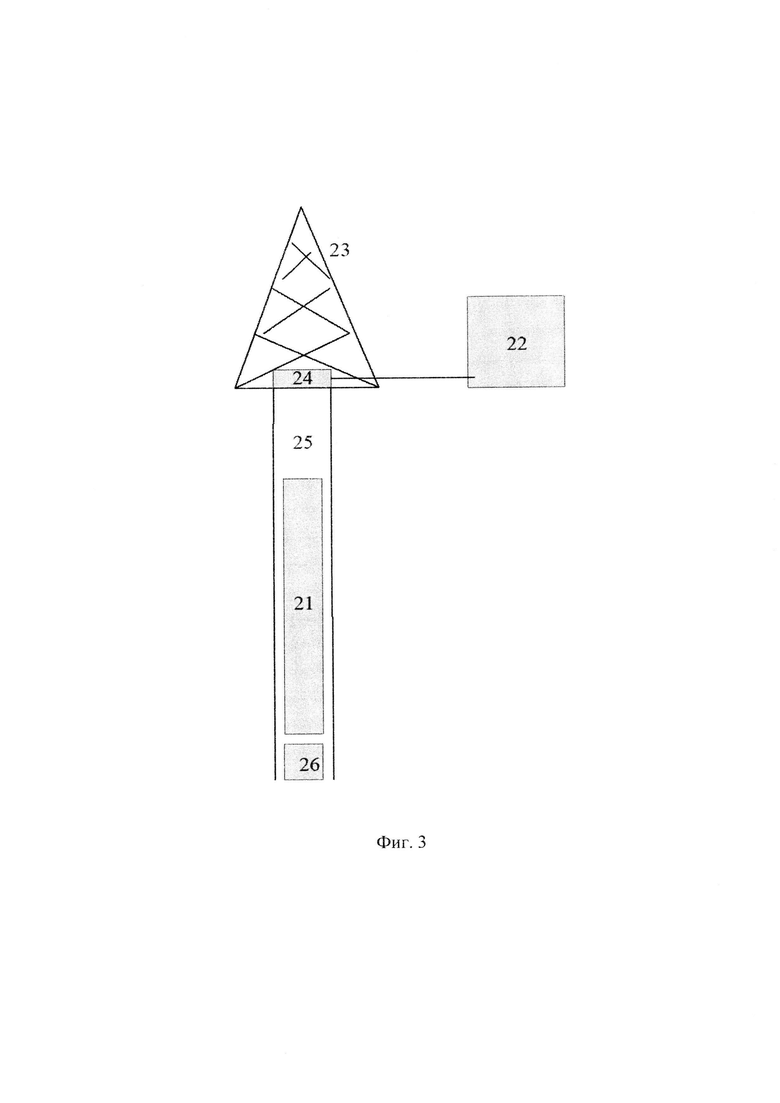
21 - телеметрическая система погружаемая часть;
22 - телеметрическая система наземная часть;
23 - буровая;
24 - датчики давления;
25 - скважина;
26 - буровое долото.
Телеметрическая система, например,» Атлас», включает в себя наземную и погружаемую части, осуществляет измерение навигационных и геофизических параметров в процессе бурения и передачи данных в реальном времени по гидравлическому каналу связи, обеспечивающим оперативное определение траектории бурения скважины, при этом наземная часть включает в себя, в том числе и программное обеспечение, а погружаемая часть включает в себя пульсатор с Устройством контроля внутренней шины обмена в процессе бурения и соленоидом, источники питания погружаемой части телеметрической системы в виде трех батарей, модуль инклинометрии, соединенный с источниками питания, резистивиметр, соединенный с модулем инклинометрии посредством телескопического соединения, и модуль гамма-каротажа, соединенный с резистивиметром (на фиг. не показано),
Устройство контроля внутренней шины обмена в процессе бурения (далее по тексту - «Устройство») осуществляет
диагностику параметров состояния элементов погружаемой части телеметрической системы, в том числе и измерение вибраций, воздействующих на Устройство и, соответственно, на погружаемую часть телесистемы,
контроль за параметрами, измеренными в процессе бурения, за элементами погружаемой части телеметрической системы, за вибрациями, воздействующими на Устройство, для предупреждение аварийных ситуаций,
управление работой элементов погружаемой части телеметрической системы для снижения, в том числе и потребления питания погружаемой части,
и сохранение информации в энергонезависимой памяти. Элементы погружаемой части телеметрической системы включают в себя:
источниками питания в виде трех батарей, модуль инклинометрии, резистивиметр и модулем гамма-каротажа.
Устройство выполнено в виде печатной платы, содержащей микроконтроллер 1 и схемы, с возможностью электрического проводного соединения с соленоидом, источниками питания в виде трех батарей, модулем инклинометрии, резистивиметром, соединенным с модулем инклинометрии и модулем гамма-каротажа, обеспечивая их взаимодействие для контроля параметров, измеренных в процессе бурения, и управления работой элементов погружаемой части телеметрической системы.
Схемы представляют собой:
- схему 2 измерения и управления источниками питания погружаемой части (далее по тексту - «Схема 2»), включающую в себя схему 11 измерения питания погружаемой части (далее по тексту - «Схема 11»), и схему 12 управления и защиты погружаемой части (далее по тексту - «Схема 32»),
- схему 3 измерения и управления первой батареи (далее по тексту - «Схема 3»), включающую в себя схему 13 измерения питания первой батареи (далее по тексту - «Схема 13») и схему 14 управления питанием от первой батареи (далее по тексту - «Схема 14»),
- схему 4 измерения и управления второй батареи (далее по тексту -«Схема 4»), включающую в себя схему 15 измерения питания второй батареи (далее по тексту - «Схема 15») и схему 16 управления питанием от второй батареи (далее по тексту - «Схема 16»),
- схему 5 измерения и управления третьей батареи (далее по тексту - «Схема 5»), включающую в себя схему 17 измерения питания третьей батареи (далее по тексту - «Схема 17») и схему 18 управления питанием от третьей батареи (далее по тексту - «Схема 18»),
- схему 8 измерения и управления соленоидом (далее по тексту - «Схема 8»), включающую в себя схему 19 измерения тока в цепи соленоида (далее по тексту - «Схема 19») и схему 20 управления соленоидом (далее по тексту - «Схема 20»),
- схему 6 приемника внутренней шины (далее по тексту - «Схема 6»),
- схему 7 приемника кодового сигнала (далее по тексту - «Схема 7»),
- схему 9 измерения вибраций (далее по тексту - «Схема 9») и схему 10 энергонезависимой памяти (далее по тексту - «Схема 10»).
Схемы со 2 по 20 соединены с микроконтроллером 1 посредством линии связи, например, в виде дорожки на печатной плате, с возможностью обеспечения прямой и обратной связи между ними, осуществляя диагностику параметров состояния элементов погружаемой части телеметрической системы, таких как напряжение, ток, состояния элементов погружаемой части телеметрической системы, в том числе и измерение вибраций, воздействующих на Устройство и, соответственно, на погружаемую часть телесистемы.
Схемы, представляющие собой схему 2, схему 3, схему 4 и схему 5, соединены между собой и схемой 8 посредством линии связи, например, в виде дорожек на печатной плате, обеспечивая прямую и обратную связь между ними и схемой 8.
Микроконтроллер 1 обеспечивает совместно со схемами 2-20 организацию канала связи между погружаемой частью и наземной частью забойной телесистемы,
контроль и управление соленоидом, источниками питания, модулем инклинометрии, резистивиметром и модулем гамма-каротажа погружаемой части телеметрической системы,
диагностику параметров состояния элементов погружаемой части телеметрической системы, в том числе и как вибрации воздействуют на Устройство и, соответственно, на погружаемую часть телесистемы,
контроль за параметрами, измеренными в процессе бурения, за элементами погружаемой части телеметрической системы, за вибрациями, воздействующими на Устройство, для предупреждение аварийных ситуаций,
управляет работой элементов погружаемой части телеметрической системы
и сохраняет информацию в энергонезависимой памяти.
Для этого в программе микроконтроллера 1 предварительно заложены расчетные данные параметров, ограничивающие потребление тока погружаемой частью, моточасов и расход каждой из батарей питания, короткого замыкания погружаемой частью и/или соленоида по отдельности, которые сравнивают с текущими измеренными данными, полученными в режиме реального времени в процессе бурения для диагностики параметров состояния соленоида, источников питания, модуля инклинометрии, рези ставим етра и модуля гамма-каротажа и Устройства и по результатам сравнения принимает решение на выдачу управляющего сигнала, управляя работой соленоида, источников питания, модуля инклинометрии, резистивиметра и модуля гамма-каротажа погружаемой части телеметрической системы.
Микроконтроллер 1 также осуществляет контроль за потреблением питанием погружаемой части,
контроль за напряжением каждой батареи по отдельности и возможность включения или отключения каждой батареи по отдельности;
контроль короткого замыкания погружаемой частью и/или соленоида по отдельности,
определение обрыва линии питания погружаемой частью и/или соленоида пульсатора;
защиту питания модулей инклинометрии при коротком замыкании соленоида;
возможность отключения питания соленоида, при определении его короткого замыкания, с сохранением питания погружаемой части;
возможность ручного перезапуска сборки погружаемой части посредством включения или выключения потока бурового раствора или вращением колонны;
измерение вибраций, воздействующих на Устройство внутренней шины обмена в процессе бурения;
сохранение информации и событий в энергонезависимой памяти, в том числе и в виде предварительно заложенных расчетных данных параметров, измеренных текущих данных параметров, таких как:
данные напряжения и тока каждой батареи по отдельности, данные моточасов и расхода каждой из батарей питания, данные момента короткого замыкания погружаемой части и/или соленоида, данные момента обрыва линии питания погружаемой части и/или соленоида, значения вибраций, действующих на Устройство, данные температура окружающей среды и текущего времени.
Схема 11 отвечает за измерение напряжения и тока, протекающих в цепи питания погружаемой части и передачу измеренных значений по последовательной линии связи, обеспечивающей распространение сигнала от схемы 2 в микроконтроллер 1 посредством проводников,
схема 12 по управляющей команде - сигналу от микроконтроллера 1, включает или отключает питание погружаемой части и в случае превышения установленного тока потребления обеспечивает отключение питания от погружаемой части.
Схема 13 отвечает за измерение напряжения и тока, протекающих в цепи первой батареи, и передачу измеренных значений напряжения и тока по последовательной линии связи в микроконтроллер 1,
схема 14 по управляющей команде - сигналу от микроконтроллера 1 включает или отключает питание от первой батареи.
В случае обнаружения микроконтроллером 1 короткого замыкания или превышения установленного тока потребления, микроконтроллер 1 отключает первую батарею от потребителя, защищая первую батарею от критического тока разряда.
Схема 15 отвечает за измерение напряжения и тока, протекающих в цепи второй батареи, и передачу измеренных значений напряжения и тока по последовательной линии связи в микроконтроллер 1,
схема 16 по управляющей команде - сигналу от микроконтроллера i включает или отключает питание от второй батареи.
В случае обнаружения микроконтроллером 1 короткого замыкания или превышения установленного тока потребления, микроконтроллер 1 отключает вторую батарею от потребителя, защищая вторую батарею от критического тока разряда.
Схема 17 отвечает за измерение напряжения и тока, протекающего от третьей батареи, и передачу измеренных значений напряжения и тока по последовательной линии связи в микроконтроллер 1,
схема 18 по управляющей команде - сигналу от микроконтроллера 1 включает или отключает питание от третьей батареи. В случае обнаружения короткого замыкания или превышения установленного тока потребления, отключает третью батарею от потребителя, защищая ее от критического тока разряда.
Схема 6 обеспечивает:
прием сигнала проводной линии связи для защиты Устройства от помех, которые могут возникнуть в проводной линии связи между элементами погружаемой части телеметрической системы и могут вывести из строя все Устройство;
защиту Устройство от перенапряжения в батареях погружаемой части 21;
согласование уровней - уровня напряжения проводной линии связи и уровня проводной линии связи для микроконтроллера 1 для обеспечения передачи информации о данных измеряемых параметров в микроконтроллер 1, программа которого дешифрует и анализирует, в том числе и сравнивая информацию, поступающую по проводной линии связи, измеряемых параметров в соответствии с программой в микроконтроллере 1.
Схема 7 обеспечивает:
прием сигнала кодовой информации для защиты Устройство от помех, которые могут возникают в проводной линии связи между элементами погружаемой части телеметрической системы и могут вывести из строя все Устройство;
защиту Устройства от перенапряжения в источниках питания погружаемой части 21;
согласование уровней - уровня напряжения проводной линии связи и уровня проводной линии связи для микроконтроллера 1 для обеспечения передачи сигнала кодовой информации измеряемых параметров в микроконтроллер 1, программа которого дешифрует и анализирует, в том числе и сравнивая информацию, поступающую по кодовому сигналу, в соответствии с программой микроконтроллера 1.
Схема 19 обеспечивает измерение тока, протекающих в цепи соленоида, и передачу измеренных значений тока в микроконтроллер 1,
схема 20 по управляющей команде - электрическому сигналу от микроконтроллера 1 управляет соленоидом, который в ответ на электрический импульс от микроконтроллера 1 открывает или закрывает гидравлический канал связи, соединяющий наземную и погружаемую части телесистемы, в зависимости от данных параметров, предварительно заложенных в программе микроконтроллера 1 для обеспечения передачи кодовой информации на поверхность скважины 25.
Схема 9 обеспечивает измерение значений вибрации, воздействующих на Устройство, с помощью трех-осевого акселерометра, входящего в схему 9 (на фиг. не показано), и передачу этих значений по последовательной линии связи в микроконтроллер 1.
Схема 10 обеспечивает сохранение, определенных программой микроконтроллера 1, в том числе и измеряемых параметров, в энергонезависимую память по последовательной линии связи от микроконтроллера 1.
Например,
в случае сбоя в работе телесистемы, программа микроконтроллера 1, осуществляют перезагрузку телесистемы без необходимости дополнительной спускоподъемной операции,
обеспечивается возможность ручного перезапуска сборки (включением или выключением потока бурового раствора или вращением колонны), измеряя вибрации, воздействующие на Устройство и сохранение их в энергонезависимой памяти 10;
обеспечивается возможность журналирования - сохранения событий в энергонезависимой памяти 10, таких как: напряжение и ток в каждой батареи по отдельности, моточасы и расход каждой из батарей питания, момент короткого замыкания погружаемой части и/или соленоида, момент обрыва линии питания погружаемой части и/или соленоида, значения вибраций, действующих на Устройство, температуры окружающей среды и текущего времени.
Устройство контроля внутренней шины обмена в процессе бурения работает следующим образом:
Устройство посредством соответствующих входов схем 3, 4 и 5 подключают к первой, второй и третьей батареям посредством проводной линии связи, при подключении включаются схемы 13, 15 и 17, которые информацию о напряжении и силе тока первой, второй и третьей батареях в режиме реального времени передают в микроконтроллер 1.
Программа микроконтроллера 1 сравнивает полученные данные параметров посредством схем 13, 15 и 17 с предварительно заложенными данными параметров в микроконтроллер 1 и по результату сравнений выдает управляющие сигналы на схемы 14, 16 и 18, включая или отключая источники питания погружаемой части, все или по отдельности, согласно предварительно заложенной в микроконтроллер 1 программе.
Информация о параметрах от схем 13, 15 и 17 в микроконтроллер 1 и сигналы управления из микроконтроллера 1 на схемы 14, 16 и 18 поступают по связи в виде дорожек на печатной плате.
После включения схем 14, 16 и 18 микроконтроллер 1 выдает сигнал по линии связи на схему 12 для подачи питания на модуль инклинометрии, резистивиметр и модуль гамма-каратожа по проводной линии связи.
После включения питания погружаемой части 21 схема 11 измеряет напряжение и ток потребления.
После подачи питания на модуль инклинометрии, резистивиметр и модуль гамма-каротажа, микроконтроллер 1 посредством схемы 6 дешифрует принятую информацию о состоянии модуля инклинометрии, резистивиметра и модуля гамма-каротажа, что обеспечивает полную и достоверную информацию о состоянии модуля инклинометрии, резистивиметра и модуля гамма-каротажа - корректной их работе, также микроконтроллер 1 принимает кодовую информацию, через схему 7, модуля инклинометрии и в зависимости от данных, предварительно заложенных в программе микроконтроллера 1, через схему 8, выдает управляющие сигналы на соленоид, который передает кодовую информацию на поверхность скважины 25, что отслеживает датчик давления 24, и передает кодовую информацию в наземную часть телесистемы в программное обеспечение.
В случае прекращения дешифрации информации на схеме 6 в течении времени предварительно заложенного в программе микроконтроллера 1, микроконтроллер 1 принимает решение о перезагрузке погружаемой части с целью восстановления связи с модулем инклинометрии, резистивиметром и модулем гамма-каротажа, для этого микроконтроллер 1 подает сигнал на схему 12 для выключения напряжения питания в течении заложенного в программе микроконтроллера 1 времени и затем опять подает сигнал на включение напряжения питания погружаемой части.
Схема 9 обеспечивает измерение значений вибрации, воздействующих на Устройство контроля внутренней шины обмена в процессе бурения, с помощью трех-осевого акселерометра, входящего в схему измерения вибраций, и передачу этих значений по последовательной линии связи в микроконтроллер 1, для последующей записи их в энергонезависимую память 10, откуда эти данные могут быть считаны для анализа после подъема модуля на поверхность.
Схема 10 обеспечивает сохранение определенных программой микроконтроллера 1 измеряемых параметров в энергонезависимую память по последовательной линии связи от микроконтроллера 1, откуда эти данные могут быть считаны, при помощи специального оборудования, для анализа после подъема модуля на поверхность.
Заявленное Устройство контроля внутренней шины обмена в процессе бурения повышает надежность и устойчивость работы погружаемой части телеметрической системы в процессе бурения посредством контроля, измерений и управления элементами погружаемой части, в том числе источниками питания, соленоидом и модулями, обеспечивая:
своевременное отключение и включение источника питания погружаемой части при обнаружении короткого замыкания, защищая источник питания от короткого замыкания;
снижение потребления питания погружаемой части, используя источники питания погружаемой части с наилучшими режимами работы по отношению к ранее использованных их режимов работ;
контроль за вибрациями, воздействующими на Модуль контроля внутренней шины обмена в процессе бурения;
управление соленоидом.
Пример.
На скважине 25 размещена телесистема «Атлас» с наземной частью 22, погружаемой частью 21 и датчиком давления 24.
Погружаемая часть 21 включает в себя: модуль пульсатора, который состоит из соленоида, гидравлического клапана и устройства контроля внутренней шины, трех батарей; модуля инклинометрии; резистивиметра, модуля гамма-каротажа и Устройство.
Устройство посредством соответствующего выхода схемы 8 подключают к соленоиду. Далее посредством соответствующих входов и выходов схем 2,6 и 7 соответственно подключают к линии питания погружаемой части, к линиям внутренней шины и линии кодового сигнала. Далее посредством соответствующих входов схем 3, 4 и 5 подключают к первой, второй и третьей батареям (на фигуре 1 не показаны). После подключения трех батарей включаются схемы измерений первой 13, второй 15 и третьей 17 батарей и информация о напряжении, в режиме реального времени, предается в микроконтроллер 1, где сравнивается с информацией о напряжениях, предварительно заложенной в программе микроконтроллера 1:
напряжение не менее 22 В и не более 40 В,
если полученные данные не выходят за пределы данных, предварительно заложенных, в программе, то микроконтроллер 1 посредством управляющего сигнала на схемы управления батарей 14, 16 и 18 разрешает их использование в качестве источников питания для погружаемой части 21, в том числе и соленоида.
Кроме этого микроконтроллер 1 выдает управляющий сигнал на схему 12 для разрешения питания погружаемой части 21 от батарей. После включения питания погружаемой части 21 телеметрической системы схема 11 измеряет напряжение и ток потребления. После подачи питания на погружаемую часть 21 микроконтроллер 1 посредством схемы 6 дешифрует принятую информацию, по средствам схемы 12 измеряет напряжение и ток потребления и определяет работоспособность всей погружаемой части 21, также (или одновременно) микроконтроллер 1 принимает информацию через схему 7 и в зависимости от данных параметров (например, пусковой ток 1.5 А в течении 200 мс и последующий ток удержания 0,5 А), заложенных в программе, микроконтроллер 1 выдает управляющие сигналы на соленоид, который управляет гидравлическим клапаном, открывая или закрывая его, и кодовый сигнал передается на поверхность по гидроканалу (буровому раствору), где принимается датчиком давления 24, преобразуется в электрический сигнал и передается в программное обеспечение наземной части телеметрической системы.
Заявленное техническое решение позволяет повысить надежность и устойчивость работы погружаемой части телесистемы в процессе бурения посредством, в том числе контроля параметров, измеренных в процессе бурения, и управления работой элементов погружаемой части телеметрической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2509210C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 1997 |
|
RU2140539C1 |
| Устройство для контроля положения ствола горизонтальной скважины при бурении | 2020 |
|
RU2733536C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ | 2012 |
|
RU2490448C1 |
| Способ определения ориентации естественной трещиноватости горной породы | 2019 |
|
RU2722431C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 1994 |
|
RU2105880C1 |
| Компоновка низа бурильной колонны для бурения боковых стволов из горизонтальной части необсаженной скважины | 2019 |
|
RU2719875C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА С ГИДРАВЛИЧЕСКИМ КАНАЛОМ СВЯЗИ | 2004 |
|
RU2256794C1 |
| Система автоматизированного управления процессом бурения скважин | 2022 |
|
RU2790633C1 |
| СИСТЕМА И СПОСОБ ИССЛЕДОВАНИЙ В ПРОЦЕССЕ БУРЕНИЯ | 2004 |
|
RU2365751C2 |
Изобретение относится к области электротехники, а именно к конструкциям, элементам конструкций телеметрических систем, используемых при бурении наклонных и горизонтальных скважин. Технический результат состоит в повышении надежности и устойчивости работы погружаемой части телеметрической системы в процессе бурения посредством контроля параметров, измеренных в процессе бурения, и управления работой элементов погружаемой части телеметрической системы. Для этого устройство контроля внутренней шины обмена в процессе бурения выполнено в виде печатной платы, содержащей микроконтроллер и схемы, соединенные с возможностью проведения диагностики параметров состояния, управления и сохранения информации в энергонезависимую память по линии связи от микроконтроллера, с возможностью электрического проводного соединения с соленоидом, источниками питания в виде трех батарей, модулем инклинометрии, резистивиметром и модулем гамма-каротажа погружаемой части телеметрической системы для обеспечения их контроля и управления. 3 ил.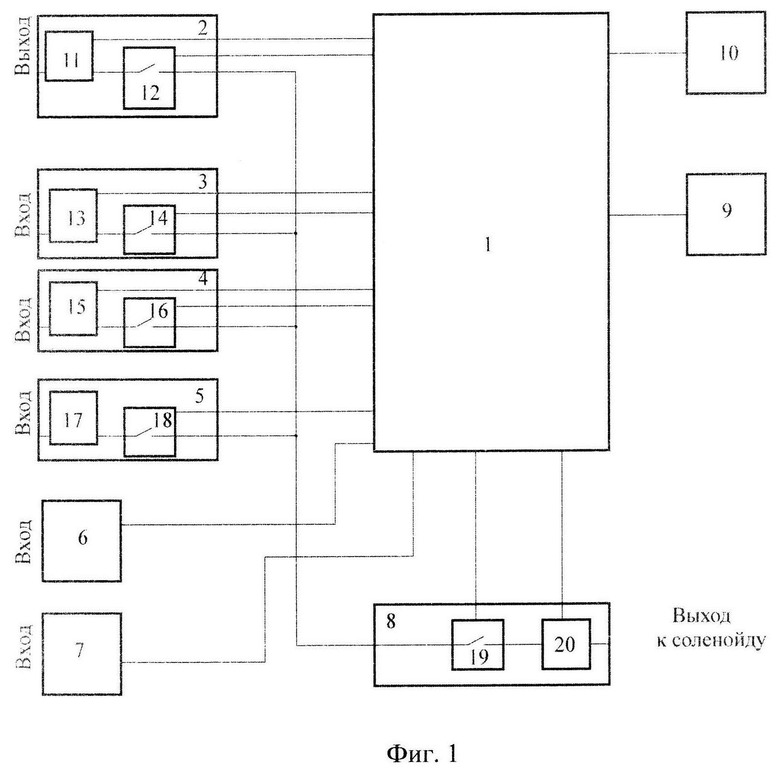
Устройство контроля внутренней шины обмена в процессе бурения, выполненное в виде печатной платы, содержащее микроконтроллер и схемы, соединенные с возможностью проведения диагностики параметров состояния и управления и сохранения информации в энергонезависимую память по линии связи от микроконтроллера, отличающееся тем, что выполнено с возможностью электрического проводного соединения с соленоидом, источниками питания в виде трех батарей, модулем инклинометрии, резистивиметром и модулем гамма-каротажа погружаемой части телеметрической системы для обеспечения их контроля и управления, при этом схемы представляют собой схему измерения и управления источниками питания погружаемой части, включающую в себя схему измерения питания погружаемой части и схему управления и защиты погружаемой части, схему измерения и управления первой батареи, включающую в себя схему измерения питания первой батареи и схему управления питанием от первой батареи, схему измерения и управления второй батареи, включающую в себя схему измерения питания второй батареи и схему управления питанием от второй батареи, схему измерения и управления третьей батареи, включающую в себя схему измерения питания третьей батареи и схему управления питанием от третьей батареи, схему измерения и управления соленоидом, включающую в себя схему измерения тока в цепи соленоида и схему управления соленоидом, схему приемника внутренней шины, схему приемника кодового сигнала, схему измерения вибраций и схему энергонезависимой памяти, при этом схемы соединены с микроконтроллером посредством линии связи, обеспечивая прямую и обратную связь, а схемы, представляющие собой схему измерения и управления источниками питания погружаемой части, схему измерения и управления первой батареи, схему измерения и управления второй батареи и схему измерения и управления третьей батареи, соединены между собой и схемой измерения и управления соленоидом посредством линии связи, обеспечивая прямую и обратную связь.
| Блок управления соленоидом | 2022 |
|
RU2792297C1 |
| СИСТЕМА ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ВНУТРИСКВАЖИННОГО СОЛЕНОИДНОГО ИСПОЛНИТЕЛЬНОГО ПРИВОДА | 2014 |
|
RU2664282C1 |
| СИСТЕМА ВНУТРИСКВАЖИННОГО ЛИНЕЙНОГО СОЛЕНОИДНОГО ИСПОЛНИТЕЛЬНОГО ПРИВОДА | 2015 |
|
RU2667890C1 |
| US 20120255739 A1, 11.10.2012. | |||

