Область техники, к которой относится изобретение
Настоящее изобретение относится к системе транспортного средства для обнаружения затенения его антенны, а также к способу использования этой системы.
Уровень техники
Для отслеживания состояния дороги и окружающей транспортное средство обстановки в автономных транспортных средствах могут быть использованы такие устройства, как радиолокационное устройство, лазерный локатор, камеры и т.д. Примерами объектов, находящиеся в окружающей транспортное средство обстановке, могут быть другие транспортные средства, пешеходы, различные конструкции, в том числе, мосты и здания, устройства для регулирования движения и т.д. Также на пути движения транспортного средства могут быть различные препятствия, включая конусы дорожного ограждения или посторонние предметы на полосах движения. Входные данные от датчиков, используемые при управлении движением в автономном режиме, позволяют транспортному средству объезжать подобные препятствия без вмешательства человека или практически без его вмешательства.
Раскрытие изобретения
Предложенная система может быть использована в радиолокационной системе, например, в транспортном средстве.
Система транспортного средства для обнаружения затенения антенны включает в себя антенну с подложкой и несколько антенных элементов, размещенных на подложке, и устройство обработки, выполненное с возможностью измерять апертурную функцию в апертуре антенны и определять, затенен ли по крайней мере один из антенных элементов, на основании, по крайней мере отчасти, измеренной апертурной функции.
Устройство обработки может быть выполнено с возможностью определять, что по крайней мере один из антенных элементов затенен, если диаграмма направленности излучения, полученная с помощью значения измеренной апертурной функции, искажена.
Устройство обработки может быть выполнено с возможностью получать диаграмму направленности излучения с боковыми лепестками, используя значение измеренной апертурной функции.
Устройство обработки может быть выполнено с возможностью определять, затенен ли крайней мере один из антенных элементов, исходя из значений уровней боковых лепестков на полученной диаграмме направленности излучения.
Апертурная функция может определяться, по крайней мере отчасти, набегом фазы и значением амплитуды в апертуре антенны.
Способ обнаружения затенения антенны транспортного средства состоит в том, что измеряют апертурную функцию в апертуре антенны и определяют, затенен ли по крайней мере один из антенных элементов, на основании, по крайней мере отчасти, измеренной апертурной функции.
При определении затенения антенного элемента могут определять, являются ли один или более измеренных набегов фазы нелинейным и/или одно или более значений измеренных амплитуд отклоняющимся от ожидаемого.
При определении затенения по крайней мере одного из антенных элементов могут получать диаграмму направленности излучения, используя значение апертурной функции, оценивают уровень бокового лепестка в полученной диаграмме направленности излучения и сравнивают значение оценочного уровня бокового лепестка со значением его фактического уровня.
В способе могут определять, затенен ли по крайней мере один из антенных элементов, на основании, по крайней мере отчасти, значения оценочного уровня бокового лепестка.
В способе могут определять, затенен ли по крайней мере один из антенных элементов, на основании, по крайней мере отчасти, набега фазы и/или значения амплитуды, полученных для апертурной функции.
Краткое описание чертежей
На фиг. 1 представлен пример системы транспортного средства для обнаружения затенения элемента антенны.
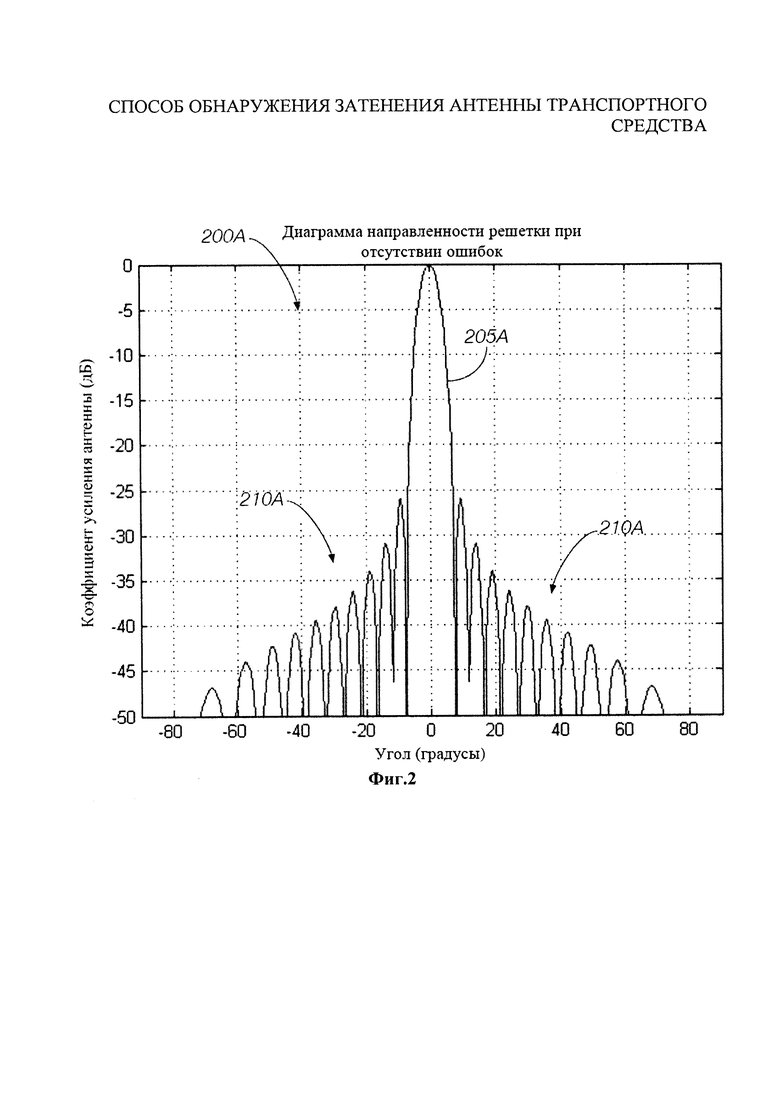
На фиг. 2 представлен пример диаграммы направленности антенны при отсутствии затенения.
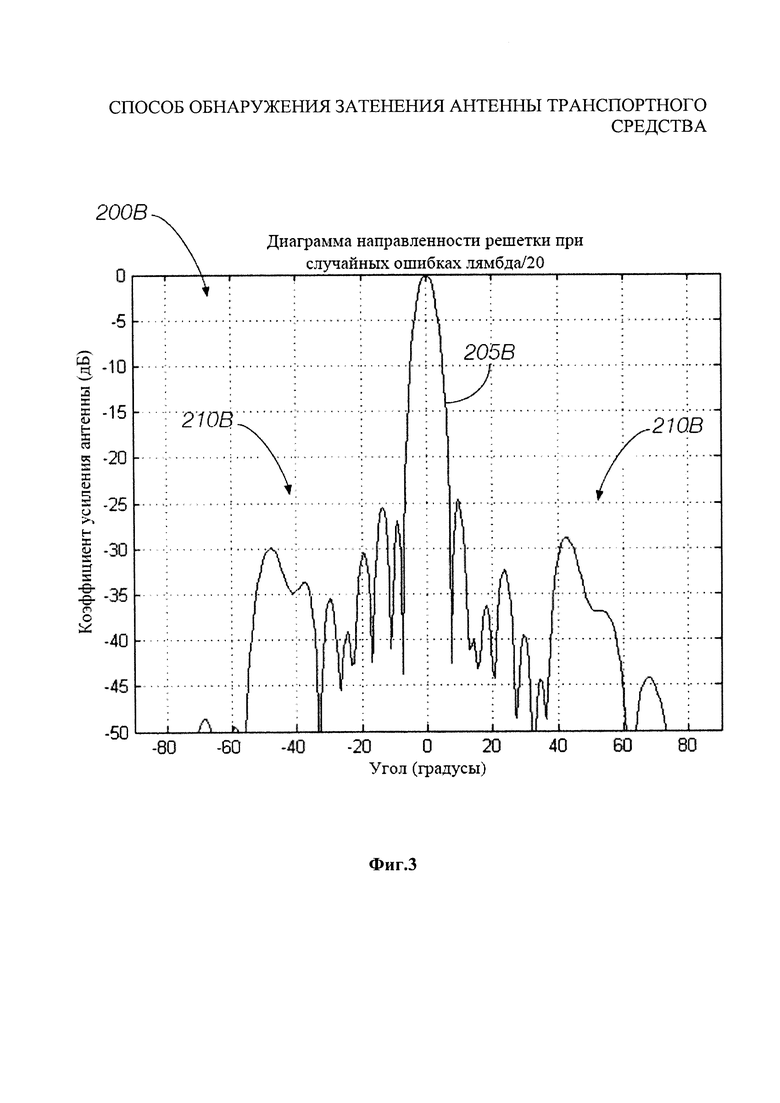
На фиг. 3 представлен другой пример диаграммы направленности антенны при отсутствии затенения.
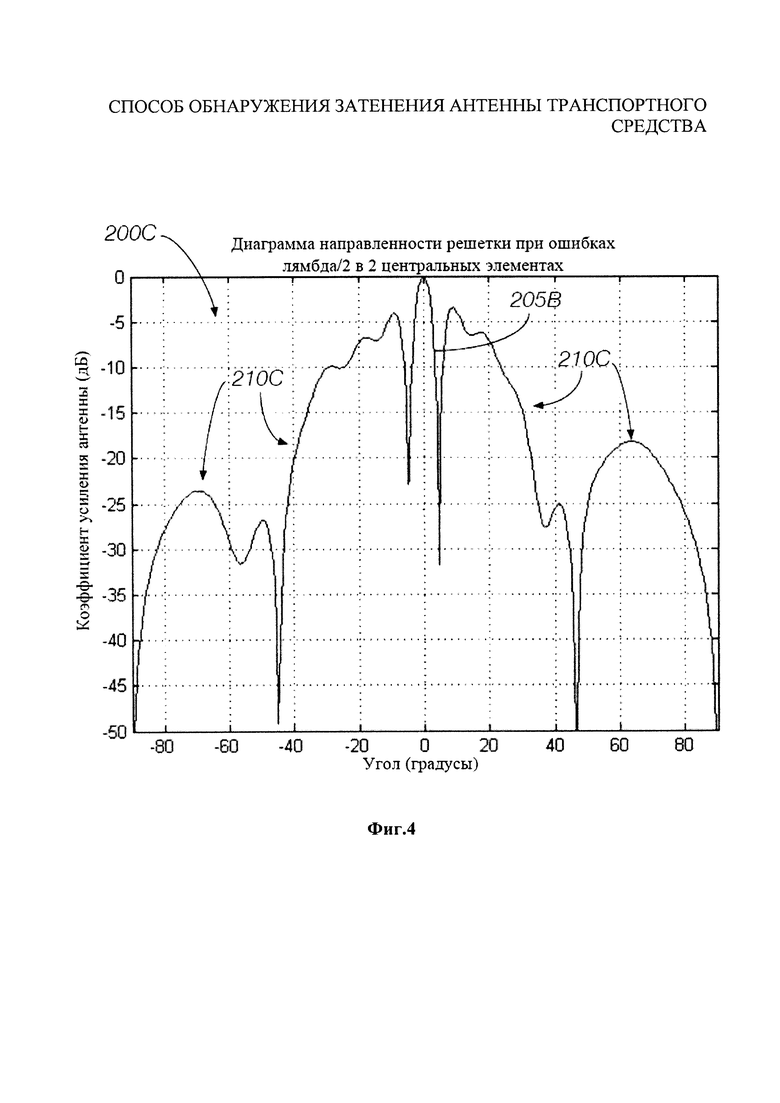
На фиг. 4 представлен пример диаграммы направленности антенны при затенении нескольких элементов.
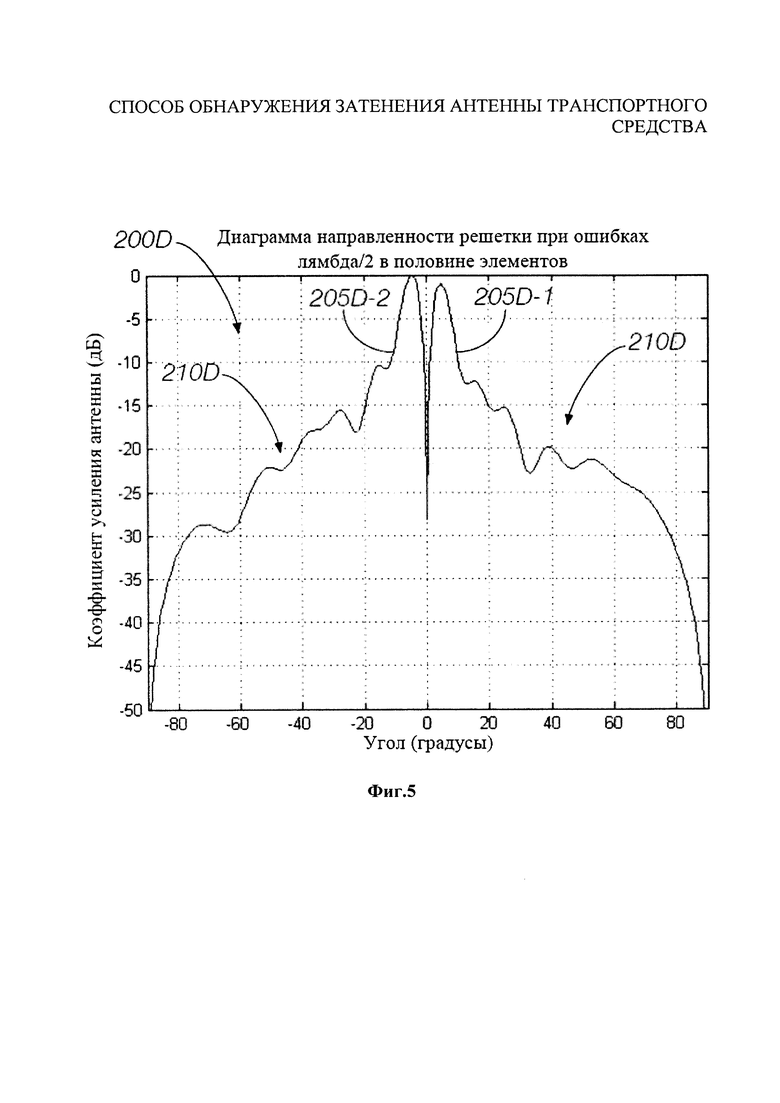
На фиг. 5 представлен другой пример диаграммы направленности антенны при затенении нескольких элементов антенны.
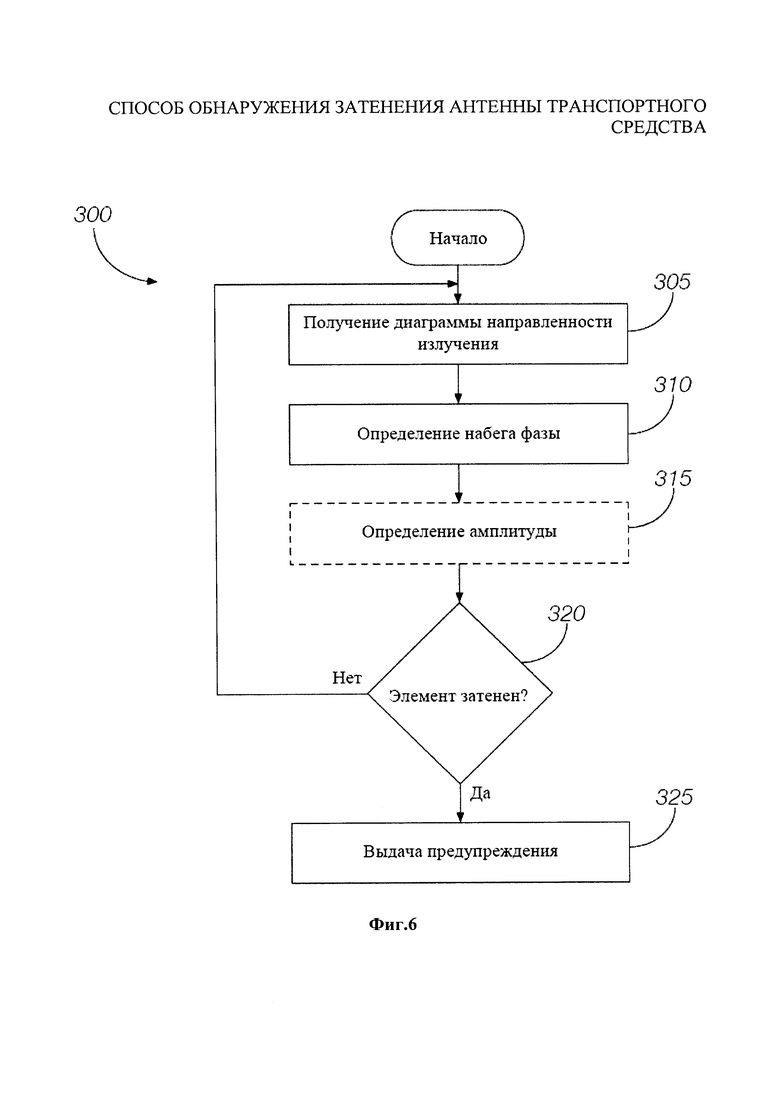
На фиг. 6 представлена блок-схема примера способа, который может быть использован для обнаружения затенения элемента антенны.
Осуществление изобретения
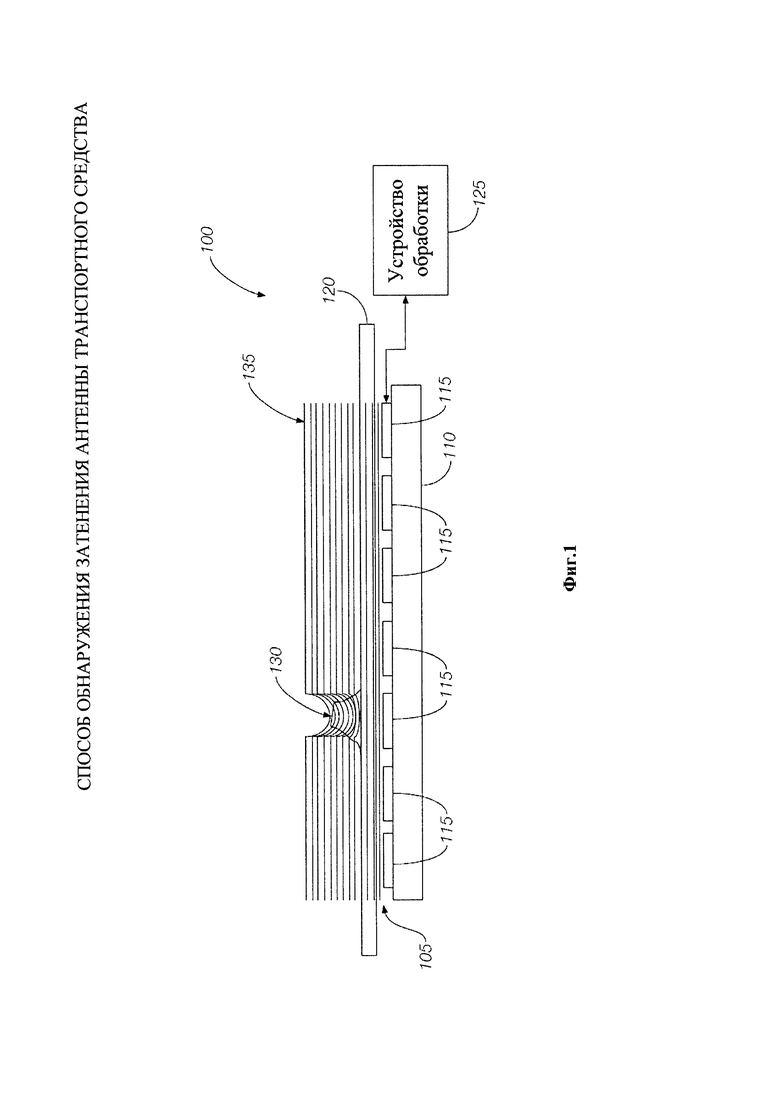
Как показано на фиг. 1, система 100 включает в себя антенну 105 с подложкой 110, элементы 115 антенны (антенные элементы) и обтекатель 120. Система 100 также включает в себя устройство 125 обработки. Система 100 может быть использована, например, в любом пассажирском или коммерческом автомобиле, в т.ч. в легковом автомобиле, грузовом автомобиле, внедорожнике, кроссовере, автобусе, поезде, воздушном судне и т.д.
Антенна 105 может быть выполнена с возможностью передачи и (или) приема электромагнитных волн, например, радиоволн, на одной или нескольких частотах. При работе антенны 105 в режиме передатчика осциллирующий ток создает вокруг нее магнитное и электрическое поля. Колебания магнитного и электрического полей могут распространяться от антенны 105 по воздуху и (или) через окружающую среду. При работе антенны 105 в режиме приемника осциллирующий ток создает вокруг нее магнитное и электрическое поля. Антенна 105 может быть использована в радиолокационной системе транспортного средства.
Подложка 110 может включать в себя диэлектрический материал, обеспечивающий электрическую изоляцию токоведущих частей, например, элементов 115 антенны, от земли (не показана). В некоторых возможных вариантах подложка 110 может быть поляризована под действием электрического поля. Диэлектрическая проницаемость подложки 110 может зависеть от различных факторов, включая частоту сигналов, передаваемых и (или) принимаемых антенной 105.
Элементы 115 антенны могут быть расположены на подложке 110, например, таким образом, чтобы образовывать решетку в апертуре антенны 105. Каждый элемент 115 может включать в себя токоведущую часть, например, из металла. Элементы 115 могут быть выполнены с возможностью генерирования осциллирующего магнитного и (или) электрического поля с помощью осциллирующего тока. Более того, во время работы в режиме приемника элементы 115 могут быть выполнены с возможностью генерирования осциллирующего тока с помощью магнитного и (или) электрического полей. В данном режиме магнитное и (или) электрическое поля позволяют построить «диаграмму направленности излучения».
Обтекатель 120 может быть выполнен с возможностью защиты элементов 115 антенны от непосредственного влияния посторонних предметов 130, а также льда, снега, грязи, земли и т.д. Обтекатель 120 может быть изготовлен из любого материала, имеющего высокую прозрачность для электромагнитных волн. Например, обтекатель 120 может быть изготовлен из стекловолокна, пластика, материала с покрытием из политетрафторэтилена (PTFE) и т.д.
Устройство 125 обработки может быть выполнено с возможностью измерения апертурной функции в апертуре (т.е. для приемных элементов 115). Полученная апертурная функция позволяет устройству 125 обработки определять, затенен ли по крайней мере один из элементов 115 антенны посторонними предметами 130. К посторонним предметам 130 можно отнести лед, снег, грязь, землю или другие материалы, которые могут скапливаться на обтекателе 120, расположенном над элементами 115, и блокировать сигналы, генерируемые элементами 115, или иным образом искажать волновой фронт 135. Таким образом, посторонние предметы 130 могут представлять собой любой материал, являющийся непрозрачным или иным образом ослабляющим электромагнитный сигнал, например, радиосигнал. Устройство 125 обработки может определить, что один или несколько элементов 115 затенены, если набег фазы, который может быть получен с помощью апертурной функции, является нелинейным. Устройство 125 обработки может определить, что один или несколько элементов 115 затенены, если локальное падение амплитуды или амплитудной функции значительно отклоняется от желательной весовой функции. Более того, устройство 125 обработки может строить диаграмму направленности излучения с боковыми лепестками, используя апертурную функцию, и обнаруживать нелинейность фазы и отклонения амплитуды путем сравнения оценочных (прогнозируемых) уровней боковых лепестков с реальными уровнями боковых лепестков, что будет подробно описано со ссылкой на фиг. 2-5 ниже. Однако следует отметить, что в некоторых подходах проверки апертурной функции для обнаружения затенения не нужно составлять диаграмму направленности излучения в явном виде. Например, затенение может быть обнаружено по резкому изменению набега фазы и определено по его величине. Аналогичным образом для обнаружения затенения могут быть использованы резкие изменения амплитуды. Таким образом, в соответствии с некоторыми примерами стандартное отклонение (или колебание) набега фазы от прямой линии (или отклонение амплитуды от желательной весовой функции) может позволить измерить или указать на наличие затенения.
В общем случае такие вычислительные системы и (или) устройства, как устройство 125 обработки, могут использовать операционную систему, включая, но не ограничиваясь этим, версии и (или) разновидности операционной системы Ford Sync®, операционной системы Microsoft Windows®; операционной системы Unix (например, операционной системы Solaris®, распространяемой компанией Oracle Corporation, г. Редвуд Шорз, Калифорния); операционной системы AIX UNIX, распространяемой компанией International Business Machines, г. Армонк, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc., г. Купертино, Калифорния, операционной системы BlackBerry, распространяемой компанией Research In Motion, г. Ватерлоо, Канада, и операционной системы Android, разработанной компанией Open Handset Alliance. Примеры вычислительных устройств включают в себя, не ограничиваясь этим, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный компьютер или карманный компьютер или некоторые другие вычислительные систему и (или) устройство.
Вычислительные устройства включают в себя машиночитаемые инструкции, при этом данные инструкции могут быть выполнены одним или несколькими вычислительными устройствами, например, устройствами, перечисленными выше. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и (или) технологий программирования, включая, но не ограничиваясь этим, языки Java, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, включая один или несколько процессов, приведенных в настоящем описании. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) может представлять собой любой энергонезависимый носитель (например, материальный носитель), предоставляющий данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором компьютера). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включающих в себя провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например, иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например, в одну из указанных выше систем, а доступ к ним осуществляется через сеть одним или несколькими любыми из существующих способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур, например, PL/SQL.
В некоторых вариантах воплощения изобретения элементы 115 системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций.
Антенна 105 может являться частью системы 100, например, радиолокационной системы, использующей доплеровскую импульсную модуляцию, и может передавать линейный ЧМ-импульс, обычно с высокой скоростью перестройки частоты (крутизной). При использовании доплеровской импульсной модуляции эхо-сигналы с линейной частотной модуляцией (ЛЧМ-сигналы) могут быть приняты или смешаны с исходным сигналом для сжатия и понижения частоты до уровня основной полосы частот. Сжатые сигналы могут быть оцифрованы и обработаны путем быстрого преобразования Фурье (БПФ), дискретного преобразования Фурье (ДПФ) и другого подходящего способа обработки или фильтрации сигналов, которые обеспечивают сжатие полученных частот, кодированных по дальности, в отдельные элементы разрешения по частоте, соответствующие расстоянию до объекта, от которого был принят эхо-сигнал. Данный способ можно назвать «быстрой» обработкой с помощью радиолокационных систем непрерывного излучения с частотной модуляцией (FMCW).
Процедура «быстрой» обработки может выполняться с достаточно высокой частотой для получения выборочного доплеровского спектра, основанного на ожидаемой максимальной относительной скорости радиолокационного устройства и целевого объекта (объектов). Сбор сжатых данных о дальности может осуществляться в рамках приема нескольких импульсов, при этом в каждом элементе разрешения по дальности для выбранного количества импульсов может быть выполнено быстрое преобразование Фурье, позволяющее определить спектр доплеровских частот, а также значения скоростей для каждого элемента разрешения по дальности. Количество обработанных импульсов позволяет определить достижимое разрешение в спектре доплеровских частот. Данный способ можно назвать «медленной» обработкой с помощью радиолокационных систем.
Перед началом выполнения быстрого преобразования Фурье данные могут быть сгруппированы в виде прямоугольной матрицы, после чего для завершения обработки данных о дальности и доплеровской частоте может быть выполнено двумерное быстрое преобразование Фурье. Кроме того, можно ограничить выполнение быстрого преобразования Фурье для доплеровских частот несколькими отдельными элементами разрешения по дальности, например, элементами разрешения по дальности, в которых амплитуда превышает пороговое значение обнаружения, указывающее на наличие целевого объекта. Что касается оценки достаточного отношения сигнал-шум, использование быстрого преобразования Фурье для значений дальности может быть ограничено элементами разрешения по доплеровским частотам, в которых обнаружение целевого объекта позволяет сократить объем операций обработки, выполняемых устройством 125 обработки.
При использовании двумерной матрицы данных, в которой в одном направлении указаны значения дальности до целевого объекта, а в другом направлении - значения относительной скорости сближения с целевым объектом, данный способ может быть выполнен для каждого элемента 115 (или группы элементов 115) антенны 105 и для собранных данных. Практически линейный набег фазы в конкретном элементе разрешения по дальности и доплеровской частоте для элементов 115 решетки в определенном направлении имеет уклон, пропорциональный углу отклонения от направления, нормального к раскрыву антенны, характерный для обнаружения целевого объекта в данном элементе разрешения.
Пропорциональность линейной фазы к угловому смещению может указывать на то, что угол пропорционален частоте, таким образом, на основании быстрого преобразования Фурье для направления работы элемента 115, например, для каждого элемента разрешения по дальности и доплеровской частоте, угловое направление для целевого объекта (объектов) в любом элементе разрешения по дальности и доплеровской частоте будет определяться как частотно-кодированный угол, значение которого может быть сжато в соответствующий элемент разрешения по частоте для быстрого преобразования Фурье. Сначала выполняется сбор необработанных данных, на основании которых формируется трехмерный «куб данных», после чего происходит обработка этих данных с помощью быстрого преобразования Фурье 3-го или любого другого порядка, поскольку процессы являются линейными.
В качестве альтернативы к другим способам обработки можно отнести метод Кейпона, который может быть использован для элементов 115 антенны 105, при этом выполняется взвешивание фазы и амплитуды в направлении элемента для формирования одного или нескольких лепестков с подавлением помех и контролем боковых лепестков. Также для оценки угла могут быть использованы способы высокого разрешения, в т.ч. MUSIC (алгоритм многосигнальной классификации), ESPRIT (оценка параметров сигнала через алгоритмы вращательных методов инвариантности) или метод максимального правдоподобия.
Производительность радиолокационных систем может снижаться в результате утечки энергии на приемник, что иногда вызвано отражениями из-за неполного соответствия между передающей антенной 105 и линией передачи, а также из-за расположения обтекателя 120 или других объектов (т.е. металлического буфера или пластиковой накладки на буфере автомобиля). Таким образом, для каждого элемента 115 антенны элемент разрешения по нулевой дальности и нулевой доплеровской частоте будет соответствовать большому сигналу утечки. Ожидаемая фаза данного сигнала в элементах 115 может иметь измеримый сдвиг (например, может наблюдаться некоторое отклонение от линейности, которое можно откалибровать), который может быть измерен при отсутствии затенения 130. При частичном затенении 130, которое может привести к увеличению уровней боковых лепестков антенны 105, формируемых путем обработки, можно ожидать нелинейный набег фазы для элементов 115. На практике резкие изменения набега фазы могут указывать на то, какие элементы 115 затенены. Проверка того, насколько элемент разрешения по нулевой дальности и нулевой доплеровской частоте в обрабатываемом кубе данных близок к калибровочному значению, может позволить обнаружить частичное затенение 130 антенны 105.
Разность амплитуд в элементе разрешения по нулевой дальности и нулевой доплеровской частоте может быть оценена на основании увеличения коэффициента отражения из-за диэлектрической неоднородности, вызванной наличием затенения 130. Даже если полученное значение будет меньше фазовой ошибки, данную разность амплитуд можно будет использовать для увеличения достоверности измерений, использующих значение фазы. Амплитуда может быть измерена для элемента разрешения по нулевой дальности и нулевой доплеровской частоте для каждого компонента 115 (или группы компонентов 115) в системе 100 антенны, использующей цифровое формирование диаграммы направленности, так же, как и при работе с значением фазы. Таким образом, можно получить общую апертурную функцию.
Данный способ обнаружения затенения 130 не зависит от конкретной ситуации. На практике целевые объекты обычно находятся на расстоянии, превышающем нулевую дальность, в противном же случае происходит обнаружение затенения, т.е. будет определено, что затенение 130 создается целевым объектом (хотя в данном случае более вероятно, что затенение 130 будет создавать более постоянный набег фазы за исключением тех случаев, когда целевой объект мал относительно апертуры антенны 105). Кроме того, способ будет обеспечивать обнаружение частичного затенения 130 после выполнения обработки одной или нескольких (небольшого количества) последовательностей импульсов, что делает его относительно простым по сравнению с другими способами. Даже в ситуации, когда в течение длительного времени в поле зрения радиолокационного устройства нет целевых объектов, обнаружение частичного затенения 130 можно будет выполнить очень быстро.
Для снижения частоты ложных срабатываний также можно использовать усовершенствованные способы отслеживания фазы для элементов 115. Усовершенствованные способы могут включать в себя обнаружение длительного нормального отклонения разности фаз от линейного изменения и определение наличия превышения заранее заданного или адаптивного порогового значения.
На фиг. 2-5 представлены примеры диаграмм направленности излучения, которые указывают на то, что ни один из элементов 115 не затенен посторонними предметами 130. Искажение, вызванное частичным или полным затенением 130, может быть обнаружено на основании относительно высокого или неожидаемого уровня бокового лепестка, также в некоторых случаях основной лепесток может быть разделен на два или более лепестков. Искажение может снизить дальность обнаружения радиолокационной системы, поскольку большее количество энергии переходит на боковые лепестки или распределяется между несколькими основными лепестками. Более того, искажение может привести к получению неправильного значения угла относительно целевых объектов из-за того, что обнаружение будет более вероятным в увеличенных областях боковых лепестков, в связи с чем при отсутствии целевых объектов в области основного лепестка предлагается контролировать уровни боковых лепестков. Также разделение основного лепестка может привести к образованию двух или более больших боковых лепестков с неправильными углами относительно ожидаемого основного лепестка, при этом в каждом из них будет обнаружен целевой объект, после чего вместо использования направления разделенного лепестка в качестве предпочтительного направления основного лепестка будет выбран угол относительно данного объекта.
На фиг. 2 представлена диаграмма 200А направленности излучения при отсутствии ошибок, которая может быть получена с помощью апертурной функции. Диаграмма 200А направленности излучения с фиг. 2 получена на основании апертурной функции, соответствующей ожидаемому линейному набегу фазы. Вокруг основного лепестка 205А расположены боковые лепестки 210A, уровень которых уменьшается по мере увеличения угла относительно основного лепестка 205А. На фиг. 3 представлен пример диаграммы направленности излучения, полученный по апертурной функции со случайными фазовыми ошибками, которые могут возникать при реальном использовании системы 100. В примере с фиг. 3 основной лепесток 205В есть, но уровень боковых лепестков 210В не уменьшается по мере увеличения угла относительно основного лепестка 205В. Тем не менее, можно оценить величину ослабевания уровней боковых лепестков 210В таким образом, чтобы уровень случайной ошибки можно было считать практически линейным. Следовательно, боковые лепестки 210В с фиг. 3 могут обеспечивать достаточно эффективное обнаружение затенения. Другими словами, диаграмма направленности излучения с фиг. 3 может свидетельствовать о получении неидеального, но вполне приемлемого результата. На фиг. 4 представлен пример диаграммы 200С направленности излучения с частичным затенением 130, в частности, с затенением 130 двух центральных элементов 115. На диаграмме 200С направленности излучения с фиг. 4 вокруг основного лепестка 205С показаны сильно искаженные боковые лепестки 210С, уровни которых не уменьшаются должным образом. Таким образом, диаграмма 200С направленности излучения соответствует апертурной функции с нелинейным набегом фазы и непостоянной амплитудой. На фиг. 5 представлен пример диаграммы 200D направленности излучения, в которой затенена примерно половина элементов 115 решетки. Основной лепесток 205D разделен на два основных лепестка 205D 1 и 205D 2. Амплитуды боковых лепестков также являются непостоянными, что также указывает на то, что диаграмма 200D направленности излучения соответствует апертурной функции с нелинейным набегом фазы.
На фиг. 6 представлена блок-схема примера способа 300, который может быть выполнен одним или несколькими компонентами системы 100 с фиг. 1, например, устройством 125 обработки.
На этапе 305 принятия решения устройство 125 обработки может определять апертурную функцию. Апертурная функция может быть измерена на основании радиочастотного сигнала, принятого антенной 105, в частности, элементами 115 антенны 105. Апертурная функция может быть определена для области рядом с элементами 115, что позволит определить, искажена ли апертурная функция из за наличия посторонних предметов 130 на одном или нескольких элементах 115. Апертурная функция может зависеть от величины набега фазы и амплитуды. Диаграмма направленности излучения может быть сгенерирована или получена на основании апертурной функции. Таким образом, искажение апертурной функции может быть представлено в виде искаженной диаграммы направленности излучения.
На этапе 310 устройство 125 обработки может определять набег фазы для апертурной функции в апертуре. Данный набег фазы может быть использован для получения диаграммы направленности излучения с основным лепестком (лепестками) и боковыми лепестками. Непостоянство или нелинейность набега фазы может привести к получению диаграммы направленности излучения с неожидаемыми изменениями основного лепестка и (или) боковых лепестков.
На этапе 315 устройство 125 обработки может определять амплитуду для апертурной функции в апертуре. Данные значения амплитуды также могут быть использованы для построения диаграммы направленности излучения. Непостоянство или нестандартность значений амплитуды может привести к получению диаграммы направленности излучения с неожидаемыми изменениями основного лепестка и (или) боковых лепестков. В некоторых вариантах осуществления этап 315 может быть пропущен.
На этапе 320 принятия решения устройство 125 обработки может определить, затенен ли элемент 115 в антенне 105 посторонними объектами 130, являющимися непрозрачными или иным образом ослабляющими электромагнитные сигналы, например, радиосигналы. Устройство 125 обработки может определить, что элемент 115 затенен посторонними предметами 130, если уровни боковых лепестков полученной диаграммы направленности излучения значительно отличаются от оценочных уровней боковых лепестков. Таким образом, определение того, затенен ли элемент 115 посторонними предметами 130, может включать в себя оценку уровней боковых лепестков в полученной диаграмме направленности излучения и сравнение оценочных уровней боковых лепестков с фактическими уровнями боковых лепестков. При обнаружении затенения элемента 115 способ 300 может перейти на этап 325. При отсутствии затеняемых элементов 115 способ 300 может вернуться на этап 305.
На этапе 325 водителю транспортного средства может быть отображено предупреждение или другое уведомление, содержащее информацию о том, что радиолокационная система может выдавать ненадежные результаты из-за затенения 130. Таким образом, радиолокационная система и любая система, которая использует радиолокационную систему, например, система автономного управления, может стать недоступной до тех пор, пока посторонние предметы 130 не будут удалены. Посторонние предметы 130 могут быть удалены человеком или без его участия. Например, дождь может смыть грязь или землю, скопившуюся на обтекателе 120, а лед на антенне 105 может растаять сам. В качестве альтернативы посторонние предметы 130 могут быть удалены человеком, например, водителем транспортного средства.
Что касается описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие процессы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов воплощения изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты воплощения и способы воплощения, отличные от указанных примеров, станут явными при ознакомлении с вышеприведенным описанием. Объем изобретения не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты воплощения изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области технологий, упоминаемых в данном описании изобретения, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
Данный способ раскрытия не должен рассматриваться как ограничение, касающееся того, что заявленные варианты воплощения данного изобретения требуют большего числа признаков, чем указано в каждом пункте формулы. Вместо этого, как указано в следующей формуле, объект изобретения основан не на всех отличительных особенностях одного раскрытого варианта воплощения изобретения. Таким образом, приведенная ниже формула включена в подробное описание настоящего документа, при этом каждый пункт формулы представляет собой отдельно заявленный объект изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ РАЗРЕШЕНИЯ ВЫЯВЛЕНИЯ ДИФРАКЦИОННОГО ЛЕПЕСТКА, АНТЕННАЯ СИСТЕМА И ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2697919C2 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Способ когерентного накопления пачки отраженных сигналов в сканирующей радиолокационной станции | 2022 |
|
RU2798025C1 |
| Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой | 2021 |
|
RU2760409C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2023 |
|
RU2806651C1 |
| Способ формирования и обработки импульсных радиолокационных сигналов с линейной частотной модуляцией | 2023 |
|
RU2806652C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2126164C1 |
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |
Изобретение относится к радиолокации. Техническим результатом является эффективное обнаружение затенения антенны транспортного средства. Заявленная система транспортного средства включает в себя антенну с подложкой и несколькими антенными элементами и устройство обработки, выполненное с возможностью измерять апертурную функцию в апертуре антенны и определять, затенен ли по крайней мере один из антенных элементов, на основании, по крайней мере отчасти, значения измеренной апертурной функции. 3 н. и 17 з.п. ф-лы, 6 ил.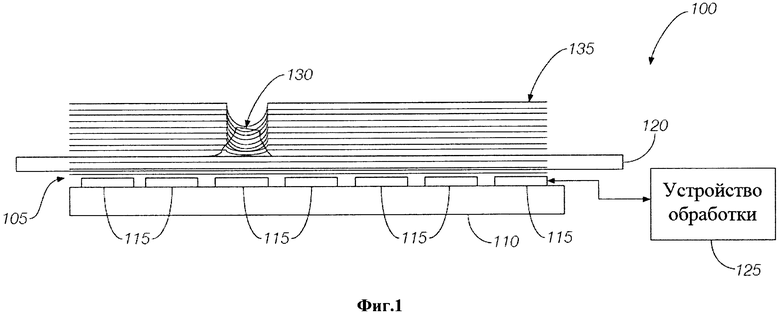
1. Система транспортного средства для обнаружения затенения антенны, которая включает в себя:
антенну, имеющую подложку и множество антенных элементов, размещенных на подложке, и
устройство обработки, запрограммированное измерять апертурную функцию в апертуре антенны, причем апертурная функция включает в себя данные о скорости, данные об угловом смещении и данные о дальности, скомпонованные в кубе данных, и определять, затенен ли по меньшей мере один из антенных элементов, по меньшей мере частично на основании измеренной апертурной функции по меньшей мере частично на основании способа преобразования Фурье для данных в упомянутом кубе данных.
2. Система по п. 1, в которой устройство обработки запрограммировано определять, что по меньшей мере один антенный элемент затенен, если диаграмма направленности излучения, полученная из измеренной апертурной функции, искажена.
3. Система по п. 1, в которой устройство обработки запрограммировано получать диаграмму направленности излучения из измеренной апертурной функции, причем диаграмма направленности излучения имеет боковые лепестки.
4. Система по п. 3, в которой устройство обработки запрограммировано определять, затенен ли по меньшей мере один антенный элемент, на основании уровней боковых лепестков на полученной диаграмме направленности излучения.
5. Система по п. 1, в которой апертурная функция основана по меньшей мере частично на набеге фазы и значении амплитуды в апертуре антенны.
6. Система по п. 5, в которой устройство обработки запрограммировано определять, затенен ли по меньшей мере один антенный элемент, по меньшей мере частично на основании набега фазы и значения амплитуды.
7. Система по п. 1, в которой устройство обработки запрограммировано получать диаграмму направленности излучения из измеренной апертурной функции, причем диаграмма направленности излучения имеет боковые лепестки, и при этом устройство обработки дополнительно запрограммировано прогнозировать ожидаемые уровни боковых лепестков.
8. Система по п. 7, в которой устройство обработки запрограммировано определять, затенен ли по меньшей мере один антенный элемент, посредством сравнения боковых лепестков диаграммы направленности излучения с ожидаемыми уровнями боковых лепестков.
9. Система по п. 1, в которой антенна выполнена с возможностью генерировать и принимать радиочастотный сигнал.
10. Способ обнаружения затенения антенны транспортного средства, содержащий этапы, на которых:
измеряют апертурную функцию в апертуре антенны, причем апертурная функция включает в себя данные о скорости, данные об угловом смещении и данные о дальности, скомпонованные в кубе данных, и
определяют, затенен ли по меньшей мере один антенный элемент, по меньшей мере частично на основании измеренной апертурной функции по меньшей мере частично на основании способа преобразования Фурье для данных в упомянутом кубе данных.
11. Способ по п. 10, в котором определение того, затенен ли по меньшей мере один антенный элемент, содержит этап, на котором определяют, является ли один или более из измеренных набегов фазы нелинейным и/или одно или более значений измеренных амплитуд отклоняющимся от ожидаемого значения.
12. Способ по п. 10, в котором определение того, затенен ли по меньшей мере один антенный элемент, содержит этапы, на которых получают диаграмму направленности излучения из апертурной функции, прогнозируют уровень бокового лепестка в полученной диаграмме направленности излучения и сравнивают спрогнозированный уровень бокового лепестка с фактическим уровнем бокового лепестка.
13. Способ по п. 12, в котором определяют, затенен ли по меньшей мере один антенный элемент, по меньшей мере частично на основании спрогнозированного уровня бокового лепестка.
14. Способ по п. 10, в котором определяют, затенен ли по меньшей мере один антенный элемент, по меньшей мере частично на основании набега фазы и/или значении амплитуды, определенных из апертурной функции.
15. Способ по п. 10, в котором апертурная функция основана на радиочастотном сигнале, принятом антенной.
16. Система транспортного средства для обнаружения затенения антенны, которая включает в себя:
антенну, имеющую подложку и множество антенных элементов, размещенных на подложке, и
устройство обработки, запрограммированное измерять апертурную функцию, причем апертурная функция включает в себя данные о скорости, данные об угловом смещении и данные о дальности, скомпонованные в кубе данных, при этом устройство обработки запрограммировано получать набег фазы и значение амплитуды из апертурной функции, прогнозировать уровни боковых лепестков из по меньшей мере одного из набега фазы и значения амплитуды и определять, затенен ли по меньшей мере один антенный элемент, по меньшей мере частично на основании способа преобразования Фурье для данных в упомянутом кубе данных, если спрогнозированные уровни боковых лепестков отличаются от фактических уровней боковых лепестков.
17. Система по п. 16, в которой устройство обработки запрограммировано определять, что по меньшей мере один антенный элемент затенен, если по меньшей мере одно из набега фазы является нелинейным и значение амплитуды отклоняется от ожидаемого значения.
18. Система по п. 16, в которой устройство обработки запрограммировано получать диаграмму направленности излучения из измеренной апертурной функции, причем диаграмма направленности излучения имеет боковые лепестки.
19. Система по п. 16, в которой устройство обработки запрограммировано сравнивать фактические уровни боковых лепестков со спрогнозированными уровнями боковых лепестков.
20. Система по п. 16, в которой антенна выполнена с возможностью генерировать и принимать радиочастотный сигнал.
| US 5959570 A, 28.09.1999 | |||
| US 2008154524 A1, 26.06.2008 | |||
| US 2002163463 A1, 07.11.2002 | |||
| US 2013249732 A1, 26.09.2013 | |||
| WO 2009078356 A1, 25.06.2009 | |||
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ С РАСШИРЕННОЙ ЗОНОЙ ОБНАРУЖЕНИЯ | 2003 |
|
RU2265865C2 |
| Конденсационное устройство для паровых машин | 1926 |
|
SU8402A1 |

