Изобретение относится к способу когерентного накопления и многоканальной доплеровской фильтрации пачки отраженных сигналов в первичных когерентно-импульсных радиолокационных станциях (РЛС) со сканирующими антеннами.
Многоканальная доплеровская фильтрация широко используется в импульсных радиолокационных станциях (РЛС) с излучением когерентных импульсных сигналов для решения задачи обнаружения движущихся объектов на фоне пассивных помех [1 – 9, 11].
Целью применения предлагаемого способа обработки радиолокационных сигналов является выделение радиолокационных сигналов, отраженных от движущихся объектов, если их спектры с учетом доплеровского смещения частоты не маскированы спектром пассивной помехи.
Последовательность зондирующих импульсов (ЗИ), излученных РЛС в соседних периодах зондирования, или импульсов радиолокационного сигнала, принятых приемником РЛС в результате отражения ЗИ от объекта в зоне обзора, принято называть пачкой [16].
Современный адаптивный подход к проблеме обнаружения когерентной пачки отраженных сигналов изложен в ряде известных работ, например, в [4: с.11, 11: с.46]. В указанных публикациях многоканальная доплеровская фильтрация выполняется устройством, реализующим быстрое преобразование Фурье (БПФ), перекрывающее весь диапазон скоростей отражающих объектов, свободный от пассивных помех. Выход каждого доплеровского канала связан с блоком адаптивных порогов, где выполняется сравнение амплитуд всех спектральных составляющих с порогами, величина которых определяется средним уровнем шумов и помех в соответствующем канале.
При превышении порога в каком-либо канале отражающий объект считается обнаруженным, а его скорость определяется номером этого канала [4], либо более точно путем совместного использования выходных сигналов соседних каналов. В результате применения адаптивных порогов обнаружения вероятность ложных тревог стабилизируется на заданном уровне и не зависит от мощности пассивных помех и шума на выходе фильтров [11].
Многочисленные модификации указанного способа изложены в монографиях, учебниках, статьях и патентах на изобретение. Например, один из способов многоканальной обработки описан в работах [1: с. 141, 2: с.207, 4], где перед многоканальной фильтрацией предлагается использовать режекторный фильтр, подавляющий пассивную помеху, порожденную отражениями от неподвижных местных предметов. Однако при использовании такого способа полностью исключается возможность обнаружения сигналов, имеющих доплеровское смещение частоты, близкое к нулю, и попадающих в полосу режекции, даже если их мощность выше уровня помехи, либо если пассивная помеха отсутствует. Кроме того, цель режекции, заключающаяся в уменьшении динамического диапазона при цифровой обработке, вряд ли достижима, т.к. требует выполнения режекции пассивных помех до аналого-цифрового преобразования, т.е. в аналоговом виде.
Для реализации N-канальной фильтрации пачки отраженных сигналов необходимо выполнить усиление входного сигнала приемника, его перенос на промежуточную частоту, аналого-цифровое преобразование, фильтрацию сигнала, согласованную с одиночным импульсом пачки, запоминание в запоминающем устройстве (ЗУ) М последних значений результатов согласованной фильтрации одиночного импульса в каждом элементе разрешения по дальности.
Известен способ многоканальной фильтрации пачки отраженных сигналов [6], заключающийся в излучении ЗИ и последующем приеме пачки сигналов, усилении принятых сигналов и их преобразовании в цифровой вид, согласованной фильтрации одиночного импульса пачки, запоминании результатов согласованной фильтрации для каждой дальности в запоминающем устройстве (ЗУ), фильтрации пачки запомненных в ЗУ данных на каждой дальности системой доплеровских фильтров в сочетании с оконной обработкой, обнаружении путем сравнения выходного сигнала фильтра с адаптивным порогом обнаружения, определенным по усредненной мощности помехи на выходе фильтра.
Необходимость оконной обработки перед фильтрацией пачки сигналов обычно не принимается во внимание[1, 2], либо указывается на ее использование лишь с целью снижения уровня боковых лепестков в частотной области. Но при этом неизменно утверждается, что оконная (весовая) обработка пачки перед доплеровской фильтрацией приводит к энергетическим потерям, т.е. к снижению дальности действия РЛС [6, 9, 11]. Однако взвешивание импульсов в пачке однозначно приводит к появлению энергетических потерь лишь в случае, когда огибающая пачки принимаемых сигналов прямоугольная. Прямоугольная пачка сигналов типична для РЛС с неподвижной антенной в виде пассивной или активной фазированной антенной решетки, выполняющей электронное сканирование. Для РЛС с такой антенной характерен обзор пространства путем скачкообразного изменения положения главного луча диаграммы направленности антенны, излучения и приема пачки импульсов при неизменном положении антенны и последующего перемещения луча в новое направление.
Для РЛС с механическим перемещением антенны и сканированием пространства пачка принимаемых импульсов обычно не получается прямоугольной, а повторяет форму диаграммы направленности антенны РЛС. При перемещении главного луча диаграммы направленности антенны РЛС в рабочем секторе углов отраженные от объекта и принятые приемником РЛС импульсы получают модуляцию по амплитуде и фазе по закону, пропорциональному квадрату диаграммы направленности антенны РЛС  где
где  текущее положение главного максимума диаграммы направленности антенны,
текущее положение главного максимума диаграммы направленности антенны,  угловое положение отражающего объекта. В общем случае
угловое положение отражающего объекта. В общем случае  функция комплексная. При равномерном вращении антенны РЛС с угловой скоростью Ω угол
функция комплексная. При равномерном вращении антенны РЛС с угловой скоростью Ω угол  Таким образом, огибающая пачки становится функцией времени
Таким образом, огибающая пачки становится функцией времени 
Если антенна РЛС расположена вблизи поверхности земли, то на больших дальностях мешающие отражения от местных предметов в принятом сигнале отсутствуют [1: с.202, 12]. Поэтому прием и обработка пачки сигналов, отраженных от объектов на максимальных дальностях обнаружения РЛС, ведутся лишь на фоне белого шума. Для достижения максимальной дальности обработка должна быть оптимизирована под эти условия.
Известно, что для обнаружения сигнала на фоне белого шума оптимальным является фильтр, импульсная характеристика которого согласованна с сигналом [3]. Т.к. в данном случае сигналом является пачка импульсов с комплексной огибающей  импульсную характеристику фильтра, согласованного с пачкой, можно определить выражением
импульсную характеристику фильтра, согласованного с пачкой, можно определить выражением

где * - знак комплексного сопряжения, t0 – интервал времени, в конце которого огибающая (амплитуда) выходного сигнала согласованного фильтра достигает максимума, обычно t0 равен или больше длительности пачки сигнала [3, выражения (6…11)].
Следует отметить, что оптимизация свойств фильтра по отношению сигнал/шум на выходе с целью повышения достоверности обнаружения на больших дальностях, где помехи от местных предметов отсутствуют, не противоречит использованию набора фильтров, рассчитанных на разные доплеровские сдвиги частоты, для решения задач селекции подвижных отражающих объектов [1, 2, 4, 11].
Для антенны с размером апертуры Х по координате х диаграмма направленности в плоскости сканирования может быть определена выражением [14: c. 200, выражение (6-3)]

где  распределение напряженности электрического поля в плоскости сканирования; λ - длина волны; ϕ - угловое отклонение направления относительно электрической оси ДН антенны.
распределение напряженности электрического поля в плоскости сканирования; λ - длина волны; ϕ - угловое отклонение направления относительно электрической оси ДН антенны.
Так как сканирование в радиолокации применяется для обнаружения и измерения угловых координат отражающих объектов в плоскости сканирования, ширина диаграммы направленности в этой плоскости с целью достижения необходимой точности оценки угловых координат обычно не превышает единиц градусов. В этом случае выражение (2) можно представить в виде

которое подтверждает известный факт приближенной связи диаграммы направленности антенны и поля в ее апертуре через преобразование Фурье [13].
С учетом выражения (3) комплексно сопряженная диаграмма направленности имеет вид

Импульсную характеристику согласованного фильтра определим по выражению (1) с использованием выражения (4)

Будем считать  что не ограничивает общности результатов, а лишь приводит к смещению оценки угловой координаты объекта, которое всегда можно учесть.
что не ограничивает общности результатов, а лишь приводит к смещению оценки угловой координаты объекта, которое всегда можно учесть.
Частотную характеристику фильтра, согласованного с пачкой сигнала, определим как прямое преобразование Фурье от его импульсной характеристики (5)
Меняя порядок интегрирования и учитывая, что
 получим
получим

где  дельта-функция Дирака.
дельта-функция Дирака.
Из выражения (6) следует, что частотная характеристика фильтра, согласованного с пачкой отраженных импульсов, однозначно определяется распределением поля в апертуре антенны, длиной волны, скоростью вращения антенны и равна свертке комплексно-сопряженного распределения напряженности электрического поля самого с собой. Теоретически, в силу конечности размеров апертуры Х, такой фильтр имеет конечную по частоте полосу пропускания, за пределами которой его частотная характеристика равна нулю. Однако, на практике это вряд ли достижимо, т.к. предполагает бесконечную по времени длительность импульсной характеристики фильтра.
Выражение (6) получено в предположении, что доплеровское смещение частоты отраженного сигнала отсутствует. При неизвестной частоте Доплера для обнаружения пачки потребуется создание набора (гребенки) фильтров с частотными характеристиками

где  центральная частота полосы пропускания фильтра с номером i.
центральная частота полосы пропускания фильтра с номером i.
Известны результаты поиска частотных характеристик фильтров для системы защиты от пассивных помех, например, [11: с. 90]. Недостатком изложенного в [11] подхода является оптимизация частотных характеристик фильтров лишь по критерию минимизации уровня боковых лепестков их частотных характеристик с целью минимизации уровня помех от неподвижных местных предметов. При этом свойства сканирующей антенны РЛС никак не учитываются. Цель максимально возможного увеличения достоверности обнаружения на больших дальностях не достигается.
В ряде источников утверждается, что применение оконных функций при обработке пачки приводит к расширению полосы пропускания фильтров и к увеличению потерь [6, 9]. Однако, как показано выше, оконная обработка вида (5) является оптимальной, максимизирует отношение сигнал/шум на выходе фильтров и, следовательно, не имеет потерь, являясь также наилучшей с точки зрения частотной характеристики фильтров вида (6) и (7).
При реализации в РЛС частотных характеристик фильтров в соответствии с выражениями (6) и (7) требуется определить необходимое количество фильтров N в гребенке, количество М хранящихся в ЗУ результатов согласованной фильтрации одиночных импульсов для каждого элемента разрешения по дальности и набор значений центральных частот  их полос пропускания. В простейшем случае эту задачу решают, приравнивая М к N, и выполняя многоканальную фильтрацию путем умножения последних N отсчетов на оконную функцию и последующее N-точечное БПФ [1, 2, 4].
их полос пропускания. В простейшем случае эту задачу решают, приравнивая М к N, и выполняя многоканальную фильтрацию путем умножения последних N отсчетов на оконную функцию и последующее N-точечное БПФ [1, 2, 4].
В [11] БПФ упоминается, как один из возможных вариантов реализации гребенки фильтров при N≥ 16.
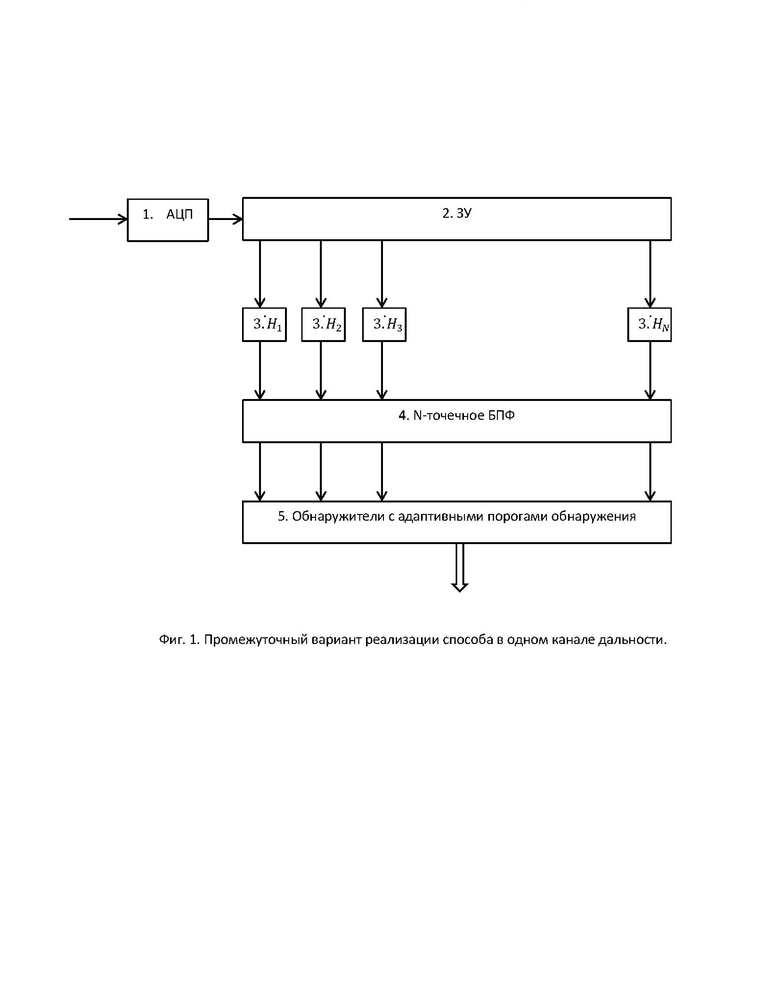
Структурная схема способа обработки для одного элемента разрешения по дальности при использовании БПФ представлена на фиг. 1. В общем случае в прототипе говорится лишь о том, что импульсные характеристики фильтров выбираются из условия минимизации боковых лепестков в частотной области. Поэтому техническое решение, представленное на фиг. 1 является вариантом реализации прототипа. Если при этом дискретные значения импульсной характеристики фильтра  определяются выражением (5), т.е. каждый фильтр есть согласованный с принимаемой пачкой импульсов фильтр для разных значений доплеровского сдвига частоты, то техническое решение, изображенное на фиг. 1, является также и промежуточным вариантом реализации предлагаемого способа.
определяются выражением (5), т.е. каждый фильтр есть согласованный с принимаемой пачкой импульсов фильтр для разных значений доплеровского сдвига частоты, то техническое решение, изображенное на фиг. 1, является также и промежуточным вариантом реализации предлагаемого способа.
Несомненным достоинством БПФ является экономия вычислительных ресурсов. Однако использование БПФ имеет и ряд недостатков. Основные недостатки использования БПФ для обработки пачки радиолокационных сигналов:
– количество N доплеровских фильтров обязательно должно совпадать с М, но может оказаться больше их необходимого числа;
– несмотря на то, что для БПФ амплитудно-частотные характеристики фильтров с ненулевой центральной частотой  при
при  обращаются в ноль, уровень пассивных помех от неподвижных местных предметов на их выходах может оказаться высоким из-за ненулевой ширины их спектра и высокого уровня боковых лепестков частотных характеристик фильтров.
обращаются в ноль, уровень пассивных помех от неподвижных местных предметов на их выходах может оказаться высоким из-за ненулевой ширины их спектра и высокого уровня боковых лепестков частотных характеристик фильтров.
Прототипом (ближайшим аналогом) изобретения является способ, изложенный в [4: с.11].
Указанный способ заключается в излучении и последующем приеме пачки сигналов, усилении принятых сигналов и их преобразовании в цифровой вид, согласованной фильтрации одиночного импульса пачки, запоминании результатов согласованной фильтрации для каждой дальности в запоминающем устройстве, фильтрации пачки запомненных данных на каждой дальности системой доплеровских фильтров в сочетании с оконной обработкой, обнаружении путем сравнения выходного сигнала фильтра с адаптивным порогом обнаружения, определенным по усредненной мощности помехи на выходе фильтра.
Способ-прототип обеспечивает когерентное накопление пачки отраженных сигналов в РЛС со сканирующей антенной, однако в указанном способе не учитывается возможность адаптивной расстановки частотных характеристик фильтров в диапазоне однозначных доплеровских частот, что в свою очередь не позволяет повысить вероятностные характеристики обнаружения объектов и минимизировать мощность пассивных помех. Кроме этого, в способе-прототипе предлагается предварительная режекция пассивных помех от неподвижных местных предметов, о недостатках которой говорилось выше. Цель предлагаемого в способе-прототипе взвешивания пачки – лишь снижение уровня боковых лепестков частотных характеристик фильтров.
При разработке изобретения решалась техническая проблема, заключающаяся в разработке способа накопления пачки отраженных сигналов в сканирующей РЛС, позволяющего повысить вероятностные характеристики обнаружения объектов и минимизировать мощность пассивных помех.
Технический результат: повышение вероятностных характеристик обнаружения объектов и минимизация мощности пассивных помех.
Для достижения технического результата в способе когерентного накопления пачки отраженных сигналов в сканирующей радиолокационной станции, заключающемся в излучении и последующем приеме пачки сигналов, усилении принятых сигналов и их преобразовании в цифровой вид, согласованной фильтрации одиночного импульса пачки, запоминании результатов согласованной фильтрации для каждой дальности в запоминающем устройстве, фильтрации пачки запомненных данных на каждой дальности системой доплеровских фильтров в сочетании с оконной обработкой, обнаружении путем сравнения выходного сигнала фильтра с адаптивным порогом обнаружения, определенным по усредненной мощности помехи на выходе фильтра, согласно изобретению частотные характеристики доплеровских фильтров определяют как свертку самого с собой комплексного распределения поля в апертуре антенны в плоскости сканирования.
Также для достижения технического результата количество фильтров определяют, исходя из диапазона однозначных значений доплеровского сдвига частоты и допустимому уровню пересечения нормированных амплитудно-частотных характеристик соседних фильтров, а допустимый уровень пересечения определяют по зависимостям вероятности правильного обнаружения от отношения сигнал/шум, исходя их заданной вероятности правильного обнаружения и допустимого снижения вероятности правильного обнаружения в одном фильтре.
Также для достижения технического результата окончательный выбор значений центральных частот доплеровских фильтров производят, размещая нули их амплитудно-частотных характеристик на нулевой частоте путем сдвига частотных характеристик фильтров в сторону уменьшения абсолютной величины их центральной частоты в пределах одного бокового лепестка.
Также для достижения технического результата при необходимости выполняют децимацию выходных сигналов гребенки доплеровских фильтров, не приводящую к возрастанию ошибок измерения угловых координат отражающих объектов.
Использование доплеровских фильтров с частотными характеристиками, совпадающими со спектром принятых РЛС пачек сигналов, который в свою очередь является сверткой самого с собой комплексного распределения поля в апертуре антенны в плоскости сканирования, обеспечивает максимально возможное отношение сигнал/шум на выходе фильтров. Это гарантирует максимально достижимое значение вероятности правильного обнаружения при фиксированном значении вероятности ложных тревог.
Уровень пересечения частотных характеристик соседних по частоте фильтров выбирается так, чтобы вероятность обнаружения ВС хотя бы в одном из двух соседних фильтров была не ниже заданной.
Частотные характеристики доплеровских фильтров корректируются путем сдвига по частоте так, чтобы один из минимумов частотной характеристики фильтра был расположен на нулевой доплеровской частоте, около которой сосредоточен спектр отражений от неподвижных местных предметов. Такое взаимное расположение частотных характеристик фильтров обеспечивает минимизацию уровня пассивных помех на выходах всех доплеровских фильтров кроме нулевого, в котором сосредоточены пассивные помехи от неподвижных местных предметов. Обязательным условием коррекции является то, что она не должна приводить к снижению значений, на которых пересекаются частотные характеристики соседних доплеровских фильтров.
Сущность изобретения поясняется фигурами, где:
Фиг. 1 Промежуточный вариант реализации способа в одном канале дальности
Фиг. 2. Коррекция частотных характеристик доплеровских фильтров с целью минимизации сигналов, отраженных от неподвижных местных предметов, на их выходе.
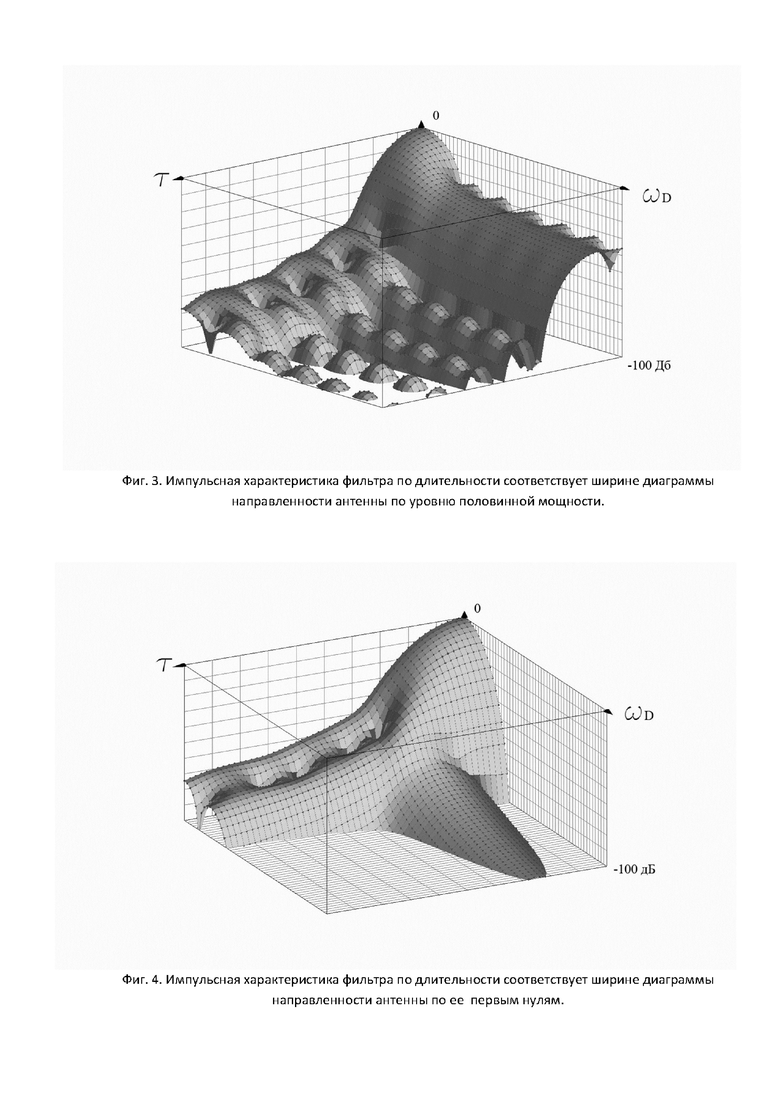
Фиг. 3 Импульсная характеристика фильтра по длительности соответствует ширине диаграммы направленности антенны по уровню половинной мощности
Фиг. 4 Импульсная характеристика фильтра по длительности соответствует ширине диаграммы направленности антенны по ее первым нулям.
Фиг. 5 Структурная схема реализации способа в одном канале дальности
На фигурах обозначены следующие элементы:
1-АЦП – аналого-цифровой преобразователь.
2-ЗУ – запоминающее устройство.
3-Н1, Н2, Н3…НN – импульсные характеристики доплеровских фильтров прототипа.
4- N-точечное БПФ – N-точечное быстрое преобразование Фурье.
5- Обнаружители с адаптивными порогами обнаружения
6- Дискретное преобразование Фурье, М фильтров
7- НСФ1, НСФ2, НСФ3…НСФM – импульсные характеристики доплеровских фильтров по предлагаемому способу, определенные с учетом квадрата диаграммы направленности антенны РЛС в плоскости сканирования (выражение (5)).
Изобретение осуществляется следующим образом.
При использовании способа когерентного накопления пачки отраженных сигналов в сканирующей РЛС происходит излучение и последующий прием пачки сигналов, усиление принятых сигналов и их преобразование в цифровой вид, согласованная фильтрация одиночного импульса пачки, запоминание результатов согласованной фильтрации для каждой дальности в запоминающем устройстве, фильтрация пачки запомненных данных на каждой дальности системой доплеровских фильтров в сочетании с оконной обработкой, обнаружение путем сравнения выходного сигнала фильтра с адаптивным порогом обнаружения, определенным по усредненной мощности помехи на выходе фильтра. Частотные характеристики доплеровских фильтров определяют как свертку самого с собой комплексного распределения поля в апертуре антенны в плоскости сканирования. Количество фильтров определяют, исходя из диапазона однозначных значений доплеровского сдвига частоты и допустимому уровню пересечения нормированных амплитудно-частотных характеристик соседних фильтров, а допустимый уровень пересечения определяют по зависимостям вероятности правильного обнаружения от отношения сигнал/шум, исходя их заданной вероятности правильного обнаружения и допустимого снижения вероятности правильного обнаружения в одном фильтре. Окончательный выбор значений центральных частот доплеровских фильтров производят, размещая нули их амплитудно-частотных характеристик на нулевой частоте путем сдвига частотных характеристик фильтров в сторону уменьшения абсолютной величины их центральной частоты в пределах одного бокового лепестка. При необходимости выполняют децимацию выходных сигналов гребенки доплеровских фильтров, не приводящую к возрастанию ошибок измерения угловых координат отражающих объектов.
С целью выравнивания характеристик обнаружения в центре полос пропускания доплеровских фильтров и на стыке частотных характеристик соседних фильтров и с целью снижения уровня пассивных помех на выходах фильтров с ненулевой центральной частотой в настоящем изобретении предлагается выбирать расстановку по частоте между центральными частотами соседних фильтров  исходя и следующих требований:
исходя и следующих требований:
1. Вероятность обнаружения пачки сигналов с частотой Доплера  на частоте пересечения амплитудно-частотных характеристик соседних фильтров должна быть не меньше вероятности обнаружения пачки на частоте, совпадающей с центральной частотой одного из фильтров в условиях равенства энергии пачек. Если в требованиях на РЛС задана вероятность правильного обнаружения объектов D с определенной эффективной площадью рассеяния (ЭПР) на максимальной дальности действия, то в первую очередь данное требование должно быть выполнено на центральных частотах любого из фильтров
на частоте пересечения амплитудно-частотных характеристик соседних фильтров должна быть не меньше вероятности обнаружения пачки на частоте, совпадающей с центральной частотой одного из фильтров в условиях равенства энергии пачек. Если в требованиях на РЛС задана вероятность правильного обнаружения объектов D с определенной эффективной площадью рассеяния (ЭПР) на максимальной дальности действия, то в первую очередь данное требование должно быть выполнено на центральных частотах любого из фильтров  Требование обнаружения объектов с заданной вероятностью D достигается выбором соответствующих величин пиковой мощности передатчика РЛС, длительности, периода повторения и количества одиночных импульсов в пачке, обрабатываемых когерентно. При смещении частоты Доплера пачки относительно центральной частоты вероятность ее обнаружения в фильтре будет снижаться. Но при этом возрастает вероятность обнаружения пачки в соседнем фильтре. Если частота Доплера соответствует точке пересечения частотных характеристик соседних фильтров, то вероятности обнаружения пачки в этих фильтрах будут одинаковыми. Если не учитывать потенциальную возможность обнаружения пачки в каком-то ином фильтре гребенки, вероятность обнаружения пачки в двух соседних фильтрах можно определить по выражению
Требование обнаружения объектов с заданной вероятностью D достигается выбором соответствующих величин пиковой мощности передатчика РЛС, длительности, периода повторения и количества одиночных импульсов в пачке, обрабатываемых когерентно. При смещении частоты Доплера пачки относительно центральной частоты вероятность ее обнаружения в фильтре будет снижаться. Но при этом возрастает вероятность обнаружения пачки в соседнем фильтре. Если частота Доплера соответствует точке пересечения частотных характеристик соседних фильтров, то вероятности обнаружения пачки в этих фильтрах будут одинаковыми. Если не учитывать потенциальную возможность обнаружения пачки в каком-то ином фильтре гребенки, вероятность обнаружения пачки в двух соседних фильтрах можно определить по выражению

где  вероятность обнаружения пачки на частоте в точке пересечения амплитудно-частотных характеристик (АЧХ) соседних фильтров хотя бы в одном из фильтров;
вероятность обнаружения пачки на частоте в точке пересечения амплитудно-частотных характеристик (АЧХ) соседних фильтров хотя бы в одном из фильтров;
 вероятность пропуска (необнаружения) пачки в этой же точке в обоих фильтрах одновременно.
вероятность пропуска (необнаружения) пачки в этой же точке в обоих фильтрах одновременно.
Выражение (8) справедливо при отсутствии статистической связи между обнаружениями пачки в соседних фильтрах, что характерно для малых отношений сигнал/шум, имеющих место на предельно больших дальностях действия РЛС.
Для того чтобы на частоте в точке пересечения АЧХ соседних фильтров вероятность правильного обнаружения отвечала заданным требованиям, необходимо обеспечить выполнение неравенства

С учетом выражений (8) и (9) для вероятности обнаружения пачки на частоте в точке пересечения АЧХ соседних фильтров получим

Например, при заданной D=0,9 в точке пересечения АЧХ соседних фильтров вероятности обнаружения РXв каждом из них должна быть не менее 0.684.
Учитывая зависимость вероятности обнаружения от отношения сигнал/шум Q, можно найти значения Q1 и Q2, при которых вероятности правильного обнаружения равны 0,9 и 0,684 соответственно. Выразив Q1 и Q2 в децибелах, находим разность Q1[дБ]-Q2[дБ], которая будет равна минимально допустимому уровню точки пересечения нормированных АЧХ соседних доплеровских фильтров. Например, для модели Сверлинга1 разность Q1[дБ]-Q2[дБ] составляет ~5,5 дБ, а для модели Сверлинга 3 получим ~3.5 дБ [17].
2. Хотя теоретически АЧХ доплеровских фильтров (7) не имеют боковых лепестков, на практике боковые лепестки появятся из-за ограничения по времени длительности импульсной характеристики фильтров. Поэтому для того, чтобы минимизировать мощность пассивных помех на выходе ненулевых фильтров, предлагается при необходимости уменьшить частотный сдвиг Δ между АХЧ фильтров таким образом, чтобы один из нулей реальных АЧХ фильтров с ненулевым номером располагался на нулевой частоте Доплера, в области которой сосредоточены отражения от неподвижных местных предметов. Такая коррекция центральных частот фильтров рекомендуется в пределах одного бокового лепестка, в который при определении центральных по допустимой глубине провала в точке пересечения АЧХ соседних фильтров попала нулевая частота Доплера (фиг. 2).
Как отмечалось выше, при реализации предлагаемого способа придется ограничивать длительность импульсной характеристики фильтров, что неизбежно приведет к появлению боковых лепестков в частотных характеристика и будет сопровождаться потерями потенциально достижимого отношении сигнал/шум. Для оценки уровня боковых лепестков и потерь проведены оценочные расчеты реакции фильтра с импульсной характеристикой вида (5), ограниченной по времени длительностью Т

Результаты расчетов проведены для случаев, когда длительность импульсной характеристики равна времени поворота антенны на углы, равные ширине диаграммы направленности по уровню половинной мощности и по ее первым нулям. Диаграмма направленности антенны аппроксимируется функцией вида sin(x)/x.В ходе расчетов использовано выражение, определяющее огибающую сигнала на выходе фильтра

где τ - смещение по времени относительно t0, ωД – отклонение по частоте Доплера.
В выражении (11) учтено, что диаграмма направленности антенны симметрична относительно максимума ее главного лепестка, и  считается равным нулю.
считается равным нулю.
Результаты расчетов по выражению (11) с учетом (10) представлены в таблице 1, а также на фиг. 3 и 4.
Таблица 1–Параметры выходного сигнала и фильтра обработки пачки импульсов радиолокационного сигнала
0,707 по диаграмме, по огибающей пачки 0,5
Из данных таблицы 1 видно, что когерентное накопление пачек, длительность которых ограничена уровнем главного лепестка диаграммы направленности 0,707 и ее первыми нулями, практически неотличимы по энергетическому потенциалу РЛС, но существенно отличаются по уровню боковых лепестков частотных характеристик доплеровских фильтров.
Еще одной отличительной особенностью предлагаемого способа следует считать возможность прореживания (децимации) выходных сигналов доплеровских фильтров с целью экономии вычислительных ресурсов устройств цифровой обработки. Децимация заключается в получении результатов доплеровской фильтрации не в каждом периоде излучения и приема одиночного зондирующего сигнала РЛС, а после К циклов их излучения и приема. Величину К в первую очередь следует выбирать, исходя их необходимости обеспечения заданной точности измерения угловых координат отражающих объектов. Опыт показывает, что на практике К должно быть таким, чтобы за время разворота антенны на угол, равный ширине диаграммы направленности по уровню половинной мощности, необходимо получить не менее 3-4 результатов многоканальной доплеровской фильтрации.
Таким образом, основными отличительными особенностями настоящего изобретения от прототипа являются следующие:
1. Однозначное определение частотной характеристики согласованного с пачкой сигналов фильтра при когерентном накоплении пачки с учетом распределения напряженности электрического поля в апертуре сканирующей антенны.
2. Использование необходимого количества фильтров с требуемым расположением их центральных частот, которые определяются диапазоном однозначной оценки доплеровского сдвига частоты, формой АЧХ фильтров, соответствующих распределению поля в апертуре антенны и допустимому уровню пересечения АЧХ соседних фильтров, зависящему от заданной вероятности правильного обнаружения.
3. Уточнение количества фильтров (при необходимости, в сторону увеличения) с целью снижения уровня пассивных помех в фильтрах с ненулевыми номерами.
4. Использование при когерентном накоплении пачки рекомендуемой оконной функции в виде квадрата диаграммы направленности антенны длительностью не менее времени поворота антенны на угол, соответствующий ширине диаграммы направленности по первым нулям.
5. Отказ от предварительной режекции пассивных помех, обусловленных отражениями от земной поверхности и неподвижных местных предметов.
6. Децимация выходных сигналов гребенки доплеровских фильтров с целью экономии вычислительных ресурсов цифровых устройств обработки (при необходимости).
Реализация предлагаемого способа когерентного накопления пачки отраженных сигналов в сканирующей РЛС обеспечивает:
1. Максимально возможное повышение энергетического потенциала РЛС за счет согласованной фильтрации пачки отраженных сигналов;
2. Минимально необходимое число доплеровских фильтров.
3. Предельно низкий уровень боковых лепестков частотных характеристик фильтров.
Эффективность предложенного способа когерентного накопления пачки отраженных сигналов в сканирующей РЛС подтверждена при его использовании в аппаратуре первичной обработки информации первичного канала (ПК) аэродромного радиолокационного комплекса (АРЛК) «Миасс», разработанного в АО «ЧРЗ «Полет».
Использование способа когерентного накопления пачки отраженных сигналов сканирующей РЛС в аппаратуре первичной обработки информации ПК АРЛК «Миасс» позволило повысить энергетический потенциал (соответственно дальность действия и точностные параметры), а также устойчивость к воздействию пассивных помехах на частотах эхо-сигналов ПК АРЛК «Миасс».
Список использованных источников
1. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. – М.: Радио и связь, – 1986. – 288 с ., ил.
2. Бакулев П.А. Радиолокационные системы. Учебник для вузов. Изд. 3-е, перераб. и доп. – М.: Радиотехника, 2015. – 440 с., ил.
3. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для ВУЗов. – М.: Советское радио, – 1970. – 560 с.
4. А.В. Бруханский. Системы селекции движущихся целей.Учебное пособие. – М.: МАИ, .[Электронный ресурс]. – Режим доступа: http://kaf401.rloc.ru/files/MTI.pdf, свободный – (1990).
5. Пат. 2593146. Российская Федерация, МКП G01S 7/36. Способ адаптивного обнаружения сигналов движущихся целей на фоне многокомпонентных пассивных помех/В.Г. Бертенев; заявитель и патентообладатель В.Г. Бертенев. - № 2015128480/07, 14.07.2015; опубл. 27.07.2016. Бюл. № 21.
6. Пат. 2594005. Российская Федерация, МКП G01S 13/04. Способ обработки радиолокационного сигнала в импульсно-доплеровской РЛС/И.В. Колбаско; заявитель и патентообладатель И.В. Колбаско. - № 2015137347/07, 01.09.2015; опубл. 10.08.2016. Бюл. № 22.
7. Пат. 2439609. Российская Федерация, МКП G01S 13/526. Многоканальное корреляционно-фильтровое приемное устройство с селекцией движущихся целей/В.Г. Бертенев; заявитель и патентообладатель ОАО "ГСКБ "Алмаз-Антей". - № 2010104368/07, 08.02.2010; опубл. 10.01.2012. Бюл. № 1.
8. Пат. 2293347. Российская Федерация, МКП G01S 7/292. Способ когерентного накопления радиоимпульсов /Горячев В.С. , Козлов В.Н., Смирнов В.А., Филатов Ю.А.; заявитель и патентообладатель Государственное унитарное предприятие "Конструкторское бюро информатики, гидроакустики и связи "Волна". - № 2003129302/09, 03.10.2003; опубл. 10.02.2007. Бюл. № 4.
9. Принципы фильтрации пачки отраженных импульсов. [Электронный ресурс]. – Режим доступа: https://helpiks.org/6-41830.html, свободный – (2016).
10. Кострова Т.Г. Методы и устройства устранения неоднозначных измерений дальности в импульсных радиотехнических системах. Канд. дисс. – Владимир: Владимирский гос. Университет, 2007. – 184 с.: ил.
11. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. Под общей ред. В.С. Вербы. В 2 книгах. Книга 1. Москва: Техносфера, –2014. –672 с., ил.
12. Леховицкий Д.И., Рябуха В.П., Жуга Г.А.СДЦ в импульсных РЛС. – Харьков: Прикладная радиоэлектроника, т.10, 2011, №4. С. 463-478.
13. Андре Анго. Математика для электро - и радиоинженеров. (С предисловием Луи де Бройля). - М.: Издательство "Наука", 1967. - 780 с.
14. Марков Г.Т., Сазонов Д.М. Антенны. Учебник для студентов радиотехнических специальностей вузов. Изд. 2-е, перераб. и доп. – М.: «Энергия», –1975. – 528 с.
15. Левин Б.Р. Теоретические основы статистической радиотехники. – 3 изд., перераб. и доп. –М.: Радио и связь, – 1989. – 656 с. – ил.
16. Вайнштейн Л.А., Зубаков В.Д. Выделение сигналов на фоне случайных помех. –М.: Советское радио, – 1960. – 449 с.
17. Минаков Е.И., Валихин Г.А. Вероятность радиолокационного обнаружения флуктуирующих целей. – Тула: Известия Тульского государственного университета. Технические науки, 2016, № 12, ч.2. С. 159 – 163.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой | 2021 |
|
RU2760409C1 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| Многоканальное устройство обработки фазоманипулированных радиолокационных сигналов | 2022 |
|
RU2792418C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |


Изобретение относится к способу когерентного накопления и многоканальной доплеровской фильтрации пачки отраженных сигналов в первичных когерентно-импульсных радиолокационных станциях (РЛС) со сканирующими антеннами. Техническим результатом является повышение вероятностных характеристик обнаружения объектов и минимизация мощности пассивных помех. Заявленный способ заключается в излучении и последующем приеме пачки сигналов, усилении принятых сигналов и их преобразовании в цифровой вид, согласованной фильтрации одиночного импульса пачки, запоминании результатов согласованной фильтрации для каждой дальности в запоминающем устройстве, фильтрации пачки запомненных данных на каждой дальности системой доплеровских фильтров в сочетании с оконной обработкой, обнаружении путем сравнения выходного сигнала фильтра с адаптивным порогом обнаружения, определенным по усредненной мощности помехи на выходе фильтра. При этом частотные характеристики доплеровских фильтров определяют как свертку самого с собой комплексного распределения поля в апертуре антенны в плоскости сканирования. 1 з.п. ф-лы, 5 ил., 1 табл.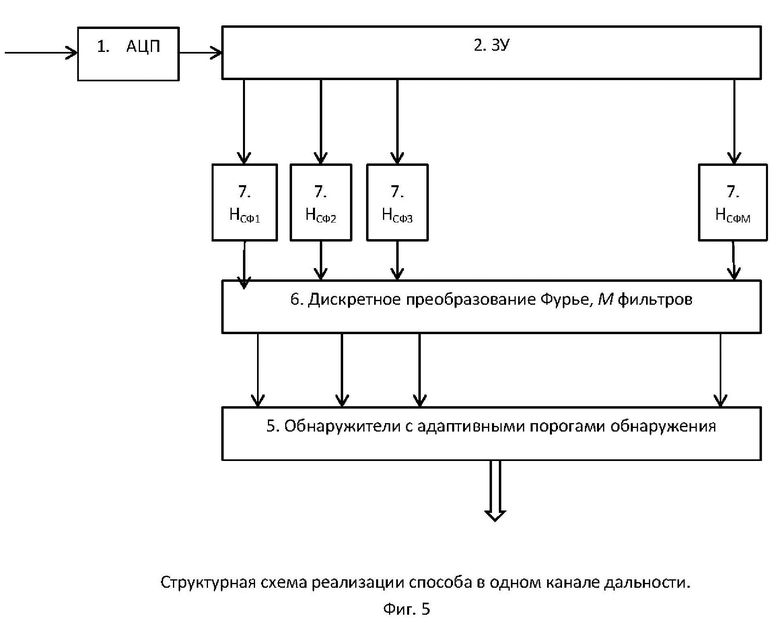
1. Способ когерентного накопления пачки отраженных сигналов в сканирующей радиолокационной станции, заключающийся в излучении и последующем приеме пачки сигналов, усилении принятых сигналов и их преобразовании в цифровой вид, согласованной фильтрации одиночного импульса пачки, запоминании результатов согласованной фильтрации для каждой дальности в запоминающем устройстве, фильтрации пачки запомненных данных на каждой дальности системой доплеровских фильтров в сочетании с оконной обработкой, обнаружении путем сравнения выходного сигнала фильтра с адаптивным порогом обнаружения, определенным по усредненной мощности помехи на выходе фильтра, отличающийся тем, что частотные характеристики доплеровских фильтров определяют как свертку самого с собой комплексного распределения поля в апертуре антенны в плоскости сканирования, количество фильтров определяют, исходя из диапазона однозначных значений доплеровского сдвига частоты и допустимого уровня пересечения нормированных амплитудно-частотных характеристик соседних фильтров, а допустимый уровень пересечения определяют по зависимостям вероятности правильного обнаружения от отношения сигнал/шум, исходя из заданной вероятности правильного обнаружения и допустимого снижения вероятности правильного обнаружения в одном фильтре, при этом окончательный выбор значений центральных частот доплеровских фильтров производят, размещая нули их амплитудно-частотных характеристик на нулевой частоте путем сдвига частотных характеристик фильтров в сторону уменьшения абсолютной величины их центральной частоты в пределах одного бокового лепестка.
2. Способ по п.1, отличающийся тем, что при необходимости выполняют децимацию выходных сигналов гребенки доплеровских фильтров, не приводящую к возрастанию ошибок измерения угловых координат отражающих объектов.
| БРУХАНСКИЙ А.В | |||
| Системы селекции движущихся целей | |||
| Учебное пособие | |||
| - М.: МАИ, 1990, 15 с | |||
| Нефтяная топка для комнатных печей | 1922 |
|
SU401A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| КОБЕРНИЧЕНКО В.Г | |||
| Расчет и проектирование цифровых фильтров | |||
| - Екатеринбург: Издательство Уральского университета, 2013, 64 с., сс.14-16, 44-47 | |||
| RU | |||
