Область техники
Настоящее изобретение относится к области летательных аппаратов (ЛА), может служить альтернативой вертолетному парку, имеет диапазон применения от детской игрушки, беспилотных подъемных устройств до магистральных ЛА.
Уровень техники
Известна конструкция ЛА, представленного в патенте RU2617014 (опубликован 19.04.2017 г.), содержащий корпус, выполненный в виде дискообразного тела вращения, и движители, соединенные с корпусом, при этом в качестве движителей используется кольцевое вентиляторное колесо, создающее главную подъемную силу, и воздушно-реактивный двигатель (ВРД) противоположного вращения, причем кольцевое вентиляторное колесо (ВК) имеет управляемые лопатки-лопасти, при этом летательный аппарат также содержит первый лопаточный аппарат, направляющий воздушный поток на лопатки-лопасти ВК, и второй лопаточный аппарат, обеспечивающий выпрямление воздушного потока, отбрасываемого ВК, причем корпус имеет возможность размещения кабины пилотов, системы управления, системы посадки и привода вентиляторного колеса, воздушно-реактивный двигатель выполнен с возможностью обеспечения двух функций, включающих генерирование электроэнергии для привода вентиляторного колеса, систем управления и потребителей электроэнергии, установленных на борту летательного аппарата, а также выполнен с возможностью обеспечения дополнительной подъемной тяги на стартовом режиме или режиме висения при помощи поворотного сопла с обеспечением тяги на маршевом режиме.
В указанном патенте RU2617014 указано, что два движителя, один из которых выполнен в виде кольцевого вентиляторного колеса с лопастями-лопатками, а другой - в виде воздушно-реактивного двигателя малой тяги и вращающегося в противоположную сторону, обеспечивают подъем ЛА, режим висения, маршевый режим и маневрирование ЛА.
Перечисленные режимы возможно обеспечить иными конструктивными средствами с обеспечением широкого маневрирования, уменьшения габаритов, повышения скоростных характеристик и потолка, также большей грузоподъемности.
Настоящее изобретение является дальнейшим развитием ЛА, представленного в указанном патенте.
Заявляемое изобретение может служить пилотным нового класса ЛА с условным названием «зан» (ZAN), где в отличие от класса «вертолеты» вместо несущего винта (НВ) вертолета используется закрытое многолопастное кольцевое вентиляторное колесо (КВК) с приводом вращательного движения на радиальной периферии и поэтому отсутствует центральный вал, приводящий во вращение НВ. Учитывая современный уровень техники, при котором предстоят длительные исследования управляемости криволинейных лопастей-лопаток вентиляторных колес, в настоящем изобретении рассматривается в качестве движителя вентиляторное колесо с управляемыми прямыми лопастями.
Раскрытие изобретения
Целью настоящего изобретения является создание летательного аппарата, в котором тяга и возможность широкого маневрирования обеспечиваются кольцевой обоймой (КО), расположенной вокруг корпуса и состоящей из двух движителей в виде кольцевых вентиляторных колес.
Указанная цель (технический результат) достигается тем, что летательный аппарат содержит корпус, выполненный в виде чечевицеобразного тела вращения, при этом часть корпуса которого имеет вид шарообразного слоя, по боковой поверхности которого для передачи тяги и для маневрирования ЛА обкатывается движительная КО. При этом между поверхностью выпуклого шарового слоя и вогнутой поверхность КО выполнен зазор, чтобы указанные элементы конструкции не касались друг друга.
Кроме того, движители защищены обтекателем обоймы и направляющим и спрямляющим аппаратами, что исключает возможность повреждения вентиляторных колес с лопастями при соприкосновении ЛА с деревьями, домами, линиями электропередач и т.п. Также при возникновении аварийных ситуаций для летного персонала ЛА появилась возможность безопасной эвакуации вверх или вниз (по оси Z), катапультирования или установки парашютных систем. Настоящее изобретение подразумевает различные варианты для пилотируемого и для беспилотного применения летательных аппаратов.
Под шаровым слоем в контексте настоящего изобретения понимается часть шара, ограниченная двумя параллельными плоскостями, пересекающими шар (https://ru.wikipedia.org/wiki/%D0%A8%D0%B0%D1%80%D0%BE%D0%B2%D0%BE%D0%B9_%D1%81%D0%BB%D0%BE%D0%B9, просмотрено 20.09.2017 г.).
Чечевицеобразная форма корпуса ЛА обеспечивает хорошую обтекаемость набегающим потоком воздуха при полете. Выпуклая часть чечевицеобразной формы ЛА приходится на кабину пилота, благодаря чему обеспечивается хорошая видимость при полете.
Кольцевая обойма (КО) используется в качестве движителя, расположенного вокруг корпуса ЛА, при этом она состоит из двух кольцевых вентиляторных колес (КВК), расположенных один под другим и вращающихся в противоположные стороны с помощью приводных систем, причем бортовой компьютерной системой обеспечивается равенство импульса моментов силы первого и второго КВК, а сами КВК имеют управляемые лопасти, при этом необходимый режим обеспечивается на входе воздушного потока в первое КВК неподвижным направляющим аппаратом, на выходе из первого КВК - промежуточным направляющим аппаратом, подготавливающим воздушный поток к входу во второе КВК, а после него - неподвижным спрямляющим аппаратом, обеспечивающим выпрямление воздушного потока, выходящего из корпуса обоймы. Таким образом, создается тяга, подобная созданию тяги несущих винтов вертолета соосной схемы.
Управление вектором тяги осуществляется обкаткой КО вокруг шарового слоя корпуса ЛА силовым воздействием через 4 вертикальные щели (2 по оси X и 2 по оси Y) в его боковой поверхности.
Краткое описание чертежей
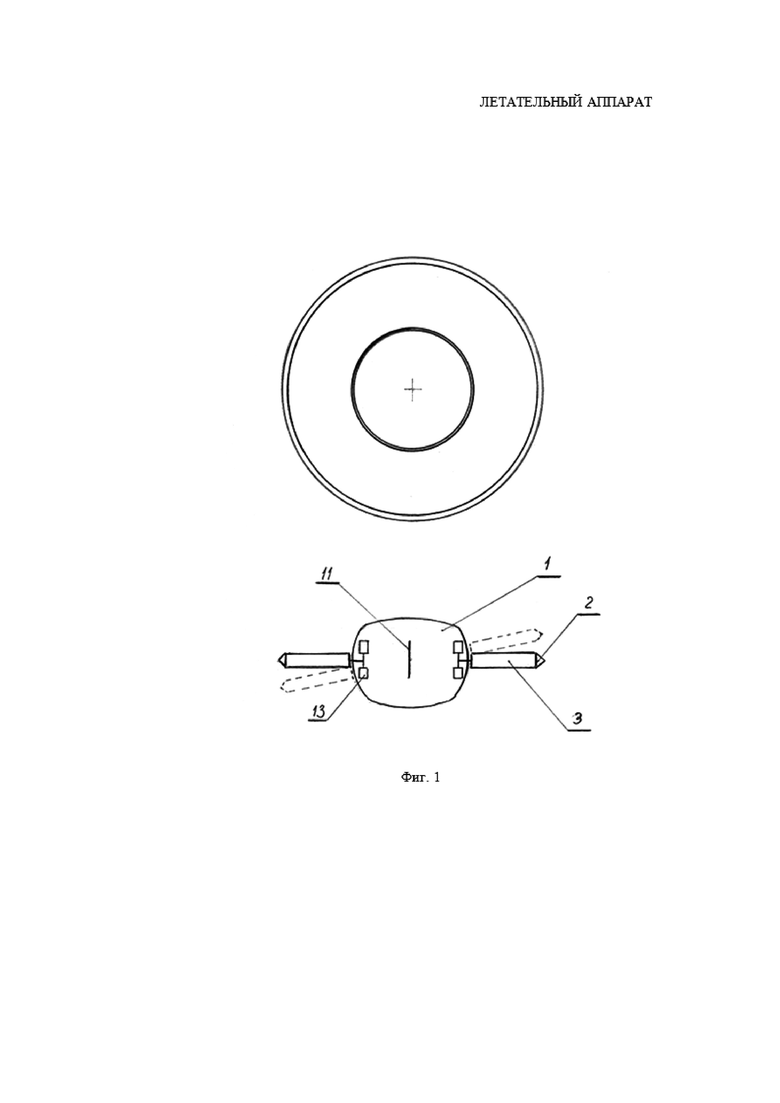
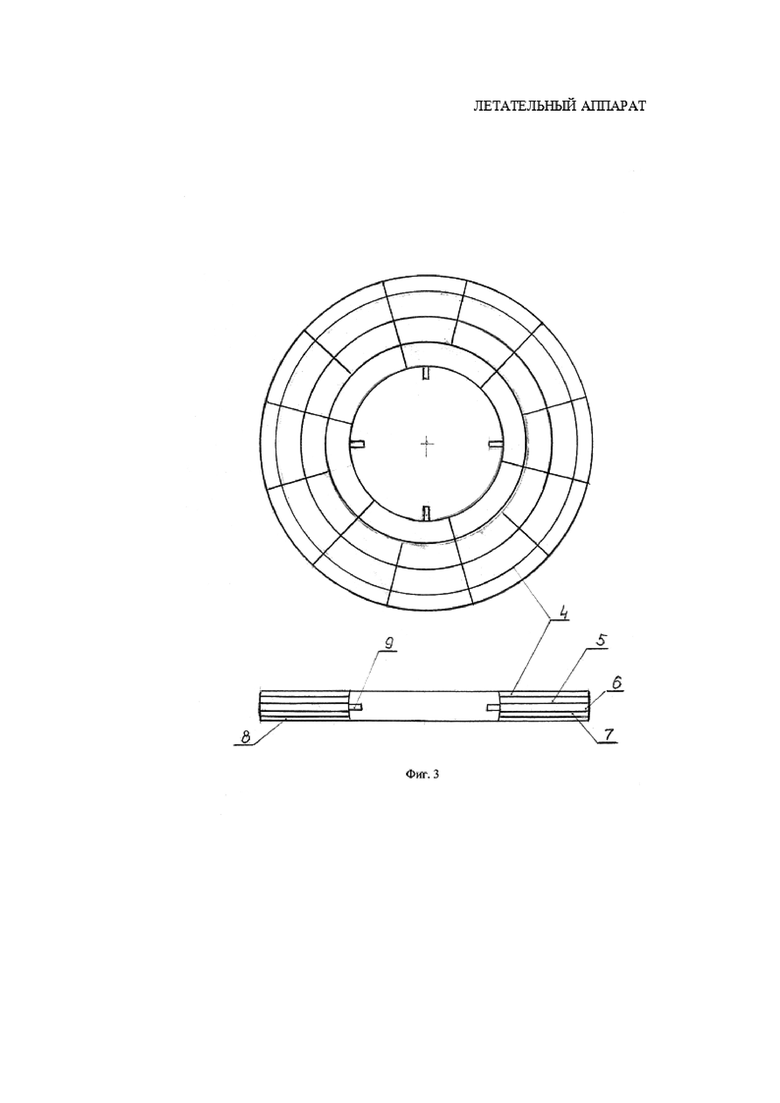
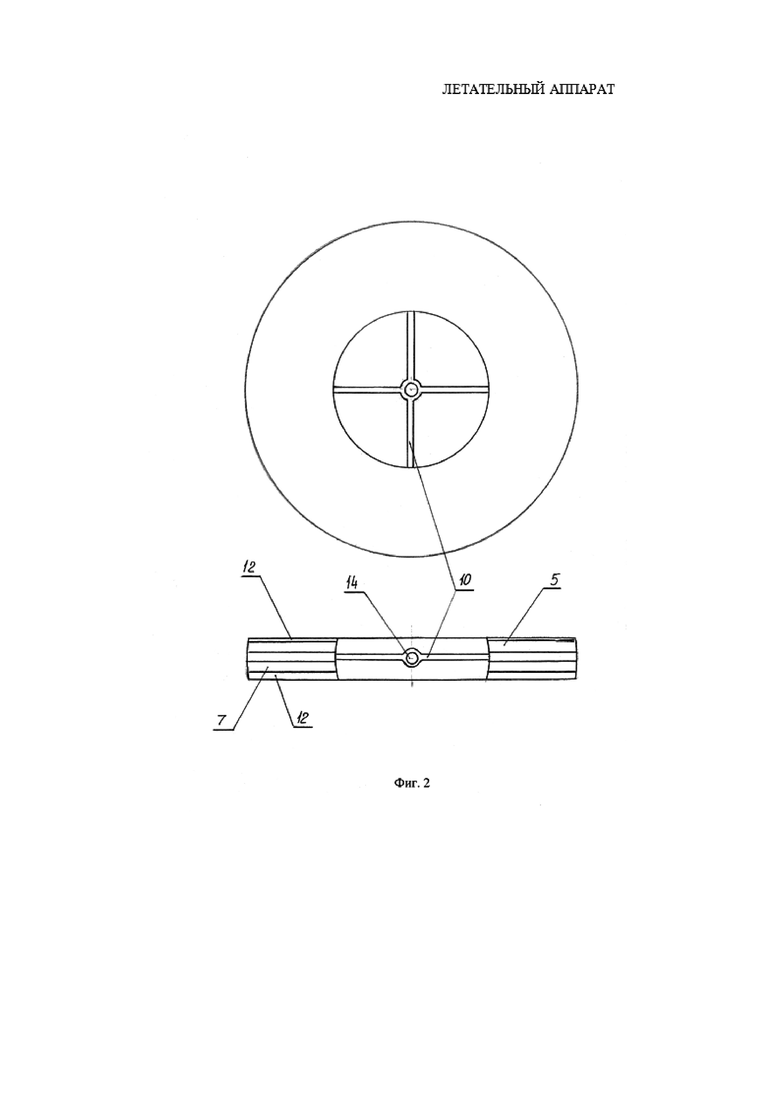
На фиг. 1 показан общий вид летательного аппарата, на фиг. 2 показана кольцевая обойма малоразмерного ЛА, на фиг. 3 показана кольцевая обойма большеразмерного ЛА.
Осуществление изобретения
Предлагаемый ЛА имеет облик «летающей тарелки» и напоминает астрономический факт расположения колец планеты Сатурн, при этом в ЛА имеется возможность наклонения плоскости колец относительно субъекта. Вокруг чечевицеобразного корпуса 1 ЛА располагается кольцевая обойма КО 2 (подробнее фиг. 2 и фиг. 3), в которой находятся 2 кольцевых вентиляторных колеса 5 и 7 , вращающихся в противоположные стороны (соосная схема) и представляющих из себя каждое внутренний и внешний ободы с расположенными между ними управляемыми лопастями, которые приводятся во вращение с помощью приводных систем механическим (шестеренчатым), электромагнитным, газодинамическим или иным другим способами. Эти КВК разделены неподвижным промежуточным направляющим воздушный поток аппаратом 6, в полостях которого могут размещаться приводные системы. Перед первым КВК 5 расположен неподвижный направляющий аппарат решетчатого или сотового типа 4, формирующий воздушный поток на его входе, а после второго КВК 7 располагается неподвижный спрямляющий аппарат также решетчатого или сотового типа 8, организующий воздушный поток на его выходе. В случае незначительных нагрузок и малых форм ЛА (детская игрушка, БПЛА или одно-двухместные заны) или малой эффективности возможна замена направляющего 4 и спрямляющего 8 аппаратов на перфорированные кожухи 12, препятствующие попаданию опасных предметов на лопасти с сохранением функций силового каркаса кольцевой обоймы или замена на оградительные и силовые элементы.
Маневрирование и маршевый полет осуществляется наклонением плоскости КО 2 по отношению к плоскости шарового слоя ЛА, причем маршевый полет происходит при отрицательном угле тангажа. Наклон КО 2 осуществляется в случае малых форм ЛА (фиг. 2) управлением крестовиной 10, прикрепленной к КО через 4 вертикальные щели в боковых стенках шарового слоя ЛА (одна из них указана под номером 11 на фиг. 1) при помощи гидроцилиндров 13 или пневмоцилиндров, или электромагнитных тяг по оси Х и по оси Y или других силовых механизмов, воздействующих на радиусе между щелью и центром шарового слоя и КО 2 и перемещающих вверх или вниз (по оси Z летательного аппарата), причем в центре крестовины 10 находится шаровой шарнир 14, вокруг которого происходит ее качение, а следовательно и плоскости КО 2. В этом случае достаточно по одному месту приложения усилий на оси Х и оси Y в направлении оси Z. В случае большеразмерных занов (фиг. 3), во избежание загромождения фюзеляжа конструкцией крестовины, управление осуществляется через 4 радиальных полых хвостовика 9, прикрепленных к КО 2 4-мя гидроцилиндрами 13 или пневмоцилиндрами, или электромагнитными тягами, причем их работа должна быть синхронизирована бортовыми компьютерами так, чтобы при манипуляции КО 2 (а следовательно при маневрировании ЛА), ее центр обязательно совпадал с центром шарового слоя ЛА. Через полости хвостовиков осуществляется подвод электрических или силовых (например, гибкий вал) коммуникаций к приводным системам КО 2.
Манипулирование КО 2 вызывает маневрирование ЛА, отчего положение пилота и экипажа может отличаться от направления вектора тяги ЛА, поэтому совмещение направлений обеспечивается управляемым бортовым компьютером рассогласованием скоростей вращения КВК 5, 7 при помощи управляемых лопастей или приводной системой того или другого КВК.
Конструкция корпуса ЛА для увеличения грузоподъемности допускает возможность присоединения еще одного чечевицеобразного модуля с размещением в нем топливных баков, пассажирских кресел, боевого или грузового оборудования, выдвижных стоек шасси и т.п. Облик летательного аппарата в этом случае будет выглядеть как сплюснутая цифра «8» с кольцевой обоймой на верхней половине. Размещение в модуле дополнительного маршевого двигателя позволит получить высокие скорости дозвукового полета.
Заявленное изобретение отличается также увеличенными скоростными характеристиками, повышенной грузоподъемностью, уменьшением вертикальных габаритов, повышением безопасности летательного аппарата.
Настоящее изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с несущими винтами. Летательный аппарат содержит корпус, кольцевое вентиляторное колесо с приводом вращательного движения. При этом корпус выполнен чечевицеобразным, часть корпуса представляет собой шарообразную поверхность. Вокруг корпуса в качестве движителя расположена кольцевая обойма, состоящая из двух кольцевых вентиляторных колес, расположенных одно под другим и вращающихся в противоположные стороны. Кольцевая обойма выполнена с возможностью изменения ее плоскости по отношению к плоскости корпуса летательного аппарата путем обкатывания вокруг шаровой поверхности корпуса летательного аппарата. Обеспечивается повышение скорости грузоподъемности, уменьшение вертикальных габаритов. 1 з.п. ф-лы, 3 ил.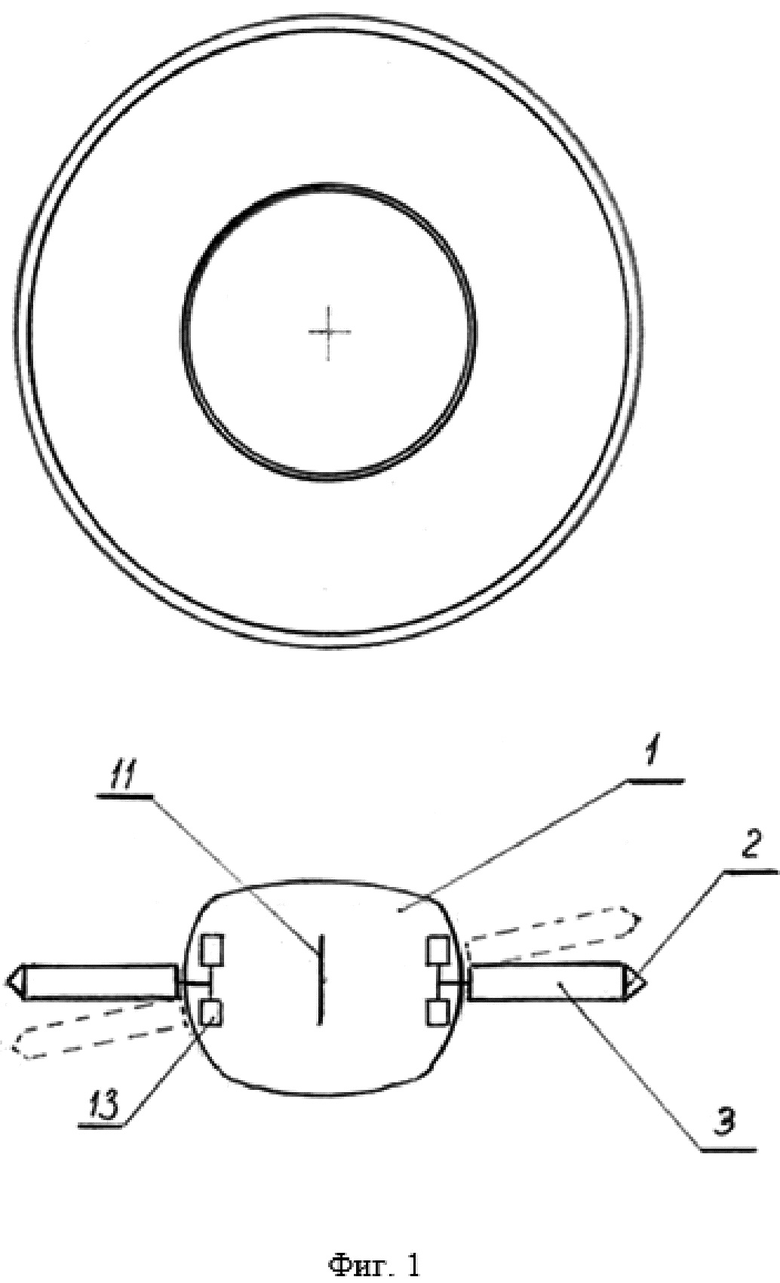
1. Летательный аппарат, содержащий корпус и использующий в качестве движителя кольцевое вентиляторное колесо с приводом вращательного движения, отличающийся тем, что корпус выполнен чечевицеобразным, часть корпуса представляет собой шарообразный слой, вокруг корпуса в качестве движителя расположена кольцевая обойма, состоящая из двух кольцевых вентиляторных колес, расположенных одно под другим и вращающихся в противоположные стороны, при этом кольцевая обойма выполнена с возможностью изменения ее плоскости по отношению к плоскости корпуса летательного аппарата путем обкатывания кольцевой обоймы вокруг шарового слоя корпуса летательного аппарата, а в шаровом слое корпуса летательного аппарата выполнены вертикальные щели, через которые производится воздействие на положение плоскости кольцевой обоймы.
2. Летательный аппарат по п. 1, отличающийся тем, что к кольцевой обойме присоединяется крестовина или хвостовики, на которые воздействуют механизмы управления, в результате чего происходит изменение плоскости кольцевой обоймы по отношению к плоскости летательного аппарата.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2617014C1 |
| СТРАТЕГИЧЕСКИЙ ВЕРТОЛЕТ | 2007 |
|
RU2336199C1 |
| WO 2017125923 A1, 27.07.2017 | |||
| US 8464978 B2, 18.06.2013 | |||
| Способ бокового затылования, прорезания спиральных канавок и заточки глобоидных червячных фрез на зубофрезерном станке | 1949 |
|
SU82674A1 |

