Изобретение относится к авиационной технике, в частности к винтокрылым летательным аппаратам с двумя и более винтами, и может быть использовано при создании высокоманевренных мультикоптеров.
Известны винтокрылые летательные аппараты с несущими винтами, расположенными в кольцевых каналах. Например, вертолет Карла Бильвилера 1893-го года с одним несущим винтом в кольцевом канале (Савинский Ю.Э. Мир вертолета. Helicopter universe. М.: Изд-во Триумф, 2014. - 510 с.), беспилотный носитель вентиляторного типа Air 400Х - CARRIE (электронный ресурс: Modern russian unmanned vehicles, http://bastion-karpenko.narod.ru/DPLA_RF.html, дата обращения 04.01.2016 г.) с восемью движителями в кольцевых каналах. Известны так же летательные аппараты с двумя и более воздушными винтами, установленными в поворотных на угол 90° вдоль продольной оси аппарата кольцевых каналах, например самолет вертикального взлета и посадки Nord 500 Cadet (Ружицкий Е.И. Европейские самолеты вертикального взлета. М.: ACT, Астрель, 2000. - 130 с.), самолет вертикального взлета и посадки (пат. США 5419514, 1995).
В аналогах расположение винтовых движителей в профилированных кольцевых каналах увеличивает коэффициент полезного действия винтов, а устройство кольцевых каналов с возможностью поворота на угол 90° вдоль оси фюзеляжа в направлении движения расширяет функциональные возможности летательных аппаратов - позволяет осуществлять вертикальный взлет и посадку и осуществлять горизонтальный полет по самолетному типу с преимуществами в экономичности и скорости относительно летательных аппаратов вертолетного типа.
Важнейшим качеством летательного аппарата является маневренность - способность изменять параметры полета, в том числе пространственное положение фюзеляжа за определенный промежуток времени. Приведенные выше технические решения лишь частично незначительно повышают показатели маневренности (изменение во времени параметров направления полета, высоты, скорости) за счет повышения до 25-30% тяги винтов и никак не определяют такой показатель маневренности, как возможность изменять пространственную ориентацию фюзеляжа в режиме зависания, что является существенным недостатком, ограничивающим возможности существующих аналогов.
Наиболее близким к предлагаемому изобретению по совпадающим признакам является квадролет (пат. РФ 2547950, 2015), содержащий корпус, четыре средства тяги с несущими винтами, каждое из которых расположено на раме, установленной на соответствующей выносной балке корпуса, средства тяги установлены с возможностью как совместного, так и раздельного друг от друга поворота в рамах на угол не менее 180°, а рамы с возможностью как совместного, так и раздельного поворота вокруг оси балок на угол 360°, при этом винты установлены с возможностью как совместного, так и раздельного друг от друга изменения силы и направления тяги.
Недостатками прототипа являются:
- большое время, затрачиваемое на совершение маневров летательного аппарата, обусловленное необходимостью переориентации средств тяги относительно фюзеляжа для предотвращения возможности соприкосновения лопастей тяговых винтов с элементами конструкции летательного аппарата при его некоторых пространственных эволюциях;
- необходимость при вышеуказанном изменять направление тяги винтов изменением направления их вращения и (или) изменением шага их лопастей в том числе на отрицательный;
- указанные недостатки проявляются тем более, чем большее количество средств тяги содержит летательный аппарат.
Технический результат, на достижение которого направлено изобретение, заключается в повышении маневренности летательного аппарата путем уменьшения времени на совершение маневров при некоторых его эволюциях за счет исключения необходимости изменять пространственную ориентацию средств тяги относительно фюзеляжа для предотвращения соприкосновения винтов с элементами фюзеляжа и в упрощении его конструкции.
Технический результат достигается тем, что в летательном аппарате, содержащем средства тяги с несущими винтами, установленные в рамах, и фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа.
Сущность изобретения заключается в том, что средства тяги с несущими винтами заявляемого летательного аппарата размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа.
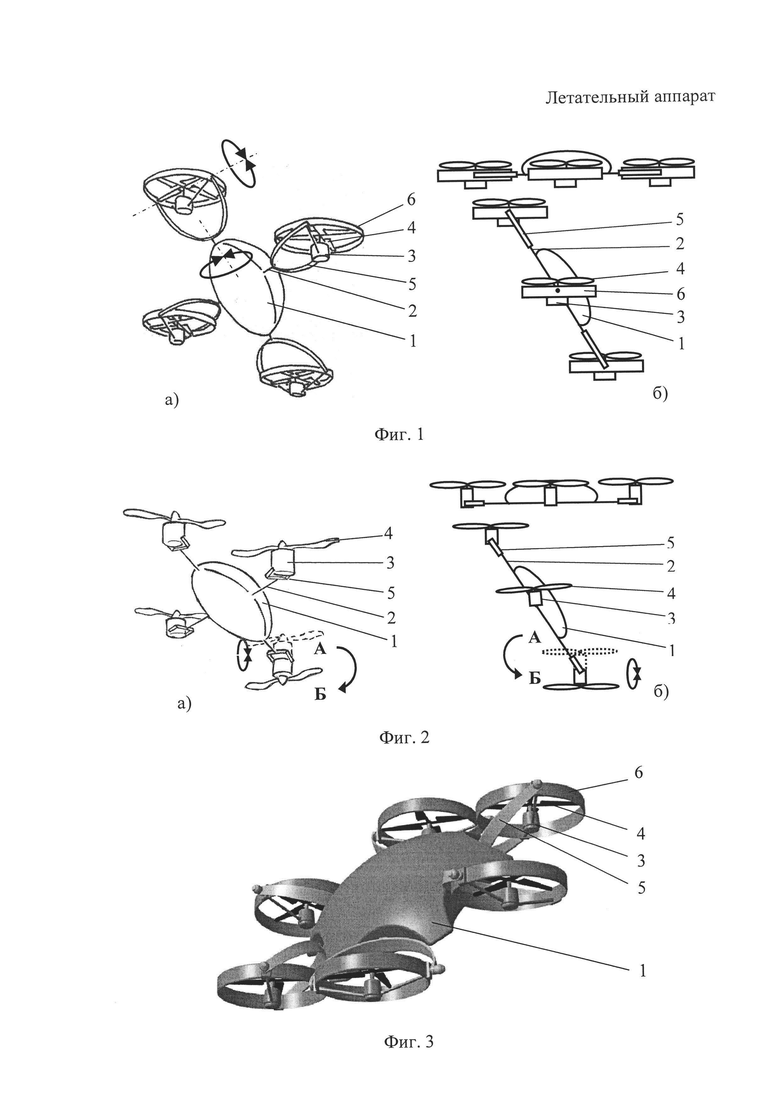
Изобретение поясняется иллюстрациями, где
на фиг. 1 а представлен чертеж общего вида предлагаемого летательного аппарата в варианте с четырьмя средствами тяги - квадрокоптера;
на фиг. 1б - схематично показана одна из пространственных ориентаций фюзеляжа летательного аппарата при совершении маневрирования;
на фиг 2а - чертеж общего вида прототипа;
на фиг.2б - схематично изображена пространственная ориентация фюзеляжа прототипа при совершении такого же маневра, как маневр заявляемого летательного аппарата, представленный на фиг. 1б;
на фиг. 3 - общий вид заявляемого летательного аппарата с шестью средствами тяги - гексокоптера.
На чертежах обозначено: фюзеляж летательного аппарата 1; выносные балки фюзеляжа 2; средства тяги 3, несущие винты 4; рамы 5; кольцевые каналы 6. На чертеже фиг. 1а стрелками обозначено направление поворота подвижных агрегатов заявляемого летательного аппарата - движителей 3 с несущими винтами 4 и рам 5. На чертеже фиг. 2а, 2б стрелками обозначено изменение ориентации средств тяги прототипа относительно фюзеляжа перемещением из положения «А» в положение «Б» и изменение шага лопастей винтов, в том числе на отрицательный.
Летательный аппарат содержит (фиг. 1а, 1б): средства тяги 3 с несущими винтами 4, которые установлены в рамах 5 на выносных балках 2 фюзеляжа 1. Рамы 5 установлены с возможностью поворота вокруг оси балок 2 на угол 360°. При этом средства тяги 3 с винтами 4 размещены в кольцевых каналах 6, установленных в рамах 5 с возможностью поворота в рамах вдоль оси балок 2 на угол 360°.
Летательный аппарат работает следующим образом.
Поворот относительно фюзеляжа 1 летательного аппарата плоскостей несущих винтов 4 обеспечивается поворотом кольцевых каналов 6 со средствами тяги 3 в рамах 5 на угол от 0° до 360° вдоль осей балок 2, рам 5 вокруг осей балок 2 фюзеляжа 1 так же на угол от 0° до 360°.
Это позволяет создать суммарную составляющую векторов тяги каждого средства тяги 3 с винтами 4, позволяющую совершать полет летательного аппарата и зависание при сохранении любой заданной пространственной ориентации фюзеляжа 1.
Размещение средств тяги 3 в кольцевых каналах 6, установленных в рамах 5 с возможностью поворота на угол 360° вдоль оси балок 2 предлагаемого летательного аппарата, приводит к следующему результату:
- исключается возможность соприкосновения лопастей винтов 4 с балками 2 при любых пространственных эволюциях фюзеляжа 1 (как это происходит в конструкции прототипа, представленной на чертежах фиг. 2а, 2б). Соответственно устраняется необходимость затрат времени на изменение при маневрировании летательного аппарата ориентации средств тяги 3 относительно фюзеляжа 1 на противоположенную, что сокращает затраты времени на совершение маневра летательного аппарата в целом;
- устраняется необходимость изменения направления тяги винтов 4 на противоположенное изменением направления их вращения и (или) изменением шага их лопастей на отрицательный, что существенно упрощает конструкцию средств тяги летательного аппарата;
- устраняется разбалансировка суммарной составляющей тяги при маневрировании летательного аппарата при переходе средства тяги из положения «А» в положение «Б» (как это происходит в прототипе, фиг. 2а, 2б), соответственно и необходимость компенсации разбалансировки изменением режима работы других средств тяги, что существенно упрощает систему управления средствами тяги.
Последние два обстоятельства особенно значимы при создании летательных аппаратов с большим числом средств тяги, например, как представлено на чертеже на фиг. 3 - гексокоптеров.
Поворот подвижных агрегатов летательного аппарата - кольцевых каналов 6 со средствами тяги 3, рам 5 и согласованное совместное или раздельное управление их положением осуществляется с помощью известных и применяемых конструкций поворотных узлов, известных приводов и известных командных систем управления (например, см. аналоги; электронный ресурс: Ружинский Е.И. Американские самолеты вертикального взлета, http://coolib.com/b/128556/read, дата обращение 04.01.2016 г.; Богданов Ю.С., Михеев Р.Л. Конструкция вертолетов. М.: Машиностроение, 1990; электронный ресурс http://xaribda.ru/node/68, дата обращения 06.01.2016 г.). То есть принципиальная возможность осуществления заявленного технического решения обеспечена общеизвестными техническими средствами.
Совокупность отличительных признаков предлагаемого летательного аппарата обеспечивает возможность за меньшее время в сравнении с прототипом изменять пространственное положение его фюзеляжа в неограниченном диапазоне вне зависимости от режима полета или висения.
Таким образом, использование предлагаемого технического решения обеспечивает повышение маневренности летательного аппарата и упрощение его конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| КВАДРОЛЕТ | 2013 |
|
RU2547950C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| Автожир | 2018 |
|
RU2673933C1 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| Винтокрылый беспилотный летательный аппарат тандемной схемы | 2021 |
|
RU2771195C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
Изобретение относится к авиационной технике, в частности к винтокрылым летательным аппаратам с двумя и более винтам. Летательный аппарат содержит средства тяги с несущими винтами и фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°. При этом средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа. Обеспечивается повышение маневренности и упрощение конструкции летательного аппарата. 3 ил.
Летательный аппарат, содержащий средства тяги с несущими винтами и фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, отличающийся тем, что средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа.
| КВАДРОЛЕТ | 2013 |
|
RU2547950C1 |
| US 20160159472 A1, 09.06.2016 | |||
| ФАЛЬЦАППАРАТ | 1994 |
|
RU2121439C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТИТАНАТОВ ЩЕЛОЧНЫХ МЕТАЛЛОВ | 0 |
|
SU157967A1 |

