Данный способ относится к области геодезического контроля в строительной отрасли.
Известен способ определения координат горизонтальной оси линейного инженерного объекта с помощью геодезических приборов СНиП 3.01.03-84 «Геодезические работы в строительстве», утвержден постановлением Минстроя РФ от 5 августа 1996 г. №18-60], взятый в качестве прототипа.
Сущность данного способа состоит в том, что на контролируемом участке линейного инженерного объекта проводят геодезические измерения, последовательно вынося проектную ось в натуру от исходных реперов с применением геодезических средств измерений.
Недостатком этого способа является невозможность повторения измерений, так как точки измерений не закрепляются, поэтому невозможно точно произвести повторные геодезические измерения на контролируемом участке. Кроме того, данный способ предполагает наличие человеческого фактора в процессе производства работ, что ведет к увеличению трудозатрат и снижению достоверности, а значит - точности измерений.
Решаемая техническая задача заключается в повышении эффективности и достоверности работ за счет повышения точности определения и восстановления координат горизонтальной оси линейного инженерного объекта с применением наземного лазерного сканера.
Поставленная задача достигается тем, что в способе определения и восстановления положения горизонтальной оси линейного инженерного объекта, при котором по реперам планово-высотного обоснования производят геодезические измерения, в результате чего определяют вышеупомянутую горизонтальную ось и каждый раз, после ее утраты, восстанавливают от этих же реперов, согласно изобретению на одном из реперов планово-высотного обоснования устанавливают наземный лазерный сканер (НЛС), создают дополнительную местную сеть планово-высотного обоснования, в которой в качестве реперов используют твердые (без изменения геометрической формы) элементы конструкций линейного инженерного объекта, выполняют сканирование всех конструкций линейного инженерного объекта при помощи наземного лазерного сканера (НЛС) с линейной дискретностью шага сканирования в пределах от 2 до 10 мм и средней квадратической погрешностью 2 мм, в результате чего определяют координаты X, Y, Z точек отражения лазерного луча от поверхности всех конструкций линейного инженерного объекта, передают результаты сканирования (скан) в ПЭВМ, с помощью компьютерной программы регистрируют в ней скан и получают цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта. Далее производят обработку данных результатов лазерного сканирования, определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих измерению посторонних объектов, производят их фильтрацию в автоматическом режиме, выполняют привязку скана к заданной системе координат. В этой же программе виртуально моделируют вышеупомянутую горизонтальную ось, автоматически аппроксимируя векторный объект «горизонтальная ось» в данные НЛС и находя точки его соприкосновения с полученными данными НЛС, определяют трехмерные координаты X, Y, Z полученной виртуальной горизонтальной оси, принадлежащей линейному инженерному объекту. Каждый раз, в случае утраты горизонтальной оси, восстанавливают ее из предыдущей модели путем вторичного сканирования всех конструкций линейного инженерного объекта и наложения на предыдущую цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта, используя в качестве реперов те же твердые элементы конструкций линейного инженерного объекта.
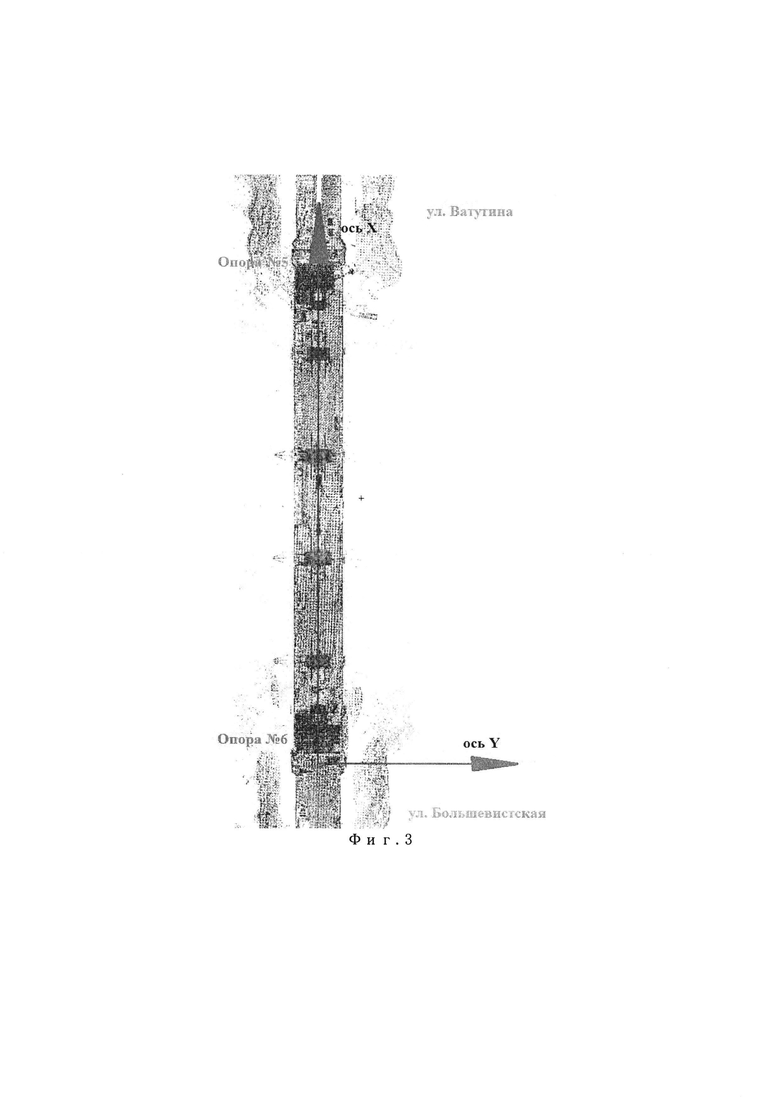
Работа предлагаемого способа представлена на примере производства геодезических работ при возведении арочного Байтового моста через р. Обь (г. Новосибирск). Способ поясняется чертежами. На Фиг. 1 представлена схема контролируемого участка линейного инженерного объекта и закрепления в качестве реперов твердых (без изменения геометрической формы) элементов конструкций линейного инженерного объекта. На Фиг. 2 представлена общая схема создания фактической цифровой точечной метрической трехмерной (3D) модели контролируемого участка линейного инженерного объекта. На Фиг. 3 представлена схема определения и восстановления горизонтальной оси линейного инженерного объекта.
Предлагаемый способ осуществляется следующим образом. На контролируемом участке линейного инженерного объекта устанавливают наземный лазерный сканер (НЛС) на одном из реперов планово-высотного обоснования, создают дополнительную местную сеть планово-высотного обоснования, в которой в качестве реперов используют твердые (без изменения геометрической формы) элементы конструкций линейного инженерного объекта (Фиг. 1), автоматически определяют координаты X, Y, Z точек отражения лазерного луча от поверхности всех конструкций линейного инженерного объекта собственной программой обработки данных, принадлежащей данному оборудованию, и в соответствии с эксплуатационной документацией на прибор (ЭД). Выполняют измерение расстояний при помощи встроенного лазерного дальномера, при этом для каждого измерения фиксируют вертикальные и горизонтальные углы, шаг сканирования (расстояние между смежными точками) должен быть в пределах от 2 до 10 мм, средняя квадратическая погрешность должна составлять 2 мм. Результатом работ является «облако точек» лазерных отражений или сканы поверхности всех конструкций линейного инженерного объекта. Далее передают результаты сканирования (сканы) в ПЭВМ, с помощью компьютерной программы регистрируют в ней сканы и получают фактическую цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта. Производят обработку данных результатов наземного лазерного сканирования с помощью программного обеспечения, позволяющего выполнить привязку сканов к заданной системе координат. Проводят фильтрацию сканов для удаления измерений, полученных при отражении от посторонних объектов (Фиг. 2). В этой же программе виртуально моделируют вышеупомянутую горизонтальную ось, автоматически аппроксимируя векторный объект «горизонтальная ось» в данные НЛС и находя точки его соприкосновения с полученными данными НЛС, определяют трехмерные координаты X, Y, Z полученной виртуальной горизонтальной оси, принадлежащей линейному инженерному объекту. Каждый раз, в случае утраты горизонтальной оси, восстанавливают ее из предыдущей модели путем вторичного сканирования всех конструкций линейного инженерного объекта и наложения на предыдущую цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта, используя в качестве реперов те же твердые элементы конструкций линейного инженерного объекта (Фиг. 3).
Геодезические измерения, выполненные методом наземного лазерного сканирования, позволяют определять положение горизонтальной строительной оси любых сложных конструкций, используя в качестве реперов любые твердые элементы конструкций линейного инженерного объекта.
Технический результат - предлагаемый инновационный способ, основанный на бесконтактном методе наземного лазерного сканирования, позволяет повысить в целом эффективность геодезических работ за счет повышения точности определения и восстановления положения горизонтальной оси любой сложности линейного инженерного объекта, а также повысить безопасность проводимых дистанционным методом измерительных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ В ФОРМАТЕ 3D С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2591173C1 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта | 2017 |
|
RU2668730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| Способ автоматизированных измерений и дистанционной передачи данных для геотехнического мониторинга объектов добычи газа | 2024 |
|
RU2836421C1 |

Изобретение относится к области геодезического контроля и может быть использовано для определения и восстановления положения горизонтальной оси любого сложного инженерного линейного объекта. В заявленном способе определения и восстановления положения горизонтальной оси линейного инженерного объекта по реперам планово-высотного обоснования производят геодезические измерения, в результате чего определяют вышеупомянутую горизонтальную ось и каждый раз, а после ее утраты, восстанавливают от этих же реперов. В данном способе на одном из реперов планово-высотного обоснования устанавливают наземный лазерный сканер (далее - НЛС), создают дополнительную местную сеть планово-высотного обоснования, в которой в качестве реперов используют твердые элементы конструкций линейного инженерного объекта, выполняют сканирование всех конструкций линейного инженерного объекта при помощи НЛС с линейной дискретностью шага сканирования в пределах от 2 до 10 мм и средней квадратической погрешностью 2 мм, в результате чего определяют координаты X, Y, Z точек отражения лазерного луча от поверхности всех конструкций линейного инженерного объекта, передают результаты сканирования (скан) в ПЭВМ, с помощью компьютерной программы регистрируют в ней скан и получают цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта. Далее производят обработку данных результатов лазерного сканирования, определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих измерению посторонних объектов, производят их фильтрацию, выполняют привязку скана к заданной системе координат. В этой же программе виртуально моделируют вышеупомянутую горизонтальную ось, автоматически аппроксимируя векторный объект «горизонтальная ось» в данные НЛС и находя точки его соприкосновения с полученными данными НЛС, определяют трехмерные координаты X, Y, Z полученной виртуальной горизонтальной оси, принадлежащей линейному инженерному объекту. Технический результат - повышение точности определения и восстановления положения горизонтальной оси линейного инженерного объекта с применением наземного лазерного сканера. 3 ил.
Способ определения и восстановления положения горизонтальной оси линейного инженерного объекта, при котором по реперам планово-высотного обоснования производят геодезические измерения, в результате чего определяют вышеупомянутую горизонтальную ось и каждый раз, после ее утраты, восстанавливают от этих же реперов, отличающийся тем, что на одном из реперов планово-высотного обоснования устанавливают наземный лазерный сканер (НЛС), создают дополнительную местную сеть планово-высотного обоснования, в которой в качестве реперов используют твердые (без изменения геометрической формы) элементы конструкций линейного инженерного объекта, выполняют сканирование всех конструкций линейного инженерного объекта при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 2 до 10 мм и средней квадратической погрешностью 2 мм, в результате чего определяют координаты X, Y, Z точек отражения лазерного луча от поверхности всех конструкций линейного инженерного объекта, передают результаты сканирования (сканы) в ПЭВМ, с помощью компьютерной программы регистрируют в ней сканы и получают цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта, производят обработку данных результатов лазерного сканирования, определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих измерению посторонних объектов, производят их фильтрацию в автоматическом режиме, выполняют привязку скана к заданной системе координат, в этой же программе виртуально моделируют вышеупомянутую горизонтальную ось, автоматически аппроксимируя векторный объект «горизонтальная ось» в данные НЛС и находя точки его соприкосновения с полученными данными НЛС, определяют трехмерные координаты X, Y, Z полученной виртуальной горизонтальной оси, принадлежащей линейному инженерному объекту, и каждый раз при утрате восстанавливают ее из предыдущей модели путем вторичного сканирования всех конструкций линейного объекта и наложения на предыдущую цифровую точечную метрическую трехмерную (3D) модель поверхности всех конструкций линейного инженерного объекта, используя в качестве реперов те же твердые элементы конструкций линейного инженерного объекта.
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2474787C1 |
| US 20050117215 A1, 02.06.2005. | |||

