Область техники
Изобретение относится к техническим средствам изучения и освоения морей и океанов, для проведения океанографических и геологических исследований, а именно, к автономному погружному оборудованию для мониторинга подводной инфраструктуры, картирования морских биоресурсов, а также их визуализации, для проведения инженерных изысканий под бурение и строительство на шельфе, и в конкретном варианте осуществления может быть использовано в составе подводно-аппаратного комплекса (ПАК) для картографирования объектов морского дна и их визуальной заверки.
Заявляемое техническое решение представляет собой комплекс, предназначенный для использования на глубине до 500 м, и в одном из вариантов реализации включает акустические и оптические средства, обеспечивающие функции поиска донных объектов, картирования дна, визуальной заверки в разных масштабах.
Уровень техники
Из уровня техники известны отдельные устройства, аппараты и комплексы для проведения морской геофизической, гидрографической или фототелевизионной съемки, в т.ч. морского дна, а именно: подводный фотосъемочный комплекс [RU 47975 S], буксируемое подводное устройство [RU 2148003 С1], комплекс для гидрографических и геофизических работ на акваториях [RU 28257 U1], глубоководный фототелевизионный комплекс [RU 64587 U1], технологический комплекс для исследования шельфа [RU 16406 U1], морской геоакустический комплекс [RU 38233 Ш].
Известные системы традиционно содержат бортовой модуль, размещаемый на судне, и забортный буксируемый аппаратный модуль, соединенный с бортовым модулем кабель-тросом. Структура таких устройств определяется спецификой морской съемки: геофизической, гидрографической или фототелевизионной. В частности, глубоководный фототелевизионный комплекс [RU 64587 U1] не позволяет проводить гидроакустические исследования дна океана, а технологический комплекс [RU 16406 U1] предназначен только для геоакустических измерений, в то время как для повышения качества съемки требуется одновременное совокупное использование акустического и оптических методов исследований при обеспечении технологической совместимости применяемого оборудования.
В частности, известный комплекс [RU 38233 U1] содержит размещенную на судне-носителе бортовую часть (БЧ), соединенную кабель-тросом с буксируемой забортной частью комплекса (ЗЧК), причем БЧ связана с судовым спуско-подъемным устройством, судовой аппаратурой спутниковой радионавигационной системы (СРНС) и судовой аппаратурой гидроакустической навигационной системы (ГНС) и включает блок управления работой ЗЧК, блок сбора данных измерений и блок обработки и регистрации информации. Однако забортная часть ЗЧК комплекса включает лишь геоакустическую аппаратуру (гидролокаторы бокового обзора, акустический профилограф и эхолот) и не позволяет уточнять информацию с помощью фототелевизионной съемки. Комплекс ограничивает потенциальные функциональные возможности проведения глубоководных исследований морского дна, которые могут быть получены при комплексном использовании акустической и фототелевизионной технологий съемки, и тем самым, препятствуют достижению возможной высокой производительности и эффективности исследований морского дна. Разрешение и детальность съемки только гидроакустическими средствами может, в ряде случаев, оказаться недостаточной для адекватной интерпретации результатов измерений.
Наиболее близким к заявляемому решению является технологический комплекс для морских геологоразведочных работ («Абиссаль-3»), характеризующийся наличием трех забортных модулей, расширяющих функциональные возможности геологоразведки путем одновременного совокупного использования гидроакустических и фототелевизионных средств съемки (RU 106965 U1). Комплекс содержит размещенную на судне-носителе бортовую часть (БЧ), соединенную кабель-тросом с буксируемой забортной частью комплекса (ЗЧК), причем БЧ связана с судовым спуско-подъемным устройством, судовой аппаратурой спутниковой радионавигационной системы (СРНС) и судовой аппаратурой гидроакустической навигационной системы (ГНС) и включает блок управления работой ЗЧК, блок сбора данных измерений и блок обработки и регистрации информации, при этом ЗЧК выполнена в виде многозвенной разветвленной модульной схемы и включает буксируемый судном-носителем на кабель-тросе модуль заглубителя (МЗ), а также соединенные с ним посредством кабель-тросов гидроакустический модуль (ГМ), снабженный блоком нейтральной плавучести, и фототелевизионный модуль (ФТМ), которые буксируются модулем заглубителя МЗ на разных удалениях от морского дна, при этом модуль заглубителя МЗ выполнен с возможностью стыковки с ФТМ в единый модуль на этапе вывода (приема) ФТМ за (на) борт судна-носителя и содержит блок питания ЗЧК, подводную лебедку с блоком управления положением ФТМ относительно дна при выполнении съемки и стыковки МЗ с ФТМ, блок подводной электроники (контроллер) для предварительной обработки данных ФТМ, эхолот-альтиметр, датчик давления, снабженные светильниками цифровые телекамеры и блок интерфейсов для интегрирования информационных потоков ГМ и ФТМ с последующей передачей данных на БЧ по каналу связи, выполненному в виде оптоволоконного грузонесущего кабель-троса. МЗ дополнительно может быть оснащен гидроакустической аппаратурой в составе гидролокаторов бокового обзора высокой и низкой частоты, акустического профилографа и маяком-ответчиком ГНС. Гидроакустический модуль ГМ снабжен блоком нейтральной плавучести, включает гидролокатор бокового обзора (ГБО) дальнего действия (ГБОН), ГБО высокого разрешения (ГБОВ), акустический профилограф (АП), эхолот (ЭЛ), маяк-ответчик (МО) ГНС, синтезатор зондирующих сигналов (СЗС), интерфейс сигналов управления, датчики пространственного положения ГМ, блок цифровых датчиков, блок датчика давления и аналоговых датчиков, а также кабельный интерфейс, цифровой приемопередатчик, одноплатную ЭВМ и блок питания, связанные посредством системной шины данных и управления, причем выходы синтезатора СЗС подключены к первым входам блоков ГБОН, ГБОВ, АП, ЭЛ и МО, входы-выходы интерфейса сигналов управления подключены ко вторым входам блоков ГБОН, ГБОВ, АН, ЭЛ и МО, выходы которых подключены к входам кабельного интерфейса, цифровой приемопередатчик связан входом-выходом с кабельным интерфейсом, подключенным посредством кабель-троса к модулю МЗ.
ГБОН может быть выполнен в виде гидролокатора бокового обзора дальнего действия с низкой рабочей частотой 30÷34 кГц и шириной полосы обзора на каждый борт судна-носителя до 1700 м, ГБОВ выполнен в виде гидролокатора высокого разрешения с высокой рабочей частотой 100 кГц и шириной полосы обзора на каждый борт судна-носителя до 400 м, а профилограф АЛ выполнен с размером элемента разрешения 0,1 м в диапазоне излучаемых частот от 2 до 8 кГц. Блок нейтральной плавучести может быть выполнен из секций сферопластика с плотностью 650 кг/м3, размещен в верхней части гидроакустического модуля ГМ.
Фототелевизионный модуль ФТМ содержит подключенные к блоку электроники телекамеру, цифровую фотокамеру, снабженный модемом связи блок телеметрии и блок светильников, который включает, по крайней мере, два светильника заливающего света и импульсный светильник, а также связанные входами-выходами с блоком электроники блок стабилизации альтитуды ФТМ над морским дном, блок лазерных масштабирующих элементов и подключенные к блоку электроники эхолот-альтиметр, датчик крена-дифферента и гидроакустический приемник для определения местоположения ФТМ относительно судна-носителя, причем вход-выход блока телеметрии кабель-тросом подключен к модулю МЗ.
Блок стабилизации альтитуды ФТМ над морским дном оснащен подруливающим устройством типа «гребной винт в насадке» с возможностью регулирования альтитуды ФТМ за счет тяги движителя подруливающего устройства от 2 м на погружение до 5 м на всплытие.
Блок лазерных масштабирующих элементов включает три лазера для формирования трех параллельных лазерных лучей с заданными расстояниями между ними с последующим определением размеров подводного объекта по его фотоизображению и точкам падения лазерных лучей на этот подводный объект.
Модули МЗ, ГМ и ФТМ размещены в сварных пространственных стержневых конструкциях (рамах), которые выполнены из труб круглого сечения и снабжены кронштейнами и ложементами, выполненными из листовой стали, на которых посредством ленточных хомутов или резьбовых соединений закреплено оборудование и герметичные боксы с аппаратурой.
Блок управления работой ЗЧК, блок сбора данных измерений и блок обработки и регистрации информации, включенные в бортовую часть БЧ комплекса, выполнены на базе подключенных к мониторам персональных компьютеров с соответствующим программным обеспечением и с возможностью функционирования в формате in situ с синхронизацией измерений и данных МЗ, ГМ и ФТМ в едином времени по сигналам СРНС. В качестве аппаратуры СРНС может быть использована аппаратура СРНС «НАВСТАР» и/или «ГЛОНАСС», либо их дифференциальный вариант, а в качестве аппаратуры ГНС - аппаратура гидроакустической навигации с короткой или ультракороткой базой.
Однако известный комплекс характеризуется сложностью конструктивного исполнения, существенными массогабаритными характеристиками, что практически исключает его применение для работ на шельфовых районах с маломерных судов, при этом возникает необходимость привлечения большого числа обслуживающего персонала, что в конечном итоге увеличивает расходы на обслуживание и проведения работ.
Раскрытие изобретения
Задачей настоящего изобретения является устранение недостатков, присущих перечисленным выше аналогам, посредством разработки надежной конструкции устройства (буксируемого тела) для картографирования объектов морского дна и их визуальной заверки при погружении на глубину до 500 м.
Техническим результатом изобретения является создание более мобильного, компактного и надежного устройства при упрощении его конструкции.
Поставленная задача решается тем, что устройство для картографирования объектов морского дна и их визуальной заверки содержит несущую рамную конструкцию в форме параллелепипеда, включающую соединенные между собой продольные и поперечные элементы, и снабженную подвесом для крепления кабель-троса для буксировки, с размещенными на рамной конструкции стабилизаторами курсовой устойчивости (для обеспечения прямолинейного хода устройства), по меньшей мере, одним блоком электроники, одним оптическим блоком и одним акустическим блоком, при этом акустический и оптический блоки подключены к блоку электроники и содержат функциональные элементы, реализующие функциональное назначение упомянутых блоков,
где оптический блок, включает, по меньшей мере, две видеокамеры, закрепленные со стороны передней части рамной конструкции посредством крепежных элементов с взаимно перпендикулярным размещением их оптических осей - одна из которых ориентирована по курсу, вторая - вниз, и возможностью поворота видеокамер, по меньшей мере, относительно поперечных элементов рамной конструкции, на которых могут быть закреплены упомянутые камеры; по меньшей мере, четыре лазерных целеуказателя, расположенные вокруг, по крайней мере, одной из видеокамер с параллельным расположением их оптических осей; модуль освещения, включающий закрепленные на основании светодиодные лампы, и размещенный со стороны нижней задней части рамной конструкции с возможностью изменения угла поворота относительно поперечного элемента рамной конструкции, на котором может быть закреплен упомянутый блок;
блок электроники представляет собой герметично размещенные в цилиндрическом корпусе плату управления функциональными элементами блоков и передачи данных, плату гидролокатора бокового обзора, блоки питания и коммутации, при этом блок электроники размещен на ложементе, который закреплен в нижней задней части рамной конструкции и снабжен разъемами для подключения к судовому блоку управления;
акустический блок включает гидролокатор бокового обзора с двумя антеннами, размещенными на рамной конструкции в продольном направлении и закрепленными с нижней стороны ложементов, а также альтиметр, закрепленный на рамной конструкции, при этом антенны и альтиметр вынесены за пределы нижней поверхности рамной конструкции для исключения помех от ее элементов при эксплуатации устройства (исключения предотвращения попадания отраженного сигнала от рамы).
Крепежный элемент для видеокамер выполнен в виде хомута, снабженного выступающими площадками с отверстиями для размещения лазерных целеуказателей. Таким образом, упомянутый крепежный элемент вместе с размещенными в нем видеокамерой и целеуказателями представляет собой единый оптический модуль, который может быть закреплен на раме с возможностью его углового поворота (или поворота относительно поперечной оси, расположенной на пересечении с оптической осью видеокамеры). Количество выступающих площадок с отверстиями может быть выполнено равным четырем, которые расположены на равноудаленном расстоянии друг от друга.
Цилиндрический корпус блока электроники может быть выполнен из алюминиевого сплава АМг6 с толщиной стенок не менее 10 мм. Видеокамеры, лазерные целеуказатели и каждая светодиодная лампа (светодиод) модуля освещения также могут быть помещены в отдельные герметичные корпуса из алюминиевого сплава АМг6 с толщиной стенок не менее 5 мм, обеспечивающие их прочность при рабочей глубине до 500 м. Герметичный корпус светодиодных ламп модуля освещения может иметь участок со ступенчатой внешней поверхностью или может быть снабжен ребрами для увеличения площади внешней поверхности корпуса (для увеличения площади охлаждаемой поверхности), при этом светодиодные лампы размещены на торцевой стенке корпуса и покрыты прозрачной эпоксидной смолой с обеспечением герметичности корпуса.
Стабилизаторы курсовой устойчивости (для обеспечения прямолинейного хода устройства) выполнены в виде двух пластин, размещенных симметрично по бокам рамной конструкции в ее задней части. Пластины имеют выступающую часть за пределы рамной конструкции в ее нижней части, обеспечивающую функцию опорных элементов, при этом модуль освещения расположен между упомянутыми опорными элементами. Пластины стабилизаторов курсовой устойчивости могут быть выполнены из полиэтилена высокого давления толщиной 10-15 мм. Площадь поверхности каждой пластины стабилизатора может составлять 0,7-0,5 от площади боковой поверхности рамной конструкции. Кроме того, пластины стабилизаторов курсовой устойчивости могут иметь выступающую часть за пределы рамной конструкции со стороны верхней части последней с отверстиями для захвата при транспортировке устройства.
Кроме того, заявляемое устройство может быть снабжено двумя рамными элементами, размещенными симметрично по бокам рамной конструкции в ее передней части, при этом верхняя часть рамных элементов выполнена в виде ручек-захватов, а нижняя часть - в виде опорных элементов, расположенных на одном уровне с опорными элементами пластин - стабилизаторов курсовой устойчивости.
Место крепления кабель троса к подвесу для буксировки расположено по курсу перед стабилизаторами курсовой устойчивости.
Рамная конструкция может иметь следующие габариты: длину 1300-1700 м, ширину 300-600 м, высоту 400-700 м.
Рамная конструкция может быть выполнена из нержавеющей стали, а крепежные элементы для видеокамер - из полиэтилена высокого давления с обеспечением гальванической развязки между рамной конструкцией и корпусом видеокамеры. В конкретном варианте выполнения рамная конструкция выполнена из металлических уголков, снабженных перфорированными регулировочными отверстиями для установки крепежных элементов.
Помимо перечисленных функциональных элементов и блоков, заявляемое устройство может быть дополнительно снабжено гидрофизическим зондом СТД, и/или глубомером, и/или профилографом, и/или гидролокатором кругового обзора, фотокамерой, а модуль освещения содержит такое количество светодиодных ламп, которое обеспечивает создание совокупного светового потока не менее 3000 лм.
Таким образом, по сравнению с наиболее близким аналогом заявляемое устройство характеризуется меньшими массогабаритными характеристиками, имеет более простую конструкцию, что обеспечивает его применение для работ на шельфовых районах с маломерных судов. Масса устройства (в воздухе) составляет около 20 кг, масса бортовой аппаратуры - не более 8 кг (с ЭВМ), в отличие аппарата - аналога, масса подводной части которого составляет 120 кг, масса бортовой аппаратуры - от 100 кг без учета массы ЭВМ и периферийных устройств. Кроме того, заявляемое устройство имеет оптический блок, включающий лазерные целеуказатели с параллельным расположением их оптических осей, что дает возможность более точно измерять размеры объектов, а также определять уровень наклона обследуемой поверхности дна относительно аппарата.
Заявляемое устройство характеризуется детальностью, точностью, достоверностью и надежностью съемки морского дна. При этом обеспечивается возможность работы устройства в режиме реального времени с сохранением полученных данных (измерений) как на подводном, так и надводном блоках электроники. Кроме того, устройство характеризуется простотой его сборки, эксплуатации и ремонта, возможностью замены вышедших из строя как функциональных блоков заявляемого устройства, так и отдельных элементов данных блоков.
Кроме того, разработанная конструкция рамы для буксируемого тела позволяет использовать различный комплекс (набор) оборудования для проведения подводных исследований - различные виды датчиков (давления, температуры, солености воды) или гидрофизический зонд СТД (солености, температуры и давления), альтиметр, профилограф, гидролокаторы бокового обзора, гидролокаторы кругового обзора, фото и видео камеры, и осветительное оборудование и др., адаптируя его под конкретные задачи, меняя конфигурацию на борту судна-носителя, что сможет обеспечить проведение качественных работ по картографированию объектов. Таким образом, заявляемое устройство характеризуется многовариантной возможностью его использования для проведения различного спектра исследований за счет изменения комплектности устройства, которую можно поменять в течение нескольких часов силами одного специалиста на палубе транспортного средства. Такие характеристики обеспечивают возможность осуществления широкого комплекса работ за один рейс в рамках одного прохода судна.
Заявляемое устройство можно использовать для детальных подводно-осмотровых работ. Для решения данной задачи буксируемое тело может быть оснащено видеокамерами, гидролокаторами бокового обзора, профилографом и многолучевым эхолотом, которые обеспечивают «общую картину» исследуемых объектов в режиме онлайн работы, и, в случае необходимости, получение более детальных данных и/или визуальной заверки найденных неоднородностей при размещении буксируемого тела с оборудованием для фото и видео съемки на необходимой глубине. Таким образом, заявляемое устройство позволяет осуществлять трехмерное картирование за счет одновременного сбора разных типов геофизических и гидрографических данных, получаемых за один проход, с разных типов оборудования с возможностью их визуальной заверки, консолидации этих данных, поступаемых на программно-вычислительный комплекс, экспресс-обработки и интерпретации.
Конструкция буксируемого тела характеризуется прочностью, позволяющей вести работы на глубине до 500 м за счет размещения большей части элементов устройства внутри рамной конструкции, а оставшейся части, выступающей за пределы рамной конструкции, с обеспечением их защиты элементами конструкции. Кроме того прочность и надежность конструкции обеспечивается также выполнением элементов оптического блока в защитных усиленных корпусах, а также элементов крепления, и т.д.
Несущая рамная конструкция в совокупности с закрепленными на ней конструктивными элементами обеспечивают требуемые параметры, характеризующие траекторию движения по курсу, скорость и глубину погружения, уменьшение рысканий и дифферента буксируемого тела, его стабилизацию по крену (вращательное движение вокруг продольной оси). В существующих способах проведения гидрологических работ (съемка рельефа дна, поиск затонувших объектов, мониторинг трубопроводов и т.д.) точность определения параметров посредством используемых гидроакустических средств в основном оценивается по точности определения места судна-носителя и буксируемого тела. Однако при детальной съемке точность привязки исследуемых подводных элементов к координатам в значительной степени определяется положением на дне пятна, освещаемого гидроакустическим средством. Положение этого пятна, в свою очередь, зависит от ориентации и глубины погружения буксируемого тела (см., например: В.Н. Завгородний. О влиянии погрешностей ориентации и глубины погружения буксируемого подводного аппарата на точность съемки рельефа дна // Записки по гидрографии. Л., ГУНиО МО РФ, №253, 2001, с. 33). Качество гидроакустических зондирований подводных объектов в первую очередь зависит от точности стабилизации положения буксируемого тела по глубине, рысканию, дифференту и крену. Требования к точности стабилизации положения буксируемого тела, как правило, определяются шириной характеристики направленности гидроакустического средства, соответственно в горизонтальной и вертикальной плоскостях. В известных устройствах глубина погружения регулируется длиной кабель-троса, а стабилизация ориентации по дифференту и рысканию определяется обводами корпуса буксируемого тела, местом крепления кабель-троса к корпусу буксируемого тела, фиксированным положением рулей. Кроме того, траектория движения буксируемого тела по глубине и ориентация по рысканию и дифференту зависят от скорости буксировки, подводных течений и воздействия волнения моря на судно-носитель. Как показывают проведенные исследования наибольший вклад в радиальную погрешность измерений вносят погрешности съемки из-за рыскания, крена и дифферента БПА. Немаловажным фактором является и производительность съемки рельефа дна. Производительность съемки рельефа дна зависит от скорости буксируемого тела и ширины обследуемой полосы рельефа дна. При увеличении полосы съемки рельефа дна точность съемки ухудшается, что требует повышения кратности зондирования рельефа дна посылками импульсов и, следовательно, ведет к уменьшению скорости буксировки. Скорость буксировки также оказывает противоречивое влияние на качество съемки. При увеличении скорости точность улучшается из-за лучшей стабилизации ориентации и глубины, а кратность зондирования рельефа дна гидроакустическим средством для повышения точности уменьшается, т.е. имеет место задача оптимизации выбора скорости буксировки и ширины полосы, обследуемой гидроакустическим средством. Заявляемая конструкция буксируемого тела обеспечивает требуемые параметры по точности и достоверности получаемых данных. Краткое описание чертежей
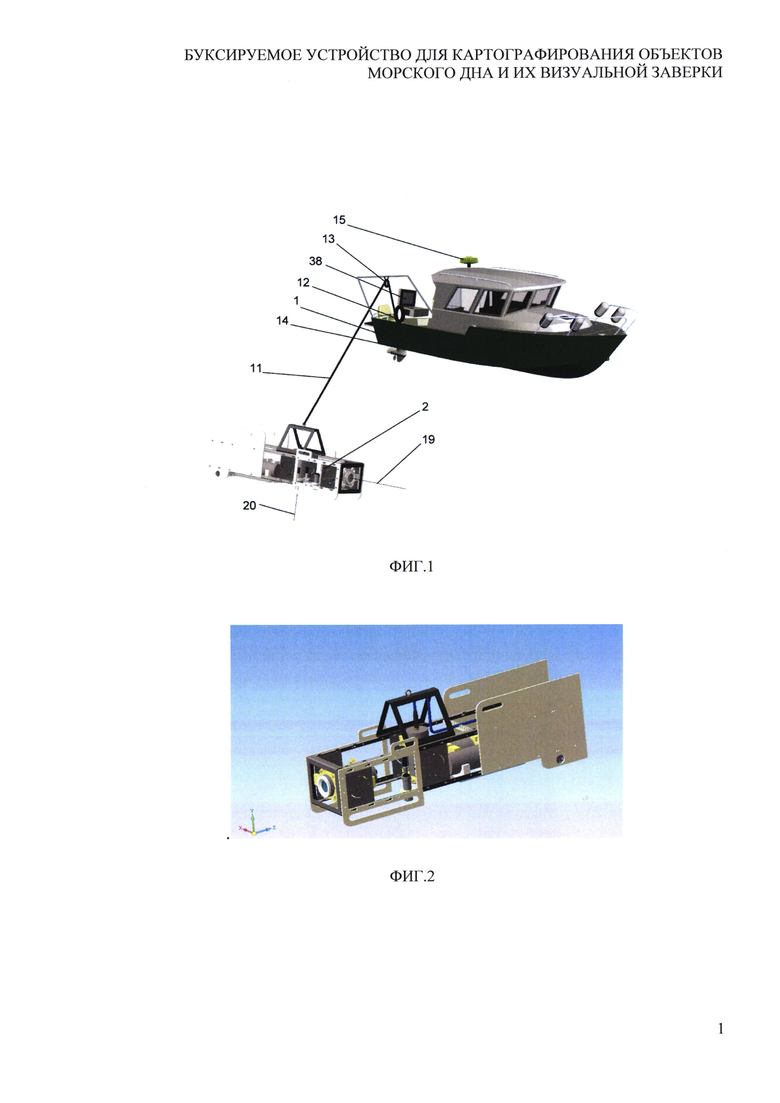
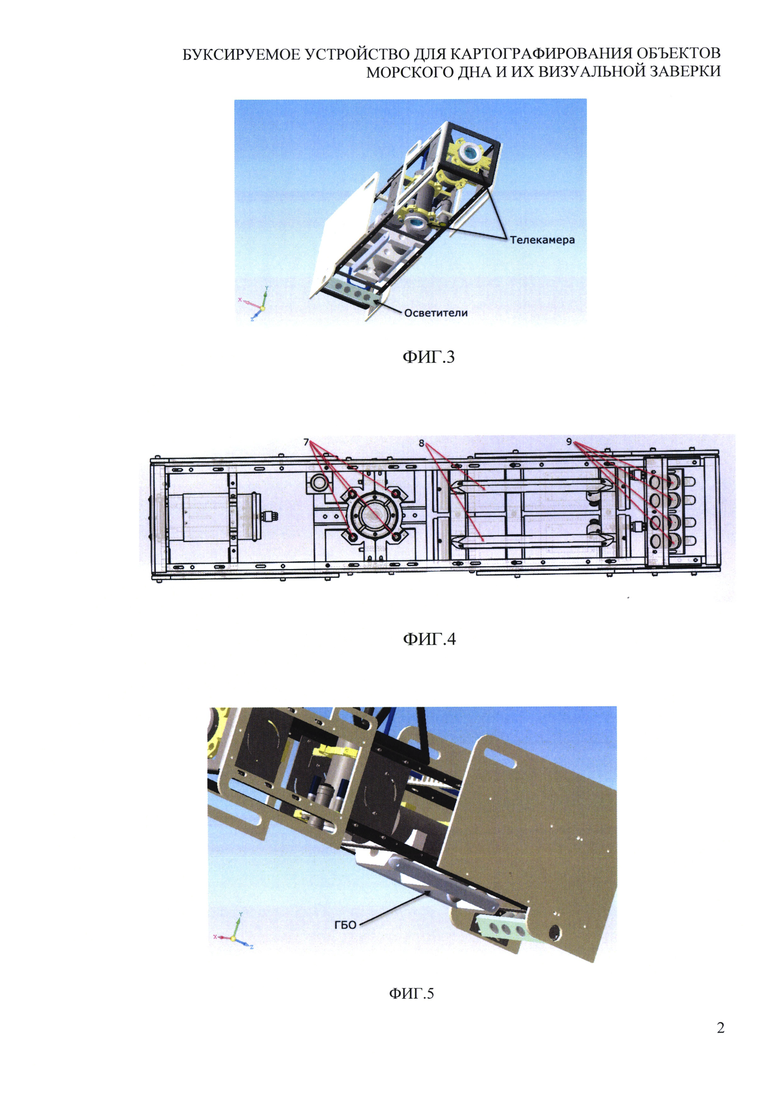
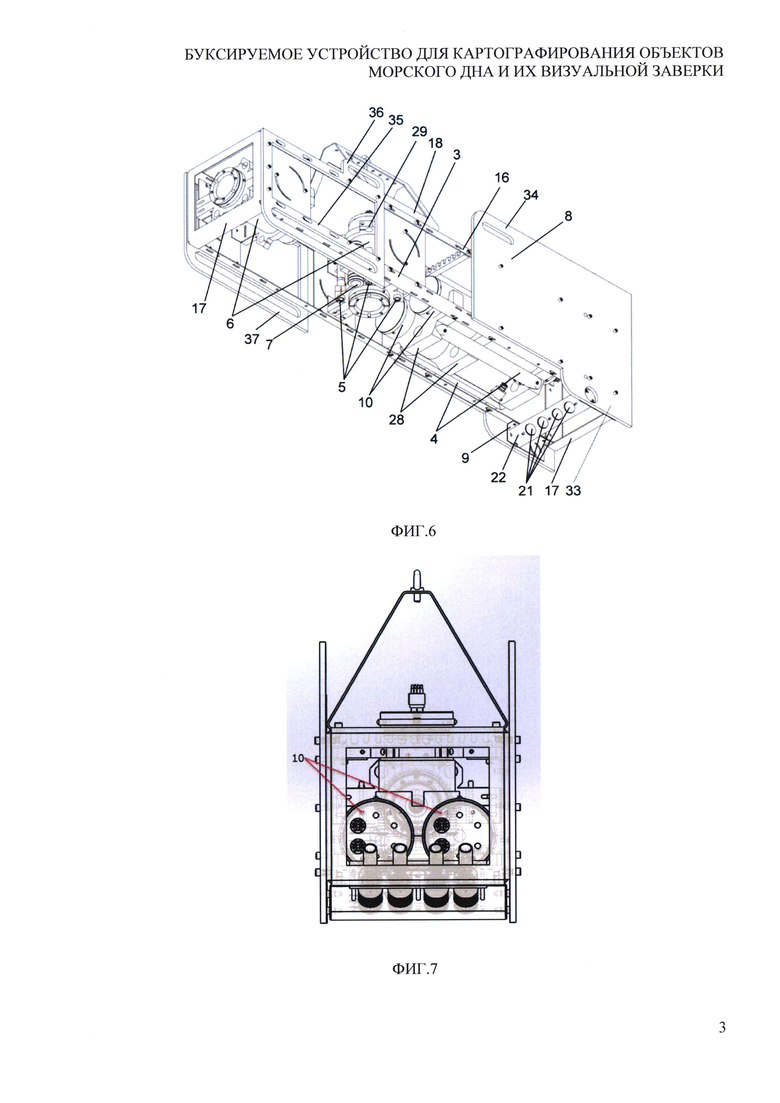
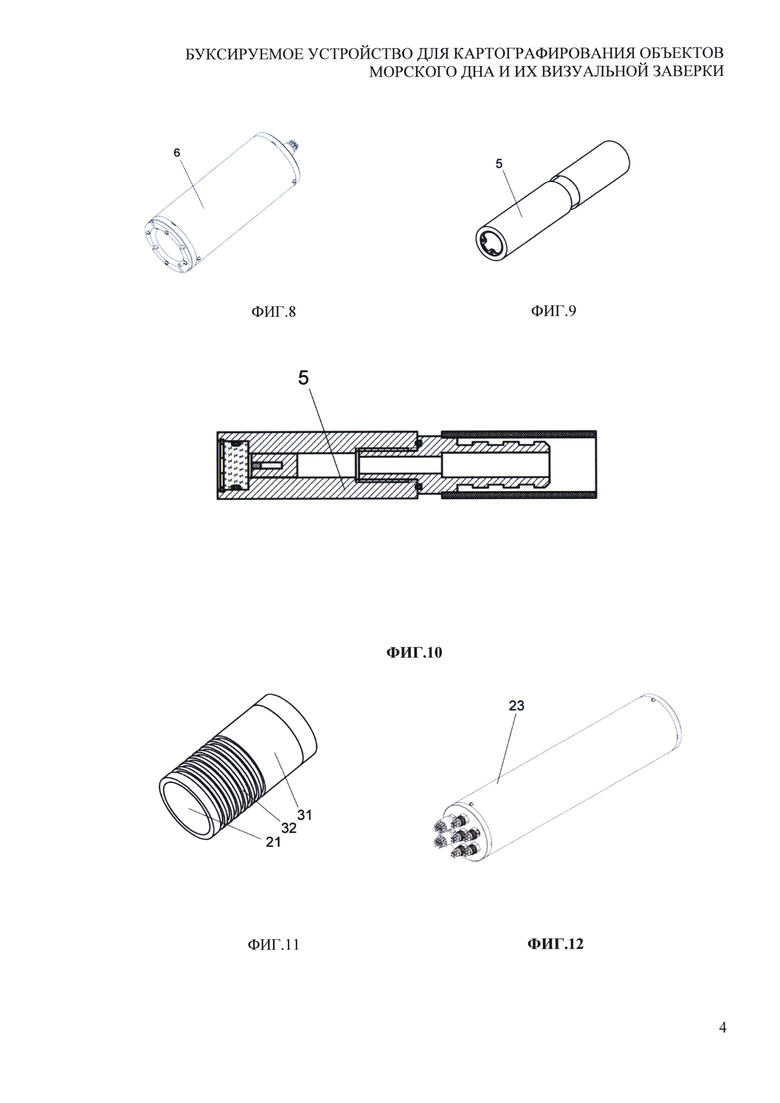
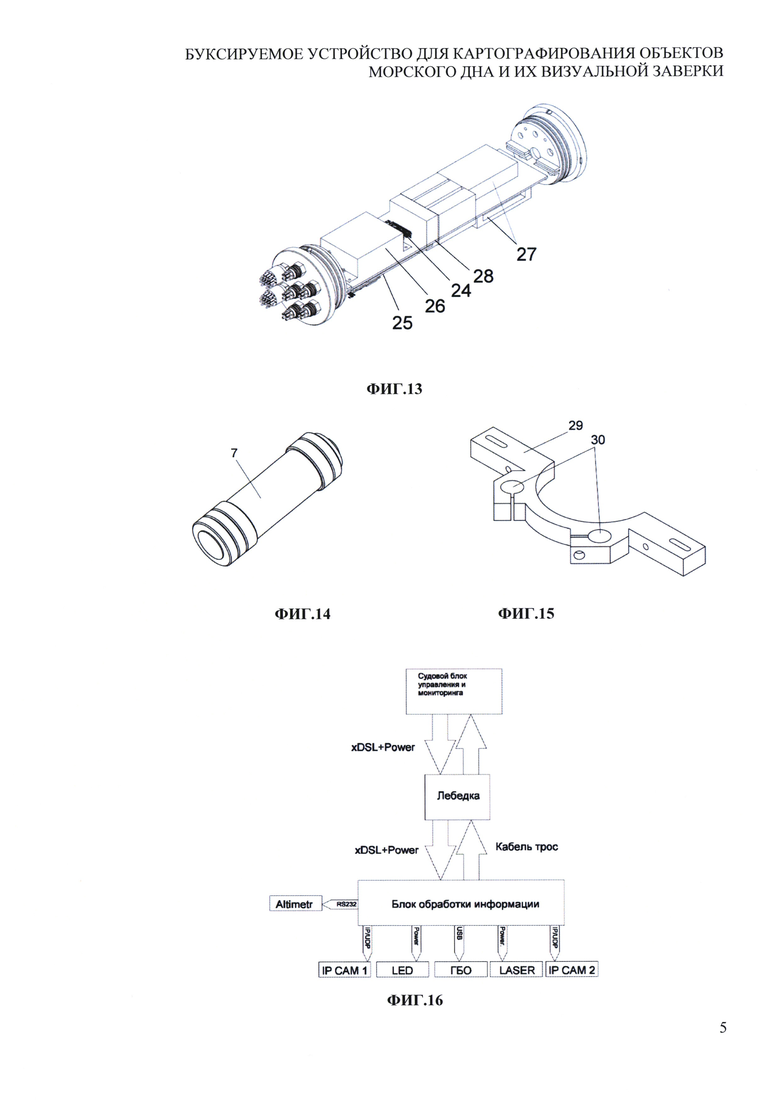
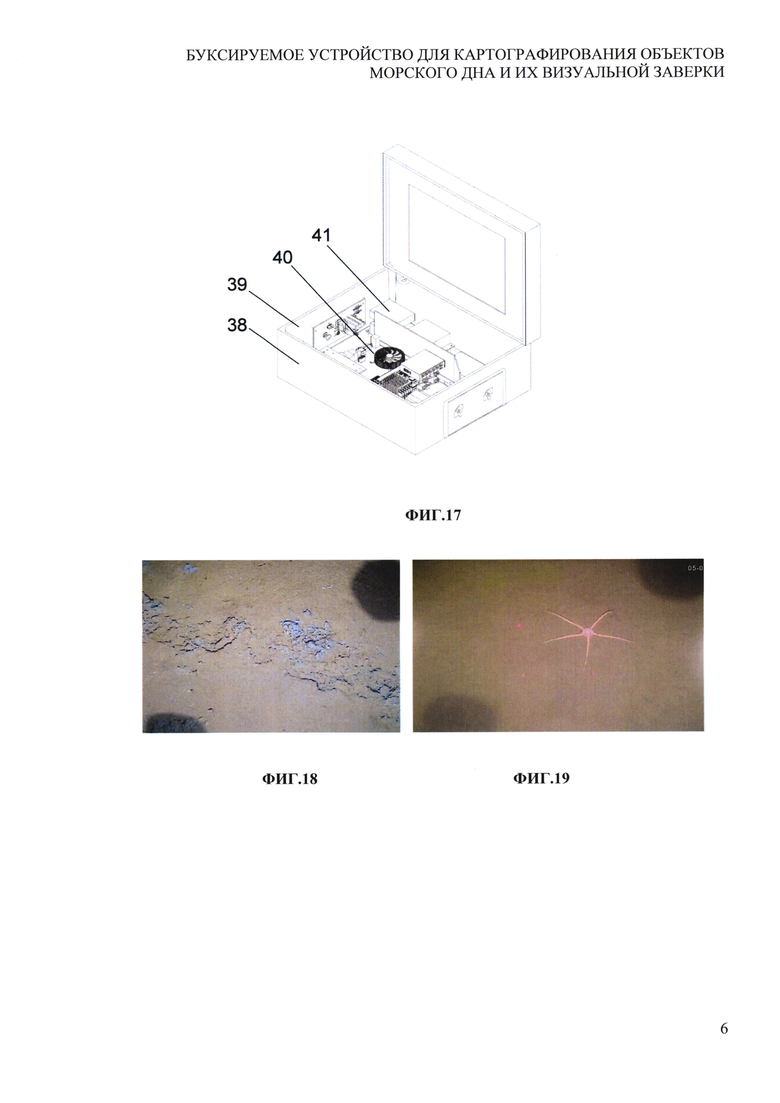
Изобретение поясняется чертежами, где на фиг. 1 представлена схема проведения исследований морского дна с помощью заявляемого устройства (буксируемого тела); на фиг. 2 - заявляемое устройство, общий вид; на фиг. 3, 4 - заявляемое устройство, вид снизу; на фиг. 5 - «хвостовая» часть заявляемого устройства, вид сбоку на размещение антенн гидролокаторов бокового обзора; на фиг. 6 - передняя часть заявляемого устройства, общий вид; на фиг. 7 - заявляемое устройств, вид сзади; на фиг. 8 - видеокамера, общий вид; на фиг. 9, 10 - лазерный указатель, общий вид и продольный разрез, соответственно; на фиг. 11 - общий вид светодиодной лампы, размещенной в отдельном корпусе; на фиг. 12 - схематичное изображение корпуса электроники (подводный блок); на фиг. 13 - вариант компоновки блока электроники (подводного блока электроники); на фиг. 14 - альтиметр в сборе, общий вид; на фиг. 15 - крепежный элемент видеокамеры, общий вид; на фиг. 16 - блок-схема работы заявляемого устройство совместно с судовым блоком управления и мониторинга (судовым блоком электроники); на фиг. 17 - компоновка судового блока (набортный блок электроники); на фиг. 18, 19 - фрагменты видеоизображений картирования морского дна.
Позициями на фигурах обозначены:
1 - судно грузоподъемностью не менее 350 кг,
2 - буксируемое тело,
3 - несущая рамная конструкция,
4 - антенна гидролокатора бокового обзора (ГБО),
5 - лазерные целеуказатели, для нормализации изображения,
6 - видеокамеры,
7 - альтиметр для определения возвышения над поверхностью,
8 - стабилизаторы курсовой устойчивости (обеспечения прямолинейного хода) («хвостовые» стабилизаторы),
9 - модуль освещения,
10 - блок электроники,
11 - кабель-трос на ручной или моторизированной катушке,
12 - катушка кабель-троса,
13 - блок-счетчик для определения заглубления буксируемого тела,
14 - промерный эхолот, записывающий рельеф дна,
15 - система GPS\Глонас, для записи курса и привязки карты дна и съемки к координатный сетке, для последующей привязки к ГИС системам и мозаике аэрофотосъемки,
16 - продольные элементы рамной конструкции,
17 - поперечные элементы рамной конструкции,
18 - подвес крепления кабель-троса для буксировки,
19 - оптическая ось первой видеокамеры,
20 - оптическая ось второй видеокамеры,
21 - светодиодные лампы (светодиоды),
22 - основание для крепления светодиодных ламп,
23 - цилиндрический корпус блока электроники,
24 - плата управления функциональными элементами оптического и акустического блоков и передачи данных,
25 - плата гидролокатора бокового обзора,
26 - блок питания,
27 - блок коммутации,
28 - ложемент для размещения блока электроники,
29 - крепежный элемент видеокамеры,
30 - выступающие площадки крепежного элемента видеокамеры с отверстиями для размещения лазерных целеуказателей (ЛЦУ),
31 - корпус светодиодных ламп модуля освещения,
32 - ступенчатый рельеф внешней поверхности корпуса светодиодных ламп модуля освещения или ребра для увеличения площади внешней поверхности,
33 - выступающая часть пластины стабилизатора курсовой устойчивости со стороны ее нижней части, обеспечивающую функцию опорных элементов,
34 - выступающая часть пластины стабилизатора курсовой устойчивости со стороны ее верхней части, в виде ручек-захватов,
35 - передние обтекатели в виде рамных элементов,
36 - верхняя часть рамных элементов в виде ручек-захватов,
37 - нижняя часть рамных элементов в виде опорных элементов,
38 - судовой блок электроники,
39 - ударопрочный кейс,
40 - персональный компьютер,
41 - судовой блок питания.
Осуществление изобретения
Устройство для картографирования объектов морского дна и их визуальной заверки в источниках научно-технической информации может иметь различные наименования, например, буксируемое тело, или забортная буксируемая аппаратура/комплекс, или подводный необитаемый буксируемый аппарат.
Заявляемое изобретение может быть использовано в составе подводного аппаратного комплекса (ПАК).
Подводный аппаратный комплекс (ПАК) - техническое устройство, перемещающееся в толще воды и (или) по дну и используемое для научных исследований, поисковых и аварийно-спасательных операций, а также производственных работ под водой. В частности, подводные аппараты применяются для проведения геологических и геофизических измерений вблизи океанского дна с целью изучения геологического строения дна океана, состава слагающих его пород, поиска и разведки месторождений полезных ископаемых в Мировом океане, а также при эксплуатации месторождений, для осмотра и ремонта буровых платформ и т.п. Вычислительный комплекс получает всю необходимую информацию о состоянии объекта, в том числе о регулируемых и управляемых величинах. Характерной особенностью рассматриваемого вида системы является то, что задачи анализа поступающей информации, принятие решений, а также осуществление управляющих воздействий возлагаются на оператора.
Конструктивно ПАК содержит установленный на судне судовой блок электроники 38, связанный с устройством 2, например, посредством кабеля-троса 11, подводный модуль (буксируемое тело/забортная буксируемая аппаратура - техническое устройство, перемещающееся в толще воды), при этом бортовой обрабатывающий модуль выполнен с возможностью передачи информации, сбора и обработки данных, управления буксируемым телом.
Заявляемое устройство в составе ПАК для картографирования объектов морского дна и их визуальной заверки может работать с передачей данных на борт судна как по кабель-тросу 11, так и в автономном режиме. В автономном режиме работы комплекс можно использовать на малых судах, не имеющих лебедки для кабель-троса, а также для работы на средних глубинах. Пример схемы размещения и эксплуатации заявляемого устройства (буксируемого тела) показан на фиг. 1.
Буксируемое тело 2 содержит рамную конструкцию и размещенные на ней блок электроники 10, оптический и акустический блоки, крепежные узлы/элементы, систему стабилизаторов курсовой устойчивости 8 для обеспечения прямолинейного хода буксируемого тела, систему буксировки.
Основу буксируемого тела составляет сварная или сборная рамная конструкция торпедовидной формы (например, приближенной к параллелепипеду), которая может быть выполнена из нержавеющей стали - прямоугольной трубы и гнутого уголка, с установленными в ее передней части обтекателями 35 и в задней части стабилизаторами курсовой устойчивости 8 («хвостовым» стабилизатором) (см. фиг. 12 - 7). Такая конструкция обеспечивает хорошую стабилизацию буксируемого тела как на малых скоростях его перемещения для ведения фото и видео съемки, так и на больших скоростях для ведения гидролокационной съемки. При этом уменьшение рысканий и дифферента определяется с помощью «хвостового» стабилизатора 8. Размещение на раме подвеса 18 для крепления кабель-троса для буксировки обеспечивает центровку устройства для стабильного перемещения. На трубах/уголках боковин рамы, продольных и поперечных элементах выполнены прорези, например, фрезерованием, обеспечивающие монтаж и надежное закрепление навесного оборудования с помощью крепежных элементов. Наличие прорезей позволяет закреплять оборудование в произвольных точках рамы, что обеспечивает возможность оптимального его размещения и подбора правильной балансировки буксируемого тела. Утяжеление буксируемого тела может производиться грузами, закрепляемыми за монтажные прорези рамы, или установкой дополнительных балластных поперечин, например, залитых свинцом. Закрепление буксируемого тела на тросе или на кабель-троссе производят при помощи такелажных скоб, продетых в отверстия подвеса для буксировки.
Рамная конструкция может быть изготовлена из высоколегированной низкоуглеродистой стали AISI316L, устойчивой к морской воде. Использование этой марки стали, условно совместимой с алюминиевыми сплавами, позволяет монтировать на рамную конструкцию оборудование в алюминиевых корпусах. Для обеспечения дополнительной коррозионной защиты могут быть установлены на раму цинковые протекторные аноды, площадь которых подбирают в зависимости от конкретного материала и площади корпусов оборудования.
Стабилизаторы курсовой устойчивости закреплены жестко в задней части («хвостовой» части) рамной конструкции и в одном из вариантов реализации изобретения представляют собой плоские элементы (пластины), изготовленные из полипропилена. Отрицательный угол атаки буксируемого тела может регулироваться посредством изменения точек крепления буксировочного троса и перераспределения балластного груза.
Решение рамной конструкции с системой стабилизаторов курсовой устойчивости и обтекателями обеспечивает наименьшую парусность устройства за счет уменьшения лобового сопротивления, облегчает его спуск-подъем на борт обеспечивающего судна, что в целом приводит к мобильности работы с данным устройством. Размещение элементов для буксировки обеспечивает центровку устройства для его стабильного перемещения.
Основная комплектация буксируемого тела предусматривает установку на нем оптического и акустического блоков, блока электроники (подводного блока). Оптический и акустический блоки соединены с блоком электроники посредством герметичных кабельных разъемов, подводный блок электроники посредством сигнальных жил кабель-троса соединен с бортовым блоком электроники.
Ниже представлено более подробное описание блоков и входящих в них функциональных элементов.
Оптический блок включает, по меньшей мере, две видеокамеры 6, закрепленные на рамной конструкции посредством крепежных элементов в передней ее части, с взаимно перпендикулярным размещением их оптических осей - одна из которых ориентирована по курсу, вторая - вниз, и возможностью поворота относительно поперечных элементов рамной конструкции, на которых закреплены упомянутые камеры; по меньшей мере, четыре лазерных целеуказателя 5, расположенные вокруг, по крайней мере, одной из видеокамер с параллельным расположением их оптических осей; модуль освещения, включающий закрепленные на основании светодиодные лампы 21, размещенный в нижней задней части рамной конструкции с возможностью изменения угла поворота относительно поперечного элемента рамной конструкции, на котором закреплен упомянутый блок.
При комплектации оптического блока может быть использована погружаемая видеокамера, например, IP-видеокамера Full HD (1920×1080@50 fps; 3 МР:2048×1536@15 fps;5 МР:2592×1920@10 fps), заключенная в прочный герметичный корпус из коррозионно-стойкого алюминиевого сплава (например, Амг6) (см. фиг. 8). Камера позволяет передавать видеоизображение с разрешением, достаточным для уверенного распознавания подводных ландшафтов в целях визуального подтверждения картирования ландшафтов дна. Корпус состоит из трубчатого корпуса, прижимной шайбы иллюминатора и задней крышки. Плата видеокамеры жестко смонтирована внутри корпуса. Переднюю стенку корпуса занимает иллюминатор из силикатного стекла, уплотненный торцевым кольцом. Соединения частей корпуса уплотнены торцевыми уплотнениями с использованием резиновых колец. Детали корпуса соединены между собой на болтах с внутренним шестигранником из нержавеющей стали, гальванически совместимой с материалом корпуса. На задней крышке смонтирован герметичный электрический разъем для подключения к сети передачи данных устройства, например, разъем типа SubConn.
Лазерные целеуказатели (указатели) размещают на рамной конструкции таким образом, чтобы проецируемые ими изображения точек на исследуемое дно попадало в поле зрения камеры для обеспечения определения положения буксируемого тела относительно грунта и определения размеров исследуемых объектов.
Подводный лазерный целеуказатель представляет собой герметичный модуль (см. фиг. 9, 10). Питание указателя может быть автономным от встроенных аккумуляторов или осуществлено по проводу от блока электроники. В одном из вариантов осуществления изобретения были использованы лазерные целеуказатели со следующими характеристиками: светодиоды TXL-04; мощность 5 мВт; длина волны 650 нМ; цвет точки красный; напряжение питания 5 В, рабочая глубина 500 м, габариты 40×40×65 мм (без кронштейнов крепления и гермоввода), 40×40×140 мм (вместе с гермовводом, без кронштейнов крепления), 70×80×140 мм (вместе с гермовводом и кронштейнами крепления).
Лазерный целеуказатель был собран в корпусе из коррозионно-стойкого алюминиевого сплава АМг6. Указатель размещен в соответствующем отверстии крепежного элемента - хомута (см. фиг. 15), состоящего из двух частей, стягиваемых резъбовым соединением. В задней части корпуса лазерного целеуказателя расположен гермоввод выполненный из коррозионно-стойкого алюминиевого сплава АМг6 для подключения к блоку электроники. Герметизация лазерного целеуказателя осуществлена стеклянным иллюминатором на кольцевом уплотнении, прижатом стопорным кольцом с максимально уменьшенной полостью для образования воздушного кармана. Корпус лазера выполнен разборным, позволяющим, при необходимости, произвести замену лазера.
Блок освещения (светодиодный осветительный блок) представляет собой размещенные на основании светодиодные лампы (см. фиг. 11), расположенные каждая в своем герметичном корпусе с обеспечением совокупного светового потока не менее 3000 люмен, предпочтительно около 4000 люмен, который обеспечивает работу видеокамер высокого разрешения. Управление блоком освежения может быть реализовано по протоколу I2C, который дает возможность менять конфигурацию осветительной системы для решения конкретной задачи освещения подводных объектов.
Блок освещения установлен под наклоном к нижней поверхности рамы, как показано на фиг. 5 и 6. Такое размещение блока снижает уровень передней засветки в видеокамеру и улучшает качество конечного фото и видео изображения.
В одном из вариантов осуществления изобретения были использованы светодиодные лампы со следующими характеристиками: Optogan X10, сборки по четыре модуля (арт. OCC-0202F10-09A), Световой поток: 4000 лм (в зависимости от конкретного исполнения светодиодной сборки); Цветовая температура: 3000-6500К; Напряжение питания: 24-48 В, Габариты: 45×80 мм (без кронштейнов крепления).
Светодиодные лампы (осветители) были собраны в корпусах из коррозионно-стойкого алюминиевого сплава АМг6. В передней части корпуса размещены светодиоды, в задней части расположены платы драйвера светодиода, плата управления и разъем. Корпус имеет на внешней поверхности проточки для обеспечения оптимального теплоотвода и для предотвращения выхода из строя при случайном включении на поверхности. Отличительной особенностью лампы является то, что светодиод расположен за пределами его прочного корпуса. Это позволяет существенно сократить габариты изделия и обеспечить лучшие условия для охлаждения мощных светодиодов. Герметизация светодиодов осуществлена за счет заливки прозрачным полиуретановым компаундом Poly-OPTIC, имеющим хорошую адгезию к материалу корпуса. Задняя крышка обеспечивает герметизацию корпуса, при этом на ней размещен герметичный разъем питания и управления, в качестве которого может быть использован разъем типа SubConn для подводной аппаратуры, показавший свою высокую надежность. Теплоотвод от вьщеляющих тепло компонентов плат происходит на корпус через слой теплопроводного клея. Драйвер светодиода контролирует его ток, позволяет управлять мощностью осветителя, обеспечивает ограничение яркости при перегреве и аварийное выключение при коротком замыкании. Плата управления реализует логику работы осветителя: контроль за напряжением питания, включение и выключение, изменение мощности, контроль температуры светодиода, снижение мощности и аварийное отключение при перегреве. Команды на управление осветителем плата управления принимает по двум линиям протокола I2С, выведенным на разъем осветителя. По ним же передаются сообщения о состоянии осветителя и о возникновении аварий. При отсутствии внешнего управления, плата переходит в автономный режим работы, обеспечивая максимально возможную яркость осветителя для имеющихся условий питания и охлаждения.
Изменение яркости осветителя может производится за счет широтно-импульсной модуляции тока. Частота модуляции выбрана достаточно высокой, чтобы обеспечить отсутствие влияния мерцания светодиода при видеосъемке с высокой частотой кадров. Кроме того, снижение мерцания обеспечивает выбранная схема драйвера светодиода. Логика работы осветителя может быть реализована программно, на основе микропроцессорного управления, что позволяет гибко изменять ее для учета особенностей конкретных задач. Конструкция платы управления позволяет оперативно перепрограммировать управляющий микроконтроллер, не извлекая плату из корпуса осветителя. Указанная схема размещения блока освещения снижает уровень передней засветки в телекамеру и улучшает качество конечного фото и видео изображения.
Акустический блок включает гидролокатор бокового обзора с двумя антеннами 4, размещенными на рамной конструкции в продольном направлении и закрепленными с нижней стороны ложементов (см. фиг. 5, 6), а также закрепленный на рамной конструкции альтиметр (см. фиг. 14), при этом антенны и альтиметр на рамной конструкции буксируемого тела установлены с возможностью защиты для отражения различных случайных столкновений устройства с объектами, находящимися на дне, а также при транспортировке и такелажных работах.
Гидролокатор бокового обзора (ГБО) является наиболее эффективным средством для проведения подводных поисково-обследовательских работ. Гидролокатор бокового обзора позволяет обследовать большие участки дна и получать данные независимо от прозрачности воды. ГБО работает одинаково хорошо как в пресной, так и в соленой воде, и может использоваться на озерах, реках, заливах и в открытом океане. Основное достоинство гидролокатора бокового обзора - получение в реальном времени высококачественного акустического изображения дна на больших глубинах независимо от типа водоема. При помощи гидролокатора бокового обзора получают эхограмму, являющуюся двухмерным изображением дна. Приемопередающие антенны размещают в нижней задней части рамной конструкции буксируемого тела как показано на фиг. 5 и 6. Существенным при установке антенн ГБО на рамной конструкции буксируемого тела является то, что непосредственно излучатели должны находится за пределами рамы буксируемого устройства, но при этом должны быть защищены дополнительными элементами конструкции рамы в случае случайного столкновения устройства с объектами техногенного и природного характера, находящими на дне, а также при постановке устройства на палубе обеспечивающего судна и при транспортировке устройства до места работ. Рабочая частота гидролокатора бокового обзора во многом определяет возможности прибора. Гидролокаторы с низкой частотой обладают большой дальностью, но сравнительно невысоким разрешением. Гидролокаторы с высокой рабочей частотой имеют меньшую дальность, но намного более высокое разрешение. Двухчастотные гидролокаторы бокового обзора являются наиболее универсальными.
В заявляемой конструкции может быть использован гидролокатор бокового обзора Starfish, предназначенный для поиска различных объектов на дне и в толще воды на глубинах до 500 м. Данный ГБО способен обнаруживать малые объекты, расположенные на близком расстоянии друг от друга, на больших дистанциях, по сравнению со стандартными одночастотными гидроакустическими системами. При необходимости распознания отдельной цели в массиве объектов, плавное изменение частоты излучения позволяет обнаруживать отдельный объект, в отличие от стандартных систем, отображающих один большой объект, вместо нескольких малых, расположенных на близком расстоянии друг к другу. Технология CHIRP также позволяет снизить шумы, что уменьшает риск возникновения интерференции акустического сигнала.
Альтиметр является навигационным прибором с излучающим пьезоэлектрическим элементом, предназначенным для измерения высоты при помощи акустических волн для определения положения буксируемого тела относительно грунта, который в заявляемом буксируемом теле размещен в прочном корпусе (см. фиг. 14). В заявляемом устройстве может быть использован альтиметр со следующими характеристиками: рабочая частота 500 кГц, угол луча 6 градусов, диапазон измерения 0,3-50 м, источник питания от 12V DC 160 mA до 24V DC 80 mA, передача данных RS232, RS485, температура рабочая от -10 до 35ºС, длинна 160 мм, диаметр 47 мм. Альтиметр имеет герметичный разъем для подключения питания и передачи данных. Внутри корпуса размещена электронная часть, имеющая блок формирования импульса с усилителем сигнала, приемник отраженного сигнала, аналого-цифровой преобразователь, интерфейсную часть, настроенную для передачи информации в ПК по RS232 или RS485 интерфейсу. Для достижения корректной работы альтиметра его закрепляют на рамной конструкции буксируемого тела таким образом, чтобы его излучающая сторона находилась горизонтально относительно грунта и между излучающим элементом и грунтом не находилось других элементов конструкции буксируемого тела, а также с учетом различных помех от других оптических/акустических устройств.
Основным узлом буксируемого тела является подводный блок электроники (см. фиг. 12, 13), осуществляющий сбор и первичную обработку поступающих сигналов, напрямую коммутированный с набортным вычислительным комплексом (судовому блоку управления) (см. фиг. 17).
В заявляемом устройстве в зависимости от решаемых задач предложено использовать один или два блока электроники, где каждый блок представляет собой герметично размещенные в цилиндрическом корпусе платы управления функциональными элементами блоков и передачи данных, плату гидролокатора бокового обзора, блоки питания и коммутации (см. фиг. 13), при этом блок электроники размещен на ложементе, который закреплен в нижней задней части рамной конструкции и снабжен разъемом для подключения к судовому блоку управления.
Крепежные элементы для блоков и/или функциональных элементов заявляемого устройства спроектированы, так, чтобы минимизировать соприкосновение окисляющихся материалов. В качестве крепежа камер, светодиодных ламп (фонарей), лазерных целеуказателей использованы элементы из полипропилена Polystone Р (Homopolymer). Особенностью данного материала являются его высокая прочность, стойкость к воздействию высоких температур, свариваемость, стойкость к воздействию химически агрессивных сред и коррозии. Для крепления видеокамер использованы хомуты (см. фиг. 15), которые обеспечивают «развязку» стальных и алюминиевых элементов конструкции, при этом фиксируют видеокамеры, так, что само изделие не касается корпуса конструкции, не вызывая взаимное окисление. Таким образом, видеокамеры крепятся хомутами, которые в свою очередь крепятся к несущей рамной конструкции. Крепеж лазерных целеуказателей представляет собой «эксцентриковый позиционер», который выполнен заодно с хомутом. Лазерные целеуказатели, установленные в данный крепежный элемент по схеме, обозначенной на фиг. 6, обеспечивают возможность их калибровки в 4-х точках лазерной сетки.
Заявляемое устройство работает следующим образом.
В зависимости от поставленной задачи оператор принимает решение о необходимой скорости движения судна для работы с видеокамерами и ГБО, а также в комбинированном режиме. При работе с видеокамерами после погружения и приближения ко дну на глубину от 4 до 1 м (в зависимости от прозрачности), определяемую по альтиметру, оператор включает видеокамеры высокого разрешения, лазерные целеуказатели и осветители, после выхода на объект съемок оператор включает запись видеокамер. Расстояние от устройства до дна контролируется по альтиметру и регулируется путем количества вытравленного кабель-тросса. При работе с ГБО также по альтиметру определяется необходимая глубина. После чего оператор включает гидролокатор бокового обзора, настраивает необходимую дальность съемки и осуществляет запись. Как и в случае работы с видеокамерой оператор расстояние от устройства до дна контролирует по альтиметру и регулирует путем количества вытравленного кабель-тросса. Все данные поступающие с устройства по кабель-тросу поступают на пульт оператора в режиме реального времени с установленным программным обеспечением, необходимым для работы. Блок-схема работы заявляемого устройства совместно с судовым блоком управления и мониторинга (судовым блоком электроники) представлена на фиг. 16.
Контроль спуско-подъемных операций буксируемого тела при проведении различных изысканий на акваториях может осуществляться через блок-счетчик, который включает блок счета, коммутационный кабель, блок контроля. Измеряемый кабель/трос, проходя через механический блок, вращает его, магниты, закрепленные на блоке, обеспечивают срабатывание датчиков Холла, находящихся в модуле датчиков. Счетчик импульсов принимает сигналы от модуля датчиков, и в зависимости от направления вращения, интерпретирует сигналы как прямой или обратный счет. Далее счетчик, используя заранее заложенный коэффициент, преобразует импульсы в расстояние пройденное кабелем/тросом. Текущая длина измеряемого кабеля/троса отображается на сегментном дисплее.
Система сбора и хранения данных, размещаемая на судне (судовой блок).
Судовой блок 38 состоит из ударопрочного кейса 39, в котором установлена система на основе персонального компьютера 40 Gigabyte GA-H110TN-M (см. фиг. 17). Система осуществляет сбор данных с буксируемых подводных цифровых видеокамер высокого разрешения, интерфейсных преобразователей RS232 в Ethernet для подключения различных периферийных устройств, таких как GPS, эхолот, метеоданные и т.д. Судовой блок оснащен судовыми блоками питания 41 с напряжением 72 В для питания буксируемых систем. Канал связи имеет технологию VDSL2 и способен передавать данные цифровых устройств на расстояние до 1500 м.
Судовой блок 38 выполнен с возможностью управления освещением - каждой светодиодной лампой. Для управления яркостью лампы применяется микроконтроллер ATMega328P, контролирующий значение предельного тока через светодиоды и обеспечивающий плавный пуск и диммирование. Система состоит из 2-х плат управления - логической частью схемы платы управления и силовой частью схемы, что позволяет повысить компактность устройства и обеспечить необходимый теплоотвод от температурно нагруженных элементов силовой части схемы путем их непосредственного контакта с корпусом лампы.
Примеры осуществления изобретения.
В соответствии с заявляемым решением было изготовлено буксируемое тело, как показано на фиг. 6, с размерами 1517/328/600 (Длина/Ширина/Высота), обеспечивающими необходимую жесткость конструкции, а также беспрепятственный подъем на судно. Внутри рамной конструкции были расположены элементы электроники в прочных герметичных цилиндрических корпусах. В центральной нижней части располагалась цветная видеокамера высокого разрешения, в задней части устройства расположен блок управления. Модули освещения расположены в задней части устройства под регулируемым углом. Лазерные целеуказатели (ЛЦУ) расположены вокруг телекамер. Устройство имело возможность погружения до 500 м.
Устройство было укомплектовано двумя цифровыми цветными видеокамерами с возможностью записи видео и фотоиображний как на встроенную память, так и передачи в режиме реального времени - Beward BD5260Z18, имеющими следующие характеристики: сенсор -2 Мп, КМОП 1/2.8" SONY Exmor R, разрешение: 1920×1080 (Full HD), 1280×1024 (SXGA), 1280×720 (HD) До 50 (60) к/с; лазерными целеуказателями TXL-04 со следующими характеристиками: длина волны: 650nm, мощность: 5 mW, Тип: точка; светодиодными лампами Optogan XI0 со следующими характеристиками: световой поток 3840 лм, Рабочий ток: 700-2100 mА; гидролокатором бокового обзора StarFish 453 OEM со следующими характеристиками: рабочая частота 450 кГц, ширина горизонтального луча 0.5°, вертикальная ширина луча 60° рабочая глубина 300 м; альтиметром РА500 - Digital Precision Altimeters со следующими характеристиками: рабочая частота, 500 кГц, ширина луча: 6° коническая, диапазон измерений: от 0,3 до 50 м, рабочая глубина: 700 м. Используемые видеокамеры были снабжены моторизированным механизмом для обеспечения плавного изменения фокусного расстояния.
С помощью изготовленного буксируемого тела были проведены полевые мелководные испытания на Беломорской биологической станции (ББС). Проведена серия из 5 спусков. Аппарат опускали на дно недалеко у берега на глубину 10 метров. Время придонной экспозиции от 10 до 15 минут. Проведена проверка спуска и подъема на скоростях от 1 до 30 м/мин. Были получены фото и видеоданные в цифровом виде в режиме онлайн, примеры полученных изображений представлены на фиг. 18 и 19, проверена работоспособность устройств телеметрии.
Кроме того, были проведены натурные морские полевые испытания на средних и больших глубинах. Была проведена серия из 5 глубоководных спусков. Аппарат опускался на глубину 100, 300 и 500 метров на отдельном тросе. Время придонной экспозиции составило от 10 до 15 минут. Проведена проверка спуска и подъема на скоростях от 1 до 30 м/мин. Были получены фото и видеоданные в цифровом виде в режиме онлайн. Проверена работоспособность устройств телеметрии. Скорость буксировки устройства варьировалась от 3 до 10 узлов. Испытания прошли успешно. Вес рамной конструкции буксируемого тела составил 15 кг.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ БЛОК БУКСИРУЕМОГО УСТРОЙСТВА ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2694172C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2023 |
|
RU2836682C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
Изобретение относится к техническим средствам для проведения океанографических и геологических исследований, а именно к автономному погружному оборудованию для мониторинга подводной инфраструктуры, картирования морских биоресурсов, а также их визуализации, для проведения инженерных изысканий под бурение и строительство на шельфе, и в конкретном варианте осуществления может быть использовано в составе подводно-аппаратного комплекса (ПАК) для картографирования объектов морского дна и их визуальной заверки. Устройство для картографирования объектов морского дна и их визуальной заверки содержит несущую рамную конструкцию в форме параллелепипеда, включающую соединенные между собой продольные и поперечные элементы и снабженную подвесом для крепления кабель-троса для буксировки, с размещенными на рамной конструкции стабилизаторами курсовой устойчивости, по меньшей мере одним блоком электроники, одним оптическим блоком и одним акустическим блоком, при этом акустический и оптический блоки подключены к блоку электроники и содержат функциональные элементы. Оптический блок включает по меньшей мере две видеокамеры, закрепленные в передней части рамной конструкции посредством крепежных элементов с взаимно перпендикулярным размещением их оптических осей, одна из которых ориентирована по курсу, вторая - вниз, и возможностью поворота видеокамер; по меньшей мере четыре лазерных целеуказателя, расположенных вокруг по крайней мере одной из видеокамер с параллельным расположением их оптических осей; модуль освещения, включающий закрепленные на основании светодиодные лампы, размещенный в нижней задней части рамной конструкции с возможностью изменения его угла наклона. Блок электроники размещен в герметичном цилиндрическом корпусе с разъемом для подключения к судовому блоку управления, который закреплен на ложементе, при этом ложемент закреплен в нижней задней части рамной конструкции. Акустический блок включает гидролокатор бокового обзора с двумя антеннами, размещенными на рамной конструкции в продольном направлении и закрепленными с нижней стороны ложементов, а также закрепленный на рамной конструкции альтиметр, при этом антенны и альтиметр вынесены за пределы нижней поверхности рамной конструкции для исключения помех от ее элементов при эксплуатации устройства. 19 з.п. ф-лы, 19 ил.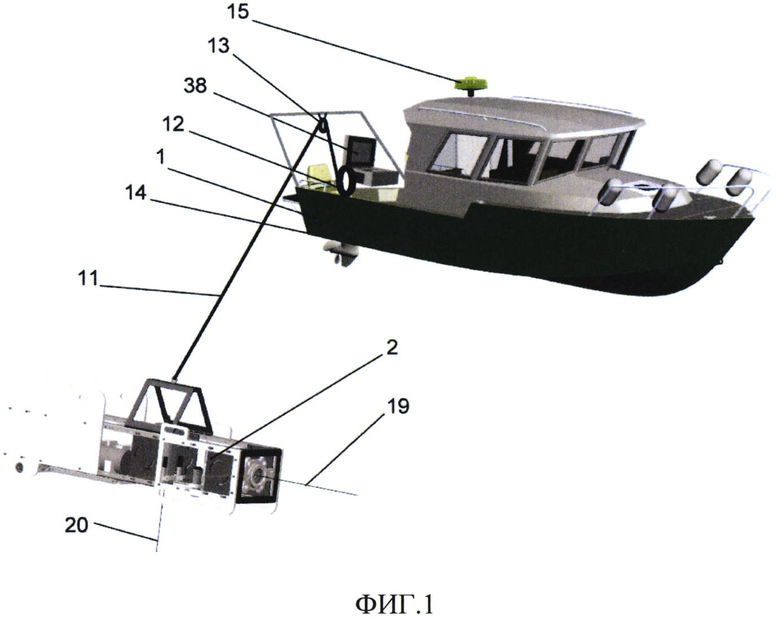
1. Устройство для картографирования объектов морского дна и их визуальной заверки, включающее,
несущую рамную конструкцию в форме параллелепипеда, включающую соединенные между собой продольные и поперечные элементы и снабженную подвесом для крепления кабель-троса для буксировки, с размещенными на рамной конструкции стабилизаторами курсовой устойчивости, по меньшей мере одним блоком электроники, одним оптическим блоком и одним акустическим блоком, при этом акустический и оптический блоки подключены к блоку электроники и содержат функциональные элементы,
где оптический блок включает по меньшей мере две видеокамеры, закрепленные в передней части рамной конструкции посредством крепежных элементов с взаимно перпендикулярным размещением их оптических осей, одна из которых ориентирована по курсу, вторая - вниз, и возможностью поворота видеокамер; по меньшей мере четыре лазерных целеуказателя, расположенных вокруг по крайней мере одной из видеокамер с параллельным расположением их оптических осей; модуль освещения, включающий закрепленные на основании светодиодные лампы, размещенный в нижней задней части рамной конструкции с возможностью изменения его угла наклона;
по меньшей мере один блок электроники, размещенный в герметичном цилиндрическом корпусе с разъемом для подключения к судовому блоку управления, который закреплен на ложементе, при этом ложемент закреплен в нижней задней части рамной конструкции;
акустический блок, включающий гидролокатор бокового обзора с двумя антеннами, размещенными на рамной конструкции в продольном направлении и закрепленными с нижней стороны ложементов, а также закрепленный на рамной конструкции альтиметр, при этом антенны и альтиметр вынесены за пределы нижней поверхности рамной конструкции для исключения помех от ее элементов при эксплуатации устройства.
2. Устройство по п. 1, характеризующееся тем, что крепежный элемент для видеокамеры выполнен в виде хомута, снабженного выступающими площадками с отверстиями для размещения лазерных целеуказателей.
3. Устройство по п. 2, характеризующееся тем, что количество выступающих площадок с отверстиями выполнено равным четырем, которые расположены на равноудаленном расстоянии друг от друга.
4. Устройство по п. 1, характеризующееся тем, что цилиндрический корпус блока электроники выполнен из алюминиевого сплава с толщиной стенок не менее 10 мм.
5. Устройство по п. 1, характеризующееся тем, что видеокамеры, лазерные целеуказатели и каждая светодиодная лампа модуля освещения помещены в отдельные герметичные корпуса из алюминиевого сплава с толщиной стенок не менее 5 мм, обеспечивающие их прочность при рабочей глубине до 500 м.
6. Устройство по п. 5, характеризующееся тем, что герметичный корпус светодиодных ламп модуля освещения имеет ступенчатый рельеф внешней поверхности или снабжен ребрами для увеличения площади охлаждаемой поверхности, при этом светодиодные лампы размещены на торцевой стенке корпуса и покрыты прозрачной эпоксидной смолой с обеспечением герметичности корпуса.
7. Устройство по п. 1, характеризующееся тем, что стабилизаторы курсовой устойчивости выполнены в виде двух пластин, размещенных симметрично по бокам рамной конструкции в ее задней части.
8. Устройство по п. 7, характеризующееся тем, что пластины имеют выступающую часть за пределы рамной конструкции в ее нижней части, обеспечивающую функцию опорных элементов, при этом модуль освещения расположен между упомянутыми опорными элементами.
9. Устройство по п. 7, характеризующееся тем, что пластины стабилизаторов курсовой устойчивости выполнены из полиэтилена высокого давления и имеют толщину 10-15 мм.
10. Устройство по п. 7, характеризующееся тем, что площадь поверхности пластины стабилизатора составляет 0,7-0,5 от площади боковой поверхности рамной конструкции.
11. Устройство по п. 7, характеризующееся тем, что пластины стабилизаторов курсовой устойчивости имеют выступающую часть за пределы рамной конструкции со стороны ее верхней части и снабжены отверстиями для захвата.
12. Устройство по п. 8, характеризующееся тем, что оно снабжено двумя рамными элементами-обтекателями, размещенными симметрично по бокам рамной конструкции в ее передней части, при этом верхняя часть рамных элементов выполнена в виде ручек-захватов, а нижняя часть - в виде опорных элементов, расположенных на одном уровне с опорными элементами пластин - стабилизаторов курсовой устойчивости.
13. Устройство по п. 1, характеризующееся тем, что место крепления кабель-троса к подвесу для буксировки расположено по курсу перед стабилизаторами курсовой устойчивости.
14. Устройство по п. 1, характеризующееся тем, что рамная конструкция имеет длину 1300-1700 мм, ширину 300-600 мм, высоту 400-700 мм.
15. Устройство по п. 1, характеризующееся тем, что видеокамеры и лазерные целеуказатели выполнены с возможностью поворота относительно поперечной оси рамной конструкции, проходящей через оптическую ось видеокамеры.
16. Устройство по п. 1, характеризующееся тем, что рамная конструкция выполнена из нержавеющей стали, а крепежные элементы для видеокамер выполнены из полиэтилена высокого давления с обеспечением гальванической развязки между рамной конструкцией и корпусом видеокамеры.
17. Устройство по п. 1, характеризующееся тем, что рамная конструкция выполнена из металлических уголков, снабженных перфорированными регулировочными отверстиями для установки крепежных элементов.
18. Устройство по п. 1, характеризующееся тем, что оно дополнительно снабжено гидрофизическим зондом СТД, и/или глубомером, и/или профилографом, и/или гидролокатором кругового обзора, фотокамерой.
19. Устройство по п. 1, характеризующееся тем, что светодиодные лампы модуля освещения характеризуются возможностью создания совокупного светового потока не менее 3000 лм.
20. Устройство по п. 1, характеризующееся тем, что блок электроники содержит плату управления функциональными элементами блоков и передачи данных, плату гидролокатора бокового обзора, блоки питания и коммутации.
| Пиковый детектор | 1956 |
|
SU106965A1 |
| МОБИЛЬНЫЕ ПОИСКОВО-ОБСЛЕДОВАТЕЛЬСКИЕ КОМПЛЕКСЫ "НАУТИЛУС" | |||
| Информационное агентство Оружие России | |||
| Солесос | 1922 |
|
SU29A1 |
| В.И | |||
| КАЕВИЦЕР и др., ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КАТЕР С ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА ДЛЯ КАРТОГРАФИРОВАНИЯ ДНА МАЛЫХ ВОДОЕМОВ | |||
| ИЗВЕСТИЯ ЮФУ | |||
| ТЕХНИЧЕСКИЕ НАУКИ | |||
| ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Н.А | |||
| РИМСКИЙ-КОРСАКОВ | |||
| ТЕХНИЧСЕКИЕ СРЕДСТВА ДЛЯ ИССЛЕДОВАНИЙ ДНА АКВАТОРИЙ ГИДРОЛОКАЦИОННЫМИ МЕТОДАМИ | |||
| МЕЖДУНАРОДНЫЙ ЖУРНАЛ ПРИКЛАДНЫХ И ФУНДАМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ | |||
| НИЦ "АКАДЕМИЯ ЕСТЕСТВОЗНАНИЯ", МОСКВА | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| RU 38233 U1, 27.05.2004 | |||
| US 2007242134 A1, 18.10.2007. | |||

