Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) для определения модуля скорости неманеврирующей аэродинамической цели (АЦ).
Известен способ определения модуля скорости (модуля путевой скорости) АЦ, в котором сначала определяют скорости изменения горизонтальных прямоугольных координат  и
и  , а затем вычисляют модуль скорости по формуле:
, а затем вычисляют модуль скорости по формуле:  ([1], с 314). При этом скорости изменения прямоугольных координат определяют с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат ([1], с. 300-304), либо с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат ([1], с. 321-322).
([1], с 314). При этом скорости изменения прямоугольных координат определяют с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат ([1], с. 300-304), либо с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат ([1], с. 321-322).
Основным недостатком способа является низкая точность определения модуля скорости неманеврирующей АЦ, летящей с большим курсовым параметром относительно РЛС, при больших ошибках измерения азимута.
Наиболее близким аналогом (прототипом) заявляемого способа является способ определения модуля скорости АЦ по выборкам квадратов дальности. В прототипе, в отличие от других аналогов, не используются измерения азимута. Поэтому устранено влияние больших ошибок измерения азимута на точность определения модуля скорости АЦ [2, 3, 4].
Недостаток прототипа заключается в том, что ошибки определения модуля скорости прямо пропорционально зависят от дальности до цели. Поэтому при дальностях, превышающих некоторое определенное значение, преимущество прототипа по точности по сравнению с другими аналогами утрачивается.
Техническим результатом заявляемого изобретения является повышение точности определения модуля скорости неманеврирующей АЦ.
Указанный технический результат достигается тем, что в заявляемом способе, так же, как в прототипе, через одинаковые интервалы времени, равные периоду обзора РЛС, измеряют дальность АЦ и вычисляют квадраты дальности. Далее по выборке значений квадратов дальности определяют оценку второго приращения квадрата дальности. Потом вычисляют квадратный корень из этой оценки и делят полученный результат на период обзора. В итоге определяют оценку модуля скорости неманеврирующей аэродинамической цели, летящей по линейной траектории.
Согласно изобретению, в отличие от прототипа, вычисляют среднеквадратическую ошибку (СКО) модуля скорости, определяют радиальную скорость АЦ, вычисляют разность между оценкой модуля скорости и абсолютным значением радиальной скорости. Затем сравнивают эту разность с СКО. Если разность больше СКО, то потребителям выдают значение оценки модуля скорости АЦ. Если разность меньше СКО, то потребителям выдают значение радиальной скорости АЦ.
Для подтверждения реализуемости заявленного технического результата сравним значения ошибок определения модуля скорости тремя способами в различных точках траектории, проекция которой на горизонтальной плоскости (на земной поверхности) приведена в фиг. 1.
АЦ типа пассажирский самолет Боинг-777 летит на РЛС с крейсерской скоростью V=900 км/час (250 м/с). Курсовой параметр (траверзное расстояние), то есть минимальное удаление траектории от РЛС равен r0=50 км. АЦ сопровождается РЛС в «скользящем окне» длиной 20 км. Период обзора при скорости вращения антенны 6 оборотов в минуту равен Т0=10 с. Поэтому объем выборки в «скользящем окне» равен N=9. СКО измерения дальности σr=50 м, азимута σβ=1,5°. Скоростные параметры оцениваются с помощью цифрового нерекурсивного фильтра.
СКО оценивания модуля скорости способом-аналогом по фиксированным выборкам прямоугольных координат вычисляются по формуле [2, 3]:

где qcp - радиальный угол, то есть угол между векторами скорости и радиальной скорости АЦ.
Модуль скорости в прототипе определяется путем взвешенного суммирования фиксированной выборки квадратов дальности [2, 3]:

СКО оценивания модуля скорости способом-прототипом вычисляются по формуле [2, 3]:

Радиальная скорость в середине «скользящего окна» определяется путем взвешенного суммирования фиксированной выборки измерений дальности [1, С. 301]:

СКО оценивания радиальной скорости вычисляются по формуле [1, С. 308]:

Разность между оценкой модуля скорости и абсолютным значением оценки радиальной скорости, в соответствии с рисунком фиг. 1, вычисляется по формуле:

Характер изменения значений ошибок определения модуля скорости тремя способами показан на графиках фиг. 2, фиг. 3 и в таблице.
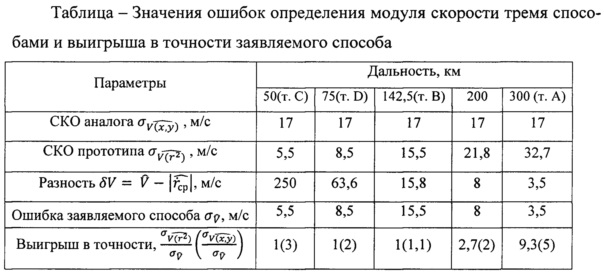
Как видно из формулы (2) и фиг. 2 зависимость между СКО оценивания скорости способом-прототипом  и дальностью линейная. СКО минимальна при нахождении АЦ на траверзе (точка С), то есть на минимальном удалении от РЛС. При дальностях больше 150 км прототип уступает аналогу по точности, то есть
и дальностью линейная. СКО минимальна при нахождении АЦ на траверзе (точка С), то есть на минимальном удалении от РЛС. При дальностях больше 150 км прототип уступает аналогу по точности, то есть  максимальна на максимальной
максимальна на максимальной
дальности обнаружении цели в точке А.
В заявляемом способе (смотри фиг. 3) ошибки определения модуля скорости минимальны на максимальной дальности обнаружении цели в точке А и при нахождении цели на траверзе (точка С). Ошибка достигает максимума в точке В, когда  становится равной разности между значением модуля скорости и абсолютным значением радиальной скорости:
становится равной разности между значением модуля скорости и абсолютным значением радиальной скорости:  . В приведенном примере максимум ошибки равен 15,5 м/с (56 км/час) в точке В, 1-й минимум - 5,5 м/с (16 км/час) на траверзе в точке С и 2-й минимум - 3,2 м/с (12 км/час) на максимальной дальности обнаружения в точке А. В итоге при использовании заявляемого способа точность оценивания модуля скорости повышается до 9 раз по сравнению с прототипом и до 5 раз по сравнению с аналогом.
. В приведенном примере максимум ошибки равен 15,5 м/с (56 км/час) в точке В, 1-й минимум - 5,5 м/с (16 км/час) на траверзе в точке С и 2-й минимум - 3,2 м/с (12 км/час) на максимальной дальности обнаружения в точке А. В итоге при использовании заявляемого способа точность оценивания модуля скорости повышается до 9 раз по сравнению с прототипом и до 5 раз по сравнению с аналогом.
Достижение положительного эффекта обусловлено тем, что с увеличением дальности уменьшается угол q между вектором скорости и вектором радиальной скорости. Как видно из фиг 1, радиальная скорость  . Сам же угол равен
. Сам же угол равен  . Поэтому на траверзе в точке С угол q=90°, радиальная скорость равна нулю, а разность δV=V=250 м/с. На дальности 300 км q=9,2°, радиальная скорость
. Поэтому на траверзе в точке С угол q=90°, радиальная скорость равна нулю, а разность δV=V=250 м/с. На дальности 300 км q=9,2°, радиальная скорость  , а разность минимальна δV=3 м/с. При больших дальностях разность δV приближается к СКО оценивания (измерения) радиальной скорости
, а разность минимальна δV=3 м/с. При больших дальностях разность δV приближается к СКО оценивания (измерения) радиальной скорости  .
.
При использовании для оценивания модуля скорости α, β, γ фильтра, а радиальной скорости -ЦНРФ, α, β фильтра и других устройств эти закономерности сохраняются.
Таким образом, заявленный технический результат, то есть повышение точности определения модуля скорости неманеврирующей АЦ, достигается за счет того, что путем взвешенного суммирования фиксированной выборки измерений дальности определяют оценку первого приращения дальности в середине «скользящего окна»  , делят эту оценку на период обзора T0 и определяют оценку радиальную скорость аэродинамической цели в середине «скользящего окна»
, делят эту оценку на период обзора T0 и определяют оценку радиальную скорость аэродинамической цели в середине «скользящего окна»  вычисляют разность между полученной оценкой абсолютного значения радиальной скорости
вычисляют разность между полученной оценкой абсолютного значения радиальной скорости  и оценкой модуля скорости, определяемой так же, как в прототипе, сравнивают эту разность с СКО оценивания модуля скорости по выборке квадратов дальности и по результатам этого сравнения потребителям выдают значение модуля скорости неманеврирующей АЦ по следующему правилу: если разность больше СКО, то потребителям выдают значение оценки модуля скорости, определяемой, как в прототипе, а если разность меньше СКО, то потребителям выдают значение модуля скорости неманеврирующей аэродинамической цели, равное оценке ее радиальной скорости.
и оценкой модуля скорости, определяемой так же, как в прототипе, сравнивают эту разность с СКО оценивания модуля скорости по выборке квадратов дальности и по результатам этого сравнения потребителям выдают значение модуля скорости неманеврирующей АЦ по следующему правилу: если разность больше СКО, то потребителям выдают значение оценки модуля скорости, определяемой, как в прототипе, а если разность меньше СКО, то потребителям выдают значение модуля скорости неманеврирующей аэродинамической цели, равное оценке ее радиальной скорости.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М: «Советское радио», 1967, 400 с.
2. Патент на изобретение №2559296 Российская Федерация, МПК G01S 13/58. Способ определения модуля скорости аэродинамической цели / Белоногов П.З., Шустов Э.И., Бомштейн А.Д., Стучилин А.И., Белоус Р.А., Скоков А.Л, Сизов Ю.Г, Алексеев Д.Ю; заявитель и патентообладатель ФГБУ «3 ЦНИИ» Минобороны России. - №2012147931; заявл. 12.11.12; опубл. 10.08.15, Бюл. №22.
3. Патент на полезную модель №152617 Российская Федерация, МПК G01S 13/58. Устройство радиолокационного определения путевой-скорости неманеврирующей аэродинамической цели / Белоногов П.З., Бомштейн А.Д., Фитасов Е.С., Белоус Р.А., Алексеев Д.Ю., Максаков А.Г., Ильясафов А.Д., Демидчик Ю.П.; заявитель и патентообладатель ФГБУ «3 ЦНИИ» Минобороны России. - №2014140144; заявл. 03.10.14; опубл. 18.05.15.
4. Патент на полезную модель №158491 Российская Федерация, МПК G01S 13/58. Радиолокационный измеритель путевой скорости неманеврирующей аэродинамической цели по выборке квадратов дальности / Белоногов П.З., Бомштейн А.Д., Фитасов Е.С., Белоус Р.А., Алексеев Д.Ю., Максаков А.Г., Стучилин А.И.; заявитель и патентообладатель ФГБУ «3 ЦНИИ» Минобороны России. - №2015127290; заявл. 07.07.15; опубл. 10.01.16.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство определения путевой скорости неманеврирующего объекта по выборке произведений дальности на радиальную скорость | 2019 |
|
RU2741400C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ВЫБОРОК КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2753615C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ | 2021 |
|
RU2782527C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2012 |
|
RU2559296C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2626015C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ | 2012 |
|
RU2510861C1 |
Изобретение относится к радиолокации и может быть использовано для определения модуля скорости неманеврирующей аэродинамической цели (АЦ) преимущественно в РЛС с грубыми измерениями азимута. Достигаемый технический результат - повышение точности определения модуля скорости. Указанный результат достигается за счет того, что по выборке квадратов дальности оценивают модуль скорости, вычисляют среднеквадратическую ошибку (СКО) модуля скорости, определяют радиальную скорость АЦ, вычисляют разность между оценкой модуля скорости и абсолютным значением радиальной скорости, сравнивают эту разность с СКО, если разность больше СКО, то потребителям выдают значение оценки модуля скорости, если разность меньше СКО, то потребителям выдают значение радиальной скорости аэродинамической цели. 3 ил., табл. 1.
Способ определения модуля скорости неманеврирующей аэродинамической цели по выборкам измерений дальности, заключающийся в том, что через одинаковые интервалы времени, равные периоду обзора РЛС, измеряют дальность аэродинамической цели, вычисляют квадраты дальности, определяют оценку второго приращения квадрата дальности по выборке значений квадратов дальности, вычисляют квадратный корень из этой оценки, делят полученный результат на период обзора и на основании выборки квадратов дальности определяют оценку модуля скорости неманеврирующей аэродинамической цели, летящей по линейной траектории, вычисляют среднеквадратическую ошибку (СКО) оценивания модуля скорости, определяют оценку радиальной скорости аэродинамической цели путем взвешенного суммирования фиксированной выборки измерений дальности, отличающийся тем, что вычисляют разность между оценкой модуля скорости и абсолютным значением оценки радиальной скорости, сравнивают эту разность с СКО оценивания модуля скорости, если разность больше СКО, то потребителям выдают значение оценки модуля скорости, а если разность меньше СКО оценивания модуля скорости, то потребителям выдают значение оценки радиальной скорости аэродинамической цели.
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2012 |
|
RU2559296C2 |
| ОБНАРУЖИТЕЛЬ МАНЕВРА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2615783C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА | 2015 |
|
RU2607358C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |
| US 8427359 B1, 23.04.2013 | |||
| EP 7784470 A1, 11.06.1997 | |||
| EP 1925948 A1, 28.05.2008. | |||

