Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) для определения путевой скорости (модуля вектора путевой скорости) неманеврирующих объектов, в частности, воздушных и надводных целей (ВЦ и НЦ), движущихся по линейной траектории.
Известны способы и устройства измерения путевой скорости, в которых сначала определяют оценки скорости изменения прямоугольных декартовых координат  а затем вычисляют оценку путевой скорости по формуле:
а затем вычисляют оценку путевой скорости по формуле:  [1, С 314].
[1, С 314].
Известны устройства определения скорости изменения прямоугольных декартовых координат  с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат [1, С. 300-304].
с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки значений этих координат [1, С. 300-304].
Известны устройства определения скорости изменения прямоугольных декартовых координат  с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат [1, С. 321-322].
с помощью α, β фильтра путем последовательного оптимального сглаживания выборки нарастающего объема значений этих координат [1, С. 321-322].
Основным недостатком этих устройств является низкая точность определения путевой скорости неманеврирующих объектов в РЛС с большими ошибками измерения азимута, в частности в РЛС метрового и декаметрового диапазонов волн.
Известен способ и устройства определения путевой скорости неманеврирующих объектов по фиксированной выборке значений квадратов дальности с помощью ЦНРФ [2, 3, 4]. Сущность способа заключается в том, что перемножают входные сигналы и получают квадраты дальности, в ЦНРФ формируют фиксированную выборку значений квадратов дальности, определяют оценку второго приращения квадрата дальности  за период обзора РЛС, вычисляют квадратный корень из этой оценки и делят полученный результат на период обзора Т0.
за период обзора РЛС, вычисляют квадратный корень из этой оценки и делят полученный результат на период обзора Т0.
Известно устройство определения путевой скорости неманеврирующих объектов, в котором оценку второго приращения квадрата дальности  определяют с помощью α, β, γ фильтра [5].
определяют с помощью α, β, γ фильтра [5].
Достоинство способа и устройств: повышение точности определения путевой скорости неманеврирующих объектов за счет исключения влияния больших ошибок измерения азимута и угла места.
Основной недостаток способа и устройств: высокие требования к точности измерения дальности, ошибки измерения которой не должны превышать 20…30 метров. Такие точности проблематично или невозможно реализовать в РЛС метрового и декаметрового диапазонов с узкополосными зондирующими сигналами и малой полосой пропускания приемного устройства.
Наиболее близким аналогом (прототипом) заявленного изобретения являются способ и устройство определения путевой скорости неманеврирующих объектов по фиксированной выборке значений произведений дальности на радиальную скорость [6].
В этом способе-прототипе в качестве входных сигналов используют данные измерений дальности ri и радиальной скорости  , которые перемножают и получают произведения дальности на радиальную скорость
, которые перемножают и получают произведения дальности на радиальную скорость  . Далее в ЦНРФ формируют фиксированную выборку этих произведений. По этой фиксированной выборке вычисляют оценку первого приращения
. Далее в ЦНРФ формируют фиксированную выборку этих произведений. По этой фиксированной выборке вычисляют оценку первого приращения  путем оптимального взвешенного суммирования N значений произведений дальности на радиальную скорость:
путем оптимального взвешенного суммирования N значений произведений дальности на радиальную скорость:

Затем делят полученную оценку на период обзора Т0, вычисляют квадратный корень и получают значение оценки путевой скорости:

Устройство-прототип, как показано в фиг. 1, содержит последовательно соединенные умножитель входных сигналов дальности и радиальной скорости, цифровой нерекурсивный фильтр оценивания первого приращения произведения дальности на радиальную скорость, делитель на период обзора РЛС и вычислитель квадратного корня, выход которого является выходом устройства-прототипа.
Достоинство прототипа: устранено влияние больших ошибок измерения азимута и угла места и существенно уменьшено влияние ошибок измерения дальности σr на точность определения путевой скорости, то есть на значение ее среднеквадратической ошибки (СКО)  , особенно при движении объекта с параметром относительно РЛС.
, особенно при движении объекта с параметром относительно РЛС.
Например, СКО путевой скорости самолета  вычисленная по формуле [6],
вычисленная по формуле [6],
в РЛС метрового диапазона «Резонанс» (СКО измерения радиальной скорости  , дальности σr = 300 м, азимута σβ = 1,5° [7, С. 356-361]) на дальности r = 175 км при N = 13 измерениях координат с темпом T0 = 5 с и радиальном курсе, то есть при нулевом курсовом параметре, будет равна
, дальности σr = 300 м, азимута σβ = 1,5° [7, С. 356-361]) на дальности r = 175 км при N = 13 измерениях координат с темпом T0 = 5 с и радиальном курсе, то есть при нулевом курсовом параметре, будет равна  . При увеличении СКО измерения дальности в 5 раз, то есть до σr = 1500 м, точность измерения путевой скорости снизится только на 70%, то есть до
. При увеличении СКО измерения дальности в 5 раз, то есть до σr = 1500 м, точность измерения путевой скорости снизится только на 70%, то есть до  , что важно для РЛС декаметрового диапазона. В РЛС
, что важно для РЛС декаметрового диапазона. В РЛС
«Резонанс» использовать способ определения скорости по выборке квадратов дальности невозможно, так как СКО становятся соизмеримыми со значением путевой скорости. При определении скорости по выборкам прямоугольных координат СКО оценки скорости увеличивается в три раза.
Недостаток прототипа: ошибки измерения скорости зависят прямо пропорционально от дальности до объекта. В приведенном примере при увеличении дальности вдвое, (со 175 км до 350 км) СКО σV также увеличится в два раза, то есть с  .
.
Техническим результатом заявленного изобретения является повышение точности определения путевой скорости неманеврирующих объектов на дальностях, превышающих в несколько раз значение курсового параметра.
Указанный технический результат достигается тем, что в заявленном способе, как в прототипе, используют данные измерений дальности ri и радиальной скорости  , которые перемножают и получают произведения дальности на радиальную скорость, далее в ЦНРФ формируют фиксированную выборку этих произведений. По этой фиксированной выборке вычисляют оценку первого приращения
, которые перемножают и получают произведения дальности на радиальную скорость, далее в ЦНРФ формируют фиксированную выборку этих произведений. По этой фиксированной выборке вычисляют оценку первого приращения  путем оптимального взвешенного суммирования N значений произведений дальности на радиальную скорость. Затем делят полученную оценку на период обзора Т0, вычисляют квадратный корень и получают оценку путевой скорости
путем оптимального взвешенного суммирования N значений произведений дальности на радиальную скорость. Затем делят полученную оценку на период обзора Т0, вычисляют квадратный корень и получают оценку путевой скорости  .
.
В отличие от прототипа, согласно изобретению, в каждом i -м обзоре вычисляют пороговую дальность  , на которой разность между путевой скоростью и измеренной в реальном времени радиальной скоростью
, на которой разность между путевой скоростью и измеренной в реальном времени радиальной скоростью  равна СКО
равна СКО  , по формуле
, по формуле  Далее сравнивают полученное значение пороговой дальности
Далее сравнивают полученное значение пороговой дальности  с измеренным в реальном времени значением дальности до цели ri.
с измеренным в реальном времени значением дальности до цели ri.
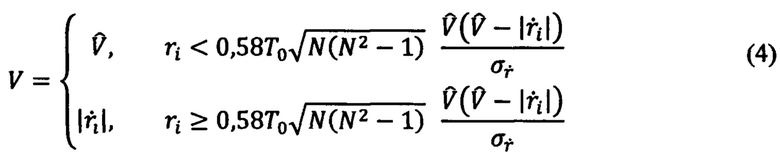
Если измеренная в реальном времени дальность ri меньше пороговой  , то потребителям выдают оценку путевой скорости
, то потребителям выдают оценку путевой скорости  Если измеренная в реальном времени дальность ri больше пороговой
Если измеренная в реальном времени дальность ri больше пороговой  , то потребителям выдают измеренное абсолютное значение радиальной скорости
, то потребителям выдают измеренное абсолютное значение радиальной скорости  вместо оценки
вместо оценки  путевой скорости. В итоге измеритель путевой скорости работает по следующему алгоритму:
путевой скорости. В итоге измеритель путевой скорости работает по следующему алгоритму:
Заявленное устройство, структурная схема которого приведена в фиг. 2, как и прототип, содержит последовательно соединенные умножитель входных сигналов дальности и радиальной скорости (блок 1), цифровой нерекурсивный фильтр оценивания первого приращения произведения дальности на радиальную скорость (блок 2), делитель на период обзора РЛС (блок 3) и вычислитель квадратного корня (блок 4).
В отличие от прототипа, согласно изобретению, выход блока 4 соединен с первыми входами дополнительно введенных переключателя (блок 5) и вычислителя пороговой дальности (блок 6), второй вход которого соединен со вторым входом блока 1, а выход подключен к второму входу дополнительно введенного порогового устройства (блок 7), первый вход которого соединен с первым входом блока 1, а первый и второй выходы подключены к третьему и четвертому входам переключателя, второй вход которого соединен со вторым входом блока 1, а выход является выходом заявленного устройства.
Как доказательство возможности реализации заявленного технического результата, в таблице 1 приведены результаты сравнения точности заявленного способа, прототипа и аналога при дальностях до цели от 50 до 350 км для случая, когда самолет летит с курсовым параметром, равным 50 км (смотри фиг. 3). СКО измерения радиальной скорости  , дальности σr = 300 м, азимута σβ = 1,5°. Самолет сопровождается в скользящем окне, длительность которого равна 60 секунд. В каждом обзоре РЛС вычисляют пороговую дальность. По результатам сравнения значений измеренной и пороговой дальности на выход выдают либо оценку путевой скорости, либо измеренное в реальном времени абсолютное значение радиальной скорости.
, дальности σr = 300 м, азимута σβ = 1,5°. Самолет сопровождается в скользящем окне, длительность которого равна 60 секунд. В каждом обзоре РЛС вычисляют пороговую дальность. По результатам сравнения значений измеренной и пороговой дальности на выход выдают либо оценку путевой скорости, либо измеренное в реальном времени абсолютное значение радиальной скорости.
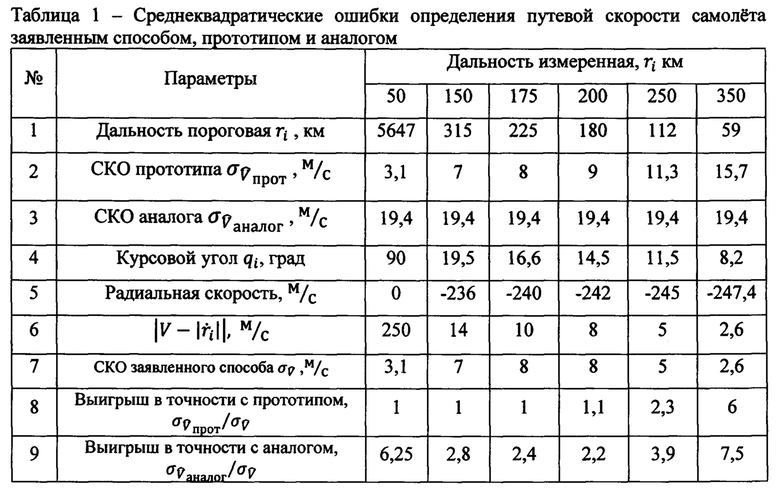
Как видно из таблицы, на дальности около 200 км разность между путевой и радиальной скоростью и СКО оценивания путевой скорости  в прототипе практически одинаковы, как в точке В фиг. 3. На дальности 350 км точность оценивания путевой скорости заявленным способом становится в 6 и 7,5 раз больше точности прототипа и аналога.
в прототипе практически одинаковы, как в точке В фиг. 3. На дальности 350 км точность оценивания путевой скорости заявленным способом становится в 6 и 7,5 раз больше точности прототипа и аналога.
Измеренная дальность 150 км вдвое меньше пороговой дальности. Курсовой угол qi ≈ 20°, то есть угол между векторами путевой и радиальной скоростью. Поэтому разность между путевой и радиальной скоростью вдвое больше СКО оценивания путевой скорости в прототипе, как в точке А фиг. 3.
Характер изменения значений СКО оценок путевой скорости в прототипе, аналоге и разности между путевой и радиальной скоростью самолета на траектории его полета показан также на графиках фиг. 4. Как видно из графиков, ошибки определения путевой скорости заявленным способом достигают максимума на дальности 200 км. Далее разность между путевой и модулем радиальной скорости становится меньше СКО оценивания путевой скорости в прототипе и в аналоге.
На дальностях, меньших 160 км, наоборот, резко возрастает разность между путевой и радиальной скоростью, поэтому потребителям выдают значение оценки путевой скорости.
Таким образом, за счет введения вычислителя пороговой дальности в состав заявляемого устройства и выдачи потребителям значения радиальной скорости вместо оценки путевой скорости, если измеренная дальность до цели становится больше пороговой, достигнут заявленный технический результат: повышена точность определения путевой скорости неманеврирующих объектов на дальностях, превышающих значение курсового параметра в 3-4 раза.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: «Советское радио», 1967, 400 с.
2. Патент на полезную модель №152617 «Устройство радиолокационного определения путевой скорости неманеврирующей воздушной цели».
3. Патент на изобретение №2559296 «Способ определения модуля скорости аэродинамической цели»
4. Патент на изобретение №2669773 «Способ определения скорости неманеврирующей аэродинамической цели по выборке измерений дальности»
5. Патент на полезную модель №158491 «Радиолокационный измеритель путевой скорости неманеврирующей аэродинамической цели по выборке квадратов дальности»
6. Патент на изобретение №2644588 «Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость»
7. Вооружение ПВО и РЭС России. Альманах. М.: Издательство НО «Лига содействия оборонным предприятиям», 2011, 504 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ | 2021 |
|
RU2782527C1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ ПО ВЫБОРКАМ ИЗМЕРЕНИЙ ДАЛЬНОСТИ | 2017 |
|
RU2669773C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ ЕЕ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2797227C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2796965C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
Изобретение относится к радиолокации и может быть использовано для определения путевой скорости неманеврирующих объектов преимущественно в радиолокационных станциях (РЛС) с грубыми измерениями угловых координат. Достигаемый технический результат изобретения - повышение точности определения путевой скорости. Для этого в цифровом нерекурсивном фильтре (ЦНРФ) оценивают первое приращение произведения дальности на радиальную скорость, делят эту оценку на период обзора РЛС Т0, из полученного результата вычисляют квадратный корень и получают оценку путевой скорости  В каждом обзоре вычисляют пороговую дальность
В каждом обзоре вычисляют пороговую дальность  , где N - количество измерений координат,
, где N - количество измерений координат,  - среднеквадратическая ошибка (СКО) измерения радиальной скорости, на которой разность между оценкой
- среднеквадратическая ошибка (СКО) измерения радиальной скорости, на которой разность между оценкой  и измеренным модулем радиальной скорости
и измеренным модулем радиальной скорости  равна СКО оценки путевой скорости
равна СКО оценки путевой скорости  . Если измеренная дальность ri больше пороговой, потребителям выдают значение радиальной скорости
. Если измеренная дальность ri больше пороговой, потребителям выдают значение радиальной скорости  вместо оценки путевой скорости
вместо оценки путевой скорости  , определяемой с большей ошибкой. Измеритель путевой скорости содержит умножитель дальности на радиальную скорость, ЦНРФ, делитель на период обзора, вычислители квадратного корня и пороговой дальности, пороговое устройство и переключатель с соответствующими связями. 2 н.п. ф-лы, 4 ил., 1 табл.
, определяемой с большей ошибкой. Измеритель путевой скорости содержит умножитель дальности на радиальную скорость, ЦНРФ, делитель на период обзора, вычислители квадратного корня и пороговой дальности, пороговое устройство и переключатель с соответствующими связями. 2 н.п. ф-лы, 4 ил., 1 табл.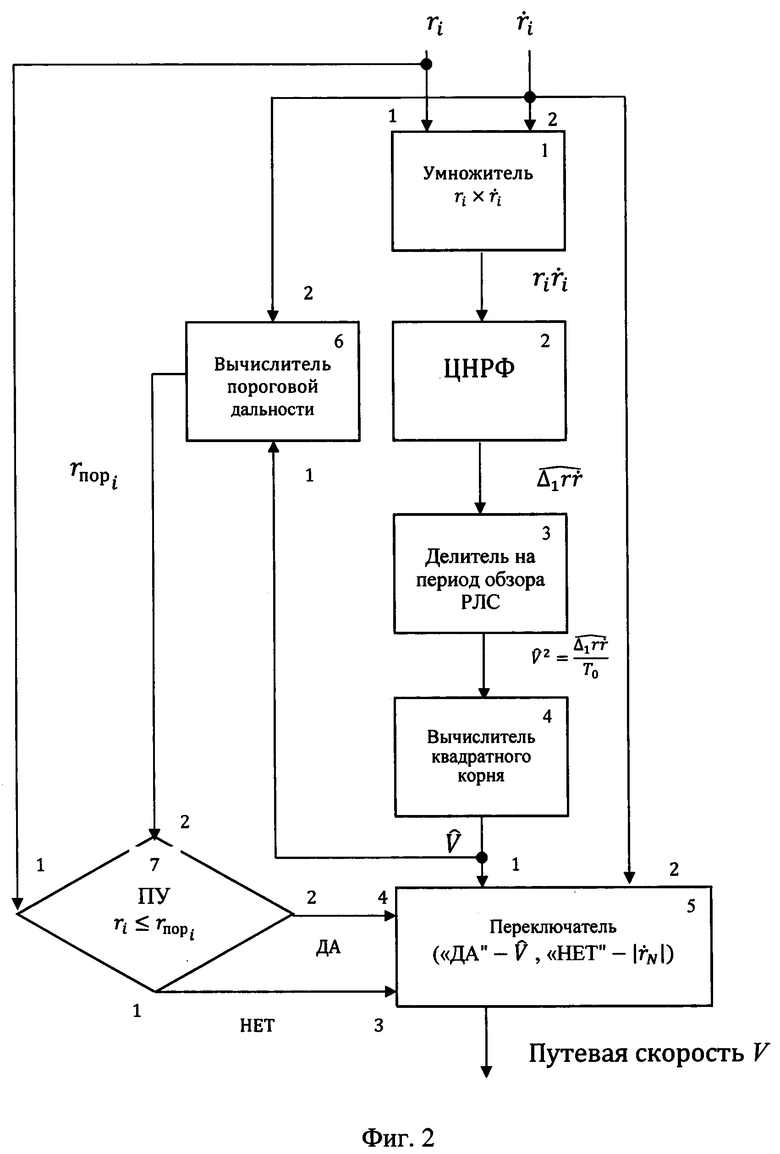
1. Способ определения путевой скорости неманеврирующего объекта по выборке произведений дальности на радиальную скорость, включающий перемножение результатов измерений дальности ri и радиальной скорости  , формирование фиксированной выборки из N значений полученных произведений
, формирование фиксированной выборки из N значений полученных произведений  , определение по этой фиксированной выборке оценки первого приращения произведения дальности на радиальную скорость
, определение по этой фиксированной выборке оценки первого приращения произведения дальности на радиальную скорость  , деление полученной оценки на период обзора РЛС Т0, вычисление квадратного корня из полученного результата и получение в итоге оценки путевой скорости неманеврирующего объекта
, деление полученной оценки на период обзора РЛС Т0, вычисление квадратного корня из полученного результата и получение в итоге оценки путевой скорости неманеврирующего объекта  отличающийся тем, что в каждом i-м обзоре вычисляют пороговую дальность, на которой разность между путевой скоростью и измеренным в реальном времени абсолютным значением радиальной скорости
отличающийся тем, что в каждом i-м обзоре вычисляют пороговую дальность, на которой разность между путевой скоростью и измеренным в реальном времени абсолютным значением радиальной скорости  не превышает среднеквадратическую ошибку (СКО) оценки путевой скорости
не превышает среднеквадратическую ошибку (СКО) оценки путевой скорости  , по формуле
, по формуле

где  - СКО измерения радиальной скорости, сравнивают полученное значение пороговой дальности
- СКО измерения радиальной скорости, сравнивают полученное значение пороговой дальности  с измеренным в реальном времени значением дальности до цели ri, если дальность ri меньше пороговой
с измеренным в реальном времени значением дальности до цели ri, если дальность ri меньше пороговой  , то потребителям выдают оценку путевой скорости
, то потребителям выдают оценку путевой скорости  если дальность ri больше пороговой
если дальность ri больше пороговой  , то потребителям выдают измеренное абсолютное значение радиальной скорости
, то потребителям выдают измеренное абсолютное значение радиальной скорости  вместо оценки путевой скорости
вместо оценки путевой скорости  , определяемой с большей ошибкой.
, определяемой с большей ошибкой.
2. Устройство определения путевой скорости неманеврирующего объекта по выборке произведений дальности на радиальную скорость, содержащее последовательно соединенные умножитель входных сигналов дальности и радиальной скорости, цифровой нерекурсивный фильтр оценивания первого приращения произведения дальности на радиальную скорость, делитель на период обзора РЛС и вычислитель квадратного корня, отличающееся тем, что выход вычислителя квадратного корня соединен с первыми входами дополнительно введенных переключателя и вычислителя пороговой дальности, второй вход которого соединен со вторым входом умножителя входных сигналов дальности и радиальной скорости, а выход подключен ко второму входу дополнительно введенного порогового устройства, первый вход которого соединен с первым входом умножителя входных сигналов дальности и радиальной скорости, а первый и второй выходы подключены к третьему и четвертому входам переключателя, второй вход которого соединен со вторым входом умножителя входных сигналов дальности и радиальной скорости, а выход является выходом заявленного устройства.
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| 0 |
|
SU152617A1 | |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ ПО ВЫБОРКАМ ИЗМЕРЕНИЙ ДАЛЬНОСТИ | 2017 |
|
RU2669773C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2273033C2 |
| 0 |
|
SU158491A1 | |
| US 2019025336 A1, 24.01.2019 | |||
| СПОСОБ ЗАЩИТЫ ПОВЕРХНОСТИ ПЛОДОВ | 2003 |
|
RU2244405C2 |
| JP 4871104 B2, 08.02.2012 | |||
| US 8427359 B1, 23.04.2013. | |||

