ОС
ос
IC
4;
1
Изобретение относится к сельскому хозяйству и может использоваться для группового управления двумя и более машинно-тракторными агрегатами (МТА) одним трактористом.
Целью изобретения является повышение точности автоматического вождения ведомого агрегата.
На фиг.1 приведены геометрические построения, поясняющие способ дублер- ного вождения на гоне; на фиг.2 - траектория ведущего и ведомого агрегатов при выходе с рабочего гона на поворотную полосу; на фиг.З - структурная схема устройства дублерного вождения машинно-тракторных агрегатов .
На фиг.1 обозначено: О - место ведущего агрегата; OV - направление дви движения агрегатов. А,, А - возможные местоположения ведомого агрегата относительно ведущего, г - межагрегатное расстояние, d - дистанция между агрегатами, b - боковое смещение ведомого агрегата (А )относительно продольной оси (ОВ) ведущего агрегата (0), Ь b - погрешность вождения ведомого агрегата известным способом
По способу дублерного вождения на рабочем гоне предварительно осуществляют автономное вождение одного из агрегатов, например ведомого, вдоль прямой А,- С параллельной продольной оси второго агрегата и отстоящей от нее на требуемом боковом смещении, в процессе которого измеряют боковое смещение агрегатов и запоминают его мгновенные значения в функции дистанции между агрегатами, например через 0,1 м. В процессе дублерного вождения воспроизводят эти предварительно запомненные мгновенные значения бокового смещения также в функции дистанции d и используют их для фо1р- мирования сигнала тракторного рассогласования как разности между изме- ряемьм Ь( и воспроизводимым Ь„ значениями бокового смещения
е Ь, - Ь. (1)
Такое формирование сигнала траек- торного рассогласования устраняет влияние систематической погрешности измерения бокового смещения Ь, в том числе вызьтаемого изменением дистанции d, на.точность автоматического вождения ведомого агрегата.
Действительно, пусть боковое смещение агрегатов определяется, на13824172
пример, непосредственно по межагрегатному расстоянию г, т.е. пусть измеряют не боковое смещение, а меж- с агрегатное расстояние. Тогда в процессе предварительного вождения ведомого агрегата вдоль прямой Af С измеряемые и запоминаемые значения межагрегатного расстояния изменяются 10 в соответствии с зависимостью
г - -Ib -t- di ., (2) Эта зависимость сохранится и при дублерном вождении, поэтому сигнал траекторного рассогласования , формируемый в соответствии с (1), равен нулю только в том случае, когда ведомый агрегат находится на прямой А,С, т.е. движется с боковым смещением, равным требуемому. Следовательно, несмотря на низкую точность измерения бокового смещения (измеряется не боковое смещение, а межагрегатное расстояние), способ обеспечивает высокую точность вождения ведомого агрегата на гоне (по прямолинейным траекториям). I
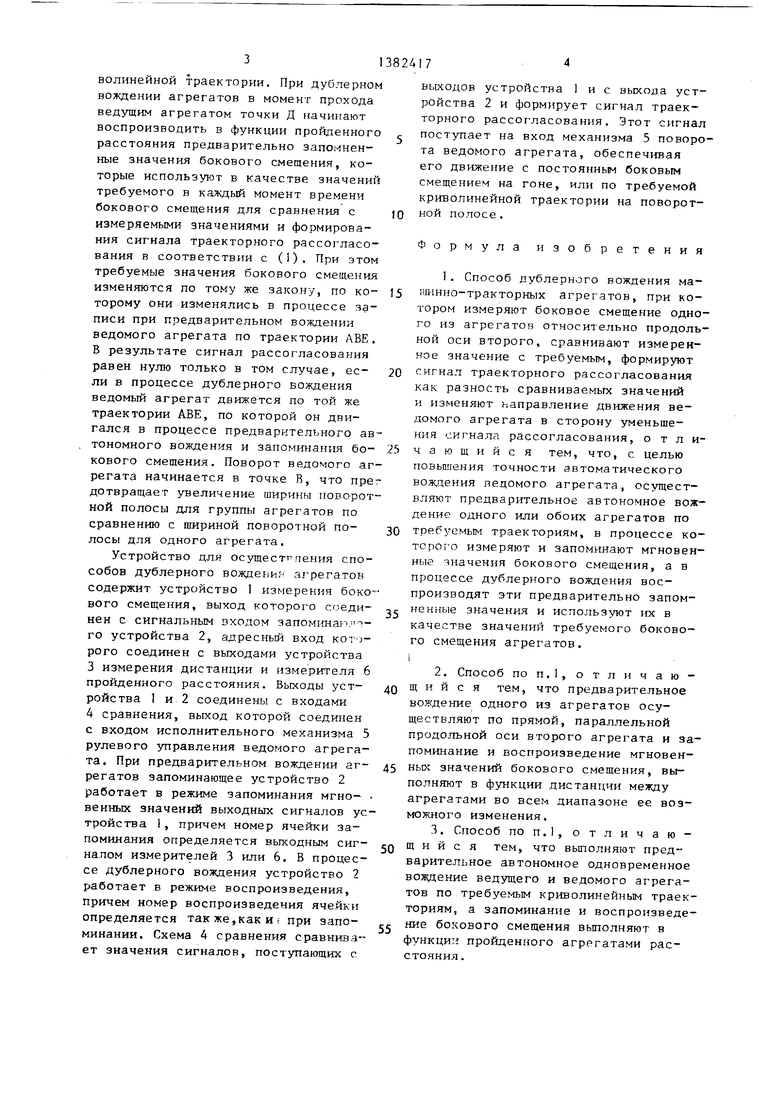
На фиг.2 обозначено: БМ - начало поворотной полосы, CDE - фактическая
0 траектория ведущего агрегата при выходе с рабочего гона на поворотную полосу, ABE - требуемая траектория ведомого агрегата, АВ - дистанция между агрегатами, BD - боковое смеg щение ведущего агрегата относительно продольной оси ведомого.
По способу дублерного вождения по криволинейным траекториям осуществляют предварительное автономное вож0 дение ведущего агрегата по траектории CDE, а ведомого - по траектории ABE, в процессе которого дистанцию поддерживают постоянной. В процессе этого вождения измеряют боковое сме5 щение агрегатов и запоминают его мгновенные значения в функции пройденного агрегатами расстояния, например через О,1 м. Если измеряют боковое смещение ведущего агрегата
0 относительно продольной оси ведомого, измеряемые значения бокового смещения возрастают, пока ведомый агрегат движется на участке АВ, а затем, когда ведомый агрегат движется на участ5 ке BE, уменьшаются до нуля. Запоминание мгновенных значений бокового смещения осуществляют, начиная с местоположения ведущего агрегата в точке Д и продолжают до окончания криволинейной траектории. При дублерном вождении агрегатов в момент прохода ведущим агрегатом точки Д начинают воспроизводить в функции пройденного расстояния предварительно запомненные значения бокового смещения, которые используют в качестве значений требуемого в каждый момент времени бокового смещения для сравнения с измеряемыми значениями и формирования сигнала траекторного рассогласования в соответствии с (1). При этом требуемые значения бокового смещения изменяются по тому же закону, по которому они изменялись в процессе записи при предварительном вождении ведомого агрегата по траектории ABE, В результате сигнал рассогласования равен нулю только в том случае, если в процессе дублерного вождения ведомый агрегат движется по той же траектории ABE, по которой он двигался в процессе предварител ного автономного вождения и запоминания бокового смешения. Поворот ведомого агрегата начинается в точке В, что пре дотвращает увеличение ширины поворотной полосы для группы агрегатов по сравнению с шириной поворотной полосы для одного агрегата.
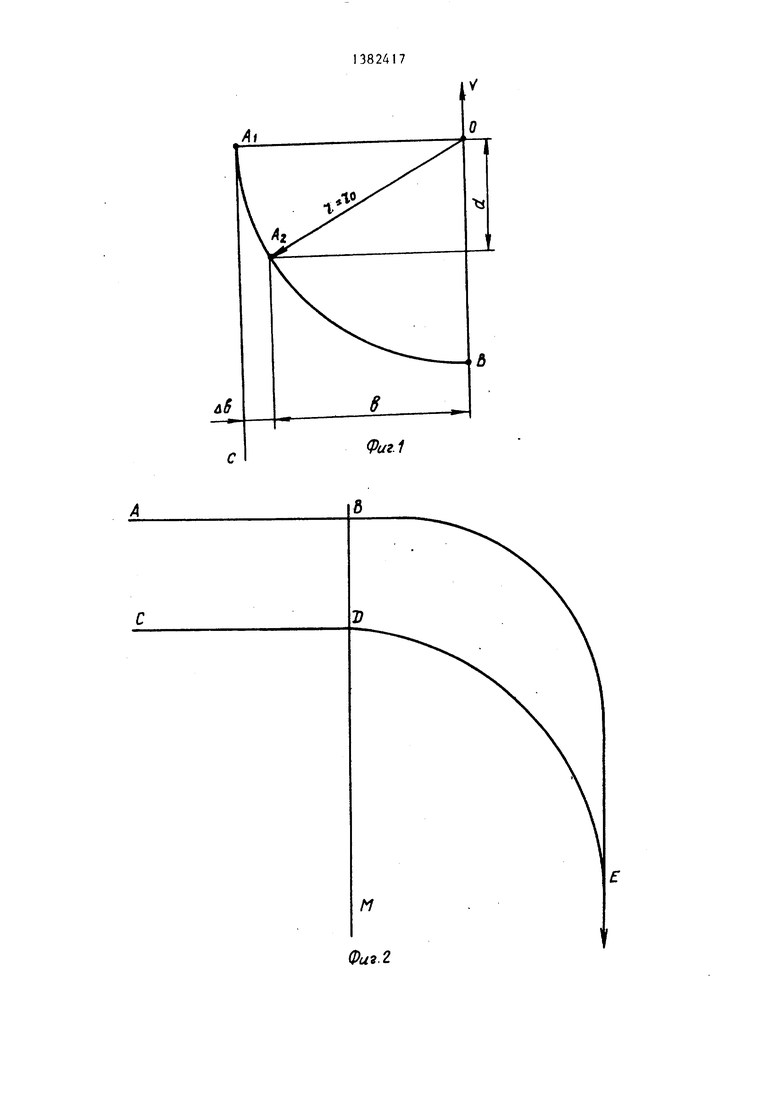
Устройство для осуществления способов дублерного вождер1ии ах регатов содержит устройство I измерения бокового смещения, выход которого соединен с сигнальным входом запом1шаю,1- го устройства 2, адресный вход которого соединен с выходами устройства
3измерения дистанции и измерителя 6 пройденного расстояния. Выходы устройства 1 и 2 соединены с входами
4сравнения, выход которой соединен с входом исполнительного механизма 5 рулевого управления ведомого агрегата. При предварительном вождении агрегатов запоминающее устройство 2 работает в режиме запоминания мгно- венных значений выходных сигналов устройства 1, причем номер ячейки запоминания определяется выходным сигналом измерителей 3 или 6, В процессе дублерного вождения устройство 2 работает в режиме воспроизведения, причем номер воспроизведения ячейки определяется так же,как и; при запоминании. Схема 4 сравнения сравнивает значения сигналов, поступающих с
выходов устройства 1 и с выхода устройства 2 и формирует сигнал траекторного рассогласования. Этот сигнал поступает на вход механизма 5 поворота ведомого агрегата, обеспечивая его движение с постоянным боковым смещением на гоне, или по требуемой криволинейной траектории на поворот- ной полосе.
Формула изобретения
1,Способ дублерного вождения ма- 1чинно-тракторных агрегатов, при котором измеряют боковое смещение одного из агрегатов относительно продольной оси второго, сравнивают измеренное значение с требуемым, формируют
сигнал траекторного рассогласования как разность сравниваемых значений и изменяют направление движения ведомого агрегата в сторону уменьшения сигнала рассогласования, о т л ичающийся тем, что, с целью повьппения точности автоматического вож,дения ведомого агрегата, осуществляют предварительное автономное вождение одного или обоих агрегатов по
требуемым траекториям, в процессе которого измеряют и запоминают мгновенные значения бокового смещения, а в процессе дублерного вождения воспроизводят эти предварительно запомненные значения и используют их в качестве значений требуемого бокового смещения агрегатов, I
2,Способ поп,1,отличаю- щ и и с я тем, что предварительное
вождение одного из агрегатов осуществляют по прямой, параллельной продольной оси второго агрегата и запоминание и воспроизведение мгновен- ных значений бокового смещения, выполняют в функции дистанции между агрегатами во всем диапазоне ее возможного изменения,
3,Способ поп,1, отличаю- щ и и с я тем, что вьшолняют предварительное автономное одновременное вождение ведущего и ведомого агрегатов по требуемым криволинейным траекториям, а запоминание и воспроизведение бокового смещения выполняют в
функции пройденного агрегатами расстояния .
Фиг.1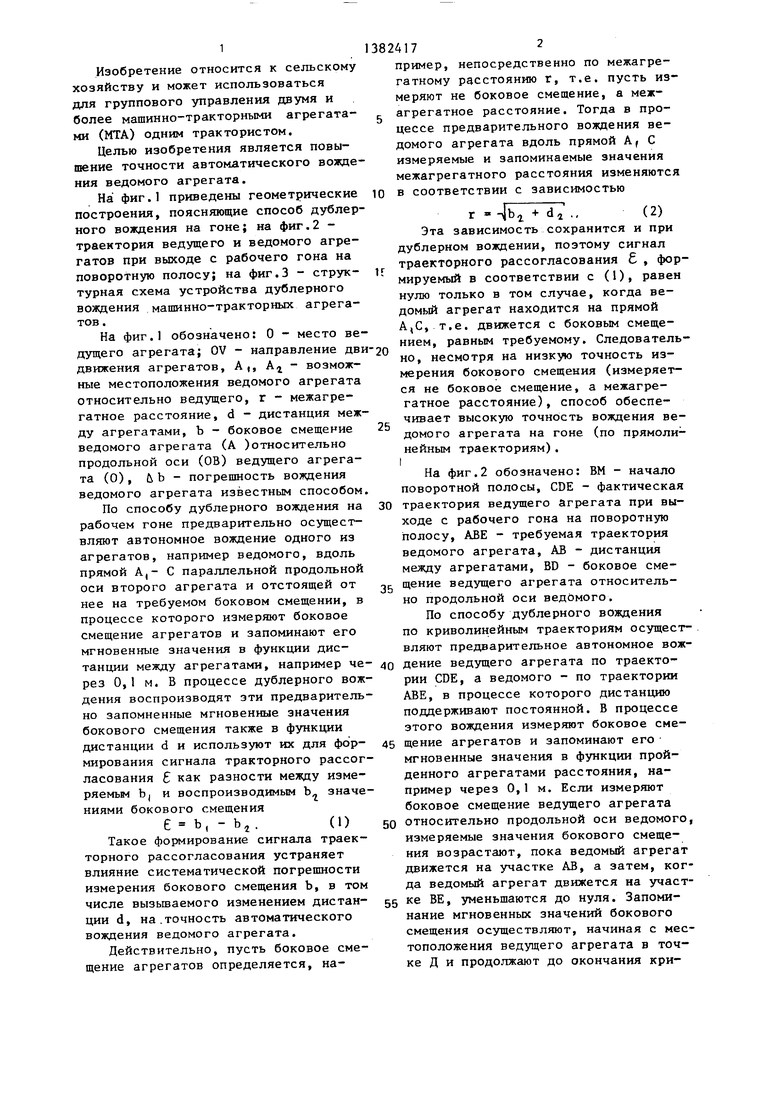
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Индукционная система дублерного вождения машинно-тракторных агрегатов | 1984 |
|
SU1246911A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| ИНДУКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАХОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670490C1 |
| Электроиндукционная система местоопределения самоходных машин | 2024 |
|
RU2831279C1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
Изобретение относится к сельскому хозяйству и может быть использовано при групповом управлении двумя и более машинно-тракторными агрегатами (МТА) одним трактористом.Цель изобретения - повышение точности автоматического вождения на рабочем гоне и по криволинейным траекториям. Предварительно осуществляют автономное вождение ведущего и ведомого МТА по требуемым траекториям. Измеряют и запоминают мгновенные значеп ния бокового смещения МТА в функции дистанции между агрегатами при вождении агрегатов на гоне и в функции пройденного МТА расстояния при вождении по криволинейным траекториям. В процессе дублерного вождения воспроизводят запомненные значения и используют их в качестве значений требуемого бокового смещения МТА. Результирующий сигнал рассогласования в процессе вождения равен нулю при дублерном вождении на гоне, если ведомый агрегат отстоит от продольной оси ведущего агрегата на постоянном требуемом расстоянии и равен нулю, если ведомые МТА двигаются по той же траектории, по которой двигались в процессе предварительного вождения и запоминания бокового смещения при вождении по криволинейньм траекториям. 2 з.п. ф-лы, 3 ил. с (Л с
И
Фиъ.г
Фиг.З
| Гельфенбейн С.П | |||
| Терранавига- ция | |||
| -М.: Колос, 1981, с.168-171. |
