ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Данная заявка испрашивает приоритет заявки на патент КНР №201410563491.0, озаглавленной "INDOOR TRACK TYPE INTELLIGENT INSPECTION ROBOT SYSTEM" ("ИНТЕЛЛЕКТУАЛЬНАЯ ИНСПЕКЦИОННАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА НА НАПРАВЛЯЮЩЕЙ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ РАБОТЫ В ПОМЕЩЕНИИ") и поданной в Государственное ведомство интеллектуальной собственности КНР 21 октября 2014 года, полное раскрытие которой включено сюда путем ссылки.
Область техники, к которой относится изобретение
[0002] Настоящая заявка относится к интеллектуальной инспекционной робототехнической системе на направляющей, предназначенной для работы в помещении.
Уровень техники
[0003] Нормальное функционирование силового оборудования, предназначенного для работы в помещении, имеет жизненно важное значение. В одном аспекте требуется, чтобы силовое оборудование, предназначенное для работы в помещении, имело достаточную надежность, и в другом аспекте требуется своевременная инспекция для того, чтобы обнаружить потенциальные проблемы в оборудовании и выполнить техническое обслуживание и, кроме того, гарантировать нормальную работу системы. Инспекция в режиме реального времени силового оборудования, предназначенного для работы в помещении, является важной для гарантирования его надежной и безопасной работы. При использовании робота на направляющей, можно проводить удобным и гибким образом инспекцию в реальном времени оборудования, предназначенного для работы в помещении, и можно обеспечить рабочее состояние оборудования.
[0004] Силовое оборудование, предназначенное для работы в помещении, обычно размещается рядами и слоями, и общая высота оборудования в каждом ряду отличается в зависимости от различных технических требований. В нормальных условиях необходимо контролировать в реальном времени температуру силового оборудования, предназначенного для работы в помещении. В дополнение к контролю температуры необходимо также контролировать внешний вид, повреждения, шум и показания приборов оборудования.
[0005] Технические проблемы, представленные в традиционной интеллектуальной инспекционной робототехнической системе на направляющей, предназначенной для работы в помещении, приведены ниже.
[0006] 1. Традиционный мобильный робот для инспекции и сбора информации об оборудовании, предназначенном для работы в помещении, приводится в движение в основном с помощью колес, гусениц или объединенным образом. Ограниченный пространством внутри помещения или расположением другого контролируемого оборудования, робот должен перемещаться в вертикальном направлении для достижения всесторонней инспекции оборудования. Традиционный колесный мобильный робот или гусеничный мобильный робот должен преодолевать силу тяжести для достижения вертикального перемещения, но вряд ли это можно достичь, так как для этого требуется большая сила трения. Кроме того, из-за ограниченного пространства внутри помещения замену батареи нельзя проводить в любое время, поэтому традиционный колесный мобильный робот или гусеничный мобильный робот не может иметь батарею.
[0007] 2. В одном аспекте традиционный мобильный робот для инспекции и сбора информации об оборудовании, предназначенном для работы в помещении, должен создавать как можно меньше электромагнитных помех для оборудования, имеющего высокую электромагнитную совместимость, и в другом аспекте должен иметь относительно низкую восприимчивость к внешним электромагнитным помехам. При проектировании электронных устройств конструктивное экранирование является распространенным способом повышения электромагнитной совместимости. Конструктивное электромагнитное экранирование требует надежной электрической непрерывности между соединенными поверхностями. Однако каждый из элементов металлической конструкции деформируется при механической обработке, особенно это касается пластинчатых структур. Пластинчатые структуры в значительной степени склонны к деформации, которую нельзя устранить, что приводит к образованию зазора между двумя конструктивными элементами в соединенном состоянии, что оказывает влияние на экранирующий эффект.
[0008] 3. В традиционном мобильном роботе для инспекции и сбора информации об оборудовании, предназначенном для работы в помещении, некоторые недостатки представлены в вентиляционной и теплоотводящей части , например, экранирующее и вентиляционное окно располагается в основном в необходимых вентиляционных отверстиях электронного устройства и может иметь двойное назначение - экранирование от электромагнитных помех (EMI) и хорошую вентиляцию. Традиционное окно электромагнитного экранирования имеет следующие недостатки: (a) традиционное окно электромагнитного экранирования не имеет пылезащитной функции, и пыль может накапливаться в корпусе из-за вентиляции, и в дальнейшем пыль может значительно уменьшить срок службы оборудования; (b) традиционное окно электромагнитного экранирования и корпус имеют плохой герметизирующий эффект между ними, и между окном электромагнитного экранирования и корпусом имеется зазор, что отрицательно сказывается на эффекте электромагнитного экранирования.
[0009] 4. В традиционном мобильном роботе для инспекции и сбора информации об оборудовании, предназначенном для работы в помещении, часть вспомогательных принадлежностей, используемых роботом, должна быть закреплена на земле или стене, однако традиционная заземляющая шпилька, проходящая через стену, имеет проблему, связанную с неудобным монтажом, так как ее необходимо привинчивать с двух сторон стенки шкафа, через которую проходит заземляющая шпилька. Кроме того, так как конструкция, предотвращающая выпадение, отсутствует, завинченная гайка заземляющей шпильки склонна к самопроизвольному откручиванию после ее ослабления, что может привести к ее падению или потере.
Раскрытие изобретения
[0010] Задача настоящей заявки состоит в том, чтобы устранить вышеупомянутые технические проблемы и предложить интеллектуальную инспекционную робототехническую систему на направляющей, предназначенную для работы в помещении, преимущество которой заключается в том, что она отвечает требованиям гарантирования инспекции оборудования, предназначенного для работы в помещении, без присутствия человека в реальном времени.
[0011] Для решения вышеуказанной задачи, ниже предоставлены технические решения согласно настоящей заявке.
[0012] Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, включает в себя систему дистанционного управления. Система дистанционного управления подключена по меньшей мере к одной робототехнической терминальной системе через Интернет, робототехническая терминальная система включает в себя профильную направляющую, которая установлена на стенке внутри помещения, подвижный механизм, механизм приведения в движение и инспекционный механизм смонтированы на профильной направляющей; инспекционный механизм включает в себя опорную головку и инспекционный узел, инспекционный механизм установлен на подвижном механизме, подвижный механизм приводится в движение с помощью механизма приведения в движение, подвижный механизм позволяет инспекционному механизму перемещаться вверх и вниз вдоль профильной направляющей, и совместно с работой опорной головки достигается инспекция оборудования, предназначенного для работы в помещении, подлежащего инспекции в большом диапазоне параметров.
[0013] Средство для подачи питания и осуществления связи робототехнической терминальной системы выбирается из любого из трех случаев:
случай один: подача питания и осуществление связи выполняются посредством тяговой цепи;
случай два: подача питания выполняется посредством скользящей контактной линии и осуществление связи выполняется посредством линии электропитания; и
случай три: подача питания выполняется посредством скользящей контактной линии, и осуществление связи выполняется за счет применения излучающего кабеля или микроволновой технологии.
[0014] Система дистанционного управления подключена к робототехнической терминальной системе через специальный силовой кабель.
[0015] Подвижный механизм включает в себя узел синхронного шкива и синхронный ремень. Узел синхронного шкива включает в себя корпуса синхронных шкивов и синхронные шкивы. Корпуса синхронных шкивов установлены на верхнем конце и нижнем конце профильной направляющей, соответственно. Синхронные шкивы установлены в корпусах синхронных шкивов, соответственно, и синхронный ремень вращается вокруг синхронных шкивов.
[0016] Механизм приведения в движение позволяет перемещать инспекционный механизм вверх и вниз. Механизм приведения в движение включает в себя серводвигатель переменного тока и редуктор скорости. Серводвигатель переменного тока установлен вместе с синхронным шкивом через редуктор скорости. Редуктор скорости закреплен на корпусе синхронного шкива в нижней части профильной направляющей.
[0017] Инспекционный механизм включает в себя первый блок управления. Первый блок управления осуществляет связь, управляет и подает питание на инспекционный узел и опорную головку. Первый блок управления установлен на каретке, и каретка жестко соединена с синхронным ремнем. Каретка установлена на профильной направляющей с помощью скользящего контакта, синхронный ремень позволяет перемещать каретку вверх и вниз вдоль профильной направляющей, и опорная головка устанавливается на первом блоке управления. Первый блок управления используется также как консоль, и инспекционный узел установлен на опорной головке.
[0018] Робототехническая терминальная система дополнительно включает в себя второй блок управления, установленный рядом с направляющей, второй блок управления осуществляет связь с первым блоком управления и подает питание на первый блок управления. Второй блок управления дополнительно служит для управления движением серводвигателя переменного тока; и
робототехническая терминальная система может снабжаться энергией и осуществлять связь посредством протянутых кабелей или может снабжаться энергией посредством скользящей контактной линии и осуществлять связь посредством линии электропитания в зависимости от различных требований.
[0019] Выключатель между источником питания, подключенным посредством протянутых кабелей, и источником питания, подключенным посредством скользящей контактной линии, выполнен с помощью системы бесперебойного электроснабжения (UPS).
[0020] В том случае, если робот снабжается энергией и осуществляет связь посредством тяговой цепи, контроллер инспекционного устройства, видеосервер, первый коммутатор и первый модуль электропитания устанавливаются в первом блоке управления, видеосервер осуществляет связь, соответственно, с инфракрасным тепловым формирователем изображений и оптической камерой, и первый коммутатор осуществляет связь с видеосервером, первый коммутатор осуществляет связь с контроллером инспекционного устройства, и контроллер инспекционного устройства осуществляет связь с опорной головкой, инфракрасным тепловым формирователем изображений и оптической камерой, соответственно, и первый модуль электропитания подает питание в питаемые устройства в первом блоке управления;
контроллер движения серводвигателя переменного тока, сервопривод, второй модуль электропитания, второй коммутатор и первый фотоэлектрический преобразователь установлены во втором блоке управления, фотоэлектрический преобразователь осуществляет связь со вторым коммутатором, и второй коммутатор осуществляет связь с контроллером движения, контроллер движения осуществляет связь с сервоприводом, первый фотоэлектрический преобразователь осуществляет связь с системой дистанционного управления, контроллер движения осуществляет связь с нулевым переключателем, первым переключателем ограничения положения и вторым переключателем ограничения положения, сервопривод осуществляет связь с серводвигателем переменного тока, и второй модуль электропитания подает питание в различные электрические модули во втором блоке управления и подает питание в первый блок управления.
[0021] В случае, если система снабжается энергией посредством тяговой цепи, отдельные кабели предусмотрены, соответственно, для подачи питания и осуществления связи первого блока управления, кабель для подачи питания выходит из второго блока управления, кабель для осуществления связи подключен к коммутатору во втором блоке управления. Пластина, закрывающая тяговую цепь, и тяговая цепь установлены на профильной направляющей. Пластина, закрывающая тяговую цепь, закреплена на профильной направляющей посредством элемента крепления пластины, закрывающей тяговую цепь, и кабель для подачи питания и кабель для осуществления связи, размещаются на тяговой цепи, и тяговая цепь используется для защиты кабелей.
[0022] В том случае, если робот снабжается энергией посредством скользящей контактной линии и осуществляет связь посредством линии электропитания, контроллер инспекционного устройства, видеосервер, первый коммутатор, первый модем связи по линии электропитания и первый модуль электропитания установлены в первом блоке управления, видеосервер осуществляет связь, соответственно, с инфракрасным тепловым формирователем изображений и оптической камерой в инспекционном узле, и первый коммутатор осуществляет связь с видеосервером, первый коммутатор осуществляет связь с контроллером инспекционного устройства, и контроллер инспекционного устройства осуществляет связь с опорной головкой, инфракрасным тепловым формирователем изображений и оптической камерой, соответственно, и первый модуль электропитания подает питание в различные питаемые устройства в первом блоке управления;
контроллер движения серводвигателя переменного тока, сервопривод, второй модуль электропитания, второй коммутатор и первый фотоэлектрический преобразователь и второй модем связи по линии электропитания установлены во втором блоке управления, первый фотоэлектрический преобразователь осуществляет связь со вторым коммутатором, и второй коммутатор осуществляет связь с контроллером движения, контроллер движения осуществляет связь с сервоприводом, первый фотоэлектрический преобразователь осуществляет связь с системой дистанционного управления, контроллер движения осуществляет связь с нулевым переключателем, первым переключателем ограничения положения и вторым переключателем ограничения положения, сервопривод осуществляет связь с серводвигателем переменного тока, и второй модуль электропитания подает питание в различные электрические модули второго блока управления, и подает питание в первый блок управления; и
первый модем связи по линии электропитания имеет один конец, соединенный с первым коммутатором, и другой конец, соединенный с одним концом второго модема связи по линии электропитания, и другой конец второго модема связи по линии электропитания соединен со вторым коммутатором.
[0023] В том случае, если система снабжается энергией посредством скользящей контактной линии, средство связи, применяемое инспекционным механизмом при выполнении управления, представляет собой связь по линии электропитания. Токоприемник устанавливается на первом блоке управления с помощью крепежной пластины токоприемника. Место крепления скользящей контактной линии установлено на профильной направляющей, и скользящая контактная линия установлена в место крепления скользящей контактной линии. Токоприемник имеет две контактные пластины, обеспечивающие контакт со скользящей контактной линией. Два полюса токоприемника подсоединены к двум концам первого модема связи по линии электропитания первого блока управления, а также подсоединены к двум концам первого модуля электропитания первого блока управления.
[0024] Два полюса скользящей контактной линии подсоединены к модему связи по линии электропитания во втором блоке управления, а также подсоединены к двум концам второго модуля электропитания второго блока управления.
[0025] Скользящая контактная линия включает в себя медный проводник и изоляционное покрытие. Медный проводник изготовлен в виде втулки. Токоприемник имеет проводники, количество которых совпадает с количеством проводников скользящей контактной линии, которые находятся в соединении с проводниками скользящей контактной линии способом скользящего контакта.
[0026] Робототехническая терминальная система дополнительно включает в себя механизм ограничения положения, и механизм ограничения положения включает в себя переключатели ограничения положения, установленные на двух концах профильной направляющей, блокировочный элемент переключателя ограничения положения установлен на задней поверхности блока управления, которая находится в контакте с профильной направляющей, и блокировочный элемент переключателя ограничения положения находится во взаимодействии с переключателем ограничения положения для предотвращения столкновения из-за аварийного отключения электроэнергии.
[0027] Первый фотоэлектрический преобразователь второго блока управления преобразует все обнаруженные видеосигналы, и сигналы изображения и сигналы управления в оптические сигналы и затем передает оптические сигналы в систему дистанционного управления через оптическое волокно, которая реализует обработку обнаруженной информации относительно всей системы и выполнить операцию дистанционного управления в отношении инспекции и состояния движения.
[0028] Датчик положения серводвигателя переменного тока подсоединен к сервоприводу, который управляет кареткой на направляющей посредством импульсов счета, и перемещает инспекционный узел в точно определенное положение для выполнения инспекции.
[0029] Серводвигатель переменного тока оснащен электромагнитным тормозом, который позволяет торможение в случае отказа питания.
[0030] Профильная направляющая установлена вертикально на поверхности внутренней стены посредством конструкции крепления направляющей.
[0031] Синхронный ремень, который взаимодействует с синхронными шкивами, установлен в паз профильной направляющей.
[0032] Инспекционный узел включает в себя инфракрасную камеру, камеру видимого диапазона, датчик пожарной сигнализации, датчик напряженности электромагнитного поля и ультрафиолетовый датчик.
[0033] Редуктор скорости прикреплен ко второму корпусу синхронного шкива, расположенному в нижней части профильной направляющей с помощью фланцевого узла.
[0034] Пластина, закрывающая тяговую цепь, представляет собой L-образный алюминиевый профиль, и L-образный алюминиевый профиль и профильная направляющая образуют направляющий паз для фиксации и направления тяговой цепи.
[0035] Нижний конец профильной направляющей смонтирован с нулевым переключателем в качестве исходной точки работы робота, при этом каждый раз перед подачей питания на инспекционный робот, робот автоматически возвращается в исходную точку и затем выполняет назначенную задачу инспекции.
[0036] Второй блок управления подает питание и служит в качестве связного ретранслятора для всего терминала робототехнической системы, управляет движением серводвигателя переменного тока и преобразует сигнал управления связи в фотоэлектрический сигнал для того, чтобы достичь дистанционной связи.
[0037] Система дистанционного управления включает в себя второй фотоэлектрический преобразователь и верхний компьютер, сигналы связи преобразуются фотоэлектрическим способом с помощью второго фотоэлектрического преобразователя для того, чтобы достичь связи между системой дистанционного управления и робототехнической терминальной системой.
[0038] В каждом из первого блока управления и второго блока управления предусмотрен корпус модуля электромагнитного экранирования, и корпус модуля электромагнитного экранирования вмещает в себя монтажную плату. В корпусе сформировано отверстие установки штепсельного разъема в соответствии с требованием внешнего подключения интерфейса монтажной платы или электронного компонента, установленного в корпусе, и отверстие установки штепсельного разъема используется для установки штепсельного разъема типа, обеспечивающего электромагнитную совместимость.
[0039] Корпус модуля электромагнитного экранирования включает в себя корпус и экранирующую накрывающую пластину, размещенную на корпусе. Экранирующая накрывающая пластина включает в себя металлическую пластину, гибкую прокладку и металлическую фольгу, которые располагаются друг над другом в указанной последовательности в направлении снаружи внутрь. Внутреннее пространство корпуса представляет собой полость, и внутренняя стенка корпуса выполнена с уступом.
[0040] В экранирующей накрывающей пластине выполнено установочное отверстие, и резьбовое отверстие выполнено на уступе, корпус и экранирующая накрывающая пластина неподвижно соединены с помощью стандартного крепежного элемента через установочное отверстие и резьбовое отверстие.
[0041] Второй блок управления выполнен с вентиляционным и пылезащитным окном электромагнитного экранирования на боковой стороне. Вентиляционное и пылезащитное окно электромагнитного экранирования включает в себя первую рамку и вторую рамку, причем каждая из двух рамок выполнена с уступом, сформированным по внутреннему контуру, для фиксации вентиляционной металлической пластины; вторая рамка выполнена с неглубокой прямоугольной канавкой, сформированной по внутреннему контуру, прокладка из токопроводящей резины приклеивается в прямоугольной канавке второй рамки с помощью токопроводящего клея, ячеистая вентиляционная металлическая пластина и пылезащитный экран последовательно вставляются в верхнюю металлическую рамку и нижнюю металлическую рамку.
[0042] Корпус блока второго блока управления крепится к земле с помощью шпильки защитного заземления, причем шпилька защитного заземления включает в себя заземляющую шпильку с двусторонней резьбой, шестигранную гайку, плоскую шайбу и гайку ручной затяжки и в средней части заземляющей шпильки с двусторонней резьбой установлен фланец, и каждая из двух ее концевых частей имеет резьбу. Одна из двух концевых частей заземляющей шпильки с двусторонней резьбой выполнена с центральным отверстием для зенковки и сплющивания, а другая из двух концевых частей заземляющей шпильки с двусторонней резьбой подвергнута механической обработке и имеет в поперечном сечении форму усеченного с двух сторон круга или D-образную форму. Шестигранную гайку, плоскую шайбу и гайку ручной затяжки последовательно завинчивают на концевую часть, выполненную с центральным отверстием, заземляющей шпильки с двусторонней резьбой.
[0043] Положительные эффекты настоящей заявки заключаются в следующем.
[0044] 1. Настоящую заявку можно применить в области инспекции подстанции, предназначенной для работы в помещении, области инспекции небольшого помещения подстанции, области инспекции зала преобразовательных вентилей преобразовательной электрической подстанции и можно применить в процессе выполнения задачи инспекции для других закрытых пространств.
[0045] 2. В настоящей заявке используется направляющая, монтируемая на стене, и настоящая заявка может удовлетворить различным и сложным требованиям инспекции для инспекции оборудования в подстанции, предназначенной для работы в помещении, или в зале преобразовательных вентилей преобразовательной электрической подстанции путем объединения многочисленных роботов на направляющих.
[0046] 3. Профильные направляющие и традиционная система привода используются в направляющей в соответствии с настоящей заявкой. Профиль имеет высокую конструкционную прочность, большую жесткость и обеспечивает плавную надежную работу направляющей. Кроме того, материал получается легче, и систему можно установить намного быстрее. Используемая система привода синхронного ремня имеет высокую точность перемещения и может отвечать требованиям инспекции для любых точно определенных положений. Направляющую можно удлинить путем присоединения для того, чтобы соответствовать требованиям инспекции с большими перемещениями.
[0047] 4. Серводвигатель переменного тока согласно настоящей заявке имеет тормоз, который может блокироваться надежным образом с целью торможения в случае отключения питания.
[0048] 5. Настоящее изобретение позволяет осуществить подачу питания и связь посредством скользящей контактной линии совместно с технологией связи по линии электропитания, или используя протянутые кабели тяговой цепи, которые могут противостоять помехам связи из-за сложной электромагнитной обстановки в подстанции, предназначенной для работы в помещении, или в зале преобразовательных вентилей преобразовательной электрической подстанции, когда используется беспроводная связь, и передача выполняется в увеличенной полосе пропускания, что позволяет обеспечить надежную передачу видеосигналов и сигналов управления и компактную конструкцию.
[0049] 6. В настоящей заявке питание подается по кабелю, чтобы емкость батареи не ограничивала время автономной инспекции, без, таким образом, время инспекции является более гибким и может быть достигнута длительная непрерывная инспекция.
[0050] 7. Первый блок управления согласно настоящей заявке может действовать как консольный блок, для перемещения вместе с кареткой, и система управления разработана легко приспособляемой.
[0051] 8. Инспекционный узел согласно настоящей заявке можно объединить с инспекционным устройством, работающим в видимой, инфракрасной и ультрафиолетовой областях спектра, устройством захвата, детектором газа, датчиком напряженности электромагнитного поля и т.д. в зависимости от требований к практическому использованию, что облегчает выполнение различных требований к инспекции подстанции, предназначенной для работы в помещении, или зала преобразовательных вентилей преобразовательной электрической подстанции.
[0052] 9. В том случае, если подача питания производится посредством протянутых кабелей тяговой цепи, пластина, закрывающая тяговую цепь, представляет собой L-образный алюминиевый профиль, при этом можно установить пластину, закрывающую тяговую цепь, большого размера, и можно легко получить материал. L-образный алюминиевый профиль и направляющая образуют направляющий паз, который не только фиксирует тяговую цепь, но также и направляет тяговую цепь.
[0053] 10. Настоящую заявку можно также применить во всех случаях, когда требуется инспекция в вертикальном направлении для внутреннего помещения для того, чтобы устранить ручную работу, и наибольшая величина перемещения может составлять десятки метров.
[0054] 11. Корпус модуля электромагнитного экранирования согласно настоящей заявке позволяет усилить герметизирующий эффект экранирующей накрывающей пластины из-за наличия гибкой прокладки. Корпус выполнен с уступом для установки экранирующей накрывающей пластины. Корпус можно сформировать путем фрезерования цельного куска металла, в результате чего можно добиться хорошего экранирующего эффекта. Экранирующая накрывающая пластина, использующая гибкую прокладку и лист металлической фольги, имеет простую конструкцию и имеет более низкую стоимость по сравнению с конструкцией, в которой для экранирования используется электропроводящий материал.
[0055] 12. Вентиляционное и пылезащитное окно электромагнитного экранирования применяется в экранирующем корпусе, к которому предъявляются высокие требования по защите от электромагнитного излучения и к вентиляции. Окно электромагнитного экранирования установлено в положении, где требуется отверстие, и ячеистая металлическая конструкция образует хороший электромагнитный экран. Вторая рамка устанавливается с прокладкой из токопроводящей резины, которая повышает герметизирующий эффект между металлической рамкой и корпусом, предотвращает формирование зазора между окном экранирования и корпусом и повышает эффект электромагнитного экранирования. Пыль может значительно уменьшить срок службы устройства, в то время как пылезащитный экран может эффективным образом препятствовать накоплению пыли в корпусе из-за вентиляции, таким образом повышая срок службы устройства.
[0056] 13. Заземляющая шпилька согласно настоящей заявке имеет простую и компактную конструкцию, и материал заземляющей шпильки представляет собой медный сплав, который легко подвергается механической обработке. Стандартные элементы, используемые совместно с заземляющей шпилькой, изготовлены из меди, имеют хорошую проводимость и маленькое сопротивление заземления. Один конец заземляющей шпильки выполнен с установочным отверстием, имеющим такую же форму, как и форма установочного отверстия, выполненного в шкафе, где установлена заземляющая шпилька, тем самым препятствуя проворачиванию заземляющей шпильки во время монтажа и закручивания. Другой конец заземляющей шпильки выполнен с центральным отверстием, и этот конец зенкуется и сплющивается после завинчивания на него барашковой гайки, что окончательно предотвращает самопроизвольное откручивание с него барашковой гайки, таким образом, барашковая гайка не может быть легко потеряна.
Краткое описание чертежей
[0057] Для более наглядной иллюстрации вариантов осуществления настоящей заявки или технических решений в традиционной технологии ниже будут кратко описаны чертежи, необходимые для описания вариантов осуществления или традиционной технологии. Очевидно, что чертежи в последующем описании представляют собой только несколько вариантов осуществления настоящей заявки, и специалисты в данной области техники могут получить другие чертежи на основании этих чертежей без каких-либо творческих усилий.
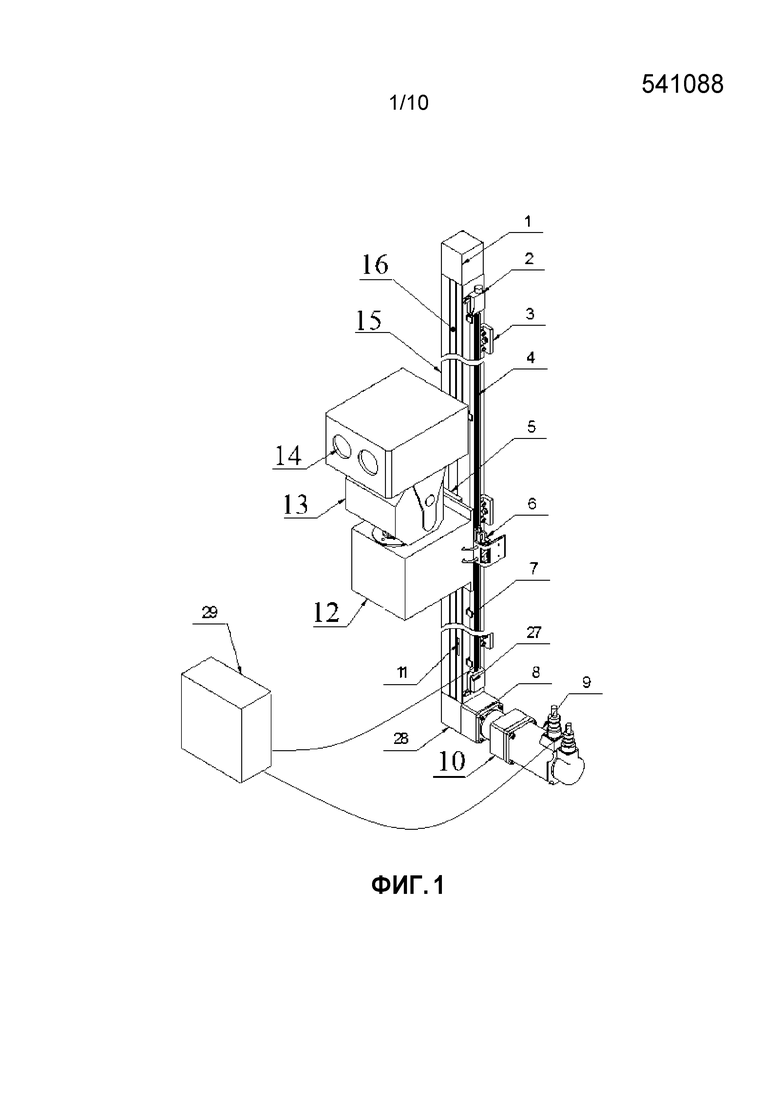
[0058] Фиг.1 - представляет собой схематичный вид, показывающий конструкцию инспекционной робототехнической терминальной системы на направляющей, в которой подача питания на терминал осуществляется через скользящую контактную линию;
[0059] фиг.2 - представляет собой схематичный вид, показывающий конструкцию инспекционной робототехнической терминальной системы на направляющей, подача питания на терминал осуществляется через тяговую цепь;
[0060] фиг.3 - представляет собой схематичный вид, показывающий конструкцию подачи питания по скользящей контактной линии инспекционного робототехнического терминала на направляющей;
[0061] фиг.4 - представляет собой схематичный вид, показывающий узел пластины тяговой цепи и монтажной угловой части направляющей;
[0062] фиг.5 - показывает примерный вид в разрезе профильной направляющей инспекционного робота на направляющей, которая может использоваться;
[0063] фиг.6 - представляет собой схематичный вид, показывающий внешний вид конструкции крепления направляющей;
[0064] фиг.7 - представляет собой схематичный вид в разрезе пластины тяговой цепи;
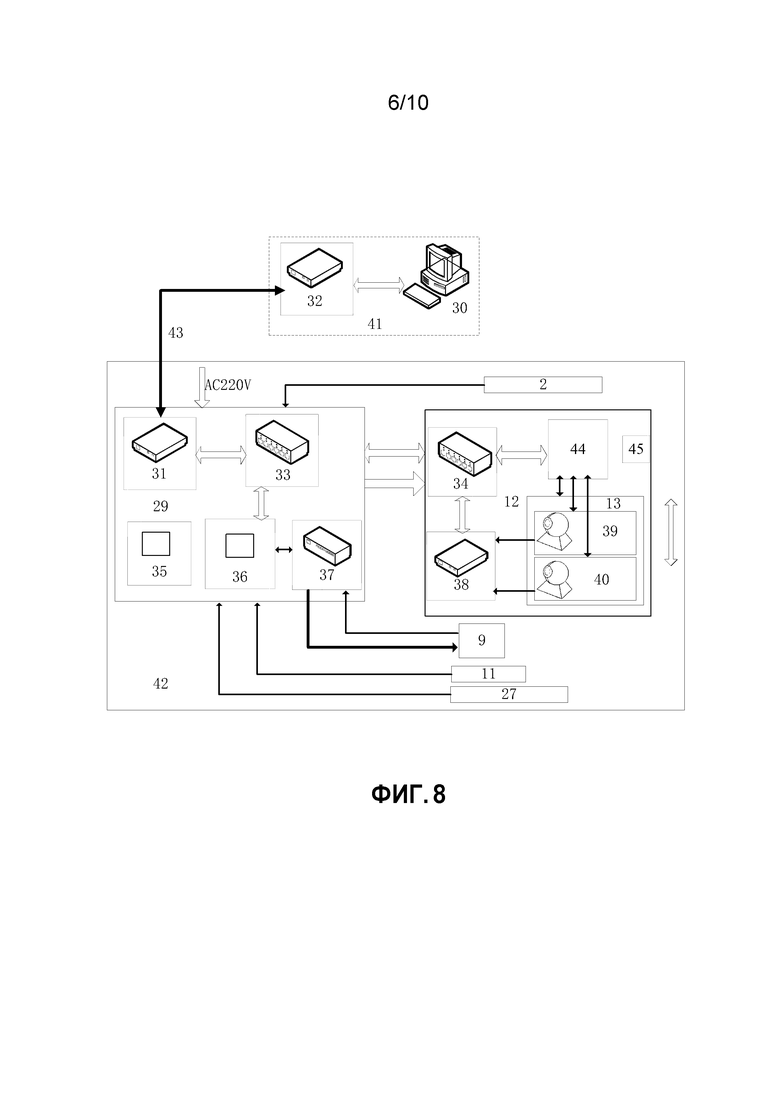
[0065] фиг.8 - представляет собой структурную схему управления робототехнической терминальной системы, снабжаемой энергией с помощью тяговой цепи;
[0066] фиг.9 - представляет собой схему сборки, показывающую конструкцию модуля экранирования;
[0067] фиг.10 - представляет собой вид, показывающий конструкцию корпуса;
[0068] фиг.11 - представляет собой покомпонентный вид накрывающей пластины;
[0069] фиг.12 - представляет собой покомпонентный вид, показывающий сборку вентиляционного и пылезащитного окна электромагнитного экранирования;
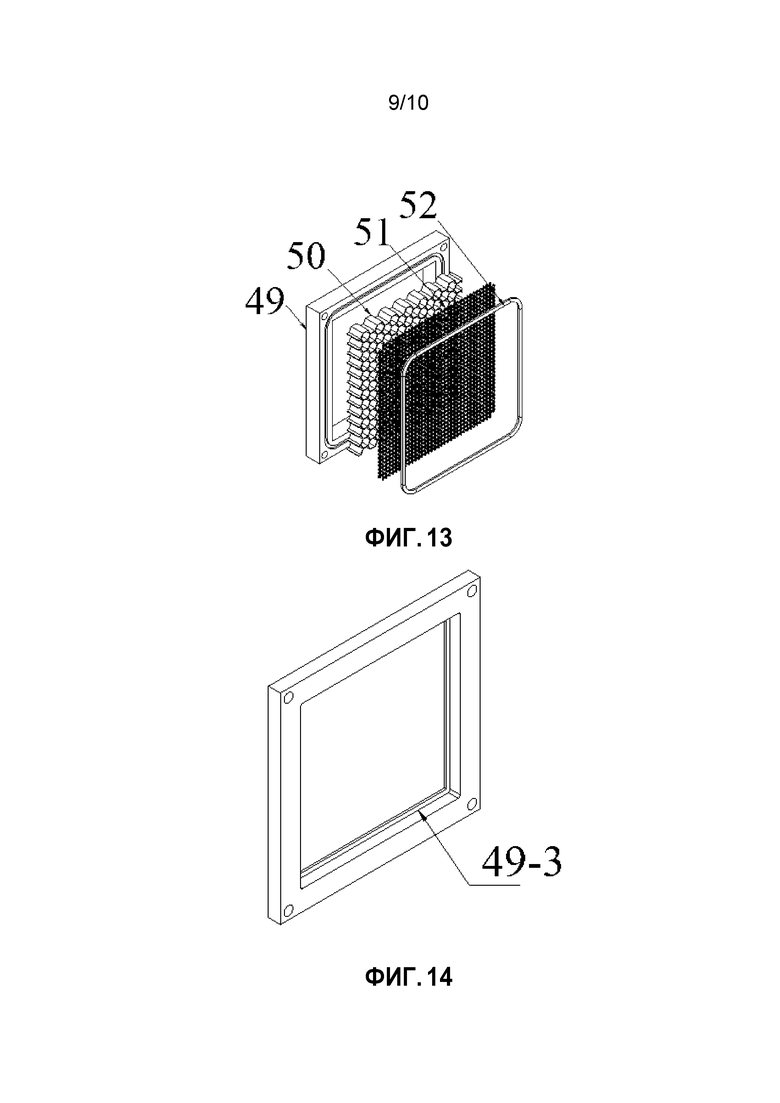
[0070] фиг.13 - представляет собой покомпонентный вид, показывающий сборку вентиляционного и пылезащитного окна электромагнитного экранирования;
[0071] фиг.14 - представляет собой схематичный вид, показывающий уступ, на который устанавливается вентиляционная металлическая пластина, верхней рамки и нижней рамки;
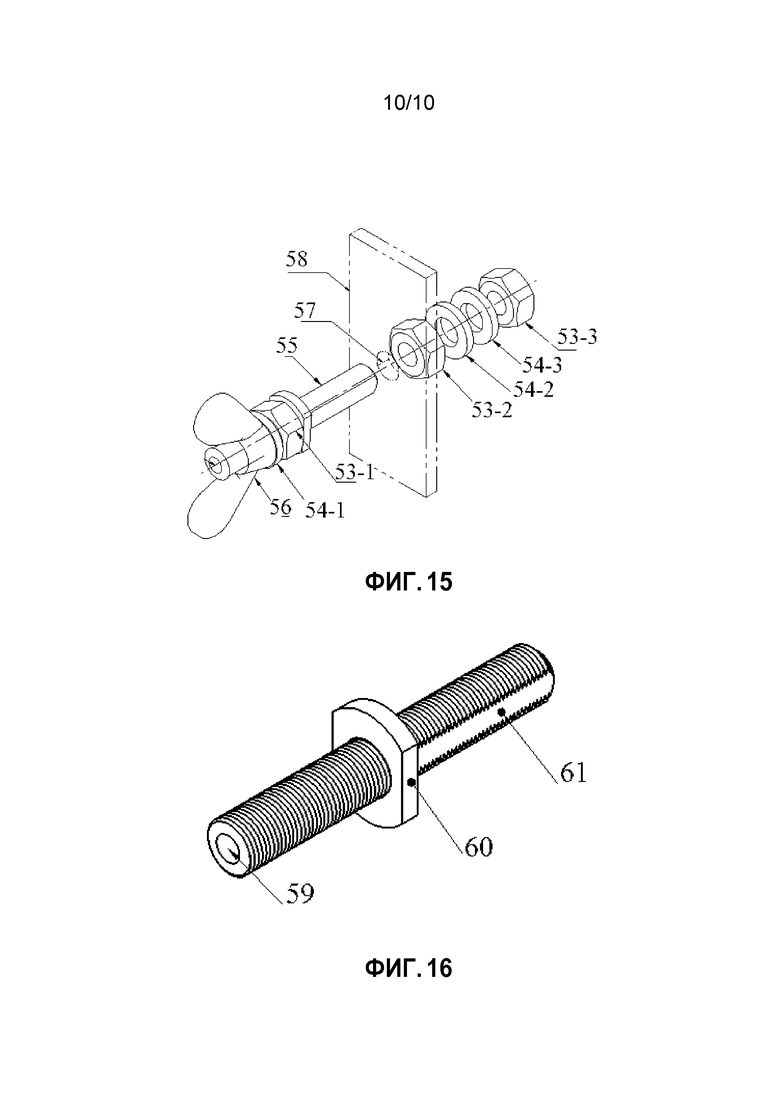
[0072] фиг.15 - представляет собой схематичный вид, показывающий сборку шпильки защитного заземления согласно настоящей заявке;
[0073] фиг.16 - представляет собой схематичный вид, показывающий конструкцию заземляющей шпильки с двусторонней резьбой согласно настоящей заявке;
[0074] Перечень ссылочных позиций на фигурах 1-16
1 - первый узел синхронного шкива,
2 - первый переключатель ограничения положения,
3 - конструктивный элемент для крепления направляющей,
4 - скользящая контактная линия,
5 - каретка,
6 - токоприемник,
7 - место крепления скользящей контактной линии,
8 - фланцевый узел,
9 - серводвигатель переменного тока,
10 - редуктор скорости,
11 - нулевой переключатель,
12 - первый блок управления,
13 - опорная головка,
14 - инспекционный узел,
15 - профильная направляющая,
16 - синхронный ремень,
17 - тяговая цепь,
18 - пластина, закрывающая тяговую цепь,
19 - блокировочный элемент переключателя ограничения положения,
20 - крепежная пластина токоприемника,
21 - крепежный элемент пластины, закрывающей тяговую цепь,
22 - первый паз,
23 - второй паз,
24 - третий паз,
25 - четвертый паз,
26 - пятый паз,
27 - второй переключатель ограничения положения,
28 - второй узел синхронного шкива,
29 - второй блок управления,
30 - верхний компьютер,
31 - первый фотоэлектрический преобразователь,
32 - второй фотоэлектрический преобразователь,
33 - первый коммутатор,
34 - второй коммутатор,
35 - второй модуль электропитания,
36 - контроллер движения,
37 - сервопривод,
38 - видеосервер,
39 - инфракрасный тепловой формирователь изображений,
40 - оптическая камера,
41 - система дистанционного управления,
42 - робототехническая терминальная система,
43 - оптическое волокно,
44 - контроллер инспекционного устройства,
45 - первый модуль электропитания,
46 - экранирующая накрывающая пластина,
47 - корпус,
48 - стандартный крепежный элемент,
68 – штепсельный разъем,
46-1 - металлическая пластина,
46-2 - гибкая прокладка,
46-3 - лист металлической фольги;
47-1 - внешняя стенка корпуса,
47-2 - резьбовое отверстие,
47-3 - уступ,
47-4 - отверстие для установки штепсельного разъема;
49 - рамка,
49-1 - первая рамка,
49-2 - вторая рамка,
49-3 - уступ первой рамки и второй рамки, где устанавливается вентиляционная металлическая пластина
50 - вентиляционная ячеистая металлическая пластина,
51 - пылезащитный экран,
52 - прокладка из токопроводящей резины;
53-1 - первая шестигранная гайка,
53-2 - вторая шестигранная гайка,
53-3 - третья шестигранная гайка,
54-1 - первая плоская шайба,
54-2 - вторая плоская шайба,
54-3 - третья плоская шайба,
55 - заземляющая шпилька с двусторонней резьбой,
56 - барашковая гайка,
57 - отверстие шкафа,
58 - стенка шкафа,
59 - центральное отверстие на одном конце заземляющей шпильки,
60 - фланцевая пластина,
61 - другой механически обработанный конец заземляющей шпильки с двусторонней резьбой, имеющий в поперечном сечении форму усеченного с двух сторон круга или D-образную форму.
Подробное описание изобретения
[0075] Настоящая заявка будет подробно описана со ссылкой на сопроводительные чертежи и варианты осуществления.
[0076] Как показано на фиг.1, интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, включает в себя робототехническую терминальную систему 42. Робототехническая терминальная система 42 осуществляет связь с системой 41 дистанционного управления. Робототехническая терминальная система 42 включает в себя профильную направляющую 15, которая смонтирована вертикально на внутренней поверхности стены. Подвижный механизм, механизм приведения в движение и инспекционный механизм смонтированы на профильной направляющей 15.
[0077] Подвижный механизм включает в себя первый узел 1 синхронного шкива, второй узел 28 синхронного шкива и синхронный ремень 16. Каждый узел синхронного шкива включает в себя корпус синхронного шкива и синхронный шкив. Корпуса синхронных шкивов установлены на верхнем конце и нижнем конце профильной направляющей 15, соответственно, и синхронные шкивы смонтированы в корпусах синхронных шкивов, соответственно. Синхронный ремень 16 в натянутом состоянии вращается вокруг синхронных шкивов.
[0078] Механизм приведения в движение позволяет инспекционному механизму двигаться вверх и вниз, и механизм приведения в движение включает в себя серводвигатель 9 переменного тока и редуктор 10 скорости. Серводвигатель 9 переменного тока смонтирован вместе с синхронным шкивом через редуктор 10 скорости. Редуктор 10 скорости прикреплен на втором корпусе синхронного шкива, расположенному на нижнем конце профильной направляющей 15, через фланцевый узел 8.
[0079] Инспекционный механизм включает в себя первый блок 12 управления. Первый блок 12 управления осуществляет связь с системой управления и подает питание на инспекционный узел 14 и опорную головку 13. Первый блок 12 управления смонтирован на каретке 5, и каретка 5 неподвижно присоединена к синхронному ремню 16. Каретка 5 смонтирована на профильной направляющей 15 с возможностью скользящего контакта с профильной направляющей 15. Синхронный ремень 16 позволяет каретке 5 двигаться вверх и вниз вдоль профильной направляющей 15, и опорная головка 13 смонтирована на первом блоке 12 управления, поэтому первый блок 12 управления также выполняет функции консоли. Инспекционный узел 14 смонтирован на опорной головке 13, и инспекционный узел 14 включает в себя инфракрасный тепловой формирователь 39 изображений, оптическую камеру 40 и т.д.
[0080] Робототехническая терминальная система 42 дополнительно включает в себя второй блок 29 управления, смонтированный рядом с направляющей. Второй блок 29 управления осуществляет связь с первым блоком 12 управления и передает сигнал, обнаруженный первым блоком 12 управления, в систему 41 дистанционного управления. Второй блок 29 управления дополнительно выполняет функцию управления движением узла приведения в движение по направляющей.
[0081] Робототехническая терминальная система 42, в зависимости от различных требований, снабжается энергией и осуществляет связь посредством тягового троса или снабжается энергией посредством скользящей контактной линии и осуществляет связь посредством связи по линии электропитания.
[0082] В том случае, если робот снабжается энергией и осуществляет связь посредством тяговой цепи, контроллер 44 инспекционного устройства, видеосервер 38, первый коммутатор 33, первый модуль 45 электропитания и т.д. монтируются в первом блоке 12 управления. Видеосервер 38 осуществляет связь с инфракрасным тепловым формирователем 39 изображений и оптической камерой 40, соответственно, и первый коммутатор 33 осуществляет связь с видеосервером 38. Первый коммутатор 33 осуществляет связь с контроллером 44 инспекционного устройства, и контроллер 44 инспекционного устройства осуществляет связь с опорной головкой 13, инфракрасным тепловым формирователем 39 изображений и оптической камерой 40, соответственно, и первый модуль 45 электропитания подает питание в различные питаемые устройства.
[0083] Контроллер 36 движения серводвигателя 9 переменного тока, сервопривод 37, второй модуль 35 электропитания, второй коммутатор 34 и первый фотоэлектрический преобразователь 31 смонтированы во втором блоке 29 управления. Первый фотоэлектрический преобразователь 31 осуществляет связь со вторым коммутатором 34, и второй коммутатор 34 осуществляет связь с контроллером 36 движения, и контроллер 36 движения осуществляет связь с сервоприводом 37. Первый фотоэлектрический преобразователь 31 осуществляет связь с системой 41 дистанционного управления. Контроллер 36 движения осуществляет связь с нулевым переключателем 11, первым переключателем 2 ограничения положения и вторым переключателем 27 ограничения положения. Сервопривод 37 осуществляет связь с серводвигателем 9 переменного тока, и второй модуль 35 электропитания подает питание в различные питаемые модули.
[0084] В том случае, если робот снабжается энергией посредством скользящей контактной линии и осуществляет связь по линии электропитания, контроллер 44 инспекционного устройства, видеосервер 38, первый коммутатор 33, первый модем связи по линии электропитания и первый модуль 45 электропитания смонтированы в первом блоке 12 управления. Видеосервер 38 осуществляет связь с инфракрасным тепловым формирователем 39 изображений и оптической камерой 40 на инспекционном узле 8, соответственно, и первый коммутатор 33 осуществляет связь с видеосервером 38. Первый коммутатор 33 осуществляет связь с контроллером 44 инспекционного устройства, и контроллер 44 инспекционного устройства осуществляет связь с опорной головкой 13, инфракрасным тепловым формирователем 39 изображений и оптической камерой 40, соответственно, и первый модуль 45 электропитания подает питание на различные питаемые устройства.
[0085] Контроллер 36 движения серводвигателя 9 переменного тока, сервопривод 37, второй модуль 35 электропитания, второй коммутатор 34, первый фотоэлектрический преобразователь 31 и второй модем связи по линии электропитания смонтированы во втором блоке 29 управления. Первый фотоэлектрический преобразователь 31 осуществляет связь со вторым преобразователем 34, и второй преобразователь 34 осуществляет связь с контроллером 36 движения, контроллер 36 движения осуществляет связь с сервоприводом 37, первый фотоэлектрический преобразователь 31 осуществляет связь с системой 41 дистанционного управления. Контроллер 36 движения осуществляет связь с нулевым переключателем 11, первым переключателем 2 ограничения положения и вторым переключателем 27 ограничения положения. Сервопривод 37 осуществляет связь с серводвигателем 9 переменного тока, и второй модуль 35 электропитания подает питание в различные питаемые модули.
[0086] Первый модем связи по линии электропитания имеет один конец, соединенный с первым коммутатором 33, и другой конец, соединенный с одним концом второго модема связи по линии электропитания, и другой конец второго модема связи по линии электропитания соединен со вторым коммутатором 34.
[0087] В случае, если система снабжается энергией посредством скользящей контактной линии, средство связи, применяемое инспекционным механизмом при выполнении управления, представляет собой связь по линии электропитания. Токоприемник 6 смонтирован на первом блоке 12 управления с помощью крепежной пластины 20 токоприемника. Место 7 крепления скользящей контактной линии смонтировано на профильной направляющей 15, и скользящая контактная линия 4 смонтирована на месте 7 крепления скользящей контактной линии. Токоприемник 6 имеет две скользящие контактные пластины, контактирующие со скользящей контактной линией 4. Два полюса токоприемника 6 подсоединены к двум концам первого модема связи по линии электропитания первого блока 12 управления, и два полюса токоприемника 6 также подсоединены к двум концам первого модуля 45 электропитания из первого блока 12 управления. Два полюса скользящей контактной линии 4 подсоединены к модему связи по линии электропитания во втором блоке 29 управления, и два полюса скользящей контактной линии 4 также подсоединены к двум концам второго модуля 35 электропитания из второго блока 29 управления.
[0088] Скользящая контактная линия 4 состоит из медного проводника и изоляционного покрытия. Медный проводник можно изготовить в виде полой трубки. Токоприемник 6 имеет проводники, количество которых совпадает с количеством проводников скользящей контактной линии, и проводники токоприемника 6 обеспечивают соединение с проводниками скользящей контактной линии посредством скользящего контакта.
[0089] В том случае, если система снабжается энергией посредством тяговой цепи, первый блок 12 управления снабжается энергией и осуществляет связь посредством отдельных кабелей. Для второго блока 29 управления предусмотрен кабель электропитания. Кабель связи подключен к коммутатору во втором блоке 29 управления. Пластина 18, закрывающая тяговую цепь, и тяговая цепь 17 смонтированы на профильной направляющей 15, и пластина 18, закрывающая тяговую цепь, крепится к профильной направляющей 15 через крепежный элемент 21 пластина, закрывающей тяговую цепь. Кабель электропитания и кабель связи размещаются на тяговой цепи 17, и тяговая цепь 17 выполняет функции защиты кабелей.
[0090] Система 41 дистанционного управления включает в себя второй фотоэлектрический преобразователь 32 и верхний компьютер 30. Сигнал связи между системой 41 дистанционного управления и робототехнической терминальной системой 42 преобразуется фотоэлектрическим образом вторым фотоэлектрическим преобразователем 32 и передается в верхний компьютер 30.
[0091] Робототехническая терминальная система 42 дополнительно включает в себя механизм ограничения положения. Механизм ограничения положения включает в себя переключатель ограничения положения, смонтированный на двух концах профильной направляющей 15. Блокировочный элемент 19 переключателя ограничения положения смонтирован на задней поверхности блока управления, которая находится в контакте с профильной направляющей 15. Блокировочный элемент 19 переключателя ограничения положения используется вместе с переключателем ограничения положения для предотвращения столкновения, вызванного аварийным отключением питания.
[0092] Первый фотоэлектрический преобразователь 31 из второго блока управления преобразует полностью обнаруженные изображения и видеосигналы и сигналы управления в оптические сигналы, и затем оптические сигналы передаются в систему 41 дистанционного управления через оптическое волокно 43 таким образом, чтобы можно было обработать обнаруженное содержание относительно всей системы и выполнить операцию дистанционного управления по инспекции и состоянию движения.
[0093] Датчик положения серводвигателя 9 переменного тока подсоединен к сервоприводу 37 во втором блоке 29 управления, который может точно управлять кареткой 5 на направляющей, с помощью импульсов подсчета и, кроме того, перемещать инспекционный узел 14 в заданное положение для выполнения инспекции.
[0094] Серводвигатель 9 переменного тока оснащен электромагнитным тормозом, который обеспечивает торможение в случае отключения питания.
[0095] Профильная направляющая 15 смонтирована вертикально на внутренней поверхности стенки через конструктивный элемент для крепления профильной направляющей 3.
[0096] Синхронный ремень 16, взаимодействующий с синхронными шкивами, смонтирован в паз профильной направляющей 15.
[0097] Инспекционный узел 14 включает в себя инфракрасную камеру и камеру, работающую в видимом диапазоне спектра.
[0098] Пластина 18, закрывающая тяговую цепь, представляет собой L-образный алюминиевый профиль, и L-образный алюминиевый профиль и профильная направляющая 15 образуют направляющий паз для крепления и направления тяговой цепи.
[0099] На нижнем конце профильной направляющей 15 смонтирован нулевой переключатель 11 в качестве исходной точки для робота. Перед каждой подачей питания на инспекционный робот, робот сначала автоматически возвращается в исходную точку и затем выполняет назначенную задачу инспекции.
[0100] Второй блок управления подает питание и служит в качестве связного ретранслятора для всего терминала робототехнической системы, управляет движением серводвигателя переменного тока, и преобразует сигнал управления связи в фотоэлектрический сигнал.
[0101] Как показано на фиг.4, пластина 18, закрывающая тяговую цепь, и тяговая цепь 17 смонтированы на профильной направляющей 15, и пластина 18, закрывающая тяговую цепь, закреплена на профильной направляющей 15 с помощью крепежного элемента 21 пластины, закрывающей тяговую цепь.
[0102] Пластина 18, закрывающая тяговую цепь, представляет собой L-образный алюминиевый профиль, и L-образный алюминиевый профиль и профильная направляющая 15 образуют направляющий паз для крепления и направления тяговой цепи 17.
[0103] На нижнем конце профильной направляющей 15 смонтирован нулевой переключатель 11 в качестве исходной точки работы робота. Перед каждой подачей питания на инспекционный робот, робот сначала автоматически возвращается в исходную точку и затем выполняет назначенную задачу инспекции.
[0104] Система перемещения по направляющей в настоящей заявке включает в себя вертикальную профильную направляющую 15, синхронную систему ременного привода (первый узел 1 синхронного шкива, второй узел 28 синхронного шкива, каретку 5, серводвигатель 9 переменного тока, редуктор 10 скорости и фланцевый узел 8) и т.д.
[0105] Длину профильной направляющей 15 можно определить в зависимости от требований к диапазону инспекции инспекционного робота, и длина профильной направляющей 15 может достигать нескольких десятков метров за счет присоединения. Первый узел 1 синхронного шкива и второй узел 28 синхронного шкива, соответственно, смонтированы на двух концах профильной направляющей, и синхронный ремень 16 и каретка 5 также смонтированы на профильной направляющей. Каретка 5 неподвижно прикреплена к синхронному ремню 16. На фиг.5 показан примерный разрез профильной направляющей, которая может использоваться в качестве профильной направляющей 15. В частности, третий паз 24 представляет собой T-образный паз, такой что с его помощью можно жестко присоединить другие устройства к направляющей посредством Т-образной гайки, и четвертый паз 25 можно предусмотреть для монтирования прямоугольных элементов, таких как нулевой переключатель 11. Второй паз 23 и пятый паз 26 обеспечивают промежутки для монтирования синхронного ремня, и первые пазы 22 на левой и правой сторонах можно предусмотреть для монтирования круглых направляющих гладких валов. Подшипники для поддержки и направления каретки 5 смонтированы на каретке 5 для взаимодействия с гладкими валами. На нижнем конце направляющей серводвигатель 9 переменного тока и редуктор 10 скорости смонтированы вместе со вторым узлом 28 синхронного шкива на нижнем конце направляющей с помощью фланцевого узла 8. Серводвигатель 9 переменного тока вращает и позволяет вращаться синхронному шкиву, и синхронный шкив позволяет перемещаться вместе синхронному ремню 16 и каретке 5 вверх и вниз, что образует систему привода в движение по направляющей инспекционного робота.
[0106] Первый блок 12 управления смонтирован на каретке 5, и программные и аппаратные средства управления для инспекционного робота смонтированы в первом блоке 12 управления, и первый блок 12 управления может также выполнять функции консоли для опорной головки 13 и инспекционного узла 14. Инспекционный узел 14, приводимый в движение с помощью каретки 5, может перемещаться вверх и вниз вместе с поворотным движением в горизонтальной плоскости и движением наклона опорной головки 13, таким образом, могут быть удовлетворены требования всесторонней инспекции за оборудованием.
[0107] В настоящей заявке робот на направляющей, может снабжаться энергией и осуществлять связь через линию, которую можно реализовать следующими двумя способами: первый способ предусматривает использование скользящей контактной линии 4 и технологии связи по линии электропитания, как показано на фиг.1, и другой способ предусматривает использование тяговой цепи, которая тянет кабели, как показано на фиг.2.
[0108] В способе подачи питания и осуществления связи через скользящую контактную линию 4, как показано на фиг.1, скользящая контактная линия 4 включает в себя две или более опор для проводников, имеющих в поперечном сечении форму язычка или другую неправильную форму, и место 7 крепления скользящей контактной линии. Место 7 крепления скользящей контактной линии смонтировано на вертикальной профильной направляющей 15, и скользящая контактная линия 4 впрессована в зажимной паз места 7 крепления скользящей контактной линии с пластмассовой изоляцией для того, чтобы достичь монтирования скользящей контактной линии 4. Токоприемник 6 смонтирован на первом блоке 12 управления с помощью крепежной пластины 20 токоприемника. Первый модуль 45 электропитания и первый модем связи по линии электропитания и т.п. установлены в первом блоке 12 управления, который обеспечивает подачу питания на инспекционный робот и осуществление связи с инспекционным роботом через линию.
[0109] Скользящую контактную линию 4 можно реализовать в виде двух или более опор. В том случае, если скользящая контактная линия 4 воплощена в виде двух опор, используется технология связи по линии электропитания, и в первом блоке 12 управления предусмотрен модем связи по линии электропитания для достижения подачи питания и надежной связи без протянутых кабелей во время перемещения. В том случае, если скользящая контактная линия 4 воплощена в виде более чем двух опор, технологию связи по линии электропитания нельзя использовать, и сигнальная линия и линия электропитания могут быть непосредственно разделены. Использование скользящей контактной линии конкретного типа зависит от практических потребностей.
[0110] Как показано на фиг.2, в том случае, если профильная направляющая 15 имеет небольшую длину, система может снабжаться энергией с помощью тяговой цепи и протянутого кабеля. В этом случае, как показано на фиг.7, L-образная пластина 18, закрывающая тяговую цепь, монтируется на вертикальной профильной направляющей 15 через крепежный элемент 21 пластины, закрывающей тяговую цепь. Тяговая цепь 17 имеет закрепленный конец, вмонтированный в пластину 18, закрывающую тяговую цепь, и подвижный конец, вмонтированный в нижнюю часть блока 12 управления посредством L-образной конструкции. Кабель смонтирован на тяговой цепи 17, и кабель перемещается вместе с тяговой цепью 17 при перемещении блока 12 управления вверх и вниз.
[0111] В тяговом электродвигателе, используемом в системе, применяется серводвигатель 9 переменного тока с инкрементным датчиком положения, и система управления движением во втором блоке управления может точно управлять инспекционным узлом 14 для достижения любого требуемого положения в диапазоне перемещений путем подсчета импульсов.
[0112] Переключатель 2 ограничения положения смонтирован на обоих концах профильной направляющей 15, и блокировочный элемент 19 переключателя ограничения положения (как показано на фиг.3), взаимодействующий с переключателем 2 ограничения положения, смонтированном в задней части первого блока 12 управления. В том случае, если переключатель ограничения положения, запускается с помощью каретки 5 во время скольжения, подача питания будет отключаться и серводвигатель переменного тока будет тормозить, и, таким образом, предотвращая возникновение столкновения в процессе движения.
[0113] На нижнем конце профильной направляющей 15 смонтирован нулевой переключатель 11 в качестве начальной точки работы робота. Перед каждой подачей питания на инспекционный робот, робот сначала автоматически возвращается в исходную точку и затем выполняет назначенную задачу инспекции.
[0114] Профильную направляющую 15 можно легко смонтировать посредством конструкции 3 крепления L-образной направляющей, как показано на фиг.6.
[0115] Как показано на фиг.8, аппаратные и программные средства, которые требуются для управления инспекционным роботом, монтируются в первом блоке 12 управления. Штепсельный разъем, проходящий в стене, можно смонтировать на стенке блока управления для осуществления связи со вторым блоком 29 управления.
[0116] Устройство управления движением, для управления движением серводвигателя 9 переменного тока, и устройство связи для осуществления связи с первым блоком 12 управления, и система 41 дистанционного управления смонтированы во втором блоке 29 управления для того, чтобы достичь управления движением серводвигателя переменного тока и обработку сигналов ретранслятора и обеспечить подачу питания на второй блок управления.
[0117] Инспекционный узел 14 может быть оснащен различными устройствами, такими как инфракрасный тепловой формирователь 39 изображений, камера, работающая в видимом диапазоне, датчик токсичных газов, ультрафиолетовый датчик, датчик напряженности электромагнитного поля, в зависимости от различных требований к обнаружению, чтобы удовлетворить различные требования к обнаружению.
[0118] Подачу питания и осуществление связи системы можно достичь с помощью двух средств, то есть с помощью скользящей контактной линии или тяговой цепи. В том случае, если робот должен осуществлять инспекцию на большом расстоянии, средство скользящей контактной линии и технологию связи по линии электропитания можно использовать для подачи питания и осуществления связи, не используя кабель. В том случае, если робот должен осуществлять инспекцию на коротком расстоянии, можно использовать средство тяговой цепи, в которой подача питания и осуществление связи достигаются с помощью кабеля. В том случае, если используется средство скользящей контактной линии, скользящая контактная линия 4 монтируется на профильной направляющей 15, и токоприемник 6 монтируется на первом блоке 12 управления, который будет находиться в скользящем взаимодействии со скользящей контактной линией 4. В том случае, если используется средство тяговой цепи, пластину тяговой цепи и тяговую цепь можно непосредственно смонтировать на вертикальной направляющей.
[0119] Корпус модуля электромагнитного экранирования, как показано на фиг.9-11, включает в себя корпус 47 и экранирующую накрывающую пластину 46, размещенную на корпусе 47. Экранирующая накрывающая пластина 46 включает в себя металлическую пластину 46-1, гибкую прокладку 46-2 и металлическую фольгу 46-3, которые расположены друг над другом в указанной последовательности снаружи внутрь. Внутреннее пространство корпуса 47 представляет собой полость, и внутренняя стенка корпуса 47 выполнена с уступом 47-3.
[0120] Установочное отверстие сформировано в экранирующей накрывающей пластине 46, и резьбовое отверстие 47-2 выполнено на уступе 47-3. Корпус 47 и экранирующая накрывающая пластина46 жестко соединены с помощью стандартной крепежной детали 48 через установочное отверстие и резьбовое отверстие 47-2.
[0121] Металлическая пластина 46-1 может быть стальной пластиной, алюминиевой пластиной или медной пластиной. Материал гибкой прокладки 46-2 представляет собой гибкий вспененный материал с клейким слоем на обратной стороне. Металлическая фольга 46-3 представляет собой алюминиевую фольгу или медную фольгу, имеющую толщину от 0,01 мм до 0,1 мм с клейким слоем на обратной стороне.
[0122] Материал корпуса 47 представляет собой алюминиевый сплав или медный сплав. Металлическая пластина 46-1, гибкая прокладка 46-2 и металлическая фольга 46-3 имеют прямоугольную форму с одинаковой длиной и шириной, и корпус 47 имеет форму параллелепипеда. Корпус 47 представляет собой конструкцию, выполненную как единое целое и сформированную путем фрезерования цельной металлической заготовки. Корпус 47 включает в себя внешнюю стенку 47-1 корпуса. Установочное отверстие 47-4 штепсельного разъема можно сформировать в корпусе в соответствии с требованиями к внешнему подключению интерфейса печатной платы или электронного компонента, смонтированного внутри корпуса, и установочное отверстие 47-4 штепсельного разъема выполнено с возможностью монтирования штепсельного разъема 68 типа, обеспечивающего электромагнитную совместимость.
[0123] Настоящая заявка в основном состоит из экранирующей накрывающей пластины 46 и корпуса 47. Экранирующая накрывающая пластина 46 является частью, выполненной как одно целое. Перед использованием гибкая прокладка 46-2 и металлическая фольга 46-3 приклеиваются к металлической пластине 46-1 для формирования части, выполненной как одно целое. Экранирующая накрывающая пластина 46 и корпус 47 затем монтируются вместе с помощью стандартного крепежного элемента 48 для образования закрытого пространства с надежным электромагнитным экранированием. При необходимости в экранированную полость можно поместить электронный компонент.
[0124] В случае использования корпуса модуля электромагнитного экранирования, сначала перед его использованием гибкая прокладка приклеивается к металлической пластине, и затем к гибкой прокладке приклеивается металлическая фольга, в результате чего вышеупомянутые три части в собранном виде образуют часть, выполненную как одно целое. В корпусе формируется полость. На стенке корпуса сформирован уступ для обеспечения хороших герметизирующих свойств после монтирования накрывающей пластины. На уступе выполнено резьбовое отверстие для монтирования накрывающей пластины.
[0125] Как показано на фиг.12-14, рамка 49 собирается из первой рамки 49-1 и второй рамки 49-2, которые соединяются посредством сварки, приклеивания или винтов. Прямоугольная канавка, выполненная в виде замкнутого контура, сформирована на второй рамке 49-2, и прокладка 52 из токопроводящей резины приклеивается в прямоугольной канавке второй рамки 49-2 с помощью токопроводящего клея. Вентиляционная ячеистая металлическая пластина 50 и пылезащитный экран 51 на первой и второй рамках вставляются в металлическую рамку 49 для того, чтобы сформировать законченное вентиляционное окно электромагнитного экранирования. Перед сборкой первой и второй рамок вентиляционная металлическая пластина 50 и пылезащитный экран 51 должны устанавливаться на уступы 47-3 двух рамок, как показано на фиг.14.
[0126] Вентиляционное и пылезащитное окно электромагнитного экранирования применяется в экранирующем корпусе, для которого требуется высоко эффективное электромагнитное экранирование и вентиляция. Окно электромагнитного экранирования монтируется в положении, в котором требуется обеспечить отверстие, и благодаря ячеистой металлической конструкции получается хорошее свойство электромагнитного экранирования. Прокладка 52 из токопроводящей резины монтируется на второй рамке, что усиливает герметизирующий эффект между рамкой и корпусом, предотвращает образование зазора между окном экранирования и корпусом, тем самым повышая эффект электромагнитного экранирования.
[0127] Пыль может значительно уменьшить срок службы устройства. Пылезащитный экран 51 позволяет эффективным образом предотвратить накопление пыли в корпусе из-за вентиляция, тем самым повышая срок службы устройства.
[0128] Как показано на фиг.15, шпилька защитного заземления состоит из заземляющей шпильки 55 с двусторонней резьбой и стандартного медного элемента. Заземляющая шпилька 55 с двусторонней резьбой изготовлена из медного сплава и имеет хорошую электропроводность и коррозионную стойкость. Заземляющая шпилька 55 с двусторонней резьбой включает в себя три участка. Фланцевая пластина 60 монтируется на среднем участке, и шпилька с двусторонней резьбой располагается на двух конечных участках. Один конец заземляющей шпильки с двусторонней резьбой механически обработан для придания эллиптической формы или D-образной формы 61, а другой конец заземляющей шпильки с двусторонней резьбой механически обработан для получения центрального отверстия 59, как показано на фиг.16.
[0129] Первая шестигранная гайка 53-1, первая плоская шайба 54-1 и барашковая гайка 56 закручиваются соответственно до конца заземляющей шпильки с двусторонней резьбой, сформированной с центральным отверстием 59. Внешний заземляющий провод может быть подсоединен вручную путем навинчивания барашковой гайки 56. Первая шестигранная гайка 53-1 может обеспечить плоскость, имеющую определенную высоту, и внешний заземляющий провод может прикручиваться между барашковой гайкой 56 и первой плоской шайбой 54-1 путем ручного завинчивания барашковой гайки 56 для того, чтобы сформировать надежное внешнее заземление.
[0130] При использовании, отверстие 57 шкафа, имеющее в поперечном сечении форму усеченного с двух сторон круга или D-образную форму, выполнено в стенке 58 шкафа в соответствии с формой заземляющей шпильки с двусторонней резьбой. Механически обработанный участок 61 заземляющей шпильки 55, который имеет в поперечном сечении форму усеченного с двух сторон круга или D-образную форму, вставляется во внутреннюю часть шкафа, и вторая шестигранная гайка 53-2, вторая плоская шайба 54-2, третья плоская шайба 54-3 и третья шестигранная гайка 53-3, изготовленные из меди, последовательно завинчиваются с внутренней стороны шкафа. Внутренняя вторая шестигранная гайка 53-2 выполняет функции крепления заземляющей шпильки 55, и внешняя третья шестигранная гайка 53-3 перемещается свободным образом, и кабель и т.п. в шкафе, который(е) необходимо заземлить, можно подсоединить к заземляющей шпильке и затянуть путем завинчивания гайки.
[0131] Один конец заземляющей шпильки 55 с двусторонней резьбой подвергается механической обработке для получения центрального отверстия 59, и центральное отверстие 59 используется для зенковки и сплющивания. Конец сплющивается после монтирования барашковой гайки 56, что может полностью предотвратить самопроизвольное откручивание барашковой гайки. Резьбовой участок на другом конце заземляющей шпильки 55 с двусторонней резьбой срезается чтобы сформировать плоскость, которая может быть срезана чтобы сформировать одну плоскость D-образной формы, или может быть срезана чтобы симметрично сформировать две плоскости в форме усеченного с двух сторон круга Стенка 58 шкафа, где монтируется заземляющая шпилька с двусторонней резьбой, снабжена отверстием 57 в шкафу, немного превышающим размер шпильки с двусторонней резьбой, имеющей в поперечном сечении форму усеченного с двух сторон круга или D-образную форму.
[0132] На среднем участке заземляющей шпильки 55 с двусторонней резьбой смонтирована фланцевая пластина 60, имеющая в поперечном сечении форму усеченного с двух сторон круга, которая срезана чтобы сформировать две плоскости, и может использоваться при тугом прикручивании заземляющей шпильки 55 с двусторонней резьбой к шкафу, снабженному круглым отверстием.
[0133] Барашковая гайка 56 или гайка с накаткой используется в качестве гайки ручной затяжки когда заземляющая шпилька 55 с двусторонней резьбой крепко затянута.
[0134] Каждая из заземляющей шпильки 55, первой шестигранной гайки 53-1, второй шестигранной гайки 53-2, третьей шестигранной гайки 53-3, первой плоской шайбы 54-1, второй плоской шайбы 54-2, третьей плоской шайбы 54-3 и барашковой гайки 56 является стандартным элементом, изготовленным из меди.
[0135] Хотя конкретные варианты осуществления настоящей заявки были описаны выше со ссылкой на чертежи, приведенные выше конкретные варианты осуществления не должны интерпретироваться как ограничивающие объем настоящей заявки. Специалисту в данной области техники должно быть понято, что различные модификации или варианты, выполненные на основании технического решения настоящей заявки специалистом в данной области техники без каких-либо затрат творческих усилий, должны подпадать под объем настоящей заявки.






Робототехническая терминальная система (42) содержит профильную направляющую (15), установленную на внутренней стенке, причем подвижный механизм, механизм приведения в движение и инспекционный механизм установлены на профильной направляющей (15); инспекционный механизм содержит опорную головку (13) и инспекционный узел (14), при этом инспекционный механизм устанавливается на подвижном механизме, подвижный механизм приводится в движение с помощью механизма приведения в движение, и подвижный механизм приводит в движение инспекционный механизм для перемещения его вверх и вниз вдоль профильной направляющей (15). Подвижный механизм содержит узел синхронного шкива и синхронный ремень. Обеспечиваются компактность конструкции, быстрая и удобная ее установка, система работает плавно, без необходимости в большей силе трения при перемещении робота, надежно и имеет высокую точность позиционирования, широкий диапазон инспектируемых параметров и высокую степень автоматизации. 27 з.п. ф-лы, 16 ил.
1. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, содержащая систему дистанционного управления,
при этом система дистанционного управления подключена к по меньшей мере одной робототехнической терминальной системе через Интернет, и робототехническая терминальная система содержит профильную направляющую, которая смонтирована на стенке внутри помещения,
при этом подвижный механизм, механизм приведения в движение и инспекционный механизм смонтированы на профильной направляющей; инспекционный механизм содержит опорную головку и инспекционный узел, инспекционный механизм смонтирован на подвижном механизме, подвижный механизм приводится в движение с помощью механизма приведения в движение, подвижный механизм позволяет инспекционному механизму перемещаться вверх и вниз вдоль профильной направляющей, и, совместно с работой опорной головки, достигается инспекция внутреннего оборудования, подлежащего инспекции в большом диапазоне параметров, и
при этом подвижный механизм содержит узел синхронного шкива и синхронный ремень, причем узел синхронного шкива содержит корпуса синхронных шкивов и синхронные шкивы, корпуса синхронных шкивов смонтированы на верхнем конце и нижнем конце профильной направляющей, соответственно, синхронные шкивы смонтированы в корпусах синхронных шкивов, соответственно, и синхронный ремень вращается вокруг синхронных шкивов.
2. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.1, в которой средство для подачи питания и осуществления связи с робототехнической терминальной системой выбрано из любого из следующих трех случаев:
первый случай: подача питания и осуществление связи выполняются посредством тяговой цепи;
второй случай: подача питания выполняется посредством скользящей контактной линии, предназначенной для осуществления скользящего контакта, а осуществление связи выполняется посредством линии электропитания; и
третий случай: подача питания выполняется посредством скользящей контактной линии, а осуществление связи выполняется с помощью излучающего кабеля или микроволновой технологии.
3. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.1, в которой система дистанционного управления соединена с робототехнической терминальной системой через специальный силовой кабель.
4. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.1, в которой механизм приведения в движение приводит в движение инспекционный механизм для перемещения вверх и вниз, причем механизм приведения в движение содержит серводвигатель переменного тока и редуктор скорости, серводвигатель переменного тока смонтирован вместе с синхронным шкивом через редуктор скорости; редуктор скорости закреплен на корпусе синхронного шкива в нижней части профильной направляющей.
5. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.1, в которой
инспекционный механизм содержит первый блок управления, причем первый блок управления осуществляет связь с, управляет и подает питание на инспекционный узел и опорную головку; первый блок управления смонтирован на каретке, и каретка неподвижно присоединена к синхронному ремню, каретка смонтирована на профильной направляющей с возможностью обеспечения скользящего контакта, синхронный ремень позволяет перемещение каретки вверх и вниз вдоль профильной направляющей, и опорная головка смонтирована на первом блоке управления, первый блок управления также выполняет функции консоли; и инспекционный узел смонтирован на опорной головке и
робототехническая терминальная система дополнительно содержит второй блок управления, смонтированный рядом с направляющей, причем второй блок управления осуществляет связь с первым блоком управления и подает питание в первый блок управления; и второй блок управления дополнительно управляет движением серводвигателя переменного тока.
6. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой
в том случае, если робот снабжается энергией и осуществляет связь посредством тяговой цепи,
контроллер инспекционного устройства, видеосервер, первый коммутатор и первый модуль электропитания смонтированы в первом блоке управления, видеосервер осуществляет связь, соответственно, с инфракрасным тепловым формирователем изображений и оптической камерой, и первый коммутатор осуществляет связь с видеосервером, первый коммутатор осуществляет связь с контроллером инспекционного устройства, и контроллер инспекционного устройства осуществляет связь с опорной головкой, инфракрасным тепловым формирователем изображений и оптической камерой, соответственно, и первый модуль электропитания подает питание в различные питаемые устройства в первом блоке управления; и
контроллер движения серводвигателя переменного тока, сервопривод, второй модуль электропитания, второй коммутатор и первый фотоэлектрический преобразователь смонтированы во втором блоке управления, первый фотоэлектрический преобразователь осуществляет связь со вторым коммутатором, и второй коммутатор осуществляет связь с контроллером движения, контроллер движения осуществляет связь с сервоприводом, первый фотоэлектрический преобразователь осуществляет связь с системой дистанционного управления, контроллер движения осуществляет связь с нулевым переключателем, первым переключателем ограничения положения и вторым переключателем ограничения положения, сервопривод осуществляет связь с серводвигателем переменного тока, и второй модуль электропитания подает питание в различные электрические модули во втором блоке управления и подает питание в первый блок управления.
7. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой в том случае, если система снабжается энергией посредством тяговой цепи, отдельные кабели предусмотрены, соответственно, для подачи питания и осуществления связи первого блока управления, причем кабель электропитания выходит из второго блока управления, кабель связи подключен к коммутатору во втором блоке управления; пластина, закрывающая тяговую цепь, и тяговая цепь смонтированы на профильной направляющей, пластина, закрывающая тяговую цепь, закреплена на профильной направляющей посредством крепежного элемента пластины, закрывающей тяговую цепь, и кабель электропитания и кабель связи, размещаются на тяговой цепи, и тяговая цепь защищает кабели.
8. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой
в том случае, если робот снабжается энергией посредством скользящей контактной линии и осуществляет связь посредством линии электропитания,
контроллер инспекционного устройства, видеосервер, первый коммутатор, первый модем связи по линии электропитания и первый модуль электропитания смонтированы в первом блоке управления, видеосервер осуществляет связь, соответственно, с инфракрасным тепловым формирователем изображений и оптической камерой на инспекционном узле, и первый коммутатор осуществляет связь с видеосервером, первый коммутатор осуществляет связь с контроллером инспекционного устройства, и контроллер инспекционного устройства осуществляет связь с опорной головкой, инфракрасным тепловым формирователем изображений и оптической камерой, соответственно, и первый модуль электропитания подает питание в различные питаемые устройства в первом блоке управления;
контроллер движения серводвигателя переменного тока, сервопривод, второй модуль электропитания, второй коммутатор и первый фотоэлектрический преобразователь и второй модем связи по линии электропитания смонтированы во втором блоке управления, первый фотоэлектрический преобразователь осуществляет связь со вторым коммутатором, и второй коммутатор осуществляет связь с контроллером движения, контроллер движения осуществляет связь с сервоприводом, первый фотоэлектрический преобразователь осуществляет связь с системой дистанционного управления, контроллер движения осуществляет связь с нулевым переключателем, первым переключателем ограничения положения и вторым переключателем ограничения положения, сервопривод осуществляет связь с серводвигателем переменного тока, и второй модуль электропитания подает питание в различные электрические модули второго блока управления, и подает питание в первый блок управления; и
первый модем связи по линии электропитания имеет один конец, соединенный с первым коммутатором, и другой конец, соединенный с одним концом второго модема связи по линии электропитания, и другой конец второго модема связи по линии электропитания соединен со вторым коммутатором.
9. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой в том случае, если система снабжается энергией посредством скользящей контактной линии, средство связи, применяемое инспекционным механизмом при выполнении управления, представляет собой связь по линии электропитания; токоприемник смонтирован на первом блоке управления с помощью крепежной пластины токоприемника, место крепления скользящей контактной линии смонтировано на профильной направляющей, и скользящая контактная линия смонтирована на месте крепления скользящей контактной линии; токоприемник имеет две скользящие контактные пластины, обеспечивающие контакт со скользящей контактной линией; два полюса токоприемника подсоединены к двум концам первого модема связи по линии электропитания первого блока управления и также подсоединены к двум концам первого модуля электропитания первого блока управления.
10. Интеллектуальная инспекционная робототехническая система на направляющей и предназначенная для работы в помещении, по п.8, в которой два полюса скользящей контактной линии подключены к модему связи по линии электропитания во втором блоке управления и также подсоединены к двум концам второго модуля электропитания второго блока управления.
11. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.9, в которой
скользящая контактная линия содержит медный проводник и изоляционное покрытие, причем медный проводник изготовлен в виде полой трубки,
токоприемник имеет проводники, количество которых совпадает с количеством проводников скользящей контактной линии, которая обеспечивает соединение с проводниками скользящей контактной линии в виде скользящего контакта.
12. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой робототехническая терминальная система дополнительно содержит механизм ограничения положения, и механизм ограничения положения содержит переключатели ограничения положения, смонтированные на двух концах профильной направляющей, блокировочный элемент переключателя ограничения положения смонтирован на задней поверхности первого блока управления, которая находится в контакте с профильной направляющей, и блокировочный элемент переключателя ограничения положения находится во взаимодействии с переключателями ограничения положения для предотвращения столкновения из-за аварийного отключения электроэнергии.
13. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.6 или 8, в которой первый фотоэлектрический преобразователь второго блока управления преобразует все обнаруженные сигналы изображения и видеосигналы и сигналы управления в оптические сигналы и затем передает оптические сигналы в систему дистанционного управления через оптическое волокно, которая реализует обработку обнаруженного содержания относительно всей системы и выполняет операцию дистанционного управления в отношении инспекции и состояния движения.
14. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.4, в которой датчик положения серводвигателя переменного тока подключен к сервоприводу, и каретка на направляющей перемещает инспекционный узел в точно определенное положение для выполнения инспекции путем подсчета импульсов.
15. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.4, в которой серводвигатель переменного тока оснащен электромагнитным тормозом, который позволяет торможение в случае отключения питания.
16. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.1, в которой синхронный ремень, который взаимодействует с синхронными шкивами, смонтирован в паз профильной направляющей.
17. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой инспекционный узел содержит инфракрасную камеру, камеру, работающую в видимом диапазоне, датчик пожарной сигнализации, датчик напряженности электромагнитного поля и ультрафиолетовый датчик.
18. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.4, в которой редуктор скорости крепится к корпусу синхронного шкива, расположенному в нижней части профильной направляющей, с помощью фланцевого узла.
19. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.7, в которой пластина, закрывающая тяговую цепь, представляет собой L-образный алюминиевый профиль, и L-образный алюминиевый профиль и профильная направляющая образуют направляющий паз для фиксации и направления тяговой цепи.
20. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.1, в которой на нижнем конце профильной направляющей смонтирован нулевой переключатель в качестве исходной точки работы робота, перед каждой подачей питания на инспекционного робота, робот сначала автоматически возвращается в исходную точку и затем выполняет назначенную задачу инспекции.
21. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.6, в которой второй блок управления снабжает энергией и служит в качестве связного ретранслятора для всего терминала робототехнической системы, управляет движением серводвигателя переменного тока и преобразует сигнал управления связью в фотоэлектрический сигнал для обеспечения удаленной связи.
22. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.6 или 8, в которой система дистанционного управления содержит второй фотоэлектрический преобразователь и верхний компьютер, и сигналы связи подвергаются фотоэлектрическому преобразованию с помощью второго фотоэлектрического преобразователя для достижения связи между системой дистанционного управления и робототехнической терминальной системой.
23. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой корпус модуля электромагнитного экранирования предусмотрен в каждом из первого блока управления и второго блока управления, и корпус модуля электромагнитного экранирования вмещает в себя плату управления.
24. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.23, в которой корпус модуля электромагнитного экранирования содержит корпус и экранирующую накрывающую пластину, размещенную на корпусе, причем экранирующая накрывающая пластина содержит металлическую пластину, гибкую прокладку и металлическую фольгу, которые расположены друг над другом в указанной последовательности снаружи внутрь, внутреннее пространство корпуса представляет собой полость, и внутренняя стенка корпуса выполнена с уступом.
25. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.24, в которой установочное отверстие выполнено в экранирующей накрывающей пластине, и резьбовое отверстие выполнено в уступе, корпус и экранирующая накрывающая пластина неподвижно соединены с помощью стандартного крепежного элемента, проходящего через установочное отверстие и резьбовое отверстие.
26. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой второй блок управления выполнен с вентиляционным и пылезащитным окном электромагнитного экранирования на боковой стороне, причем вентиляционное и пылезащитное окно электромагнитного экранирования содержит первую рамку и вторую рамку, при этом каждая из двух рамок выполнена с уступом в виде замкнутого контура для фиксации вентиляционной металлической пластины; вторая рамка выполнена с прямоугольной неглубокой канавкой в форме замкнутого контура, прокладка из токопроводящей резины приклеивается в прямоугольной канавке второй рамки с помощью токопроводящего клея, ячеистая вентиляционная металлическая пластина и пылезащитный экран вставляются в верхнюю металлическую рамку и нижнюю металлическую рамку в указанной последовательности.
27. Интеллектуальная инспекционная робототехническая система на направляющей, предназначенная для работы в помещении, по п.5, в которой корпус блока второго блока управления прикрепляется к земле с помощью шпильки защитного заземления, причем шпилька защитного заземления содержит заземляющую шпильку с двусторонней резьбой, шестигранную гайку, плоскую шайбу и гайку ручной затяжки, и на средней части заземляющей шпильки с двусторонней резьбой монтируется фланец, и каждая из двух концевых частей снабжена резьбой, причем одна из двух концевых частей заземляющей шпильки с двусторонней резьбой выполнена с центральным отверстием для зенковки и сплющивания, и другая из двух концевых частей заземляющей шпильки с двусторонней резьбой подвергнута механической обработке и имеет в поперечном сечении форму усеченного с двух сторон круга или D-образную форму; шестигранная гайка, плоская шайба и гайка ручной затяжки последовательно завинчиваются на концевой части, снабженной центральным отверстием, заземляющей шпильки с двусторонней резьбой.
| CN 104020768 A, 03.09.2014 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| CN 101837926 A, 22.09.2010 | |||
| CN 102736623 A, 17.10.2012 | |||
| CN 101599212 A, 09.12.2009 | |||
| CN 103022932 A, 03.04.2013 | |||
| CN 101710167 A, 19.05.2010 | |||
| CN 202197032 U, 18.04.2012 | |||
| CN 201629815 U, 10.11.2010 | |||
| Комбинированный способ разрушения негабаритов железных руд | 1961 |
|
SU140773A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

