Изобретение относится к робототехнике, а именно к роботам мобильным робототехнических комплексов, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором.
Известен робот мобильный, входящий в состав мобильного робототехнического комплекса по патенту МПК B25J5/00, RU № 2364500 С2, Бюл. №23 от 20.08.2009. Владелец патента открытое акционерное общество «КОВРОВСКИЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАВОД» (ОАО «КЭМЗ») (RU). Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает робот мобильный, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. Мобильный робототехнический комплекс снабжен выносной системой видеонаблюдения. Робот мобильный дополнительно включает комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее к кормовой части транспортного средства робота мобильного на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце. При этом робот мобильный включает в себя двигатель с приводом, установленный на оси, направляющий элемент, средства питания, управления, и информационного обеспечения, а также раму.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование системы, что в свою очередь ведет к невозможности осуществления расширения функциональных возможностей.
Наиболее близким по технической сущности является робот мобильный по патенту РФ №2 824 025/опубл. 31.07.2024 Бюл. №22, по заявке № 2023123000, от 04.09.2023 - авторы Литвиненко А. М., Крылов Ю. М. Робот мобильный содержит раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме, при этом рама выполнена в виде швеллеров, соединенных друг с другом своими боковыми сторонами уступами, образованными выдвижением крайних швеллеров в разные стороны относительно среднего швеллера, при этом один из крайних швеллеров соединен с осью упомянутого привода, а на другом крайнем швеллере установлена поворотная ось направляющего колеса, связанная с приводом ее поворота.
Недостатком данного робота является относительно большие габариты, вызванные наличием мачты телекамеры.
Изобретение направлено на уменьшение габаритов.
Это достигается тем, что робот мобильный, содержащий раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, в частности телекамеры, размещенные на мачте, мачта телекамеры выполнена в виде четырех барабанов с намотанными на них лентами, барабаны снабжены приводами и установлены на раме, ленты снабжены профильными направляющими, причем свободные концы лент с помощью шарниров подсоединены к платформе, на которой установлены телекамеры.
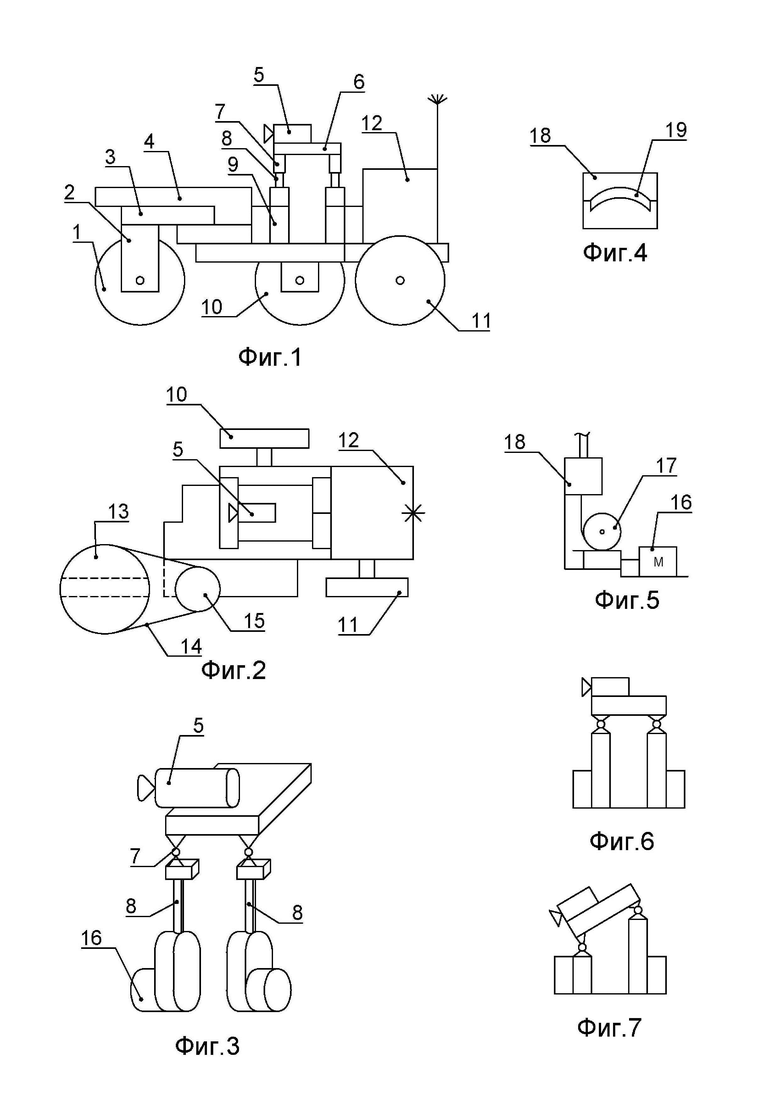
Конструкция робота по предлагаемому изобретению поясняется чертежом, где на Фиг. 1 показан робот мобильный вид сбоку, на Фиг. 2 - вид сверху, на Фиг. 3 схематично показаны два из четырех приводов выдвижения мачты, на Фиг. 4 - выходные обоймы в поперечном разрезе подъемных лент, на Фиг.5 схематично показано структура одного из четырех приводов выдвижения лент, на Фиг.6 показано горизонтальное состояние платформы, на Фиг. 7 показано наклонное состояние платформы.
Робот включает в себя направляющее колесо 1, установленное в вилке 2. Вилка 2 поворачивается посредством привода поворота 3, который установлен на уголке 4. Имеется телекамера 5, или их несколько, установленных на платформе 6. К платформе 6 снизу с помощью шарниров 7 подсоединены ленты 8 приводов 9. Имеется также боковое колесо 10, тяговое колесо 11, блок управления 12. Привод поворота 3 включает в себя шкив 13 с гибким элементом 14 и двигателем 15. Каждый из четырех приводов выдвижения лент включает в себя двигатели 16, редуктор, например червячный, с барабаном 17, на который намотаны ленты 8. Ленты 8 пропущены через обоймы 18, в которых выполнены щели 19, которые придают лентам дугообразную форму для повышения жесткости.
Робот мобильный функционирует следующим образом. Вначале оператор дает дистанционную команду с пульта управления для начала работы робота мобильного. Далее производится самодиагностика всех модулей робота и по беспроводному интерфейсу данные выводятся на экран оператору. При получении команды вперед, воспринимаемой антенной, привод приводит во вращение тяговое колесо 11, робот начинает движение. Устойчивому состоянию способствует боковое колесо 10. При изменении направления движения команда подается на двигатель 15 привода поворота 3, который осуществляет поворот направляющего колеса 1. Когда ленты 8 полностью намотаны на барабаны 17, что обеспечивает минимальную высоту робота и возможность его прохода под нависающим препятствием. При необходимости качественного обзора местности подается команда на двигатели 16 барабанов 17, которые осуществляют выдвижение лент 8 через щели 19 обойм 18. При подаче команд на все четыре привода происходит увеличение высоты подъема телекамер 5. При необходимости бокового, переднего или заднего наклонов телекамеры подается команда только на соответствующие два из четырех приводов. Случай бокового наклона показан на Фиг.7.
Технико-экономическим преимуществом является возможность уменьшения его габаритов по высоте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационный мобильный робот | 2024 |
|
RU2839732C1 |
| Мобильный информационный робот | 2024 |
|
RU2839879C1 |
| Робот мобильный | 2024 |
|
RU2839641C1 |
| Мобильный робот | 2024 |
|
RU2841236C1 |
| Информационный мобильный робот | 2024 |
|
RU2837077C1 |
| Мобильный робот | 2024 |
|
RU2841234C1 |
| Мобильный робот | 2023 |
|
RU2824025C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| Колесо мобильного робота | 2024 |
|
RU2835523C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
Изобретение относится к робототехнике, а именно к роботам мобильным робототехнических комплексов, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором. Робот мобильный содержит раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, а именно телекамеры, размещенные на мачте. Мачта телекамер выполнена в виде четырех барабанов с намотанными на них лентами. Барабаны снабжены приводами и установлены на раме. Ленты снабжены профильными направляющими. Свободные концы лент с помощью шарниров подсоединены к платформе, на которой установлены телекамеры. Обеспечивается уменьшение габаритов мобильного робота по высоте. 7 ил. 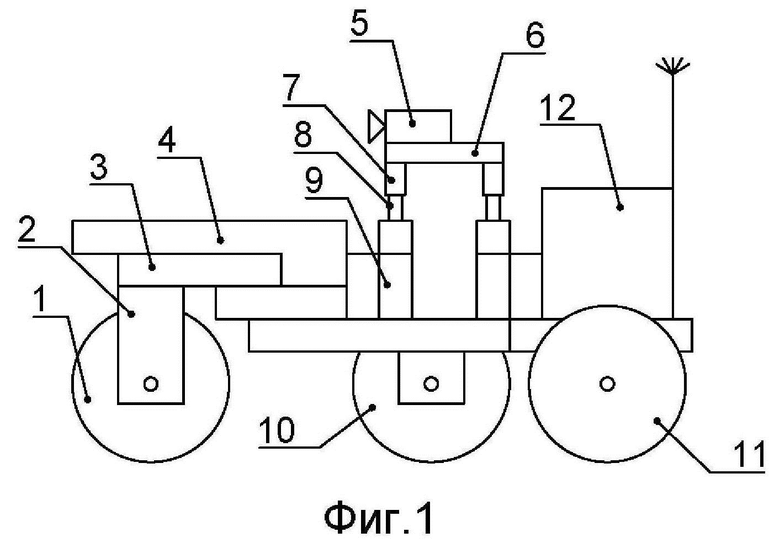
Робот мобильный, содержащий раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения - телекамеры, размещенные на мачте, мачта телекамер выполнена в виде четырех барабанов с намотанными на них лентами, барабаны снабжены приводами и установлены на раме, ленты снабжены профильными направляющими, причем свободные концы лент с помощью шарниров подсоединены к платформе, на которой установлены телекамеры.
| Мобильный робот | 2023 |
|
RU2824025C1 |
| WO 2021113726 A1, 10.06.2021 | |||
| CN 111211813 A, 29.05.2020 | |||
| ПЕННЫЙ АППАРАТ | 0 |
|
SU169071A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| CN 202045634 U, 23.11.2011. | |||

