ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к технической области минимально инвазивной сосудистой хирургии и, более конкретно, к интервенционной автоматизированной операционной системе.
УРОВЕНЬ ТЕХНИКИ
[0002] Малоинвазивная интервенционная терапия сердечно-сосудистых и цереброваскулярных заболеваний является основным средством лечения сердечно-сосудистых и цереброваскулярных заболеваний. По сравнению с традиционной хирургической операцией, она имеет очевидные преимущества: небольшой надрез, короткое время послеоперационного восстановления и т.п. Интервенционная операция при сердечно-сосудистых и цереброваскулярных заболеваниях - это процесс, при котором, врач вручную вводит катетер, направляющую иглу, стент и другие инструменты для завершения лечения.
[0003] Интервенционная хирургия имеет следующие недостатки: во-первых, в процессе операции DSA (цифровая субтракционная ангиография) излучает рентгеновские лучи, физическая сила врача быстро снижается, внимание и стабильность также снижаются, точность операции снижается, возникают несчастные случаи, такие как травма эпителия, перфорация, разрыв кровеносных сосудов и тому подобное, вызванные неправильным усилием при нажатии, что вызывает риск для жизни пациента. Во-вторых, кумулятивный ущерб от длительного ионизирующего излучения может значительно увеличить вероятность того, что врачи заболеют лейкемией, раком и катарактой. Явление накопления лучей в процессе интервенционной операции становится проблемой, которая наносит ущерб профессиональной жизни врачей и ограничивает развитие интервенционной операции.
[0004] Благодаря роботизированным технологиям робот может завершить процесс интервенционной операции без ручного участия., и эти проблемы эффективно решаются. Очевидно, что время роботизированной операции необходимо вручную контролировать ход операции. Весь процесс интервенционной операции завершается взаимным сотрудничеством различных роботов и создание интервенционной автоматизированной операционной системы является будущим направлением развития.
[0005] Однако в настоящее время интервенционные операции имеют следующие проблемы: (1) В интервенционных операциях все процедуры требуют участия врача, врач находится под большим давлением, и на него возлагаются большие задачи, начиная с процесса пункции, интраоперационного контроля направляющей проволоки катетера, транспортировки к пациенту, доставки расходных материалов, введения контрастного вещества, замены хирургических инструментов, анализа изображений и тому подобное; (2) Врач долгое время носит свинцовый халат и получает серьезные повреждения скелета и мышц тела; (3) Врачи получают вред от DSA-излучения в течение длительного времени, что оказывает серьезное влияние на здоровье; (4) Использование камеры катетера происходит часто, и очистка часто проблематична; (5) Транспортировка к пациентам часто требует больше человеческих ресурсов; (6) Точность ручного управления направляющей проволокой катетера не высока, эффективность работы не высока и т.п.
[0006] Таким образом, способ обеспечения интервенционной автоматизированной операционной системы является проблемой, которую необходимо решить специалистам в данной области.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Раскрытие направлено на решение, по крайней мере в некоторой степени, одной из вышеупомянутых проблем в предшествующем уровне техники
[0008] С этой целью объектом раскрытия является предложение интервенционной автоматизированной операционной системы, решающей вышеупомянутые задачи 1-3 и 6.
[0009] Обеспечивается интервенционная автоматизированная операционная система, которая включает в себя катетерную камеру, катетерная камера представляет собой зону интервенционной хирургии, имеющую катетерное ложе внутри; камеру управления, камера управления расположена рядом с катетерной камерой, и смотровое окно расположено между катетерной камерой и камерой управления; робота, катетерная камера содержит интервенционный хирургический робот, главный управляющий робот, робот для пункции, робот для замены катетера и направляющей проволоки, которые взаимодействуют друг с другом; устройство DSA и устройство введения контрастного вещества расположены на ложе катетера; устройство мониторинга расположено в камере управления и связано с роботом, устройством DSA и устройством введения контрастного вещества, и используется для отображения информации каждого устройства и робота, синхронного обновления в реальном времени и наблюдения за врачом; и контроллер расположен в камере управления и используется для человеко-машинного взаимодействия между врачом и роботом.
[0010] Согласно технической схеме, по сравнению с уровнем техники, изобретение раскрывает интервенционную автоматизированную операционную систему, катетерная камера и камера управления выполнены таким образом, чтобы располагаться близко, множество роботов с различными функциями, работающих в согласованном режиме, расположены в катетерной камере, устройство DSA и устройство введения контрастного вещества расположены на ложе катетера и согласованы для выполнения операции, операция, по меньшей мере, включает диагностику изображения, пункцию, введение направляющей проволоки катетера, замены направляющей проволоки катетера, перемещения направляющей проволоки катетера, ангиографию и т.п., точность операции повышается, устройство мониторинга для контроля различной информации о состоянии и контроллер человеко-машинного взаимодействия между врачом и роботом расположены в камере управления, так что цель интервенционной автоматизированной операции достигается посредством комбинации роботов, решаются проблемы высокого давления и тяжелой работы оператора интервенционной операции, врачу не нужно носить свинцовую одежду в камере управления в течение длительного времени, тем временем, вред от получения излучения DSA в течение длительного времени предотвращается, и влияние интервенционной операции на здоровье врача уменьшается.
[0011] Кроме того, рядом с катетерной камерой предусмотрена палата для отдыха пациента.
[0012] Кроме того, автоматическая тележка для перемещения перемещается между палатой и катетерной камерой и используется для автоматического перемещения пациента. Проблема 5 решена, и для транспортировки пациента не требуется больше человеческих ресурсов.
[0013] Кроме того, в палате закреплен пост для зарядки тележки для перемещения, которая используется для зарядки автоматической тележки для перемещения.
[0014] Кроме того, робот дополнительно включает в себя робота доставки расходных материалов, который записывает информацию о хирургических расходных материалах для доставки хирургических расходных материалов в катетерную камеру, которая коммуникативно связана с устройством мониторинга и контроллером.
[0015] Кроме того, робот дополнительно включает робота быстрой зарядки, робот быстрой зарядки коммуникативно связан с множеством роботов для замены разряженных батарей
[0016] Кроме того, зона зарядки разраженных батарей расположена снаружи катетерной камеры, а в зоне зарядки предусмотрено место для зарядки робота быстрой зарядки.
[0017] Робот для очистки находится в связи с контроллером и используется для автоматической очистки катетерной камеры после завершения операции. Решается проблема 4, не требуется частое очищение катетерной камеры рабочей силой, повышается эффективность очистки.
[0018] Кроме того, устройство мониторинга включает в себя множество экранов, поддерживаемых опорами.
[0019] Кроме того, роботы выполнены с приоритетом полномочий, главный управляющий робот имеет наибольшие полномочия, являясь управляющим при выполнении операции и используется для диагностики изображений и инструктирования других роботов для согласованной работы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] Для более наглядной иллюстрации вариантов осуществления раскрытия или технических решений в предшествующем уровне техники, ниже будут кратко описаны чертежи, используемые в описании вариантов осуществления или предшествующего уровня техники, очевидно, что чертежи в следующем описании являются только вариантами осуществления раскрытия, и для специалистов в данной области другие чертежи могут быть получены в соответствии с представленными чертежами без творческих усилий.
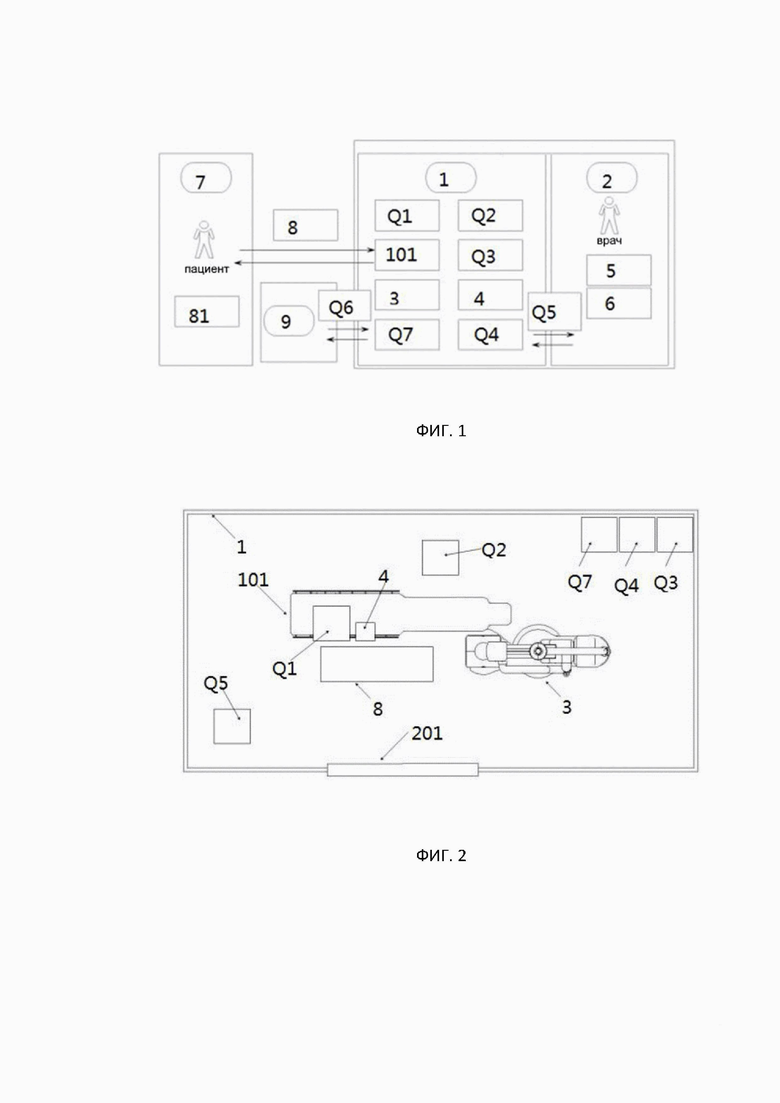
[0021] На ФИГ. 1 показан общий вид системы интервенционной автоматизированной операционной системы.
[0022] На ФИГ. 2 показан вид интервенционной автоматизированной операционной системы внутри катетерной камеры.
[0023] На ФИГ. 3 показана блок-схема интервенционной автоматизированной операционной системы.
[0024] ФИГ. 4 представляет собой принципиальную схему главного управляющего робота.
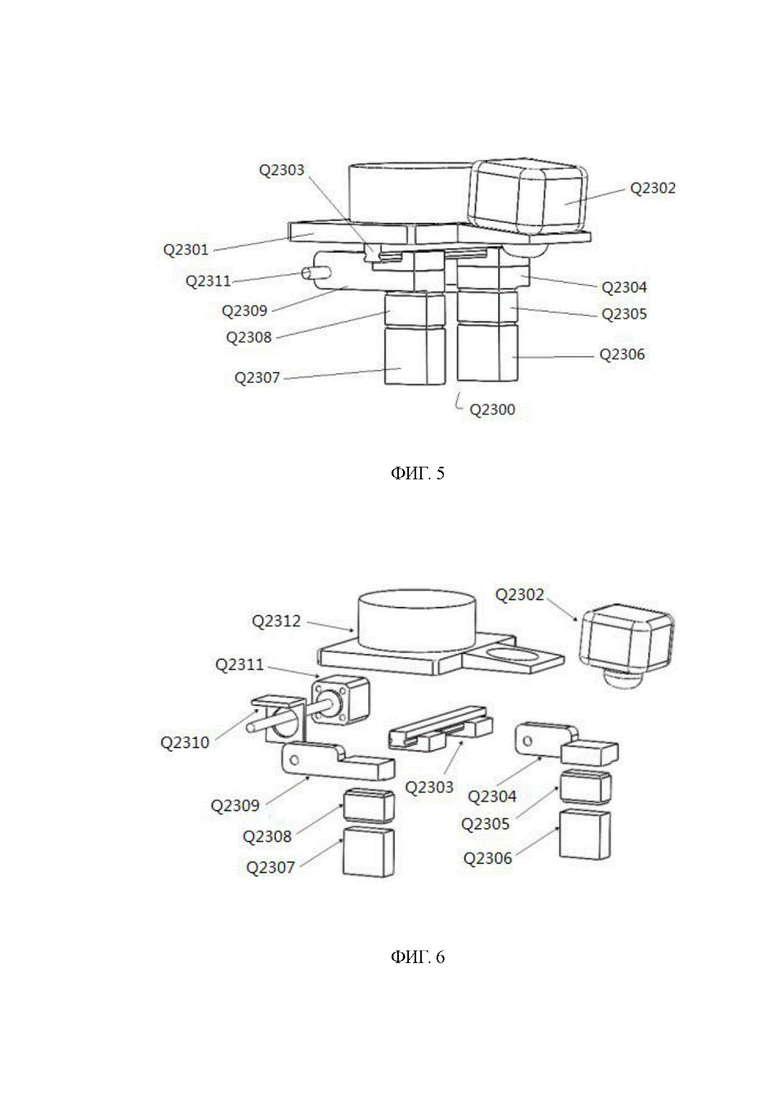
[0025] На ФИГ. 5 показана принципиальная структурная схема пальцевого устройства главного управляющего робота.
[0026] На ФИГ. 6 показан покомпонентный вид пальцевого устройства главного управляющего робота.
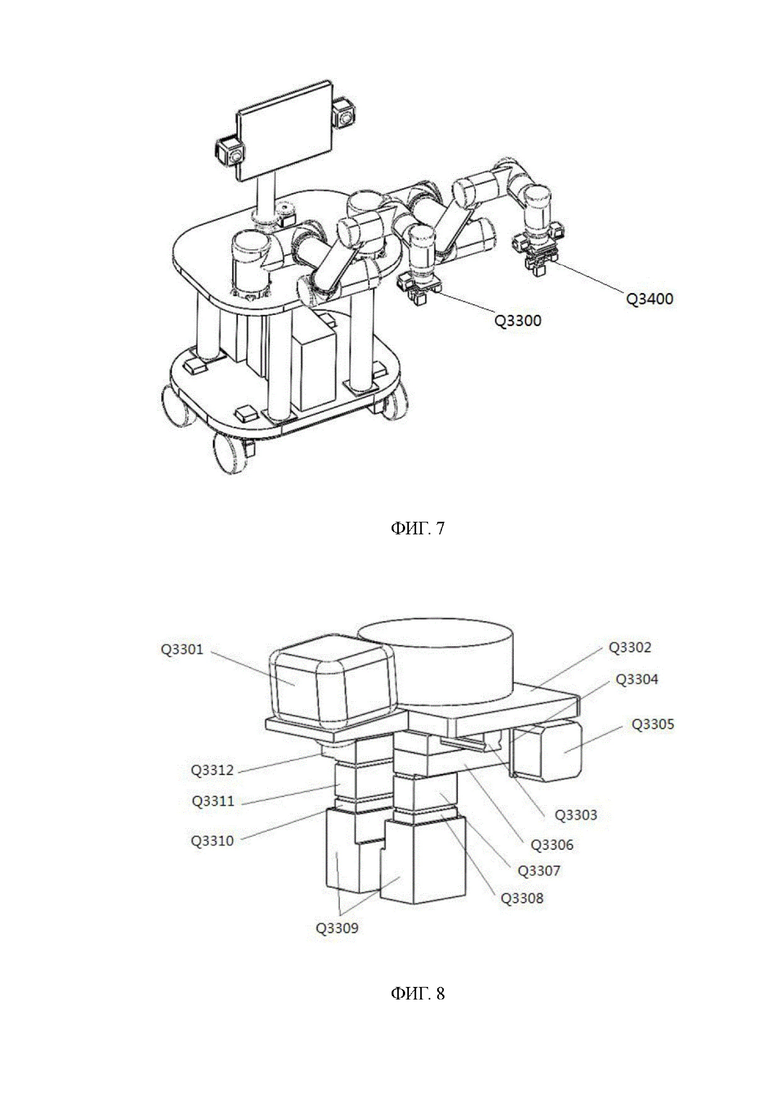
[0027] ФИГ. 7 представляет собой принципиальную схему робота для пункций.
[0028] ФИГ. 8 представляет собой принципиальную схему первого пальцевого устройства робота для пункций.
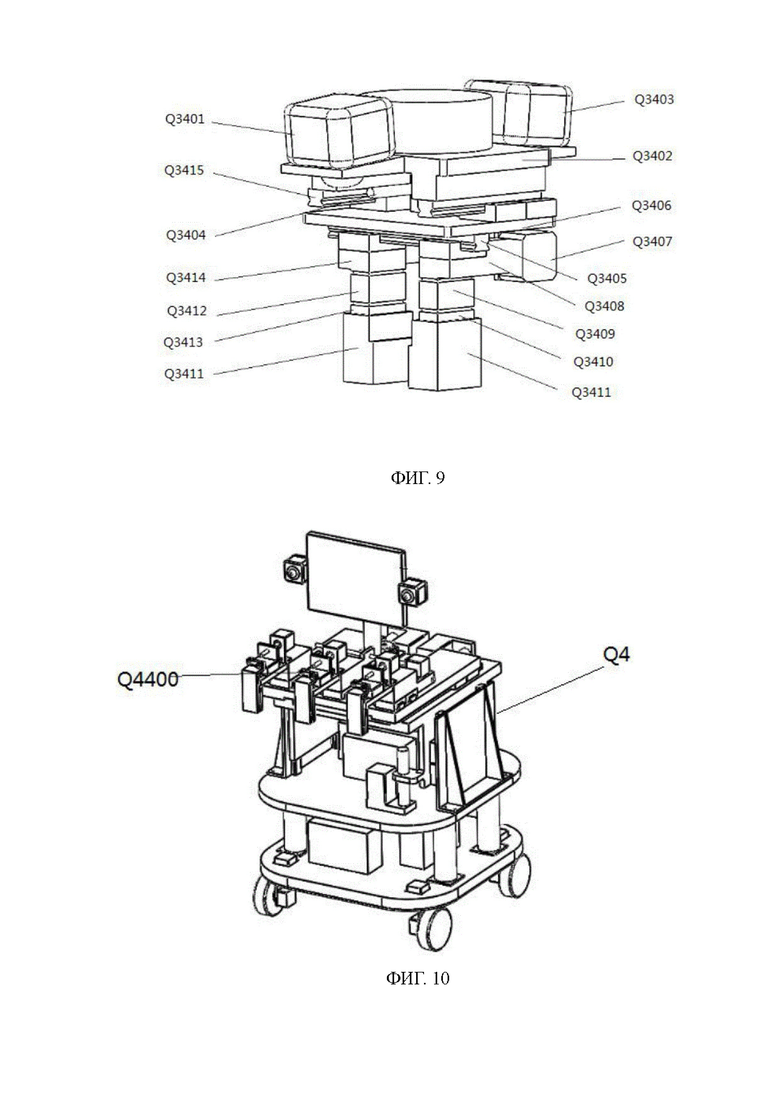
[0029] ФИГ. 9 представляет собой принципиальный вид второго пальцевого устройства робота для пункции.
[0030] ФИГ. 10 представляет собой принципиальную схему робота для замены катетера и направляющей проволоки.
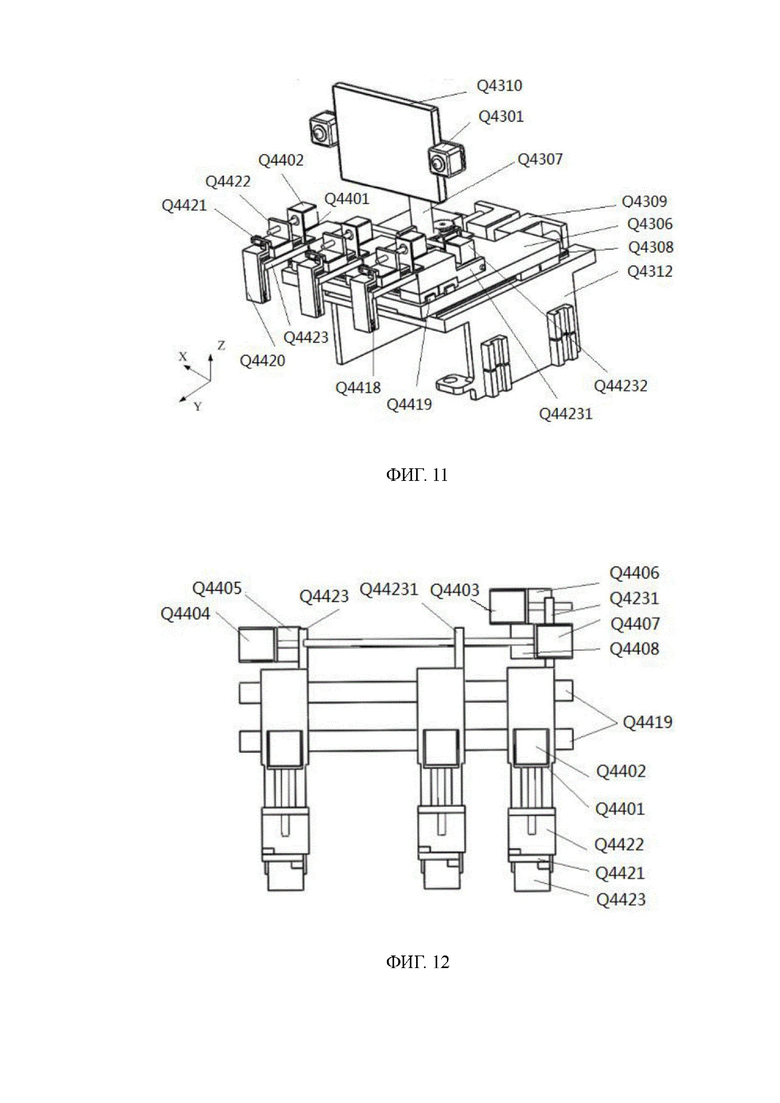
[0031] ФИГ. 11 представляет собой принципиальную структурную схему звено руки и головной части робота для замены катетера и направляющей.
[0032] ФИГ. 12 - вид сверху звена руки робота для замены катетера и направляющей проволоки.
[0033] ФИГ. 13 - схематический вид катетера для замены направляющей проволоки.
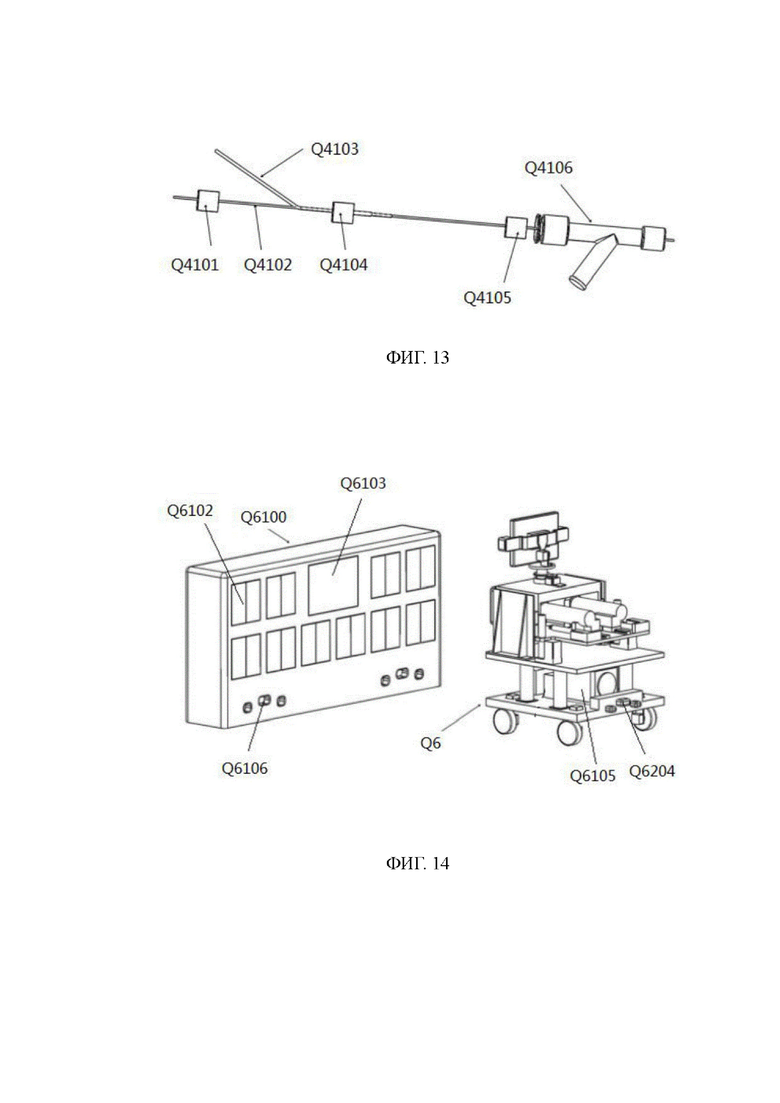
[0034] ФИГ. 14 - принципиальная структурная схема робота для быстрой зарядки.
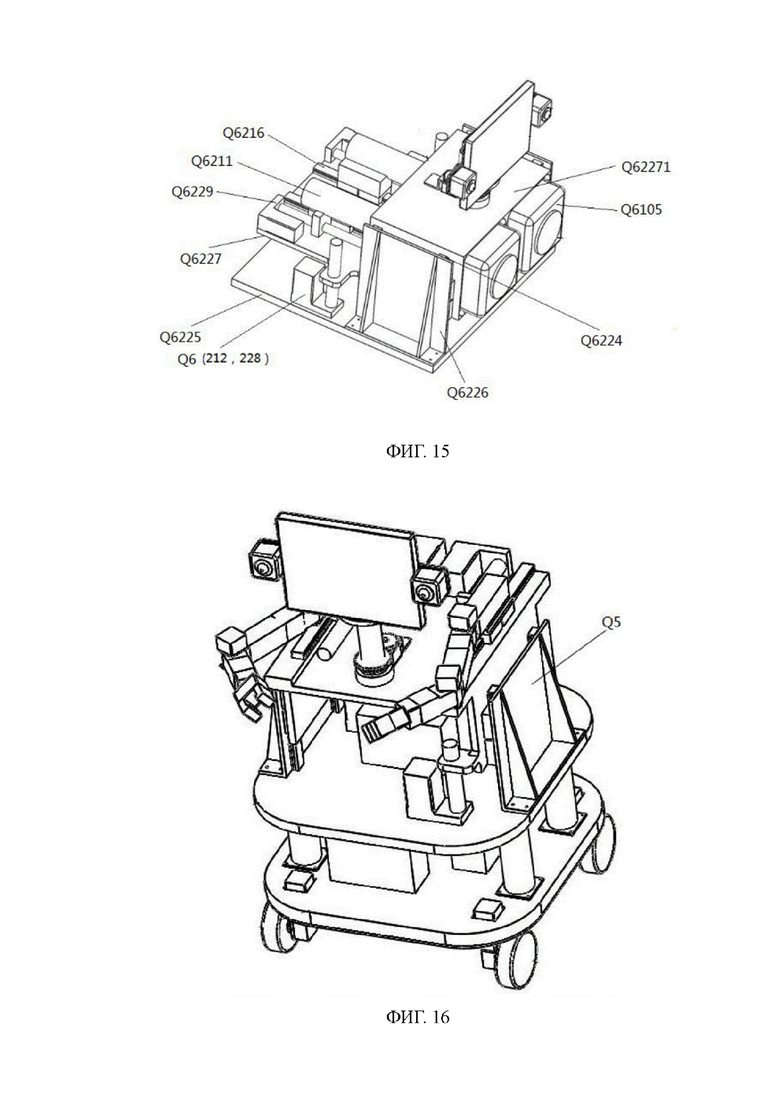
[0035] ФИГ. 15 - принципиальный структурный вид зажимного и толкающего механизма робота для быстрой зарядки.
[0036] ФИГ. 16 представляет собой структурную схему робота для доставки расходных материалов.
[0037] ФИГ. 17 - схематический структурный вид узла руки робота для доставки расходных материалов.
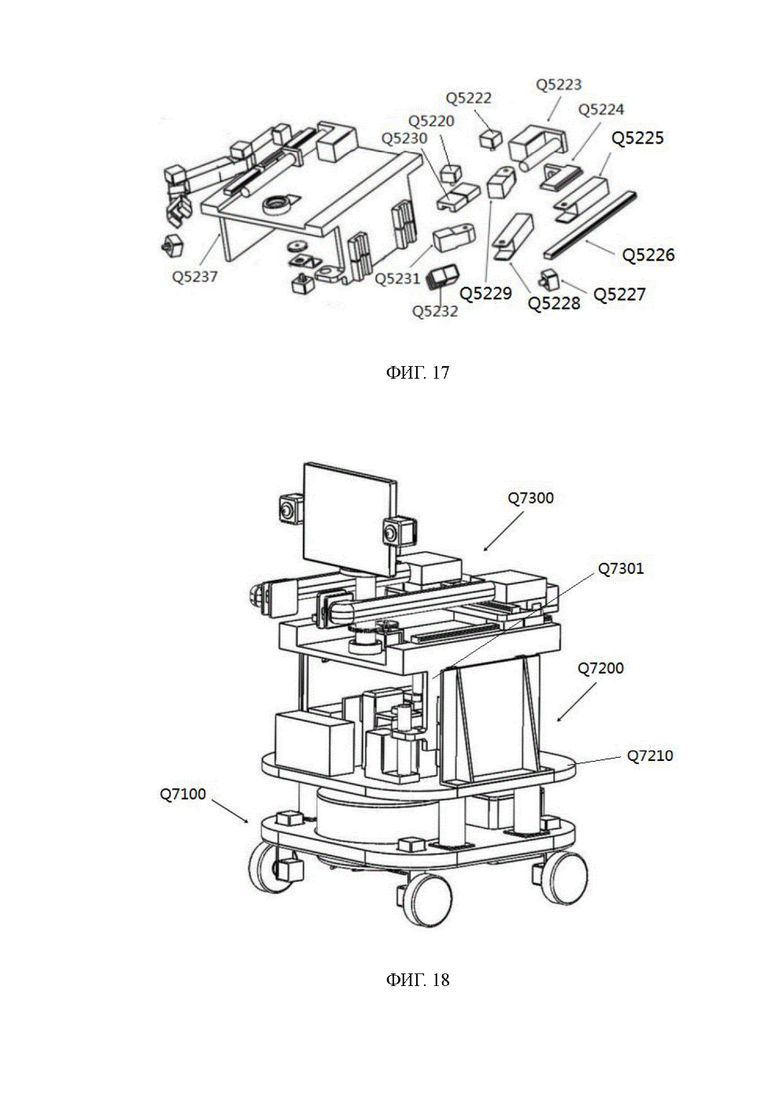
[0038] ФИГ. 18 - схематический вид робота для очистки.
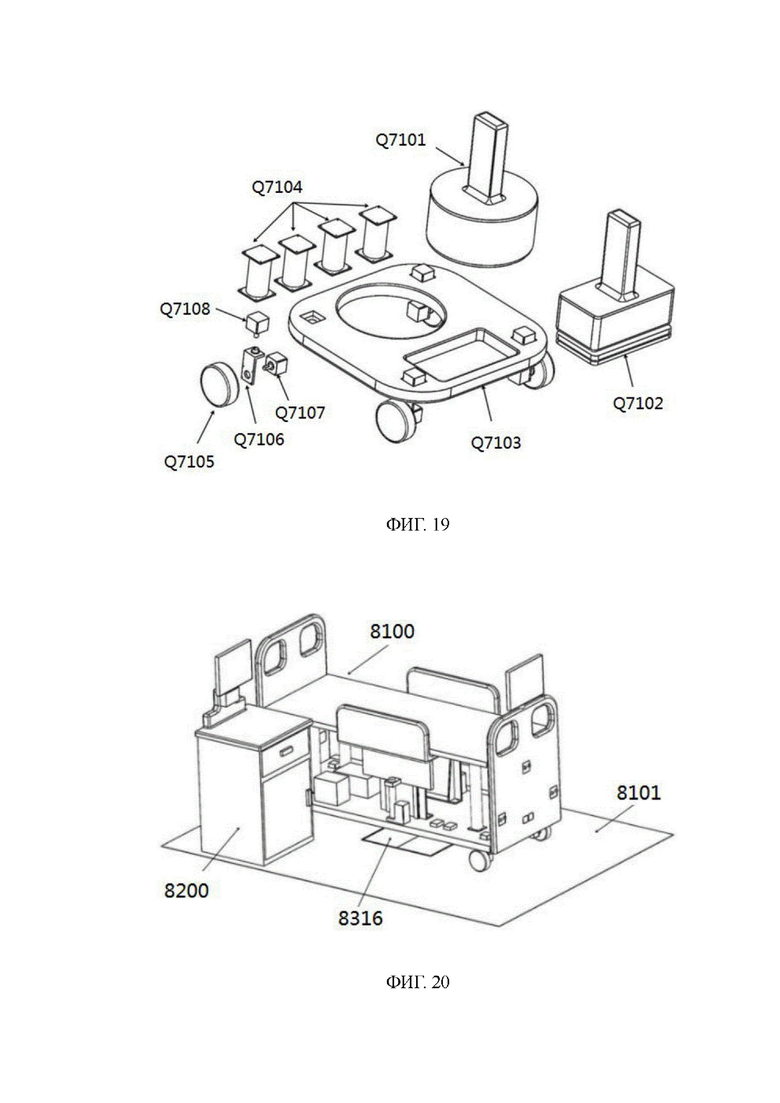
[0039] ФИГ. 19 - принципиальная структурная схема базового устройства робота для очистки.
[0040] ФИГ. 20 - схематический вид, показывающий структуру автоматической тележки для перемещения.
[0041] ФИГ. 21 - схематический вид, показывающий нижнюю часть конструкции автоматического тележки для перемещения.
[0042] ФИГ. 22 - принципиальный структурный вид автоматического зарядного и фиксирующего устройства автоматической тележки для перемещения.
[0043] ФИГ. 23 представляет собой схематический вид устройства управления.
[0044] Основные ссылочные номера следующие:
[0045] катетерная камера 1, ложе для катетера 101, камера управления 2, смотровое окно 201, устройство DSA 3, устройство введения контрастного вещества 4, устройство мониторинга 5, экран 51, опора экрана 52, контроллер 6, палата 7, автоматическая тележка для перемещения 8, зарядный пост тележки для перемещения 81, зона зарядки 9, робот для интервенционной хирургии Q1, главный управляющий робот Q2, робот для пункции Q3, робот для замены катетера и направляющей проволоки Q4, робот для доставки расходных материалов Q5, робот для быстрой зарядки Q6, робот для очистки Q7.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0046] Для лучшего понимания технических решений раскрытия, раскрытие подробно описано ниже со ссылкой на сопровождающие чертежи и подробное описание. Варианты осуществления раскрытия будут более подробно описаны ниже со ссылкой на чертежи и конкретные варианты осуществления, но раскрытие этим не ограничивается.
[0047] Далее будут подробно рассмотрены варианты осуществления раскрытия, примеры которых показаны на прилагаемых чертежах, где одинаковые или подобные ссылочные номера обозначают одинаковые или подобные элементы, или элементы, имеющие одинаковую или подобную функцию. Варианты осуществления, описанные ниже со ссылкой на чертежи, являются иллюстративными и предназначены для пояснения изобретения и не должны рассматриваться как ограничивающие изобретения.
[0048] В описании раскрытия следует понимать, что термины "верхний", "нижний", "передний", "задний", "левый", "правый", "вертикальный", "горизонтальный", "верхний", "нижний", "внутренний", "внешний" и т.д., указывают положение или позиционные отношения, основанные на тех, которые показаны на чертежах, и предназначены только для удобства описания и простоты описания, но не указывают и не подразумевают, что указанные устройства или элементы должны иметь конкретное положение, быть сконструированы и работать в конкретном положении, и, таким образом, не должны толковаться как ограничивающие раскрытие.
[0049] Кроме того, термины "первый", "второй" и "первый" используются только в целях описания и не должны толковаться как указывающие или подразумевающие относительную важность или косвенно указывающие на количество указанных технических признаков. Таким образом, признак, определенный как "первый" или "второй", может явно или неявно включать один или несколько таких признаков. В описании раскрытия "множество" означает два или более, если специально не определено иное.
[0050] В раскрытии, если иное явно не указано или не ограничено, термины "установленный", "соединенный", "фиксированный" и т.п. следует толковать широко, например, как постоянно соединенный, разъемно соединенный или неотъемлемый; может быть механически или электрически соединен; прямо или косвенно через промежуточные среды, внутри или в любой другой связи. Конкретные значения вышеуказанных терминов в раскрытии могут быть поняты в соответствии с конкретными ситуациями специалистами в данной области техники.
[0051] Многочисленные проблемы для существующей интервенционной операции были указаны в предпосылках раскрытия. В вариантах осуществления изобретения предусмотрена система интервенционной автоматизированной операционной системы, см., например, ФИГ. 1-3. Система включает катетерную камеру 1, камеру управления 2, устройство мониторинга 5 и контроллер 6. Катетерная камера 1 представляет собой зону интервенционной хирургии и внутри снабжена катетерным ложем 101.
[0052] Камера управления 2 расположена рядом с катетерной камерой 1, а между катетерной камерой 1 и камерой управления 2 расположено смотровое окно 201.
[0053] Робот для интервенционной хирургии Q1, главный управляющий робот Q2, робот для пункции Q3 и робот для замены катетера и направляющих проволок Q4, которые согласованы друг с другом, расположены в катетерной камере 1. Устройство DSA 3 и устройство введения контрастного вещества 4 расположены на ложе катетера 101.
[0054] Устройство мониторинга 5 расположено в камере управления 2 и находится в связи с роботом. Устройство DSA 3 и устройство введения контрастного вещества 4 используется для отображения информации каждого устройства и робота, и используется для синхронного обновления и мониторинга в реальном времени врачами.
[0055] Контроллер 6 расположен в камере управления 2 и используется для человеко-машинного взаимодействия между врачом и роботом.
[0056] Изобретение раскрывает интервенционную автоматизированную операционную систему, в которой катетерная камера и камера управления сконструированы таким образом, чтобы примыкать друг к другу, и множество роботов с различными функциями, работающих в согласованном режиме, расположены в катетерной камере, устройство DSA и устройство введения контрастного вещества расположены на ложе катетера, и операция выполняется в согласованном режиме. Операции, по меньшей мере, включают диагностики изображения, пункции, установки направляющей провлоки катетера, замены направляющей проволоки катетера, перемещения направляющей проволоки катетера, ангиографии и тому подобное. Точность операции повышается, устройство мониторинга для отслеживания информации о различных состояниях и контроллер человеко-машинного взаимодействия между врачом и роботами расположены в камере управления, так что ручной мониторинг реализуется, цель автоматизированной интервенционной операции реализуется комбинацией роботов. Решаются проблемы высокого давления и тяжелой работы оператора интервенционной операции. Врачу не нужно надевать свинцовую одежду в камере управления в течение длительного времени, тем самым предотвращается травма, связанная с длительным воздействием DSA -излучения, и уменьшается влияние интервенционной операции на здоровье врача.
[0057] В одном варианте осуществления изобретения рядом с катетерной камерой 2 предусмотрена палата 7 для отдыха пациента. Предпочтительно, палата расположена напротив катетерной камеры.
[0058] В одном варианте осуществления изобретения между палатой 7 и катетерной камерой 1 перемещается автоматическая тележка 8 для автоматического перемещения пациента, что устраняет необходимость значительных затрат рабочей силы на транспортировку пациента.
[0059] Преимуществом является то, что в палате 7 закреплен зарядный пост 81 для зарядки автоматической тележки 8.
[0060] В одном варианте осуществления изобретения робот дополнительно включает робот доставки расходных материалов Q5. Робот доставки расходных материалов Q5 записывает информацию о хирургических расходных материалах для доставки хирургических расходных материалов в камеру катетера 1, которая связывается с устройством мониторинга 5 и контроллером 6.
[0061] В одном варианте осуществления изобретения робот дополнительно включает робота быстрой зарядки Q6. Робот быстрой зарядки Q6 находится в связи с множеством роботов и используется для замены разряженной батарей. Таким образом, решается проблема того, что робот не может своевременно заполнить разражённую батарею.
[0062] Преимущественно, зарядная зона 9 для зарядки разряженной батареи расположена снаружи катетерной камеры 1, а робот быстрой зарядки Q6 расположена в зарядной зоне 9.
[0063] В других вариантах осуществления раскрытия робот для очистки Q7 коммуникативно связан с контроллером 6, и робот для очистки Q7 используется для автоматической очистки внутренней части камеры катетера 1 после завершения операции. Таким образом, катетерная камера не нуждается в частой очистке персоналом, и эффективность очистки повышается.
[0064] Преимущественно, устройство мониторинга 5 включает в себя несколько экранов 51, каждый из которых поддерживается опорой 52.
[0065] В вышеуказанных вариантах осуществления изобретения роботы выполнены с приоритетом полномочий, и главный управляющий робот Q2 имеет наибольшие полномочия, являясь управляющим при выполнении операции, и используется для диагностики изображения и инструктирования других роботов для согласованной работы.
[0066] В одном варианте осуществления раскрытия планировка интервенционной автоматизированной операционной камеры может быть разделена на четыре пространства. В палате установлена электрическая зарядная зона для автоматической тележки для перемещения. В зарядной зоне предусмотрено зарядное устройство. Катетерная камера включает в себя робота для интервенционной хирургии, ложе для катетера, устройство DSA, робота для очистки, главного управляющего робота, робота для пункции, устройство для введения контрастного вещества, робота для замены катетера и направляющей проволоки. Камера управления включает в себя устройство мониторинга и контроллер. Несколько роботов функционируют в разных зонах. Каждый из них представляет собой автоматическую тележку, которая перемещается между палатами и катетерными камерами. Робот быстрой зарядки перемещается между зоной зарядки и катетерной камерой. Робот для доставки расходных материалов перемещается между катетерной камерой и камерой управления.
[0067] Со ссылкой на ФИГ. 2, в катетерной камере 1 смотровое окно 201 выполнено из свинцового стекла, что облегчает камере управления просмотр катетерной камеры. Устройство направляющей проволоки 101 установлено в центре катетерной камеры 1. Устройство DSA 3 установлено в головной части направляющей проволоки 101, а главный управляющий робот Q2 перемещается с левой стороны направляющей проволоки 101. После въезда автоматической тележки 8 в катетерную камеру правая сторона катетерного ложа 101 останавливается, и после того, как пациент садится на катетерное ложе 101, автоматическая тележка 8 выходит из катетерной камеры и ожидает у дверного проема. Робот интервенционной хирургии Q1 устанавливается на рельс сбоку от катетерного ложа 101. Устройство для введения контрастного вещества 4 размещается на катетерном ложе 101. Робот для очистки Q7, робот для замены катетера и направляющей проволоки Q4 и робот для пункции Q3 соответственно находятся в углах катетерной камеры. При необходимости они могут быть выдвинуты для работы. Робот доставки расходных материалов Q5, после извлечения расходных материалов, размещается на катетерном ложе 101, а затем выходит за пределы катетерной камеры в резервный режим.
[0068] Полная процедура всей интервенционной операции выглядит примерно следующим образом: сначала пациент ожидает в палате, а после получения сообщения о том, что операция может быть проведена, автоматическая тележка для перемещения свободно перемещается. Пациент ложится на автоматическую тележку для перемещения, и автоматическая тележка для перемещения автоматически доставляет пациента в катетерную камеру по заданному маршруту в соответствии с GPS-навигацией и останавливается у катетерного ложа. Затем, после того как пациент переместится с тележки для перемещения на катетерное ложе, тележка для перемещения автоматически выходит из катетерной камеры, остается снаружи катетерной камеры в режиме ожидания окончания операции. После того как пациент ложится, главный управляющий робот дает команду роботу для пункций начать действия, робот для пункций может переместиться к боковой поверхности катетерного ложа, и начинаются действия по дезинфекции, местной анестезии, пункции, имплантации внешней оболочки и т.п. пациенту шаг за шагом. После завершения каждого действия сообщение передается главному управляющему роботу. Главный управляющий робот начинает инструктировать устройство DSA и робота интервенционной хирургии о начале операции. Под руководством главного управляющего робота интервенционный робот сопоставляется с изображением устройства DSA для последовательного завершения размещения контрастной направляющей проволоки и контрастного катетера в правильном положении кровеносного сосуда пациента, главный управляющий робот указывает устройству введения контрастного вещества для введения контрастного вещества, и изображение кровеносного сосуда может быть отображено на устройстве DSA. Угол DSA регулируется, и выполняется визуализация различных положений, чтобы можно было наблюдать более полную морфологию кровеносного сосуда. После получения различных изображений кровеносных сосудов главный управляющий робот может проводить анализ состояния заболевания в соответствии с изображениями кровеносных сосудов, и результат диагностики получается после того, как главный управляющий робот сравнивает и анализирует изображения кровеносных сосудов с большими данными. Если операцию необходимо продолжить, устройство DSA и интервенционный робот совместно выполняют установку направляющего катетера. В это время главный управляющий робот дает команду роботу для замены катетера и направляющей проволоки помочь завершить замену направляющей проволоки и катетера. Одновременно главный управляющий робот может выбрать необходимый расходный материал операции, послать расходный материал и доставить роботу, или отправить инструкцию через контроллер, и расходный материал для доставки роботу будет отыскиваться, и после нахождения целевого расходного материала, расходный материал будет доставлен роботу и может быть размещен на ложе катетера, и главный управляющий робот может помочь завершить и установить расходный материал при вмешательстве робота в операцию. Проталкивание хирургических расходных материалов (например, стента) затем осуществляется поэтапно, на основе изображений DSA, во время которого требуется многократное использование устройства для введения контраста. Главный управляющий робот может завершить управление рычагом DSA во время операции, и после одношаговой операции оперативное лечение завершается гладко.
[0069] Затем с помощью главного управляющего робота все катетеры с направляющей проволокой извлекаются из тела. Главный управляющий робот помогает пациенту завершить перевязку. Посылается сообщение автоматической тележке для перемещения пациента, чтобы войти в катетерную камеру и остановиться у катетерного ложа, пациент возвращается от катетерного ложа к тележке, и тележка возвращается в палату с пациентом и останавливается на месте.
[0070] Во время операции состояния и данные всех устройств находятся на устройстве мониторинга в камере управления, так что врач может контролировать ход операции на всем ее протяжении. При обнаружении каких-либо отклонений операция может быть приостановлена и скорректирована в любое время через контроллер. После устранения отклонений операция может быть продолжена. Врач также может использовать контроллер для управления роботом. После завершения одной операции главный управляющий робот дает команду роботу для очистки очистить камеру катетера, или контроллер посылает команду роботу для очистки подготовиться к следующей операции.
[0071] Каждый робот имеет все принятые литиевые батареи с питанием, если обнаружено, что определенный робот имеет низкий заряд, робот быстрой зарядки получает сигнал, чтобы принести заряженную литиевую батарею и удалить и заменить у робота рядом с роботом, чтобы забрать батарею с низким зарядом обратно и зарядить на электрической свае.
[0072] Робот и устройство, применяемые в вышеуказанном потоке операций, могут быть роботом, способным реализовать соответствующие функции, и следующий робот может быть принят в качестве индивидуального робота, а функции робота описаны только на индивидуальном примере.
[0073] Интервенционный хирургический робот Q1 может быть общим интервенционным радиографическим и терапевтическим операционным роботом, раскрытым в патенте CN112353491A, и соединенным с катетерной камерой. Главный управляющий робот Q2 может перемещаться в катетерной камере, принимая структуру кузова транспортного средства. Робот контролирует все части, включая DSA, ложе катетера, других роботов и т.п. во время операции, может управлять потоком операций посредством машинного обучения, посылает инструкции, чтобы направить все оборудование для выполнения соответствующих действий, и отправляет различные данные в систему мониторинга в режиме реального времени. После завершения операции робот может самостоятельно переместиться в угол, и другие операции не подвергаются влиянию.
[0074] Со ссылкой на ФИГ. 4-6, главный управляющий робот Q2 включает базовое устройство Q2100, компонент головы и руки Q2200 и пальцевое устройство Q2300. Базовое устройство Q2100 имеет шагающее устройство в нижней части для перемещения к целевой области, а педальное устройство для имитации стопы врача для управления перспективой и воздействием DSA расположено на шагающем устройстве. Компонент головы и руки Q2200 поддерживается на верхней части базового устройства Q2100 и используется для заполнения идентификационной информацией и позиционирования пальцев. Пальцевое устройство Q2300 соединено с концом руки компонента головы и руки Q2200 и используется для зажима, замены и установки хирургического оборудования.
[0075] Пальцевое устройство Q2300 включает соединительную пластину Q2301, направляющую пальца Q2303, двигатель ведущего винта пальца Q2311, соединительный элемент Q2304, Q2309 и два пальца (Q2307 и Q2306), выполняющие относительное движение или противоположное движение. Соединительная пластина пальца Q2301 соединена с концевой частью рычага. Нижняя часть соединительной пластины Q2301 соединена с направляющей для пальцев Q2303, и два блока скольжения пальцев скользят по направляющей для пальцев Q2303. Под соединительной пластиной Q2301 через кронштейн Q2310 закреплен двигатель Q2311. Каждый блок скольжения пальцев соответственно соединен с одним соединительным элементом Q2304, Q2309, а два соединительных элемента Q2304, Q2309 соответственно имеют резьбу по часовой стрелке и против часовой стрелки, которые находятся в резьбовом соединении с двигателем ведущего винта пальцев Q2311. Когда двигатель Q2311 вращается. Каждый соединительный элемент Q2304 и Q2309 соответственно соединен с одним из трехмерных датчиков давления Q2305 и Q2308. Пальцы Q2306 и Q2307 соединены с нижней частью каждого трехмерного датчика давления Q2305 и Q2308, внутренние поверхности пальцев Q2306 и Q2307 выполнены из мягкого медицинского силикагеля, и можно предотвратить повреждение хирургического оборудования.
[0076] Трехмерный датчик давления, расположенный в пальцевом устройстве, может определять силу зажима и гарантировать точность зажима.
[0077] Преимущественно, соединительная пластина Q2301 для пальцев простирается наклонно наружу, образуя держатель камеры для пальцев, и по меньшей мере одна камера для пальцев Q2302 соединена с держателем камеры для пальцев, и камера для пальцев 302 расположена в направлении пальцев Q2306 и Q2307.
[0078] После зажатия объекта датчики трехмерного давления Q2305 и Q2308 могут воспринимать значения давления, и при достижении определенного значения двигатель Q2311 приводного винта пальца прекращает движение. В процессе зажима пальцевая камера Q2302 в любой момент обращает внимание на форму объекта, чтобы исключить ситуацию зажима поврежденного оборудования. Пальцевая камера Q2302 используется для наблюдения за средой кончика пальца, может сделать вещи удобными для распределения и точного положения лучшего объекта наблюдения робота и врача.
[0079] Следует отметить, что перед началом операции главный управляющий робот Q2 автоматически перемещается в сторону ложа катетера, чтобы контролировать и направлять работу каждого устройства, и отвечает за действия по зажиму и замене операционного оборудования в ходе операции. После завершения операции робот может автоматически переместиться в угол, при этом на использование и очистку другого оборудования он не влияет. Перед первым использованием робота необходимо обучение и тренировка, целью которых является адаптация робота к среде катетерной камеры и знакомство с оборудованием, таким как DSA, катетерное ложе и другие роботы, используемые в текущем медицинском применении, а также обучение и другого оборудования, которое может быть хорошо согласовано для работы. После длительного обучения робот может постепенно осваивать и запоминать полученные знания, а после полного обучения робот может нормально использоваться для автоматизированной хирургии или вспомогательной хирургии. Роботизированная система хранит большое количество изображений операций и стандартных потоков операций, а также множество мер по обработке отклонений, и может быть использована в реальной клинике. Робот имеет функцию автономного обучения и может записывать, и анализировать ситуацию каждой последующей операции, чтобы выбрать оптимальное решение в последующей операции.
[0080] Робот для пункций Q3, со ссылкой на ФИГ. 7, включает базовое устройство, компоненты головы и руки, а также устройства пальцев для пункции, которые соответственно соединены с первым пальцевым устройством Q3300 и вторым пальцевым устройством Q3400 посредством двух механических рук. В базовом устройстве информация принимается, хранится, информация обрабатывается и отправляется через главный компьютер робота для пункций. Первое пальцевое устройство используется для позиционирования точки пункции при операции, а второе пальцевое устройство используется для пункции. Во время работы эти два устройства взаимодействуют друг с другом для захвата, замены и установки хирургического оборудования, что реализует роботизированную операцию по пункции, повышает точность пункции и еще больше снижает повторную операцию из-за неточного положения точки пункции. Это позволяет устранить состояние вазоспазма и повысить безопасность пункционной операции.
[0081] В частности, со ссылкой на ФИГ. 8, первое пальцевое устройство Q3300 включает в себя соединительную пластину первого пальца Q3302, направляющую первого пальца Q3303, винтовой двигатель первого пальца Q3305, первую соединительную пластину Q3306, Q3312, первый датчик трехмерного давления Q3307, Q3311 и расходный материал первого пальца Q3309. Первая соединительная пластина для пальцев Q3302 соединена с концевой частью механического рычага. Нижняя часть соединительной пластины первого пальца Q3302 соединена с направляющей первого пальца Q3303, и два блока скольжения первого пальца скользят по направляющей первого пальца Q3303. Винтовой двигатель первого пальца Q3305 закреплен под соединительной пластиной первого пальца Q3302 через кронштейн двигателя первого пальца Q3304. Каждый из первых блоков скольжения пальцев соответственно соединен с одной первой соединительной пластиной Q3306, Q3312, а две первые соединительные пластины Q3306, Q3312 соответственно имеют резьбу по часовой стрелке и резьбу против часовой стрелки, которые сопряжены с двигателем первого пальца Q3305 резьбовым способом. Один из первых трехмерных датчиков давления Q3307, Q3311 соединен с нижней частью каждого из первых соединительных элементов Q3306, Q3312. Каждый первый трехмерный датчик давления Q3307, Q3311 внизу соединен с первым расходным материалом для пальцев Q3309. Внутренняя поверхность первого пальцевого расходного материала Q3309 выполнена из мягкого медицинского силикагеля.
[0082] Преимущественно, первый электромагнит Q3308, Q3310 закреплен между первым датчиком трехмерного давления Q3307, Q3311 и первым пальцевым расходным материалом Q3309, и первый пальцевый расходный материал Q3309 имеет внутри первый железный лист, магнитно соединенный с первым электромагнитом Q3308, Q3310.
[0083] Внутри расходного материала первого пальца Q3309 формируется углубление, и первый железный лист помещается в углубление и соединяется с электромагнитом магнетизма, и удобство заключается в смене расходного материала. Расходный материал первого пальца Q3309 является одноразовым расходным материалом, стерилизуемым этиленоксидом, и для каждой операции используется новый комплект. Внутренняя поверхность расходного материала для первого пальца Q3309 изготовлена из мягкого медицинского силикагеля, что позволяет предотвратить скольжение и повреждение хирургического оборудования.
[0084] Более предпочтительно, сторона соединительной пластины Q3302 первого пальца выступает наклонно наружу, образуя опору камеры первого пальца. По меньшей мере одна первая пальцевая камера Q3301 соединена с опорой пальцевой камеры, и первая пальцевая камера Q3301 расположена в направлении первого расходного материала Q3309. Первая пальцевая камера Q3301 используется для наблюдения за обстановкой вокруг кончика пальца.
[0085] Один из первых соединительных элементов Q3306, Q3312 имеет резьбу по часовой стрелке, а другой из первых соединительных элементов Q3306, Q3312 имеет резьбу против часовой стрелки, так что при вращении двигателя два первых пальцевых расходных элемента Q3309 перемещаются относительно или противоположно для зажима или извлечения объекта. После зажатия объекта первые трехмерные датчики давления Q3307, Q3311 определяют величину давления, и после достижения определенного значения двигатель прекращает движение. В процессе зажима первая пальцевая камера Q3301 в любой момент обращает внимание на форму объекта, чтобы убедиться в отсутствии поломки оборудования.
[0086] Со ссылкой на ФИГ. 9, второе пальцевое устройство Q3400 включает соединительную пластину второго пальца Q3402, две направляющие второго пальца Q3415, винтовой двигатель второго пальца Q3404, две направляющие третьего пальца Q3405 и переходную пластину Q3406. Верхняя часть соединительной пластины второго пальца Q3402 соединена с концевой частью другого механического рычага, а нижняя часть соединительной пластины второго пальца Q3402 образована двумя монтажными планками, которые расположены параллельно и выступают вниз. Направляющие для второго пальца Q3415 соответственно установлены под монтажными планками. На каждой направляющей второго пальца Q3415 установлены по меньшей мере два блока скольжения второго пальца. Винтовой двигатель второго пальца Q3404 закреплен под соединительной пластиной второго пальца Q3402 через кронштейн двигателя второго пальца и расположен между двумя монтажными планками. Верхняя часть переходной пластины Q3406 снабжена соединительным блоком в резьбовом соединении с ведущим винтом двигателя винта второго пальца Q3404, а переходная пластина Q3406 закреплена на нижней поверхности блока скольжения второго пальца. Две направляющие для третьего пальца Q3405 расположены в нижней части переходной пластины Q3406 параллельно, и расположены перпендикулярно направляющим для второго пальца Q3415, и по меньшей мере два блока скольжения третьего пальца скользят по нижней части каждой направляющей для третьего пальца Q3405. Двигатель Q3407 для привода третьего пальца закреплен между двумя вторыми направляющими для пальцев Q3415 через кронштейн двигателя. Каждый скользящий блок третьего пальца соответственно соединен с одним вторым соединительным элементом Q3408, Q3414, и два вторых соединительных элемента Q3408, Q3414 соответственно имеют резьбу по часовой стрелке и против часовой стрелки, совпадающую с резьбой винтового двигателя третьего пальца Q3407. Один второй датчик трехмерного давления Q3409, Q3412 соответственно соединен под каждым вторым соединительным элементом Q3408, Q3414. Один второй пальцевый расходный материал Q3411 соединен с нижней частью каждого второго трехмерного датчика давления Q3409, Q3412, а внутренняя поверхность второго пальцевого расходного материала Q3411 выполнена из мягкого медицинского силикагеля.
[0087] Внутри расходного материала второго пальца Q3411 формируется углубление. Второй железный лист помещается в углубление и соединяется с электромагнитом, что удобно для смены расходного материала. Расходный материал второго пальца Q3411 является одноразовым расходным материалом, стерилизуемым этиленоксидом, и для каждой операции используется новый комплект. Внутренняя поверхность расходного материала второго пальца Q3411 изготовлена из мягкого медицинского силикагеля, что позволяет предотвратить скольжение и повреждение хирургического оборудования.
[0088] Преимущественно, второй электромагнит Q3410, Q3413 закреплен между вторым датчиком трехмерного давления Q3409, Q3412 и вторым пальцевым расходным материалом Q3411, а вторая железная деталь, магнитно связанная со вторым электромагнитом Q3410, Q3413, расположена во втором пальцевом расходном материале Q3411.
[0089] Более предпочтительно, соединительные пластины второго пальца Q3402 простираются наклонно в направлении двух сторон, образуя опоры камеры второго пальца, каждая опора камеры второго пальца соединена по меньшей мере с одной камерой второго пальца Q3401, Q3403, и камеры второго пальца Q3401, Q3403 расположены в направлении расходного материала второго пальца Q3411.
[0090] Один второй соединительный элемент Q3408, Q3414 имеет резьбу по часовой стрелке, а другой второй соединительный элемент Q3408, Q3414 имеет резьбу против часовой стрелки, так что когда винтовой двигатель третьего пальца Q3407 (третий здесь означает последовательность винтовых двигателей, а не третий палец) вращается, два расходных элемента второго пальца Q3411 осуществляют относительное движение или противоположное движение, и объект зажимается и извлекается. После зажатия объекта вторые трехмерные датчики давления Q3409 и Q3412 определяют величину давления, и при достижении определенного значения двигатель прекращает движение. Во время зажима камеры второго пальца Q3401 и Q3403 обращают внимание на форму объекта в любое время, чтобы не допустить условия зажима поврежденного оборудования. Все пальцевое устройство внизу приводится в движение влево и вправо под действием привода второго пальцевого винтового двигателя Q3404, и возвратно-поступательное движение направляющей проволоки, внешней оболочки и тому подобного может быть реализовано путем согласования с зажимным действием третьего пальцевого винтового двигателя Q3407. В частности, двигатель второго пальцевого винта Q3404 вращается, чтобы позволить второму пальцевому расходному материалу Q3411 переместиться к самому правому концу, двигатель третьего пальцевого винта Q3407 вращается, чтобы позволить второму пальцевому расходному материалу Q3411 зажать направляющую проволоку или оболочку, вторые трехмерные датчики давления Q3409 и Q3412 используются для определения силы зажима. После зажима второй пальцевой винтовой двигатель Q3404 поворачивается, чтобы палец мог переместиться к крайнему левому концу, третий пальцевой винтовой двигатель Q3407 разжимает направляющую проволоку или оболочку, второй пальцевой винтовой двигатель Q3404 поворачивается, чтобы вернуться в исходное положение, и операция повторяется до достижения требуемого положения.
[0091] Во время проведения пункции хирургическим роботом для пункции в качестве примера для пояснения взята пункция лучевой артерии запястья. После начала операции необходимые расходные материалы для пункционной операции размещаются на ложе катетера, и робот перемещается в сторону ложа катетера. Первое пальцевое устройство робота используется для поиска запястья пациента, и после позиционирования в положение лучевой артерии, палец может быть использован для прощупывания пульса лучевой артерии. Один палец может использоваться для прощупывания пульса, в то время как другой палец находится в подвешенном состоянии. Трехмерный датчик давления на ощупываемом пальце ищет пульс, если во время поиска положение не подходит, положение меняется и поиск продолжается. Если пульс ощущается, камера пальца определяет положение, и это положение функционирует как точка пункции. Во время обнаружения импульса, если значение давления представляет собой регулярно меняющееся числовое значение, оно обозначается как импульс; если значение давления не меняется, оно не обозначается как импульс, а трехмерный датчик давления может быть FA702-D или кремниевый пьезорезистивный тип. Объем датчика давления может быть выбран в зависимости от использования. Первое пальцевое устройство робота захватывает ватный шарик, смоченный в спирте, и протирает кожу придатка лучевой артерии. Первое пальцевое устройство робота захватывает шприц с анестезирующим веществом, перемещается к придатку лучевой артерии и осторожно проникает в кожу. Второе пальцевое устройство робота проталкивает дозу в шприц и останавливает его. Первое пальцевое устройство удерживает шприц. Подождав некоторое время, первое пальцевое устройство робота используется для осторожного захвата руки пациента, второе пальцевое устройство робота используется для захвата пункционной иглы, а камера второго пальца используется для поиска точки пункции. Приводимая в движение винтовым двигателем второго пальца, игла для пункции медленно вводится в кожу, и в то же время две камеры устройства второго пальца наблюдают за тем, возвращается ли кровь, и прекращают движение двигателя, если кровь возвращается. Первое пальцевое устройство робота медленно перемещается, чтобы захватить иглу для пункции, а второе пальцевое устройство робота вытаскивает стержень иглы. Первое пальцевое устройство медленно опускается, а затем второе пальцевое устройство захватывает направляющую проволоку для пункции и вводит ее в иглу для пункции. Направляющая проволока медленно продвигается вперед и назад на определенное расстояние. Первое пальцевое устройство удерживается на месте пункционного отверстия, а второе пальцевое устройство извлекается из трубки пункционной иглы. Второе пальцевое устройство захватывает внешнюю оболочку, а первое пальцевое устройство захватывает конец направляющей проволоки для пункции. Второе пальцевое устройство вдевает наружную оболочку в направляющую проволоку, затем первое пальцевое устройство удерживает место прокола, а второе пальцевое устройство вдевает наружную оболочку в сосуд вдоль направляющей проволоки, продвигает наружную оболочку вперед, пока наружная оболочка не достигнет места прокола, пока весь процесс пункции не будет завершен. После завершения пункции робот возвращается в угол, не влияя на последующий ход операции.
[0092] Робот Q4 для замены катетера и направляющей проволоки используется в интервенционных операциях, и операция замены выполняется для расходных материалов интервенционных операций, таких как направляющие проволки, баллоны или стент-катетеры и тому подобное, со ссылкой на прилагаемые ФИГ. 10-13. Катетер направляющей проволоки может быть заменен путем совмещения с роботом интервенционной хирургии, а также может быть заменен путем совмещения с помощью врачей. Изобретение используется для выполнения операций по накручиванию и извлечению направляющей проволоки, накручиванию катетера на направляющую проволоку и проталкиванию катетера в Y-образный клапан, извлечению катетера из направляющей проволоки и т.п., что обеспечивает отсутствие смещения катетера и направляющей проволоки в процессе замены направляющей проволоки катетера, обеспечивая тем самым безопасность операции.
[0093] Робот Q4 для замены катетера и направляющей проволоки включает в себя базовое устройство, головку и компонент движущей руки Q4400. Компонент движущей руки Q4400 используется для завершения действия по замене катетера с направляющей проволокой. Расположены три группы рычагов, и каждый из них функционирует независимо. Три группы рычагов расположены на соединительной пластине, и соединительная пластина может двигаться вперед и назад через две группы двигателей с винтовыми штоками и две группы линейных направляющих и используется для выдвижения и втягивания рычагов рукоятки. Три группы рычагов имеют практически одинаковую структуру и могут двигаться влево и вправо. Каждая группа рычагов имеет зажимной механизм для зажима и извлечения направляющей проволоки или катетера. Датчик давления расположен в зажимном устройстве и используется для определения силы зажима. Три рычага взаимно согласованы между собой, чтобы действовать в рабочем режиме.
[0094] Компонент приводного рычага Q4400 включает опору рычага Q4312, и опора рычага Q4312 представляет собой гантри раму. Нижняя часть опоры рычага Q4312 соединена с базовым устройством. Две группы линейных направляющих Q4308 по оси Y закреплены на верхней плоскости опоры рычага Q4312 параллельно. Первый скользящий блок скользит по каждой линейной направляющей оси Y Q4308. На верхней поверхности первого скользящего блока закреплена рабочая пластина Q4306. Верхняя плоскость опоры рычага Q4312 расположена между двумя линейными направляющими оси Y Q4308. Две группы двигателей винтовых штанг оси Y Q4309 расположены параллельно, и винтовая штанга каждой группы двигателей винтовых штанг оси Y Q4309 входит в зацепление с первым резьбовым отверстием, соответствующим образом, расположенным на рабочей пластине Q4306. Первый рычажный механизм, второй рычажный механизм и третий рычажный механизм последовательно расположены на верхней поверхности рабочей плиты Q4306 параллельно в направлении, близком к дну направляющей трубы. Двигатель ведущего винта оси Y Q4309 соединен с приводным устройством на основании. Под действием двигателя Q4309 с ведущим винтом по оси Y рабочая пластина Q4306 может перемещаться влево и вправо для выполнения действий по выдвижению и втягиванию всего рычага.
[0095] Со ссылкой на ФИГ. 11 и 12, первый рычажный механизм, второй рычажный механизм и третий рычажный механизм имеют одинаковую структуру, и каждый из первого рычажного механизма, второго рычажного механизма и третьего рычажного механизма включает в себя прямоугольную раму Q4423. Прямоугольная рама Q4423 включает соединительную секцию и зажимную секцию, которые образуют L-образную форму. Соединительная секция скользит по линейной направляющей Q4419, закрепленной на опоре рычага Q4312. В верхней части соединительной секции установлена направляющая Y-направления. Третий блок скольжения скользит по направляющей Y-направления, прямоугольный соединительный элемент Q4422 с третьим резьбовым отверстием неподвижно соединен с верхней частью третьего блока скольжения. Соединительный участок расположен в задней части направляющей Y-направления. Двигатель Q4402 ведущего винта Y-направления закреплен через опору Q4401 двигателя Y-направления, ведущий винт двигателя Q4402 ведущего винта Y-направления входит в зацепление с третьим резьбовым отверстием, и двигатель Q4402 ведущего винта Y-направления соединен с приводным устройством. Передняя часть прямоугольного соединительного элемента Q4422 соединена с зажимным элементом Q4420, и зажимной элемент Q4420 совмещен с зажимной частью, образуя зажимной механизм. Винтовой двигатель Q4402, направленный по оси Y, приводит в движение третий скользящий блок, так что осуществляется зажим зажимной секции и зажимной части Q4420.
[0096] Преимущественно, со ссылкой на ФИГ. 11, передний конец прямоугольного соединительного элемента Q4422 снабжен первой соединительной выемкой. Зажимная деталь Q4420 представляет собой прямоугольную деталь. Верхняя часть прямоугольной детали Q4422 имеет вторую соединительную выемку, совмещенную с первой соединительной выемкой. Первая соединительная выемка и вторая соединительная выемка соединены. Зажимная часть расположена вертикально по отношению к соединительной части и обращена вниз, и расположена на передней части рабочей пластины и опоры рычага и рядом с боковой частью катетерного ложа. Форма нижней части зажимного элемента Q4420 такая же, как у зажимного участка. Между зажимной частью Q4420 и зажимной секцией образуется область зажима, а на внутренних стенках двух сторон области зажима закреплены кусочки медицинского силикагеля Q4418 для предотвращения скольжения. Первая соединительная выемка и вторая соединительная выемка расположены в шахматном порядке и используются для соединения с двумя концами датчика давления Q4421. Датчик давления Q4421 соединен с носителем базового устройства и используется для определения усилия зажима. Таким образом, усилие зажима передается обратно на главный компьютер через датчик давления Q4421, который посылает команды на управляющее устройство для приведения в действие соответствующего двигателя. Обеспечивается управляемость усилия зажима.
[0097] Приводные пластины Q44231, направленные по оси X, соединены с боковыми сторонами, удаленными от зажимного участка, соответствующих прямоугольных рам Q4423 в первом рычажном механизме, втором рычажном механизме и третьем рычажном механизме. Каждая приводная пластина Q44231 соответствует одной группе приводных механизмов Q44232. Механизмы Q44232 привода Х-направления соединены с приводным устройством. Приводной механизм X-направления Q44232 удобен в управлении, три приводные пластины X-направления Q44231 имеют разную длину в соответствии с расположением, и три группы приводных винтовых двигателей (Q4404, Q4403 и Q4407) и три группы опор приводных двигателей (Q4405, Q4406 и Q4408) расположены соответствующим образом.
[0098] На ФИГ. 12 и 13, первый рычажный механизм, второй рычажный механизм и третий рычажный механизм расположены в таком порядке слева направо. Компонент руки обращен в сторону направляющей трубки, и необходимо управлять первым механизмом руки роботом для захвата направляющей проволоки на наконечнике Q4105, а затем зафиксировать первый механизм руки в неподвижном состоянии. Третий рычажный механизм захватывает кончик катетера Q4103, второй рычажный механизм захватывает хвостовой конец направляющей проволоки Q4102, регулирует положение, чтобы вставить катетер Q4103 в направляющую проволоку Q4102, затем третий рычажный механизм толкает катетер Q4103 вперед, при приближении ко второму рычажному механизму второй рычажный механизм освобождается. Затем второй рычажный механизм управляется для перемещения примерно на 2 см в направлении клапана Y. Второй рычажный механизм управляется для зажима направляющей проволоки. Третий рычажный механизм управляется, чтобы продолжать продвигать катетер Q4103 вперед, и процесс последовательно повторяется до тех пор, пока хвостовой конец направляющей проволоки Q4102 не пройдет через направляющую проволоку Q4103 примерно на 3 см. Третий рычажный механизм приводится в действие для отступления и перемещается к заднему концу Q4101, и направляющая проволока Q4102, выведенная из среднего конца катетера Q4103, зажимается. Затем второй рычажный механизм управляется, чтобы толкать направляющую проволоку Q4103 в направлении клапана Y, удерживая направляющую проволоку Q4103 на среднем конце Q4104. Второй рычажный механизм толкает направляющую проволоку Q4103 вперед. Третий рычажный механизм перемещается назад, пока направляющая проволока Q4102 не будет вытянута в линию. Когда второй рычажный механизм перемещается к первому рычажному механизму, движение второго рычажного механизма останавливается, и первый рычажный механизм управляется для удержания Y-клапана Q4106. Второй рычажный механизм, толкающий направляющую проволоку Q4103, управляется, чтобы войти в Y-образный клапан Q4106. После достижения Y-образного клапана второй рычажный механизм отпускается и отходит примерно на 2 см. Прижимная направляющая проволока снова перемещается вперед, и процесс повторяется до тех пор, пока головная часть направляющей проволоки Q4103 полностью не войдет в Y-образный клапан Q4106.
[0099] Когда катетер Q4103 необходимо извлечь из направляющей проволоки Q4102, и катетер, и направляющая проволока находятся в кровеносном сосуде человека. Во время извлечения катетера необходимо обеспечить, чтобы смещение направляющей проволоки не изменилось. Третий рычажный механизм управляется для зажима направляющей проволоки Q4102, которая находится на расстоянии 2-3 см от выхода Y-клапана Q4106. Первый рычажный механизм управляется для зажима Y-клапана Q4106, а второй рычажный механизм управляется для зажима направляющей трубы Q4103 на выходе Y-клапана Q4106, обеспечивая фиксированное положение третьего рычажного механизма. Второй рычажный механизм перемещается назад, пока второй рычажный механизм не приблизится к третьему рычажному механизму, затем останавливается, и затем третий рычажный механизм освобождается для перемещения назад на 2 см, чтобы зажать направляющую проволоку. Второй рычажный механизм непрерывно перемещается назад, пока второй рычажный механизм не приблизится к третьему рычажному механизму, а затем останавливается. Эти действия последовательно повторяются до тех пор, пока головной конец катетера не окажется на расстоянии 2-3 см от хвостовой части Y-клапана Q4106, после чего первый рычажный механизм перемещается в положение выхода Y-клапана Q4106. Направляющая проволока зажимается, и она остается неподвижной. Затем второй рычажный механизм и третий рычажный механизм управляются, чтобы двигаться назад вместе, пока катетер не выйдет из направляющей проволоки. При замене направляющей проволоки направляющая проволока сначала вставляется в Y-образный клапан Q4106, а третий рычажный механизм и второй рычажный механизм управляются, чтобы зажать положение направляющей проволоки вблизи головного конца. Первый рычажный механизм зажимает Y-клапан Q4106 и сохраняет положение Y-клапана Q4106 неподвижным. Третий рычажный механизм и второй рычажный механизм управляются, чтобы продвинуть направляющую проволоку вперед для входа в Y-образный клапан Q4106. Второй рычажный механизм перемещается к выходу Y-образного клапана и останавливается, затем третий рычажный механизм освобождается и перемещается назад на 2 см. Затем направляющая проволока зажимается, второй рычажный механизм освобождается, и направляющая проволока зажимается после перемещения назад на 2 см. Механизм третьей руки и механизм второй руки двигаются вперед вместе, пока механизм второй руки не остановится после перемещения к выходу Y-клапана, и цикл останавливается до завершения 10-12 групп действий. Когда направляющая проволока Q4102 должна быть удалена, механизм первой руки управляется, чтобы зажать Y-клапан Q4106 и сохранить его фиксированное положение. Третий рычажный механизм управляется для перемещения к выходу Y-клапана Q4106, захвата направляющей проволоки Q4102 и последующего перемещения назад, пока головной конец направляющей проволоки Q4102 не будет полностью освобожден от хвостовой части Y-клапана Q4106, в это время проверяется, что направляющая проволока была полностью удалена.
[00100] Робот доставки расходных материалов Q5, см. ФИГ.16, используется для автоматического управления и операции доставки расходных материалов. Весь процесс автоматизирован, трудовые ресурсы сэкономлены. Устройство в целом имеет компактную структуру, небольшие размеры и особенно приспособлено к среде катетерной камеры. Робот для доставки расходных материалов включает в себя базовое устройство, головку и исполнительное устройство.
[00101] Со ссылкой на ФИГ.17, привод включает два узла рычага, симметрично расположенных по обе стороны головки. Узел рычага включает линейную направляющую Q5226, закрепленную на верхней поверхности U-образной подъемной рамы Q5237. Скользящий блок Q5230 рычага соединен с линейной направляющей рычага Q5226 скользящим образом. Соединительный элемент Q5224 закреплен на скользящем блоке Q5230, а задний рычаг Q5225 закреплен на соединительном элементе Q5224. Передний конец заднего рычага Q5225 вращательно соединен с соединительным элементом среднего рычага Q5229. Пятый серводвигатель Q5222 расположен на заднем рычаге Q5225, а силовой вал пятого серводвигателя Q5222 закреплен на соединительном элементе среднего рычага Q5229. Соединительный элемент среднего рычага Q5229 и средний рычаг Q5228 закреплены. Передний конец среднего рычага Q5228 вращательно соединен с передним рычагом Q5231. Шестой серводвигатель Q5220 установлен на среднем рычаге Q5228, а силовой вал шестого серводвигателя Q5220 закреплен на переднем рычаге Q5231. Седьмой серводвигатель Q5227 закреплен на переднем конце переднего рычага Q5231, а третья электрическая рукоятка Q5232 закреплена на силовом валу седьмого серводвигателя Q5227. Винтовой двигатель рычага Q5223 установлен на U-образной подъемной раме Q5237, и винт конца вала винтового двигателя рычага Q5223 находится в резьбовом соединении с резьбовым отверстием в боковой поверхности соединительного элемента Q5224.
[00102] Робот доставки расходных материалов Q5 используется для транспортировки хирургических расходных материалов в интервенционной хирургии. Основание и подъемная часть в основном используются для реализации снятия и подъема робота. Основание управляет движением всего робота и включает в себя четыре группы колесных устройств, управляемых двигателями. Подъемная часть может поднимать или опускать высоту головного узла и руки системы. Головка и привод в основном используются для завершения идентификации системы и управления рукой. Головка является смотровой и выходной частью системы. Для наблюдения за внешней средой предусмотрены две камеры. Второй сенсорный экран предназначен для передачи информации пользователю и получения инструкций от пользователя, а также является управляющим элементом для пользователя. Голова может двигаться во всех направлениях для лучшего наблюдения за окружающей средой. Компонент руки используется для окончательного зажима объекта. Компонент руки может вытягиваться вперед и назад, а когда его нужно схватить, рука может разворачиваться. После завершения зажатия рука втягивается. Благодаря компоненту руки достигается захват расходного материала и вскрытие упаковки.
[00103] Преимуществом является то, что робот Q5 для доставки расходных материалов может использоваться с существующей системой управления расходными материалами. Также он может быть оснащен только одним комплектом системы управления расходными материалами и осуществлять беспроводную связь через bluetooth с системой управления расходными материалами, таким образом, достигается совместная работа.
[00104] Робот быстрой зарядки Q6, см. ФИГ. 14 и 15, быстро заряжает каждого робота в операционной и обеспечивает непрерывную работу каждого робота. Робот быстрой зарядки Q6 совмещен с зарядным боксом в зоне зарядки для использования, а зарядный бокс используется для зарядки аккумулятора и зарядки робота. Принят режим, при котором робот для быстрой зарядки автоматически заменяет батареи для других роботов. Весь процесс замены батареи происходит быстро, и замена батареи может быть завершена в течение одной минуты. После получения сигнала о необходимости замены батареи, зарядный робот может автоматически нести полностью заряженную батарею, подвозить ее к роботу, нуждающемуся в замене батареи, заменять оригинальную батарею робота на новую. Затем оригинальная батарея возвращается в зарядный бокс за пределами операционной и заряжается. Весь процесс может быть автоматически завершен роботом. В комплект также входят базовый блок, головной блок и блок туловища.
[00105] Зарядный бокс Q6100 расположен за пределами операционной (зона зарядки 9). Сенсорный экран Q6103 для взаимодействия человека и компьютера расположен на зарядном боксе Q6100. Управляющий узел расположен в корпусе зарядного бокса Q6100 и соединен с сетью, в которой размещен интервенционный хирургический робот. Сигнал о том, какому конкретному роботу необходимо заменить батарею, может быть получен, и сенсорный экран Q6103 принимает и выдает информацию и передает ее на управляющий узел для обработки и хранения данных. В корпусе установлен трансформатор для обеспечения стабильного и правильного питания. Внешняя часть хирургического робота снабжена множеством зарядных решеток Q6102 для зарядки, и десять зарядных решеток могут быть расположены в соответствии с требованиями хирургического робота для зарядки батареи. Каждая зарядная решетка Q6102 снабжена зарядным гнездом, совмещенным с разъемом батареи Q6105. Отверстие для зарядки робота расположено под зарядной решеткой Q6102. Робот быстрой зарядки Q6 является автоматическим шагающим роботом, находится в связи с управляющим узлом и используется для замены батареи для робота с низким зарядом батареи в интервенционном хирургическом роботе, помещая замененную батарею в отверстие зарядной решетки Q6102 для зарядки, и снабжен зарядной головкой Q6204, совмещенной с зарядным отверстием.
[00106] Во время зарядки зарядное отверстие в нижней части аккумулятора Q6105 соединяется с зарядным разъемом в зарядном боксе Q6100. Железный лист установлен на переднем конце аккумулятора Q6105, и железный лист может быть прикреплён и соединен с электромагнитом в зарядном боксе, так что аккумулятор фиксируется. Когда аккумулятор Q6105 помещается в зарядный элемент Q6102, система начинает автоматически заряжать аккумулятор до полной зарядки, автоматически отключает питание и выдает подсказку на сенсорном экране, и в то же время отправляет информацию на зарядный робот Q6200, чтобы робот мог быстро найти готовый аккумулятор. Система может поддерживать одновременную зарядку десяти групп батарей, что позволяет эффективно удовлетворять потребности в замене батарей множества роботов. Когда заряжаемый робот разряжен, его можно зарядить на зарядной платформе под зарядным боксом. На зарядном боксе установлены две группы зарядных станций, что позволяет одновременно заряжать два быстрозаряжаемых робота Q6.
[00107] Магистральное устройство используется для выталкивания и втягивания аккумулятора и подъема системы. Магистральное устройство может вытягиваться вперед-назад и вверх-вниз, и батарея выталкивается, когда это необходимо. После завершения действия положение может быть возвращено. Батарея может быть заменена при общем сотрудничестве системы.
[00108] Со ссылкой на ФИГ. 15, конкретно, включена опорная пластина Q6225, опорная пластина Q6225 расположена на шасси базового устройства, и верхняя часть опорной пластины Q6225 снабжена вмещающей решеткой Q62271, которая может перемещаться относительно вертикального направления. Вмещающая решетка Q62271 имеет две горизонтально расположенные вмещающие решетки. Одна из них используется для размещения полностью заряженной батареи Q6105 для транспортировки, а другая используется для размещения батареи Q6105 с низким зарядом. Вмещающая решетка Q62271 соединена с головным механизмом в его верхней части. Один конец соединительной пластины Q6227, который находится на расстоянии от головного механизма, выступает наружу, образуя соединительную пластину Q6227. Зажимной и толкающий механизм, который может перемещаться телескопически, расположен на соединительной пластине Q6227 относительно двух вмещающих решеток, и зажимной и толкающий механизм соединен с приводом.
[00109] Две стороны вмещающей решетки Q62271 закреплены на опорной плите Q6225. Две опоры Q6226 расположены на двух сторонах вмещающей решетки Q62271. Вертикальная линейная направляющая Q6224 закреплена на внутренней боковой поверхности каждой опоры Q6226. Первый скользящий блок соединен с каждой вертикальной линейной направляющей Q6224 в режиме скольжения, и первые скользящие блоки на двух группах опор Q6226 прикреплены к внешней стенке вмещающей решетки Q62271. Две стороны соединительной пластины Q6227 соответственно имеют первое резьбовое отверстие. На опорной плите Q6225 расположены два вертикальных компонента двигателя с винтовым стержнем Q6212, закрепленные на опорной плите Q6225. Винтовой стержень Q6228 совмещен с двумя первыми резьбовыми отверстиями, а компоненты двигателя вертикального винтового стержня Q6212 и Q6228 электрически соединены с драйвером. Таким образом, подъем завершается за счет взаимодействия узлов двигателя вертикального винтового стержня Q6212 и Q6228 и первых резьбовых отверстий на левой стороне и правой стороне соединительной пластины Q6227 соответственно.
[00110] Со ссылкой на ФИГ. 15, зажимной и толкающий механизм включает две группы горизонтальных линейных направляющих Q6216. Горизонтальные линейные направляющие Q6216 закреплены на соединительной пластине Q6227 и расположены за вмещающей решеткой Q62271. Вторая заслонка соединена с каждой горизонтальной линейной направляющей Q6216 скользящим образом, толкатель Q6211 прикреплен к каждой группе вторых заслонок, второе резьбовое отверстие образовано в нижней части каждого толкателя Q6211, а электромагнит расположен на конце каждого толкателя Q6211 и используется для прикрепления железных листов на батарее Q6105. Соединительная пластина Q6227 расположена снаружи двух групп горизонтальных линейных направляющих Q6216, и на ней закреплены два горизонтальных винтовых двигателя в сборе Q6229, ведущий винт горизонтального винтового двигателя в сборе Q6229 совмещен со вторым резьбовым отверстием, и ведущий винт электрически соединен с драйвером. Таким образом, горизонтальный винтовой двигатель в сборе Q6229 совмещен со вторым резьбовым отверстием, толкатель выдвигается и втягивается, а электромагнит на переднем конце толкателя совмещен с железным листом на батарее и используется для зажима батареи.
[00111] Робот для очистки Q7, см. ФИГ. 18 и 19, в основном включает три части, то есть базовое устройство Q7100, хоботное устройство Q7200 и компонент головы и руки Q7300. Все устройство может перемещаться в катетерной камере интервенционной операции, очистка поверхности в катетерной камере, катетерного ложа и других объектов завершается, и обеспечивается чистая и стерильная среда катетерной камеры.
[00112] Базовое устройство Q7100 в основном используется для реализации движения робота и завершения действий по уборке поверхности. Базовое устройство Q7100 включает в себя устройство перемещения, устройство подметания Q7101 и устройство протирки пола Q7102. Устройство перемещения используется для управления движением всего робота. Устройство подметания Q7101 используется для завершения подметания роботом и уборки мусора и пыли на поверхности, а устройство для протирки пола Q7102 используется для завершения протирки пола роботом. Устройство перемещения, устройство подметания пола Q7101 и устройство протирки пола Q7102 встроены в нижнюю плиту Q7103, а вертикальные стойки Q7104 для поддержки хоботного устройства Q7200 соответственно установлены на четырех углах верхней поверхности нижней плиты Q7103.
[00113] Устройство перемещения включает четыре комплекта колесных узлов, которые имеют одинаковую структуру и приводятся в движение двигателем. Один комплект колесных узлов описан ниже. Колесный узел включает в себя колесо Q7105, соединительную пластину Q7106, первый серводвигатель Q7107 и второй серводвигатель Q7108. Соединительная пластина колеса Q7106 имеет прямоугольную форму, а сквозное отверстие соединительной пластины колеса образовано в вертикальной пластине в нижней части соединительной пластины колеса Q7106. Первый серводвигатель Q7107 закреплен во внутреннем пространстве колесной соединительной пластины Q7106. Вал двигателя первого серводвигателя Q7107 проникает через сквозное отверстие соединительной пластины колеса и соединяется с колесом Q7105 на внешней стороне нижней вертикальной пластины, и первый серводвигатель Q7107 управляет движением вперед и назад колеса Q7105. В каждом из четырех углов нижней пластины Q7103 соответственно образовано монтажное отверстие для двигателя. Второй серводвигатель Q7108 закреплен в монтажном отверстии в соответствующем положении на нижней пластине Q7103. Вал двигателя второго серводвигателя Q7108 проникает через монтажное отверстие для соединения с верхней поперечной пластиной соединительной пластины колеса Q7106, и второй серводвигатель Q7108 управляет рулевым управлением колеса Q7105. Первый серводвигатель Q7107 согласован со вторым серводвигателем Q7108, и четыре колеса Q7105 движутся вместе, так что может быть реализовано разнонаправленное движение всего робота.
[00114] Магистральное устройство Q7200 в основном используется для поддержки и подъема робота и включает опорную плиту Q7210, а также устройство управления и питания, устройство управления подметанием пола, устройство управления протиркой пола и подъемное устройство, которые расположены на опорной плите Q7210. Нижняя часть опорной плиты Q7210 соединена с верхней частью вертикальной стойки Q7104. Оборудование управления и электропитания обеспечивает питание системы и используется в качестве центра обработки управляющей информацией всей системы. Устройство управления подметанием соединено с подметающим устройством Q7101 и используется для управления высотой подметающего устройства Q7101 и реализации различных режимов работы системы. Устройство управления протиркой пола соединено с устройством протирки пола Q7102 и используется для управления высотой устройства протирки пола Q7102 и реализации различных режимов работы системы. Подъемное устройство соединено с компонентом головы и руки Q7300 и используется для подъема или опускания высоты компонента головы и руки Q7300.
[00115] Компонент головы и руки Q7300 в основном используется для завершения идентификации системы и управления рукой, и включает в себя опору компонента головы и руки Q7301, головное устройство и компонент руки. Головное устройство и компонент руки расположены на опоре Q7301 компонента головы и руки, опора Q7301 компонента головы и руки соединена с подъемным устройством. Головное устройство является наблюдательным и выходным концом системы, а компонент руки используется для завершения зажима изделия. Головное устройство может перемещаться во всех направлениях для достижения лучшего обзора обстановки. Компонент руки используется для завершения зажима предметов. Компонент руки можно растягивать вперед и назад, а когда нужно захватить предмет, рука разворачивается. После зажатия рука втягивается. С помощью системы руки можно завершить очистку изделий на ложе катетера.
[00116] Базовое устройство и головное устройство каждого робота могут иметь одинаковую структуру, так что стоимость снижается, а взаимозаменяемость частей робота улучшается. Основание может реализовать автоматическую ходьбу, и 360 градусов вращения, и каждое отдельное движение может быть реализовано для головы или головного устройства, и удобно быстрое наблюдение обстановки. Каждый робот снабжен модулем связи, так что коммуникационные характеристики всей системы реализованы.
[00117] Что касается устройства для введения контрастного вещества, можно использовать электрический инжектор контрастного вещества, раскрытый в патенте CN215608391U.
[00118] Автоматическая тележка для перемещения 8, которая может быть существующей тележкой для перемещения, также может быть системой передачи с функцией автоматической зарядки, см. ФИГ. 20-22. Автоматическая тележка для перемещения 8 включает в себя тележку для перемещения 8100, устройство автоматической фиксации и автоматической зарядки (соответствующее зарядной стойке тележки для перемещения 81). Устройство автоматической фиксации и автоматической зарядки включает в себя оболочку, механизм фиксации 8304, механизм автоматической зарядки и бокс управления 8200. Оболочка скрыта и встроена в подполье 8101. Крышка 8316 оболочки может быть открыта, чтобы раскрыть вместительную полость, образованную в оболочке. Автоматический зарядный механизм и фиксирующий механизм 8304 размещены во вместительной полости и используются для автоматического выдвижения и фиксации тележки для перемещения. Автоматический зарядный механизм расположен в вмещающей полости, а зарядный штекер 8311 автоматического зарядного механизма соединен с внешним источником питания, может вытягиваться в вмещающую полость и используется для зарядки тележки для перемещения. Шкаф управления 8200 используется для отображения, хранения информации, установки параметров и обработки данных и соединен с механизмом автоматической зарядки и механизмом фиксации 8304. Схема может гарантировать зарядку автоматической тележки для перемещения, а затем гарантировать нормальную работу автоматической тележки для перемещения.
[00119] Устройство автоматического перемещения имеет крепежную часть в нижней части для установки механизма автоматической зарядки и крепежного механизма 8304, а также зарядную головку в нижней части для установки зарядной вилки 8311. Два полюса зарядной вилки 8311 соответственно соединены с токоведущим проводом и нулевым проводом сети электропитания, а также снабжены путевым выключателем для определения того, соединены ли эти два штекера.
[00120] В частности, дно устройства автоматического перемещения имеет четыре крепежных отверстия 8102, соответствующих четырем крепежным механизмам 8304. Зарядная головка 8110 расположена в флипе 8103 дна устройства автоматического перемещения. Флип 8103 открывается вниз, а датчик положения 8104 установлен на его соседней дверце. Датчик положения 8104 взаимодействует с базовой станцией датчика положения 8301. После того, как фиксирующие стержни крепежных механизмов 8304 вставляются в крепежные отверстия, устройство автоматического перемещения прочно фиксируется, так, что кузов устройства не может двигаться произвольно.
[00121] Датчик положения 8104 используется для взаимодействия с базовой станцией датчика положения 8301 и дополнения позиционирования устройства автоматического перемещения. После того, как устройство автоматического перемещения получает координаты базовой станции датчика положения 8301, подвижный корпус устройства управляется для перемещения, так что устройство автоматического перемещения достигает определенного положения.
[00122] Устройство DSA может быть реализовано с использованием существующих технологий.
[00123] В приведенном здесь описании ссылки на термин "одно воплощение", "некоторые осуществления", "пример", "конкретный пример" или "несколько примеров" и т.д. означают, что конкретный признак, структура, материал или характеристика, описанные в связи с осуществлением или примером, включены по меньшей мере в одно осуществление или пример изобретения. В данной спецификации схематические изображения терминов, используемых выше, не обязательно относятся к одному и тому же варианту осуществления или примеру. Кроме того, описанные конкретные признаки, структуры, материалы или характеристики могут быть объединены любым подходящим образом в любом одном или нескольких вариантах осуществления или примерах. Более того, различные варианты осуществления или примеры, описанные в данной спецификации, могут быть объединены и скомбинированы специалистами в данной области. Хотя выше были показаны и описаны варианты осуществления раскрытия, следует понимать, что вышеуказанные варианты осуществления являются примерными и не должны рассматриваться как ограничивающие раскрытие, и что вариации, модификации, замены и изменения могут быть сделаны в вышеуказанных вариантах осуществления специалистами в данной области техники в пределах объема раскрытия.


Изобретение относится к медицинской технике, а именно к интервенционной автоматизированной операционной системе. Интервенционная автоматизированная операционная система включает в себя катетерную камеру (1), представляющую собой зону интервенционной хирургии, которая снабжена ложем для катетера (101); камеру управления (2), смежную с катетерной камерой и снабженную расположенным между ними смотровым окном (201); роботов, включающих робота интервенционной хирургии (Q1), управляющего робота (Q2), робота для пункции (Q3) и робота для замены катетера и направляющей (Q4), совмещенных друг с другом и расположенных в камере катетера (1). Ложе для катетера (101) снабжено устройством DSA (цифровая субтракционная ангиография) (3) и устройством для введения контрастного вещества (4). Устройство мониторинга (5) расположено в камере управления (2) и выполнено с возможностью связи с роботами, устройством DSA (3) и устройством введения контрастного вещества (4). Устройство мониторинга (5) сконфигурировано для отображения информации каждого устройства и робота, синхронного обновления в реальном времени и наблюдения за врачами. Контроллер (6) расположен в камере управления (2) и выполнен с возможностью использования для человеко-машинного взаимодействия между врачом и роботом. Техническим результатом является предотвращение вреда от излучения в течение длительного времени в процессе операции DSA и уменьшение влияния интервенционной операции на здоровье врача.
9 з.п. ф-лы, 23 ил.
1. Интервенционная автоматизированная операционная система, характеризующаяся тем, что включает в себя:
катетерную камеру (1), причем катетерная камера (1) представляет собой зону интервенционной хирургии, которая снабжена ложем для катетера (101);
камеру управления (2), смежную с катетерной камерой и снабженную расположенным между ними смотровым окном (201);
роботов, включающих робота интервенционной хирургии (Q1), управляющего робота (Q2), робота для пункции (Q3) и робота для замены катетера и направляющей (Q4), совмещенных друг с другом и расположенных в камере катетера (1);
при этом ложе для катетера (101) снабжено устройством DSA (3) и устройством для введения контрастного вещества (4);
устройство мониторинга (5) расположено в камере управления (2) и выполнено с возможностью связи с роботами; устройством DSA (3) и устройством введения контрастного вещества (4), а устройство мониторинга (5) сконфигурировано для отображения информации каждого устройства и робота, синхронного обновления в реальном времени и наблюдения за врачами; и
контроллер (6) расположен в камере управления (2) и выполнен с возможностью использования для человеко-машинного взаимодействия между врачом и роботом.
2. Интервенционная автоматизированная операционная система по п. 1, отличающаяся тем, что содержит палату (7) для отдыха пациента, смежную с катетерной камерой (1).
3. Интервенционная автоматизированная операционная система по п. 2, отличающаяся тем, что автоматическая тележка (8) выполнена с возможностью перемещения между палатой (7) и катетерной камерой (1) для автоматического перемещения пациента.
4. Интервенционная автоматизированная операционная система по п. 3, отличающаяся тем, что в палате (7) установлен зарядный пост (81) для зарядки автоматической тележки (8).
5. Интервенционная автоматизированная операционная система по п. 1, отличающаяся тем, что робот дополнительно включает в себя робота доставки расходных материалов (Q5); робот доставки расходных материалов (Q5) выполнен с возможностью записи информации о хирургических расходных материалах для доставки хирургических расходных материалов в катетерную камеру (1), которая коммуникативно связана с устройством мониторинга (5) и контроллером (6).
6. Интервенционная автоматизированная операционная система по п. 1, отличающаяся тем, что робот дополнительно включает робота зарядки (Q6), причем робот зарядки (Q6) коммуникативно связан с роботами для замены разряженных батарей.
7. Интервенционная автоматизированная операционная система по п. 6, отличающаяся тем, что снаружи катетерной камеры (1) предусмотрена зона зарядки (9) для зарядки разряженной батареи, а в зоне зарядки (9) предусмотрено место для зарядки робота зарядки (Q6).
8. Интервенционная автоматизированная операционная система по любому из пп. 1-7, отличающаяся тем, что дополнительно включает робота для очистки(Q7), находящегося в связи с контроллером (6), причем робот для очистки (Q7) сконфигурирован для автоматической очистки катетерной камеры (1) после завершения процедуры.
9. Интервенционная автоматизированная операционная система по любому из пп. 1-7, отличающаяся тем, что устройство мониторинга (5) включает в себя экраны (51), поддерживаемые опорами (52).
10. Интервенционная автоматизированная операционная система по любому из пп. 1-7, характеризующаяся тем, что робот выполнен с приоритетом полномочий, и управляющий робот (Q2) имеет наибольшие полномочия, являясь управляющим при выполнении операции, и выполнен с возможностью диагностики изображения, инструктирования роботов для их согласованной работы.
| Planning a Cardiovascular Hybrid Operating Room: the Technical | |||
| The heart surgery forum | |||
| Vol | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| CN 108324378 A, 27.07.2018 | |||
| US 2016317242 A1, 03.11.2016 | |||
| CN 112120792 A, 25.12.2020 | |||
| US 2021219927 A1, 22.07.2021 | |||
| WO 2020089935 A1, 07.05.2020 | |||
| US 20220143232 A1, 12.05.2022 | |||
| СИСТЕМА ПИТАНИЯ АВТОМОБИЛЯ НА СЖИЖЕННОМ ГАЗЕ | 2008 |
|
RU2384715C1 |
| ПЕРЕОБОРУДОВАНИЕ ОПЕРАЦИОННОЙ КОМНАТЫ В ЛЕЧЕБНОМ УЧРЕЖДЕНИИ | 2006 |
|
RU2452452C2 |
