Область техники
Настоящее изобретение относится к ручному бытовому электрическому прибору.
Предпосылки создания изобретения
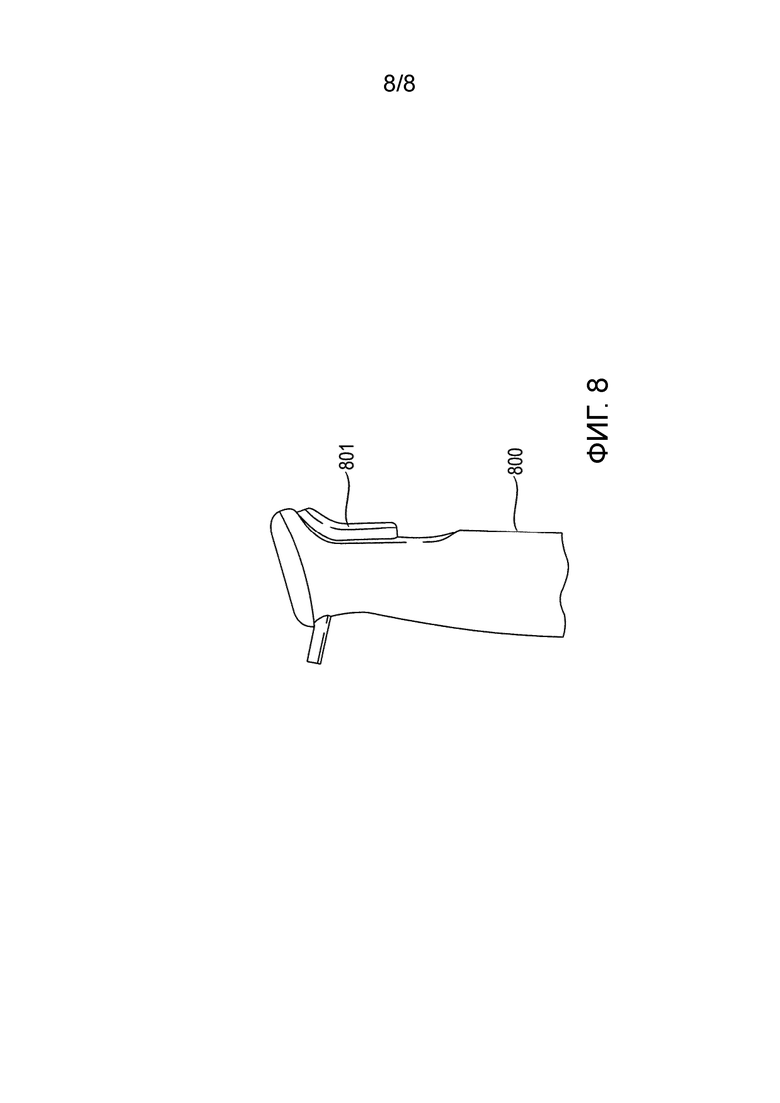
Ручные бытовые приборы с электрическим приводом, такие как ручные блендеры, в настоящее время используются во многих домах и на кухнях. Ручной блендер такого типа, как ручной блендер, описанный в EP2571037 A1, обычно имеет переключатель скорости для бесступенчатого управления частотой вращения электродвигателя, который приводит в действие блендер. Посредством переключателя скорости или контроллера, в дальнейшем обычно называемого управляющим элементом, можно регулировать скорость или частоту вращения двигателя от полной остановки до максимальной частоты вращения. Регулирование выполняется в соответствии с траекторией перемещения или рабочим ходом управляющего элемента, такой как глубина нажатия переключателя скорости или усилие, приложенное к регулятору скорости, как правило постепенно или непрерывно. Часть ручного блендера предшествующего уровня техники показана на фиг. 8, при этом ссылочная позиция 801 обозначает переключатель скорости ручного блендера 800.
Ручной бытовой прибор с электрическим приводом такого типа, как ручной блендер предшествующего уровня техники, имеет проблему, а именно в том, что рабочий ход (например, глубина нажатия) регулятора скорости относительно невелик, но в то время необходимо контролировать большой диапазон частоты вращения электродвигателя от нуля до максимальной частоты. Это затрудняет пользователю прибора выбор и выдерживание конкретного управления, такого как конкретная частота, предпочитаемая пользователем или которая является идеальной для конкретного приложения или процесса.
Другая проблема, связанная с обычными ручными бытовыми приборами с электрическим приводом, такими как ручной блендер, заключается в том, что при неизменном положении управляющего элемента (например, при постоянной глубине нажатия) частота может изменяться из-за изменения нагрузки в результате воздействия обрабатываемого продукта (такого как пищевой продукт, подлежащий измельчению), и это может привести к нежелательному результату обработки. Изменение нагрузки такого типа может возникать, например, при обработке пастообразных, вязких пищевых продуктов, которые формируют комки, таких как тесто, мед, густые супы, а также при применениях кухонного прибора, когда пищевые продукты загружаются неравномерно (например, при нарезке тонких ломтиков, терке, выжимании сока, приготовлении фарша), при этом требуемый начальный момент вращения очень высок, а затем требуемый момент вращения значительно уменьшается.
Документ DE 19742916 А1 относится к органу управления для электродвигателя, работающего от сети питания, с двумя разъемами сети питания, в частности, встроенными в переносной и/или ручной прибор, при этом упомянутый электродвигатель имеет по меньшей мере два соединительных вывода сети питания. Здесь чтобы избежать перегрузок электродвигателя и уменьшить производственные усилия и величину требуемого для установки пространства, орган управления с помощью двух соединительных выводов сети питания соединен с двумя разъемами сети питания, микроконтроллером, и при этом создан переключатель привода.
Документ 10 2008 040935 A1 показывает кухонный прибор с электродвигателем, частота вращения которого является переменной, для приведения в действие обрабатывающего инструмента, при этом кухонный прибор содержит детекторное средство для детектирования частоты вращения электродвигателя и по меньшей мере один визуальный дисплейный элемент, который может быть приведен в действие детекторным средством, для отображения частоты вращения электродвигателя. Визуальный дисплейный элемент может быть приведен в действие детекторным средством таким образом, что интенсивность дисплейного элемента с показанием, отличным от нуля, изменяется по меньшей мере в пределах назначенного визуальному дисплейному элементу диапазона частоты вращения в зависимости от частоты вращения электродвигателя.
Задача изобретения
Поэтому желательно обеспечить улучшенный ручной бытовой прибор с электрическим приводом, который разрешает по меньшей мере одну из вышеупомянутых проблем и приводит к улучшенному управлению или приведению в действие этого ручного бытового прибора с электрическим приводом или его электродвигателя.
Решение задачи
Одно решение этой задачи обеспечено ручным бытовым прибором с электрическим приводом, который имеет признаки, приведенные в п. 1 формулы изобретения.
Этот ручной бытовой прибор с электрическим приводом содержит электродвигатель для приведения в действие бытового прибора, блок управления для управления электродвигателем, первый управляющий элемент для выдачи на блок управления первого сигнала управления для того, чтобы выбрать режим управления электродвигателем, второй управляющий элемент для выдачи на блок управления второго сигнала управления, причем блок управления выполнен с возможностью выбора режима привода электродвигателя из предусмотренных режимов привода электродвигателя на основании первого сигнала управления, и блок управления выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель, на основании выбранного режима привода электродвигателя и второго сигнала управления.
Таким образом, электродвигатель может активизироваться или приводиться в действие сигналом привода электродвигателя, такого как прилагаемое напряжение, момент вращения или частота вращения, которые следует использовать в зависимости от выбора предусмотренного режима привода электродвигателя.
При обеспечении различных режимов привода электродвигателя здесь стало возможным управлять частотой вращения или напряжением, которое следует прилагать к электродвигателю, более точно в зависимости от требований пользователя.
Режимы привода электродвигателя определяют здесь, например, различные кривые или профили привода, то есть соотношения между рабочим ходом второго управляющего элемента и значением привода или приведения в действие (таким как выдаваемое напряжение или частота вращения электродвигателя или частота вращения вала, связанного с лезвиями ручного блендера), или также разные максимальные значения привода и/или минимальные значения привода.
Тем самым режим привода электродвигателя с соответствующим профилем привода, который является наиболее подходящим для соответствующего рабочего процесса или, например, для соответствующего подлежащего обработке продукта, может быть выбран пользователем, и это делает возможным более точное приведение в действие электродвигателя или управление им.
Соответственно, в ручном бытовом приборе с электрическим приводом с помощью второго управляющего элемента при выборе соответствующего режима привода электродвигателя стали возможны более точное приведение в действие электродвигателя или управление им. С одной стороны, это облегчает пользование прибором, а, с другой стороны, приводит к улучшенному результату обработки продуктов.
Соответствующий способ управления ручным бытовым прибором с электрическим приводом включает в себя этапы получения первого сигнала управления от первого управляющего элемента, чтобы выбрать режим управления электродвигателем; получения второго сигнала управления от второго управляющего элемента; выбора режима привода электродвигателя из предусмотренных режимов привода электродвигателя на основе первого сигнала управления; определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель, на основании выбранного режима привода электродвигателя и второго сигнала управления.
Дополнительное развитие и его преимущества
Второй сигнал управления, выдаваемый вторым управляющим элементом, предпочтительно зависит от рабочего хода второго управляющего элемента.
Это делает возможным выдачу сигнала в соответствии с рабочим ходом управляющего элемента, и таким образом, например, в соответствии с глубиной нажатия или в соответствии с усилием, оказываемым вторым управляющим элементом. Рабочий ход или соответствующий сигнал, с одной стороны, может быть непрерывным или бесступенчатым, а, с другой стороны, иметь несколько ступеней (предпочтительно, более двух ступеней).
Заданные режимы привода электродвигателя, предпочтительно, включают в себя также по меньшей мере один из: первого режима привода электродвигателя с первым максимальным значением привода для привода электродвигателя, причем блок управления выполнен с возможностью определения сигнала привода электродвигателя, выдаваемого на электродвигатель, на основании второго сигнала управления и первого максимального значения привода; второго режима привода со вторым максимальным значением привода для привода электродвигателя, отличным от первого максимального значения привода, причем блок управления выполнен с возможностью определения сигнала привода электродвигателя, выдаваемого на электродвигатель, на основании второго сигнала управления и второго максимального значения привода; и/или первого импульсного режима с первой формой импульсов сигнала привода для привода электродвигателя, причем блок управления выполнен с возможностью определения сигнала привода электродвигателя, выдаваемого на электродвигатель, на основании второго сигнала управления и первой формы импульсов.
При обеспечении одного или более вышеуказанных режимов привода, предпочтительно двух или более, дополнительно улучшается управление прибором пользователем. Здесь могут быть обеспечены, например, первый и второй режимы привода, которые соответственно различны между собой в том, что касается максимального значения привода. Здесь максимальное значение может быть, например, максимальным значением прилагаемого напряжения, максимальным значением вращающего момента или максимальным значением частоты вращения электродвигателя (или вала электродвигателя). Следовательно, режим этого типа может быть адаптирован для низких частот вращения, например, при выборе низкого максимального значения, чтобы обеспечить медленное разбивание или измельчение продукта при одновременной высокой точности выбора частоты вращения, потому что рабочий ход второго управляющего элемента должен быть представлен на меньшем диапазоне значений привода. Обеспечение импульсного режима (или ряда разных импульсных режимов) наделяет обработку определенных продуктов дополнительными преимуществами (например, более равномерное измельчение) и обеспечивает дополнительное улучшение результата обработки. Представляемые импульсные программы и формы импульсов могут также иметь непостоянный ход или последовательность во времени и отличаться от последовательностей кривых постоянных значений с заданной максимальной мощностью.
Максимальное значение привода также предпочтительно является максимальным прилагаемым напряжением, максимальным моментом вращения или максимальной частотой вращения электродвигателя.
Выбранное максимальное значение привода может относиться соответственно к прилагаемому напряжению, максимальному моменту вращения или к максимальной частоте вращения. При выборе в качестве максимального значения конкретной максимальной частоты вращения дополнительно улучшается приведение в действие электродвигателя или управление им, даже если имеется изменение, например, консистенции подлежащего обработке продукта, поскольку конкретная максимальная частота вращения при изменении нагрузки не превышается. То же самое относится соответственно к другим продуктам при использовании максимального момента вращения или прилагаемого напряжения.
Также предпочтительно, чтобы в импульсном режиме блок управления был выполнен с возможностью управлять шириной импульсов в зависимости от рабочего хода второго управляющего элемента, переключать между выключенным состоянием и приводом электродвигателя с формой импульсов в соответствии с приведением в действие второго управляющего элемента, управлять амплитудой импульсов в зависимости от рабочего хода второго управляющего элемента, управлять частотой следования импульсов в зависимости от рабочего хода второго управляющего элемента, управлять коэффициентом заполнения, включением/выключением, формой импульсов в зависимости от рабочего хода второго управляющего элемента; или управлять их комбинацией в соответствии с рабочим ходом.
При активизации соответствующего параметра для обработки в зависимости от обрабатываемого продукта результат обработки может быть дополнительно улучшен.
Также предпочтительно, чтобы форма импульса в импульсном режиме представляла собой одну из пилообразного импульса (необязательно с различными скоростями увеличения, градиентами), синусоидального импульса, прямоугольного импульса, трапецеидального импульса или импульса любой формы.
В соответствии с выбранным продуктом или с требуемым результатом обработки различные формы импульсов обеспечивают улучшенные результаты обработки обрабатываемого продукта.
Также предпочтительно, чтобы в первом и во втором режимах привода электродвигателя имелось соотношение между вторым сигналом управления и значением привода между минимальным значением и первым или вторым максимальным значением в виде одного из: линейного соотношения; экспоненциального соотношения; ступенчатого соотношения; любого криволинейного соотношения.
Для того чтобы обеспечить хорошую активизацию диапазона приводного напряжения, необязательно одновременно обеспечивая использование полного приводного диапазона, выбираются различные кривые привода, и, таким образом, различные зависимости между вторым сигналом управления и значением привода между минимальным и максимальным значением привода соответствующего режима.
Также предпочтительно, чтобы бытовой прибор содержал измерительное устройство для измерения частоты вращения электродвигателя, причем блок управления выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель, также на основании измеренной частоты вращения электродвигателя.
Это делает возможным управление или регулирование работы электродвигателя посредством частоты вращения электродвигателя или, например, посредством частоты вращения вала, соединенного с лезвиями ручного блендера, и, таким образом, предотвращение флуктуаций, обусловленных изменением нагрузки, вызванной, например, изменением консистенции продукта или обрабатываемой пищи.
Одновременно обеспечивается более точное приведение в действие электродвигателя пользователем, поскольку заданный сигнал управления или заданное значение сигнала управления и, таким образом, заданный рабочий ход второго управляющего элемента связан с заданной частотой вращения так, что может быть выборочно активизирована заданная частота вращения.
Предпочтительно соответствующий способ также включает этап: измерения посредством измерительного устройства частоты вращения электродвигателя на этапе определения подлежащего выдаче на электродвигатель сигнала привода электродвигателя, также определяемого на основании измеренной частоты вращения электродвигателя.
Краткое описание чертежей
Чертежи показывают следующее:
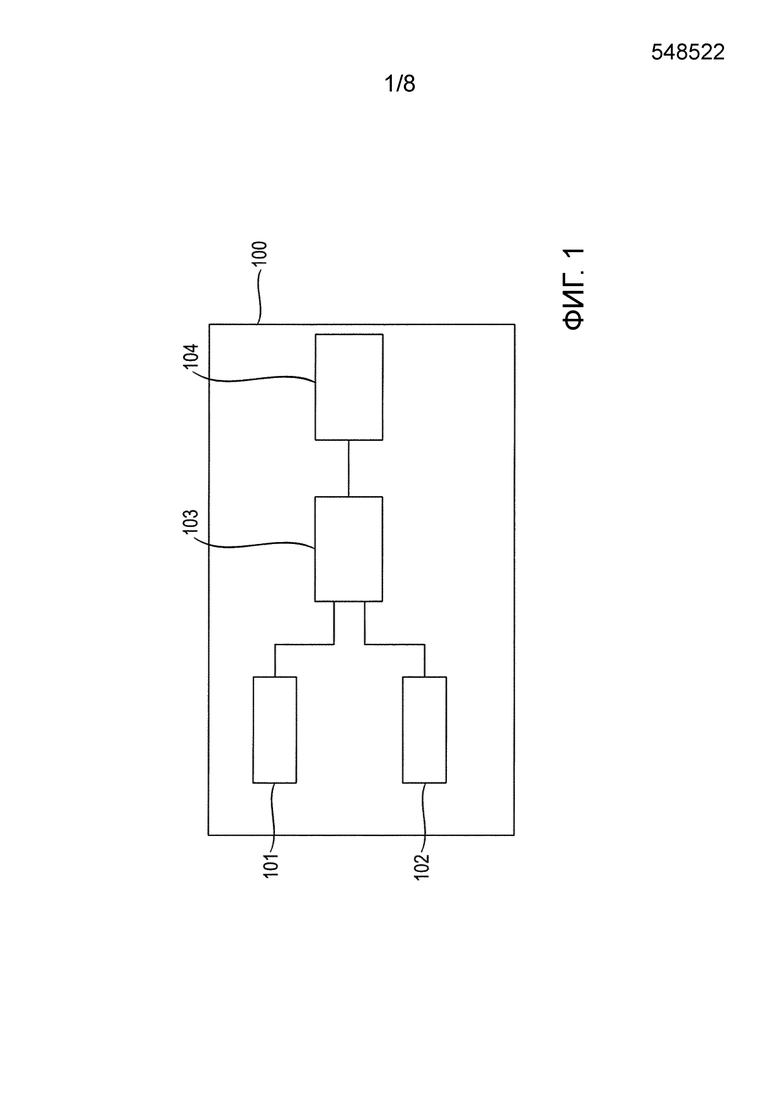
фиг. 1: общий принцип ручного бытового прибора с электрическим приводом в соответствии с изобретением;
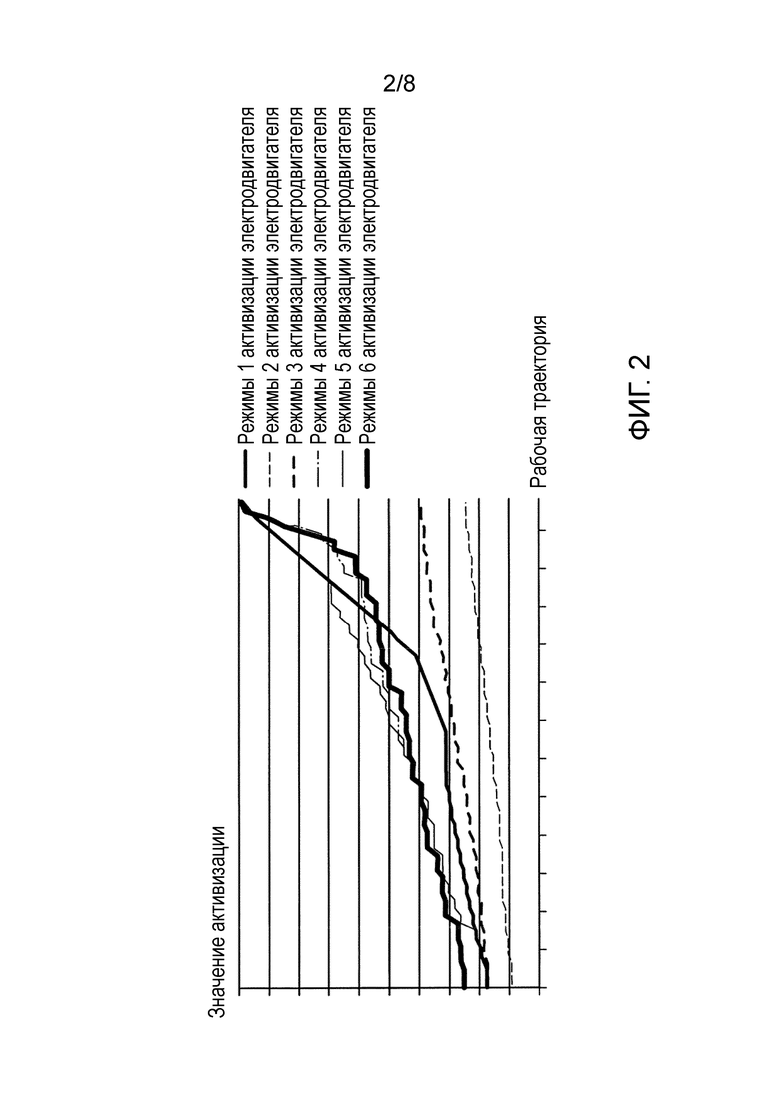
фиг. 2: возможные кривые привода для различных режимов привода;
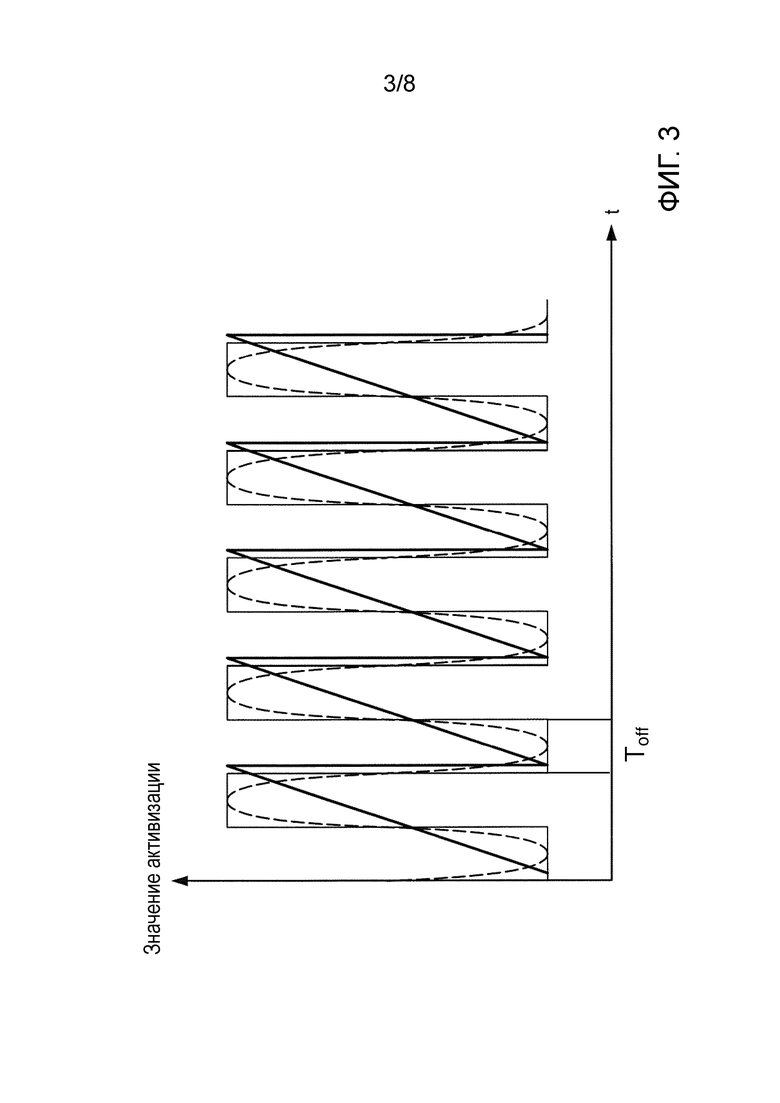
фиг. 3: возможные кривые привода для импульсных режимов;
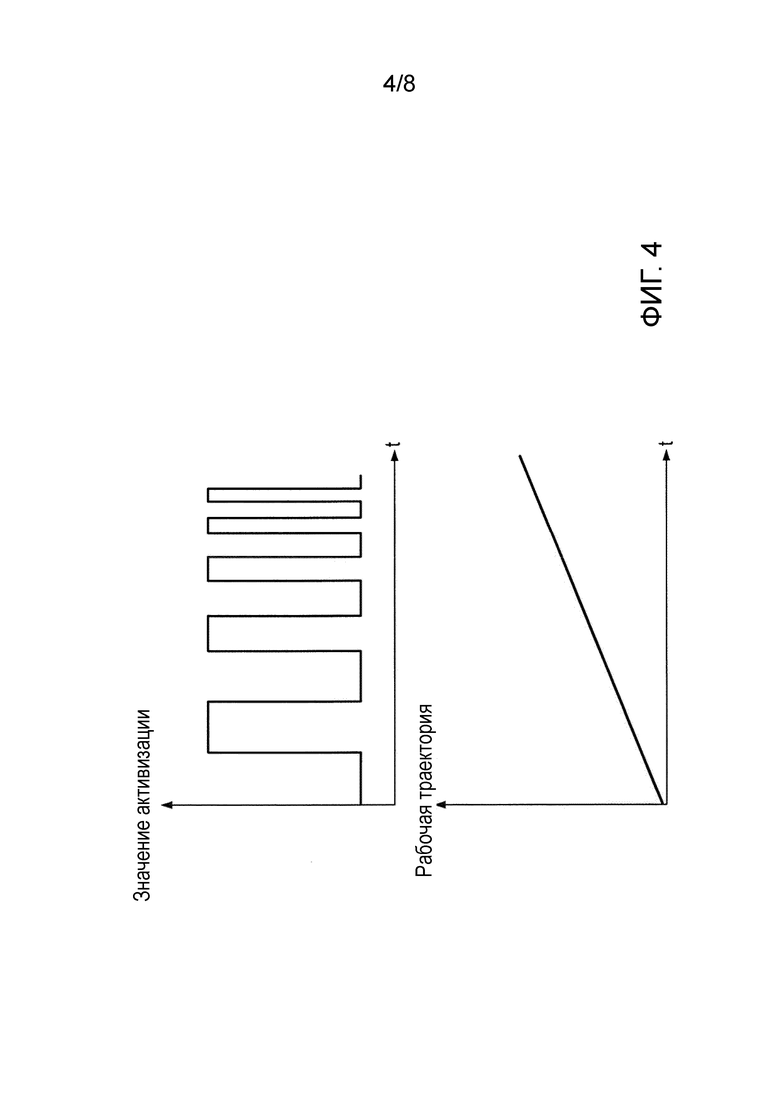
фиг. 4: взаимосвязь рабочего хода с шириной импульса в режиме привода;
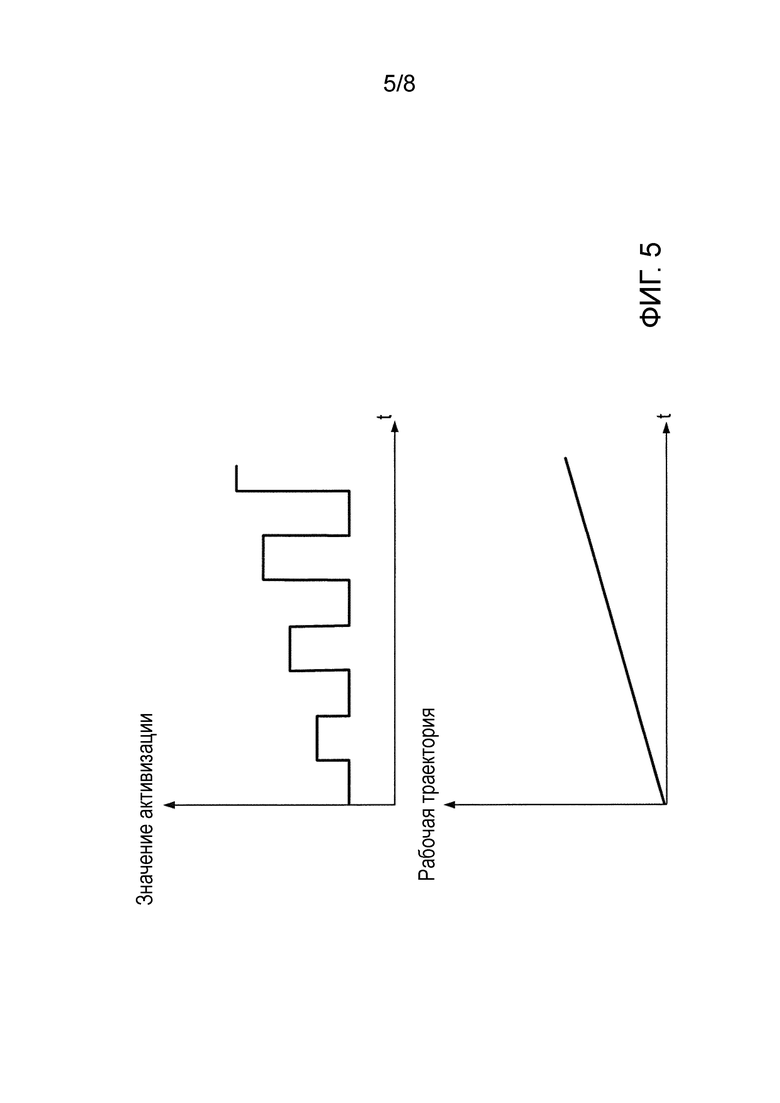
фиг. 5: взаимосвязь рабочего хода с амплитудой в режиме привода;
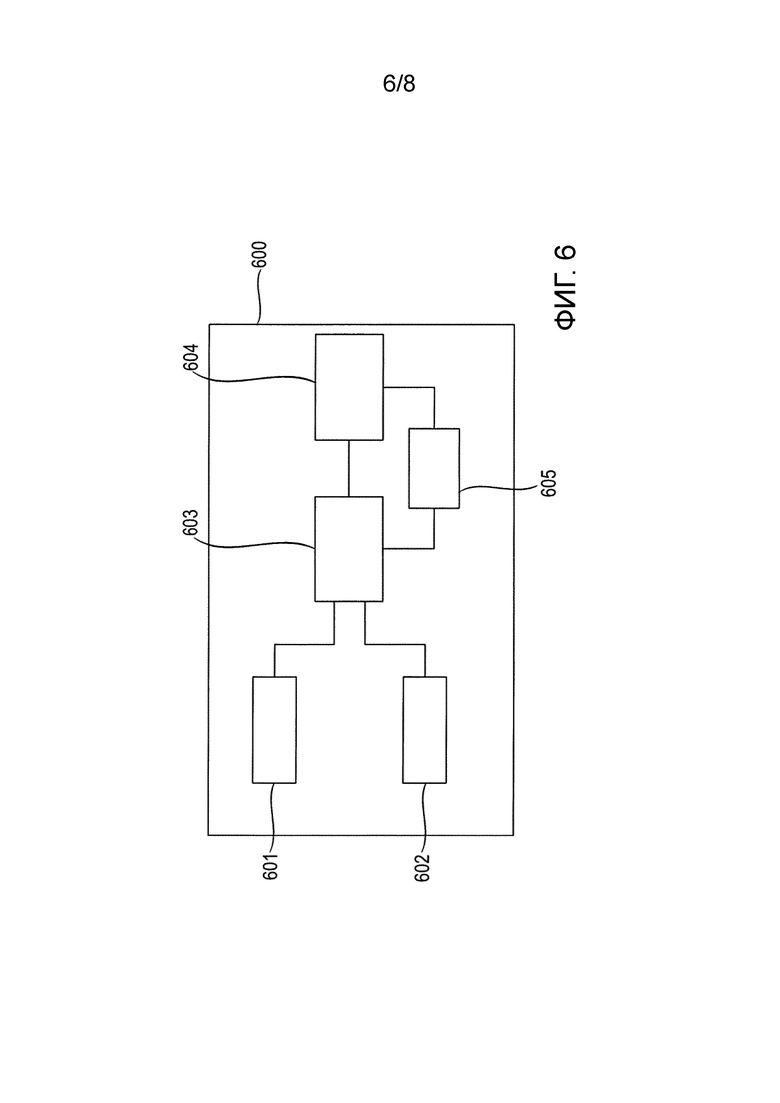
фиг. 6: другой вариант осуществления ручного бытового прибора с электрическим приводом в соответствии с изобретением;
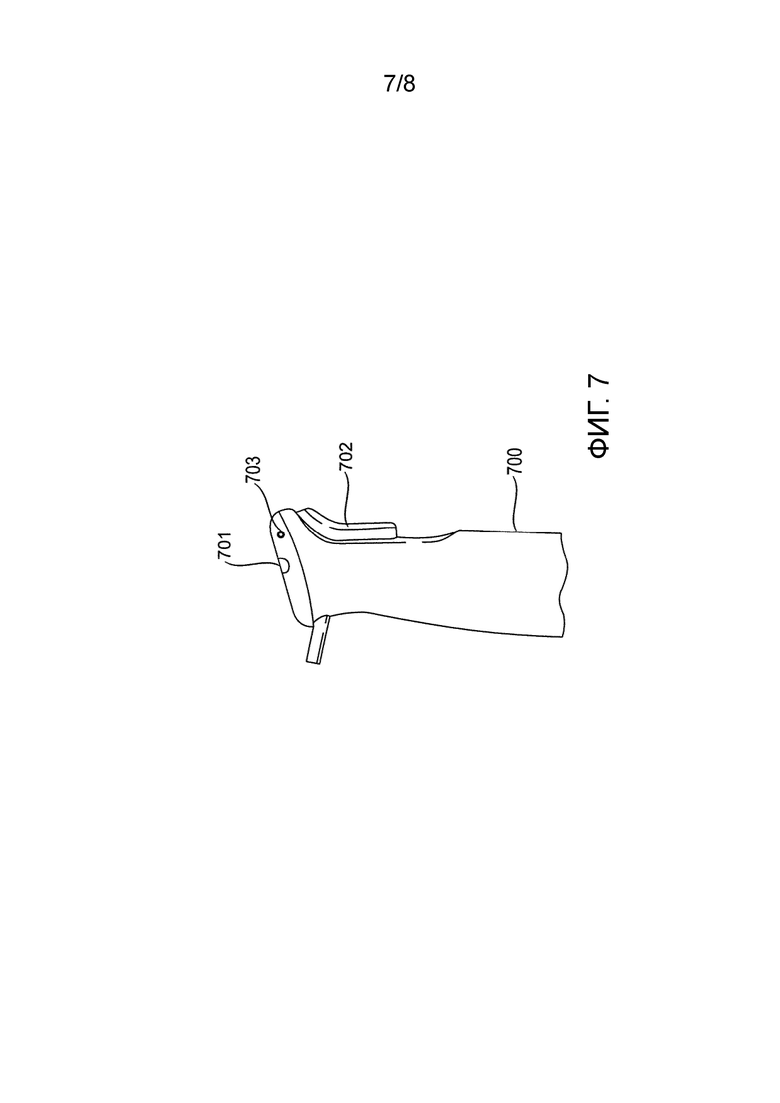
фиг. 7: иллюстрация части ручного блендера в соответствии с изобретением;
фиг. 8: иллюстрация части ручного блендера предшествующего уровня техники.
Основной принцип изобретения
Фиг. 1 показывает основной принцип изобретения. Далее со ссылкой на эту фигуру будет более подробно пояснен основной принцип.
Ручной бытовой прибор 100 с электрическим приводом, такой как ручной блендер, содержит первый управляющий элемент 101, второй управляющий элемент 102, блок управления 103 и электродвигатель 104. Первый управляющий элемент 101 служит для выдачи первого сигнала управления, чтобы выбирать режим управления электродвигателем. В качестве такого типа первого управляющего элемента может использоваться кнопка или переключатель с рядом положений для выбора ряда режимов. Возможный вариант осуществления первого управляющего элемента 701 можно увидеть на фиг. 7.
Сигнал управления в виде выходного сигнала первого управляющего элемента выдается на блок 103 управления, который осуществляет соответствующее управление или регулирование, как будет описано далее.
Второй управляющий элемент, который выдает второй сигнал управления, может быть выполнен, например, в виде кнопки, которая выдает сигнал, соответствующий рабочему ходу или траектории перемещения кнопки. Здесь рабочий ход или траектория перемещения может быть, например, глубиной нажатия кнопки или усилием, оказываемым на кнопку. Кроме того, рабочим ходом может быть также, например, наклон или угловое положение управляющего элемента или также траектория смещения ползункового переключателя. Сигнал такого типа, который зависит от рабочего хода, может быть подстроен под непрерывный или, альтернативно, ступенчатый, и эта ступенчатая форма предпочтительно имеет более двух ступенек. Предпочтительно также, чтобы рабочий ход кнопки мог быть реализован непрерывно и, альтернативно, также без ступенек, при этом может выдаваться сигнал, соответствующий этому рабочему ходу.
Один возможный вариант осуществления второго управляющего элемента 702 можно видеть на фиг. 7.
Блок управления 103 получает сигналы управления от первого и второго управляющих элементов и использует их, чтобы определить сигнал привода электродвигателя, подлежащий выдаче на электродвигатель. С этой целью из множества различных режимов привода электродвигателя посредством сигнала управления, выданного первым управляющим элементом, прежде всего выбирается режим управления электродвигателем. Такой выбор может осуществляться, например, несколькими нажатиями одной рукой первого управляющего элемента до достижения требуемого режима управления электродвигателем или в соответствии с выбранным положением ползункового переключателя.
Выдача текущего выбранного режима пользователю может осуществляться посредством уведомления (на фиг. 1 не показано), например, в виде отображения, звукового сигнала или с помощью одного или более светодиодов. Один возможный вариант в виде отдельных светодиодов 703 можно увидеть на фиг. 7. Здесь выбранный режим может быть представлен, например, многократным миганием светодиодов в соответствии с номером выбранного режима, а также различными цветами.
При этом каждый режим привода электродвигателя имеет различную взаимосвязь или различное представление, или ассоциацию второго сигнала управления (или его значения) со значением привода.
Эти режимы управления электродвигателем могут отличаться между собой, например, по профилю или последовательности профиля представления второго сигнала управления (или его значения) со значением привода, или также в другом минимальном или максимальном значении привода.
Если первым управляющим элементом из множества режимов привода электродвигателя был выбран соответствующий режим привода электродвигателя, то посредством этого режима привода и сигнала управления, полученного от второго управляющего элемента, выполняется определение сигнала привода электродвигателя.
Значение привода здесь определяется по рабочему ходу управляющего элемента (или положению рабочего хода), указанному сигналом управления, и по выбранному режиму управления электродвигателя, который устанавливает корреляцию между рабочим ходом и значением привода для привода электродвигателя 104 или управления им (значение привода).
Определение сигнала привода электродвигателя, подлежащего выдаче на электродвигатель, теперь осуществляется посредством значения привода, определенного выбранным режимом привода электродвигателя и рабочим ходом. Здесь блок управления определяет сигнал, который подлежит подаче на электродвигатель, чтобы достичь требуемого значения привода, или который приводит к управлению электродвигателем или к его регулированию в соответствии с требуемым значением привода.
Другими словами, сигнал привода электродвигателя определяется работой электродвигателя в соответствии с заданным значением привода.
Понимают, что под значением привода здесь подразумевается, например, одно из частоты вращения, момента вращения, приложенного к электродвигателю напряжения или мощности. Специалисту в данной области известны и другие значения привода или параметры привода, которые соответствующим образом могут быть приложены к электродвигателю.
Сигналом привода электродвигателя, в свою очередь, может быть, например, напряжение, которое необходимо приложить к электродвигателю. Однако сигнал привода электродвигателя этим не ограничен, и им может быть также сигнал управления для управления по фазе, управления по току, по частоте, по напряженности поля возбуждения, по частоте поля и т.д. В этой связи, специалисту в данной области известны различные возможности для привода электродвигателя, чтобы достичь требуемого значения привода (например, требуемой частоты вращения), при приведении в действие электродвигателя соответствующим образом (например, приложением соответствующего напряжения, фазовым управлением, управлением по току, по частоте, по напряженности поля возбуждения, по частоте поля и т.д.).
Соответствующий сигнал привода электродвигателя выдается на электродвигатель ручного бытового прибора с электрическим приводом или на блок, обеспеченный для управления напряжением.
В этом типе режима привода электродвигатель приводится в действие блоком управления таким образом, что электродвигатель работает в соответствии с сигналом привода.
Ниже более подробно поясняются используемые профили и подробное описание возможных режимов привода и их вариант реализации.
Выбором режима привода электродвигателя из ряда режимов привода обеспечено точное и надежное управление или регулирование электродвигателя или сигнала привода электродвигателя, несмотря на небольшой рабочий ход или траекторию перемещения второго управляющего элемента.
Варианты осуществления изобретения
Ниже со ссылками на сопроводительные чертежи более подробно описаны предпочтительные варианты осуществления настоящего изобретения. При этом одинаковые или соответствующие компоненты на разных чертежах обозначены одинаковыми или подобными ссылочными позициями.
Фиг. 2 в качестве примера показывает здесь различные кривые или последовательности возможных режимов привода электродвигателя. По оси X отложен рабочий ход управляющего элемента. По оси Y отложено значение привода. Обе координатные оси показаны без единиц измерения. Как уже упоминалось выше, рабочий ход на оси X может представлять, например, глубину нажатия кнопки или оказываемое на кнопку усилие в соответствующих единицах или в виде процентов от максимального значения. То же самое применимо к значению привода, отложенному по оси Y. Оно тоже может быть отложено в соответствующих единицах или в виде процентов от максимального значения.
Как можно понять на примере из графика по фиг. 2, режимы привода электродвигателя различаются, например, по соответствующему максимальному значению значения привода (максимальному значению привода) для привода электродвигателя и управления им. Как указано выше, соответствующее максимальное значение привода, с одной стороны, может быть здесь максимальной частотой вращения или максимальной скоростью электродвигателя или связанной оси, или максимальным моментом вращения. С другой стороны, максимальное значение может также представлять заданное максимальное напряжение, которое следует приложить к электродвигателю, или некоторое другое значение привода, такое как максимальная мощность, максимальный ток или подобное. Максимальные значения привода могут быть определены здесь в соответствующих единицах или в процентах от опорного значения. В этой связи во втором режиме, который следует за первым 100% режимом, максимальное значение привода также может быть при уменьшенной максимальной частоте вращения, составляющей 10%-90%, предпочтительно 30%-70%, а более предпочтительно 40-60% от максимальной частоты вращения. Таким образом частота вращения может быть лучше отрегулирована в большом диапазоне привода.
Однако, как также можно увидеть, различные режимы привода электродвигателя могут отличаться по своему минимальному значению привода, при этом первый режим привода электродвигателя имеет минимальное значение, которое отличается от минимального значения второго режима привода электродвигателя.
Более того, кривая или последовательность корреляции между рабочим ходом, таким как глубина нажатия кнопки или усилие, оказываемое на второй рабочий элемент, и соответствующим значением (значением привода) между минимальным значением и максимальным значением, и, таким образом, кривая или профиль между минимальным значением и максимальным значением соответствующих режимов привода могут быть сконфигурированы различным образом.
Кривая режима привода электродвигателя, обозначенная на фиг. 2 как 2, таким образом, например, почти линейная. В этой связи, приблизительно линейный ход может включать в себя также подъемы кривой, как это видно в одном варианте осуществления, аппроксимация которых представляет собой прямую линию. Возможный вариант осуществления кривой профиля этого типа режима привода электродвигателя представляют собой другие кривые профиля, такие как приблизительно экспоненциальная кривая, которая частично присутствует в режиме 1 привода электродвигателя. Могут быть образованы также комбинации между линейными кривыми и экспоненциальными кривыми или подобными, как показано в виде режима 1 привода электродвигателя.
Таким образом, в зависимости от кривой профиля, возникают различные назначения и соответствия второго сигнала управления или его значений с возможными значениями привода.
Теперь со ссылкой на фиг. 3 будут описаны дополнительные возможные режимы привода в виде одного или более (по-разному сформированных) импульсных режимов.
В одном импульсном режиме (требуемое) значение привода имеет импульсную кривую во времени. Соответственно, электродвигатель приводится в действие блоком управления таким образом, что этот электродвигатель работает в соответствии со значением привода, которое изменяется во времени в импульсной форме и имеет во времени импульсную кривую.
В связи с этим один или более режимов привода могут быть в виде импульсных режимов.
Как можно увидеть, например, из фиг. 3, этот тип кривой значения привода или управления электродвигателем может представлять собой прямоугольную последовательность или вид (прямоугольный импульс), пилообразную последовательность (пилообразный импульс), синусоидальную последовательность (синусоидальный импульс), трапецеидальную последовательность (трапецеидальный импульс) или какой-либо иной вид импульса. Здесь для ручных бытовых электрических приборов предпочтительно используются очень длительные временные паузы Toff (время выключенного состояния) в диапазоне 50 мс - 2 с, предпочтительно 100 мс - 1 с и, например, 500 мс, и это существенно отличается от обычного приведения в действие в режиме ШИМ, поскольку здесь электродвигатель может полностью остановиться. Кроме того, время включенного состояния (Ton) может отличаться от Toff, и при этом соответствующие временные интервалы (Ton, Toff) можно устанавливать управляющим элементом. По сравнению с приведением в действие, когда используется максимальная 100%-я мощность, в этом случае с конечным значением максимальной мощности/напряжения, например, 50-60%, полным механическим рабочим ходом управляющего элемента может перекрываться диапазон меньших частот вращения, и это приводит к лучшей регулируемости мощности/частоты вращения.
Соответственно, при использовании, например, прямоугольной кривой или прямоугольной формы значение привода периодически изменяется между первым значением привода и вторым значением привода.
Использование этого типа импульсной формы является предпочтительным для обработки некоторых подлежащих обработке продуктов. Таким образом, использование импульсной формы является предпочтительной, например, для твердых продуктов, таких как орехи, чтобы добиться результата равномерной обработки. Кривая с непостоянными импульсами, которые, как описано выше, могут быть, например, прямоугольными или пилообразными, приводит к значительному улучшению результата резания.
Теперь со ссылкой на фиг. 4 и 5 будут описаны возможные способы управления импульсными режимами. В первом варианте осуществления при выборе импульсного режима (возможно из ряда возможных импульсных режимов) электродвигатель можно включать и выключать, воздействуя на второй рабочий элемент. Поэтому второй рабочий элемент служит только для включения и выключения электродвигателя, при этом параметры импульсного режима, такие как амплитуда, частота и т.п. не зависят от рабочего хода второго управляющего элемента.
В другом примере частота и ширина импульса может управляться посредством рабочего хода второго управляющего элемента. Как можно увидеть из фиг. 4, при увеличении рабочего хода или его значения ширина импульсов соответственно уменьшается, или увеличивается частота импульсов. Таким образом, по мере увеличения скорости значение привода изменяется от первого значения до второго значения и наоборот.
Это позволяет пользователю устанавливать значение привода, такое как скорость дробления или измельчения, посредством второго управляющего элемента с помощью только одного управляющего элемента, одновременно сохраняя импульсный режим.
В другом примере, который показан на фиг. 5, второй управляющий элемент может использоваться для управления амплитудой. Фиг. 5 показывает, например, импульсный режим, в котором максимальное значение привода импульсного режима увеличивается при увеличении рабочего хода управляющего элемента или его значения. Однако данный способ управления не ограничивается этим, и амплитуду импульсов также можно изменять адаптацией верхнего и нижнего значения импульса.
Специалисту в данной области техники будет очевидно, что форма импульсных режимов не ограничивается изменением амплитуды, ширины или частоты импульсов, но в зависимости от второго сигнала управления возможны управление/регулирование рабочего цикла включения/выключения и любая комбинация вышеуказанных управляемых параметров.
Теперь со ссылками на фиг. 6 будет описан второй вариант осуществления настоящего изобретения. Ручной бытовой прибор с электрическим приводом по первому варианту осуществления во втором варианте осуществления прибора 600 содержит первый управляющий элемент 601, второй управляющий элемент 602, блок 603 управления и электродвигатель 604. Второй вариант осуществления по фиг.6 отличается от варианта осуществления по фиг.1 тем, что он также имеет измерительное устройство 605 для измерения частоты вращения электродвигателя.
Измерительное устройство 605 выполнено с возможностью измерения частоты вращения электродвигателя. Измерение частоты вращения электродвигателя включает в себя также измерение частоты вращения смежного вала, такого, который предназначен для подсоединения лезвий ручного блендера к электродвигателю. Сигнал измерительного устройства 605 вводится в блок 603 управления.
Посредством измеренной измерительным устройством частоты вращения может быть дополнительно улучшено приведение в действие электродвигателя или управление им.
Если, например, выполняется обработка вязких продуктов, таких как тесто, мед или густые супы, то начальный момент вращения электродвигателя является очень большим, так что для обеспечения пуска прибора должно быть установлено высокое напряжение. Однако затем требуемый момент вращения резко уменьшается, и это ведет к сильному повышению частоты вращения, если сохраняется рабочий ход второго управляющего элемента. В случае вязких продуктов пользователю почти невозможно соответствующим образом быстро адаптировать рабочий ход второго управляющего элемента, чтобы получить постоянную частоту вращения. Это является особенным недостатком, если для обработки продукта требуется низкая частота вращения, потому что резкое повышение частоты вращения приводит к тому, что превышается оптимальная частота вращения, и тем самым ухудшается результат обработки.
Эта проблема решается обеспечением измерительного устройства 605, поскольку при этом может иметь место регулирование (измеренной) реальной частоты вращения до требуемой (целевой частоты вращения).
Показанные на фигурах 2-5 значения привода, а также их минимальные и максимальные значения в этом варианте осуществления являются (целевыми) частотами вращения. Эти графики и соответствующие режимы привода соответственно отражают корреляцию между рабочим ходом второго управляющего элемента и целевой частотой вращения.
После определения требуемой целевой частоты вращения в виде значения привода через выбранный режим и рабочий ход второго управляющего элемента эта конкретная целевая частота вращения (значение привода) сравнивается с текущей реальной частотой вращения, которая выдается измерительным устройством. Блок управления производит соответствующее регулирование выдаваемого напряжения, чтобы подогнать реальную частоту вращения под целевую частоту вращения.
Соответственно, если реальная частота вращения слишком низка, то сигнал привода электродвигателя, подлежащий выдаче на электродвигатель, выбирается таким образом, что частота вращения электродвигателя увеличивается. Например, может быть определено, что подлежащее приложению на электродвигатель напряжение выше текущего приложенного напряжения, и электродвигатель может быть приведен в действие соответствующим образом, или к электродвигателю может быть приложено соответствующее напряжение.
Посредством этого контура управления выполняется постоянная проверка реальной частоты вращения относительно целевой частоты вращения, чтобы подогнать реальную частоту вращения под целевую частоту вращения.
Следовательно, при изменении частоты вращения в результате изменения нагрузки на лезвия ручного блендера, например, при размельчении измельчаемого продукта, предотвращается повышение частоты вращения, поскольку, посредством контура управления, осуществляются непрерывная проверка реальной частоты вращения и повторная корректировка сигнала привода электродвигателя, выдаваемого на электродвигатель.
Соответственно, при обеспечении измерительного устройства во втором варианте осуществления дополнительно улучшаются приведение в действие электродвигателя и его управление, и достигаемый результат обработки продукта, и также обеспечивается постоянная частота вращения электродвигателя при изменении нагрузки.
В настоящих вариантах осуществления блок управления был описан таким образом, что он определяет и выдает сигналы привода электродвигателя.
В связи с этим, выдача на электродвигатель сигнала привода электродвигателя также включает в себя выдачу соответствующего сигнала управления на находящиеся между ними дополнительные компоненты, такие как переключательное устройство, такое как двунаправленный тиристор, МОП-транзистор, БТИЗ (биполярный транзистор с изолированным затвором) или транзистор, который служит для выдачи на электродвигатель требуемой мощности или напряжения.
Таким образом, специалист в данной области техники знаком с широким диапазоном возможностей для формирования сигнала привода электродвигателя, такого как сигнал управления или также как напряжение, прилагаемое к электродвигателю.
Кроме того, для специалиста в данной области техники также очевидно, что сигнал управления второго приводящего в действие устройства может быть либо аналоговым, либо цифровым сигналом, который обрабатывается блоком управления.
Специалист в данной области техники знаком с различными типами вариантов осуществления второго приводящего в действие устройства, которое выдает аналоговый либо цифровой сигнал, соответствующий рабочему ходу управляющего элемента или положению вдоль рабочего хода, глубине нажатия кнопки, траектории смещения ползункового переключателя или усилию нажатия на управляющий элемент.
Блок управления может быть выполнен, например, в виде микроконтроллера.
Возможна также любая комбинация признаков, указанных в пунктах формулы изобретения.
Ручной бытовой прибор с электрическим приводом не ограничен вышеупомянутым ручным блендером, но может также включать, например, другие ручные кухонные приборы, такие как ручной миксер.
Из предыдущего описания для специалиста в данной области техники очевидно, что могут быть реализованы различные модификации и изменения этого ручного бытового прибора с электрическим приводом без отклонения от объема изобретения.
Более того, изобретение было описано со ссылкой на конкретные примеры, которые, однако служат только для того, чтобы способствовать лучшему пониманию изобретения и не предназначены для ограничения последнего. Кроме того, для специалиста в данной области техники сразу же очевидно, что для реализации настоящего изобретения может быть использовано множество различных комбинаций аппаратных средств, программного обеспечения и программно-аппаратных средств, в частности, чтобы реализовать функцию блока управления.
Коммерческая применимость
Ручной бытовой прибор с электрическим приводом, такой как ручной блендер, может использоваться для обработки пищевых продуктов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫТОВЫЕ УСТРОЙСТВА С РЕГУЛИРОВКОЙ МОЩНОСТИ | 2015 |
|
RU2678388C2 |
| Кухонный прибор для обработки пищевых продуктов и способ активирования электродвигателя кухонного прибора | 2020 |
|
RU2818119C2 |
| КОМБИНИРОВАННАЯ СОКОВЫЖИМАЛКА-БЛЕНДЕР | 2011 |
|
RU2558480C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2007 |
|
RU2419954C1 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2532790C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ВНЕШНОСТЬЮ | 2016 |
|
RU2718036C2 |
| ОБНАРУЖЕНИЕ ИНСТРУМЕНТА ДЛЯ КУХОННЫХ ПРИБОРОВ | 2016 |
|
RU2689044C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| ОЧИСТИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2006 |
|
RU2333717C1 |
| СПОСОБ МОНИТОРИНГА КОНТРОЛЛЕРА ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2520162C2 |
Изобретение относится к ручному бытовому электрическому прибору. Технический результат заключается в создании ручного бытового прибора с более точной активизацией электродвигателя. С одной стороны, это облегчает пользование прибором, а с другой стороны, приводит к улучшенному результату обработки продуктов. Технический результат достигается тем, что при управлении ручным бытовым прибором получают первый сигнал управления от первого управляющего элемента, чтобы выбрать режим управления электродвигателем, затем получают второй сигнал управления от второго управляющего элемента, выбирают режим активизации электродвигателя из предусмотренных режимов активизации электродвигателя на основе первого сигнала управления и определяют сигнал активизации электродвигателя, подлежащий выдаче на электродвигатель, на основании выбранного режима активизации электродвигателя и второго сигнала управления. 11 з.п. ф-лы, 8 ил.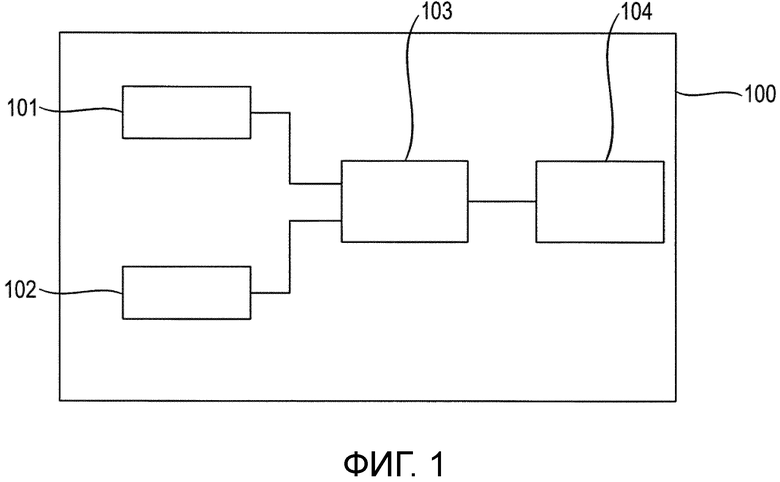
1. Ручной бытовой прибор (100, 600) с электрическим приводом, содержащий:
электродвигатель (104, 604) для приведения в действие бытового прибора;
блок (103, 603) управления для управления электродвигателем;
первый управляющий элемент (101, 601) для выдачи на блок управления первого сигнала управления, чтобы выбрать режим управления электродвигателем; и
второй управляющий элемент (102, 602) для выдачи на блок управления второго сигнала управления,
причем блок (103, 603) управления выполнен с возможностью выбора режима привода электродвигателя из предусмотренных режимов привода электродвигателя, характеризующих различные профили привода, на основании первого сигнала управления, и
блок (103, 603) управления выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель, на основании выбранного режима привода электродвигателя и второго сигнала управления,
при этом второй сигнал управления, выдаваемый вторым управляющим элементом (102, 602), зависит от рабочего хода второго управляющего элемента,
при этом предусмотренные режимы привода электродвигателя включают в себя по меньшей мере один из:
- первого режима привода электродвигателя с первым максимальным значением привода для приведения в действие электродвигателя, причем блок (103, 603) управления выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель (104, 604), на основании второго сигнала управления и первого максимального значения привода;
- второго режима привода электродвигателя со вторым максимальным значением привода для приведения в действие электродвигателя, отличным от первого максимального значения привода, причем блок (103, 603) управления выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель (104, 604), на основании второго сигнала управления и второго максимального значения привода;
- первого импульсного режима с первой формой импульсов сигнала привода для приведения в действие электродвигателя (104, 604), причем блок (103, 603) управления выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель, на основании второго сигнала управления и первой формы импульсов.
2. Ручной бытовой прибор (100, 600) с электрическим приводом по п. 1, при этом
максимальное значение привода является максимальным прилагаемым напряжением, максимальным моментом вращения или максимальной частотой вращения электродвигателя (104, 604).
3. Ручной бытовой прибор (100, 600) с электрическим приводом по п. 1 или 2, при этом
блок (103, 603) управления выполнен с возможностью в импульсном режиме,
- управления шириной импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602);
- переключения между выключенным состоянием и приводом с формой импульсов в соответствии с приведением в действие второго управляющего элемента (102, 602);
- управления амплитудой импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602);
- управления частотой следования импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602);
- управления коэффициентом заполнения, включением/выключением, формой импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602); или
- управления их комбинацией в соответствии с упомянутым рабочим ходом.
4. Ручной бытовой прибор (100, 600) с электрическим приводом по любому из пп. 1-3, при этом
форма импульсов импульсного режима является одной из:
- пилообразного импульса;
- синусоидального импульса;
- прямоугольного импульса;
- трапецеидального импульса;
- импульса любой формы.
5. Ручной бытовой прибор (100, 600) с электрическим приводом по любому из пп. 1-4, при этом
в первом и во втором режимах привода электродвигателя зависимость между вторым сигналом управления и значением привода между минимальным значением и первым или вторым максимальным значением является одной из:
- линейной зависимости;
- экспоненциальной зависимости;
- ступенчатой зависимости;
- любой криволинейной зависимости.
6. Ручной бытовой прибор (100, 600) с электрическим приводом по любому из предшествующих пунктов, дополнительно содержащий:
измерительное устройство (605) для измерения частоты вращения электродвигателя (604), причем блок управления (603) выполнен с возможностью определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель (604), также на основании измеренной частоты вращения электродвигателя.
7. Способ управления ручным бытовым прибором (100, 600) с электрическим приводом, включающий этапы:
получения первого сигнала управления от первого управляющего элемента (101, 601), чтобы выбрать режим управления электродвигателем;
получения второго сигнала управления от второго управляющего элемента (102, 602);
выбора режима привода электродвигателя из предусмотренных режимов привода электродвигателя, характеризующих различные профили привода, на основе первого сигнала управления; и
определения сигнала привода электродвигателя, подлежащего выдаче на электродвигатель (104, 604), на основании выбранного режима привода электродвигателя и второго сигнала управления,
при этом принятый второй сигнал управления второго управляющего элемента (102, 602) зависит от рабочего хода второго управляющего элемента,
при этом предусмотренные режимы привода электродвигателя включают по меньшей мере один из:
- первого режима привода электродвигателя с первым максимальным значением привода для приведения в действие электродвигателя (104, 604), причем сигнал привода электродвигателя, подлежащий выдаче на электродвигатель, определяют на основании второго сигнала управления и первого максимального значения на этапе определения;
- второго режима привода электродвигателя со вторым максимальным значением привода, отличным от первого максимального значения привода, для приведения в действие электродвигателя (104, 604), причем сигнал привода электродвигателя, подлежащий выдаче на электродвигатель, определяют на основании второго сигнала управления и второго максимального значения на этапе определения;
- первого импульсного режима с первой формой импульсов сигнала привода для приведения в действие электродвигателя (104), причем сигнал привода электродвигателя, подлежащий выдаче на электродвигатель, определяют на основании второго сигнала управления и первой формы импульсов на этапе определения.
8. Способ по п. 7,
при этом максимальное значение привода является максимальным прилагаемым напряжением, максимальной частотой вращения или максимальным моментом вращения электродвигателя (104, 604).
9. Способ по п. 7 или 8, при этом в импульсном режиме
- управляют шириной импульсов в зависимости от рабочего хода второго управляющего элемента (102);
- осуществляют переключение между выключенным состоянием и приводом с формой импульсов в соответствии с приведением в действие второго управляющего элемента (102, 602);
- управляют амплитудой импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602);
- управляют частотой следования импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602);
- управляют коэффициентом заполнения, включением/выключением, формой импульсов в зависимости от рабочего хода второго управляющего элемента (102, 602); или
- управляют их комбинацией в соответствии с упомянутым рабочим ходом.
10. Способ по любому из пп. 7-9,
при этом форма импульсов импульсного режима является одной из:
- пилообразного импульса;
- синусоидального импульса;
- прямоугольного импульса;
- трапецеидального импульса;
- импульса любой формы.
11. Способ по любому из пп. 7-10, при этом
в первом и во втором режимах привода электродвигателя зависимость между вторым сигналом управления и кривой между минимальным значением и первым или вторым максимальным значением является одной из:
- линейной зависимости;
- экспоненциальной зависимости;
- ступенчатой зависимости;
- любой криволинейной зависимости.
12. Способ по любому из пп. 7-11, дополнительно включающий этап:
измерения посредством измерительного устройства (605) частоты вращения электродвигателя (604),
причем на этапе определения сигнал привода электродвигателя, подлежащий выдаче на электродвигатель, также определяют на основании измеренной частоты вращения электродвигателя.
| КУХОННЫЙ ПРИБОР С УСТРОЙСТВОМ ОТОБРАЖЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ | 2009 |
|
RU2492791C2 |
| WO 2015078853 А1, 2015.06.04 | |||
| DE 19742916 A1, 1999.04.01 | |||
| DE 102008040935, 2010.02.04 | |||
| US 5347205 A, 1994.09.13 | |||
| DE 29719596 U1, 1998.01.15 | |||
| US 2014226436 A1, 2014.08.14 | |||
| Установка для сушки крупногабаритных изделий | 1978 |
|
SU723333A1 |

