ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству управления электродвигателем, которое используется для управления электродвигателем переменного тока для приведения в движение железнодорожного вагона с электроприводом, и в частности, управления синхронным электродвигателем с постоянными магнитами.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В последние годы в областях, в которых применяются электродвигатели переменного тока, таких как области промышленных машин, бытовых электроприборов, автомобилей и т.п., примеры, в которых синхронный электродвигатель с постоянными магнитами приводится в действие и управляется инвертором, становятся все чаще, заменяя традиционные способы, в которых асинхронный электродвигатель приводится в действие и управляется инвертором.
Синхронные электродвигатели с постоянными магнитами известны как обладающие более высоким КПД, чем асинхронные электродвигатели, например, по следующим причинам: синхронные электродвигатели с постоянными магнитами не нуждаются в токах возбуждения из-за того, что магнитный поток устанавливается постоянным магнитом; в синхронных электродвигателях с постоянными магнитами не возникают вторичные потери в меди, так как в роторе не протекает электрический ток; синхронные электродвигатели с постоянными магнитами способны эффективно получать крутящий момент, в дополнение к крутящему моменту, сформированному магнитным потоком, установленным постоянным магнитом, используя реактивный момент, который использует разницу между магнитными сопротивлениями в роторе. В последние годы также рассматривалось применение синхронных электродвигателей с постоянными магнитами в устройствах преобразования электроэнергии, используемых для приведения в движение железнодорожных вагонов с электроприводом.
Патентный документ 1: Японская выложенная патентная заявка № H7-227085
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Одной из задач, которые должны быть достигнуты при конфигурировании устройства управления электродвигателем, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами, является устранение проблемы изменений в уровне напряжения между клеммами электродвигателя, которое возникает во время попытки оптимально управлять синхронным электродвигателем с постоянными магнитами. Чтобы оптимально управлять синхронным электродвигателем с постоянными магнитами, например, может использоваться способ управления с максимальным крутящим моментом/током, посредством которого генерируется максимальный крутящий момент относительно определенного уровня электрического тока, или способ управления с максимальным КПД, посредством которого КПД электродвигателя поддерживается на максимальном уровне. Эти способы, используемые для оптимального управления синхронным электродвигателем постоянного тока, являются способами управления, посредством которых амплитуда и фаза электрического тока, прикладываемого к электродвигателю, регулируются таким образом, чтобы иметь оптимальные значения, которые сохраняются в расчетных формулах или сохраняются в таблице заранее. Так как детали этих способов управления раскрываются в различных документах, подробное их пояснение будет опущено. Когда используется любой из этих оптимальных способов управления, описанных выше, так как составляющая тока по крутящему моменту (т.е. ток q-оси и составляющая тока по магнитному потоку (т.е. ток d-оси) обе регулируются таким образом, что эти токи, каждый, имеют оптимальное значение согласно скорости вращения и уровню выходного крутящего момента электродвигателя, то оптимальный потокосцепление электродвигателя изменяется согласно скорости вращения и уровню выходного крутящего момента электродвигателя. В результате, напряжение между клеммами электродвигателя (т.е. выходное напряжение инвертора) значительно изменяется.
В противоположность, в обычной практике устройство управления электродвигателем, которое приводит в действие и управляет традиционным асинхронным электродвигателем, выполняет работу при постоянном крутящем моменте, одновременно поддерживая вторичный магнитный поток электродвигателя на постоянном уровне до тех пор, пока скорость вращения не достигнет базовой скорости после того, как электродвигатель запущен. После того, как скорость вращения становится равной или большей, чем базовая скорость, устройство управления электродвигателем выполняет работу при постоянной электрической мощности, уменьшая вторичный магнитный поток, по существу, в обратной пропорции к увеличению выходной частоты инвертора, в то же время фиксируя выходное напряжение инвертора в максимальном значении. В результате, пока скорость вращения равна или выше, чем базовая скорость, инвертор работает в так называемом одноимпульсном режиме, в котором получается максимальное выходное напряжение. Тот же принцип применяется при использовании электродвигателей в качестве источников энергии для устройств, отличных от железнодорожных вагонов с электроприводом, таких как электромобили, или при использовании электродвигателей в широких отраслях промышленности. Другими словами, в диапазоне работы при постоянной электрической мощности вторичный магнитный поток конфигурируется только так, чтобы изменяться в обратной пропорции к выходной частоте инвертора, но не конфигурируется так, чтобы изменяться согласно уровню выходного крутящего момента. Хотя возможно регулировать вторичный магнитный поток согласно выходному крутящему моменту, этот способ обычно не используется, поскольку, как пояснено ниже, переходные характеристики выходного крутящего момента ухудшаются.
Согласно принципу работы асинхронных электродвигателей вторичный магнитный поток генерируется в асинхронном электродвигателе индуцированием электрического тока на стороне ротора, в то время как электрический ток на стороне статора (т.е. первичный электрический ток) и частота скольжения, которые управляются извне асинхронного электродвигателя, управляются так, чтобы быть на требуемых уровнях. Эта конфигурация сильно отличается от конфигурации синхронных электродвигателей с постоянными магнитами, где постоянный магнит вставлен в ротор так, что магнитный поток устанавливается им. В асинхронных электродвигателях соотношение между первичным электрическим током и вторичным магнитным потоком является соотношением задержки первого порядка, имеющим постоянную времени второго порядка, которая определяется из вторичного сопротивления и вторичной индуктивности. Таким образом, даже если первичный электрический ток изменяется так, что вторичный магнитный поток конфигурируется таким образом, чтобы изменяться согласно уровню выдаваемого крутящего момента, это занимает период времени (вообще говоря, приблизительно 500 миллисекунд в примерах асинхронных электродвигателей, используемых для железнодорожных вагонов с электроприводом), соответствующий постоянной времени второго порядка, прежде, чем вторичный магнитный поток станет стабильным при требуемом значении. В течение этого периода времени выдаваемый крутящий момент нестабилен. В результате, крутящий момент завышается или проявляет склонность к колебанию, а переходные характеристики крутящего момента, таким образом, ухудшаются. По этим причинам способ, посредством которого вторичный магнитный поток регулируется согласно выдаваемому крутящему моменту, обычно не используется в асинхронных электродвигателях.
В устройстве управления электродвигателем, которое приводит в действие и управляет традиционным асинхронным электродвигателем, поскольку соотношение между скоростью вращения электродвигателя и значением вторичного магнитного потока электродвигателя определяется способом соответствия один к одному, соотношение между скоростью вращения электродвигателя и уровнем выходного напряжения инвертора также определяется способом соотношения один к одному. Также, когда скорость равна или выше базовой скорости, вторичный магнитный поток уменьшается таким образом, что инвертор выводит максимальное напряжение. Таким образом, выходное напряжение инвертора фиксируется в максимальном значении, несмотря на уровень выдаваемого крутящего момента (например, см. патентный документ 1).
Однако в устройстве управления электродвигателем, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами, соотношение между скоростью вращения электродвигателя и уровнем выходного напряжения инвертора изменяется согласно выходному крутящему моменту. Таким образом, когда конфигурируется устройство управления электродвигателем, необходимо обратить внимание на эту характеристику.
В качестве другой проблемы, отличной от обсужденных выше, может рассматриваться соотношение между частотой переключения переключающего элемента, включенного в инвертор, используемый для приведения в действие электродвигателя, и числом полюсов в электродвигателе. Вообще говоря, напряжение источника питания постоянного тока, используемого в качестве входного для инвертора для железнодорожного вагона с электроприводом, приблизительно равно 1500-3000 В и является очень высоким. Таким образом, необходимо использовать высоковольтный переключающий элемент, который работает под напряжением 3300-6500 В. Однако такой высоковольтный переключающий элемент имеет большие потери при переключении и большие потери на электропроводность. В результате, принимая во внимание неиспользование избыточных охлаждающих средств (например, охлаждающих устройств, охлаждающих вентиляторов) для переключающего элемента, приемлемый уровень частоты переключения равен приблизительно 1000 Гц максимум. Например, этот уровень частоты переключения является настолько низким, как одна десятая - одна двадцатая частоты переключения для бытового электроприбора, инвертора промышленного применения или электромобиля.
Что касается числа полюсов в синхронном электродвигателе с постоянными магнитами, приводимом в действие инвертором, шесть полюсов или восемь полюсов подходят с точки зрения создания компактного и легковесного электродвигателя. Так как большинство традиционных асинхронных электродвигателей включают в себя четыре полюса, число полюсов в синхронном электродвигателе с постоянными магнитами в 1,5-2 раза больше, чем число полюсов в традиционном асинхронном электродвигателе.
Когда число полюсов в электродвигателе увеличивается, выходная частота инвертора, соответствующая той же скорости железнодорожного вагона с электроприводом, увеличивается пропорционально увеличению числа полюсов. В случае, когда традиционный четырехполюсный асинхронный электродвигатель заменен, например, восьмиполюсным синхронным электродвигателем с постоянными магнитами, максимальное значение выходной частоты инвертора применительно к широко используемому железнодорожному вагону с электроприводом (т.е. выходная частота инвертора при предполагаемой максимальной скорости железнодорожного вагона с электроприводом) равно приблизительно 300 Гц, что является удвоением максимального уровня, когда используется традиционный асинхронный электродвигатель (т.е. 150 Гц). Однако, как пояснено выше, приемлемый уровень максимального значения частоты переключения приблизительно равен 1000 Гц, и невозможно увеличивать частоту переключения до уровня выше, чем этот. Таким образом, например, чтобы регулировать уровень выходного напряжения инвертора (т.е. так, чтобы это было значение, отличное от максимального напряжения) в случае, когда выходная частота инвертора равна приблизительно 300 Гц, что является максимальным значением, так как частота переключения равна приблизительно 1000 Гц самое большее, при этом число импульсов, включенных в полупериод выходного напряжения инвертора, равно приблизительно 3, что является результатом, полученным делением несущей частоты (т.е. частоты переключения) на выходную частоту инвертора, и чрезвычайно мало. Когда электродвигатель приводится в действие в таком состоянии, будут ситуации, в которых несущая частота не делится на выходную частоту инвертора. В таких ситуациях число импульсов и позиции импульсов, которые включены в положительный полупериод и в отрицательный полупериод выходного напряжения инвертора, неуравновешены. В результате, положительная/отрицательная симметричность напряжения, прикладываемого к электродвигателю, теряется, и шум и/или вибрации вызываются колебаниями тока и/или пульсациями крутящего момента, происходящими в электродвигателе.
Устройство управления электродвигателем, которое приводит в действие и управляет традиционным асинхронным электродвигателем, работает, как пояснено выше, в одноимпульсном режиме, в котором, пока скорость вращения равна или выше, чем базовая скорость вращения, выходное напряжение инвертора постоянно зафиксировано в максимальном значении, несмотря на уровень выходного крутящего момента. В результате, нет необходимости регулировать уровень выходного напряжения инвертора, а также число импульсов, включенных в полупериод выходного напряжения инвертора, всегда равно 1 и постоянно без какого-либо временного изменения. Следовательно, число импульсов и позиции импульсов равны между положительным полупериодом и отрицательным полупериодом выходного напряжения инвертора. Таким образом, возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю. Следовательно, нет необходимости беспокоиться о колебаниях тока или пульсациях крутящего момента, происходящих в электродвигателе.
Другими словами, устройство управления электродвигателем для железнодорожного вагона с электроприводом, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами, нуждается в осуществлении управления при уделении достаточного внимания положительной/отрицательной симметричности напряжения, приложенного к электродвигателю, особенно в диапазоне, где выходная частота инвертора является высокой.
Резюмируя, устройство управления электродвигателем для железнодорожного вагона с электроприводом, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами, нуждается в осуществлении управления, при уделении достаточного внимания изменениям в уровне напряжения между клеммами электродвигателя на основе выходного крутящего момента и скорости вращения электродвигателя и положительной/отрицательной симметричности напряжения, приложенного к электродвигателю.
В виду обстоятельств, описанных выше, задачей настоящего изобретения является предоставление устройства управления электродвигателем, приводящего в действие и управляющего, в частности, синхронным электродвигателем с постоянными магнитами, которое способно осуществлять управление при уделении достаточного внимания изменениям в уровне выходного напряжения инвертора на основе выдаваемого крутящего момента и скорости вращения электродвигателя и положительной/отрицательной симметричности напряжения, приложенного к электродвигателю, при этом устройство способно не допускать ситуаций, при которых в электродвигателе возникают колебания тока и пульсации крутящего момента, следовательно, устройство способно не допускать ситуаций, при которых шум и вибрации вызываются такими колебаниями тока и пульсациями крутящего момента, и также устройство способно приводить в действие и управлять электродвигателем устойчивым образом.
Для решения поставленной задачи устройство управления электродвигателем, предназначенное для управления электродвигателем переменного тока посредством вывода сигнала широтно-импульсной модуляции переключающему элементу, включенному в инвертор, который подключен к источнику электропитания постоянного тока и выполнен с возможностью выдачи переменного тока, имеющего произвольную частоту и произвольное напряжение, электродвигателю переменного тока, указанное устройство управления электродвигателем содержит блок управления импульсным режимом, который выполнен с возможностью выборочного переключения среди множества импульсных режимов, каждый из которых может служить в качестве образца вывода сигнала широтно-импульсной модуляции, и каждый из которых включает в себя синхронный импульсный режим, асинхронный импульсный режим и одноимпульсный режим. Дополнительно, блок управления импульсным режимом переключает между синхронным импульсным режимом и асинхронным импульсным режимом на основе множества количественных параметров, каждый из которых связан с выходным состоянием инвертора и каждый из которых делает возможным ссылаться на число, указывающее как много импульсов включено в период основной синусоиды выходного напряжения инвертора.
Согласно аспекту настоящего изобретения во время процесса переключения, выполняемого устройством управления электродвигателем, чтобы переключаться между синхронным импульсным режимом и асинхронным импульсным режимом, импульсный режим переключается на основе множества количественных параметров, каждый из которых связан с выходным состоянием инвертора, причем множество количественных параметров включает в себя количественный параметр, который делает возможным ссылаться на число импульсов, включенных в период основной синусоиды выходного напряжения инвертора. В такой компоновке в случае, когда уровень выходного напряжения инвертора изменяется согласно выходному крутящему моменту и скорости вращения электродвигателя, так же как, например, в синхронном электродвигателе с постоянными магнитами, возможно сохранять положительную/отрицательную симметричность напряжения, давая возможность выбирать синхронный импульсный режим даже в ситуации, когда согласно традиционному способу управления невозможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю, так как выбран асинхронный импульсный режим. В результате, достигаются полезные эффекты, когда возможно не допускать ситуаций, в которых колебания тока и пульсации крутящего момента возникают в электродвигателе, чтобы, следовательно, не допускать ситуаций, в которых шум и вибрации вызываются такими колебаниями тока и пульсациями крутящего момента, и возможно приводить в действие и управлять электродвигателем устойчивым образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает схему примера устройства управления электродвигателем согласно первому варианту осуществления настоящего изобретения;
фиг.2 изображает схему примера блока формирования командного сигнала напряжения/широтно-импульсной модуляции (PWM) согласно первому варианту осуществления;
фиг.3 изображает схему для пояснения работы, которая выполняется в ситуации, когда традиционный способ переключения импульсного режима применяется к устройству управления электродвигателем, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами;
фиг.4 изображает схему для пояснения операции переключения импульсного режима согласно первому варианту осуществления;
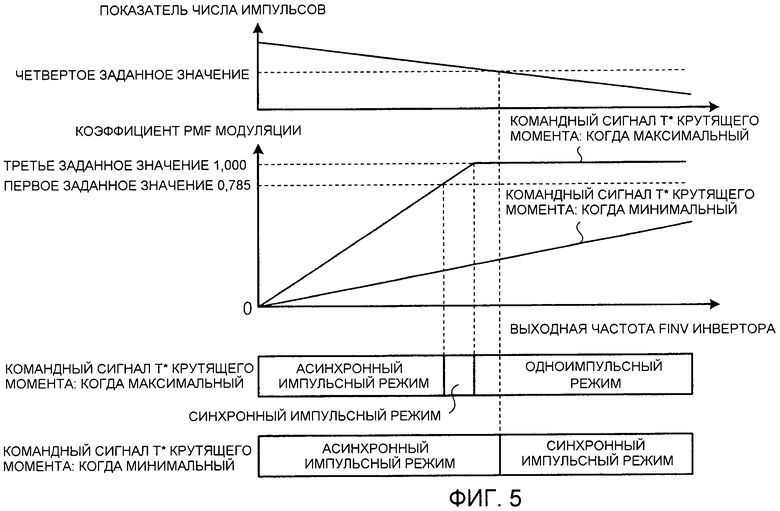
фиг.5 изображает схему для пояснения операции переключения импульсного режима согласно второму варианту осуществления настоящего изобретения;
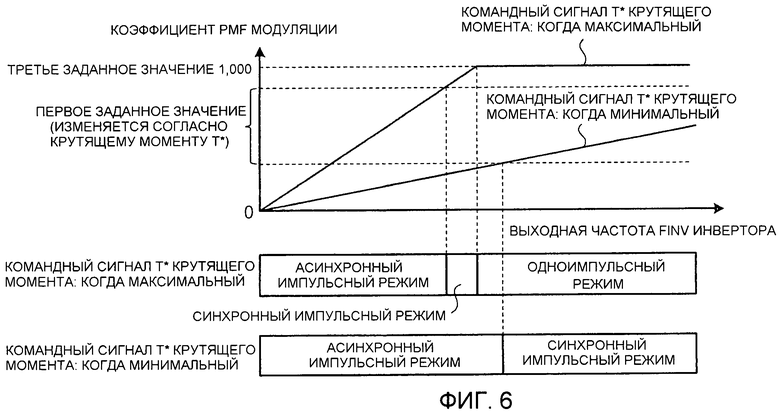
фиг.6 изображает схему для пояснения операции переключения импульсного режима согласно третьему варианту осуществления настоящего изобретения;
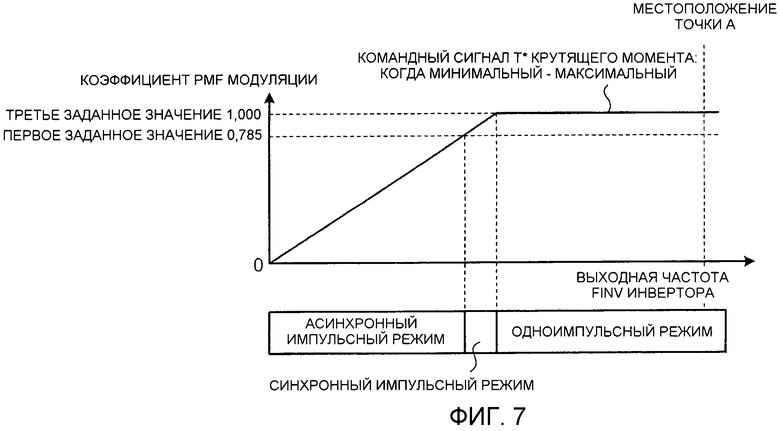
фиг.7 изображает схему для пояснения операции переключения импульсного режима согласно традиционному способу.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В последующих разделах примерные варианты осуществления устройства управления электродвигателем согласно настоящему изобретению будут описаны подробно со ссылкой на сопровождающие чертежи. Настоящее изобретение не ограничено примерными вариантами осуществления.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
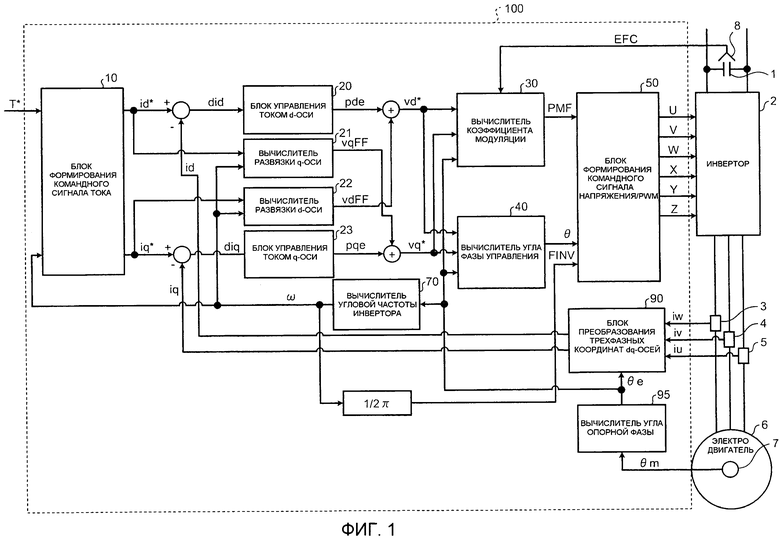
Фиг.1 - это схема примера устройства управления электродвигателем согласно первому варианту осуществления настоящего изобретения. Как показано на фиг.1, основная схема сконфигурирована так, чтобы включать в себя: конденсатор 1, служащий в качестве источника питания постоянного тока; инвертор 2, который преобразует напряжение постоянного тока от конденсатора 1 в напряжение переменного тока, имеющее произвольную частоту и произвольное напряжение, и выводит трехфазный переменный ток; синхронный электродвигатель 6 с постоянными магнитами (далее в данном документе просто называемый "электродвигателем").
В основной схеме предусмотрены датчик 8 напряжения, который детектирует напряжение конденсатора 1 и датчики 3, 4 и 5 тока, которые соответственно детектируют электрические токи iu, iv и iw, протекающие в выходных линиях от инвертора 2. Электродвигатель 6 снабжен датчиком 7 положения, который детектирует механический угол θm ротора. Сигналы детектирования от датчика 8 напряжения, датчиков 3, 4 и 5 тока и датчика 7 положения вводятся в устройство 100 управления электродвигателем.
Можно использовать кодирующее устройство вместо датчика 7 положения. Также вместо сигнала положения, полученного от датчика 7 положения, можно использовать способ без датчика положения, посредством которого сигнал положения получается из вычисления на основе детектированного напряжения, детектированных токов и т.п. В этой ситуации нет необходимости использовать датчик 7 положения. Другими словами, сигнал положения необязательно должен быть получен с помощью датчика 7 положения. Кроме того, относительно датчиков 3, 4 и 5 тока, когда датчики тока предусмотрены, по меньшей мере, для двух фаз, возможно получать ток для другой фазы посредством вычисления. Таким образом, схема может быть выполнена этим способом. Возможна еще одна компоновка, в которой электрические токи получаются посредством восстановления выходного тока инвертора 2 на основе тока инвертора 2 со стороны постоянного тока.
Стробирующие сигналы U, V, W, X, Y и Z, которые были сформированы устройством 100 управления электродвигателем, вводятся в инвертор 2. Переключающий элемент, который предусмотрен в инверторе 2, управляется посредством процесса управления с широтно-импульсной модуляцией (PWM). PWM-инвертор источника напряжения подходит для использования в качестве инвертора 2. Так как его конфигурации широко известны, подробное их пояснение будет опущено.
Устройство 100 управления электродвигателем сконфигурировано таким образом, что командный сигнал T* крутящего момента вводится в него из внешнего устройства управления (не показано). Устройство 100 управления электродвигателем сконфигурировано таким образом, чтобы управлять инвертором 2 таким способом, что крутящий момент T, сгенерированный электродвигателем 6, равен командному сигналу T* крутящего момента.
Далее будет пояснена конфигурация устройства 100 управления электродвигателем. Устройство 100 управления электродвигателем сконфигурировано таким образом, чтобы включать в себя: вычислитель 95 угла опорной фазы, который вычисляет угол θe опорной фазы на основе механического угла θm ротора; блок 90 преобразования трехфазных координат dq-осей, который формирует ток id d-оси и ток iq q-оси на основе трехфазных токов iu, iv и iw, которые соответственно были детектированы датчиками 3, 4 и 5 тока, и угла θe опорной фазы; вычислитель 70 угловой частоты инвертора, который вычисляет выходную угловую частоту ω инвертора на основе угла θe опорной фазы; блок 10 формирования командного сигнала тока, который формирует командный сигнал id* тока d-оси и командный сигнал iq* тока q-оси на основе командного сигнала T* крутящего момента, который был подан от внешнего источника, и выходной угловой частоты ω инвертора; блок 20 управления током d-оси, который формирует ошибку pde тока d-оси, выполняя пропорционально-интегральный процесс регулирования по разности между командным сигналом id* тока d-оси и током d-оси; блок 23 управления током q-оси, который формирует ошибку pqe тока q-оси, выполняя пропорционально-интегральный процесс регулирования по разности между командным сигналом iq* тока q-оси и током q-оси; вычислитель 21 разделения q-оси, который вычисляет напряжение vqFF q-оси прямой связи на основе командного сигнала id* тока d-оси и выходной угловой частоты ω инвертора; вычислитель 22 разделения d-оси, который вычисляет напряжение vdFF d-оси прямой связи на основе командного сигнала iq* тока q-оси и выходной угловой частоты ω инвертора; вычислитель 30 коэффициента модуляции, который вычисляет коэффициент PMF модуляции на основе командного сигнала vd* напряжения d-оси, который является суммой ошибки pde тока d-оси и напряжения vdFF d-оси прямой связи, а также командного сигнала vq* напряжения q-оси, который является суммой ошибки pqe тока q-оси и напряжения vqFF q-оси прямой связи, угла θe опорной фазы и напряжения EFC конденсатора 1; вычислитель 40 угла фазы управления, который вычисляет угол θ фазы управления на основе командного сигнала vd* напряжения d-оси, который является суммой ошибки pde тока d-оси и напряжения vdFF d-оси прямой связи, а также командного сигнала vq* напряжения q-оси, который является суммой ошибки pqe тока q-оси и напряжения vqFF q-оси прямой связи, и угла θe опорной фазы; и блок 50 формирования командного сигнала напряжения/PWM, который формирует стробирующие сигналы U, V, W, X, Y и Z, которые должны предоставляться инвертору 2, на основе коэффициента PMF модуляции и угла θ фазы управления.
Далее будут пояснены подробные конфигурации и операции управляющих блоков, описанных выше. Сначала вычислитель 95 угла опорной фазы вычисляет угол θe опорной фазы, который является электрическим углом, на основе механического угла θm ротора согласно формуле (1)

В формуле (1) PP представляет число пар полюсов в электродвигателе 6.
Блок 90 преобразования трехфазных координат dq-осей формирует ток id d-оси и ток iq q-оси на основе трехфазных токов iu, iv и iw и угла θe опорной фазы с помощью формулы (2), показанной ниже
Вычислитель 70 угловой частоты инвертора вычисляет выходную угловую частоту ω инвертора посредством дифференцирования угла θe опорной фазы согласно формуле (3)

Также вычислитель 70 угловой частоты инвертора вычисляет выходную частоту FINV инвертора посредством деления выходной угловой частоты ω инвертора на 2π.
Далее будут пояснены конфигурация и работа блока 10 формирования командного сигнала тока. Блок 10 формирования командного сигнала тока формирует командный сигнал id* тока d-оси и командный сигнал iq* тока q-оси на основе командного сигнала T* крутящего момента, который был введен из внешнего источника, и выходной угловой частоты ω инвертора. Способ формирования может быть, например, оптимальным способом управления, таким, как способ управления максимальным крутящим моментом/током, посредством которого формируется максимальный крутящий момент относительно определенного уровня электрического тока, или способ управления максимальным КПД, посредством которого КПД электродвигателя поддерживается на максимальном уровне. Согласно этим примерам оптимального способа управления фактический ток регулируется так, чтобы быть равным оптимальным значениям командного сигнала токовой составляющей крутящего момента (т.е. командного сигнала iq* тока q-оси) и командного сигнала токовой составляющей магнитного потока (т.е. командного сигнала id* тока d-оси), которые сохранены в формуле вычисления или сохранены в таблице заранее, в то время как скорость вращения и уровень выходного крутящего момента электродвигателя, например, используются в качестве параметров. Так как детали оптимальных способов управления широко известны и раскрыты в различных документах, подробное их пояснение будет опущено.
Блок 20 управления током d-оси и блок 23 управления током q-оси соответственно формируют ошибку pde тока d-оси, выполняя пропорционально-интегральное усиление по разности между командным сигналом id* тока d-оси и током d-оси, и ошибку pqe тока q-оси, выполняя пропорционально-интегральное усиление по разности между командным сигналом iq* тока q-оси и током q-оси, согласно формулам (4) и (5)

В формулах (4) и (5) K1 и K3, каждый, представляют пропорциональный коэффициент усиления, тогда как K2 и K4, каждый, представляют интегральный коэффициент усиления, в то время как s представляет оператор дифференцирования. В качестве дополнительной информации значения pqe и pde могут быть установлены нулевыми, при необходимости, так что pqe и pde не используются в процессе управления, особенно во время одноимпульсного режима работы или т.п.
Дополнительно, вычислитель 22 развязки d-оси и вычислитель 21 развязки q-оси соответственно вычисляют напряжение vdFF d-оси прямой связи и напряжение vqFF q-оси прямой связи согласно формулам (6) и (7)

В формулах (6) и (7) R1 представляет сопротивление (Ом) первичной обмотки электродвигателя 6, тогда как Ld представляет индуктивность d-оси (Гн), в то время как Lq представляет индуктивность q-оси (Гн), и φa представляет магнитный поток (Вб) постоянного магнита.
Дополнительно, вычислитель 30 коэффициента модуляции вычисляет коэффициент PMF модуляции на основе командного сигнала vd* напряжения d-оси, который является суммой ошибки pde тока d-оси и напряжения vdFF d-оси прямой связи, а также командного сигнала vq* напряжения q-оси, который является суммой ошибки pqe тока q-оси и напряжения vqFF q-оси прямой связи, угла θe опорной фазы и напряжения EFC конденсатора 1 согласно формуле (8)

Для формулы (8) удовлетворяются условия согласно формулам (9) и (10)

Коэффициент PMF модуляции получается посредством выражения отношения величины VM* вектора командного сигнала выходного напряжения инвертора к максимальному напряжению VMmax (определенному с помощью формулы (9)), что может быть выведена инвертором. Указывается, что в случае, где PMF=1,0 удовлетворяется, величина VM* вектора командного сигнала выходного напряжения инвертора равна максимальному напряжению VMmax, которое имеет возможность выводиться инвертором. Также, как понятно из формул (2)-(10), коэффициент PMF модуляции изменяется согласно командному сигналу id* тока d-оси и командному сигналу iq* тока q-оси, которые формируются блоком 10 формирования командного сигнала тока.
Вычислитель 40 угла управления фазы вычисляет угол θ управления фазы на основе командного сигнала vd* напряжения d-оси, который является суммой ошибки pde тока d-оси и напряжения vdFF d-оси прямой связи, а также командного сигнала vq* напряжения q-оси, который является суммой ошибки pqe тока q-оси и напряжения vqFF q-оси прямой связи, и угла θe опорной фазы согласно формуле (11)

В отношении формулы (11) удовлетворяется условие согласно формуле (12):

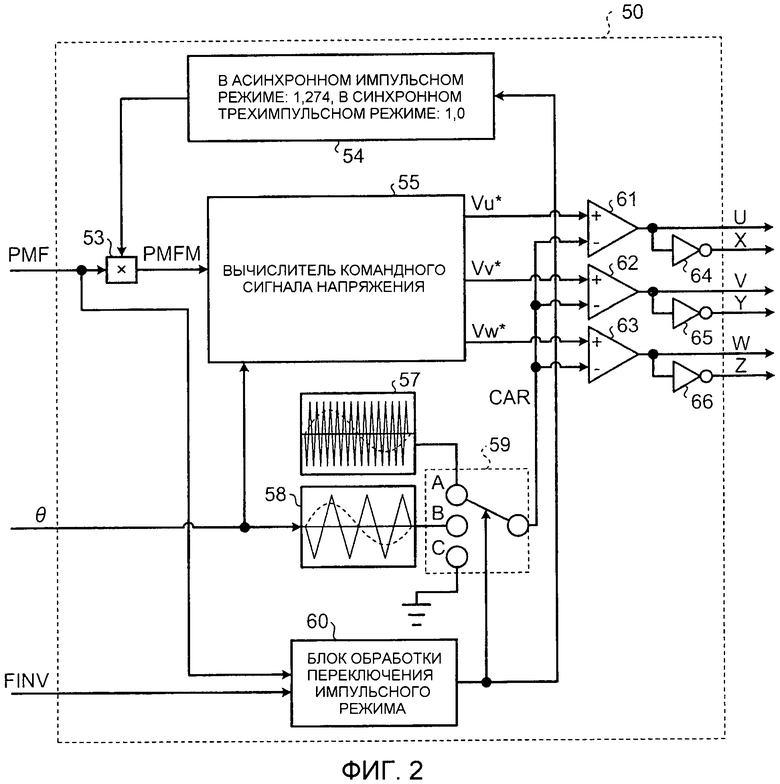
Далее будет пояснена конфигурация блока 50 формирования командного сигнала напряжения/PWM. Фиг.2 - это схема примера блока 50 формирования командного сигнала напряжения/PWM согласно первому варианту осуществления. Как показано на фиг.2, блок 50 формирования командного сигнала напряжения/PWM сконфигурирован таким образом, чтобы включать в себя: умножитель 53, таблицу 54 регулируемого коэффициента усиления, вычислитель 55 командного сигнала напряжения, блок 57 формирования асинхронного несущего сигнала, блок 58 формирования синхронной трехимпульсной несущей, переключатель 59, компараторы 61-63 и инвертирующие схемы 64-66.
Вычислитель 55 командного сигнала напряжения формирует командный сигнал Vu* напряжения U-фазы, командный сигнал Vv* напряжения V-фазы и командный сигнал Vw* напряжения W-фазы, которые служат в качестве командных сигналов трехфазного напряжения, на основе коэффициента PMF модуляции и угла θ управляющей фазы согласно формулам (13)-(15)

В формулах (13)-(15) PMFM представляет, как пояснено ниже, амплитуду командного сигнала напряжения, которая получается умножением коэффициента PMF модуляции на выходную величину из таблицы 54 регулируемого коэффициента усиления.
Дополнительно, как пояснено ниже, несущий сигнал CAR, который должен сравниваться с каждым из командных сигналов напряжения, описанных выше, включает в себя, по меньшей мере, синхронный несущий сигнал и асинхронный несущий сигнал, так что несущий сигнал CAR является выбираемым согласно импульсному режиму, который был выбран посредством блока 60 обработки переключения импульсного режима, служащего в качестве блока управления импульсным режимом. Синхронный несущий сигнал получается посредством определения частоты несущего сигнала CAR в качестве функции выходной частоты FINV инвертора таким образом, что число импульсов и положения импульсов, формирующих структуру выходного напряжения инвертора, равны у положительного полупериода и отрицательного полупериода выходного напряжения инвертора. Асинхронный несущий сигнал - это сигнал, который не является синхронным несущим сигналом и является несущим сигналом, имеющим частоту, которая была определена безотносительно выходной частоты FINV инвертора. Например, асинхронный несущий сигнал - это несущий сигнал, имеющий частоту, равную 100 Гц, которая является предельной частотой переключения для переключающего элемента, используемого для железнодорожного вагона с электроприводом. Также согласно первому варианту осуществления поясняется пример, в котором в качестве синхронного несущего сигнала используется синхронный трехимпульсный несущий сигнал, в котором три импульса напряжения включены в полупериод выходного напряжения инвертора; однако настоящее изобретение не ограничено этим примером. Например, в качестве синхронного несущего сигнала могут использоваться другие сигналы, такие как синхронный пятиимпульсный несущий сигнал. Возможна еще одна компоновка, в которой множество синхронных несущих сигналов подготавливаются таким образом, что используемый синхронный несущий сигнал при необходимости переключается среди множества синхронных несущих сигналов.
Как пояснено выше, коэффициент PMFM, используемый в формулах (13)-(15), является амплитудой командного сигнала напряжения, которая получается умножителем 53 посредством умножения коэффициента PMF модуляции на выходную величину таблицы 54 регулируемого коэффициента усиления. Таблица 54 регулируемого коэффициента усиления используется для корректировки соотношения между выходным напряжением VM инвертора и коэффициентом PMF модуляции, который изменяется в зависимости от того, используется ли асинхронный импульсный режим или синхронный трехимпульсный режим. Содержание таблицы 54 регулируемого коэффициента усиления поясняется ниже.
В асинхронном импульсном режиме максимальное напряжение (т.е. эффективное значение), которое имеет возможность выводиться инвертором без искажений, равно 0,612·EFC. В противоположность этому в синхронном трехимпульсном режиме, максимальное напряжение равно 0,7797·EFC. Другими словами, для одного и того же коэффициента PMF модуляции отношение выходного напряжения инвертора в асинхронном импульсном режиме к выходному напряжению в синхронном трехимпульсном режиме равно 1/1,274. Чтобы свести к нулю разницу между обоими, в асинхронном импульсном режиме коэффициент PMF модуляции умножается на 1,274, так что результат может быть введен в качестве амплитуды PMFM командного сигнала напряжения в вычислитель 55 командного сигнала напряжения, описанный выше. В противоположность этому в синхронном импульсном режиме коэффициент PMF модуляции умножается на 1,0, так что результат может быть введен в качестве амплитуды PMFM командного сигнала напряжения в вычислитель 55 командного сигнала напряжения, описанный выше.
Впоследствии командный сигнал Vu* напряжения U-фазы, командный сигнал Vv* напряжения V-фазы и командный сигнал Vw* напряжения W-фазы, которые были выведены вычислителем 55 командного сигнала напряжения, сравниваются с несущим сигналом CAR компараторами 61-63, соответственно, так, чтобы определить, какой из них больше. Дополнительно, формируются стробирующие сигналы U, V, W, которые являются результатами процессов сравнения, а также стробирующие сигналы X, Y и Z, которые получаются дополнительным выводом результатов сравнения через инвертирующие схемы 64-66. Несущий сигнал CAR является сигналом, который переключатель 59 вызвал посредством блока 60 обработки переключения импульсного режима, чтобы выбирать между асинхронным несущим сигналом A (который в настоящем примере является несущим сигналом, который обычно имеет частоту, приблизительно равную 1000 Гц максимум), который был сформирован блоком 57 формирования асинхронного несущего сигнала, синхронным трехимпульсным сигналом B, который был сформирован блоком 58 формирования синхронного трехимпульсного несущего сигнала, и нулевым значением C, которое выбирается в отношении одноимпульсного режима. Асинхронный несущий сигнал A и синхронный трехимпульсный несущий сигнал B, каждый, имеют значение в диапазоне от -1 до 1 с центром около нуля.
Далее будут пояснена работа блока 60 обработки переключения импульсного режима. Сначала в качестве традиционного примера будет пояснен способ, который применяется к устройству управления электродвигателем, которое приводит в движение и управляет асинхронным электродвигателем. Фиг.7 - это схема для пояснения операции переключения импульсного режима согласно традиционному способу. Как показано на фиг.7, импульсный режим переключается между асинхронным импульсным режимом, синхронным импульсным режимом (например, синхронным трехимпульсным режимом) и одноимпульсным режимом согласно коэффициенту PMF модуляции. Более конкретно, переключатель 59 переключается так, чтобы выбирать сторону асинхронной несущей A в диапазоне, где коэффициент PMF модуляции мал (т.е. коэффициент PMF модуляции равен или меньше, чем первое заданное значение), так, чтобы выбирать сторону синхронной трехимпульсной несущей B, когда коэффициент PMF модуляции равен или больше первого заданного значения, но меньше, чем третье заданное значение, и так, чтобы выбирать сторону нулевого значения C, когда коэффициент PMF модуляции достиг третьего заданного значения. В последующем пояснении будет обсужден пример, в котором в качестве первого заданного значения используется 0,785 (=1/1,274), тогда как в качестве третьего заданного значения используется 1,0.
В этой ситуации, когда импульсный режим является синхронным трехимпульсным режимом, возможно иметь выходной сигнал напряжения, коэффициент PMF модуляции которого равен или больше, чем 0,785, который не может выводиться в асинхронном импульсном режиме. В качестве дополнительной информации, даже при способе, посредством которого в асинхронном импульсном режиме происходит перемодуляция, в синхронном пятиимпульсном режиме, в синхронном девятиимпульсном режиме или т.п. возможно иметь выходной сигнал напряжения, который соответствует синхронному трехимпульсному режиму. Однако в этой ситуации, так как соотношение между коэффициентом PMF модуляции и выходным напряжением инвертора 2 становится нелинейным, необходимо корректировать нелинейное соотношение, и конфигурация поэтому становится более сложной.
В противоположность, в случае, где традиционный способ, описанный выше, применяется к устройству управления электродвигателем, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами, возникает проблема, описанная ниже.
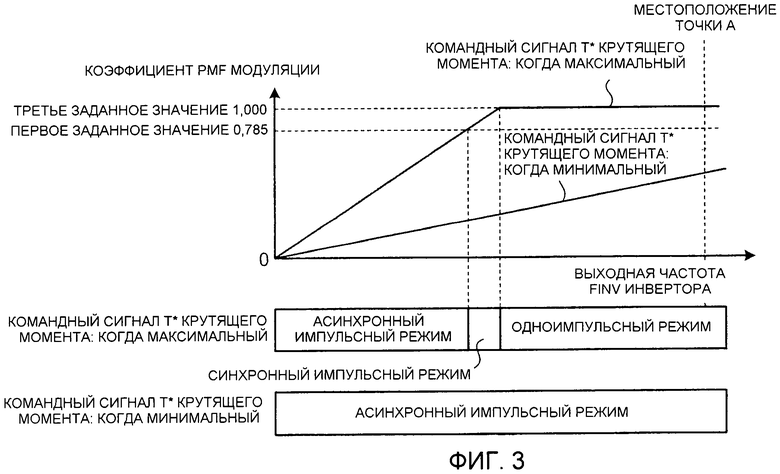
Фиг.3 - это схема для пояснения работы, которая выполняется в ситуации, когда традиционный способ переключения импульсного режима применяется к устройству управления электродвигателем, которое приводит в действие и управляет синхронным электродвигателем с постоянными магнитами. На фиг.3 показаны импульсные режимы, которые выбираются согласно соотношению между выходной частотой FINV инвертора и коэффициентом PMF модуляции, в то время как командный сигнал T* крутящего момента используется в качестве параметра. Как показано на фиг.3, соотношение между коэффициентом PMF модуляции и выходной частотой FINV инвертора значительно изменяется согласно значению командного сигнала T* крутящего момента. На фиг.3 сфокусируемся на ситуации, когда, например, железнодорожный вагон с электроприводом выполняет операцию включения электропитания и ускорения с максимальным крутящим моментом, близким к максимальной скорости вращения (в точке A, показанной на фиг.3). В этой ситуации максимальное значение вводится в качестве командного сигнала T* крутящего момента таким образом, что инвертор работает в одноимпульсном режиме, в котором выводится максимальное выходное напряжение. При таких обстоятельствах рассмотрим ситуацию, в которой операция выполняется таким образом, чтобы уменьшать командный сигнал T* крутящего момента до минимального значения с целью, например, прекращения ускорения железнодорожного вагона с электроприводом и поддержания скорости вращения на постоянном уровне. В этой ситуации коэффициент PMF модуляции, вычисленный на основе командного сигнала id* тока d-оси и командного сигнала iq* тока q-оси, которые были вычислены блоком 10 формирования командного сигнала тока, значительно падает относительно третьего заданного значения 1,0, которое является максимальным значением, как показано на фиг.3.
В случае, когда коэффициент PMF модуляции упал до значения, которое равно или меньше, чем 0,785, которое является первым заданным значением, асинхронный импульсный режим выбирается согласно традиционному способу. Однако, так как асинхронная несущая частота равна 1000 Гц, максимум, относительно, например, выходной частоты инвертора, равной 300 Гц, число импульсов, которые включены в полупериод выходного напряжения инвертора, приблизительно равно 3, что чрезвычайно мало. Когда электродвигатель приводится в действие в таком состоянии, будут ситуации, в которых несущая частота не делится на выходную частоту инвертора. В таких ситуациях число импульсов и позиции импульсов, которые включены в положительный полупериод и в отрицательный полупериод выходного напряжения инвертора (далее в данном документе "выходное напряжение инвертора" ссылается на линейное напряжение, пока не отмечено иное), неуравновешены. В результате, возникает проблема, когда положительная/отрицательная симметричность напряжения, приложенного к электродвигателю, теряется, и возникают шум и/или вибрации из-за колебаний тока и/или пульсаций крутящего момента, возникающих в электродвигателе.
Чтобы разрешить проблему, описанную выше, блок 60 обработки переключения импульсного режима согласно первому варианту осуществления сконфигурирован так, чтобы обращаться к самой выходной частоте FINV инвертора, которая является количественным параметром, относящимся к выходной частоте инвертора, в дополнение к коэффициенту PMF модуляции, который является количественным параметром, относящимся к амплитуде выходного напряжения инвертора, и так, чтобы переключать импульсный режим на основе коэффициента PMF модуляции и выходной частоты FINV инвертора согласно изменениям в уровне выходного крутящего момента T*. Относительно выбора количественного параметра, связанного с амплитудой выходного напряжения инвертора, и количественного параметра, связанного с выходной частотой инвертора, настоящее изобретение не ограничено примерами, которые выбраны в первом варианте осуществления. Допустимо выбирать любые количественные параметры произвольным образом, пока количественные параметры являются функциями амплитуды выходного напряжения инвертора и выходной частоты инвертора, соответственно.
На Фиг.4 показана схема для пояснения операции переключения импульсного режима согласно первому варианту осуществления. На фиг.4 показаны импульсные режимы, которые выбираются согласно соотношению между выходной частотой FINV инвертора и коэффициентом PMF модуляции, в то время как командный сигнал T* крутящего момента используется в качестве параметра. Также на фиг.4 в дополнение к первому заданному значению и третьему заданному значению, касающемуся коэффициента PMF модуляции, показано второе заданное значение относительно выходной частоты FINV инвертора.
Подобно примеру, поясненному выше, рассмотрим ситуацию, в которой, в то время как инвертор работает в одноимпульсном режиме, в котором выводится максимальный крутящий момент, операция выполняется таким образом, чтобы уменьшать командный сигнал T* крутящего момента до минимального значения с целью, например, прекращения ускорения железнодорожного вагона с электроприводом и поддержания скорости вращения на постоянном уровне. В этой ситуации, как показано на фиг.4, в местоположении точки A делается ссылка на выходную частоту FINV инвертора в дополнение к коэффициенту PMF модуляции. В случае, где выходная частота FINV инвертора все еще равна или выше, чем второе заданное значение, даже после того, как коэффициент PMF модуляции становится меньше, чем первое заданное значение, асинхронный импульсный режим не будет выбран, а импульсный режим удерживается в синхронном импульсном режиме. Другими словами, синхронный импульсный режим переключается в асинхронный импульсный режим в ситуации, когда коэффициент PMF модуляции становится меньше, чем первое заданное значение, а также, когда выходная частота FINV инвертора становится ниже, чем второе заданное значение. Наоборот, в ситуации, когда коэффициент PMF модуляции увеличивается, начиная от нуля, даже если коэффициент PMF модуляции меньше, чем первое заданное значение, пока выходная частота FINV инвертора равна или выше, чем второе заданное значение, асинхронный импульсный режим переключается в синхронный импульсный режим. Другими словами, асинхронный импульсный режим переключается в синхронный импульсный режим в ситуации, когда коэффициент PMF модуляции становится равным или больше, чем первое заданное значение, или в ситуации, когда выходная частота FINV инвертора становится равной или выше, чем второе заданное значение.
Чтобы определять второе заданное значение, предпочтительно обеспечить то, чтобы число импульсов, включенных в полупериод выходного напряжения инвертора, было равно или больше, чем предварительно определенное значение. Также посредством моделирований и т.п. стало понятно, что предпочтительно конфигурировать предварительно определенное значение таким образом, чтобы оно было равно 8 или больше. Более конкретно, в случае, когда количество импульсов, которые включены в полупериод выходного напряжения инвертора, приблизительно равно 8, даже если возникает ситуация, когда несущая частота не делится на выходную частоту инвертора, степень дисбаланса в числе импульсов и позициях импульсов в положительном полупериоде и отрицательном полупериоде выходного напряжения инвертора уменьшается. В результате, возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю, до степени, которая не вызывает проблем при практическом использовании. Разумеется, чем больше число импульсов, тем лучше.
Дополнительно, синхронный импульсный режим переключается на одноимпульсный режим в момент времени, когда коэффициент PMF модуляции становится равным или большим, чем третье заданное значение. Также одноимпульсный режим переключается на синхронный импульсный режим в момент времени, когда коэффициент PMF модуляции становится меньше, чем третье заданное значение.
Операции, описанные выше, которые выполняются во время переходов между синхронным импульсным режимом и асинхронным импульсным режимом согласно первому варианту осуществления, могут быть обобщены ниже.
Асинхронный импульсный режим переключается на синхронный импульсный режим при условии, когда коэффициент PMF модуляции, который является количественным параметром, относящимся к амплитуде выходного напряжения инвертора, становится равным или больше, чем первое заданное значение, или когда выходная частота FINV инвертора, которая является количественным параметром, относящимся к выходной частоте инвертора, становится равной или выше, чем второе заданное значение. Синхронный импульсный режим переключается в асинхронный импульсный режим при условии, когда коэффициент PMF модуляции, который является количественным параметром, относящимся к амплитуде выходного напряжения инвертора, становится меньше, чем первое заданное значение, или когда выходная частота FINV инвертора, которая является количественным параметром, относящимся к выходной частоте инвертора, становится ниже, чем второе заданное значение. Второе заданное значение определяется с точки зрения обеспечения того, что число импульсов, включенных в полупериод основной синусоиды выходного напряжения инвертора, равно или больше, чем предварительно определенное значение. Другими словами, второе заданное значение определяется на основе приложенной частоты асинхронного несущего сигнала и числа импульсов, которое требуется, чтобы сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю, до степени, которая не вызывает проблем при практическом использовании.
Согласно первому варианту осуществления, в случае, когда, например, второе заданное значение устанавливается при обеспечении того, что число импульсов, включенных в полупериод выходного напряжения инвертора, равно 8, импульсный режим удерживается в синхронном импульсном режиме до тех пор, пока выходная частота инвертора не станет равной или ниже, чем 125 Гц, что равно одной восьмой частоты асинхронного несущего сигнала (т.е. 1000 Гц). В результате, возможно конфигурировать число импульсов и позиции импульсов, формирующих структуру выходного напряжения инвертора, таким образом, чтобы обеспечивалось равенство между положительным полупериодом и отрицательным полупериодом выходного напряжения инвертора. Таким образом, возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю. Следовательно, возможно получать устройство управления электродвигателем, которое не вызывает шума и/или вибраций в результате колебаний тока и/или пульсаций крутящего момента, возникающих в электродвигателе.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
В качестве другого способа достижения такого же полезного воздействия, который достигнут в первом варианте осуществления, приемлемо использовать соотношение между, например, выходной частотой FINV инвертора и частотой асинхронного несущего сигнала, т.е. показатель числа импульсов, который является количественным параметром, основанным на числе импульсов, включенных в полупериод основной синусоиды выходного напряжения инвертора, так что в случае, когда показатель числа импульсов больше, чем четвертое заданное значение, выбираемым является асинхронный импульсный режим. Показатель числа импульсов может быть, например, самим числом импульсов.
На Фиг.5 показана схема для пояснения операции переключения импульсного режима согласно второму варианту осуществления настоящего изобретения. На фиг.5 показаны импульсные режимы, которые выбираются согласно соотношению между выходной частотой FINV инвертора и коэффициентом PMF модуляции, в то время как командный сигнал T* крутящего момента используется в качестве параметра.
В случае, где коэффициент PMF модуляции уменьшается, начиная от 1,0, даже если коэффициент PMF модуляции меньше, чем первое заданное значение, пока показатель числа импульсов меньше, чем четвертое заданное значение, импульсный режим не будет переключаться в асинхронный импульсный режим, а удерживается в синхронном импульсном режиме. Другими словами, синхронный импульсный режим переключается в асинхронный импульсный режим в ситуации, когда коэффициент PMF модуляции меньше, чем первое заданное значение, а также показатель числа импульсов равен или больше, чем четвертое заданное значение.
Наоборот, в ситуации, когда коэффициент PMF модуляции увеличивается, начиная от нуля, даже если коэффициент PMF модуляции меньше, чем первое заданное значение, пока показатель числа импульсов меньше, чем четвертое заданное значение, асинхронный импульсный режим переключается в синхронный импульсный режим. Другими словами, асинхронный импульсный режим переключается в синхронный импульсный режим в ситуации, когда коэффициент PMF модуляции равен или больше, чем первое заданное значение, или где показатель числа импульсов меньше, чем четвертое заданное значение.
Как пояснено в описании первого варианта осуществления, четвертое заданное значение определяется на основе приложенной частоты асинхронного несущего сигнала и числа импульсов, которое требуется, чтобы сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю, до степени, которая не вызывает проблем при практическом использовании. Предпочтительно конфигурировать четвертое заданное значение так, чтобы оно было равно 8 или больше.
Согласно второму варианту осуществления в случае, когда четвертое заданное значение устанавливается при обеспечении того, что число импульсов, включенных в полупериод выходного напряжения инвертора, равно, например, 8 или больше, импульсный режим удерживается в синхронном импульсном режиме до тех пор, пока выходная частота инвертора не станет равной или ниже, чем 125 Гц, что равно одной восьмой частоты асинхронного несущего сигнала (т.е. 1000 Гц). В результате, возможно конфигурировать число импульсов и позиции импульсов, формирующих структуру выходного напряжения инвертора, таким образом, чтобы выполнялось равенство между положительным полупериодом и отрицательным полупериодом выходного напряжения инвертора. Таким образом, возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю. Следовательно, возможно получать устройство управления электродвигателем, которое не вызывает шума и/или вибраций от колебаний тока и/или пульсаций крутящего момента, возникающих в электродвигателе. Другие конфигурации, операции и полезные эффекты второго варианта осуществления являются такими же, что и в первом варианте осуществления.
ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
На Фиг.6 показана схема для пояснения операции переключения импульсного режима согласно третьему варианту осуществления настоящего изобретения. Как показано на фиг.6, так как коэффициент PMF модуляции является количественным параметром, который изменяется в зависимости от выходного крутящего момента, возможно конфигурировать первое заданное значение таким образом, чтобы оно было изменяемым согласно командному сигналу T* крутящего момента. Как показано на фиг.6, когда командный сигнал T* крутящего момента является большим, первое заданное значение устанавливается в большое значение, тогда как, когда командный сигнал T* крутящего момента мал, первое заданное значение устанавливается в малое значение. Дополнительно, асинхронный импульсный режим переключается в синхронный импульсный режим в ситуации, когда коэффициент PMF модуляции, который является количественным параметром, связанным с амплитудой выходного напряжения инвертора, становится равным или большим, чем первое заданное значение, которое устанавливается согласно командному сигналу T* крутящего момента. Кроме того, синхронный импульсный режим переключается в асинхронный импульсный режим в ситуации, когда коэффициент PMF модуляции, который является количественным параметром, связанным с амплитудой выходного напряжения инвертора, становится меньше, чем первое заданное значение, которое устанавливается согласно командному сигналу T* крутящего момента.
Согласно этому способу нет необходимости устанавливать второе заданное значение. Кроме того, согласно этому способу непосредственное обращение к выходной частоте FINV инвертора, которая включает в себя механический угол θm ротора электродвигателя и является количественным параметром, который может иметь резкое временное изменение согласно состоянию вращения электродвигателя, не выполняется. Вместо этого выполняется обращение к командному сигналу T* крутящего момента, который был сформирован упреждающим образом. В результате, в ситуации, когда скорость вращения электродвигателя изменяется синхронно, например, со свободным вращением и/или проскальзыванием колеса, которое может, как правило, происходить в железнодорожных вагонах с электроприводом, так что выходная частота FINV инвертора, в результате, меняется в виде колебаний, идущих выше и ниже второго заданного значения, при этом возможно избежать ситуации, в которой импульсный режим переключается между асинхронным импульсным режимом и синхронным импульсным режимом с явлением вибрации.
Разумеется, чтобы определять первое заданное значение, которое является переменным значением, предпочтительно обеспечивать, чтобы число импульсов, включенных в полупериод выходного напряжения инвертора, было равно или больше, чем предварительно определенное значение (например, 8 или больше), как пояснено в описании первого варианта осуществления.
Согласно третьему варианту осуществления возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю. Следовательно, возможно создать устройство управления электродвигателем, которое не вызывает шума и/или вибраций, получающихся от колебаний тока и/или пульсаций крутящего момента, происходящих в электродвигателе. Кроме того, в случае, где выходная частота FINV инвертора колеблется около второго заданного значения, проходя над и под значением, возможно избегать ситуации, в которой импульсный режим переключается между асинхронным импульсным режимом и синхронным импульсным режимом при явлении вибрации. Другие конфигурации, операции и полезные воздействия третьего варианта осуществления являются такими же, что и в первом варианте осуществления.
Как пояснено выше, с первого по третий варианты осуществления импульсный режим переключается на основе двух количественных параметров, каждый из которых связан с выходным состоянием инвертора. Другими словами, импульсный режим переключается на основе коэффициента PMF модуляции и выходной частоты FINV инвертора согласно первому варианту осуществления, на основе коэффициента PMF модуляции и показателя числа импульсов согласно второму варианту осуществления и на основе коэффициента PMF модуляции и командного сигнала T* крутящего момента согласно третьему варианту осуществления. В противоположность, согласно традиционному способу управления, как показано на фиг.7, импульсный режим переключается только на основе коэффициента PMF модуляции. В случае, где такой традиционный способ управления применяется к электродвигателю, в котором коэффициент PMF модуляции сильно изменяется согласно уровню командного сигнала T* крутящего момента, проблема возникает, когда возникают колебания тока и/или пульсации крутящего момента. Согласно первому-третьему вариантам осуществления, однако, так как количественный параметр, связанный с выходным состоянием инвертора, используется в дополнение к коэффициенту модуляции, возможно обращаться к изменениям в уровне коэффициента PMF модуляции, которые возникают согласно уровню командного сигнала T* крутящего момента. Дополнительно, так как используются два количественных параметра, каждый из которых связан с выходным состоянием инвертора, возможно ссылаться на число импульсов, включенных в период основной синусоиды выходного напряжения инвертора. В результате, соответствующим образом устанавливая заданные значения, используемые для переключения между синхронным импульсным режимом и асинхронным импульсным режимом, на основе числа импульсов, возможно осуществлять управление, в то время как достаточное внимание уделяется положительной/отрицательной симметричности напряжения, приложенного к электродвигателю.
ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее будет пояснена операция, которая выполняется, когда инвертор 2 выключается с целью прекращения операции подачи электропитания или операции рекуперации энергии во время движения железнодорожного вагона с электроприводом.
Рассмотрим ситуацию, в которой, пока инвертор 2 работает в одноимпульсном режиме, команда OFF (выключение) (не показана), инструктирующая о том, что операция подачи электропитания или операция рекуперации энергии железнодорожного вагона с электроприводом должна быть выключена, была подана на устройство 100 управления электродвигателем из внешнего управляющего устройства (не показано). В этой ситуации внешнее управляющее устройство постепенно уменьшает командный сигнал T* крутящего момента до нуля в то же самое время. Командный сигнал T* крутящего момента падает с максимального значения до нуля приблизительно за одну секунду. В этой ситуации устройство 100 управления электродвигателем выполняет этапы управления, описанные ниже.
В момент времени, когда коэффициент PMF модуляции становится меньше чем 1,0 из-за уменьшения командного сигнала T* крутящего момента, блок 60 обработки переключения импульсного режима переключает импульсный режим с одноимпульсного режима в синхронный импульсный режим. После этого, даже если коэффициент PMF модуляции становится меньше, чем первое заданное значение, блок 60 обработки переключения импульсного режима не переключает импульсный режим в асинхронный импульсный режим, а уменьшает коэффициент PMF модуляции, в то же время удерживая импульсный режим в синхронном импульсном режиме. После того, как командный сигнал T* крутящего момента достаточно уменьшился, все стробирующие сигналы U, V, W, X, Y и Z, предоставленные для инвертора 2, выключаются.
В качестве примера другой ситуации рассмотрим ситуацию, в которой, пока инвертор 2 работает в синхронном импульсном режиме, команда OFF (не показана), инструктирующая о том, что операция подачи электропитания или операция рекуперации энергии железнодорожного вагона с электроприводом должна быть выключена, была подана на устройство 100 управления электродвигателем от внешнего управляющего устройства. В этой ситуации внешнее управляющее устройство постепенно уменьшает командный сигнал T* крутящего момента до нуля в то же самое время. Командный сигнал T* крутящего момента падает с максимального значения до нуля приблизительно за одну секунду. В этой ситуации устройство 100 управления электродвигателем выполняет этапы управления, описанные ниже.
Даже если коэффициент PMF модуляции становится меньше, чем первое заданное значение, из-за уменьшения командного сигнала T* крутящего момента, блок 60 обработки переключения импульсного режима не переключает импульсный режим в асинхронный импульсный режим, а уменьшает коэффициент PMF модуляции, в то же время удерживая импульсный режим в синхронном импульсном режиме. После того, как командный сигнал T* крутящего момента достаточно уменьшился, все стробирующие сигналы U, V, W, X, Y и Z, предоставленные для инвертора 2, выключаются.
Как пояснено выше, согласно четвертому варианту осуществления в случае, когда инвертор 2 остановлен с целью прекращения операции подачи электропитания или операции рекуперации энергии железнодорожного вагона с электроприводом, пока инвертор 2 работает в одноимпульсном режиме или в синхронном импульсном режиме, блок 60 обработки переключения импульсного режима сконфигурирован таким образом, чтобы удерживать импульсный режим в синхронном импульсном режиме так, что асинхронный импульсный режим не может быть выбран. В результате, даже в ситуации, когда инвертор 2 выключен, пока выходная частота инвертора находится в диапазоне высоких частот, возможно конфигурировать число импульсов и позиции импульсов, формирующих структуру выходного напряжения инвертора, так, чтобы соблюдалось равенство между положительным полупериодом и отрицательным полупериодом выходного напряжения инвертора. Таким образом, возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю. Следовательно, возможно получать устройство управления электродвигателем, которое способно устойчивым образом останавливать инвертор 2 без повреждения, без возникновения каких-либо колебаний тока или пульсаций крутящего момента в электродвигателе. Дополнительно, так как блок 60 обработки переключения импульсного режима сконфигурирован таким образом, чтобы не выбирать асинхронный импульсный режим, возможно избегать ситуации, в которой импульсный режим переключается множество раз в течение короткого периода времени (т.е., приблизительно в одну секунду) прежде, чем командный сигнал T* крутящего момента уменьшится до нуля. Следовательно, возможно избежать неустойчивости управления, вызванной, например, задержками во времени переключения.
ПЯТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее будет пояснена операция, которая выполняется, чтобы запускать инвертор 2 с целью начала операции подачи электропитания или операции рекуперации энергии железнодорожного вагона с электроприводом в ситуации, когда железнодорожный вагон с электроприводом движется по инерции, в то время как выходная частота FINV инвертора, которая является количественным параметром, связанным с выходной частотой инвертора, равна или выше, чем второе заданное значение.
Рассмотрим ситуацию, в которой, пока инвертор 2 остановлен, команда запуска (не показана), инструктирующая о том, что операция подачи электропитания или операция рекуперации энергии железнодорожного вагона с электроприводом должна быть начата, была подана на устройство 100 управления электродвигателем от внешнего управляющего устройства (не показано). В этой ситуации внешнее управляющее устройство постепенно увеличивает командный сигнал T* крутящего момента до предварительно определенного значения в то же самое время. Командный сигнал T* крутящего момента может повышаться от нуля до предварительно определенного значения приблизительно за одну секунду. В этой ситуации устройство 100 управления электродвигателем выполняет этапы управления, описанные ниже.
Процесс переключения со стробирующими сигналами U, V, W, X, Y и Z, предоставленными для инвертора 2, начинается благодаря команде запуска, но даже если коэффициент PMF модуляции меньше, чем первое заданное значение, блок 60 обработки переключения импульсного режима начинает работу, в то же время используя синхронный импульсный режим в качестве начальной установки импульсного режима, несмотря на то, что коэффициент PMF модуляции меньше, чем первое заданное значение. После этого в момент времени, когда коэффициент PMF модуляции увеличился так, чтобы стать равным или больше чем 1,0, блок 60 обработки переключения импульсного режима переключает импульсный режим в одноимпульсный режим. Альтернативно, в момент времени, когда коэффициент PMF модуляции уменьшился так, чтобы стать меньше, чем первое заданное значение, а также, когда выходная частота FINV инвертора становится ниже, чем второе заданное значение, блок 60 обработки переключения импульсного режима переключает импульсный режим в асинхронный импульсный режим.
Как пояснено выше, согласно пятому варианту осуществления настоящего изобретения в ситуации, когда инвертор 2 запускается в таком состоянии, где железнодорожный вагон с электроприводом движется по инерции, в то время как выходная частота FINV инвертора, которая является количественным параметром, связанным с выходной частотой инвертора, равна или выше, чем второе заданное значение, блок 60 обработки переключения импульсного режима начинает работу, в то же время используя синхронный импульсный режим в качестве первоначальной установки импульсного режима, так что асинхронный импульсный режим не может быть выбран. В результате, даже в ситуации, когда инвертор 2 запускается, пока выходная частота инвертора находится в диапазоне высоких частот, возможно конфигурировать, от момента времени непосредственно после запуска, число импульсов и позиции импульсов, формирующих структуру выходного напряжения инвертора, таким образом, чтобы соблюдалось равенство между положительным полупериодом и отрицательным полупериодом выходного напряжения инвертора. Таким образом, возможно сохранять положительную/отрицательную симметричность напряжения, приложенного к электродвигателю. Следовательно, возможно получить устройство управления электродвигателем, которое способно устойчивым образом запускать инвертор 2 без повреждения, без возникновения каких-либо колебаний тока или пульсаций крутящего момента в электродвигателе.
В некоторых частях описания первого-пятого вариантов осуществления настоящее изобретение поясняется с помощью ситуации, когда железнодорожный вагон с электроприводом выполняет операцию подачи электропитания в качестве примера. Однако на основе той же самой идеи можно применять настоящее изобретение даже в ситуации, когда железнодорожный вагон с электроприводом понижает скорость, в то же время используя рекуперативное торможение.
Дополнительно, настоящее изобретение было пояснено с помощью устройства управления электродвигателем, которое управляет синхронным электродвигателем с постоянными магнитами в качестве примера. Однако возможно применять настоящее изобретение к устройству управления электродвигателем, которое приводит в действие и управляет другими типами электродвигателей. Кроме того, хотя настоящее изобретение было пояснено с помощью конфигурации с трехфазным переменным током в качестве примера, возможно применять настоящее изобретение к другим конфигурациям.
Конфигурации, которые описаны в примерных вариантах осуществления выше, являются примерами настоящего изобретения. Разумеется, можно объединять настоящее изобретение с другими широко известными способами. Также возможно применять модификации к настоящему изобретению, например, опуская одну или более его частей, без отступления от сути настоящего изобретения.
Кроме того, в настоящем описании настоящее изобретение поясняется с допущением того, что оно применяется к устройству управления электродвигателем, используемым для приведения в движение железнодорожного вагона с электроприводом. Однако области, к которым настоящее изобретение может быть применено, не ограничиваются этим примером. Разумеется, можно применять настоящее изобретение к другим различным связанным областям, таким как электромобили, погрузчики и т.п.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Как пояснено выше, устройство управления электродвигателем согласно аспекту настоящего изобретения полезно в качестве устройства управления электродвигателем, которое управляет синхронным электродвигателем с постоянными магнитами.
ПОЯСНЕНИЯ К БУКВЕННЫМ ИЛИ ЧИСЛОВЫМ ССЫЛКАМ
1: конденсатор
2: инвертор
3, 4, 5: датчик тока
8: датчик напряжения
10: блок формирования командного сигнала тока
11: блок формирования командного сигнала базового тока d-оси
20: блок управления током d-оси
21: вычислитель развязки q-оси
22: вычислитель развязки d-оси
23: блок управления током q-оси
30: вычислитель коэффициента модуляции
40: вычислитель угла управления фазы
50: блок формирования командного сигнала напряжения/PWM
53: умножитель
54: таблица регулируемого коэффициента усиления
55: вычислитель командного сигнала напряжения
57: блок формирования асинхронного несущего сигнала
58: блок формирования синхронного трехимпульсного несущего сигнала
59: переключатель
60: блок обработки переключения импульсного режима
61-63: компаратор
64-66: инвертирующая схема
70: вычислитель угловой частоты инвертора
90: блок преобразования трехфазных координат dq-осей
95: вычислитель угла опорной фазы
100: устройство управления электродвигателем.
Изобретение относится к области электротехники и может быть использовано в электродвигателе переменного тока для приведения в движение железнодорожного вагона. Техническим результатом является обеспечение устойчивости управления путем снижения колебаний тока и пульсаций крутящего момента и снижение шума и вибраций при управлении электродвигателем. В устройстве (100) управления для синхронного электродвигателя с постоянными магнитами асинхронный импульсный режим переключается в синхронный импульсный режим в ситуации, когда коэффициент модуляции становится равным или больше, чем первое заданное значение, или в ситуации, когда выходная частота инвертора (2) становится равной или выше, чем второе заданное значение. Синхронный импульсный режим переключается в асинхронный импульсный режим в ситуации, когда коэффициент модуляции становится меньше, чем первое заданное значение, а также выходная частота инвертора (2) становится ниже, чем второе заданное значение. Задавая второе заданное значение таким образом, что число импульсов, включенных в полупериод основной синусоиды выходного напряжения инвертора (2), равно или больше, чем предварительно определенное значение, возможно препятствовать возникновению колебаний тока и пульсаций крутящего момента в электродвигателе. 4 н. и 9 з.п. ф-лы, 7 ил.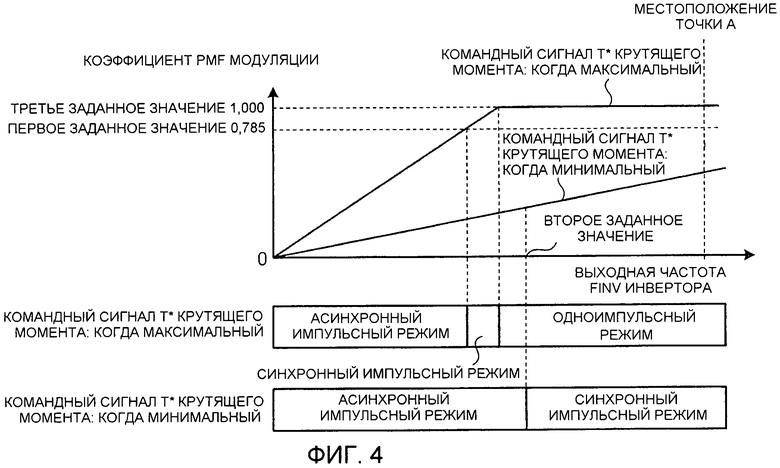
1. Устройство (100) управления электродвигателем, предназначенное для управления электродвигателем переменного тока путем вывода сигнала щиротно-импульсной модуляции к переключающему элементу, включенному в инвертор (2), который подключен к источнику (1) питания постоянного тока и выполнен с возможностью выдачи переменного тока, имеющего произвольную частоту и произвольное напряжение, к электродвигателю переменного тока, содержащее: блок (60) управления импульсным режимом, который выполнен с возможностью выборочного переключения между множеством импульсных режимов, каждый из которых может служить в качестве выходного образца сигнала широтно-импульсной модуляции, при этом множество импульсных режимов включает в себя синхронный импульсный режим, асинхронный импульсный режим и одноимпульсный режим, при этом упомянутый блок (60) управления импульсным режимом выполнен с возможностью переключения между синхронным импульсным режимом и асинхронным импульсным режимом на основе количественного параметра, связанного с амплитудой выходного напряжения инвертора (2), и количественного параметра, связанного с выходной частотой инвертора (2), упомянутый блок (60) управления импульсным режимом выполнен с возможностью переключения из асинхронного импульсного режима в синхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится равным или больше, чем первое заданное значение, или в ситуации, когда количественный параметр, связанный с выходной частотой инвертора (2), становится равным или больше, чем второе заданное значение, и упомянутый блок (60) управления импульсным режимом выполнен с возможностью переключения из синхронного импульсного режима в асинхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится меньше, чем первое заданное значение, а также в ситуации, когда количественный параметр, связанный с выходной частотой инвертора (2), становится меньше, чем второе заданное значение.
2. Устройство (100) управления электродвигателем по п.1, в котором блок (60) управления импульсным режимом выполнен с возможностью переключения из синхронного импульсного режима в одноимпульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится равным или больше, чем третье заданное значение, которое больше, чем первое заданное значение, при этом упомянутый блок (60) управления импульсным режимом выполнен с возможностью переключения из одноимпульсного режима в синхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится меньше, чем третье заданное значение.
3. Устройство (100) управления электродвигателем по п.1 или 2, в котором второе заданное значение задается так, что число, указывающее, сколько импульсов включено в полупериод основной синусоиды выходного напряжения инвертора (2), равно 8 или больше.
4. Устройство (100) управления электродвигателем по п.1, которое установлено в железнодорожном вагоне с электроприводом, при этом для запуска инвертора (2), который остановлен во время движения железнодорожного вагона с электроприводом под уклон, в ситуации, когда количественный параметр, связанный с выходной частотой инвертора (2), равен или больше, чем второе заданное значение, устройство (100) управления электродвигателем выполнено с возможностью выполнения этапа управления, на котором используется синхронный импульсный режим в качестве первоначальной установки импульсных режимов.
5. Устройство (100) управления электродвигателем, предназначенное для управления электродвигателем переменного тока путем вывода сигнала широтно-импульсной модуляции к переключающему элементу, включенному в инвертор (2), который подключен к источнику (1) питания постоянного тока и выполнен с возможностью выдачи переменного тока, имеющего произвольную частоту и произвольное напряжение, к электродвигателю переменного тока, содержащее: блок (60) управления импульсным режимом, выполненный с возможностью выборочного переключения между множеством импульсных режимов, каждый из которых может служить в качестве выходного образца сигнала широтно-импульсной модуляции, при этом множество импульсных режимов включает в себя синхронный импульсный режим, асинхронный импульсный режим и одноимпульсный режим, при этом упомянутый блок (60) управления импульсным режимом, выполненный с возможностью переключения между синхронным импульсным режимом и асинхронным импульсным режимом на основе количественного параметра, связанного с амплитудой выходного напряжения инвертора (2), и количественного параметра, основанного на числе, указывающем, сколько импульсов включено в полупериод основной синусоиды выходного напряжения инвертора (2), упомянутый блок (60) управления импульсным режимом, выполненный с возможностью переключения из асинхронного импульсного режима в синхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится равным или больше, чем первое заданное значение, или в ситуации, когда количественный параметр, основанный на числе, указывающем, сколько импульсов включено, становится меньше, чем второе заданное значение, и упомянутый блок (60) управления импульсным режимом, выполненный с возможностью переключения из синхронного импульсного режима в асинхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится меньше, чем первое заданное значение, а также когда количественный параметр, основанный на числе, указывающем сколько импульсов включено, становится равным или больше, чем второе заданное значение.
6. Устройство (100) управления электродвигателем по п.5, в котором количественный параметр, основанный на числе, указывающем, сколько импульсов включено, является самим числом, указывающим, сколько импульсов включено в полупериод основной синусоиды выходного напряжения инвертора (2), и второе заданное значение равно 8 или больше.
7. Устройство (100) управления электродвигателем, предназначенное для управления электродвигателем переменного тока путем вывода сигнала широтно-импульсной модуляции к переключающему элементу, включенному в инвертор (2), который подключен к источнику (1) питания постоянного тока и выполнен с возможностью выдачи переменного тока, имеющего произвольную частоту и произвольное напряжение, к электродвигателю переменного тока, содержащее: блок (60) управления импульсным режимом, выполненный с возможностью выборочного переключения между множеством импульсных режимов, каждый из которых может служить в качестве выходного образца сигнала широтно-импульсной модуляции, при этом множество импульсных режимов включает в себя синхронный импульсный режим, асинхронный импульсный режим и одноимпульсный режим, при этом упомянутый блок (60) управления импульсным режимом выполнен с возможностью переключения между синхронным импульсным режимом и асинхронным импульсным режимом на основе количественного параметра, связанного с амплитудой выходного напряжения инвертора (2), и крутящего момента или командного сигнала крутящего момента, который выдается электродвигателем переменного тока.
8. Устройство (100) управления электродвигателем по п.7, в котором блок (60) управления импульсным режимом выполнен с возможностью переключения из асинхронного импульсного режима в синхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится равным или больше, чем первое заданное значение, которое задается согласно крутящему моменту, который выдается электродвигателем переменного тока, при этом упомянутый блок (60) управления импульсным режимом выполнен с возможностью переключения из синхронного импульсного режима в асинхронный импульсный режим в ситуации, когда количественный параметр, связанный с амплитудой выходного напряжения инвертора (2), становится меньше, чем первое заданное значение, которое задается согласно крутящему моменту, который выдается электродвигателем переменного тока.
9. Устройство (100) управления электродвигателем по п.8, в котором первое заданное значение задается большего значения, когда крутящий момент, который выдается электродвигателем переменного тока, является большим, тогда как первое заданное значение задается меньшего значения, когда крутящий момент, который выдается электродвигателем переменного тока, является небольшим.
10. Устройство (100) управления электродвигателем по п.9, в котором первое заданное значение задается таким образом, что число, указывающее, сколько импульсов включено в полупериод основной синусоиды выходного напряжения инвертора, равно или больше, чем предварительно определенное значение.
11. Устройство (100) управления электродвигателем по п.10, в котором предварительно определенное значение равно 8.
12. Устройство (100) управления электродвигателем, предназначенное для управления электродвигателем переменного тока путем вывода сигнала широтно-импульсной модуляции к переключающему элементу, включенному в инвертор (2), который подключен к источнику (1) питания постоянного тока и выполнен с возможностью выдачи переменного тока, имеющего произвольную частоту и произвольное напряжение, к электродвигателю переменного тока, содержащее: блок (60) управления импульсным режимом, выполненный с возможностью выборочного переключения между множеством импульсных режимов, каждый из которых может служить в качестве выходного образца сигнала широтно-импульсной модуляции, при этом множество импульсных режимов включает в себя синхронный импульсный режим, асинхронный импульсный режим и одноимпульсный режим, при этом для останова инвертора (2) во время работы инвертора (2) в одноимпульсном режиме устройство (100) управления электродвигателем выполнено с возможностью выполнения этапов управления в следующем порядке: одноимпульсный режим, синхронный импульсный режим и процесс выключения инвертора.
13. Устройство (100) управления электродвигателем по п.12, в котором, для останова инвертора (2) во время работы инвертора (2) в синхронном импульсном режиме устройство (100) управления электродвигателем выполнено с возможностью выполнения этапов управления в следующем порядке: синхронный импульсный режим и процесс выключения инвертора.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2005 |
|
RU2289197C1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| US 2005046369 A1, 03.03.2005 | |||
| DE 4426764 A1, 01.02.1996 | |||
| JP 2006081287 A, 23.03.2006 | |||
| JP 2005137197 A, 26.05.2005 | |||
| EP 0229656 A2, 22.07.1987. | |||

