[0001] Данная заявка испрашивает приоритет по ранее поданной временной патентной заявке совместного рассмотрения U.S. Provisional Application Ser. No. 61/929,749, выложена 21 января 2014 г., полностью включена в данном документе в виде ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение относится к области горных машин. Конкретно, настоящее изобретение относится к системе выравнивания уровня текучей среды для самоходной горной машины.
[0003] Обычные очистные комбайны для длинного забоя включают в себя раму и пару врубовых узлов, установленных на каждом конце рамы. Каждый врубовый узел включает в себя режущий барабан для контактного взаимодействия со стеной выработки. Когда рама передвигается в поперечном направлении в пределах выработки, режущие барабаны срезают материал с забоя выработки. В некоторых вариантах осуществления материал укладывается на конвейер и транспортируется от забоя выработки. Пол выработки может быть неровным, и поэтому возможно наклонное положение рамы или ее установка на откосе при ее перемещении вперед и назад относительно забоя выработки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В одном аспекте горная машина включает в себя раму, первый бак текучей среды, второй бак текучей среды, клапан и систему управления. Рама включает в себя первый конец и второй конец, а также по меньшей мере один врубовый узел. Первый бак текучей среды закреплен на раме вблизи первого конца. Второй бак текучей среды закреплен на раме вблизи второго конца. Клапан перемещается между первым положением и вторым положением. Клапан обеспечивает сообщение текучей средой между первым баком текучей среды и вторым баком текучей среды, когда клапан находится в первом положении. Клапан предотвращает сообщение текучей средой между первым баком текучей среды и вторым баком текучей среды, когда клапан находится во втором положении. Система управления включает в себя первый датчик, второй датчик и контроллер. Первый датчик измеряет объем текучей среды в первом баке текучей среды, и второй датчик измеряет объем текучей среды во втором баке текучей среды. Контроллер перемещает клапан в первое положение, когда разность между объемом текучей среды в первом баке текучей среды и объемом текучей среды во втором баке текучей среды превышает заданный порог.
[0005] В другом варианте осуществления система выравнивания уровня текучей среды выравнивает объемы текучей среды по меньшей мере в двух баках текучей среды, закрепленных на самоходной горной машине. Система выравнивания уровня текучей среды включает в себя клапан, первый датчик, второй датчик, и контроллер. Клапан перемещается между первым положением и вторым положением. Клапан выполнен с возможностью обеспечивать сообщение текучей средой между баками текучей среды, когда клапан находится в первом положении, и клапан выполнен с возможностью предотвращать сообщение текучей средой между баками текучей среды, когда клапан находится во втором положении. Первый датчик выполнен с возможностью генерирования первого сигнала, указывающего объем текучей среды в первом баке текучей среды. Второй датчик выполнен с возможностью генерирования второго сигнала, указывающего объем текучей среды во втором баке текучей среды. Контроллер сравнивает первый сигнал и второй сигнал и вычисляет разность между объемом текучей среды в первом баке и объемом текучей среды во втором баке. Контроллер перемещает клапан в первое положение, когда разность превышает заданный порог.
[0006] В другом варианте осуществления способ выравнивания уровней текучей среды между первым баком и вторым баком, закрепленными на самоходной горной машине, включает в себя: создание клапана, перемещающегося между первым положением и вторым положением, при этом клапан обеспечивает сообщение текучей средой между первым баком и вторым баком, когда клапан находится в первом положении, и клапан предотвращает сообщение текучей средой между первым баком и вторым баком, когда клапан находится во втором положении; генерирование первого сигнала, указывающего объем текучей среды, содержащейся в первом баке; генерирование второго сигнала, указывающего объем текучей среды, содержащейся во втором баке; сравнение первого сигнала и второго сигнала для вычислeния разности между объемом текучей среды в первом баке и объемом текучей среды во втором баке; сравнение вычисленной разности с заданным порогом; и когда вычисленная разность превышает заданный порог, перемещение клапана в первое положение для обеспечения сообщения текучей средой между первым баком и вторым баком.
[0007] Другой аспекты изобретения станут понятными при рассмотрении подробного описания изобретения и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
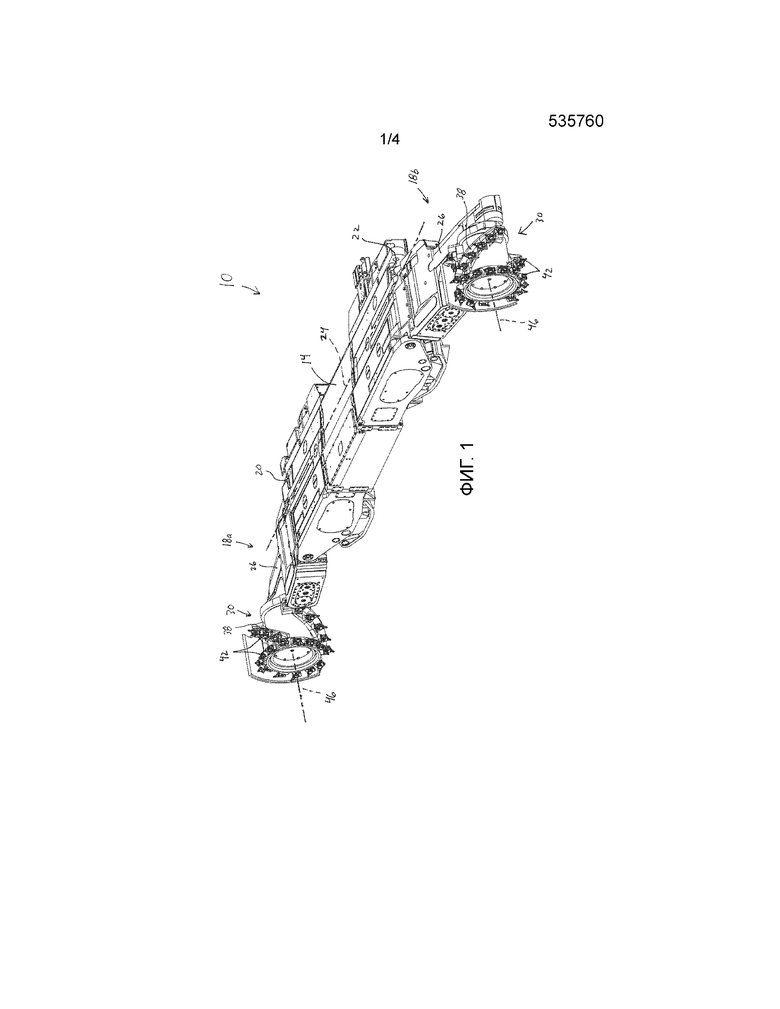
[0008] На фиг. 1 показана в изометрии горная машина.
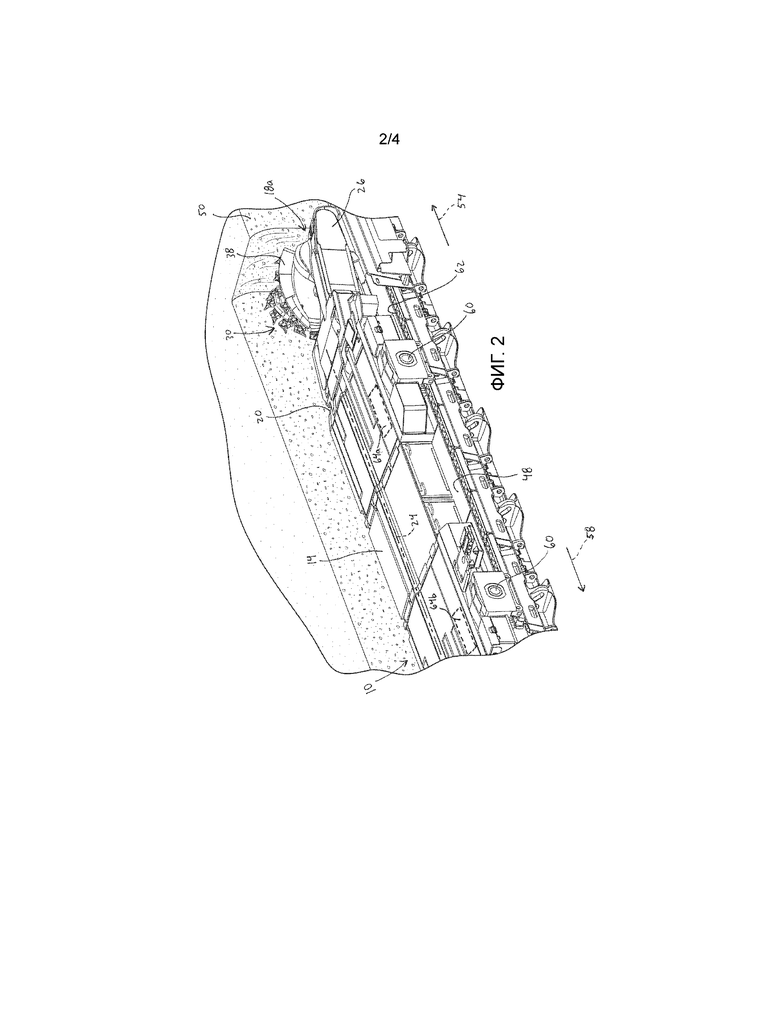
[0009] На фиг. 2 показаны вид сзади в изометрии части горной машины фиг. 1 и забой выработки.
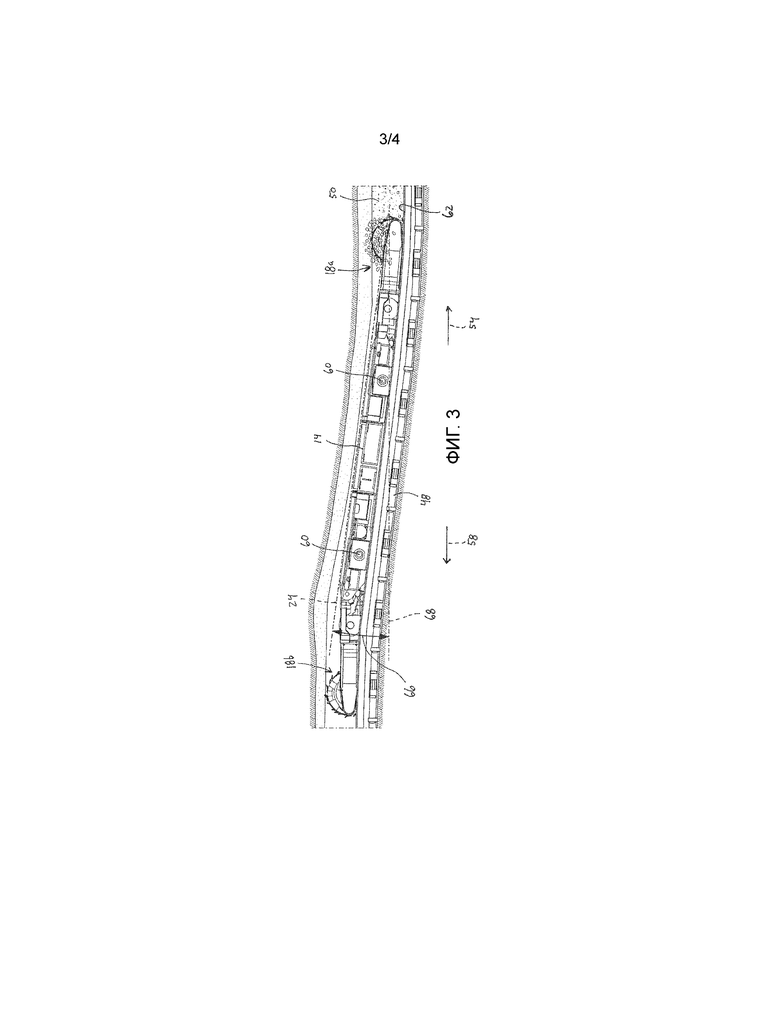
[0010] На фиг. 3 показан вид заднего конца горной машины фиг. 1 и забоя выработки.
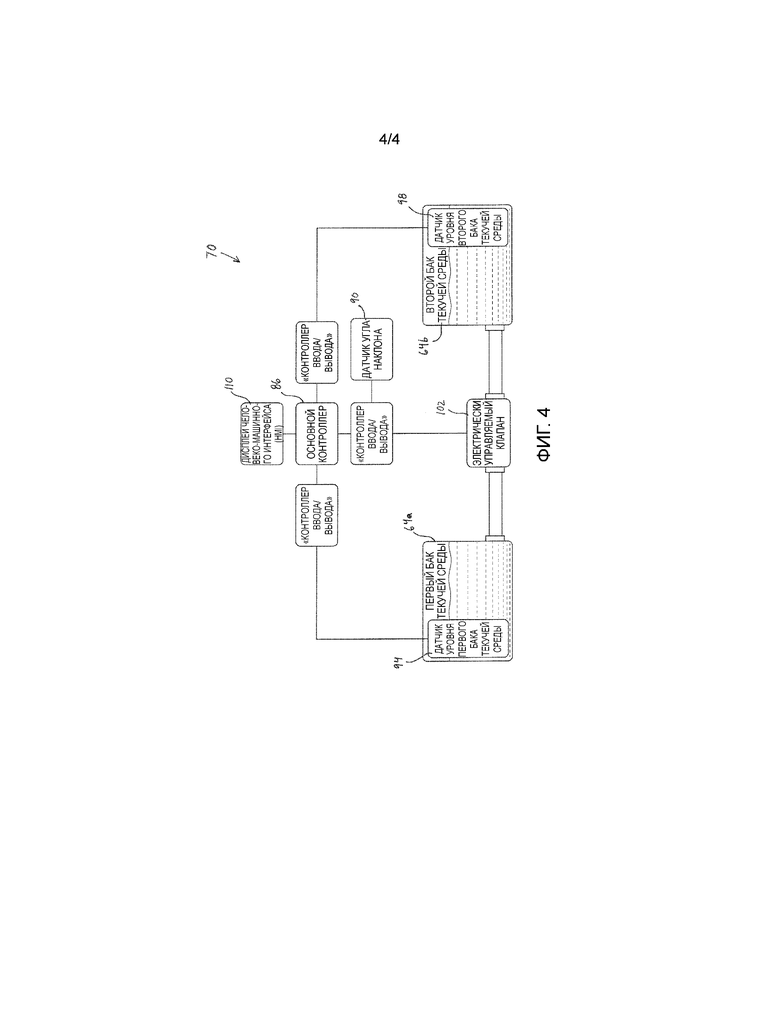
[0011] На фиг. 4 показана схема вид система выравнивания уровня текучей среды.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0012] Для подробного описания вариантов осуществления изобретения, следует понимать, что изобретение не ограничено в заявке деталями конфигурации и устройства компонентов, изложенными в следующем описании или проиллюстрированными на прилагаемых чертежах. Изобретение может иметь другие варианты осуществления и практически применяться или осуществляться различными способами. Также понятно, что фразеология и терминология, применяемая в данном документе, служит для описания и не должна считаться ограничивающей. Применение слов "включающий в себя", "содержащий" или "имеющий" и их вариаций в данном документе означает включение в состав позиций, перечисленных ниже в данном документе и их эквивалентов, а также дополнительных позиций. Если иное специально не оговорено или нет специального ограничения, термины "установлен", "соединен", "закреплен" и "соединен" и их вариации применяютcя в широком смысле и заключают в себе как прямое, так и непрямое установку, соединение, закрепление и сцепление.
[0013] В дополнение, следует понимать что варианты осуществления изобретения могут включать в себя агрегатное обеспечение, программное обеспечение, и электронные компоненты или модули, которые, для рассмотрения, можно показывать и описывать, как если большинство компонентов реализованы только в агрегатном обеспечении. Вместе с тем, специалисту в данной области техники по прочтении данного подробного описания изобретения, должно быть понятно, что по меньшей мере в одном варианте осуществления, связанные с электрoникой аспекты изобретения можно реализовать в программном обеспечении (например, сохраняемые в не транзиторном машиночитаемом носителе), с исполнением одним или несколькими блоками обработки данных, например микропроцессором и/или специализированными интегральными схемами ("Специализированными ИС"). Здесь следует отметить, что множество устройств агрегатного обеспечения и основанных на программном обеспечении, а также множество отличающихся конструктивных компонентов можно использовать для реализации изобретения. Например, "серверы" и "вычислительные устройства", раскрытые в описании, могут включать в себя один или несколько блоков обработки данных, один или несколько модулей для машиночитаемых носителей, один или несколько интерфейсов ввода/вывода и различные соединительные устройства (например, системную шину передачи данных) для компонентов.
[0014] На фиг. 1 показана горная машина, например очистной комбайн 10 для длинного забоя, включающий в себя шасси или раму 14 и пару врубовых узлов 18. Рама 14 включает в себя первый конец 20, второй конец 22 и ось 24 корпуса, проходящую между первым концом 20 и вторым концом 22. Первый врубовый узел 18a соединен с первым концом 20 рамы 14, и второй врубовый узел 18b соединен со вторым концом 22.
[0015] Каждый врубовый узел 18 включает в себя поворотный редуктор 26 и режущий барабан 30. Поворотный редуктор 26 соединен поворотным шарниром с рамой 14 и несет вращaющийся режущий барабан 30. Каждый барабан 30 соединен с концом поворотного редуктора 26 и выполнен вращaющимся вокруг оси 46 барабана, которая в общем перпендикулярна поворотному редуктору 26. Режущий барабан 30 включает в себя в общем цилиндрический корпус, имеющий лопасти 38 и режущие долота 42, установленные вдоль переднего конца барабана 30 и вдоль кромок лопастей 38. В показанном варианте осуществления лопасти 38 проходят по спиральной или геликоидальной траектории вдоль периферии корпуса барабана. В некоторых вариантах осуществления врубовый узел 18 может также включать в себя направляющие для отвода подрубленного материала в направлении к механизму перемещения материала, например, забойному конвейеру 48 (фиг. 3).
[0016] Как показано на фиг. 2 и 3, рама 14 выполнена с возможностью откатки или перемещения вдоль стены материала, подлежащего выемке, или забоя 50 выработки в первом направлении 54 и втором направлении 58. В показанном варианте осуществления рама 14 включает в себя узел 60 ведущей звездочки, которая находится в зацеплении с зубчатой рейкой 62, образуя зубчато-реечную передачу. Зубчатая рейка 62 соединена с забойным конвейером 48 и продвигается в направлении к забою 50 выработки, когда рама 14 завершает заданное число проходов вдоль очистного забоя 50. Вращение узла 60 ведущей звездочки перемещает раму 14 вдоль зубчатой рейки 62.
[0017] Как показано на фиг. 2, каждый барабан 30 выполнен с возможностью контактного взаимодействия с забоем 50 выработки так, что долота 42 подрубают материал на очистном забое 50. Когда режущий барабан 30 вращается, лопасти 38 перемещают подрубленный материал от очистного забоя 50 в направлении к заднему концу барабана 30, где подрубленный материал укладывается на забойный конвейер 48 под рамой 14. Когда рама 14 перемещается в первом направлении 54, первый врубовый узел 18a располагается в переднем положении, и второй врубовый узел 18b (фиг. 3) располагается в заднем положении. В одном варианте осуществления первый врубовый узел 18a поднимается для подрубания материала, например угля с верхнего участка забоя 50 выработки, а второй врубовый узел 18b располагается в нижнем положении для подрубания материала из нижнего участка забоя 50 выработки.
[0018] В одном варианте осуществления каждый врубовый узел 18 имеет гидравлический привод, и рама 14 несет пару баков 64 текучей среды (фиг. 2) для обеспечения подачи текучей среды под давлением для привода врубовых узлов 18. В показанном варианте осуществления первый бак 64a текучей среды установлен вблизи первого конца 20 рамы 14, и второй бак 64b текучей среды установлен вблизи второго конца 22 рамы 14. В некоторых выработках забой 50 выработки имеет поперечный наклон. В результате, когда рама 14 перемещается от одной стороны забоя 50 выработки к другой, раму 14 можно ориентировать наклонно так, что ось 24 корпуса рамы 14 образует поперечный угол 66 относительно горизонтальной плоскости 68 во время по меньшей мере части перемещения.
[0019] На фиг. 4 показана система управления 70 для выравнивания уровней текучей среды между первым баком 64a и вторым баком 64b. Система 70 включает в себя основной контроллер 86, датчик 90 угла наклона рамы, первый датчик 94, второй датчик 98 и клапан 102, сообщающийся текучей средой с первым баком 64a и вторым баком 64b. В показанном варианте осуществления клапан 102 является электрически управляемым клапаном (например, электромагнитный клапан). В других вариантах осуществления могут применятьcя клапаны других типов.
[0020] Датчик 90 угла наклона рамы измеряет угол бокового наклона рамы 14, или угол 66 (фиг. 3) оси 24 корпуса рамы 14 относительно горизонтальной плоскости 68 (фиг. 3). Датчик 90 угла наклона рамы генерирует сигнал, представляющий измеренный угол 66 рамы, и передает сигнал на основной контроллер 86. Первый датчик 94 измеряет объем текучей среды в первом баке 64a, и второй датчик 98 измеряет объем текучей среды во втором баке 64b. В одном варианте осуществления датчики 94, 98 являются аналоговыми датчиками уровня текучей среды. Датчики 94, 98 могут измерять уровень текучей среды, содержащейся в каждом баке 64a, 64b текучей среды. Каждый датчик 94, 98 генерирует сигнал, представляющий измеренный объем текучей среды в своем соответствующем баке 64a, 64b и передает сигнал на основной контроллер 86. В некоторых вариантах осуществления каждый сигнал из датчиков 94, 98 представляет долю или процент заполнения соответствующего бака 64a, 64b текучей средой. Основной контроллер 86 сравнивает сигналы, генерируемые каждым датчиком 94, 98.
[0021] В одном варианте осуществления, когда измеренный объем текучей среды в любом из баков 64a, 64b становится ниже заданного уровня, основной контроллер 86 генерирует тревожный сигнал и отключает насос текучей среды (не показано), управляющий врубовым узлом 18a, 18b, связанным с баком 64a, 64b с низким уровнем. В некоторых вариантах осуществления заданный уровень определяет или устанавливает пользователь в зависимости от различных факторов. Контроллер 86 подтверждает, что угол 66, измеренный датчиком 90 угла наклона рамы, находится в приемлемом диапазоне и, если так, на экране дисплея 110 человеко-машинного интерфейса (HMI) (фиг. 4) оператору машины предлагается включить функцию "выравнивание уровня в баках". Если угол 66 наклона рамы находится вне разрешенного диапазона, основной контроллер 86 не разрешает открытие клапана 102. В одном варианте осуществления разрешенный диапазон для угла 66 наклона рамы меньше или равен 20 градусам относительно горизонтальной плоскости. Вследствие различных факторов разрешенный диапазон угла 66 наклона рамы может не быть симметричным относительно горизонтальной плоскости; то есть отрицательный предел может отличаться от положительного предела разрешенного диапазона. В некоторых вариантах осуществления, основной контроллер 86 включает в себя сравнивающее устройство для сравнения разности между объемами текучей среды в каждом баке 64 текучей среды 64, и основной контроллер 86 генерирует тревожный сигнал, если разность превышает заданный порог. В некоторых вариантах осуществления основной контроллер 86 автоматически приводит в действие клапан 102, когда разность превышает заданный порог и угол 66 наклона рамы находится в разрешенном диапазоне.
[0022] Если угол 66, измеренный датчиком 90 угла наклона рамы, находится в приемлемом диапазоне, основной контроллер 86 перемещает клапан 102 в открытое положение для обеспечения прохождения потока текучей среды между баками 64a, 64b. Клапан 102 остается открытым до получения уровней текучей среды, измеренных каждым датчиком 94, 98, которые, по существу, равны друг другу (т.e., разность между уровнем текучей среды первого бака 64a и уровнем текучей среды второй бака 64b меньше заданной величины). Когда данное условие удовлетворено, основной контроллер 86 отключает питание клапана 102, переключая его в закрытое положение, для предотвращения прохождения потока между баками 64a, 64b.
[0023] Во время горных работ текучая среда может закончиться в одном из баков 64a, 64b, когда машина 10 установлена в труднодоступном положении и далеко от источника подачи текучей среды (например, на дальнем краю забоя 50 выработки). Обычная горная машина, в данном случае требует от оператора перемещения канистр текучей среды к машине и пополнения опустевшего бака, что затратно по времени и трудоемко. Система управления 70 обеспечивает подачу текучей среды из одного бака в другой в случае, если уровень текучей среды в одном баке становится низким, при этом перекачка текучей среды из полного (или частично заполненного) бака в пустой бак или бак с низким уровнем не требует от оператора заполнения вручную бака с низким уровнем до требуемого уровня.
[0024] Выравнивание уровня в баках 64 обеспечивает машине 10 продолжение работы по меньшей мере до установки машины 10 на площади горной выработке, где обслуживание машины 10 удобно выполнять (например, вблизи источника подачи текучей среды для пополнения баков 64). В дополнение, в эксплуатационной ситуации, когда один или оба бака 64 имеют низкий уровень текучей среды, оператор может заполнить один из баков 64 и использовать последовательность выравнивания уровня текучей среды для перекачки текучей среды в другой бак. С помощью заполнения только одного из баков 64, оператор уменьшает время техобслуживания и уменьшает возможность попадания отходов в окружающей среде выработки и вокруг отверстия бака (не показано) в отверстие и загрязнения текучей среды. Кроме того, с помощью измерения бокового поперечного угла 66 рамы 14 машины, система управления 70 предотвращает открытие клапана 102, когда машина 10 установлена на наклонном участке (фиг. 3,) что замедляет прохождение потока текучей среды между баками 64 или делает трудным заполнение баков 64 с одинаковым уровнем.
[0025] Таким образом, изобретение предлагает, среди прочего, систему выравнивания уровня текучей среды в баках для самоходной горной машины. Хотя изобретение описано подробно со ссылкой на некоторые предпочтительные варианты осуществления, существуют вариации и модификации в объеме и сущность одного или нескольких независимых аспектов описанного изобретения
Группа изобретений относится к системе способу выравнивания уровня текучей среды для горной самоходной машины. Горная машина включает в себя раму, первый бак текучей среды, второй бак текучей среды, клапан и систему управления. Первый бак текучей среды закреплен на раме вблизи первого конца, и второй бак текучей среды закреплен на раме вблизи второго конца. Клапан обеспечивает сообщение текучей средой между первым и вторым баком текучей среды, когда клапан находится в первом положении, и предотвращает сообщение текучей средой между первым и вторым баком текучей среды, когда клапан находится во втором положении. Система управления включает в себя первый датчик, измеряющий объем текучей среды в первом баке, второй датчик, измеряющий объем текучей среды во втором баке, а также контроллер. Контроллер перемещает клапан в первое положение, когда разность между объемом текучей среды в первом и втором баках превышает заданный порог. 3 н. и 15 з.п. ф-лы, 4 ил.
1. Горная машина, содержащая: раму, включающую в себя первый конец и второй конец и по меньшей мере один врубовый узел;
первый бак текучей среды, закрепленный на раме вблизи первого конца;
второй бак текучей среды, закрепленный на раме вблизи второго конца;
клапан, перемещающийся между первым положением и вторым положением, причем клапан обеспечивает сообщение текучей средой между первым баком текучей среды и вторым баком текучей среды, когда клапан находится в первом положении, клапан предотвращает сообщение текучей средой между первым баком текучей среды и вторым баком текучей среды, когда клапан находится во втором положении; и
систему управления, включающую в себя первый датчик, второй датчик и контроллер, причем первый датчик измеряет объем текучей среды в первом баке текучей среды, второй датчик измеряет объем текучей среды во втором баке текучей среды, контроллер перемещает клапан в первое положение, когда разность между объемом текучей среды в первом баке текучей среды и объемом текучей среды во втором баке текучей среды превышает заданный порог.
2. Горная машина по п. 1, в которой первый датчик обнаруживает уровень текучей среды в первом баке текучей среды, и второй датчик обнаруживает уровень текучей среды во втором баке текучей среды.
3. Горная машина по п. 1, в которой рама образует ось рамы, проходящую между первым концом и вторым концом, и при этом система управления дополнительно содержит датчик угла наклона рамы, измеряющий угол наклона рамы, образованный между осью рамы и горизонтальной плоскостью.
4. Горная машина по п. 3, в которой контроллер выполнен с возможностью перемещения клапана в первое положение только если измеренный угол наклона рамы находится в заданном диапазоне.
5. Горная машина по п. 4, в которой заданный диапазон включает значения от нуля градусов до двадцати градусов относительно горизонтальной плоскости.
6. Горная машина по п. 1, в которой рама дополнительно включает в себя первый врубовый узел, соединенный с первым концом, и второй врубовый узел, соединенный со вторым концом, при этом рама перемещается в направлении, по существу, параллельном забою выработки.
7. Горная машина по п. 1, в которой рама включает в себя ведущую звездочку, находящуюся в зацеплении с зубчатой рейкой, при этом вращение звездочки перемещает раму вдоль зубчатой рейки.
8. Горная машина по п. 1, в которой, когда разность между объемом текучей среды в первом баке и объемом текучей среды во втором баке превышает заданный порог, контроллер генерирует тревожный сигнал для пользователя, при этом пользователь должен разрешить контроллеру переместить клапан до перемещения клапана в первое положение контроллером.
9. Система выравнивания уровня текучей среды для выравнивания объема текучей среды по меньшей мере в двух баках текучей среды, закрепленных на самоходной горной машине, содержащая:
клапан, перемещающийся между первым положением и вторым положением, причем клапан выполнен с возможностью обеспечивать сообщение текучей средой между баками текучей среды, когда клапан находится в первом положении, клапан выполнен с возможностью предотвращать сообщение текучей средой между баками текучей среды, когда клапан находится во втором положении;
первый датчик, выполненный с возможностью генерирования первого сигнала, указывающего объем текучей среды в первом баке текучей среды;
второй датчик, выполненный с возможностью генерирования второго сигнала, указывающего объем текучей среды во втором баке текучей среды;
контроллер, сравнивающий первый сигнал и второй сигнал и вычисляющий разность между объемом текучей среды в первом баке и объемом текучей среды во втором баке, контроллер перемещает клапан в первое положение, когда разность превышает заданный порог.
10. Система выравнивания уровня текучей среды по п. 9, в которой первый датчик является датчиком уровня текучей среды, и второй датчик является датчиком уровня текучей среды.
11. Система выравнивания уровня текучей среды по п. 9, дополнительно содержащая датчик угла наклона рамы, выполненный с возможностью генерирования сигнала, указывающего угол бокового наклона рамы горной машины относительно горизонтальной плоскости.
12. Система выравнивания уровня текучей среды по п. 11, в которой контроллер выполнен с возможностью перемещения клапана в первое положение только если измеренный угол бокового наклона находится в заданном диапазоне.
13. Система выравнивания уровня текучей среды по п. 9, в которой контроллер генерирует тревожный сигнал для пользователя, по которому пользователь должен разрешить контроллеру перемещение клапана в первое положение.
14. Способ выравнивания уровней текучей среды между первым баком и вторым баком, первый бак и второй бак закреплены на самоходной горной машине, в котором обеспечивают:
создание клапана, перемещающегося между первым положением и вторым положением так, что клапан обеспечивает сообщение текучей средой между первым баком и вторым баком, когда клапан находится в первом положении, и клапан предотвращает сообщение текучей средой между первым баком и вторым баком, когда клапан находится во втором положении;
генерирование первого сигнала, указывающего объем текучей среды, содержащейся в первом баке;
генерирование второго сигнала, указывающего объем текучей среды, содержащейся во втором баке;
сравнение первого сигнала и второго сигнала для вычислeния разности между объемом текучей среды в первом баке и объемом текучей среды во втором баке;
сравнение вычисленной разности с заданным порогом; и
когда вычисленная разность превышает заданный порог, перемещение клапана в первое положение для обеспечения сообщения текучей средой между первым баком и вторым баком.
15. Способ по п. 14, в котором генерирование первого сигнала, указывающего объем текучей среды, включает в себя измерение уровня текучей среды, содержащейся в первом баке, и при этом генерирование второго сигнала, указывающего объем текучей среды, включает в себя измерение уровня текучей среды, содержащейся во втором баке.
16. Способ по п. 14, в котором дополнительно генерируют третий сигнал, указывающий угол наклона рамы самоходной горной машины относительно горизонтальной плоскости.
17. Способ по п. 16, в котором дополнительно, до перемещения клапана в первое положение, осуществляют сравнение третьего сигнала с заданным диапазоном углов наклона рамы и в котором перемещение клапана в первое положение обеспечивается, если измеренный угол наклона рамы находится в заданном диапазоне.
18. Способ по п. 14, в котором дополнительно, до перемещения клапана в первое положение, обеспечивают запрос разрешения пользователя контроллеру для перемещения клапана в первое положение.
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| RU 2001119469 A, 27.06.2003 | |||
| RU 2011128301 A, 20.01.2013 | |||
| RU 2012132477 A, 27.01.2014 | |||
| US 6494226 B2, 17.12.2002 | |||
| US 3861749 A1, 21.01.1975 | |||
| US 5960809 A1, 05.10.1999 | |||
| US 5518299 A, 21.05.1996. | |||

