РОДСТВЕННАЯ ЗАЯВКА
[0001] Настоящая заявка связана с совместно поданной заявкой на патент США № 15/080,344 (номер патентного реестра 051077-9631-US00), полное содержание которой включено сюда путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к способам и системам для определения перемещения конвейерной системы, используемой в условиях подземной шахтной разработки месторождений.
УРОВЕНЬ ТЕХНИКИ
[0003] Системы разработки длинными забоями (longwall mining systems, далее - системы длиннозабойной разработки) используются для разработки массива угля или другой руды, называемого сплошным массивом. Сплошной массив включает в себя угольный забой (или рудный забой), из которого удаляется уголь (или руда). Две горные выработки, основной штрек и хвостовой штрек, идут вдоль сторон сплошного массива и перпендикуляры к угольному забою. Система длиннозабойной разработки включает в себя механизированные опоры крыши для поддержки крыши и перекрытия скальной породы над системой длиннозабойной разработки. Длиннозабойная (ʺлонгволлʺ) врубовая машина движется вдоль угольного забоя сплошного массива, срезая уголь с угольного забоя на забойный скребковый конвейер (AFC). Забойный скребковый конвейер продолжается вдоль угольного забоя и транспортирует уголь по направлению к основному штреку. Когда уголь доставляется в основной штрек, консольный перегружатель, подсоединенный к забойному скребковому конвейеру, переправляет уголь от забойного скребкового конвейера, поворачивая его на 90°, на ленточный транспортер, расположенный вдоль основного штрека. После того как длиннозабойная врубовая машина срезает слой угольного забоя, система длиннозабойной разработки перемещается вперед, чтобы срезать следующий слой.
[0004] Когда система длиннозабойной разработки находится в работе, обычным для полной структуры является такое смещение или сползание, что расстояние между консольным перегружателем и стенками основного штрека уменьшается. Это смещение или сползание длиннозабойного оборудования может вызвать затруднение при получении доступа персонала к длинному забою. Кроме того, такое смещение или сползание может также привести в результате к возникновению трения между длиннозабойным оборудованием и оборудованием основного штрека и стенками основного штрека, вызывающего повреждение длиннозабойного оборудования.
СУЩНОСТЬ ИЗОРЕТЕНИЯ
[0005] В одном варианте осуществления изобретение обеспечивает систему для обнаружения сползания по забою системы длиннозабойной разработки. Система включает в себя устройство обнаружении, установленное в основном штреке, и первое индикаторное устройство, установленное на конвейере системы длиннозабойной разработки, для указания положения границы контакта между забойным скребковый конвейером и-консольным перегружателем устройству обнаружения. Система дополнительно включает в себя контроллер, подсоединенный к устройству обнаружения и выполненный с возможностью приема положения границе контакта между забойным скребковым конвейером и -консольным перегружателем и определения первого смещения положения границе контакта между забойным скребковым конвейером и-консольным перегружателем относительно центральной линии основного штрека.
[0006] В одном варианте осуществления изобретение обеспечивает систему для обнаружения сползания по забою системы длиннозабойной разработки. Система включает в себя устройство обнаружении, установленное в основном штреке, и первое индикаторное устройство, расположенное на границе контакта между консольным перегружателем изабойным скребковым конвейером, для указания положения границы контакта между консольным перегружателем-забойным скребковым конвейером устройству обнаружения. Система дополнительно включает в себя контроллер, включающий в себя электронный процессор и память, который подсоединен к устройству обнаружения. Контроллер выполнен с возможностью определения положения границе контакта между консольным перегружателем изабойным скребковым конвейером, основываясь на сигнале от первого индикаторного устройства, и определения первого расстояния между положением границе контакта между консольным перегружателем и забойным скребковым конвейером и линией основного штрека. Контроллер затем генерирует указание о сползании по забою, основываясь на первом расстоянии.
[0007] В другом варианте осуществления изобретение обеспечивает способ для обнаружения сползания по забою системы длиннозабойной разработки. Способ включает в себя обнаружение устройством обнаружения положения границе контакта между консольным перегружателем и-забойным скребковым конвейером. Способ дополнительно включает в себя определение контроллером, подсоединенным к устройству обнаружения, положения границы контакта между консольным перегружателем и -забойным скребковым конвейером, основываясь на выходном сигнале устройства обнаружения, и определение контроллером первого расстояния между положением границы контакта между консольным перегружателем и-забойным скребковым конвейером и линией основного штрека. Способ также включает в себя генерацию контроллером указания о сползании по забою, основанную на первом расстоянии.
[0008] В другом варианте осуществления изобретение обеспечивает контроллер для обнаружения сползания по забою системы длиннозабойной разработки. Контроллер включает в себя электронный процессор и подлежащую исполнению команду, хранимую в памяти, выполненную с возможностью обнаружения сползания по забою. Контроллер выполнен с возможностью определения положения границы контакта между консольным перегружателем и -забойным скребковым конвейером, определения положения линии основного штрека и определения положения ленточного транспортера. Контроллер дополнительно выполнен с возможностью определения первого расстояния между положением границы контакта между консольным перегружателем и забойным скребковым конвейером и линией основного штрека и определения второго расстояния между……… описано более подробно ниже со ссылками на фиг. 6 и 7. Контроллер затем генерирует указание о сползании по забою, основываясь на первом расстоянии и на втором расстоянии.
[0009] Прежде чем перейти к подробному пояснению любых вариантов осуществления изобретения, следует понять, что изобретение не ограничивается в его заявке деталями конфигурации и построения компонентов, излагаемыми в последующем описании или представленными на сопроводительных чертежах. Изобретение способно к другим вариантам осуществления и к практической реализации или к выполнению различными путями. Кроме того, следует понимать, что формулировки и терминология, используемые здесь, служат для целей описания и не должны восприниматься как ограничивающие. Использование слов ʺвключает в себяʺ, ʺсодержитʺ или ʺимеетʺ и их вариаций означает охватывание пунктов, перечисленных ниже, и их эквивалентов, а также дополнительных пунктов. Если не оговорено или не ограничено иное, то термины ʺустановленʺ, ʺподсоединенʺ, ʺподдерживаетсяʺ и ʺсвязанʺ и их вариации используются широко и охватывают прямо или косвенно установки, соединения, поддержки и связи.
[0010] Кроме того, следует понимать, что варианты осуществления изобретения могут включать в себя аппаратные средства, программное обеспечение и электронные компоненты или модули, которые, в целях обсуждения, могут быть представлены и описаны, как если бы большинство компонентов было реализовано исключительно в аппаратном обеспечении. Однако специалисты в данной области техники, основываясь на прочтении этого подробного описания, поймут, что по меньшей мере в одном варианте осуществления основанные на электронике аспекты изобретения могут быть реализованы в программном обеспечении (например, хранимом в энергонезависимом машиночитаемом носителе информации), выполняемом одним или более электронными процессорами, такими как микропроцессор и/или специализированные заказные интегральные схемы (ASIG). В связи с этим должно быть понятно, что множество аппаратных средств и устройств, основанных на программном обеспечении, как и множество разных структурных компонентов, может быть использовано для осуществления изобретения. Например, ʺсерверыʺ и ʺвычислительные устройстваʺ, описанные в спецификации, могут включать в себя один или более электронных процессоров, модулей машиночитаемых носителей информации, один или более интерфейсов ввода-вывода и различные соединения (например, системную шину), соединяющие компоненты.
[0011] Другие аспекты изобретения станут очевидными из рассмотрения подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
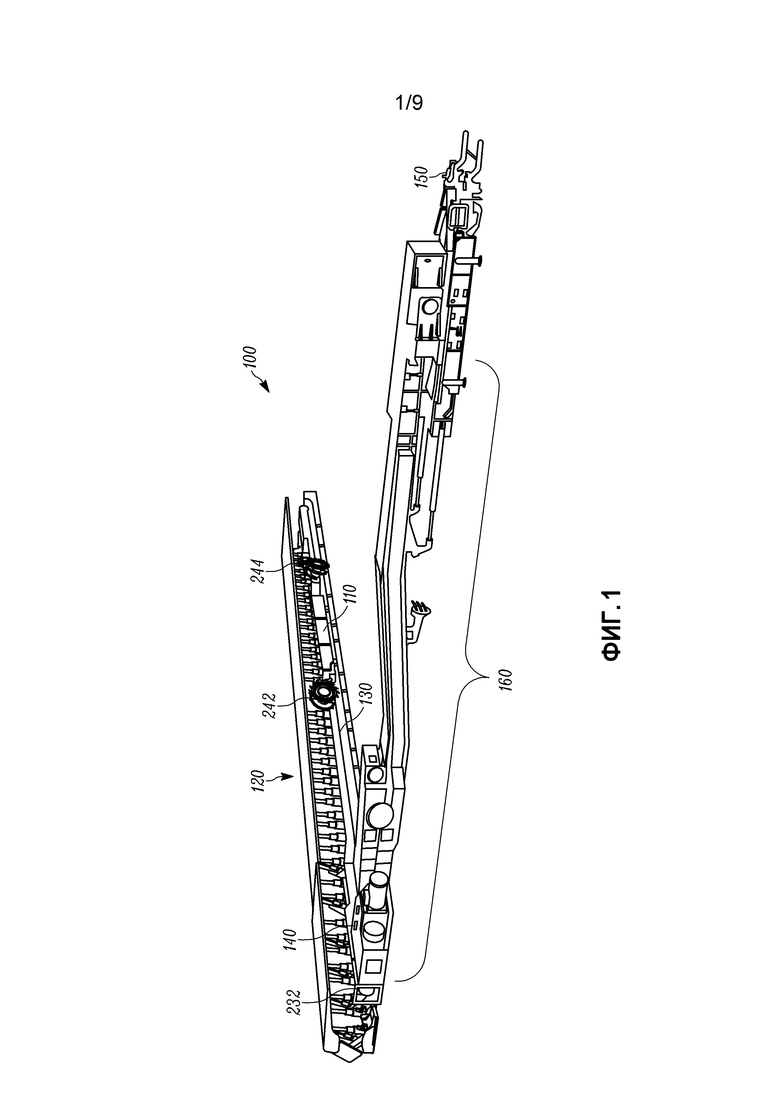
[0012] ФИГ. 1 - вид в перспективе системы длиннозабойной разработки согласно одному варианту осуществления изобретения.
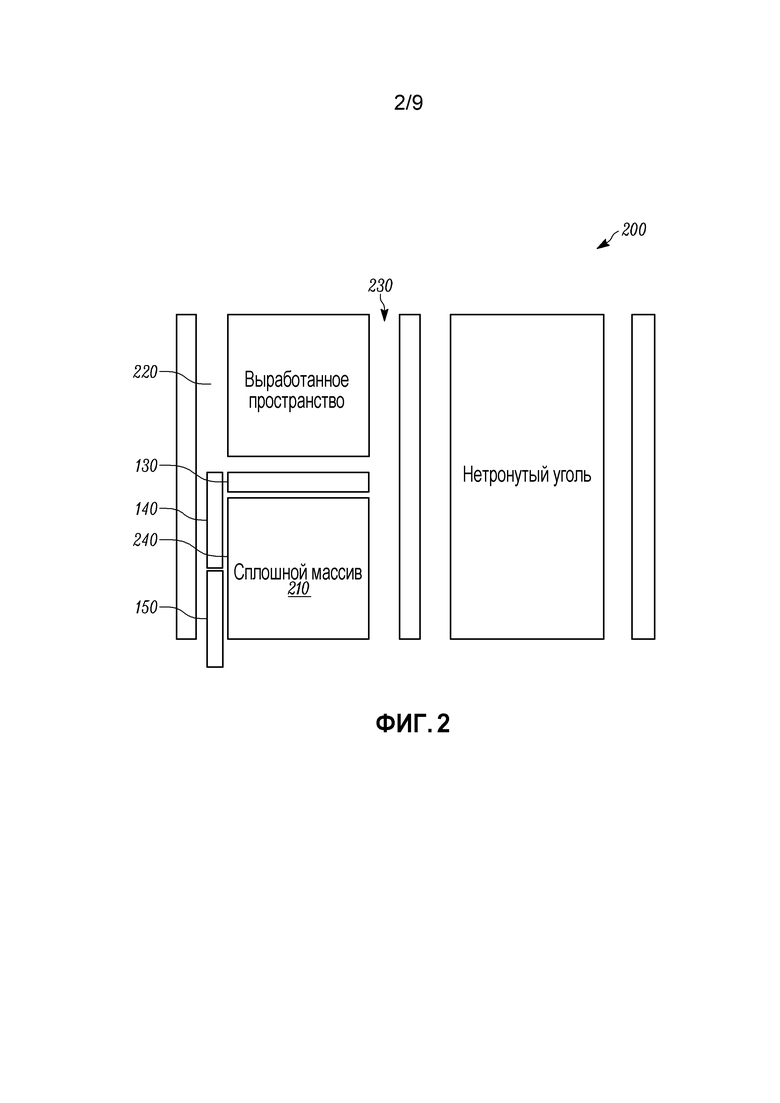
[0013] ФИГ. 2 - пример подземного рудника, в котором может работать система длиннозабойной разработки, изображенная на фиг. 1.
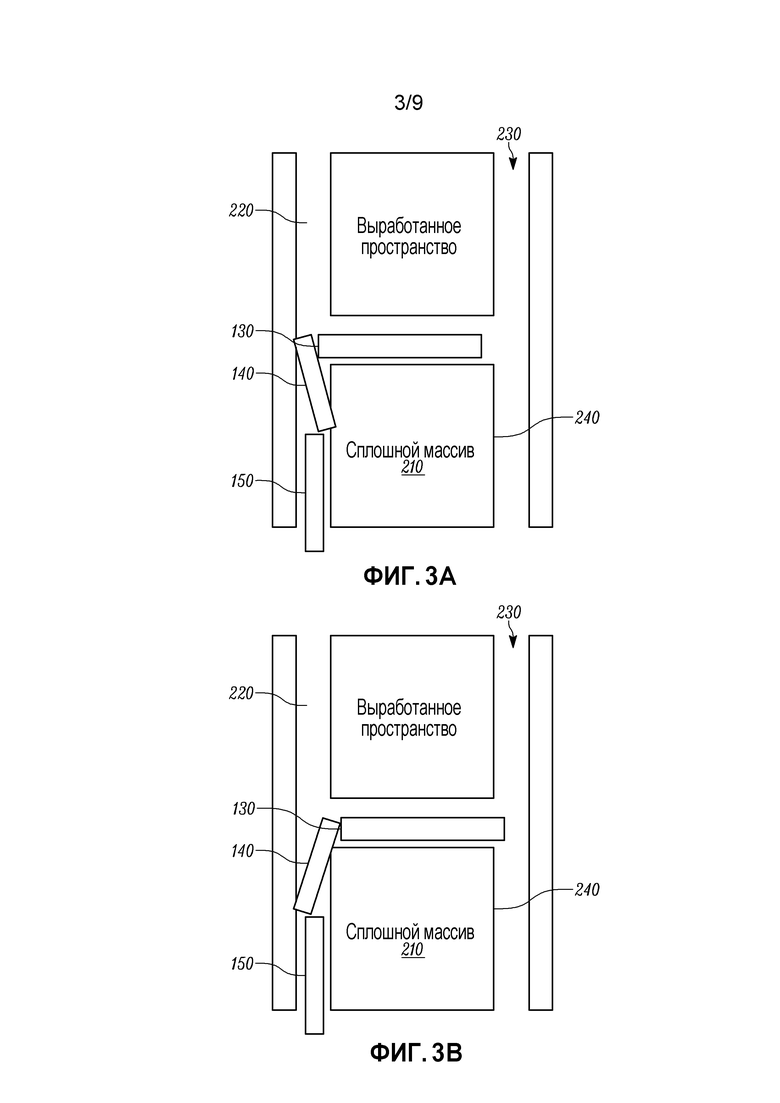
[0014] ФИГ. 3A и 3B - представление сползания по забою системы длиннозабойной разработки.
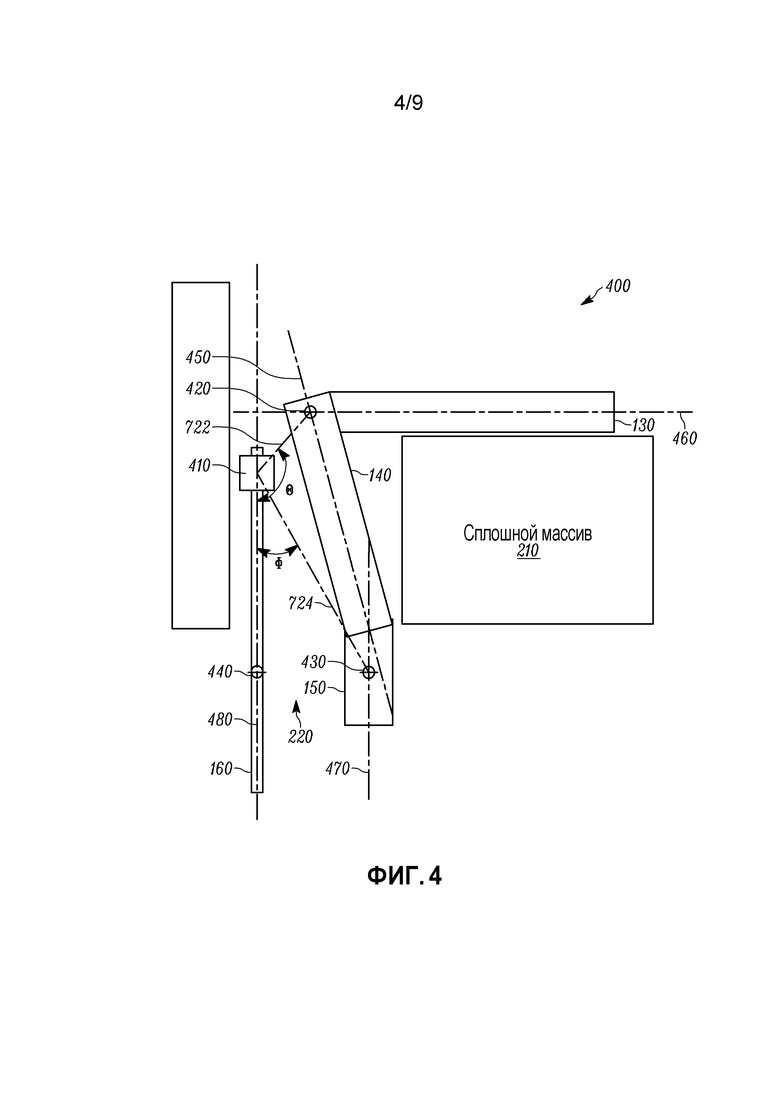
[0015] ФИГ. 4 - представление системы обнаружения, используемой с системой длиннозабойной разработки, изображенной на фиг. 1, согласно одному варианту осуществления изобретения.
[0016] ФИГ. 5 - представление системы управления для системы длиннозабойной разработки, изображенной на фиг. 1, согласно одному варианту осуществления изобретения.
[0017] ФИГ. 6A - представление процесса для обнаружения сползания по забою системы длиннозабойной разработки, изображенной на фиг. 1, согласно одному варианту осуществления изобретения.
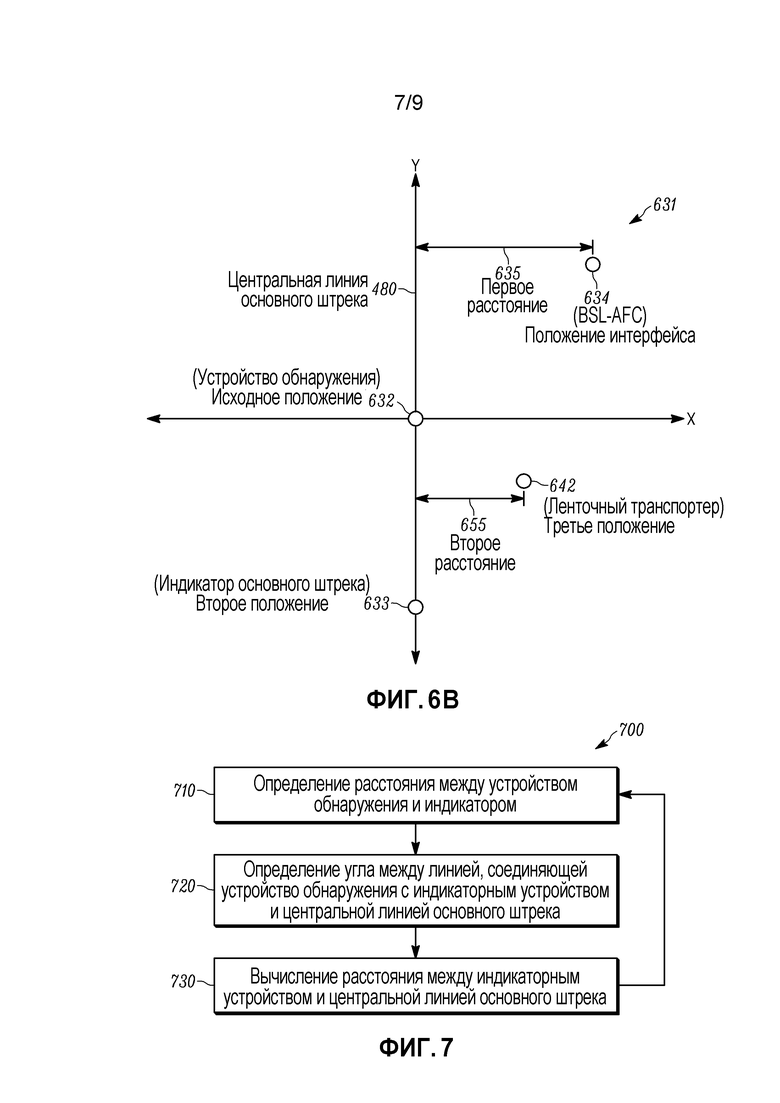
[0018] ФИГ. 6B - графическое представление различных положений и расстояний, определенных в процессе на фиг. 6A.
[0019] ФИГ. 7 - представление процесса для вычисления расстояния между разрабатывающим компонентом системы длиннозабойной разработки, изображенной на фиг. 1, и монорельсом или центральной линией основного штрека, согласно варианту осуществления изобретения.
[0020] ФИГ. 8 - представление процесса для управления системой длиннозабойной разработки, изображенной на фиг. 1, согласно одному варианту осуществления изобретения.
[0021] ФИГ. 9A и 9B - представление расположения оборудования для длиннозабойной разработки с целью коррекции сползания по забою системы длиннозабойной разработки, изображенной на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ
[0022] В последующем описании многочисленные специфические детали излагаются для обеспечения четкого понимания настоящего изобретения. Однако специалистам в данной области техники будет понятно, что настоящее изобретение может быть осуществлено на практике без одной или более этих специфических деталей. В других случаях хорошо известные признаки не описываются, чтобы исключить затруднение понимания настоящего изобретения.
[0023] На фиг. 1 показана система 100 длиннозабойной разработки. В представленном примере система 100 длиннозабойной разработки включает в себя, не ограничиваясь этим, длиннозабойную врубовую машину 110, механизированные опоры 120 крыши, забойный скребковый конвейер 130, консольный перегружатель 140, ленточный транспортер 150 и монорельсовую систему 160. Система 100 длиннозабойной разработки используется для разработки массива руды (например, угля), называемого сплошным массивом подземного рудника, такого как подземный рудник 200, изображенный на фиг.2. Как показано, подземный рудник 200 включает в себя сплошной массив 210, основной штрек 220 и хвостовой штрек 230. Сплошной массив 210 включает в себя рудный забой 240, из которого добывается руда. Две горные выработки, основной штрек 220 и хвостовой штрек 230, идут вдоль сторон сплошного массива и перпендикулярны к рудному забою 240.
[0024] Как показано на фиг. 1, длиннозабойная врубовая машина 110 срезает руду с рудного забоя 240 сплошного массива 210. Длиннозабойная врубовая машина 110 расположена над забойным скребковым конвейером 130 и срезает руду, когда движется вдоль длины рудного забоя 240. В некоторых вариантах осуществления длиннозабойная врубовая машина 110 может устанавливаться на забойный скребковый конвейер 130. Длиннозабойная врубовая машина 110 может включать в себя один или более режущих барабанов 242 и 244. Режущие барабаны 242 и 244 переплетены режущими зубками и вращаются в плоскости, параллельной рудному забою 240. Когда они надавливаются в рудный забой и вращаются, режущие барабаны 242 и 244 срезают руду с рудного забоя 240.
[0025] Когда руда срезается с рудного забоя 240, руда падает на забойный скребковый конвейер 130, который переносит руду к сопряженному с основным штреком концу 232 забойного скребкового конвейера 130 в основном штреке 220. Забойный скребковый конвейер 130 продолжается вдоль длины рудного забоя 240 от хвостового штрека 230 к основному штреку 220. Забойный скребковый конвейер 130 может включать в себя ряд стальных поддонов, способных, изгибаясь, перемещаться по отношению друг к другу. В некоторых вариантах осуществления руда переносится стальными полосами забойного скребкового конвейера 130, расположенными под углом 90 градусов по отношению к длине забойного скребкового конвейера 130 и приводимыми в движение парой циркулярных цепей.
[0026] На сопряженном с главным штреком конце 232 забойного скребкового конвейера 130 руда передается на консольный перегружатель 140. Консольный перегружатель 140 располагается вдоль основного штрека 220, продолжаясь вдоль ребра или стенки сплошного массива 220 от сопряженного с главным штреком конца 232 забойного скребкового конвейера 130 к ленточному транспортеру 150. В некоторых вариантах осуществления консольный перегружатель 140 имеет гибкий участок, примыкающий к забойному скребковому конвейеру 130, для того чтобы передавать руду, с поворотом на 90 градусов, на сопряженном с основным штреком конце 232 забойного скребкового конвейера 130. В определенных вариантах осуществления консольный перегружатель 140 может иметь изменение профиля вдоль его длины, для того чтобы сбрасывать руду на ленточный транспортер 150. В некоторых вариантах осуществления консольный перегружатель 140 может также включать в себя дробилку ил измельчитель, для того чтобы предотвратить повреждение и улучшить погрузку на ленточный транспортер 150. В некоторых вариантах осуществления, подобных забойному скребковому конвейеру 130, руда перемещается стальными полосами консольного перегружателя 140, расположенными под углом 90 градусов по отношению к длине консольного перегружателя 140 и приводимыми в движение парой циркулярных цепей. Консольный перегружатель 140 может быть прикреплен к приводу в основном штреке и может перемещаться вдоль основного штрека 220 или вбок внутри основного штрека 220. Ленточный транспортер 150 принимает руду от консольного перегружателя 140 и транспортирует руду к поверхности рудника. Ленточный транспортер 150 может продолжаться от конца консольного перегружателя 140 до поверхности.
[0027] Механизированные опоры 120 крыши поддерживают крышу подземного рудника 200 и продвигают забойный скребковый конвейер 130 во время операции добычи. Механизированные опоры 120 располагаются вдоль рудного забоя 240, обеспечивая поддержку крыши над забойным скребковым конвейером 130 и длиннозабойной врубовой машиной 110. В некоторых вариантах осуществления механизированные опоры 120 включают в себя навес и вертикальные и горизонтальные гидравлические цилиндры. Навес может быть прижат к крыше вертикальными цилиндрами, для того чтобы поддерживать крышу во время операции добычи, тогда как горизонтальные цилиндры могут быть использованы для продвижения механизированных опор 120 крыши и забойного скребкового конвейера 130 в направлении повторной обработки сплошного массива 210 (то есть вниз на фиг. 2).
[0028] Монорельсовая система 160 несет на себе определенное длиннозабойное оборудование, используемое системой длиннозабойной разработки. Например, монорельсовая система 160 несет на себе находящиеся под высоким давлением водяные и гидравлические шланги, которые используются для охлаждения длиннозабойной врубовой машины во время процесса добычи. Монорельсовая система 160 также несет на себе кабели управления подачей питания и связи для работы системы 100 длиннозабойной разработки.
[0029] Хотя в приведенном выше описании система 100 длиннозабойной разработки показана с конкретным расположением всех компонентов, специалистам в данной области техники будет понятно, что расположение на фиг. 1 представляет только приводимый в качестве примера вариант осуществления настоящего изобретения. Другие варианты осуществления могут включать в себя больше или меньше компонентов, располагаемых не так, как показано.
[0030] Когда один слой сплошного массива 210 разработан, система 100 длиннозабойной разработки отводится в направлении рудного забоя 240, для того чтобы разрабатывать следующий, вновь открывшийся слой сплошного массива 210.
[0031] Когда система 100 длиннозабойной разработки находится в работе, компоненты системы 100 длиннозабойной разработки могут смещаться или сползать по направлению к одному из двух штреков. Например, как показано на фиг. 3A, забойный скребковый конвейер 130 и консольный перегружатель 140 могут смещаться или сползать в направлении основного штрека 220. Подобным образом забойный скребковый конвейер 130 и консольный перегружатель 140 могут смещаться или сползать в направлении хвостового штрека 230, как показано на фиг. 3B. Такое перемещение компонентов системы 100 длиннозабойной разработки по направлению к любому из штреков называется ʺсползанием по забоюʺ. Сползание по забою может привести в результате к ограниченному зазору в основном штреке 220, препятствующему доступу персонала к длиннозабойной врубовой машине 110. Сползание по забою может также привести к повреждению консольного перегружателя 140 и длиннозабойного оборудования.
[0032] На фиг. 4 показана система 400 обнаружения, используемая с системой 100 длиннозабойной разработки, изображенной на фиг. 1, для обнаружения сползания по забою системы 100 длиннозабойной разработки. В приведенном примере система 400 обнаружения включает в себя устройство 410 обнаружения, индикаторное устройство 420 консольного перегружателя (BSL), индикаторное устройство 430 транспортера и индикаторное устройство 440 основного штрека.
[0033] Устройство 410 обнаружения обнаруживает сползание по забою, определяя относительные положения компонентов системы 100 длиннозабойной разработки. Устройство 410 обнаружения может быть установлено на оборудовании основного штрека (например, на монорельсовой системе 160). В некоторых вариантах осуществления устройство 410 обнаружения может располагаться в других местах в основном штреке 220. Устройств 410 обнаружения может включать в себя устройство радиообнаружения и определения дальности (RADAR), оптический локатор (LIDAR), звуковое устройство навигации и определения дальности (SONAR) или другое известное электронное измерительное устройство, способное считывать угол и расстояние и/или пространственные координаты объекта.
[0034] BSL индикаторное устройство 420 (например, первое индикаторное устройство) указывает положение места сопряжения консольного перегружателя 140 и забойного скребкового конвейера, называемого границей контакта между консольным перегружателем и -забойным скребковым конвейером. Граница контакта между консольным перегружателем изабойным скребковым конвейером может быть, например, положением на консольном перегружателе 140, на забойном скребковом конвейере 130 или на сопряженном с основным штреком конце 232, которое в общем случае является указателем точки пересечения консольного перегружателя и забойного скребкового конвейера. BSL индикаторное устройство 420 может быть установлено на центральной линии 450 консольного перегружателя 140. В некоторых вариантах осуществления BSL индикаторное устройство 420 может устанавливаться на пересечении центральной линии 450 консольного перегружателя и центральной линии 460 забойного скребкового контейнера, как показано на фиг. 4. Здесь граница контакта между консольным перегружателем и забойным скребковым конвейером является точкой, в которой консольный перегружатель поворачивается по отношению к забойному скребковому конвейеру 130, когда забойный скребковый конвейер 130 сползает по направлению или в сторону от основного штрека 220. В других вариантах осуществления BSL индикаторное устройство 420 может устанавливаться в других местах на консольном перегружателе 140.
[0035] Индикаторное устройство 430 транспортера (например, второе индикаторное устройство) указывает положение ленточного транспортера 150 устройству 410 обнаружения. Индикаторное устройство 430 транспортера может устанавливаться на центральной линии 470 ленточного транспортера 150 (как показано). В некоторых вариантах осуществления индикаторное устройство 430 транспортера может устанавливаться в других местах ленточного транспортера 150.
[0036] Индикаторное устройство 440 основного штрека (например, третье индикаторное устройство) указывает положение основного штрека 220 устройству 410 обнаружения. В частности, индикаторное устройство 440 основного штрека указывает местоположение линии основного штрека. Линия основного штрека продолжается в направлении основного штрека 220. Например, линия основного штрека является центральной линией основного штрека 220 (центральная линия 480 основного штрека), центральной линией монорельсовой системы 160 или линией вдоль поверхности стены с любой стороны центральной линии 480 основного штрека, которая определяет основной штрек 220. В некоторых вариантах осуществления центральная линия монорельсовой системы совпадает с центральной линией 480 основного штрека. Индикаторное устройство 440 основного штрека может устанавливаться на монорельсовой системе 160 или в другом месте в основном штреке 220 для указания положения линии основного штрека. Когда индикаторное устройство не располагается на линии основного штрека, устройство 410 обнаружения может определить положение линии основного штрека, используя заданное смещение, указывающее смещение индикаторного устройства 440 основного штрека от линии основного штрека. Для упрощения обсуждения центральная линия 480 основного штрека обычно описывается и используется здесь как линия основного штрека для определения сползания по забою. Однако в некоторых вариантах осуществления линия основного штрека, используемая для определения сползания по забою, может быть смещена от центрально линии 480 основного штрека. В некоторых вариантах осуществления устройство 410 обнаружения располагается на центральной линии 480 основного штрека и ориентируется на этапе установки таким образом, чтобы центральная линия 480 основного штрека была известна устройству 410 обнаружения без осуществления связи с индикаторным устройством 440 основного штрека, которое может быть не представлено в системе в таких вариантах осуществления.
[0037] В некоторых вариантах осуществления устройство 410 обнаружения включает в себя передатчик для передачи радио, световых или звуковых сигналов в направлении индикаторных устройств 420, 430 и 440. Индикаторные устройства 420, 430 и 440 включают в себя отражатели, которые отражают сигналы, поступившие от устройства 410 обнаружения. Устройство 410 обнаружения также включает в себя приемник для приема отраженных сигналов от индикаторных устройств 420, 430 и 440. Альтернативно индикаторные устройства 420, 430 и 440 могут включать в себя маяки, которые передают радио, световые или звуковые сигналы в направлении устройства 410 обнаружения. В некоторых вариантах осуществления только одно из индикаторных устройств 420, 430 и 440 может быть использовано для определения сползания по забою системы 100 длиннозабойной разработки. Кроме того, в некоторых вариантах осуществления устройство 410 обнаружения может включать в себя множество приемников, установленных в разных местах для приема данных о положении от индикаторных устройств 420, 430 и 440. В других вариантах осуществления может быть использовано большее число индикаторных устройств, чем показано на фиг. 4, для определения сползания по забою системы 100 длиннозабойной разработки. Поэтому показанное число и положение приемников и индикаторных устройств приведено в качестве примера и не должно рассматриваться как ограничивающее.
[0038] На фиг. 5 показана система 490 управления, связанная с системой 100 длиннозабойной разработки. Система 490 включает в себя контроллер 500, соединенный (например, электрически или с возможностью связи) с рядом дополнительных модулей или компонентов, таких как модуль 510 пользовательского интерфейса, один или более системных индикаторов 520, модуль 530 источника питания, один или более датчиков 540, устройство 410 обнаружения сползания, устройство 550 обнаружения выравнивания и приводной механизм и привод 560 опоры крыши. Должно быть понятно, что на фиг. 5 показан только один приводимый в качестве примера вариант осуществления системы 490 управления и что система 490 управления может включать в себя больше или меньше компонентов и может выполнять дополнительные функции, отличающиеся от тех, которые описаны здесь.
[0039] Один или более датчиков 540 являются, например, датчиками, выполненными с возможностью или пригодными для измерения или считывания характеристик длиннозабойной врубовой машины 110 (например, положения врубовой машины, скорости движения врубовой машины, и т.п.), датчиками, выполненными с возможностью или пригодными для измерения или считывания характеристик конвейеров, таких как забойный скребковый конвейер 130, консольный перегружатель 140 и ленточный транспортер 150 (например, положения цепи, частоты вращения цепи, натяжения цепи, и т.п.), датчиками мощности внутри системы 100 длиннозабойной разработки, выполненными с возможностью или пригодными для измерения или считывания электрических характеристик (например, тока, напряжения, коэффициента мощности, крутящего момента, частоты вращения, входной мощности, выходной мощности, и т.п.), ячейками или датчиками нагрузки (например, тензодатчиками, штифтами нагрузки, и т.п.), пригодными для генерации сигнала, относящегося к нагрузке конвейеров, и т.п.
[0040] Контроллер 500 включает в себя сочетание аппаратных средств и программного обеспечения, которое пригодно, среди прочего, для генерации выходного сигнала, относящегося к состоянию исправности системы 100 длиннозабойной разработки, управления работой системы 100 длиннозабойной разработки, приведения в действие одного или более индикаторов 520 (например, жидкокристаллического дисплея, LCD) и мониторинга работы системы 100 длиннозабойной разработки. В некоторых вариантах осуществления контроллер 500 включает в себя множество электрических и электронных компонентов, которые обеспечивают подачу электропитания, операционное управление и защиту для компонентов и модулей внутри контроллера 500 и/или системы 100 длиннозабойной разработки. Например, контроллер 500 включает в себя, среди прочего, электронный процессор 580 (например, микропроцессор, микроконтроллер или другое подходящее программируемое устройство), память 590, вводные устройства 502 и выводные устройства 504. Электронный процессор 508 включает в себя, среди прочего, устройство 582 управления, арифметико-логическое устройство (ALU) 584 и множество регистров 586, и реализуется, используя известную компьютерную архитектуру, такую как модифицированная гарвардская архитектура, архитектура фон Неймана, и т.п. Электронный процессор 580, память 590, вводные устройства 502 и выводные устройства 504, а также различные модули, подсоединенные к контроллеру 500, подсоединяются одной или более шинами управления и/или передачи данных (например, общей шиной 506). Шины управления и/или передачи данных показаны в общем виде на фиг. 5 в целях иллюстрации. Использование одной или более шин управления и/или передачи данных для взаимного соединения и обеспечения связи среди различных модулей и компонентов должно быть известно специалистам в данной области техники, принимая во внимание изобретение, описываемое здесь. В некоторых вариантах осуществления контроллер 500 реализуется частично или полностью на полупроводниковом кристалле, является программируемой пользователем вентильной матрицей (FPGA, является специализированной заказной интегральной схемой (ASIC), пропорционально-интегрально-дифференциальным контроллером (PID), и т.п.
[0041] Память 590 включает в себя, например, область хранения программ и область хранения данных. Область хранения программ и область хранения данных могут включать в себя сочетания разных типов памяти, таких как постоянная память (ROM), оперативная память (RAM), динамическая RAM (DRAM), синхронная DRAM (SDRAM), и т.п., электрически стираемая программируемая постоянная память (EEPROM), флэш-память, жесткий диск, SD карта памяти или же другое подходящее магнитное, оптическое, физическое или электронное запоминающее устройство, или структуры данных. Электронный процессор 580 подсоединен к памяти 590 и выполняет команды программного обеспечения, которые способны запоминаться в RAM в памяти 590 (например, во время выполнения), ROM в памяти 590 (например, обычно на постоянной основе) или в другом энергонезависимом машиночитаемом носителе информации, таком как другая память или диск. Программное обеспечение, включенное в реализацию системы 100 длиннозабойной разработки, может запоминаться в памяти 590 контроллера 500. Программное обеспечение включает в себя, например, встроенные программы, одно или более приложений, данные программ, фильтры, правила, один или более программных модулей и другие подлежащие исполнению команды. Контроллер 500 считывает из памяти и исполняет, среди прочего, команды, относящиеся к процессам и способам управления, описанным здесь. В других конструкциях контроллер 500 включает в себя дополнительное число, меньшее число или другие компоненты.
[0042] Контроллер 500 может принимать указание о сползании по забою от устройства 410 обнаружения сползания. Альтернативно контроллер 500 определяет сползание по забою из данных о положении, принятых от устройства 410 обнаружения сползания. В некоторых вариантах осуществления контроллер 500 может также принимать информацию о выравнивании по забою от устройства 550 обнаружения выравнивания. В некоторых вариантах осуществления устройство 550 обнаружения выравнивания подобно устройству обнаружения, описанному в совместно поданной заявке на патент США №__________, озаглавленной ʺОбнаружение и управление выравниванием по забою в системе разработки длинными забоямиʺ, содержание которой включено сюда полностью путем ссылки. Хотя устройство 410 обнаружения сползания и устройство 550 обнаружения выравнивания показаны как два отдельных компонента, в других вариантах осуществления комбинированное устройство обнаружения может использоваться для обнаружения как сползания по забою, так и выравнивания по забою.
[0043] Приводной механизм и привод 560 опор крыши управляется сигналами управления, принимаемыми от контроллера 500 или другого связанного с ним контроллера. Каждая механизированная опора 120 крыши связана с секцией забойного скребкового конвейера 130 и использует гидравлический толкатель для продвижения этой секции забойного скребкового конвейера 130. Управляя количеством движения гидравлических толкателей, привод 560 может изменять угол продвижения забойного скребкового конвейера 130. В некоторых вариантах осуществления контроллер 500 управляет приводом 560 и системой 100 длиннозабойной разработки автономно, используя устройства 410, 550 обнаружения, один или более датчиков 540 и одну или более запомненных программ или модулей. В других вариантах осуществления контроллер 500 управляет приводом 560 и системой 100 длиннозабойной разработки, основываясь на сочетании вводимых вручную данных и автоматических органов управления.
[0044] Модуль 510 пользовательского интерфейса обеспечивает интерфейс для приема сигналов управления от пользователя и обеспечения обратной связи с пользователем для управления и мониторинга длиннозабойной врубовой машины 110, конвейеров 130, 140, 150 и/или системы 100 длиннозабойной разработки. Например, модуль 510 пользовательского интерфейса функционально подсоединен к контроллеру 500 для управления скоростью движения длиннозабойной врубовой машины 110, скоростью конвейеров 130, 140, 150, частотой вращения привода 560, количеством повторов между циклами врубовой машины, и т.п. Модуль 510 пользовательского интерфейса может включать в себя сочетание цифровых и аналоговых вводных или выводных устройств, требуемых для достижения желаемого уровня управления и мониторинга применительно к системе100 длиннозабойной разработки. Например, модуль 510 пользовательского интерфейса может включать в себя дисплей и вводные устройства, такие как дисплей с сенсорным экраном, одна или более ручек управления, дисковые регуляторы, переключатели, кнопки, и т.п. Дисплей является, например, жидкокристаллическим дисплеем (LCD), дисплеем на светоизлучающих диодах (LED), органическим LED (OLED) дисплеем, электролюминесцентным дисплеем (ELD), дисплеем с электронной эмиссией за счет поверхностной проводимости (SED), дисплеем с автоэлектронной эмиссией (FED), LCD тонкопленочной технологии (TFT), и т.п. В других конструкциях дисплей является дисплеем со сверхактивной матрицей на органических светодиодах (AMOLED). Модуль 510 пользовательского интерфейса может быть также выполнен или пригоден для воспроизведения на дисплее условий или данных, связанных с системой 100 длиннозабойной разработки, в реальном времени или по существу в реальном времени. Например, модуль 510 пользовательского интерфейса выполняется с возможностью или пригоден для воспроизведения на дисплее измеренных характеристик системы 100 длиннозабойной разработки (например, длиннозабойной врубовой машины 110, конвейеров 130, 140, 150, и т.п.), состояния системы 100 длиннозабойной разработки, величины сползания по забою системы 100 длиннозабойной разработки, выравнивания по забою системы 100 длиннозабойной разработки, и т.п. В некоторых случаях реализации модуль 510 пользовательского интерфейса управляется в сочетании с одним или более индикаторами 520 (например, LED) для обеспечения визуального указания состояния или условий системы 100 длиннозабойной разработки, включая сюда сползание по забою и выравнивание по забою.
[0045]. Хотя на фиг. 5 показан один контроллер, в других конструкциях контроллер 500 может быть разделен на множество контроллеров. Например, контроллер 500 может быть разделен на объединенное устройство управления (CCU), программируемое устройство управления (PCU), и т.п. CCU может быть заключено в защищающий от внешних воздействий корпус и обеспечивать управление всей конвейерной системой. PCU является конструктивно безопасной системой, которая может сопрягаться с CCU для, среди прочего, остановки, сдерживания, включения, и т.п., работы конвейера.
[0046] Как было указано ранее, устройство 410 обнаружения определяет относительное положение консольного перегружателя 140 и ленточного транспортера 10 по отношению к положению центральной линии 480 основного штрека. Контроллер 500 принимает эту информацию о положении от устройства 410 обнаружения. Затем контроллер 500 обрабатывает и анализирует информацию о положении, чтобы определить сползание по забою системы 100 длиннозабойной разработки. В некоторых вариантах осуществления, определяя смещение границы контакта между консольным перегружателем и -забойным скребковым конвейером и центральной линии 470 ленточного транспортера по отношению к центральной линии 480 монорельса или основного штрека, контроллер 500 определяет относительное положение границы контакта между консольным перегружателем и- забойным скребковым конвейером (BSL-AFC) по отношению к идеальному положению. Контроллер 500 может итеративно определить относительное положение границы контакта BSL-AFC по отношению к идеальному положению и графически отобразить тенденцию, чтобы указать направление сползания. В некоторых вариантах осуществления контроллер 500 может также вычислять зазор между консольным перегружателем 140 и стенками основного штрека. В некоторых вариантах осуществления сползание по забою вычисляется как разность между (а) расстоянием между центральной линией 470 консольного перегружателя и центральной линией 480 основного штрека и (b) расстоянием между границей контакта междуконсольным перегружателем и-забойным скребковым конвейером и центральной линией 480 основного штрека. Используя это вычисление, в некоторых вариантах осуществления может оказаться желательным иметь сползание по забою равное нулю. Способ определения сползания по забою системы 100 длиннозабойной разработки описывается более подробно ниже со ссылками на фиг. 6 и 7.
[0047] В некоторых вариантах осуществления контроллер 500 может принимать корректирующие меры для уменьшения сползания по забою, обнаруживаемого устройством 410 обнаружения. Контроллер 500 прежде всего определяет, указывает ли сползание по забою смещение в сторону к основному штреку (например, как показано на фиг. 3A) или смещение в сторону от основного штрека (например, как показано на фиг. 3B). Затем контроллер 500 осуществляет управление приводным механизмом и приводом 560 опор крыши, чтобы переместить конвейеры 130 и 140 в направлении или в сторону от основного штрека 220, для того чтобы привести сползание по забою к нулю. Способы корректирования сползания по забою системы 100 длиннозабойной разработки описаны более подробно ниже со ссылками на фиг. 8, 9A и 9B.
[0048] Процессы 600, 700 и 800 связаны и описаны здесь применительно к обнаружению сползания по забою системы 100 длиннозабойной разработки и управлению перемещением системы 100 длиннозабойной разработки, используя механизированные опоры 120 крыши, на основе обнаружения сползания по забою. Различные этапы, описываемые здесь, относящиеся к процессам 600, 700 и 800, могут выполняться одновременно, параллельно или в порядке, который отличается от представленного последовательного порядка выполнения. Процессы 600, 700 и 800 могут также выполняться, используя меньшее число этапов, чем показаны в представленном примере осуществления. Дополнительно контроллер 500 и устройство 410 обнаружения выполнены с возможностью выполнения процессов 600, 700 и 800 одновременно или параллельно с другими процессами.
[0049] На фиг. 6A показан процесс 600 для обнаружения сползания по забою системы 100 длиннозабойной разработки. На этапе 610 контроллер 500 определяет положение системы 100 длиннозабойной разработки (например, линии основного штрека), основываясь на сигнале от индикаторного устройства 440 основного штрека. Например, устройство 410 обнаружения принимает сигнал, указывающий положение индикаторного устройства 440 основного штрека. Устройство 410 обнаружения, в свою очередь, передает положение индикаторного устройства 440 основного штрека (например, по отношению к устройству 410 обнаружения) контроллеру 500. Например, устройство 410 обнаружения и индикаторное устройство 440 основного штрека могут оба располагаться в местоположении в основном штреке, известном контроллеру 500, таком как центральная линия 480 основного штрека. Устройство 410 обнаружения может определять расстояние и угол относительно устройства 410 обнаружения, в которых располагается индикаторное устройство 440, и доставлять эту информацию контроллеру 500. Контроллер 500, в свою очередь, может нанести (графически или в цифровой форме) устройство 410 отображения как расположенное в исходной позиции и индикаторное устройство 440 основного штрека как расположенное во второй позиции, и линия, прочерченная между исходной позицией и второй позицией, определяется контроллером 500 как центральная линия 480 основного штрека. Когда одно или оба из устройства 410 обнаружения или индикаторного устройства 440 основного штрека не располагаются на центральной линии 480 основного штрека, заданные значения (например, определенные на этапе установки) могут быть применены контроллером 500, чтобы вычислить смещение и определить положение центральной линии 480 основного штрека.
[0050] Сигнал, принятый от индикаторного устройства 440 основного штрека, может быть, например, периодическим сигналом, генерируемым индикаторным устройством 440 основного штрека, может генерироваться индикаторным устройством 440 в ответ на команду от контроллера 500 (например, посылаемую по проводным или беспроводным соединениям) или может быть отражением сигнала, передаваемого устройством 410 обнаружения. В некоторых вариантах осуществления устройство 410 обнаружения располагается на центральной линии 480 основного штрека и ориентируется во время установки таким образом, что центральная линия 480 основного штрека известна и определяется устройством 410 обнаружения и контроллером 500 без сообщения с индикаторным устройством 440 основного штрека.
[0051] На этапе 620 контроллер 500 определяет положение границы контакта между консольным перегружателем и-забойным скребковым конвейером, основываясь на сигнале от BSL индикаторного устройства 420. Например, устройство 410 обнаружения принимает сигнал, указывающий положение границы контакта между консольным перегружателем и-забойным скребковым конвейером, от BSL индикаторного устройства 420. Устройство 410 обнаружения определяет расстояние и угол относительно устройства 410 обнаружения, на которых расположено индикаторное устройство 420, и доставляет эту информацию контроллеру 500. Контроллер 500, в свою очередь, может добавить относительное положение границы контакта между консольным перегружателем и-забойным скребковым конвейером, в график, генерируемый на этапе 610.
[0052] Сигнал, принятый от BSL индикаторного устройства 420, может быть, например, периодическим сигналом, генерируемым BSL индикаторным устройством 420, может генерироваться BSL индикаторным устройством 420 в ответ на команду от контроллера 500 (например, посылаемую по проводному или беспроводному соединению) или может быть отражением сигнала, переданного устройством 410 обнаружения.
[0053] На этапе 630 контроллер 500 определяет расстояние (например, в метрах (м) между границы контакта междуконсольным перегружателем и-забойным скребковым конвейером и центральной линией 480 основного штрека, используя данные о положении, полученные на этапах 610 и 620. Расстояние между границей контакта между консольным перегружателем и-забойным скребковым конвейером и центральной линией 480 основного штрека может вычисляться, используя способ 700, описываемый ниже. Определенное расстояние может быть расстоянием по линии, перпендикулярной к центральной линии 480 основного штрека, до границы контакта между консольным перегружателем и-забойным скребковым конвейером.
[0054] На фиг. 6B, например, дано графическое представление различных положений и расстояний, определенных в процессе 600, включая сюда определенные положения с этапов 610 и 620, а также расстояние, вычисленное на этапе 630. Более конкретно, график 631 представляет устройство 410 обнаружения в исходном положении 632, индикаторное устройство 440 основного штрека во втором положении 632 на центральной линии и BSL индикаторное устройство 420 (представляющее границы контакта междуконсольным перегружателем и-забойным скребковым конвейером) в позиции 634 границы. На графике 631 ось y представляет центральную линию 480 основного штрека, а ось x представляет направление, перпендикулярное к центральной линии 480 основного штрека и, в общем случае, параллельное рудному забою 240. Первое расстояние 635 представляет расстояние по линии, перпендикулярной к центральной линии 480 основного штрека, до позиции 634 границы (границы контакта между консольным перегружателем и-забойным скребковым конвейером), которая может быть вычислено на этапе 630.
[0055] На этапе 640 контроллер 500 определяет положение консольного перегружателя 150, основываясь на сигнале от индикатора 430 транспортера. Например, устройство 410 обнаружения принимает сигнал, указывающий положение ленточного транспортера 150, от индикатора 430 транспортера. Устройство 410 обнаружения может определить расстояние и угол относительно устройства 410 обнаружения, на которых располагается ленточный транспортер 150, и доставить эту информацию в контроллер 500. Контроллер 500, в свою очередь, может добавить относительное положение ленточного транспортера 150 в график, генерируемый на этапе 610. График 631 на фиг. 6B представляет пример определенного положения ленточного транспортера 150 в третьем положении 642.
[0056] Сигнал, принятый от индикатора 430 транспортера, может быть, например, периодическим сигналом, генерируемым индикатором 430 транспортера, может генерироваться индикатором 430 транспортера в ответ на команду от контроллера 500 (например, посылаемую по проводному или беспроводному соединению) или же может быть отражением сигнала, переданного устройством 410 обнаружения.
[0057] На этапе 650 контроллер 500 определяет расстояние (например, в метрах (м)) между ленточным транспортером 150 и центральной линией 480 основного штрека, используя данные о положении, полученные на этапах 610 и 640. Расстояние между ленточным транспортером 150 и центральной линией 480 основного штрека может быть вычислено, используя способ 700, описываемый ниже. Определенное расстояние может быть расстоянием по линии, перпендикулярной к центральной линии 480 основного штрека, до ленточного транспортера 150. Например, второе расстояние представляет расстояние по линии, перпендикулярной к центральной линии 480 основного штрека, до ленточного транспортера 150, которое может быть вычислено на этапе 650.
[0058] На этапе 660 контроллер 500 определяет сползание по забою, вычисляя разность между (a) расстоянием между ленточным транспортером 150 и центральной линией 480 основного штрека с этапа 650 (см., например, второе расстояние 655 на фиг. 6B) и (b) расстоянием между границей контакта между консольным перегружателем и-забойным скребковым конвейером и центральной линией 480 основного штрека с этапа 630 (см., например, первое расстояние 635 на фиг. 6B). Например, в представленном построении равная нулю разность, вычисленная на этапе 660 (например, первое расстояние 635 равно второму расстоянию 655), указывает отсутствие сползания по забою. Положительная разность, вычисленная на этапе 660 (например, второе расстояние 655 больше первого расстояния 635) указывает, что консольный перегружатель 140 находится ближе к центральной линии 480 основного штрека, чем ленточный транспортер 150, и система 100 длиннозабойной разработки испытывает сползание по забою со смещением в сторону к основному штреку. Отрицательная разность, вычисленная на этапе 660 (например, первое расстояние 635 больше второго расстояния 655) указывает, что консольный перегружатель 140 находится дальше от центральной линии 480 основного штрека, чем ленточный транспортер 150, и система 100 длиннозабойной установки испытывает сползание по забою со смещением в сторону от основного штрека.
[0059] На этапе 670 контроллер 500 генерирует указание о сползании по забою. Такое указание может быть выходным сигналом на пользовательский интерфейс, передаваемым дистанционно, сохраняемым для графического представления, и т.п. Процесс 600 возвращается обратно к этапу 610, чтобы непрерывно определять сползание по забою системы 100 длиннозабойной разработки. В некоторых вариантах осуществления контроллер 500 графически представляет тенденцию значений, вычисляемых в процессе 600, для того чтобы определить направление сползания по забою.
[0060] В некоторых вариантах осуществления индикатор 430 ленточного транспортера располагается в другом положении внутри основного штрека 220, а не на ленточном транспортере 150, например, на разных компонентах, смещенных относительно линии основного штрека, или на стенке основного штрека 220. В таких вариантах осуществления заданное смещение используется на этапе 640 для вычисления положения ленточного транспортера 150 относительно положения индикатора 430 ленточного транспортера, или конкретное положение индикатора 430 ленточного транспортера используется как опорная точка вместо положения ленточного транспортера при вычислении второго расстояния на этапе 650 для использования на этапе 660.
[0061] На фиг. 7 показан приводимый в качестве примера процесс 700 вычисления расстояния между индикаторным устройством (например, BSL индикаторным устройством 420 или индикаторным устройством 430 транспортера) и центральной линией 480 основного штрека. На этапе 710 контроллер 500 определяет расстояние между устройством 410 обнаружения и индикаторным устройством, основываясь на сигнале о положении, принятом от индикаторного устройства. Контроллер 500 определяет угол (например, φ или 180-θ на фиг. 4) между линией, соединяющей устройство 410 обнаружения с индикаторным устройством (например, линии 722 и 724 на фиг. 4) и центральной линией 480 основного штрека (этап 720). Например, контроллер 500 может принимать координаты индикаторного устройства от устройства 410 обнаружения. Контроллер 500 может затем определить угол и расстояние индикаторного устройства, определяя относительное положение индикаторного устройства по отношению к устройству 410 обнаружения на основе принятых координат.
[0062] На этапе 730 контроллер 500 вычисляет расстояние между индикаторным устройством и центральной линией 480 основного штрека, умножая расстояние с этапа 710 на синус угла (φ или 180-θ), вычисленного на этапе 720. Используя этот процесс 700, контроллер 500 вычисляет расстояние между центральной линией 470 ленточного транспортера, центральной линией 450 консольного перегружателя и центральной линией 480 основного штрека. Альтернативно контроллер может также вычислять расстояние непосредственно, основываясь на координатах различных компонентов, принятых от устройства 410 обнаружения.
[0063] В приведенном выше описании процессы 600 и 700 описывают способы вычисления расстояния между центральными линиями различных компонентов. Однако специалистам в данной области техники должно быть понятно, что другие способы вычисления относительно положения различных компонентов могут быть использованы для определения сползания по забою системы 100 длиннозабойной разработки. Например, сползание по забою может быть определено вычислением расстояния меду концевыми линиями, краями, и т.п. различных компонентов.
[0064] В некоторых вариантах осуществления электронный процессор 580 контроллера 500 определяет сползание по забою, используя данные о положении, принятые от устройства 410 обнаружения. В некоторых вариантах осуществления контроллер 500 включен в состав устройства 410 обнаружения. В других вариантах осуществления электронный процессор может быть включен в состав устройства 410 обнаружения для определения сползания по забою. Указание о сползании по забою тогда сообщается контроллеру 500 от устройства 410 обнаружения.
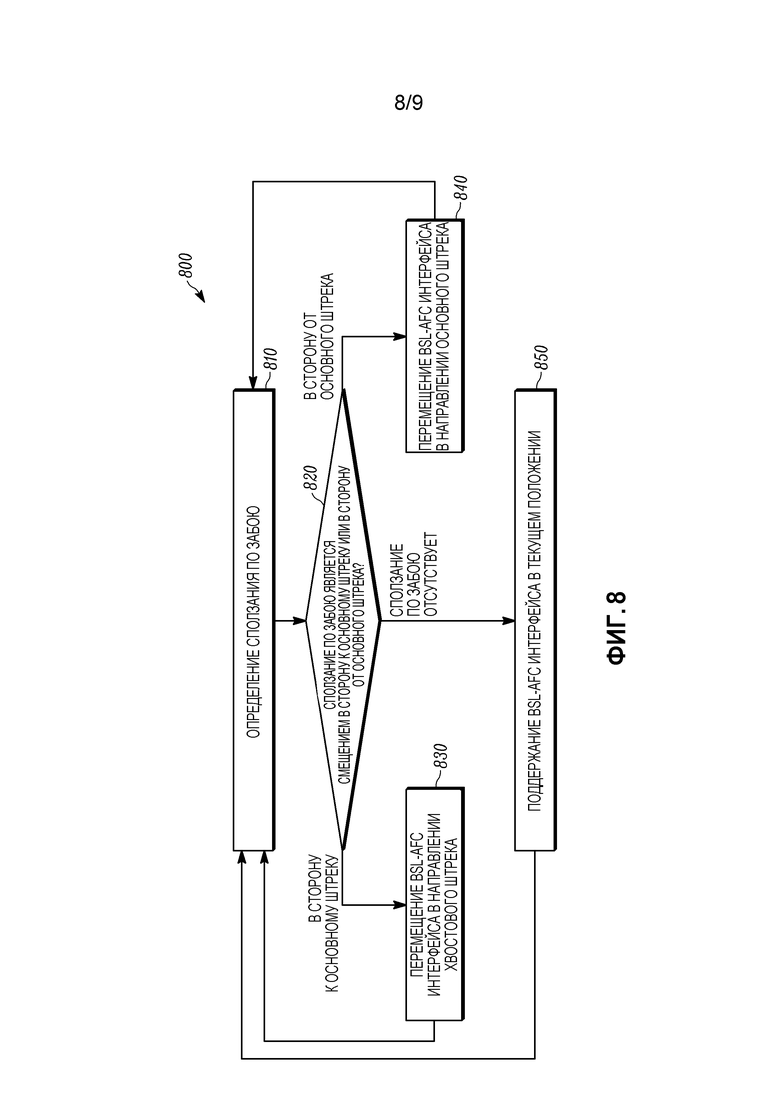
[0065] На фиг. 8 показан процесс 800 коррекции сползания по забою, обнаруженного системой 490 управления. На этапе 810 контроллер 500 определяет сползание по забою для системы 100 длиннозабойной разработки, используя, например, процесс 600, описанный выше со ссылками на фиг. 6A, для генерации указания о сползании по забою. На этапе 820 контроллер 500 определяет, испытывает ли система 100 длиннозабойной разработки сползание по забою, имеющее смещение в сторону к основному штреку, сползание по забою, имеющее смещение в сторону от основного штрека, или не испытывает сползания по забою, основываясь на указании о сползании по забою. Возвращаясь к фиг. 3A и 3B, система 100 длиннозабойной разработки смещена в сторону к основному штреку (фиг. 3A), когда границы контакта междуконсольным перегружателем и-забойным скребковым конвейером сползает по направлению к основному штреку 220. Как описано выше, контроллер 500 определяет, что сползание по забою является смещением в сторону к основному штреку, когда расстояние между границей контакта между консольным перегружателем и-забойным скребковым конвейером и центральной линией 480 основного штрека меньше расстояния между ленточным транспортером150 и центральной линией 480 основного штрека (то есть обнаруженное сползание по забою является положительным). Подобным образом система 100 длиннозабойной разработки смещена в сторону от основного штрека (фиг. 3B), когда граница контакта между консольным перегружателем и-забойным скребковым конвейером сползает по направлению к хвостовому штреку 230. Как было описано выше, контроллер 500 определяет, что сползание по забою является смещением в сторону от основного штрека, когда расстояние между границей контакта между консольным перегружателем и-забойным скребковым конвейером и центральной линией 480 основного штрека больше расстояния между ленточным транспортером 150 и центральной линией 480 основного штрека (то есть обнаруженное сползание по забою является отрицательным).
[0066] Когда контроллер 500 определяет, что система 100 длиннозабойной разработки испытывает сползание по забою со смещением в сторону к основному штреку, контроллер 500 управляет приводом 560, чтобы переместить забойный скребковый конвейер 130, и тем самым граница контакта между консольным перегружателем и-забойным скребковым конвейером, по направлению к хвостовому штреку (этап 830). Подобным образом, когда контроллер 500 определяет, что система 100 длиннозабойной разработки испытывает сползание по забою со смещением в сторону от основного штрека, контроллер 500 управляет приводом 560, чтобы переместить забойный скребковый конвейер 130, и тем самым граница контакта между консольным перегружателем и-забойным скребковым конвейером, по направлению к основному штреку (этап 840). Если сползание по забою отсутствует, контроллер 500 поддерживает границк контакта между консольным перегружателем и-забойным скребковым конвейером в его текущем положении. После этапов 830, 840 или 850 контроллер 500 возвращается к этапу 810, чтобы определить сползание по забою для системы 100 длиннозабойной разработки, основываясь на обновленной информации от устройства 410 обнаружения.
[0067] Процессы 600, 700 и 800, описанные выше, представляют только один пример вычисления сползания по забою системы 100 длиннозабойной разработки. Другие способы, схемы и технические приемы возможны и предполагаются настоящим изобретением. Поэтому способы, схемы и технические приемы, описанные выше, являются приводимыми в качестве примера и не должны рассматриваться как ограничивающие.
[0068] На фиг. 9A представлен в качестве примера способ коррекции смещения в сторону к основному штреку, применимый для реализации этапа 830 на фиг. 8. Когда контроллер 500 определяет, что система 100 длиннозабойной разработки смещена в сторону к основному штреку, контроллер 500 управляет приводом 560, чтобы продвинуть механизированные опоры 120 крыши, и тем самым забойный скребковый конвейер 130, таким образом, чтобы опоры крыши, находящиеся ближе к основному штреку 220, продвинулись дальше, чем опоры крыши, находящиеся ближе к хвостовому штреку 230. Механизированные опоры 120 крыши продвигаются приводом 560 таким образом, что линия 910, прочерченная через центры механизированных опор 120 крыши после продвижения, находится под углом α, превышающим 90 градусов по отношению к центральной линии 920 основного штрека. Контроллер продолжает такое продвижение с углом α, превышающим 90 градусов, для каждого слоя сплошного массива до тех пор, пока сползание по забою, определяемое контроллером 500, не станет равным нулю.
[0069] На фиг. 9B представлен в качестве примера способ коррекции смещения в сторону хвостового штрека, применимый для реализации этапа 840 на фиг. 8. Когда контроллер 500 определяет, что система 100 длиннозабойной разработки смещена в сторону хвостового штрека, контроллер 500 управляет приводом 560, чтобы продвинуть механизированные опоры 120 крыши, и тем самым забойный скребковый конвейер 130, таким образом, чтобы опоры крыши, находящиеся ближе к хвостовому штреку 230, продвинулись дальше, чем опоры крыши, находящиеся ближе к основному штреку 220. Механизированные опоры 120 крыши продвигаются приводом 560 таким образом, что линия 910, прочерченная через центры механизированных опор 120 крыши после продвижения, находится под углом β, меньшим чем 90 градусов по отношению к центральной линии 920 основного штрека. Контроллер продолжает такое продвижение с углом β, меньшим 90 градусов, для каждого слоя сплошного массива до тех пор, пока сползание по забою, определяемое контроллером 500, не станет равным нулю.
[0070] Когда устройство 410 обнаружения определяет, что сползание по забою отсутствует, опоры 120 крыши могут продвигаться на одно и то же расстояние. Продвижение опор крыши на одно и то же расстояние является типовым способом реализации этапа 850 на фиг. 8. Кроме того, в некоторых вариантах осуществления контроллер 500 может быть запрограммирован на коррекцию сползания по забою, только когда сползание по забою превышает заданное пороговое значение. Дополнительно степень коррекции (например, указываемая углами α и β) может быть пропорциональна обнаруженной величине сползания по забою.
[0071] Таким образом, изобретение может в общем случае обеспечивать, среди прочего, системы и способы для обнаружения сползания по забою в системе длиннозабойной разработки.



Представлены система, способ и контроллер для обнаружения сползания по забою системы длиннозабойной разработки. Система включает в себя устройство обнаружения, установленное в основном штреке. Первое индикаторное устройство, расположенное на границе контакта между консольным перегружателем и забойным скребковым конвейером, для указания положения границы контакта между консольным перегружателем и забойным скребковым конвейером устройству обнаружения. Индикаторное устройство транспортера, установленное на ленточном транспортере. Контроллер, включающий в себя электронный процессор и память, причем контроллер подсоединен к устройству обнаружения и выполнен с возможностью определения положения границы контакта между консольным перегружателем и забойным скребковым конвейером, основываясь на сигнале от первого индикаторного устройства, определения первого расстояния между положением границы контакта между консольным перегружателем и забойным скребковым конвейером и линией основного штрека и определения положения ленточного транспортера, основываясь на третьем сигнале от третьего индикаторного устройства, определения второго расстояния между ленточным транспортером и линией основного штрека и генерации указания о сползании по забою, основываясь на первом расстоянии и втором расстоянии. 3 н. и 11 з.п. ф-лы, 12 ил.
1. Система для обнаружения сползания по забою системы длиннозабойной разработки, которая содержит:
устройство обнаружения, установленное в основном штреке;
первое индикаторное устройство, расположенное на границе контакта между консольным перегружателем и забойным скребковым конвейером, для указания положения границы контакта между консольным перегружателем и забойным скребковым конвейером устройству обнаружения;
индикаторное устройство транспортера, установленное на ленточном транспортере, для указания положения ленточного транспортера устройству обнаружения; и
контроллер, включающий в себя электронный процессор и память, причем контроллер подсоединен к устройству обнаружения и выполнен с возможностью:
определения положения границы контакта между консольным перегружателем и забойным скребковым конвейером, основываясь на сигнале от первого индикаторного устройства;
определения первого расстояния между положением границы контакта между консольным перегружателем и забойным скребковым конвейером и линией основного штрека; и
определения положения ленточного транспортера, основываясь на третьем сигнале от третьего индикаторного устройства;
определения второго расстояния между ленточным транспортером и линией основного штрека; и
генерации указания о сползании по забою, основываясь на первом расстоянии и втором расстоянии.
2. Система по п. 1, которая дополнительно содержит:
второе индикаторное устройство, установленное в основном штреке, для указания положения линии основного штрека устройству обнаружения; и
в которой контроллер дополнительно выполнен с возможностью определения положения линии основного штрека, основываясь на втором сигнале от второго индикаторного устройства.
3. Система по п. 1, в которой
указание о сползании по забою, генерируемое контроллером, указывает смещение в сторону от основного штрека, когда первое расстояние больше второго расстояния; и
указание о сползании по забою, генерируемое контроллером, указывает смещение в сторону к основному штреку, когда первое расстояние меньше второго расстояния;
4. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью:
управления механизированными опорами крыши вдоль рудного забоя для продвижения на угол меньше 90° относительно линии основного штрека, когда первое расстояние больше заданного значения; и
управления механизированными опорами крыши вдоль рудного забоя для продвижения на угол больше 90° относительно линии основного штрека, когда первое расстояние меньше заданного значения.
5. Система по п. 1, в которой устройство обнаружения является устройством радиообнаружения и определения дальности (RADAR).
6. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью воспроизведения указания о сползании по забою как в сторону от основного штрека, так и в сторону к основному штреку, на пользовательском интерфейсе системы длиннозабойной разработки.
7. Способ обнаружения сползания по забою системы длиннозабойной разработки, причем этот способ содержит:
обнаружение устройством обнаружения положения границы контакта между консольным перегружателем и забойным скребковым конвейером на основе первого сигнала от первого индикаторного устройства;
обнаружение устройством обнаружения положения ленточного транспортера на основе сигнала от первого индикаторного устройства транспортера;
определение контроллером, подсоединенным к устройству обнаружения, положения границы контакта между консольным перегружателем и забойным скребковым конвейером, основываясь на выходном сигнале от устройства обнаружения;
определения контроллером положения ленточного транспортера;
определение контроллером первого расстояния между положением границы контакта между консольным перегружателем и забойным скребковым конвейером и линией основного штрека; и
определения второго расстояния между ленточным транспортером и линией основного штрека; и
генерацию контроллером указания о сползании по забою, основываясь на первом расстоянии и втором расстоянии
8. Способ по п. 7, который дополнительно содержит:
обнаружение устройством обнаружения положения линии основного штрека; и
определение контроллером положения линии основного штрека, основываясь на другом выходном сигнале от устройства обнаружения.
9. Способ по п. 7, в котором генерация указания о сползании по забою включает в себя:
указание смещения в сторону от основного штрека, когда первое расстояние больше второго расстояния; и
указание смещения в сторону к основному штреку, когда первое расстояние меньше второго расстояния.
10. Способ по п. 7, который дополнительно содержит:
управление контроллером механизированными опорами крыши вдоль рудного забоя для продвижения на угол меньше 90° относительно линии основного штрека, когда первое расстояние больше заданного значения; и
управление контроллером механизированными опорами крыши вдоль рудного забоя для продвижения на угол больше 90° относительно линии основного штрека, когда первое расстояние меньше заданного значения
11. Контроллер для обнаружения сползания по забою системы длиннозабойной разработки, при этом контроллер содержит электронный процессор и подлежащую исполнению команду, хранимую в памяти, и выполнен с возможностью:
определения положения границы контакта между консольным перегружателем и забойным скребковым конвейером, основываясь на выходном сигнале от устройства обнаружения в соединении с первым индикаторным устройством, расположенном на границы контакта между консольным перегружателем и забойным скребковым конвейером
определения положения линии основного штрека;
определения положения ленточного транспортера на основании выходного сигнала от устройства обнаружения в соединении с первым индикаторным устройством транспортера, расположенным на ленточном транспортере;
определения первого расстояния между положением границы контакта между консольного перегружателя и забойным скребковым конвейером и линией основного штрека;
определения второго расстояния между положением ленточного транспортера и линией основного штрека; и
генерации указания о сползании по забою, основываясь на первом расстоянии и втором расстоянии.
12. Контроллер по п. 11, который дополнительно содержит подлежащую исполнению команду, хранимую в памяти, и выполнен с возможностью определения положения линии основного штрека, основываясь на выходном сигнале от устройства обнаружения, связанного со вторым индикаторным устройством, расположенным на монорельсе основного штрека.
13. Контроллер по п. 11, который дополнительно содержит подлежащую исполнению команду, хранимую в памяти, и выполнен с возможностью:
управления механизированными опорами крыши вдоль рудного забоя для продвижения на угол меньше 90° относительно линии основного штрека, когда первое расстояние больше заданного значения; и
управления механизированными опорами крыши вдоль рудного забоя для продвижения на угол больше 90° относительно линии основного штрека, когда первое расстояние меньше заданного значения.
14. Контроллер по п. 11, который дополнительно содержит подлежащую исполнению команду, хранимую в памяти, и выполнен с возможностью воспроизведения на дисплее указания о сползании по забою, причем
указание о сползании по забою указывает смещение в сторону от основного штрека, когда первое расстояние больше второго расстояния;
указание о сползании по забою указывает смещение в сторону к основному штреку, когда первое расстояние меньше второго расстояния.
| GB 1558154 A, 19.12.1979 | |||
| Способ разворота механизированного очистного комплекса | 1989 |
|
SU1675567A1 |
| СИСТЕМА ГОРНОЙ РАЗРАБОТКИ С НЕПРЕРЫВНЫМ ИЗВЛЕЧЕНИЕМ | 2011 |
|
RU2577867C2 |
| US 20100276258 A1, 04.11.2010 | |||
| US 20090134692 A1, 28.05.2009 | |||
| US 20130269453 A1, 17.10.2013 | |||
| US 2012091782 A1, 19.04.2012. | |||

