(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩЕЙ МАШИНОЙ В ПРОФИЛЕ ПЛАСТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1983 |
|
SU1132012A2 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Способ определения порогов срабатывания системы управления угольным комбайном в профиле пласта | 1982 |
|
SU1093808A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1985 |
|
SU1270321A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1985 |
|
SU1270322A1 |
| Автоматический регулятор положений исполнительного органа горной машины | 1983 |
|
SU1141192A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1975 |
|
SU899932A1 |
1
Изобретение относится к горной промышленности, а именно к автоматизации горных машин.
Известно устройство автоматического управления угледобывающей машиной в профиле пласта, содержащее датчик угла наклона, соединенный с регистратором местоположения комбайна, программный и вычислительный блоки 1 .
Однако это устройство не позволяет полностью автоматизировать управление угледобывающими машинами, так как в случае неспокойной гипсометрии пласта необходимо изменить программу управления, что требует, в свою очередь, постоянного ручного вмешательства операторов при отработке нового цикла.
Известно также устройство автоматического управления угледобывающей мащиной в профиле пласта, содержащее расположенный на исполнительном органе датчик порода-уголь, приемный блок, соединенный со входом электронного ключа, времязадающий элемент, датчики концевых положений гидродомкрата исполнительного органа и электрогидропереключатель управления исполнительным органом 2.
Однако известное устройство обладает существенными недостатками в условиях неспокойной гипсометрии пласта, подштыбовки конвейера и т. д., весьма часто возникают ситуации, при которых необходимый диапазон регулирования перекрывает
заданный конструктивно диапазон выдвижки управляющих гидродомкратов. В этих случаях органом требуется управлять горной машиной относительно ее продольной оси. Из-за отсутствия такой возможности
«О ухудшается качество отработки рельефа почвы пласта и появляется необходимость ручного вмешательства в процессе управления машиной, что снижает производительность горной машины.
Цель изобретения -улучшение качества
15 управления за счет исключения ручного вмешательства в процессе управления горной машиной при неспокойной гипсометрии пласта, т. е. повышение производительности машины.
Поставленная цель достигается тем, что
2® устройство автоматического управления
снабжено вторыми электронными ключем
и времязадающим элементом, двумя схемами совпадения, схемой ИЛИ, электрогидропереключателем управления гидродомкратами машины и триггером, причем первый вход второго электронного ключа соединен с соответствующим выходом приемного блока, а вторые входы этих электронных ключей подключены к соответствующим датчикам концевых положений гидродомкратов и к первым входам схем совпадения, вторые и третьи входы которых подключены к соответствующим выходам приемнрго блока и триггера, а выходы схем совпадения соединены со входами времязадающих элементов, выходы которых подключены к электрогидропереключателю управления гидродомкратами машины и через схему ИЛИ - к одному из входов триггера, второй вход которого подключен к дыходу приемного блока, который через электронные ключи соединен с электрогидропереключателем управления гидродомкратом исполнительным органом.
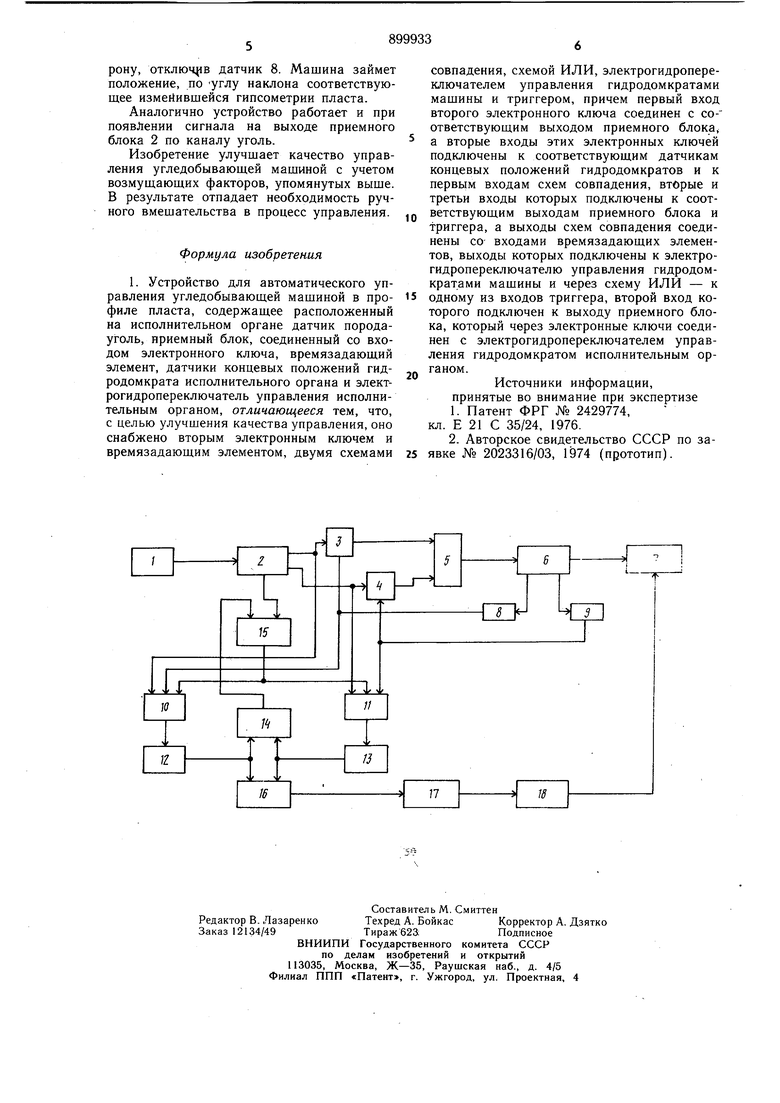
На чертеже представлена функциональная схема устройства.
Устройство содержит датчик 1 породауголь, расположенный на режущем органе комбайна, выходной сигнал которого подается на вход приемного блока 2, электронные ключи 3 и 4, входы которых соединены с соответствующими выходами приемного блока 2 по каналам порода-уголь, а выходы ключей соединены с электрогидропереключателем 5, выход которого соединен с гидродомкратом 6 исполнительного органа 7.
Контроль крайних положений гидродомкрата 6 обеспечивается датчиками 8 и 9 концевых положений выходы которых соединены со входами электронных ключей 3 и 4 и с одним их входов схем 10 и 11 совпадения, выходы последних соединены со входами времязадающих элементов 12 и 13, а их выходы соединены через схему ИЛИ 14 с триггером 15, вход которого соединен с выходом приемного лока 2 и через электрогидропереключатель управления наклоном горной машины 16 относительно продольной оси - с гидродомкратом 17 горной мащины 18.
Устройство автоматического управления угледобывающей мащиной в профиле пласт,а работает следующим образом.
Сигнал с датчика 1 порода-уголь за определенное время (число оборотов щнека) накапливается в приемном блоке 2 и затем сравнивается с заданными уставками регулирования. Если величина суммарного сигнала выходит за пределы зоны нечувствительности, определяемой требуемой толщиной, оставляемой в зоне контакта угольной пачки, то приемный блок 2 выдает синхросигнал на триггер 15, управляющий сигнал по одному из каналов порода-уголь через электронные ключи 3 и 4 на электрогидропереключатель 5 для управления исполнительным органом 7 горной машины 18.
В случае, когда величина суммарного сигнала, накапливаемого в процессе контроля, не выходит за пределы зоны нечувствительности, определяемой требуемой толщиной оставляемой угольной пачки, управляющие сигналы с приемного блока 2 отсутствуют.
Если в процессе , регулирования встречается участок с неспокойной гипсометрией пласта или подщтыбовкой конвейера, когда не хватает диапазона выдвижки гидродомкрата 6 и шток последнего займет одно из крайних положений, срабатывает один из датчиков 8 или 9 концевых положений. Сигнал отдатчика 8 (или 9) поступает на электронные ключи 3 (или 4) и прекращает поступление управляющего воздействия по соответствующему каналу на электрогидропереключатель 5. Этим устраняются холостые включения гидросистемы горной мащины.
Пусть датчик 1 находится на породе. Приемный блок 2 выдает управляющий сигнал по каналу порода-уголь, а гидродомкрат 6 исчерпал ресурс выдвижки, т. е. сработал датчик 8.
При этом, по окончании времени анализа, с выхода приемного блока 2 на триггер 15 подается синхросигнал, триггер 15 срабатывает и на схему совпадения 10 поступят три единичных сигнала: от триггера 15, с приемного блока 2 по каналу порода и датчика 8. Выходной сигнал схемы 10 совпадения поступает на времязадающий элемент 12, в котором вырабатывается импульс длительностью ti, необходимой для наклона корпуса мащины р нужную сторону. Выходной сигнал с времязадающего элемента 12 поступает на электрогидропереключатель 16 и схему ИЛИ 14.
При этом за время ti корпус машины изменит свой угол наклона на величину oti. В связи с изменением угла наклона мащины 18 изменится относительно границы породауголь положение исполнительного органа 7. Это, в свою очередь, приводит к изменению сигнала от датчика 1 порода-уголь. Выходной сигнал с времязадающего элемента 12, пройдя схему ИЛИ 14, переключит триггер 15 в исходное состояние.
Если в ходе следующего цикла анализа приемный блок 2 повторно выдает управляющее воздействие по каналу порода, то описанный цикл управления повторится. Управление наклоном комбайна осуществляется до тех пор, пока сигнал от датчика 1 порода-уголь не войдет в зону нечувствительности приемного блока 2 или не вызовет управляющее воздействие по каналу уголь. В первом случае прекратится поступление сигнала на схему совпадения 10 от приемного блока 2 и исполнительный орган остается в том положении, в которое его привели предыдущие воздействия по углу наклона. Во BtopOM случае сработает электрогидропереключатель 5 по каналу уголь и гидродомкрат 6 переместится в противоположную сторону, отключав датчик 8. Машина займет положение, по -углу наклона соответствующее изменившейся гипсометрии пласта. Аналогично устройство работает и при появлении сигнала на выходе приемного блока 2 по каналу уголь. Изобретение улучшает качество управления угледобывающей машиной с учетом возмущающих факторов, упомянутых выше. В результате отпадает необходимость ручного вмешательства в процесс управления. Формула изобретения 1. Устройство для автоматического управления угледобывающей машиной в профиле пласта, содержащее расположенный на исполнительном органе датчик породауголь, приемный блок, соединенный со входом электронного ключа, времязадающий элемент, датчики концевых положений гидродомкрата исполнительного органа и электрогидропереключатель управления исполнительным органом, отличающееся тем, что, с целью улучшения качества управления, оно снабжено вторым электронным ключем и времязадающим элементом, двумя схемами совпадения, схемой ИЛИ, электрогидропереключателем управления гидродомкратами машины и триггером, причем первый вход второго электронного ключа соединен с соответствующим выходом приемного блока, а вторые входы этих электронных ключей подключены к соответствующим датчикам концевых положений гидродомкратов и к первым входам схем совпадения, вторые и третьи входы которых подключены к соответствуюшим выходам приемного блока и триггера, а выходы схем совпадения соединены со входами времязадающих элементов, выходы которых подключены к электрогидропереключателю управления гидродомкратами машины и через схему ИЛИ - к одному из входов триггера, второй вход которого подключен к выходу приемного блока, который через электронные ключи соединен с электрогидропереключателем управления гидродомкратом исполнительным органом. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ № 2429774, кл. Е 21 С 35/24, 1976. 2.Авторское свидетельство СССР по заявке № 2023316/03, 1974 (прототип).
