Область техники
Настоящее изобретение относится к способу мониторинга функционирования устройства пилотирования воздушного судна, к устройству пилотирования воздушного судна и к воздушному судну, оснащенному устройством пилотирования.
Во всем тексте термин «пилотирование» и его производные обозначают, если не указано иное, управление полетом воздушного судна, по меньшей мере, одним пилотом, управляющим, по меньшей мере, одним органом пилотирования, таким как ручка, рычаг, рычаг ножного управления, педаль и другие элементы, связанные, по меньшей мере, с одним органом управления полетом, таким как руль или двигатель воздушного судна. Термин «органы управления полетом» обозначает любой орган, положение или состояние которого влияет на полет воздушного судна: здесь может идти речь о рулях, двигателях, лопатках ротора и других органах. Термин «управление» и его производные традиционным в авиации образом означают подачу к устройству сигналов, вызывающих определенное действие этого устройства. Термин «осуществлять мониторинг» и его производные традиционным в авиации образом означают обработку измерений, выполняемых на устройстве, и их сравнение с предварительно заданными величинами для выявления дефектов функционирования (то есть дефектов в результате какой-либо неполадки в системе (в устройстве и/или в программных средствах) в противоположность дефектам эксплуатации, которые обусловлены не неполадкой, а ошибкой пользователя (пилота или второго пилота) или выходом воздушного судна из его области полета). Устройство мониторинга функционирования устройства пилотирования является устройством, которое выполняет, по меньшей мере, одну функцию мониторинга для каждого органа пилотирования этого устройства пилотирования и в определенных случаях может выполнять также другие функции.
Уровень техники
Известны устройства пилотирования воздушного судна с электронным управлением полетом, содержащие, по меньшей мере, один орган пилотирования и, по меньшей мере, одну информационную систему (fly-by-wire flight control system - FCS) электронного управления полетом (fly-by-wire flight controls). Такая информационная система предназначена для выполнения вычислений согласно функции предварительно заданной закономерности управления и генерирования сигналов управления для привода в действие приводов органов управления полетом воздушного судна (рулей, двигателей и других органов) согласно функции сигналов, причем эти первичные сигналы, а именно сигналы положения, поставляются датчиками, а именно датчиками положения, связанными с каждым органом пилотирования.
При таком устройстве пилотирования необходимо осуществлять мониторинг функционирования, чтобы выявлять аномалии функционирования внутри устройства пилотирования и генерировать соответствующие сигналы мониторинга, которые могут быть аварийными сигналами и/или сигналами, способными подавлять сигналы управления и/или сигналы, инициирующие модификацию предварительно заданной закономерности управления информационной системы электронного управления полетом.
Это особенно (хотя и не исключительно) относится к случаю, когда устройство пилотирования также снабжено моторами привода в действие каждого органа пилотирования и, по меньшей мере, одним блоком управления (отдельным или не отдельным от информационные системы электронного управления полетом) и способно вырабатывать сигналы управления этими моторами привода в действие, называемыми сигналами силовой обратной связи, таким образом, чтобы генерировать восприятие моделированной силовой обратной связи на органе пилотирования. Такой блок управления может быть, в частности, выполнен с возможностью осуществлять приводимое в действие системой мониторинга (с помощью средств логики и электроники) соединение органов пилотирования, обладающих одинаковыми степенями свободы и связанных с одними и теми же органами управления полетом, - например, ручки управления пилота и ручки управления второго пилота. Таким образом, моторы позволяют моделировать восприятие традиционных механических ручек и обеспечивать следование каждой ручки за другой.
В патентном документе ЕР 0759585 для каждой ручки пилотирования предусмотрены, с одной стороны, мотор для генерирования восприятия силовой обратной связи с полным резервом моторов, датчики выявления и цепи генерирования восприятия силовой обратной связи, и с другой стороны, компьютер управления с силовой обратной связью и отдельный компьютер мониторинга, причем эти компьютеры связаны для «автоматического мониторинга» сигнала управления мотором, связанным с этой ручкой, его сравнения с сигналом тока мотора и сравнения измеренных сигналов напряжения с опорным сигналом, причем компьютер мониторинга осуществляет мониторинг компьютера управления силовой обратной связи, и два компьютера могут выключать мотор. Такое решение, традиционное по своему принципу, тяжеловесно, сложно и дорого в осуществлении и функционировании. В частности, оно требует специфического компьютера мониторинга для каждой ручки, заключенного в электромагнитной коробке, на которой установлена ручка. Оно также требует специфических датчиков положения для мониторинга, отдельных от датчиков положения для управления силовой обратной связи. Кроме того, оно остается несовершенным в отношении того, что определенные неполадки, которые могут случаться в компьютере мониторинга или одновременно в цепи управления силовой обратной связи и цепи мониторинга, находящихся близко друг к другу, не будут выявлены непременным образом. К тому же в этом решении необходимо, чтобы компьютеры мониторинга были продуманы, разработаны, изготовлены и контролировались независимо от компьютеров управления силовой обратной связи и информационных систем электронного управления полетом.
В патентных документах US 2011/0112705 и US 2011/0108673 также предусмотрены специфические блоки управления силовой обратной связи /мониторинга, содержащие двухфункциональные микроконтроллеры, которые также должны быть специально предназначены для осуществления мониторинга независимо от управления силовой обратной связи и которым свойственна, по меньшей мере, часть упомянутых выше недостатков.
В патентном документе US 2012/0053762 описана активная система поперечной ручки и рукоятки («активная установочная система»), содержащая виртуальную модель в реальном времени, моделирующую, по меньшей мере, одну составляющую системы, что позволяет вычислять некоторые переменные состояния, такие как величина сил, на основе других имеющихся первоначально переменных и содержит функцию мониторинга системы. Эта функция мониторинга, выполняемая блоком управления устройства пилотирования, обладает теми же недостатками, которые были упомянуты выше.
В патентном документе US 2005/0080495 также описано устройство пилотирования, содержащее активные органы пилотирования. В документе описана также информационная система электронного управления полетом и указано, что можно использовать желаемую траекторию органа пилотирования, генерируемую генератором траектории, в качестве сигнала управления полетом. В документе также упомянуто, что может быть предусмотрено устройство мониторинга для выявления дефектного органа пилотирования, например, путем сравнения желаемой траектории и измеряемой действительной траектории этого органа пилотирования. Таким образом, данное устройство мониторинга обладает теми же упомянутыми выше недостатками.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы устранить эти недостатки и предложить способ мониторинга функционирования, который обеспечивает высокую стойкость к собственным сбоям, полностью независим от органов пилотирования, мониторинг которых он выполняет, и при необходимости, осуществляет управление силовой обратной связи, при этом он имеет более низкую стоимость разработки, менее сложен и позволяет снизить массу устройства пилотирования.
Задача изобретения состоит также в том, чтобы предложить устройство пилотирования и воздушное судно, обладающие теми же преимуществами.
Соответственно, изобретение относится к способу мониторинга функционирования устройства пилотирования воздушного судна, содержащего:
- по меньшей мере, один орган пилотирования,
- по меньшей мере, одну информационную систему электронного управления полетом, выполненную с возможностью генерировать, согласно функции заданных закономерностей управления, сигналы управления приводами органов управления полетом воздушного судна согласно функции по меньшей мере, сигналов, называемых первичными сигналами, поставляемых датчиками, связанными с каждым органом пилотирования,
причем способ мониторинга функционирования предназначен для выявления аномалий функционирования внутри устройства пилотирования и генерирования соответствующих сигналов мониторинга и содержит этапы, заключающиеся в следующем:
- на основе, по меньшей мере, части сигналов, поставляемых датчиками, связанными с каждым органом пилотирования и в соответствии с предварительно заданной закономерностью вычисления вычисляют, по меньшей мере, одну теоретическую величину, по меньшей мере, одного параметра функционирования, называемого отслеживаемым параметром, по меньшей мере, одного органа пилотирования,
- для каждого отслеживаемого параметра сравнивают каждую теоретическую величину с сигналами измерения, поставляемыми датчиками, связанными, по меньшей мере, с одним органом пилотирования,
- выбирают действие мониторинга согласно функции разности между каждой теоретической величиной и сигналами измерения,
отличающемуся тем, что эту, по меньшей мере, одну теоретическую величину вычисляют на основе, по меньшей мере, части первичных сигналов, при этом способ выполняют с помощью, по меньшей мере, одного модуля мониторинга, интегрированного в информационной системе электронного управления полетом.
Изобретение относится также к устройству пилотирования воздушного судна, содержащему:
- по меньшей мере, один орган пилотирования,
- по меньшей мере, одну информационную систему электронного управления полетом, предназначенную для генерирования, согласно функции предварительно заданной закономерности управления, сигналов управления приводами органов управления полетом воздушного судна, согласно функции, по меньшей мере, сигналов, называемых первичными сигналами, поставляемых датчиками, связанными с каждым органом пилотирования,
- по меньшей мере, один модуль мониторинга функционирования устройства пилотирования, предназначенный для выявления аномалий функционирования внутри устройства пилотирования и генерирования соответствующих сигналов мониторинга и выполненный с возможностью:
- на основе сигналов, поставляемых датчиками, связанными с каждым органом пилотирования и в соответствии, по меньшей мере, с одной предварительно заданной закономерностью вычисления вычислять, по меньшей мере, одну теоретическую величину, по меньшей мере, одного параметра функционирования, называемого отслеживаемым параметром, по меньшей мере, одного органа пилотирования,
- для каждого отслеживаемого параметра сравнивать каждую теоретическую величину с сигналами измерения, поставляемыми датчиками, связанными, по меньшей мере, с одним органом пилотирования,
- выбирать действие мониторинга, - а именно генерировать сигналы мониторинга согласно функции разности между каждой теоретической величиной и сигналами измерения,
отличающемуся тем, что указанный, по меньшей мере, один модуль мониторинга интегрирован в информационной системе электронного управления полетом, причем этот, по меньшей мере, один модуль мониторинга выполнен с возможностью вычисления, по меньшей мере, одной теоретической величины на основе первичных сигналов.
Изобретение относится также к воздушному судну, оснащенному устройством пилотирования по изобретению.
В соответствии с изобретением было установлено, что можно осуществлять мониторинг функционирования устройства пилотирования посредством простого дополнительного программирования, по меньшей мере, одной информационной системы электронного управления полетом (FCS) и без необходимости введения дополнительных специфических датчиков, - а именно датчиков положения и/или датчиков сил, - предназначенных для этого мониторинга. В противоположность тому, что считалось до сих пор, на практике решение дает в результате лучшую надежность функционирования мониторинга, который становится независимым от органов пилотирования и от их электромеханических монтажных коробок. Кроме того, этот мониторинг получает преимущества надежности и резерва, уже предусмотренных в информационных системах электронного управления полетом.
В частности, в способе и устройстве по изобретению этот, по меньшей мере, один модуль выполнен в виде, по меньшей мере, одного центрального информационного блока информационной системы электронного управления полетом, предназначенного для генерирования согласно функции заданных закономерностей управления, сигналов управления приводами органов управления полетом воздушного судна, согласно функции, по меньшей мере, первичных сигналов, а не в виде центрального блока управления устройства пилотирования и/или устройства, генерирующего активную силовую обратную связь, по меньшей мере, в одном органе пилотирования.
В частности, в устройстве пилотирования каждый орган пилотирования установлен на электромеханической коробке и поддерживается ею. Предпочтительно и в соответствии с изобретением каждый центральный информационный блок информационной системы электронного управления полетом, выполняющий функцию модуля мониторинга по изобретению, расположен снаружи каждой электромагнитной коробки каждого органа пилотирования, он генерирует сигналы мониторинга снаружи каждой электромагнитной коробки каждого органа пилотирования и подает эти сигналы на вход каждой электромагнитной коробки каждого органа пилотирования.
Различные параметры функционирования могут быть выбраны в качестве отслеживаемого параметра. В частности, предпочтительно и в соответствии с изобретением, когда устройство пилотирования снабжено электромоторами привода в действие, в качестве отслеживаемого параметра используют, по меньшей мере, один параметр, отличный от электрического тока питания такого мотора привода в действие. Результатом является, в частности, более надежный мониторинг, так как величина тока питания моторов может изменяться по другим причинам, чем аномалии функционирования, и наоборот, некоторые аномалии функционирования не обязательно выражаются в модификации величины тока питания моторов.
Кроме того, изобретение позволяет реализовать любой тип мониторинга различных органов пилотирования, то есть, в частности, прямой мониторинг (первичные сигналы, теоретические величины, отслеживаемые параметры одного и того же органа пилотирования) и/или перекрестный мониторинг (первичные сигналы, поставляемые датчиками, связанными с первым органом пилотирования и/или с первой степенью свободы органа пилотирования, тогда как теоретические величины и отслеживаемые параметры относятся к другому органу пилотирования и/или ко второй степени свободы органа пилотирования).
Далее, сигналы измерения могут быть сигналами измерения отслеживаемого параметра или параметров, поставляемыми датчиками этого отслеживаемого параметра или параметров, или, в отличие от этого, могут быть сигналами измерения другого параметра, отличного от отслеживаемого параметра, при этом, по меньшей мере, одна теоретическая величина отслеживаемого параметра вычисляется на основе сигналов измерения, по меньшей мере, одного другого параметра, отличного от отслеживаемого параметра.
Предпочтительно и в соответствии с изобретением, по меньшей мере, один отслеживаемый параметр, по меньшей мере, одного органа пилотирования является параметром, отличным от положения органа пилотирования. Кроме того, предпочтительно и в соответствии с изобретением для каждой теоретической величины отслеживаемого параметра эти сигналы измерения, сравниваемые с данной теоретической величиной, являются сигналами измерения одного и того же отслеживаемого параметра, - а именно, отслеживаемого параметра одного и того же органа пилотирования. Противоположным образом, предпочтительно и в соответствии с изобретением эти первичные сигналы, используемые для вычисления, по меньшей мере, одной теоретической величины отслеживаемого параметра, являются сигналами, поставляемыми датчиками, измеряющими другой параметр, отличный от отслеживаемого параметра. Предпочтительно и в соответствии с изобретением эти первичные сигналы содержат сигналы положения, по меньшей мере, одного органа пилотирования, а, по меньшей мере, один отслеживаемый параметр является параметром, отличным от положения этого органа пилотирования. Возможны также любые другие варианты.
В частности, предпочтительно и в соответствии с изобретением, по меньшей мере, один отслеживаемый параметр выбирают из следующего: положение органа пилотирования и сил, приложенных к органу пилотирования.
Таким образом, и в соответствии с изобретением модуль мониторинга выполнен с возможностью:
- получать первичные сигналы положения и/или сил каждого органа пилотирования устройства пилотирования, поставляемые информационной системе электронного управления полетом датчиками положения и/или датчиками сил, связанными с каждым органом пилотирования,
- на основе первичных сигналов положения и/или сил и в соответствии, по меньшей мере, с одной предварительно заданной закономерностью вычисления вычислять, по меньшей мере, одну теоретическую величину положения, по меньшей мере, одного органа пилотирования и/или, по меньшей мере, одну теоретическую величину сил, приложенных, по меньшей мере, к одному органу пилотирования,
- получать сигналы измерения, поставляемые датчиками положения, связанными, по меньшей мере, с одним органом пилотирования (который может быть тем же самым или отличным от того, для которого вычисляется теоретическая величина), представляющие положение этого органа пилотирования, и/или датчиками сил, связанными, по меньшей мере, с одним органом пилотирования, представляющими силы, приложенные к данному органу пилотирования,
- сравнивать каждую теоретическую величину с сигналами измерения таким образом, чтобы иметь возможность выявлять аномалии функционирования внутри устройства пилотирования и выбирать действие мониторинга, - а именно, генерировать соответствующие сигналы мониторинга.
В частности способ по изобретению отличается тем, что указанные первичные сигналы содержат сигналы положения, поставляемые датчиками положения, связанными с органом пилотирования, а силы, приложенные к органу пилотирования, используют в качестве отслеживаемого параметра, причем, по меньшей мере, одну теоретическую величину статических сил вычисляют с помощью модуля мониторинга согласно функции предварительно заданной закономерности вычисления, связывающей положение с силой, и/или, по меньшей мере, одну теоретическую величину сил демпфирования вычисляют с помощью модуля мониторинга согласно функции предварительно заданной закономерности вычисления, связывающей изменение положения по времени с силой, и/или, по меньшей мере, одну теоретическую величину сил инерции вычисляют с помощью модуля мониторинга согласно функции предварительно заданной закономерности вычисления, связывающей второе изменение положения по времени с силой. В особо предпочтительном примере осуществления изобретения, по меньшей мере, одну теоретическую величину сил, которая является алгебраической суммой теоретических величин статических сил, сил демпфирования и инерции, вычисляют с помощью модуля мониторинга. При этом, предпочтительно и в соответствии с изобретением функцию передачи второго порядка, используют для выработки сигнала ошибки согласно функции разности между каждой теоретической величиной и сигналами измерения.
Изобретение особенно (хотя и не исключительно) применимо к устройству пилотирования, называемому активным, то есть к устройству, в котором, по меньшей мере, один орган пилотирования связан, по меньшей мере, с одним приводом, выполненным с возможностью генерирования восприятия моделированных сил, позволяющим вырабатывать силовую обратную связь в органе пилотирования, механически связанном с органом управления полетом воздушного судна, и/или соединять два органа пилотирования (пилота и второго пилота), воздействующих на одни и те же органы управления полетом.
Таким образом, предпочтительно устройство пилотирования по изобретению отличается также тем, что содержит, по меньшей мере, один мотор привода в действие, по меньшей мере, одного органа пилотирования и, по меньшей мере, один блок управления, выполненный с возможностью вырабатывать сигналы, называемые сигналами силовой обратной связи, для управления каждым мотором привода в действие, таким образом, чтобы генерировать восприятие моделированной силовой обратной связи на органе пилотирования. Предпочтительно и в соответствии с изобретением этот, по меньшей мере, один модуль мониторинга выполнен в виде центрального информационного блока информационной системы электронного управления полетом, то есть блока управления, отдельного от, по меньшей мере, одного блока управления силовой обратной связи.
Кроме того, предпочтительно устройство пилотирования по изобретению содержит, по меньшей мере, два подвижных органа пилотирования с одинаковыми степенями свободы, связанных посредством, по меньшей мере, одной информационной системы электронного управления полетом с одними и теми же органами управления полетом воздушного судна и соединенных друг с другом посредством блока управления силовой обратной связи. Этот блок управления может быть или не быть, по меньшей мере, частично образован одной или каждой информационной системой электронного управления полетом.
Далее, предпочтительно и в соответствии с изобретением, по меньшей мере, один модуль мониторинга выполнен с возможностью вырабатывать сигналы мониторинга, замедляющие, по меньшей мере, один мотор привода в действие силовой обратной связи, а именно подавлять эти сигналы силовой обратной связи и/или прекращать электропитание, по меньшей мере, одного мотора привода в действие силовой обратной связи, - когда разность между каждой теоретической величиной и сигналами измерения превышает абсолютную величину предварительно определенной пороговой величины, соответствующей аномалии функционирования.
Краткий перечень чертежей
Другие задачи, особенности и преимущества изобретения будут ясны из последующего, не имеющего ограничительного характера описания со ссылками на прилагаемые чертежи. На чертежах:
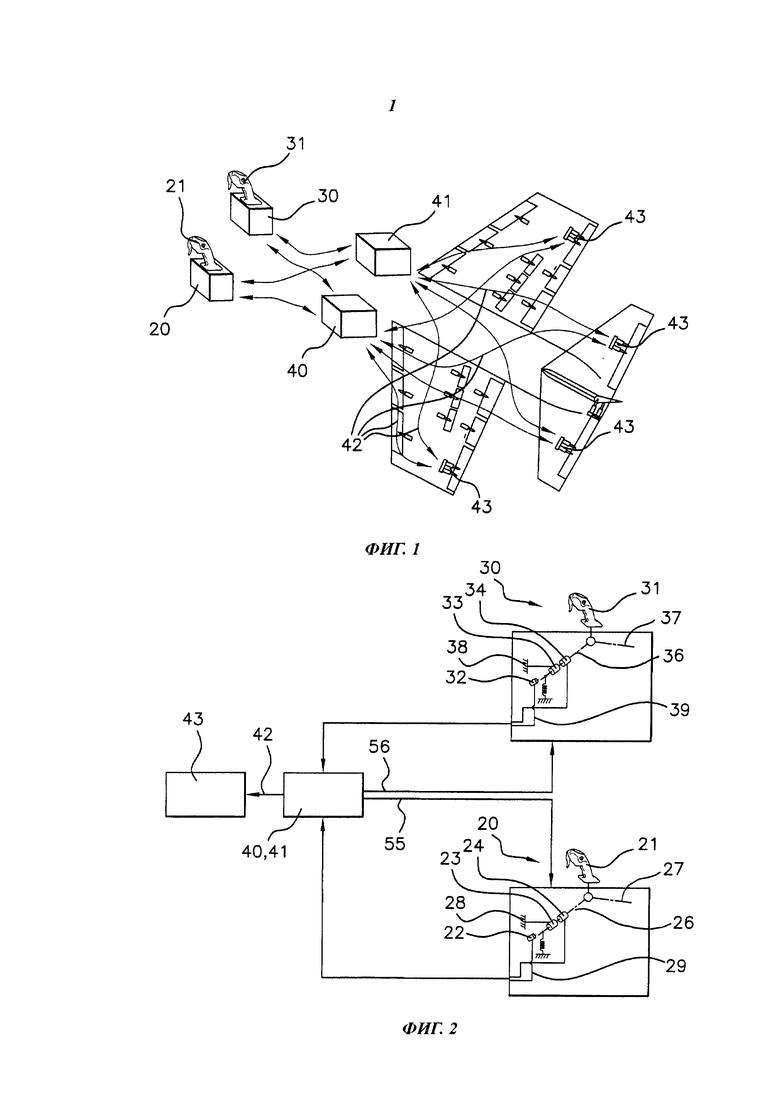
фиг. 1 схематично изображает устройство пилотирования в соответствии с изобретением,
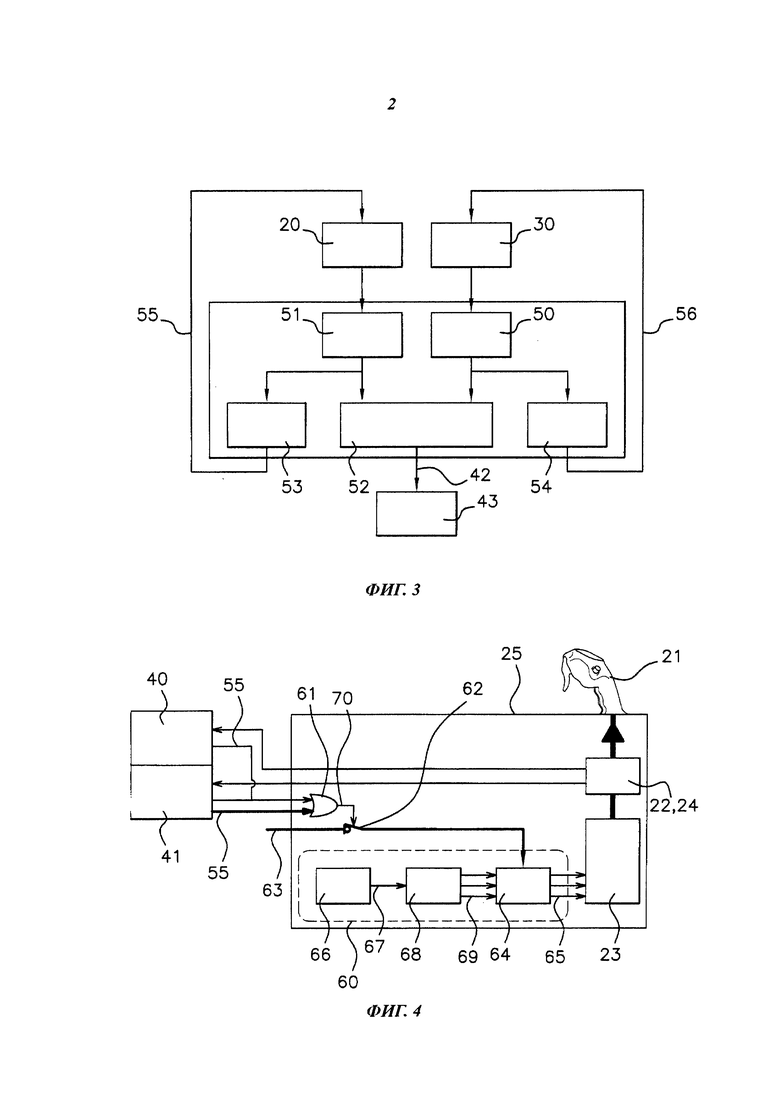
фиг. 2 изображает общую блок-схему устройства пилотирования по изобретению, выполняющего способ мониторинга в соответствии с изобретением,
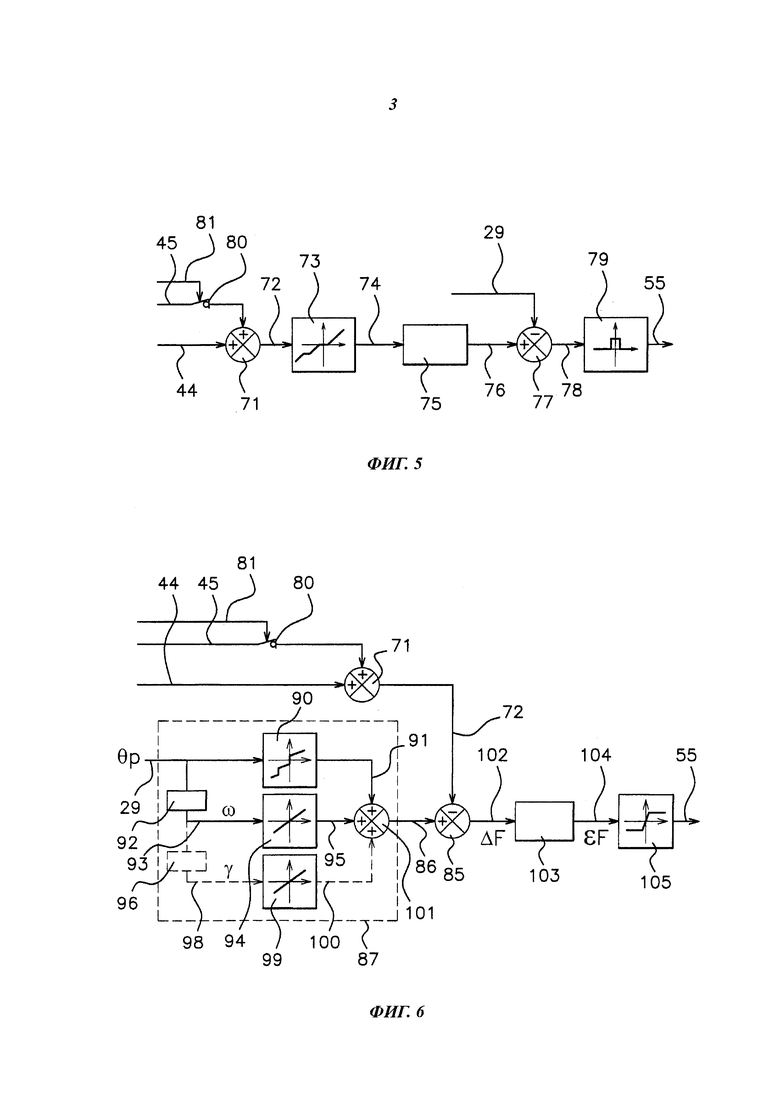
фиг. 3 изображает общую блок-схему информационной системы электронного управления полетом устройства пилотирования по изобретению, выполняющей способ мониторинга в соответствии с изобретением,
фиг. 4 изображает общую функциональную блок-схему примера выполнения устройства пилотирования по изобретению, отслеживаемого способом мониторинга в соответствии с изобретением,
фиг. 5 изображает общую функциональную блок-схему первого примера алгоритма мониторинга, который может выполняться информационной системой электронного управления полетом устройства пилотирования по изобретению в способе в соответствии с изобретением,
фиг. 6 изображает общую функциональную блок-схему второго примера алгоритма мониторинга, который может выполняться информационной системой электронного управления полетом устройства пилотирования по изобретению в способе в соответствии с изобретением.
Осуществление изобретения
Показанное на фиг. 1 устройство пилотирования содержит в данном примере выполнения два органа 20, 30 пилотирования, позволяющих осуществлять пилотирование самолета по тангажу и по крену, при этом каждый орган образован мини-ручкой на электромеханической коробке 25, которая позволяет преобразовывать механическое направление и поворотное перемещение каждой мини-ручки вокруг оси, соответственно 26 и 36, управления тангажом и оси, соответственно 27 и 37, управления креном. Каждая мини-ручка содержит рукоятку, соответственно 21 и 31, маневрирования, которая предназначена для манипулирования пилотом (и, соответственно, вторым пилотом). Эти рукоятки маневрирования установлены и направляются с возможностью поворота относительно опоры, соответственно 28 и 38, коробки 25, 35 вокруг двух осей, соответственно 26, 27 и 36, 37, которые перпендикулярны друг другу и в целом, по меньшей мере, пересекаются (образуя связь в центральной точке).
В этом примере выполнения устройства пилотирования прилагаемые силы являются силами поворота, поэтому здесь для их обозначения используется термин крутящего момента, что не следует толковать в качестве ограничения, так как, например, в случае ручек линейного перемещения прилагаемая сила является силой по направлению оси перемещения ручки.
Мини-ручка 20, предназначенная для пилота (командира судна), содержит последовательно на оси 26 тангажа датчик 24 крутящего момента, предназначенный для подачи измеренных сигналов 44 сил, представляющих величину сил, в данном случае крутящего момента Fp, прилагаемого пилотом к рукоятке 21 маневрирования. Датчик 24 крутящего момента связан, с одной стороны, с рукояткой 21 маневрирования и, с другой стороны, по меньшей мере, с одним электромотором 23, способным передавать крутящий момент на рукоятку 21 маневрирования вокруг оси 26 тангажа. Электромотор 23 может, например, содержать ротор, соединенный с рукояткой 21 маневрирования для ее поворота вокруг оси 26 тангажа, и статор, жестко укрепленный на корпусе 28 коробки 25 органа пилотирования. Датчик 22 положения также установлен последовательно на оси 26 тангажа и позволяет подавать сигналы 29 положения, представляющие угловое положение θр рукоятки 21 маневрирования на этой оси 26. Само собой разумеется, что каждая ось 26, 27 мини-ручки может также содержать «пассивные» элементы, такие как пружины или демпферы, связанные с корпусом 28.
Симметричным образом предназначенная для второго пилота мини-ручка 30 содержит рукоятку 31 маневрирования, датчик 34 крутящего момента, подающий сигналы 45 измеренных сил, представляющих величину крутящего момента Fcp, прилагаемого вторым пилотом к этой рукоятке 21 маневрирования, по меньшей мере, один электромотор 33, способный вызывать поворот рукоятки 31 маневрирования вокруг оси 36 тангажа относительно корпуса 38 коробки, и датчик 32 положения, подающий сигналы 39 положения, представляющие угловое положение 9 ср рукоятки 31 маневрирования второго пилота вокруг оси 36 тангажа.
В примере выполнения по фиг. 2 показаны только датчики и моторы, относящиеся к оси 26, 36 тангажа каждого органа пилотирования с учетом того, что оси 27, 37 бортового крена также снабжены подобными датчиками и моторами. Кроме того, следует отметить, что различные датчики и моторы обычно дублированы на каждой оси в качестве резерва.
Показанное устройство пилотирования содержит также две информационные системы 40, 41 электронного управления полетом, генерирующие, согласно функции предварительно заданной закономерности управления, сигналы 42 управления приводами 43 органов управления тангажом и креном воздушного судна согласно функции первичных сигналов 29, 39 положения, поставляемых датчиками 22, 32 положения, связанными с каждой мини-ручкой 20, 30. Каждая информационная система 40, 41 электронного управления полетом связана с двумя мини-ручками 20, 30 для получения первичных сигналов 29, 39, 44, 45, поставляемых различными датчиками и, при необходимости, для выдачи сигналов управления моторами 23, 33 на каждой оси каждой мини-ручки 20, 30.
В устройстве пилотирования в соответствии с изобретением каждая информационная система 40, 41 электронного управления полетом содержит помимо модуля 50, 51 обработки первичных сигналов 29, 39, 44, 45, получаемых от датчиков двух мини-ручек 20, 30, и основного модуля 52, вырабатывающего сигналы 42 управления приводами 43 органов управления, по меньшей мере, один модуль 53 мониторинга мини-ручки 20 пилота, обрабатывающий сигналы 55 мониторинга функционирования мини-ручки 20, и, по меньшей мере, один модуль 54 мониторинга мини-ручки 30 второго пилота, обрабатывающий сигналы 56 мониторинга функционирования мини-ручки 30.
На фиг. 4 показан более подробно пример осуществление способа и устройства мониторинга функционирования мини-ручки 20 пилота, при этом такой же способ и такое же устройство дублированы для мониторинга функционирования мини-ручки 30 второго пилота.
Как видно на фиг. 4, в электромеханической коробке 25 помещен блок 60 управления каждым мотором 23 обратной связи, причем этот блок 60 управления поставляет сигналы, называемые сигналами 65 силовой обратной связи, электропитания каждого мотора 23 силовой обратной связи. Блок 60 управления включает в себя, в частности, логический блок 66 автоматического управления, получающий сигналы 44 сил, поставляемые датчиками 24 сил, и, в случае необходимости, сигналы 29, поставляемые датчиками 22 положения, при этом логический блок 66 автоматического управления подает сигнал 67 заданных сил в логическую цепь 68, вырабатывающую логические сигналы 69 управления моторами 23 обратной связи, которые подаются на вход силовой цепи 64, подающей сигналы 65 электропитания моторов 23 обратной связи.
Сигналы 55 мониторинга мини-ручки 20 пилота, выработанные двумя информационными системами 40, 41 электронного управления полетом, подаются в электромеханическую коробку 25 на логический вентиль 61 «ИЛИ», выход которого управляет выключателем 62, установленным последовательно в линии 63 электропитания силовой цепи 64, питающей каждый мотор 23 обратной связи. Каждый модуль 53 мониторинга выполнен с возможностью подачи сигналов 55 мониторинга, подавляющих сигналы 65 питания моторов 23 обратной связи в зависимости от результатов сравнения, по меньшей мере, одной теоретической величины, по меньшей мере, одного отслеживаемого параметра органа пилотирования с сигналами измерений, поставляемыми датчиками, связанными, по меньшей мере, с одним из органов пилотирования.
Выбор каждой теоретической величины, сигналов измерения и логики сравнения сделан таким, чтобы обеспечивать возможность выявления дефекта функционирования органа пилотирования на одной и/или другой оси 26, 27 этого органа пилотирования.
На фиг. 5 и 6 показаны два примера осуществления (которые могут одновременно осуществляться одним и тем же модулем мониторинга) логики сравнения, которые могут осуществляться модулем 53 мониторинга мини-ручки 20 пилота на одной из осей, то есть на оси 26 тангажа и оси 27 крена, называемой отслеживаемой осью.
В первом варианте по фиг. 5, в котором производится мониторинг положения, сигналы 44 сил, поставляемые датчиками 24 сил мини-ручки 20 пилота для отслеживаемой оси, и сигналы 34 сил мини-ручки 30 второго пилота для отслеживаемой оси подаются на сумматор 71, который комбинирует эти сигналы для подачи сигналов 72 измеренных сил на вход логического модуля 73, который применяет заданную закономерность управления, записанную в памяти системы 40 электронного управления полетом, связывая силы, прилагаемые к рукоятке 21 мини-ручки 20 с теоретическим положением поворота этой рукоятки 21 вокруг отслеживаемой оси.
Последовательно установленный выключатель 80, управляемый сигналом 81 соединения двух мини-ручек 20, 30, позволяет в своем открытом состоянии разъединять две мини-ручки, и только сигналы 44 сил от мини-ручки 20 пилота используются для мониторинга этой мини-ручки 20. Когда выключатель 80 замкнут, сигналы 44, 45 сил, измеренные для двух мини-ручек 20, 30 используются в логике мониторинга. Сигнал 81 соединения вырабатывается и поставляется системой электронного управления полетом.
Таким образом, логический модуль 73 поставляет сигналы 74 теоретического положения рукоятки при повороте вокруг отслеживаемой оси. Эти сигналы 74 теоретического положения подаются на вход модуля 75 регулирования, применяющего функцию передачи, представляющую механическую реакцию органа пилотирования, в частности, его демпфирование и его инерцию (которые запрограммированы в органе пилотирования), которые на практике могут быть функцией передачи второго порядка, представляющей систему инерция-пружина-демпфер. Модуль 75 регулирования поставляет сигнал 76 заданного соответствующего углового положения. Этот сигнал 76 заданного положения сравнивается блоком 77 сравнения с сигналами 29 положения, поставляемыми датчиками 22 положения, при этом блок 77 сравнения определяет разность Δθ между сигналами 76, 29 для выдачи сигналов 78, представляющих эту разность Δθ, на вход блока 79 сравнения, который выдает сигналы 55 мониторинга согласно функции абсолютной величины ⎪Δθ⎪ разности.
Если эта абсолютная величина ⎪Δθ⎪ превышает записанную в памяти заданную предельную величину, сигнал 55 мониторинга помещается на верхний уровень для размыкания выключателя 62 и прекращения электропитания 63 силовой цепи 64 моторов 23 обратной связи. Таким образом, моторы обратной связи больше не получают питания.
Если абсолютная величина ниже записанной в памяти предварительно определенной предельной величины, сигнал 55 мониторинга помещается ни нижний уровень, а именно по существу нулевой, так что выключатель 62 остается замкнутым и силовая цепь 64 получает электропитание 63. При этом моторы 23 обратной связи работают. Само собой разумеется, что в блоке 79 сравнения может использоваться логика, обратная вышеописанной.
В варианте выполнения по фиг. 6, в котором производится мониторинг сил, сигнал 72 измерения сил, поставляемый сумматором 71, подается на отрицательный вход блока 85 сравнения, который получает на положительный вход сигналы 86 теоретических сил, вырабатываемые логическим модулем 87. Логический модуль 87 получает на входе сигналы 29 положения θр от датчиков 22 углового положения мини-ручки 20. Эти сигналы 29 положения передаются на первую справочную таблицу 90, предназначенную для применения записанной в памяти предварительно заданной закономерности, связывающей угловое положение рукоятки 21 с силой, приложенной к этой рукоятке, чтобы получить первую величину 91 теоретической статической силы, как функции положения θр.
При этом сигналы 29 положения θр дифференцируются по времени в первом блоке 92 дифференцирования для подачи сигналов 93 скорости, соответствующих скорости ω углового перемещения рукоятки 21. Эти сигналы 93 скорости передаются на вторую справочную таблицу 94, предназначенную для применения записанной в памяти предварительно заданной закономерности, связывающей угловую скорость с силой, приложенной к рукоятке 21, чтобы получить вторую величину 95 теоретической силы демпфирования согласно функции скорости ω перемещения рукоятки 21.
Таким же образом сигналы 93 угловой скорости подаются предпочтительно во второй блок 96 дифференцирования, поставляющий сигналы 98 ускорения, представляющие угловое ускорение рукоятки 21. Эти сигналы 98 ускорения передаются на вход третьей справочной таблицы 99, предназначенной для применения записанной в памяти предварительно заданной закономерности, связывающей угловое ускорение γ с силой, приложенной к рукоятке 21, чтобы получить третью величину 100 теоретической силы, соответствующей инерции рукоятки 21 маневрирования.
Затем эти три величины 91, 95, 100 теоретических сил суммируются в сумматоре 101 для получения сигналов 86, представляющих совокупность теоретических сил, приложенных к рукоятке 21.
Выход блока 85 сравнения выдает сигналы 102, представляющие разность ΔF между сигналами 72 измеренных сил и сигналами 86 теоретических сил. Эти сигналы 102, представляющие разность ΔF сил, подаются на вход модуля 103 регулирования, применяющего функцию передачи, представляющую динамику обратной реакции на усилие органа пилотирования, которая на практике может быть функцией передачи второго порядка. Модуль 103 регулирования поставляет сигналы 104, представляющие ошибку εF сил. Эти сигналы 104 ошибки сил подаются на блок 105 сравнения, который выдает сигналы 55 мониторинга согласно функции абсолютной величины ⎪εF⎪ ошибки сил.
Если эта абсолютная величина ⎪εF⎪ ошибки сил превышает записанный в памяти заданный порог, сигнал 55 мониторинга помещается на верхний уровень для размыкания выключателя 62 и прекращения электропитания 63 силовой цепи 64 моторов 23 обратной связи. Таким образом, моторы обратной связи больше не получают питания.
Если абсолютная величина ⎪εF⎪ ошибки сил ниже записанного в памяти заданного порога, сигнал 55 мониторинга помещается на нижний уровень, а именно по существу нулевой, так что выключатель 62 остается замкнутым и силовая цепь 64 получает электропитание 63. При этом моторы 23 обратной связи работают. Само собой разумеется, что может использоваться логика, обратная вышеописанной.
Изобретение может быть осуществлено во множестве вариантов выполнения решений, описанных выше и показанных на чертежах. В частности, в логических цепях могут использоваться различные закономерности, а справочные таблицы могут составлять предмет множества вариантов. Заложенная в различных модулях и блоках сравнения логика может быть более сложной и/или может быть полностью или частично заменена эквивалентной логикой. Кроме того, сама используемая логика мониторинга может быть предметом множества вариантов. Этот мониторинг может быть прямым мониторингом, полностью или частично перекрестным для множества органов пилотирования и/или для множества осей или степеней свободы, с более или менее сложной автоматизацией и регулированием, по разомкнутому и/или замкнутому контуру. Вместо генерирования сигналов мониторинга избирательное воздействие мониторинга может выражаться в прерывании и установлении электропитания моторов воздействия, когда они снабжены информационной системой электронного управления полетом. Изобретение может находить самое различное применение, для других органов пилотирования, отличных от мини-ручек, например, для рычагов педального управления при полете воздушного судна змейкой или для управления газом.
Изобретение относится к способу мониторинга устройства пилотирования воздушного судна, содержащего орган пилотирования и информационную систему электронного управления полетом. Модуль мониторинга интегрирован в информационную систему и выполнен с возможностью вычисления на основе первичных сигналов, вырабатываемых датчиками, связанными с органом пилотирования, теоретической величины отслеживаемого параметра органа пилотирования, сравнения каждой теоретической величины с сигналами измерения каждого отслеживаемого параметра и выбора действия мониторинга, а именно генерирования сигналов мониторинга согласно функции разности между каждой теоретической величиной и сигналами измерения. 3 н. и 11 з.п. ф-лы, 6 ил.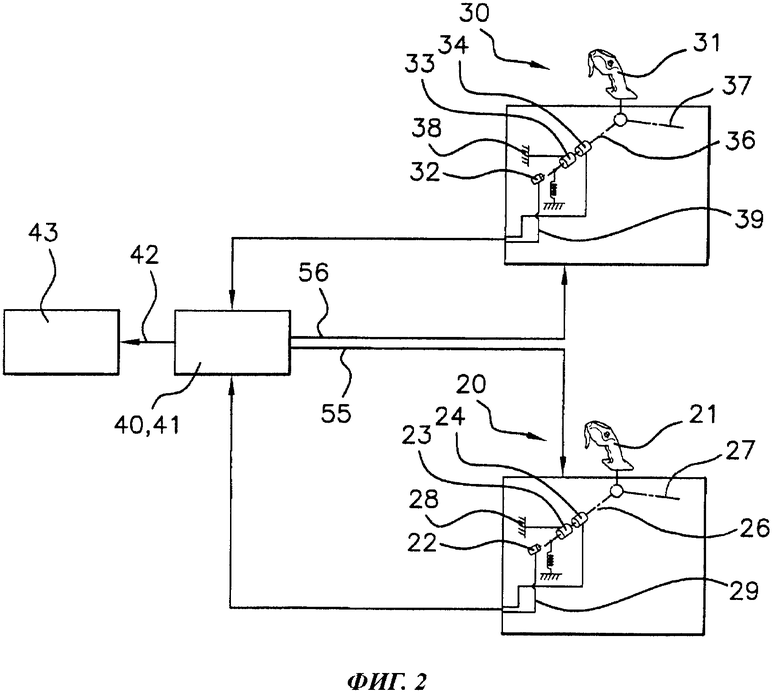
1. Способ мониторинга функционирования устройства пилотирования воздушного судна, содержащего:
по меньшей мере один орган (20, 30) пилотирования,
по меньшей мере одну информационную систему (40, 41) электронного управления полетом, выполненную с возможностью генерировать согласно функции заданных закономерностей управления сигналы управления приводами (23, 33) органов управления полетом воздушного судна согласно функции, по меньшей мере, сигналов, называемых первичными сигналами, поставляемых датчиками, связанными с каждым органом пилотирования,
указанный способ мониторинга функционирования предназначен для выявления аномалий функционирования внутри указанного устройства пилотирования и генерирования соответствующих сигналов (55, 56) мониторинга и содержит следующие этапы:
на основе по меньшей мере части сигналов, поставляемых датчиками, связанными с каждым органом пилотирования и в соответствии с предварительно заданной закономерностью вычисления вычисляют по меньшей мере одну теоретическую величину по меньшей мере одного параметра функционирования, называемого отслеживаемым параметром по меньшей мере одного органа (20, 30) пилотирования,
для каждого отслеживаемого параметра сравнивают каждую теоретическую величину с сигналами измерения, поставляемыми датчиками, связанными по меньшей мере с одним органом пилотирования,
выбирают действие мониторинга как функцию разности между каждой теоретической величиной и сигналами измерения,
отличающийся тем, что указанную по меньшей мере одну теоретическую величину вычисляют на основе по меньшей мере части указанных первичных сигналов, при этом способ выполняют с помощью по меньшей мере одного модуля (53, 54) мониторинга, интегрированного в информационной системе (40, 41) электронного управления полетом.
2. Способ по п. 1, отличающийся тем, что по меньшей мере один отслеживаемый параметр выбирают из следующего: положения органа (20, 30) пилотирования и сил, приложенных к органу (20, 30) пилотирования.
3. Способ по п. 2, отличающийся тем, что указанные первичные сигналы содержат сигналы положения, поставляемые датчиками (22, 32) положения, связанными с указанным органом пилотирования, а силы, приложенные к органу пилотирования, используют в качестве отслеживаемого параметра, причем по меньшей мере одну теоретическую величину статических сил вычисляют с помощью модуля (53, 54) мониторинга как функцию предварительно заданной закономерности вычисления, связывающей положение с силой.
4. Способ по п. 2 или 3, отличающийся тем, что первичные сигналы содержат сигналы положения, поставляемые датчиками (22, 32) положения, связанными с указанным органом пилотирования, а силы, приложенные к органу пилотирования, используют в качестве отслеживаемого параметра, причем по меньшей мере одну теоретическую величину сил демпфирования вычисляют с помощью модуля (53, 54) мониторинга согласно функции предварительно заданной закономерности вычисления, связывающей производную положения по времени с силой.
5. Способ по любому из пп. 2 или 3, отличающийся тем, что первичные сигналы содержат сигналы положения, поставляемые датчиками (22, 32) положения, связанными с органом пилотирования, а силы, приложенные к органу пилотирования, используют в качестве отслеживаемого параметра, причем по меньшей мере одну теоретическую величину сил инерции вычисляют с помощью модуля (53, 54) мониторинга согласно функции предварительно заданной закономерности вычисления, связывающей вторую производную положения по времени с силой.
6. Способ по п. 3, отличающийся тем, что, по меньшей мере, одну теоретическую величину сил, которая является алгебраической суммой теоретических величин статических сил, сил демпфирования и инерции, вычисляют с помощью модуля (53, 54) мониторинга.
7. Способ по любому из пп. 1-3, отличающийся тем, что устройство пилотирования содержит по меньшей мере один мотор (23, 33) привода в действие по меньшей мере одного органа пилотирования и по меньшей мере один блок (60) управления, выполненный с возможностью вырабатывать сигналы, называемые сигналами силовой обратной связи, для управления каждым мотором привода в действие, способные генерировать восприятие моделированной силовой обратной связи на органе пилотирования, причем модуль (53, 54) мониторинга выполнен в виде по меньшей мере одного центрального информационного блока информационной системы электронного управления полетом, отдельного по меньшей мере от одного блока управления, при этом модуль (53, 54) мониторинга выполнен с возможностью замедлять по меньшей мере один мотор привода в действие силовой обратной связи, когда разность между каждой теоретической величиной и сигналами измерения превышает абсолютную величину предварительно определенной пороговой величины, соответствующей аномалии функционирования.
8. Способ по любому из пп. 1-3, отличающийся тем, что для выработки сигнала ошибки согласно функции разности между каждой теоретической величиной и сигналами измерения используют функцию передачи второго порядка.
9. Устройство пилотирования воздушного судна, содержащее:
по меньшей мере один орган (20, 30) пилотирования,
по меньшей мере одну информационную систему (40, 41) электронного управления полетом, предназначенную для генерирования, согласно функции предварительно заданной закономерности управления, сигналов управления приводами органов управления полетом воздушного судна согласно функции, по меньшей мере, сигналов, называемых первичными сигналами, поставляемых датчиками, связанными с каждым органом пилотирования,
по меньшей мере один модуль (53, 54) мониторинга функционирования устройства пилотирования, предназначенный для выявления аномалий функционирования внутри устройства пилотирования и генерирования соответствующих сигналов мониторинга и выполненный с возможностью:
на основе сигналов, поставляемых датчиками, связанными с каждым органом пилотирования и в соответствии по меньшей мере с одной предварительно заданной закономерностью вычисления вычислять по меньшей мере одну теоретическую величину по меньшей мере одного параметра функционирования,
называемого отслеживаемым параметром по меньшей мере одного органа пилотирования,
для каждого отслеживаемого параметра сравнивать каждую теоретическую величину с сигналами измерения, поставляемыми датчиками, связанными по меньшей мере с одним органом пилотирования,
выбирать действие мониторинга согласно функции разности между каждой теоретической величиной и сигналами измерения,
отличающееся тем, что указанный, по меньшей мере, один модуль (53, 54) мониторинга интегрирован в информационной системе (40, 41) электронного управления полетом, причем этот, по меньшей мере, один модуль (53, 54) мониторинга выполнен с возможностью вычисления, по меньшей мере, одной теоретической величины на основе первичных сигналов.
10. Устройство по п. 9, отличающееся тем, что по меньшей мере один модуль (53, 54) мониторинга выполнен с возможностью использования в качестве отслеживаемого параметра по меньшей мере одного из следующего: положения органа пилотирования или сил, приложенных к органу пилотирования.
11. Устройство по п. 9 или 10, отличающееся тем, что содержит по меньшей мере один мотор (23, 33) привода в действие по меньшей мере одного органа пилотирования и по меньшей мере один блок (60) управления обратной связи, выполненный с возможностью выработки сигналов, называемых сигналами силовой обратной связи, для управления каждым мотором привода в действие таким образом, чтобы генерировать восприятие моделированной силовой обратной связи на органе пилотирования, причем по меньшей мере один указанный модуль мониторинга выполнен в виде по меньшей мере одного центрального информационного блока информационной системы электронного управления полетом, отдельного от по меньшей мере одного блока управления силовой обратной связи.
12. Устройство по п. 11, отличающееся тем, что содержит по меньшей мере два подвижных органа (20, 30) пилотирования с одинаковыми степенями свободы, связанных посредством по меньшей мере одной информационной системы (40, 41) электронного управления полетом, с одними и теми же органами управления полетом воздушного судна и соединенных друг с другом посредством блока (60) управления силовой обратной связи.
13. Устройство по п. 11, отличающееся тем, что по меньшей мере один модуль (53, 54) мониторинга выполнен с возможностью замедлять по меньшей мере один мотор привода в действие силовой обратной связи, когда разность между каждой теоретической величиной и сигналами измерения превышает абсолютную величину предварительно определенной пороговой величины, соответствующей аномалии функционирования.
14. Воздушное судно, содержащее устройство пилотирования по любому из пп. 9-13.
| EP 0759585 A1, 26.02.1997 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

