Область техники
Настоящее изобретение относится к способу и устройству для взаимосвязи между первым и вторым органами пилотирования, причем каждый орган пилотирования содержит ручку управления, подвижную относительно рамы, и по меньшей мере один силовой привод, способный оказывать усилие, называемое усилием обратной связи, на ручку управления органа пилотирования. Изобретение относится также к устройству пилотирования, содержащему устройство взаимосвязи и осуществляющему способ взаимосвязи. Изобретение относится также к воздушному судну, оснащенному по меньшей мере одним таким устройством пилотирования.
В данном описании термин «пилотирование» и его производные подразумевают, если не указано иное, управление воздушным судном по меньшей мере одним человеком-пилотом, управляющим по меньшей мере одним органом пилотирования, таким как рукоятка, рычаг, педаль руля, педаль и т.п., связанным по меньшей мере с одним органом управления, таким как рулевая поверхность или управление газом воздушного судна. Кроме того, термин «усилие» используется для обозначения как крутящего момента, так и силы, в соответствии с тем, куда приложено это усилие (крутящего момента, если речь идет о вращении, или силы, если это касается поступательного перемещения). Термин «орган управления» обозначает любой орган, положение или состояние которого оказывает влияние на полет воздушного судна: в частности, он может воздействовать на рулевые поверхности, моторы, лопасти ротора. Термин «управление» и его производные традиционным в аэронавтике образом обозначают подачу на устройство сигналов, вызывающих заданное действие этого устройства. Выражение «по меньшей мере по существу» обычным образом указывает, что конструктивная характеристика, такая как величина, или функциональная характеристика не должна восприниматься как дискретная характеристика, не имеющая физического развития; эта характеристика охватывает не только указанную конструкцию или функцию, но также их небольшие вариации, которые в данном техническом контексте вызывают эффект того же рода или той же степени.
Уровень техники
В частном случае мини-рукоятки пилотирования воздушного судна орган пилотирования установлен и направляется при повороте с помощью шарового шарнира или двух шарнирных связей с осями, которые по существу перпендикулярны друг другу и пересекаются (образуя при этом поворотную связь с центральной точкой), что позволяет обеспечивать движения тангажа и бортового крена.
Традиционным образом устройство пилотирования воздушного судна содержит по меньшей мере один орган пилотирования, связанный по меньшей мере одной кинематической цепью по меньшей мере с одним органом управления, - в частности, с рулевой поверхностью, мотором, другими органами, - воздушного судна, а также, при необходимости, по меньшей мере с одним приводным исполнительным органом, называемым силовым приводом, который представляет собой орган, связанный с кинематической цепью таким образом, что обеспечивает возможность автоматического пилотирования и/или моделирования специфического динамического поведения органа пилотирования для его возврата в нейтральное положение и создания соответствующих ощущений (в частности, ощущений мышечного усилия), допуская или облегчая пилотирование пилотом-человеком.
Традиционные устройства пилотирования, называемые устройствами механического управления, содержат кинематическую цепь, которая механически соединяет органы пилотирования с органами управления. Для пилотирования некоторых воздушных судов были разработаны устройства пилотирования, называемые устройствами электрического управления полетом, в которых органы управления не полностью механически связаны кинематической цепью с органами пилотирования. Эти устройства пилотирования с электрическим управлением полетом имеют частичную кинематическую цепь, содержащую по меньшей мере один механизм установки и направления каждого органа пилотирования, который установлен и направляется относительно жесткой рамы воздушного судна, а также оснащены системой датчиков положения и/или усилия, связанных с вычислительными устройствами управления полетом (обычно они обозначаются как система управления полетом по приборам, от англ. "fly-by-wire flight control system" или FCS), которые генерируют сигналы управления на входе по меньшей мере частично электрических сервоустройств, приводящих в действие один или несколько органов управления.
Когда воздушное судно должно управляться одновременно пилотом и вторым пилотом, известно соединение между собой органов пилотирования или рукояток каждого пилота, так что каждая рукоятка синхронно перемещается под действием другой рукоятки, и каждый пилот может ощущать на своей рукоятке усилие, прилагаемое другим пилотом к своей рукоятке. Традиционно эта взаимосвязь усилий между органами пилотирования осуществляется с помощью системы тяг или тросов, механически соединяющих два органа пилотирования.
Такая взаимосвязь органов пилотирования известна также для устройств пилотирования с электрическим управлением (см., в частности, патентные документы US 3748749, US 5291113, US 2005/0080945).
В частности, в патентном документе US 5291113 описано устройство пилотирования, содержащее устройство взаимосвязи, которое осуществляет взаимосвязь перемещений и сил, прикладываемых к рукояткам пилота и второго пилота. Это устройство пилотирования содержит для каждого органа пилотирования ручку управления, связанную с датчиком усилия (в виде датчика крутящего момента) и с датчиком положения. Каждый датчик крутящего момента подает сигнал, представляющий крутящий момент, оказываемый/воспринимаемый пилотом (или соответственно вторым пилотом) на ручке управления. Из сигнала положения, подаваемого датчиком положения, и величины усилия обратной связи, образуемой суммой сигналов крутящего момента, компаратор генерирует погрешность крутящего момента, передаваемую затем на электронный регулятор, который подает соответствующий электрический ток управления на электромотор для исправления этой погрешности крутящего момента и модификации крутящего момента, ощущаемого пилотом (соответственно, вторым пилотом). Такое устройство взаимосвязи усилий имеет тот недостаток, что оно имитирует связь, сравнимую с жесткой тягой между органами пилотирования пилота и второго пилота. Однако в механических системах такая тяга обычно дополнена устройством, разъединяющим рукоятки пилотов, когда усилие, передаваемое одной рукояткой на другую, превышает предварительно определенный предел.
В патентном документе US 2005/0080945 также описано устройство пилотирования, содержащее взаимосвязь органов пилотирования и содержащее устройство оценки противодействующих сил, позволяющее разъединять органы пилотирования, когда разность усилий превышает определенную величину. Для выполнения этого разъединения требуется, в частности, множественное детектирование знаков прилагаемых усилий и их разности, а следовательно, множество детекторов и компонентов, сложных, дорогостоящих, громоздких и тяжелых, а также снижающих надежность.
В патентном документе WO 02014009639 описано устройство взаимосвязи с устройством коррекции, содержащим контур коррекции для ограничения величины усилия обратной связи в функции по меньшей мере одного параметра, который выбирается из абсолютной величины усилия пилотирования органа пилотирования и разности между величинами усилий пилотирования на каждом органе пилотирования. Электрический ток управления каждого привода ограничивается сатуратором до заданной величины тока насыщения для защиты привода. В типовом случае величина тока насыщения, обеспечиваемая сатуратором, соответствует максимальным крутящим моментам, которые дает привод, то есть величине усилия обратной связи на уровне ручки управления, которая обычно превышает 50 даН. Здесь также это устройство коррекции, хотя и работает, является дорогостоящим, громоздким и тяжелым. Кроме того, оно может осуществлять управление по импедансу (измерение положения органа пилотирования и обеспечение взаимосвязи усилий), но неприменимо для управления по проводимости (измерение усилия на органе пилотирования и обеспечение обратной связи его положения, как это описано, например, в патентном документе FR 2708112).
Раскрытие изобретения
Задачей настоящего изобретения является устранение указанных недостатков и создание более простых и менее дорогостоящих способа и устройства для взаимосвязи между органами пилотирования, требующих меньшего числа компонентов, менее громоздких и более легких. Задачей изобретения является также создание способа и устройства для взаимосвязи между органами пилотирования, совместимых с управлением как по проводимости, так и по импедансу.
В соответствии с изобретением способ взаимосвязи органов пилотирования, причем каждый орган пилотирования содержит:
- ручку управления, подвижную относительно рамы и имеющую центр приложения усилий,
- по меньшей мере один силовой привод, способный оказывать усилие, называемое усилием обратной связи, на ручку управления органа пилотирования,
при этом в способе:
- устройство обратной связи подает сигнал управления, питающий каждый силовой привод каждого органа пилотирования, при этом усилие обратной связи воздействует на каждую ручку управления с величиной усилия обратной связи, определяемой сигналом управления, питающим каждый силовой привод органа пилотирования, при этом величина сигнала управления определяется устройством обратной связи для обеспечения взаимосвязи между органами пилотирования,
- указанная величина сигнала управления ограничивается по меньшей мере одним сатуратором усилия устройства обратной связи таким образом, что она лежит в диапазоне величин [SCpsat-, SCpsat+], [SCcopsat-, SCcopsat+], ограниченном величинами тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+),
- указанное устройство обратной связи выполнено с возможностью выполнять функцию разъединения органов пилотирования при удовлетворении условий разъединения,
и отличается тем, что величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) адаптируют таким образом, что усилие обратной связи воздействует для каждой из величин тока насыщения с величиной усилия обратной связи в центре приложения усилий к ручке управления, составляющей от 4 до 40 даН, так что функцию разъединения по меньшей мере частично выполняют посредством указанного по меньшей мере одного сатуратора усилия устройства обратной связи.
Изобретение предусматривает также создание устройства для осуществления способа взаимосвязи по изобретению.
В соответствии с изобретением устройство взаимосвязи между органами пилотирования содержит:
- ручку управления, подвижную относительно рамы и имеющую центр приложения усилий,
- по меньшей мере один силовой привод, способный оказывать усилие, называемое усилием обратной связи, на ручку управления органа пилотирования,
при этом устройство взаимосвязи содержит устройство обратной связи, выполненное с возможностью подачи сигнала управления, питающего каждый силовой привод каждого органа пилотирования, при этом есть возможность воздействия усилия обратной связи на каждую ручку управления с величиной усилия обратной связи, определяемой сигналом управления, питающим каждый силовой привод органа пилотирования, при этом величина сигнала управления определена устройством обратной связи для обеспечения взаимосвязи между органами пилотирования,
при этом устройство обратной связи содержит по меньшей мере один сатуратор усилия, выполненный с возможностью ограничения указанной величины сигнала управления каждого органа пилотирования таким образом, что она лежит в диапазоне величин [SCpsat-, SCpsat+], [SCcopsat-, SCcopsat+], ограниченном величинами тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+),
и в котором устройство обратной связи выполнено с возможностью выполнять функцию разъединения органов пилотирования при удовлетворении условий разъединения,
и отличается тем, что устройство обратной связи выполнено таким образом, что величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) таковы, что усилие обратной связи, оказываемое для каждой из указанных величин тока насыщения, имеет величину в центре приложения усилий к ручке управления, составляющую от 4 до 40 даН, так что функцию разъединения по меньшей мере частично выполняют посредством указанного по меньшей мере одного сатуратора усилия устройства обратной связи.
Изобретение распространяется на способ взаимосвязи органов пилотирования, осуществляемый в устройстве по изобретению.
Таким образом, в способе и устройстве взаимосвязи в соответствии с изобретением функция разъединения органов пилотирования, состоящая в прекращении взаимосвязи между органами пилотирования, является по меньшей мере частично результатом конкретного выбора величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ ниже величин тока насыщения в устройствах уровня техники (от 50 до 100 даН), в которых, когда предусмотрен сатуратор для управления силовым приводом, эти обеспечиваемые сатуратором величины тока насыщения предназначены исключительно для защиты силового привода от слишком высокого тока управления. В отличие от этого в способе и устройстве взаимосвязи по изобретению величины тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ сатураторов усилия выбраны для соответствующего усилия обратной связи для того, чтобы эти величины тока насыщения вызывали разъединение органов пилотирования, когда величины обратной связи в центре приложения усилий к ручке управления соответствуют заданным условиям.
В способе и устройстве взаимосвязи по изобретению уже нет необходимости в контуре коррекции. При этом в некоторых примерах осуществления функция разъединения органов пилотирования реализуется исключительно посредством по меньшей мере одного сатуратора усилия. В устройстве по изобретению устройство обратной связи выполнено с возможностью того, чтобы функция разъединения реализовалась исключительно по меньшей мере одним сатуратором усилия; кроме этого по меньшей мере одного сатуратора усилия устройство взаимосвязи по изобретению не имеет специальной цепи для того, чтобы огранивать величину усилия обратной связи, прилагаемого к каждому органу пилотирования, и выполнять указанную функцию разъединения.
При этом ничто не препятствует тому, чтобы в варианте осуществления эта функция разъединения выполнялась также по меньшей мере частично посредством других компонентов устройства взаимосвязи помимо этого по меньшей мере одного сатуратора усилия, - например, для определенных степеней свободы ручки управления и/или для определенных направлений перемещения ручки управления и/или усилия на ней.
Далее, способ взаимосвязи по изобретению предпочтительно характеризуется всеми или частью следующих признаков в различных вариантах или в комбинации:
- по меньшей мере одна, - в частности, каждая, - из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ является постоянной заданной величиной,
- по меньшей мере одна, - в частности, каждая, - из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ является переменной величиной, подаваемой на указанный по меньшей мере один сатуратор усилия посредством цепи динамического управления указанного по меньшей мере одного сатуратора усилия,
- по меньшей мере одну из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ определяют посредством динамического управления в функции разности между измеренным усилием, воздействующим на ручку управления, и опорной величиной,
- по меньшей мере одна опорная величина для по меньшей мере одной величины тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ является постоянной заданной величиной,
- по меньшей мере одна опорная величина для по меньшей мере одной величины тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ является переменной величиной, зависящей от размера по меньшей мере одного параметра динамического состояния ручки управления, выбранного среди положения, скорости и ускорения,
- по меньшей мере одну из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ регистрируют в памяти по меньшей мере одного сатуратора усилия,
- величины тока насыщения SCpsat- и SCcopsat-, соответственно SCpsat+ и SCcopsat+ органов пилотирования в одном и том же направлении перемещения ручек управления равны (постоянны или динамически переменны),
- все величины тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ равны (постоянны или динамически переменны),
- органы пилотирования образованы первым органом пилотирования и вторым органом пилотирования,
- устройство обратной связи выполнено с возможностью реализации управления по проводимости каждого силового привода каждого органа пилотирования (измерение усилия, воздействующего на ручку управления органа пилотирования, и обеспечения обратной связи ее положения),
- устройство обратной связи выполнено с возможностью реализации управления по импедансу каждого силового привода каждого органа пилотирования (измерение положения ручки управления органа пилотирования и обеспечение обратной связи по усилию, оказываемому силовым приводом).
Таким же образом устройство взаимосвязи по изобретению характеризуется всеми или частью следующих признаков в различных вариантах или в комбинации:
- по меньшей мере один сатуратор усилия выполнен таким образом, что по меньшей мере одна, - в частности, каждая, - из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ является постоянной заданной величиной,
- по меньшей мере один сатуратор усилия содержит память, в которой зарегистрирована по меньшей мере одна, - в частности, каждая, - из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+,
- устройство содержит цепь динамического управления указанного по меньшей мере одного сатуратора усилия, выполненную с возможностью подачи на указанный по меньшей мере один сатуратор усилия по меньшей мере одной переменной величины из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+; в частности, цепь динамического управления указанного по меньшей мере одного сатуратора усилия выполнена с возможностью подачи на указанный по меньшей мере один сатуратор усилия каждой из также переменных величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+,
- цепь динамического управления содержит контур регулирования по меньшей мере одной, - в частности, каждой, - из величин тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ в функции разности между измеренной величины усилия, прикладываемого к ручке управления, подаваемой по меньшей мере одним датчиком измерения усилия, и опорной величиной,
- цепь динамического управления выполнена с возможностью предоставлять постоянную заданную опорную величину для по меньшей мере одной, - в частности, для каждой, - величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+),
- цепь динамического управления содержит для по меньшей мере одной из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) по меньшей мере один датчик измерения по меньшей мере одного параметра динамического состояния ручки управления, выбранного среди положения, скорости и ускорения, и выполнена с возможностью принятия в качестве опорной величины переменной величины, зависящей по меньшей мере от одной измеренной величины, которая предоставляется указанным по меньшей мере одним датчиком измерения по меньшей мере одного параметра динамического состояния ручки управления, выбранного среди положения, скорости и ускорения,
- устройство обратной связи выполнено таким образом, что величины тока насыщения SCpsat- и SCcopsat-, соответственно SCpsat+ и SCcopsat+ органов пилотирования в одном и том же направлении перемещения ручек управления равны (постоянны или динамически переменны),
- устройство обратной связи выполнено таким образом, что все величины тока насыщения SCpsat-, SCpsat+, SCcopsat-, SCcopsat+ равны (постоянны или динамически переменны),
- органы пилотирования образованы первым органом пилотирования и вторым органом пилотирования,
- устройство обратной связи выполнено с возможностью реализации управления по проводимости каждого силового привода каждого органа пилотирования (измерение усилия, воздействующего на ручку управления органа пилотирования, и обеспечения обратной связи ее положения),
- устройство обратной связи выполнено с возможностью реализации управления по импедансу каждого силового привода каждого органа пилотирования (измерение положения ручки управления органа пилотирования и обеспечение обратной связи по усилию, оказываемому силовым приводом),
- каждый орган пилотирования содержит собственный сатуратор усилия.
Изобретение распространяется на устройство пилотирования, содержащее по меньшей мере два органа пилотирования, - в частности, два органа пилотирования, - и устройство взаимосвязи органов пилотирования в соответствии с изобретением. Оно распространяется также на устройство пилотирования, содержащее по меньшей мере два органа пилотирования, - в частности, именно два органа пилотирования, - и выполненное с возможностью осуществлять способ взаимосвязи органов пилотирования в соответствии с изобретением.
Изобретение распространяется также на воздушное судно, содержащее устройство пилотирования в соответствии с изобретением.
Изобретение относится равным образом к способу взаимосвязи органов пилотирования, к устройству взаимосвязи органов пилотирования, к устройству пилотирования, - в частности, к устройству пилотирования воздушного судна, - и к воздушному судну, которые характеризуются в комбинации всеми или частью отличительных признаков, указанных выше или в последующем описании.
Краткий перечень чертежей
Другие цели, отличительные признаки и преимущества изобретения будут ясны из последующего описания со ссылками на прилагаемые чертежи. На чертежах:
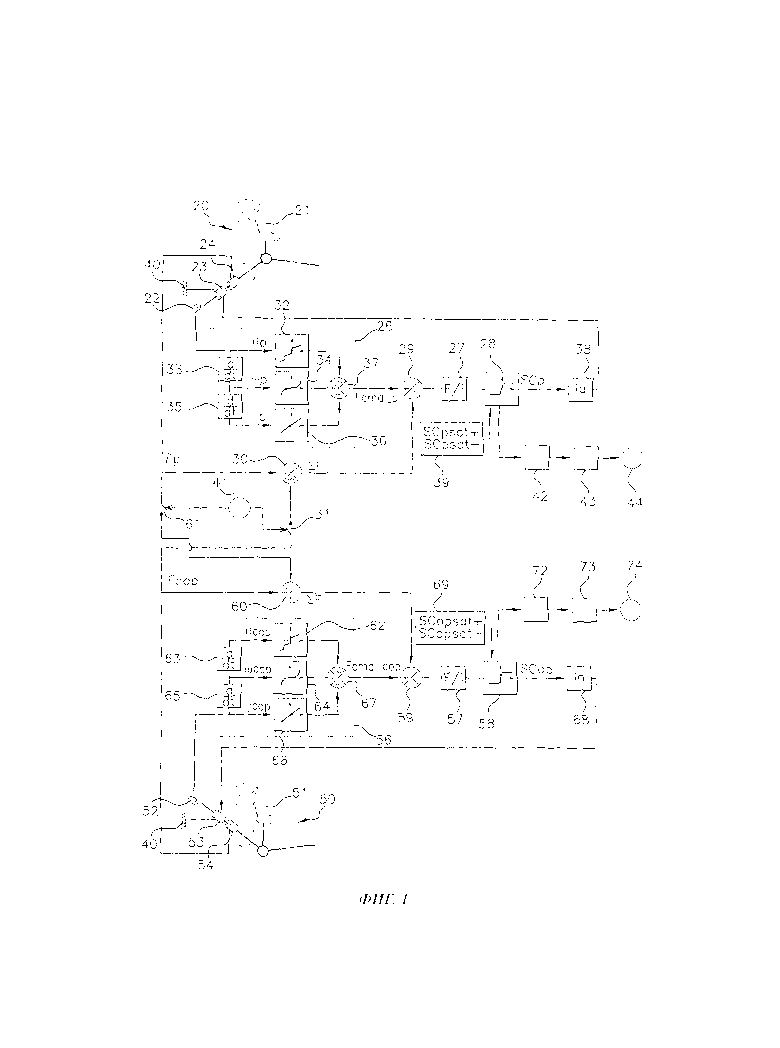
фиг. 1 изображает блок-схему устройства взаимосвязи усилий с управлением по импедансу и постоянными заданными величинами тока насыщения в соответствии с первым примером осуществления изобретения;
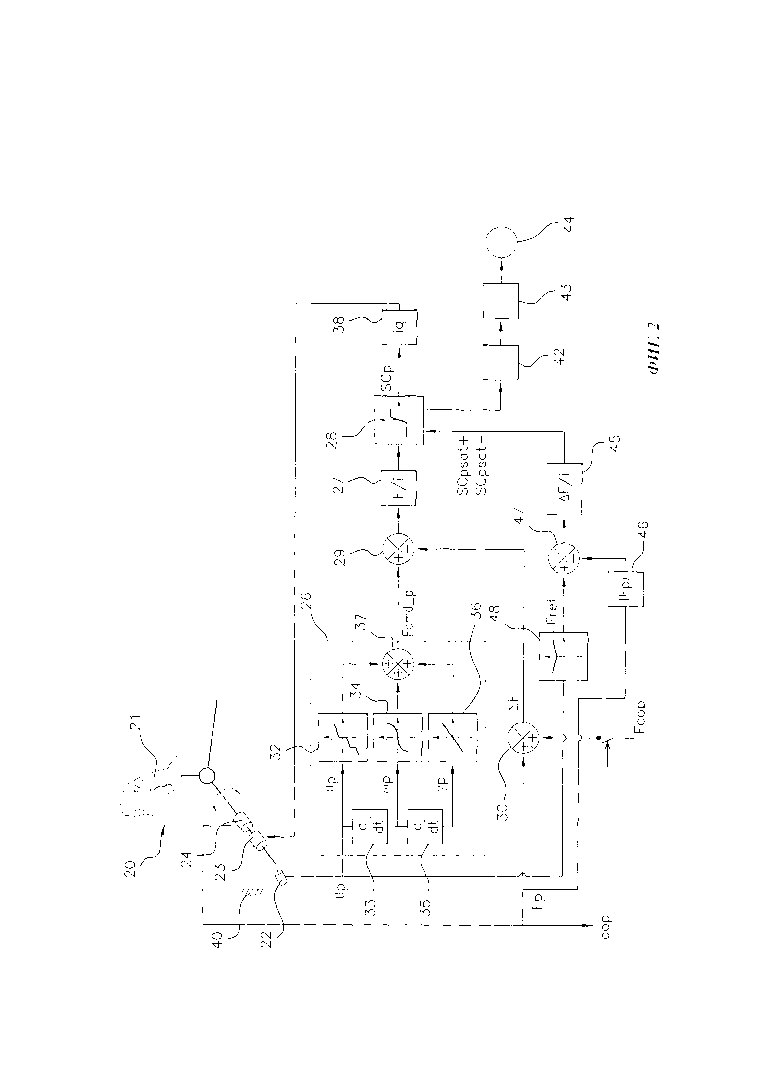
фиг. 2 изображает часть блок-схемы устройства взаимосвязи усилий во втором примере осуществления изобретения, представляющую устройство обратной связи с органом пилотирования с управлением по импедансу и переменными, динамически управляемыми величинами тока насыщения;
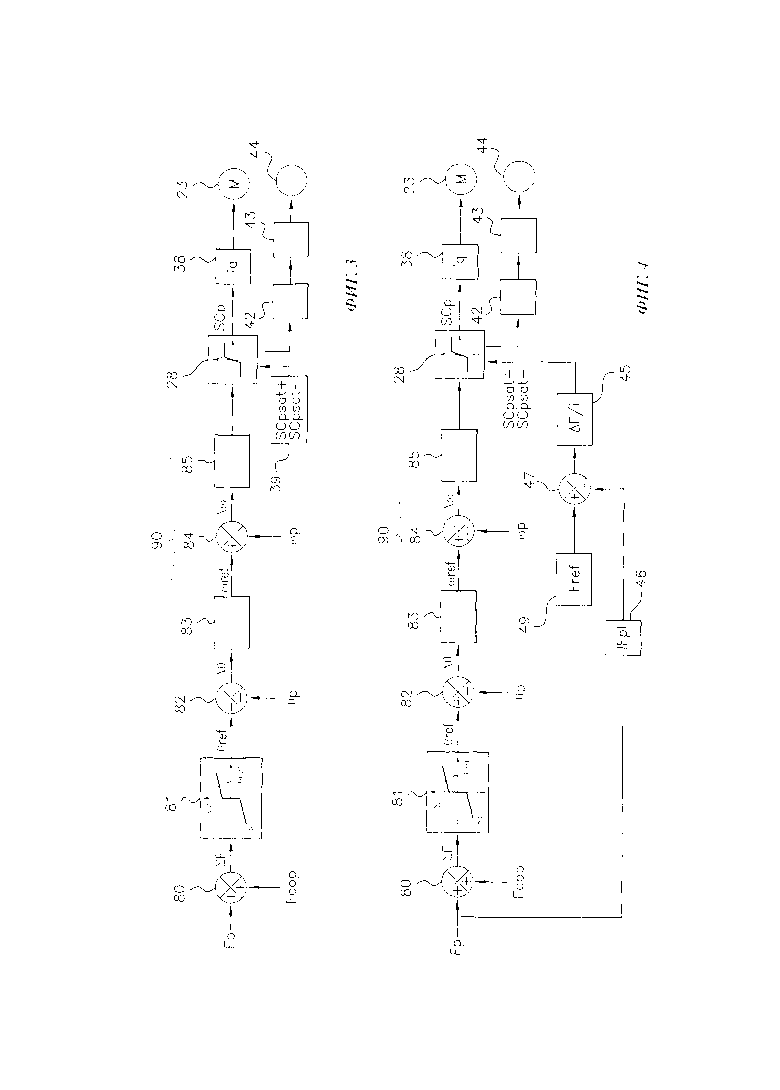
фиг. 3 изображает часть блок-схемы устройства взаимосвязи усилий в третьем примере осуществления изобретения, представляющую устройство обратной связи с органом пилотирования с управлением по проходимости и постоянными заданными величинами тока насыщения;
фиг. 4 изображает блок-схему, подобную блок-схеме по фиг. 3, во втором примере осуществления, представляющую устройство обратной связи с органом пилотирования с управлением по проходимости и переменными, динамически управляемыми величинами тока насыщения.
Осуществление изобретения
На фиг. 1 показаны два органа пилотирования, в данном случае две мини-рукоятки 20 и 50 пилотирования воздушного судна. Эти мини-рукоятки содержат ручку 21 (и, соответственно, 51) управления, каждая из которых предназначена для выполнения манипулирования пилотом (и, соответственно, вторым пилотом). В показанном примере выполнения эти ручки управления могут поворачиваться вокруг двух по меньшей мере по существу взаимно перпендикулярных осей. Однако изобретение относится также к другим вариантам выполнения, в которых ручки управления могут поворачиваться вокруг шарового шарнира или совершать линейные перемещения. В показанном примере выполнения полностью представлена только одна из двух осей каждого органа пилотирования, например, ось тангажа, а другую, аналогичную ось, например, ось бортового крена, можно установить по аналогии. В данном примере оказываемые усилия являются усилиями, относящимися к повороту, так что здесь для его обозначения будет использоваться термин «крутящий момент», который не следует интерпретировать как ограничение, например, в том случае, когда ручки являются ручками линейного перемещения, а оказываемое усилие является силой в направлении поступательного перемещения ручки.
Мини-рукоятка 20, например, предназначенная для пилота (командира борта), содержит последовательно вдоль оси тангажа по меньшей мере один датчик 24 крутящего момента, выполненный с возможностью подачи сигнала, представляющего величину усилия при приложении пилотом крутящего момента Fp к ручке 21 управления. Датчик 24 крутящего момента соединен с одной стороны с ручкой 21 управления и с другой стороны с электромотором 23, выполненным с возможностью приложения крутящего момента ΔF к оси ручки управления. Ротор электромотора 23 может быть, например, интегрирован с осью тангажа, тогда как его статор соединен с рамой 40 органа пилотирования. Датчик 22 положения также установлен последовательно на оси тангажа и позволяет подавать сигнал θр положения, здесь сигнал углового положения ручки 21 управления. Само собой разумеется, что ось мини-рукоятки может также содержать «пассивные» элементы, такие как пружины или демпферы, соединенные с рамой 40.
Симметричным образом предназначенная для второго пилота мини-рукоятка 50 содержит ручку 51 управления, датчик 54 крутящего момента, подающий сигнал, представляющий величину крутящего момента Fcop, оказываемого вторым пилотом на ручку управления, электромотор 53 и датчик 52 положения, подающий сигнал θсор углового положения ручки 51 управления второго пилота.
В дальнейшем тексте, когда параметры относятся к органу пилотирования пилота, им присваивается индекс «p». Когда те же параметры относятся к органу пилотирования второго пилота, им присваивается индекс «сор».
Мини-рукоятка 20 пилота содержит вычислительное устройство, включающее в себя блок 26 управления по импедансу, предназначенный для приема сигнала θp положения, подаваемого датчиком 22 положения, и выдачи теоретического усилия Fcmd_p управления, которое должно быть оказано пилотом на ручку 21 управления.
Поступающий от датчика 22 сигнал θp положения передается непосредственно на справочную таблицу 32, предназначенную для предоставления первой величины усилия управления в функции положения θp.
Сигнал θp положения также дифференцируется по времени в первом дифференциаторе 33 для предоставления сигнала ωp, соответствующего скорости перемещения ручки 21 управления. Этот сигнал ωp передается на вторую справочную таблицу 34, предназначенную для предоставления величины усилия, соответствующего усилию демпфирования в функции перемещения ручки 21 управления.
Таким же образом сигнал ωp передается на второй дифференциатор 35 по времени для предоставления сигнала γp, представляющего ускорение ручки 21 управления. Этот сигнал γp передается на вход третьей справочной таблицы 36 для получения величины усилия управления, соответствующей инерции ручки 21 управления.
Следует отметить, что величины ωp и γp могут быть непосредственно измерены датчиками скорости и ускорения вместо их вычисления из сигнала θp положения.
Далее три величины усилия управления складываются в сумматоре 37 для получения величины Fcmd_p, представляющей теоретическую результирующую величину усилия управления.
Это теоретическое усилие Fcmd_p управления передается на компаратор 29, в котором оно сравнивается с величиной ΣF суммы усилий Fp и Fcop, измеренных датчиками крутящего момента (24 и, соответственно, 54).
Величина ΣF предоставляется сумматором 30, который получает, с одной стороны, величину крутящего момента Fp, оказываемого пилотом на ручку управления, от датчика 24 крутящего момента, и, с другой стороны, величину крутящего момента Fcop, оказываемого вторым пилотом на ручку управления, от датчика 54 крутящего момента через коммутатор 31 сопряжения, управляемый сигналом сопряжения от регулятора 41 сопряжения. Когда коммутатор 31 сопряжения разомкнут, два органа 21, 51 пилотирования не взаимосвязаны, и только величина крутящего момента Fp, оказываемого пилотом на ручку управления, принимается во внимание компаратором 29. И наоборот, когда коммутатор 31 сопряжения замкнут, два органа 21, 51 пилотирования взаимосвязаны, и компаратором 29 принимается во внимание сумма ΣF измеренных усилий Fp и Fcop.
Компаратор 29 подает сигнал, соответствующий погрешности крутящего момента, на регулятор 27, в котором эта погрешность крутящего момента преобразуется в сигнал электрического тока, предназначенный для электромотора 23.
Выход регулятора 27 передается на сатуратор 28, называемый сатуратором 28 усилия, в котором подаваемый регулятором 27 сигнал тока ограничивается до предварительно определенных величин тока насыщения SCpsat+ в первом направлении усилия, оказываемого на ручку 21 управления и SCpsat- в другом направлении усилия, оказываемого на ручку 21 управления. Выход сатуратора 28 усилия подает сигнал SCp управления электромотором 23, представляющий изменение крутящего момента, которое должно быть оказано на вал оси тангажа ручки 21 управления.
В этом первом примере осуществления изобретения величины тока насыщения SCpsat+, SCpsat-, используемые сатуратором 28 усилия, являются постоянными заданными величинами, записанными в памяти 39. Предпочтительно эти величины являются регулируемыми, а запись в памяти 39 доступна для обеспечения возможности конфигурации устройства взаимосвязи в функции требуемых характеристик устройства пилотирования во время его изготовления и/или по запросу пользователя.
Ручка управления имеет зону захвата, предназначенную для ладони пилота, а центр приложения результирующей усилий, передаваемых между ручкой управления и рукой пилота, может определяться центральной частью этой зоны захвата, на уровне центра ладони пилота, независимо от направления и ощущения усилия, оказываемого или ощущаемого пилотом на ручке управления.
В соответствии с изобретением величины тока насыщения SCpsat+, SCpsat- выбраны и отрегулированы для реализации функции разъединения двух мини-рукояток 21, 51. Так, величины тока насыщения SCpsat+, SCpsat- выбирают такими, чтобы усилие обратной связи, прилагаемое к ручке 21 управления электромотором 23, когда сигнал SCp управления равен одной или другой величине тока насыщения SCpsat+, SCpsat-, вызывало усилие на ручке 21 управления, абсолютная величина которого, измеренная в центре приложения усилий ручки 21 управления, составляла от 4 до 40 даН. На самом деле определенному току соответствует определенное усилие для определенной кинематической цепи. На практике величины тока насыщения SCpsat+, SCpsat- могут быть определены экспериментально после выбора величины усилия обратной связи в центре приложения усилий ручки 21 управления от 4 до 40 даН путем размещения динамометра в этом центре приложения усилий и изменения различных величин сигнала SCp управления до получения выбранной величины. Следует отметить, что этот способ позволяет на практике учесть все усилия, передаточные отношения трансмиссии, трение и потери в кинематической цепи, соединяющей электромотор 23 с центром приложения усилий ручки 21 управления.
Следует также отметить, что, учитывая асимметрию усилий, прилагаемых пилотом к ручке управления, нет необходимости в том, чтобы принимать величину тока насыщения SCpsat+ в одном направлении усилия, оказываемого на ручку 21 управления, равной величине тока насыщения SCpsat- в другом направлении усилия, оказываемого на ручку 21 управления. Как бы то ни было, для получения функции разъединения мини-рукояток две величины тока насыщения SCpsat+, SCpsat- выбирают такими, чтобы развить усилие от 4 до 40 даН в центре приложения усилий ручки 21 управления.
Действительно, этот диапазон величин усилий в центре приложения усилий ручки 21 управления, лежащий намного ниже величин усилия, соответствующих пределам тока насыщения, которые дают сатураторы уровня техники (от 50 до 100 даН), позволяет вследствие этого простого обстоятельства обеспечивать функцию разъединения между двумя мини-рукоятками 21, 51. Действительно, при наличии противодействия усилиям, оказываемым пилотом и вторым пилотом, по управлению, по импедансу или по проводимости, ток управления мотором каждой ручки управления повышается для создания ощущения противодействия, и с момента, когда ток управления достигает величины тока насыщения сатуратора 28, этот ток управления больше не повышается, как это должно было бы быть, что вызывает относительное перемещение между ручкой управления пилота и ручкой управления второго пилота.
Предпочтительно сатуратор 28 может быть выполнен в виде программы, осуществляющей сравнения. В варианте осуществления он может быть выполнен в виде электронного устройства, то есть может содержать простые аналоговые компараторы.
Детектор 42 тока насыщения связан с сатуратором 28 усилия для определения того, что на выходе сатуратора 28 усилия имеется величина, равная одной или другой величине тока насыщения SCpsat+, SCpsat-. Подаваемый этим детектором 42 сигнал тока насыщения поступает через фильтр 43 в логическую схему 44, которая позволяет инициировать аварийные сигналы и/или действия для пилота и/или для второго пилота.
Сигнал SCp управления подается на вход силовой цепи 38 питания электромотора 23 электрическим током, соответствующим величине сигнала SCp управления. В частности, в случае трехфазного электромотора силовая цепь 38 может содержать контур регулирования с обратной связью величины электрического тока iq этого сигнала SCp управления со сдвигом по фазе на 90°, при этом величина прямого тока id поддерживается этим контуром равной нулю.
Мини-рукоятка 50 второго пилота подобна мини-рукоятке 20 пилота и содержит вычислительное устройство, включающее в себя блок 56 управления по импедансу, предназначенный для приема сигнала θсор положения, подаваемого датчиком 52 положения, и выдачи теоретического усилия Fcmd_cop управления, которое должно быть оказано вторым пилотом на ручку 51 управления.
Поступающий от датчика 52 сигнал θсор положения передается непосредственно на справочную таблицу 62, предназначенную для предоставления первой величины усилия управления в функции положения θсор.
Сигнал θсор также дифференцируется по времени в первом дифференциаторе 63 для предоставления сигнала ωсор, соответствующего скорости перемещения ручки 51 управления. Этот сигнал ωсор передается на вторую справочную таблицу 64, предназначенную для предоставления величины усилия, соответствующего усилию демпфирования в функции перемещения ручки 51 управления.
Таким же образом сигнал ωсор передается на второй дифференциатор 65 по времени для предоставления сигнала γсор, представляющего ускорение ручки 51 управления. Этот сигнал γсор передается на вход третьей справочной таблицы 66 для получения величины усилия управления, соответствующей инерции ручки 51 управления.
В варианте осуществления величины ωсор и γсор могут быть непосредственно измерены датчиками скорости и ускорения вместо их вычисления из сигнала θсор положения.
Далее три величины усилия управления складываются в сумматоре 67 для получения величины Fcmd_cop, представляющей теоретическую результирующую величину усилия управления.
Это теоретическое усилие Fcmd_cop управления передается на компаратор 59, в котором оно сравнивается с величиной суммы ΣF усилий Fp и Fcop, измеренных датчиками крутящего момента (24 и, соответственно, 54).
Величина ΣF предоставляется сумматором 60, который получает, с одной стороны, величину крутящего момента Fcop, оказываемого вторым пилотом на ручку управления, от датчика 54 крутящего момента, и, с другой стороны, величину крутящего момента Fp, оказываемого пилотом на ручку управления, от датчика 24 через коммутатор 61 сопряжения, управляемый сигналом сопряжения от регулятора 41 сопряжения. Когда коммутатор 61 сопряжения разомкнут, два органа 21, 51 пилотирования не взаимосвязаны, и только величина крутящего момента Fcop, оказываемого вторым пилотом на ручку управления, принимается во внимание компаратором 59. И наоборот, когда коммутатор 61 сопряжения замкнут, два органа 21, 51 пилотирования взаимосвязаны, и компаратором 59 принимается во внимание сумма ΣF измеренных усилий Fp и Fcop.
Компаратор 59 подает сигнал, соответствующий погрешности крутящего момента, на регулятор 57, в котором эта погрешность крутящего момента преобразуется в сигнал электрического тока, предназначенный для электромотора 53.
Выход регулятора 57 передается на сатуратор 58, называемый сатуратором 58 усилия, в котором подаваемый регулятором 57 сигнал тока ограничивается до предварительно определенных величин тока насыщения SCcopsat+ в первом направлении усилия, оказываемого на ручку 51 управления и SCcopsat- в другом направлении усилия, оказываемого на ручку 51 управления. Выход сатуратора 58 усилия подает сигнал SCcop управления электромотором 53, представляющий изменение крутящего момента, которое должно быть оказано на вал оси тангажа ручки 51 управления.
Таким же образом, как и для мини-рукоятки 20 пилота, величины тока насыщения SCcopsat+, SCcopsat-, используемые сатуратором 58 усилия для мини-рукоятки 50 второго пилота, в этом первом примере осуществления являются постоянными заданными величинами, записанными в памяти 69. Эти величины также являются регулируемыми, а запись в памяти 69 доступна для обеспечения возможности конфигурации устройства взаимосвязи в функции требуемых характеристик устройства пилотирования во время его изготовления и/или по запросу пользователя.
Величины тока насыщения SCcopsat+, SCcopsat- также выбраны и отрегулированы для реализации функции разъединения двух мини-рукояток 21, 51. Так, величины тока насыщения SCcopsat+, SCcopsat- выбирают такими, чтобы усилие обратной связи, прилагаемое к ручке 51 управления электромотором 53, когда сигнал SCp управления равен одной или другой величине тока насыщения SCcopsat+, SCcopsat-, вызывало усилие на ручке 51 управления, абсолютная величина которого, измеренная в центре приложения усилий ручки 21 управления, составляла от 4 до 40 даН. На практике величины тока насыщения SCcopsat+, SCcopsat- могут быть определены экспериментально после выбора величины усилия обратной связи в центре приложения усилий ручки 51 управления от 4 до 40 даН путем размещения динамометра в этом центре приложения усилий и изменения различных величин сигнала SCcop управления до получения выбранной величины.
Здесь также нет необходимости в том, чтобы принимать величину тока насыщения SCcopsat+ в одном направлении перемещения ручки 51 управления, равной величине тока насыщения SCpsat- в другом направлении перемещения ручки 51 управления. Как бы то ни было, для получения функции разъединения мини-рукояток две величины тока насыщения SCpsat+, SCpsat- выбирают такими, чтобы развивать усилие от 4 до 40 даН в центре приложения усилий ручки 51 управления.
Детектор 72 тока насыщения связан с сатуратором 58 усилия для определения того, что на выходе сатуратора 58 усилия имеется величина, равная одной или другой величине тока насыщения SCcopsat+, SCcopsat-. Подаваемый этим детектором 72 сигнал тока насыщения поступает через фильтр 73 в логическую схему 74, которая позволяет инициировать аварийные сигналы и/или действия для пилота и/или для второго пилота.
Величины тока насыщения SCpsat+, SCpsat-, используемые для мини-рукоятки 20 пилота могут быть равны или не равны величинам тока насыщения SCcopsat+, SCcopsat-, используемым для мини-рукоятки 50 второго пилота.
Сигнал SCcop управления подается на вход силовой цепи 68 питания электромотора 53 электрическим током, соответствующим величине сигнала SCcop управления. В частности, в случае трехфазного электромотора силовая цепь 68 может содержать контур (с обратной связью) регулирования величины электрического тока iq этого сигнала SCcop управления со сдвигом по фазе на 90°, при этом величина прямого тока id поддерживается этим контуром равной нулю.
На фиг. 2 показано только устройство обратной связи мини-рукоятки 20 пилота, при этом принимается, что устройство обратной связи мини-рукоятки 50 второго пилота может быть идентичным. Второй пример выполнения по фиг. 2 отличается от первого примера по фиг. 1 тем, что величины тока насыщения SCpsat+, SCpsat-, SCcopsat+, SCcopsat- не являются постоянными заданными величинами, а в отличие от этого представляют собой динамически переменные величины.
Для этого регулятор 45 динамически определяет величины тока насыщения SCpsat+, SCpsat- и передает их на сатуратор 28 усилий. Регулятор 45 может быть образован регулятором, например, выбранным между пропорционально-интегральным регулятором (ПИ-регулятором) и пропорционально-интегрально-дифференциальным регулятором (ПИД-регулятором), которые выполняют регулируют величины тока насыщения в функции разности усилий.
В показанном на фиг. 2 примере осуществления регулятор 45 определяет величины тока насыщения SCpsat+, SCpsat- в функции разности между абсолютной величиной крутящего момента |Fp|, оказываемого пилотом на ручку управления и подаваемой датчиком 24 крутящего момента, и опорной величиной Fref. Сама опорная величина Fref динамически определяется из сигнала θр положения от датчика 22 положения с помощью закономерности, определяющей опорную величину Fref в функции этого измеряемого положения. Для этого величина крутящего момента Fp, оказываемого пилотом на ручку управления и подаваемая датчиком 24 крутящего момента, подается на вход цепи 46, которая дает абсолютную величину |Fp|, на своем выходе, соединенном с отрицательным входом компаратора 47. При этом сигнал θp положения от датчика 22 положения передается на справочную таблицу 48, предназначенную для предоставления опорной величины Fref, передаваемой на положительный вход компаратора 47.
В варианте осуществления вполне может быть предусмотрено, что опорная величина Fref может быть постоянной заданной величиной, которая записана в памяти и может быть отрегулирована пользователем или, наоборот, она может определяться динамически по сигналу θp положения и/или по сигналу ωp скорости и/или по сигналу γp ускорения (справочная таблица 48 может быть заменена, например, блоком, подобным вышеупомянутому блоку 26). Ничто также не препятствует тому, чтобы в варианте осуществления или в комбинации определять опорную величину для мини-рукоятки 20 пилота на основе измеренного положения и/или на основе измеренной скорости и/или на основе измеренного ускорения и/или на основе измеренного усилия на другой мини-рукоятке 50 второго пилота.
На фиг. 3 показано только устройство обратной связи мини-рукоятки 20 пилота, при этом принимается, что устройство обратной связи мини-рукоятки 50 второго пилота может быть идентичным. Третий пример выполнения по фиг. 3 отличается от примера по фиг. 1 только тем, что устройство обратной связи электромотора 23 является устройством управления по проводимости, а не устройством управления по импедансу. Для этого сигнал, дающий измеренную величину крутящего момента Fp, оказываемого пилотом на ручку 21 управления и подаваемую датчиком 24 крутящего момента, а также сигнал, дающий измеренную величину крутящего момента Fcop, оказываемого пилотом на ручку 51 управления и подаваемую датчиком 54 крутящего момента, передаются на вход сумматора 80, выход которого дает сумму ΣF усилий Fp и Fcop. Эта сумма ΣF передается на вход справочной таблицы 81, предоставляющей сигнал θref опорного положения, который сравнивается компаратором 82 с сигналом θp положения от датчика 22 положения. Справочная таблица 81 является статической зависимостью, определяющей ощущение усилия обратной связи, прилагаемого электродвигателем 23 к ручке 21 управления. Компаратор 82 выдает на выходе сигнал погрешности положения, Δθ=θref-θp, подаваемый на вход регулятора 83 положения, который выдает на выходе опорный сигнал ωref скорости, сравниваемый компаратором 84 с величиной сигнала ωp скорости перемещения ручки 21 управления, причем сигнал ωp скорости может быть вычислен из сигнала θp положения или измерен непосредственно на валу ручки управления. Компаратор 84 выдает на выходе сигнал погрешности скорости, Δω=ωref-ωp, передаваемый на вход регулятора 85 скорости, выход которого выдает сигнал электрического тока, предназначенный для электромотора 23.
Регулятор 83 положения и регулятор 85 скорости образуют цепь 90, определяющую динамическую характеристику ощущения усилия обратной связи, прикладываемого мотором 23 к ручке 21 управления. Следует отметить, что в не показанном варианте осуществления эта цепь 90, определяющая динамическую характеристику ощущения усилия обратной связи, может быть упрощена путем того, что содержит только регулятор 83 положения (без регулятора 85 скорости), или модифицирована путем того, что регулятор 85 скорости заменен регулятором ускорения или цепь дополнительно содержит такой регулятор ускорения.
Выход последнего регулятора цепи 90, то есть регулятора 85 скорости в примере выполнения по фиг. 3, передается на сатуратор 28, который подает сигнал управления мотором 23, как в первом примере выполнения по фиг. 1.
Пример выполнения по фиг. 4 отличается от примера по фиг. 3 только тем, что величины тока насыщения SCpsat+, SCpsat- являются динамически переменными и предоставляются регулятором 45, как во втором примере выполнения по фиг. 2. В варианте по фиг. 4, при этом опорная величина Fref является постоянной заданной величиной, записанной в памяти 49, связанной с положительным входом компаратора 47.
Таким образом, по всех примерах осуществления изобретения сатураторы 28, 58 усилия ограничивают сигналы управления электромоторами 23, 53 до величин тока насыщения, для которых усилия обратной связи, прилагаемые к ручкам управления, удовлетворяют условиям разъединения взаимосвязи между мини-рукоятками.
При осуществлении изобретения возможно множество вариантов помимо представленных на чертежах и описанных выше. Так, например, для управления двумя мини-рукоятками может быть предусмотрено только одно устройство обратной связи (вместо двух устройств обратной связи, по одному для каждой из них); может быть предусмотрен только один общий сатуратор (при наличии резервной системы безопасности на борту воздушного судна) для подачи сигналов управления электромоторами двух мини-рукояток; может быть предусмотрена более сложная логическая цепь для определения величин тока насыщения SCpsat+, SCpsat-, SCcopsat+, SCcopsat-, позволяющая осуществлять разъединение; возможности регулирования этих величин тока насыщения с помощью динамометров, как это было указано выше, могут быть предусмотрены в ходе операций по техническому обслуживанию устройства пилотирования и даже в ходе эксплуатации, например, перед каждым использованием; разъединение при соответствующем выборе величин тока насыщения SCpsat+, SCpsat-, SCcopsat+, SCcopsat- в соответствии с изобретением может осуществляться применительно ко всем степенями свободы органов пилотирования или только к их части, вплоть до одного направления перемещения (и усилия) степени свободы органов пилотирования; различные сатураторы могут использоваться для реализации функции разъединения для различных степеней свободы органов пилотирования или, наоборот, один и тот же сатуратор может использоваться для реализации функции разъединения для различных степеней свободы органов пилотирования; специальные датчики положения и/или скорости и/или ускорения и/или усилий могут быть добавлены к кинематической цепи установки каждого органа пилотирования для реализации устройства и способа взаимосвязи в соответствии с изобретением или, наоборот, могут использоваться датчики, которые уже были первоначально предусмотрены для электрического управления полетом; изобретение может использоваться применительно к органам пилотирования, отличным от мини-рукояток, например, к педалям, рычагам управления газом и другим органам.
Группа изобретений относится к способу взаимосвязи органов пилотирования, устройству взаимосвязи между органами пилотирования, устройству пилотирования и воздушному судну, содержащему устройство пилотирования. Для взаимосвязи органов пилотирования устройство обратной связи подает сигнал управления на силовой привод каждого органа управления, определенный определенным образом, производят разъединение органов пилотирования при удовлетворении условий разъединения. Устройство взаимосвязи между органами пилотирования содержит ручки управления, подвижные относительно рамы и имеющие центр приложения усилий, силовой привод. Устройство взаимосвязи содержит устройство обратной связи, содержащее сатуратор усилия для ограничения сигнала управления до определенной величины и выполненное с возможностью разъединения органов пилотирования. Устройство пилотирования содержит не менее двух органов пилотирования и устройство взаимосвязи между ними. Обеспечивается упрощение взаимосвязи между органами пилотирования, совместимыми с управлением по проводимости и импедансу. 4 н. и 11 з.п. ф-лы, 4 ил.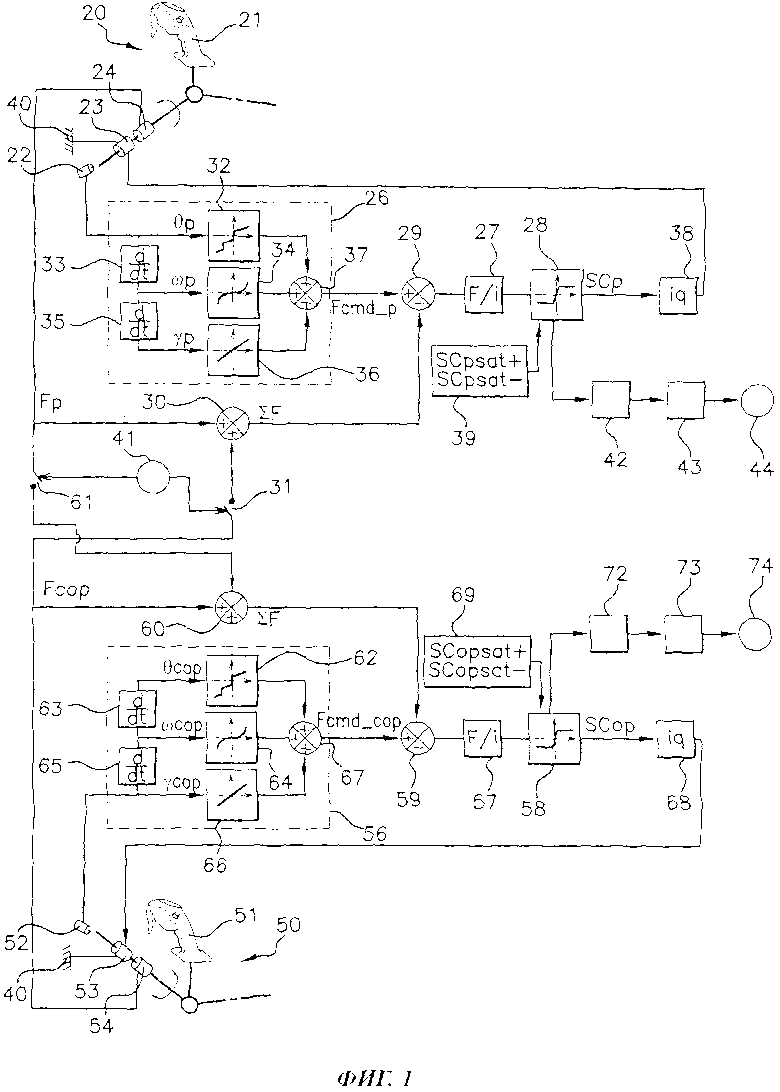
1. Способ взаимосвязи органов (20, 50) пилотирования, причем каждый орган пилотирования содержит:
- ручку (21, 31) управления, подвижную относительно рамы (40) и имеющую центр приложения усилий,
- по меньшей мере один силовой привод (23, 53), способный оказывать усилие, называемое усилием обратной связи, на ручку управления органа пилотирования,
при этом в способе:
- устройство обратной связи подает сигнал управления, питающий каждый силовой привод (23, 53) каждого органа пилотирования, при этом усилие обратной связи воздействует на каждую ручку управления с величиной усилия обратной связи, определяемой сигналом управления, питающим каждый силовой привод органа пилотирования, при этом величину (SCp, SCcop) сигнала управления определяет устройство обратной связи для обеспечения взаимосвязи между органами пилотирования,
- указанная величина (SCp, SCcop) сигнала управления ограничена по меньшей мере одним сатуратором (28, 58) усилия устройства обратной связи таким образом, что она лежит в диапазоне величин [SCpsat-, SCpsat+], [SCcopsat-, SCcopsat+], ограниченном величинами тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+),
- указанное устройство обратной связи выполнено с возможностью осуществлять функцию разъединения органов (20, 50) пилотирования при удовлетворении условий разъединения,
отличающийся тем, что величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) адаптируют таким образом, что усилие обратной связи воздействует для каждой из величин тока насыщения с величиной усилия обратной связи в центре приложения усилий к ручке (21, 51) управления, составляющей от 4 до 40 даН, так что функцию разъединения по меньшей мере частично выполняют посредством указанного по меньшей мере одного сатуратора (28, 58) усилия устройства обратной связи.
2. Способ по п. 1, отличающийся тем, что функцию разъединения реализуют исключительно посредством указанного по меньшей мере одного сатуратора (28, 58) усилия.
3. Способ по п. 1 или 2, отличающийся тем, что по меньшей мере одна из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) является переменной величиной, подаваемой на указанный по меньшей мере один сатуратор (28, 58) усилия посредством цепи (45) динамического управления указанного по меньшей мере одного сатуратора усилия.
4. Способ по п. 3, отличающийся тем, что по меньшей мере одну из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) определяют посредством указанной цепи (45) динамического управления в функции разности между измеренным усилием, воздействующим на ручку управления, и опорной величиной (Fref).
5. Способ по п. 4, отличающийся тем, что по меньшей мере одна опорная величина (Fref) для по меньшей мере одной величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) является постоянной заданной величиной.
6. Способ по п. 4 или 5, отличающийся тем, что по меньшей мере одна опорная величина (Fref) для по меньшей мере одной величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) является переменной величиной, зависящей от размера по меньшей мере одного параметра динамического состояния ручки (21, 51) управления, выбранного среди положения, скорости и ускорения.
7. Устройство взаимосвязи между органами (20, 50) пилотирования, содержащее:
- ручку (21, 51) управления, подвижную относительно рамы (40) и имеющую центр приложения усилий,
- по меньшей мере один силовой привод (23, 53), способный оказывать усилие, называемое усилием обратной связи, на ручку управления органа пилотирования,
при этом устройство взаимосвязи содержит устройство обратной связи, выполненное с возможностью подачи сигнала управления, питающего каждый силовой привод каждого органа пилотирования, при этом есть возможность воздействия усилия обратной связи на каждую ручку управления с величиной усилия обратной связи, определяемой сигналом управления, питающим каждый силовой привод органа пилотирования, при этом величина (SCp, SCcop) сигнала управления определена устройством обратной связи для обеспечения взаимосвязи между органами пилотирования,
при этом устройство обратной связи содержит по меньшей мере один сатуратор (28, 58) усилия, выполненный с возможностью ограничения указанной величины (SCp, SCcop) сигнала управления каждого органа пилотирования таким образом, что она лежит в диапазоне величин [SCpsat-, SCpsat+], [SCcopsat-, SCcopsat+], ограниченном величинами тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+),
и в котором устройство обратной связи выполнено с возможностью осуществлять функцию разъединения органов (20, 50) пилотирования при удовлетворении условий разъединения,
отличающееся тем, что устройство обратной связи выполнено таким образом, что величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) таковы, что усилие обратной связи, оказываемое для каждой из указанных величин тока насыщения, имеет величину в центре приложения усилий к ручке (21, 51) управления, составляющую от 4 до 40 даН, так что есть возможность по меньшей мере частичного выполнения функции разъединения посредством указанного по меньшей мере одного сатуратора (28, 58) усилия устройства обратной связи.
8. Устройство по п. 7, отличающееся тем, что устройство обратной связи выполнено с возможностью реализации функции разъединения исключительно посредством указанного по меньшей мере одного сатуратора (28, 58) усилия.
9. Устройство по п. 7 или 8, отличающееся тем, что указанный по меньшей мере один сатуратор (28, 58) усилия содержит память, в которой зарегистрирована по меньшей мере одна из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+).
10. Устройство по п. 7 или 8, отличающееся тем, что содержит цепь (45) динамического управления указанного по меньшей мере одного сатуратора (28, 58) усилия, выполненную с возможностью подачи на указанный по меньшей мере один сатуратор усилия по меньшей мере одной переменной величины из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+).
11. Устройство по п. 10, отличающееся тем, что цепь (45) динамического управления содержит контур регулирования по меньшей мере одной, в частности каждой, из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) в функции разности между измеренной величиной усилия, прикладываемого к ручке (21, 51) управления, подаваемой по меньшей мере одним датчиком измерения усилия, и опорной величиной (Fref).
12. Устройство по п. 11, отличающееся тем, что цепь (45) динамического управления выполнена с возможностью предоставлять постоянную заданную опорную величину (Fref) для по меньшей мере одной, в частности для каждой, величины тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+).
13. Устройство по п. 11 или 12, отличающееся тем, что цепь (45) динамического управления содержит для по меньшей мере одной из величин тока насыщения (SCpsat-, SCpsat+, SCcopsat-, SCcopsat+) по меньшей мере один датчик измерения по меньшей мере одного параметра динамического состояния ручки управления, выбранного среди положения, скорости и ускорения, и выполнена с возможностью принятия в качестве опорной величины (Fref) переменной величины, зависящей по меньшей мере от одной измеренной величины, предоставляемой указанным по меньшей мере одним датчиком измерения по меньшей мере одного параметра динамического состояния ручки управления, выбранного среди положения, скорости и ускорения.
14. Устройство пилотирования, содержащее по меньшей мере два органа (20, 50) пилотирования и устройство взаимосвязи органов пилотирования, выполненное по любому из пп. 7-13.
15. Воздушное судно, содержащее устройство пилотирования, выполненное по п. 14.
| Устройство для регулирования скорости клиноременного вариатора | 1955 |
|
SU114939A1 |
| RU 2011120142 A, 27.11.2012 | |||
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2004 |
|
RU2255879C1 |
| US 20020135327 A1, 26.09.2002 | |||
| US 20110112705 A1, 12.05.2011. | |||

