УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству содействия при вождении, которое обладает функцией привлечения внимания водителя транспортного средства или функцией автоматического торможения транспортного средства, когда имеется вероятность пересечения объектом пути, по которому, как ожидается, пройдет транспортное средство (далее в материалах настоящей заявки, просто указываемому ссылкой, как "ожидаемый путь").
2. Описание предшествующего уровня техники
[0002] В предшествующем уровне техники известно устройство содействия при вождении, которое установлено в транспортное средство и привлекает внимание водителя транспортного средства или автоматически тормозит транспортное средство, когда имеется вероятность пересечения объектом ожидаемого пути транспортного средства. Далее в материалах настоящей заявки, транспортное средство, в котором установлено устройство содействия при вождении, будет указано ссылкой, как "базовое транспортное средство".
[0003] Когда направление движения базового транспортного средства пересекается с направлением движения объекта на перекрестке, устройство, раскрытое, например, в нерассмотренной публикации заявки на выдачу патента Японии № 2013-156688 (JP 2013-156688 A) (далее в материалах настоящей заявки, указываемое ссылкой, как "устройство по предшествующему уровню техники") предсказывает первый период времени, в течение которого базовое транспортное средство достигнет перекрестка, и второй период времени, в течение которого объект достигнет перекрестка. А именно, устройство по предшествующему уровню техники предсказывает первый период времени на основании положения, направления движения и скорости базового транспортного средства в текущий момент времени, и предсказывает второй период времени на основании положения, направления движения и скорости объекта в текущий момент времени.
[0004] Устройство по предшествующему уровню техники содержит карту, которая устанавливается заранее. Карта содержит вертикальную ось, обозначающую первый период времени, и горизонтальную ось, обозначающую второй период времени. На карте, область, в которой абсолютное значение разницы во времени между первым периодом времени и вторым периодом времени меньше или равна предопределенному значению, установлена, как область, в которой имеется вероятность пересечения объектом ожидаемого пути базового транспортного средства (то есть, область, в которой привлекается внимание). Другая область карты установлена как область, в которой отсутствует вероятность пересечения объектом ожидаемого пути базового транспортного средства (то есть, область, в которой внимание не привлекается). Устройство по предшествующему уровню техники отображает координаты, имеющие компоненты предсказываемых первого периода времени и второго периода времени, на карте, определяет, имеется ли вероятность пересечения объектом ожидаемого пути базового транспортного средства, посредством определения области, в которой расположены координаты, и привлекает внимание, когда имеется вероятность пересечения объектом ожидаемого пути базового транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Конфигурация устройства по предшествующему уровню техники может привлекать внимание водителя к объекту, даже если фактически отсутствует вероятность или имеется очень низкая вероятность пересечения объектом ожидаемого пути базового транспортного средства. То есть, даже когда направление движения базового транспортного средства пересекается с направлением движения объекта на перекрестке, и когда определяется, что объект требует внимания, на основании предсказываемых первого периода времени и второго периода времени, фактически, объект может не пересекать ожидаемый путь базового транспортного средства из-за возникновения любой ситуации движения транспорта, которая, как ожидается, будет препятствовать движению объекта. Согласно наблюдениям изобретателей, такая ситуация движения транспорта является, например, ситуацией, в которой другое транспортное средство, которое движется в том же направлении, что и базовое транспортное средство, или в противоположном направлении относительно базового транспортного средства, присутствует перед базовым транспортным средством или за ним, или в которой сигнал регулирования движения в направлении движения транспортного средства, определенного, как требующее внимания (привлекающего внимание целевого транспортного средства), зажжен красным и побуждает привлекающее внимание целевое транспортное средство замедлиться или остановиться. Устройство по предшествующему уровню техники не рассматривает возникновение такой ситуации движения транспорта. Таким образом, устройство по предшествующему уровню техники привлекает внимание каждый раз, когда определяется, что необходимо привлечение внимания, на основании предсказываемых первого периода времени и второго периода времени. Следовательно, устройство по предшествующему уровню техники может привлекать внимание к объекту, которому не нужно внимание, и, таким образом, может вызывать у водителя ощущение неудобства.
[0006] Такая проблема не ограничена устройством содействия при вождении, которое привлекает внимание, когда определяется, что имеется вероятность пересечения объектом ожидаемого пути базового транспортного средства, но также может возникнуть для устройства содействия при вождении, которое автоматически тормозит базовое транспортное средство в таком случае.
[0007] Настоящее изобретение предлагает устройство содействия при вождении, которое может привлекать внимание водителя базового транспортного средства более надлежащим образом, или автоматически тормозить базовое транспортное средство более надлежащим образом.
[0008] Аспект настоящего изобретения относится к устройству содействия при вождении, включающему в себя множество устройств датчиков и по меньшей мере один электронный блок управления. Устройства датчиков установлены в базовом транспортном средстве и выполнены с возможностью получать информацию о базовом транспортном средстве, включающую в себя параметр, представляющий состояние движения базового транспортного средства, и информацию об объекте, включающую в себя относительное положение объекта, присутствующего вокруг базового транспортного средства, относительно базового транспортного средства, направление движения объекта и скорость объекта. Электронный блок управления выполнен с возможностью определять, на основании информации о базовом транспортном средстве, движется ли базовое транспортное средство прямо. Когда электронный блок управления определяет, что базовое транспортное средство движется прямо, электронный блок управления выполнен с возможностью оценивать линейный путь конечной длины, продолжающийся в направлении движения базового транспортного средства от базового транспортного средства, как ожидаемый путь, на основании информации о базовом транспортном средстве. Электронный блок управления выполнен с возможностью определять, на основании информации об объекте, присутствует ли целевой объект, который является объектом, имеющим вероятность пересечения ожидаемого пути в пределах порогового периода времени, и определять, имеет ли место ситуация движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта. Электронный блок управления выполнен с возможностью генерировать сигнал запроса содействия при вождении, когда электронный блок управления определяет, что целевой объект присутствует, и что ситуация движения транспорта не имеет место, и запрещает генерирование сигнала запроса содействия при вождении, когда электронный блок управления определяет, что целевой объект присутствует, и что ситуация движения транспорта имеет место. Электронный блок управления выполнен с возможностью выполнять, в ответ на сигнал запроса содействия при вождении, содействие при вождении, состоящее в по меньшей мере одном из содействия привлечения внимания и содействия автоматического торможения, при этом содействие привлечения внимания привлекает внимание водителя к целевому объекту, а содействие автоматического торможения автоматически тормозит базовое транспортное средство.
[0009] Согласно аспекту настоящего изобретения, электронный блок управления определяет, присутствует ли целевой объект, который является объектом, имеющим вероятность пересечения ожидаемого пути базового транспортного средства в пределах порогового периода времени. Когда электронный блок управления определяет, что целевой объект присутствует, электронный блок управления выполняет содействие при вождении, состоящее в привлечении внимания водителя базового транспортного средства и/или в автоматическом торможении базового транспортного средства. Например, когда имеет места ситуация движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта, фактически, целевой объект имеет очень низкую вероятность пересечения ожидаемого пути базового транспортного средства в пределах порогового периода времени, даже когда электронный блок управления определяет, что целевой объект присутствует (то есть, даже когда электронный блок управления выполняет содействие при вождении). Выполнение содействия при вождении в таком случае является излишним и может вызывать у водителя ощущение неудобства. Таким образом, даже когда электронный блок управления определяет, что целевой объект присутствует, предпочтительно не выполнять содействие при вождении, если фактически целевой объект имеет очень низкую вероятность пересечения ожидаемого пути базового транспортного средства в пределах порогового периода времени из-за состояния вокруг базового транспортного средства.
[0010] Следовательно, устройство содействия при вождении согласно аспекту настоящего изобретения дополнительно включает в себя электронный блок управления, который определяет, имеет ли место ситуация движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта. Электронный блок управления выполнен с возможностью запрещать генерирование сигнала запроса содействия при вождении, когда электронный блок управления определяет, что целевой объект присутствует и что ситуация движения транспорта имеет место.
[0011] Согласно аспекту настоящего изобретения, электронный блок управления определяет, имеет ли место ситуация движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта. Когда электронный блок управления определяет, что ситуация движения транспорта имеет место, электронный блок управления запрещает привлечение внимания и/или автоматическое торможение, даже когда электронный блок управления определяет, что присутствует целевой объект. Когда имеет место ситуация движения транспорта, целевой объект имеет очень низкую вероятность пересечения ожидаемого пути базового транспортного средства в пределах порогового периода времени. Соответственно, когда целевой объект фактически имеет очень низкую вероятность пересечения ожидаемого пути базового транспортного средства в пределах порогового периода времени из-за возникновения ситуации движения транспорта, устройство содействия при вождении может запрещать привлечение внимания и/или автоматическое торможение, даже если устройство содействия при вождении определяет, что присутствует целевой объект. Таким образом, устройство содействия при вождении может существенно снизить вероятность выполнения ненужного привлечения внимания и/или автоматического торможения, и может более надлежащим образом привлекать внимание водителя базового транспортного средства или автоматически тормозить базовое транспортное средство более надлежащим образом.
[0012] В устройстве содействия при вождении согласно аспекту настоящего изобретения, электронный блок управления может быть выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, объект одинакового направления, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в области одинакового направления, установленной заранее вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости одинакового направления, при этом угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления. Электронный блок управления может выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, объект противоположного направления, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в области противоположного направления, установленной заранее вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости противоположного направления, при этом угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления. Электронный блок управления может быть выполнен с возможностью определять, что ситуация движения транспорта имеет место, когда значение, основанное на сумме количества объектов одинакового направления и количества объектов противоположного направления, больше или равно предопределенному значению.
[0013] Согласно аспекту настоящего изобретения, объект одинакового направления движется с угловым сдвигом относительно направления движения базового средства, и угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления, на основании информации о базовом транспортном средстве и информации об объекте. Таким образом, направление движения объекта одинакового направления пересекается с направлением движения целевого объекта. Объект одинакового направления движется в области одинакового направления, установленной вокруг базового транспортного средства, в пределах предопределенного диапазона скорости одинакового направления. Объект противоположного направления движется с угловым сдвигом относительно направления движения базового средства, и угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления, на основании информации о базовом транспортном средстве и информации об объекте. Таким образом, направление движения объекта противоположного направления пересекается с направлением движения целевого объекта. Объект противоположного направления движется в области противоположного направления, установленной вокруг базового транспортного средства, в пределах предопределенного диапазона скорости противоположного направления. Таким образом, считается, что присутствие объекта одинакового направления и объекта противоположного направления препятствует движению целевого объекта. Соответственно, посредством использования конфигурации определения того, что имеет место ситуация движения транспорта, когда значение, основанное на сумме количества объектов одинакового направления и количества объектов противоположного направления, больше или равно предопределенному значению, определение того, имеет ли место ситуация движения транспорта, может быть выполнено надлежащим образом.
[0014] В устройстве содействия при вождении согласно аспекту настоящего изобретения, электронный блок управления может быть выполнен с возможностью определять, присутствует ли среди целевых объектов левый целевой объект, приближающийся к ожидаемому пути с левой стороны от направления движения базового транспортного средства. Электронный блок управления может быть выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, левосторонний объект одинакового направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в левосторонней области одинакового направления, установленной с левой стороны от направления движения базового транспортного средства вокруг транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости одинакового направления, при этом угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления. Электронный блок управления может быть выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, левосторонний объект противоположного направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в левосторонней области противоположного направления, установленной с левой стороны от направления движения базового транспортного средства вокруг транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости противоположного направления, при этом угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления. Электронный блок управления может быть выполнен с возможностью определять, что левая ситуация движения транспорта, которое является ситуацией движения транспорта относительно левого целевого объекта, имеет место, когда значение, основанное на сумме количества левосторонних объектов одинакового направления в области и количества левосторонних объектов противоположного направления в области, больше или равно предопределенному значению. Электронный блок управления может быть выполнен с возможностью запрещать генерирование сигнала запроса содействия при вождении для левого целевого объекта, когда электронный блок управления определяет, что присутствует левый целевой объект и что левая ситуация движения транспорта имеет место.
[0015] Согласно аспекту настоящего изобретения, левосторонний объект одинакового направления в области движется с угловым сдвигом относительно направления движения базового средства, и угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления, на основании информации о базовом транспортном средстве и информации об объекте. Таким образом, направление движения левостороннего объекта одинакового направления в области пересекается с направлением движения левого целевого объекта. Левосторонний объект одинакового направления движется в левосторонней области одинакового направления, установленной с левой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, в пределах предопределенного диапазона скорости одинакового направления. Левосторонний объект противоположного направления в области движется с угловым сдвигом относительно направления движения базового средства, и угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления, на основании информации о базовом транспортном средстве и информации об объекте. Таким образом, направление движения левостороннего объекта противоположного направления в области пересекается с направлением движения левого целевого объекта. Левосторонний объект противоположного направления движется в левосторонней области противоположного направления, установленной с левой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, в пределах предопределенного диапазона скорости противоположного направления. Таким образом, считается, что присутствие левостороннего объекта одинакового направления в области и левостороннего объекта противоположного направления в области препятствует движению левого целевого объекта. Соответственно, посредством использования конфигурации определения того, что имеет место левая ситуация движения транспорта, когда значение, основанное на сумме количества левосторонних объектов одинакового направления в области и количества левосторонних объектов противоположного направления в области, больше или равно предопределенному значению, определение того, имеет ли место левая ситуация движения транспорта, может быть выполнено надлежащим образом.
[0016] В устройстве содействия при вождении согласно аспекту настоящего изобретения, электронный блок управления может быть выполнен с возможностью определять, присутствует ли среди целевых объектов правый целевой объект, приближающийся к ожидаемому пути с правой стороны от направления движения базового транспортного средства. Электронный блок управления может быть выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, правосторонний объект одинакового направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в правосторонней области одинакового направления, установленной с правой стороны от направления движения базового транспортного средства вокруг транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости одинакового направления, при этом угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления. Электронный блок управления может быть выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, правосторонний объект противоположного направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в правосторонней области противоположного направления, установленной с правой стороны от направления движения базового транспортного средства вокруг транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости противоположного направления, при этом угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления. Электронный блок управления может быть выполнен с возможностью определять, что правая ситуация движения транспорта, которая является ситуацией движения транспорта относительно правого целевого объекта, имеет место, когда значение, основанное на сумме количества правосторонних объектов одинакового направления в области и количества правосторонних объектов противоположного направления в области, больше или равно предопределенному значению. Электронный блок управления может быть выполнен с возможностью запрещать генерирование сигнала запроса содействия при вождении для правого целевого объекта, когда электронный блок управления определяет, что присутствует правый целевой объект и что правая ситуация движения транспорта имеет место.
[0017] Согласно аспекту настоящего изобретения, правосторонний объект одинакового направления в области движется с угловым сдвигом относительно направления движения базового средства, и угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления. Таким образом, направление движения правостороннего объекта одинакового направления в области пересекается с направлением движения правого целевого объекта. Правосторонний объект одинакового направления движется в правосторонней области одинакового направления, установленной с правой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, в пределах предопределенного диапазона скорости одинакового направления. Правосторонний объект противоположного направления в области движется с угловым сдвигом относительно направления движения базового средства, и угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления. Таким образом, направление движения правостороннего объекта противоположного направления в области пересекается с направлением движения правого целевого объекта. Правосторонний объект противоположного направления движется в правосторонней области противоположного направления, установленной с правой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, в пределах предопределенного диапазона скорости противоположного направления. Таким образом, считается, что присутствие правостороннего объекта одинакового направления в области и правостороннего объекта противоположного направления в области препятствует движению правого целевого объекта. Соответственно, посредством использования конфигурации определения того, что имеет место правая ситуация движения транспорта, когда значение, основанное на сумме количества правосторонних объектов одинакового направления в области и количества правосторонних объектов противоположного направления в области, больше или равно предопределенному значению, определение того, имеет ли место правая ситуация движения транспорта, может быть выполнено надлежащим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Признаки, преимущества, техническая и промышленная значимость примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых схожие номера ссылок обозначают схожие элементы, и на которых:
Фиг. 1 - схема, иллюстрирующая устройство содействия при вождении согласно первому варианту осуществления настоящего изобретения (далее в материалах настоящей заявки, указываемое ссылкой, как "первое осуществленное устройство") и транспортное средство, к которому применено устройство содействия при вождении;
Фиг. 2 - схема, иллюстрирующая координатные оси, которые установлены первым осуществленным устройством вокруг базового транспортного средства на n-ом цикле;
Фиг. 3 - схема, которая иллюстрирует относительное положение между базовым транспортным средством и объектом на (n-1)-ом цикле и n-ом цикле и используется для описания получения вектора скорости объекта на n-ом цикле;
Фиг. 4 - схема, которая иллюстрирует относительное положение на дороге между базовым транспортным средством и объектом, присутствующим вокруг базового транспортного средства на n-ом цикле, и используется для описания присутствия или отсутствия целевого объекта на n-ом цикле;
Фиг. 5 - схема, иллюстрирующая левостороннюю область одинакового направления и правостороннюю область одинакового направления, и левостороннюю область противоположного направления и правостороннюю область противоположного направления, которые установлены первым осуществленным устройством вокруг базового транспортного средства на n-ом цикле;
Фиг. 6 - схема, используемая для описания расчета углового сдвига между направлением движения базового транспортного средства и направлением движения объекта на n-ом цикле;
Фиг. 7 - схема, которая иллюстрирует состояние, в котором четыре области, проиллюстрированные на фиг. 5, установлены вокруг базового транспортного средства, проиллюстрированного на фиг. 4, и используется для описания того, имеет ли место ситуация движения транспорта на n-ом цикле;
Фиг. 8 - блок-схема (1) последовательности операций, иллюстрирующая программу, исполняемую ЦП ЭБУ содействия при вождении первого осуществленного устройства (далее в материалах настоящей заявки, указываемого ссылкой, как "ЦП первого осуществленного устройства");
Фиг. 9 - блок-схема (2) последовательности операций, иллюстрирующая программу, исполняемую ЦП первого осуществленного устройства;
Фиг. 10 - блок-схема (3) последовательности операций, иллюстрирующая программу, исполняемую ЦП первого осуществленного устройства;
Фиг. 11 - блок-схема (4) последовательности операций, иллюстрирующая программу, исполняемую ЦП первого осуществленного устройства;
Фиг. 12 - схема, иллюстрирующая область одинакового направления и область противоположного направления, которые установлены устройством содействия при вождении согласно второму варианту осуществления настоящего изобретения (далее в материалах настоящей заявки, указываемым ссылкой, как "второе осуществленное устройство") вокруг базового транспортного средства на n-ом цикле;
Фиг. 13 - блок-схема (1) последовательности операций, иллюстрирующая программу, исполняемую ЦП ЭБУ содействия при вождении второго осуществленного устройства (далее в материалах настоящей заявки, указываемого ссылкой, как "ЦП второго осуществленного устройства");
Фиг. 14 - блок-схема (2) последовательности операций, иллюстрирующая программу, исполняемую ЦП второго осуществленного устройства;
Фиг. 15 - блок-схема (3) последовательности операций, иллюстрирующая программу, исполняемую ЦП второго осуществленного устройства; и
Фиг. 16 - схема, используемая для описания привлечения внимания, когда целевой объект является призрачным объектом.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Первый вариант осуществления
[0019] Далее в материалах настоящей заявки, устройство содействия при вождении согласно первому варианту осуществления настоящего изобретения (далее в материалах настоящей заявки, указываемое ссылкой, как "первое осуществленное устройство") будет описано со ссылкой на чертежи. Первое осуществленное устройство применено к базовому транспортному средству 100, проиллюстрированному на фиг. 1. Базовое транспортное средство 100 является автомобилем, который содержит двигатель, не проиллюстрированный, в качестве источника энергии. Первое осуществленное устройство включает в себя ЭБУ (electronic control unit, электронный блок управления) 10 содействия при вождении (один из примеров электронного блока управления) и ЭБУ 20 отображения.
[0020] ЭБУ является сокращением для электронного блока управления. Каждый из ЭБУ 10 содействия при вождении и ЭБУ 20 отображения является электронной схемой управления, которая содержит главный компонент микрокомпьютера, включающего в себя ЦП (центральный процессор, CPU), ПЗУ (постоянное запоминающее устройство, ROM), ОЗУ (оперативное запоминающее устройство, RAM), интерфейс, и тому подобное. ЦП осуществляет различные функции, описанные ниже, посредством исполнения команд (процедур), сохраненных в памяти (ПЗУ). ЭБУ 10 содействия при вождении и ЭБУ 20 отображения могут быть объединены в один ЭБУ.
[0021] ЭБУ 10 содействия при вождении и ЭБУ 20 отображения соединены друг с другом через локальную сеть контроллеров (CAN) 90 системы связи и датчиков с возможностью обмена данными (с возможностью обмена информацией).
[0022] Базовое транспортное средство 100 включает в себя датчик 11 скорости транспортного средства, датчик 12 скорости вращения колес, датчик 13 скорости рыскания, датчик 14 радара и устройство 21 отображения. Датчики с 11 по 14 соединены с ЭБУ 10 содействия при вождении, а устройство 21 отображения соединено с ЭБУ 20 отображения. Несмотря на то, что базовое транспортное средство 100 включает в себя множество датчиков, детектирующих состояние движения базового транспортного средства 100 вдобавок к датчикам с 11 по 14, настоящий вариант осуществления будет описывать датчики, связанные с конфигурацией устройства содействия при вождении, раскрытого в настоящей спецификации.
[0023] Датчик 11 скорости транспортного средства детектирует скорость (скорость транспортного средства) SPDv [м/с] базового транспортного средства 100 и выводит сигнал, обозначающий скорость SPDv транспортного средства, на ЭБУ 10 содействия при вождении. ЭБУ 10 содействия при вождении получает скорость SPDv транспортного средства на основании сигнала, принятого с датчика 11 скорости транспортного средства, каждый раз, когда истекает предопределенный расчетный период времени Tcal [с].
[0024] Датчик 12 скорости вращения колес расположен на каждом из правого и левого передних колес (не проиллюстрированы) базового транспортного средства 100. Каждый датчик 12 скорости вращения колес детектирует частоту WS вращения [об/с] каждого колеса и выводит сигнал, обозначающий частоту WS вращения, на ЭБУ 10 содействия при вождении. ЭБУ 10 содействия при вождении получает частоту WS вращения транспортного средства на основании сигнала, принятого с датчика 12 скорости вращения колес, каждый раз, когда истекает предопределенный расчетный период времени Tcal. ЭБУ 10 содействия при вождении может получать скорость SPDv [м/с] на основании частоты WS вращения.
[0025] Датчик 13 скорости рыскания детектирует угловую скорость (скорость рыскания) Y [°/с] базового транспортного средства 100 и выводит сигнал, обозначающий скорость Y рыскания, на ЭБУ 10 содействия при вождении. ЭБУ 10 содействия при вождении получает скорость Y рыскания на основании сигнала, принятого с датчика 13 скорости рыскания, каждый раз, когда истекает предопределенный расчетный период времени Tcal.
[0026] Датчик 14 радара расположен на каждом из левого конца и правого конца передней части базового транспортного средства 100 и на каждом из левого конца и правого конца задней части базового транспортного средства 100. Каждый датчик 14 радара передает электромагнитную волну в переднем левом диагональном направлении, переднем правом диагональном направлении, левом заднем диагональном направлении и правом заднем диагональном направлении базового транспортного средства 100. Когда тело, такое как другое транспортное средство или пешеход, присутствует в пределах диапазона достижения электромагнитной волны (далее в материалах настоящей заявки, указываемой ссылкой, как "передаваемая волна"), передаваемая волна отражается телом. Каждый датчик 14 радара принимает отраженную переданную волну (далее в материалах настоящей заявки, указываемую ссылкой, как "отраженная волна"). Каждый датчик 14 радара выводит сигнал, обозначающий переданную волну, и сигнал, обозначающий отраженную волну, на ЭБУ 10 содействия при вождении. Далее в материалах настоящей заявки, тело, которое присутствует в пределах диапазона достижения электромагнитной волны, будет указано ссылкой, как "объект".
[0027] ЭБУ 10 содействия при вождении определяет, присутствует ли объект, имеющий вероятность пересечения ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени (описано ниже). Когда ЭБУ 10 содействия при вождении определяет, что объект присутствует, ЭБУ 10 содействия при вождении генерирует сигнал запроса привлечения внимания, чтобы привлечь внимание водителя базового транспортного средства 100 к объекту, и передает сигнал запроса привлечения внимания на ЭБУ 20 отображения. Далее в материалах настоящей заявки, сигнал запроса привлечения внимания будет просто указан ссылкой, как "сигнал запроса".
[0028] Устройство 21 отображения является устройством отображения, которое расположено в положении, визуально различимом из положения водительского сиденья базового транспортного средства 100 (например, на приборной панели). Когда ЭБУ 20 отображения принимает сигнал запроса с ЭБУ содействия при вождении, ЭБУ 20 отображения передает командный сигнал на устройство 21 отображения. Когда устройство 21 отображения принимает командный сигнал с ЭБУ 20 отображения, устройство 21 отображения отображает информацию, с тем чтобы привлечь внимание водителя. Устройство 21 отображения может являться проекционным дисплеем на лобовом стекле, центральным дисплеем или тому подобным.
Сущность работы первого осуществленного устройства
[0029] Далее будет описана сущность работы первого осуществленного устройства. Первое осуществленное устройство выполняет два типа определения, определение целевого объекта и определение ситуации движения транспорта, описанные ниже вместе друг с другом. Определение целевого объекта является определением того, присутствует ли объект, имеющий вероятность пересечения ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени (далее в материалах настоящей заявки, указываемый ссылкой, как "целевой объект"). Определение ситуации движения транспорта является определением того, имеет ли место ситуации движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта. Первое осуществленное устройство определяет, стоит ли привлекать внимание (то есть, стоит ли генерировать сигнал запроса) на основании результата двух определений.
A. Общая работа при определении целевого объекта и определении ситуации движения транспорта
[0030] Сначала будет описана общая работа при определении целевого объекта и определении ситуации движения транспорта. Когда переключатель двигателя (переключатель ключа замка зажигания), не проиллюстрированный, базового транспортного средства 100 переключают в состояние ВКЛ, первое осуществленное устройство получает, перед переключением переключателя двигателя в состояние ВЫКЛ, информацию о базовом транспортном средстве 100 (информацию о базовом транспортном средстве) каждый раз, когда истекает предопределенный расчетный период времени Tcal, устанавливает координатные оси на основании информации о базовом транспортном средстве, с текущим положением базового транспортного средства 100 в качестве начала координат, и рассчитывает вектор a скорости базового транспортного средства 100, координаты относительного положения P объекта, и вектор b скорости объекта. Далее в материалах настоящей заявки, период, в котором переключатель двигателя переключают из состояния ВКЛ в состояние ВЫКЛ, будет указан ссылкой, как "период двигателя в состоянии ВКЛ". Для любого элемента e, элемент e на n-ом цикле расчета будет обозначен, как e(n), и момент времени, когда переключатель двигателя переключают в состояние ВКЛ, будет определен, как n=0. Базовое транспортное средство 100 может являться, например, гибридным транспортным средством или электрическим транспортным средством. В таком случае, для переключателя запуска (например, переключателя готовности), который устанавливает базовое транспортное средство 100 в состояние, в котором оно может передвигаться, переключение переключателя запуска в состояние ВКЛ имеет такое же значение, как и переключение переключателя двигателя в состояние ВКЛ. Переключение переключателя запуска в состояние ВЫКЛ имеет такое же значение, как и переключение переключателя двигателя в состояние ВЫКЛ.
Получение информации о базовом транспортном средстве и установка координатных осей
[0031] ЭБУ 10 содействия при вождении первого осуществленного устройства получает скорость SPDv(n) транспортного средства, скорость WS(n) вращения колес и скорость Y(n) рыскания в качестве информации о базовом транспортном средстве на основании сигналов, принятых с датчика 11 скорости транспортного средства, датчика 12 скорости вращения колес и датчика 13 скорости рыскания, и сохраняет информацию о базовом транспортном средстве в ОЗУ ЭБУ 10 содействия при вождении. ЭБУ 10 содействия при вождении устанавливает координатные оси на основании информации о базовом транспортном средстве, с текущим положением базового транспортного средства 100 в качестве начала координат. В частности, как проиллюстрировано на фиг. 2, ЭБУ 10 содействия при вождении устанавливает центр передней части базового транспортного средства 100 на n-ом цикле в качестве начала координат O(n) (0,0) на n-ом цикле, устанавливает ось x в направлении TDv(n) движения базового транспортного средства 100 на n-ом цикле, и устанавливает ось y в направлении, которое проходит через начало координат O(n) и перпендикулярно относительно направления TDv(n) движения. Ось x имеет направление TDv(n) движения в качестве положительного направления, а ось y имеет левое направление базового транспортного средства 100 в качестве положительного направления. Направление TDv(n) движения рассчитывается из скорости SPDv(n) транспортного средства и скорости Y(n) рыскания на n-ом цикле. Направление движения может быть рассчитано из скорости WS(n) вращения колес и радиуса R(n) поворота на n-ом цикле (то есть, значение рассчитывается на основании скорости SPDv(n) транспортного средства и скорости Y(n) рыскания). ЭБУ 10 содействия при вождении сохраняет информацию, обозначающую координатные оси, в ОЗУ ЭБУ 10 содействия при вождении. Единицами измерения компонента x и компонента y в координатной плоскости xy являются [м].
Получение вектора a скорости транспортного средства
[0032] ЭБУ 10 содействия при вождении рассчитывает вектор a(n) скорости базового транспортного средства 100 на n-ом цикле (вектор a(n) скорости транспортного средства), как вектор, имеющий величину скорости SPDv(n) базового транспортного средства 100 на n-ом цикле и имеющий направление, совпадающее с направлением TDv(n) движения базового транспортного средства 100 на n-ом цикле (ссылка на фиг. 2). Вектор a(n) скорости транспортного средства является вектором, имеющим компонент x, равный SPDv(n), и компонент y, равный нулю. ЭБУ 10 содействия при вождении сохраняет вектор a(n) скорости транспортного средства в ОЗУ ЭБУ 10 содействия при вождении.
Получение информации об объекте
[0033] ЭБУ 10 содействия при вождении определяет, присутствует ли объект вокруг базового транспортного средства 100, на основании сигналов, принятых с каждого датчика 14 радара. Когда ЭБУ 10 содействия при вождении определяет, что объект присутствует, ЭБУ 10 содействия при вождении получает расстояние от базового транспортного средства 100 до объекта и азимут объекта относительно базового транспортного средства 100. ЭБУ 10 содействия при вождении рассчитывает координаты (x(n),y(n)) относительного положения P(n) объекта на n-ом цикле относительно положения базового транспортного средства 100 на n-ом цикле (то есть, начала координат O(n)) на основании расстояния и азимута объекта на n-ом цикле. Вдобавок, как проиллюстрировано на фиг. 3, ЭБУ 10 содействия при вождении рассчитывает, посредством следующей процедуры, направление TDo(n) движения и скорость SPDo(n) [м/с] объекта 200, который является одним из примеров объекта, на n-ом цикле, и получает вектор b(n) скорости объекта 200 на n-ом цикле (вектор b(n) скорости объекта) на основании направления TDo(n) движения и скорости SPDo(n) [м/с] объекта 200. На фиг. 3, базовое транспортное средство 100 и объект 200 на n-ом цикле проиллюстрированы сплошными линиями, а базовое транспортное средство 100 и объект 200 на (n-1)-ом цикле проиллюстрированы пунктирными линиями.
Расчет направления TDo движения объекта
[0034] Сначала, ЭБУ 10 содействия при вождении рассчитывает вектор p(n) положения относительного положения P(n) объекта 200 на n-ом цикле и вектор p(n-1) положения относительного положения P(n-1) объекта 200 на (n-1)-ом цикле посредством Общей формулы (1) и Общей формулы (2).
p(n) = (x(n),y(n))... (1)
p(n-1) = (x(n-1),y(n-1))... (2)
Как очевидно из Общей формулы (1) и Общей формулы (2), компоненты вектора p(n) положения равны координатам относительного положения P(n) объекта 200 на n-ом цикле, а компоненты вектора p(n-1) положения равны координатам относительного положения P(n-1) объекта 200 на (n-1)-ом цикле. То есть, вектор p(n) положения является вектором, имеющим начало координат O(n) на n-ом цикле в качестве начальной точки, и вектор p(n-1) положения является вектором, имеющим начало координат O(n-1) на (n-1)-ом цикле в качестве начальной точки. Таким образом, два вектора имеют разные начальные точки. Соответственно, ЭБУ 10 содействия при вождении преобразует вектор p(n-1) положения в вектор pc(n-1), имеющий начало координат O(n) на n-ом цикле в качестве начальной точки, посредством Общей формулы (3).
pc(n-1) = p(n-1) - O(n-1)O(n)... (3)
Вектор O(n-1)O(n) является вектором от начала координат O(n-1) на (n-1)-ом цикле до начала координат O(n) на n-ом цикле. Вектор O(n-1)O(n) является вектором, который имеет величину значения, получаемого посредством умножения скорости SPDv(n-1) базового транспортного средства 100 на (n-1)-ом цикле на расчетный период времени Tcal, и имеет направление, совпадающее с направлением TDv(n-1) движения на (n-1)-ом цикле.
[0035] ЭБУ 10 содействия при вождении рассчитывает направление сдвига объекта 200 от (n-1)-ого цикла до n-ого цикла посредством вычитания Общей формулы (3) из Общей формулы (1) посредством Общей формулы (4).
p(n) - pc(n-1) = p(n) - p(n-1) + O(n-1)O(n)... (4)
ЭБУ 10 содействия при вождении рассчитывает направление сдвига объекта, представленное Общей формулой (4), как направление TDo(n) движения объекта 200 на n-ом цикле.
Расчет скорости SPDo объекта
[0036] Далее, ЭБУ 10 содействия при вождении рассчитывает скорость SPDo(n) объекта 200 на n-ом цикле посредством Общей формулы (5). Величина вектора X обозначена abs{X}.
SPDo(n) = abs{p(n) - p(n-1) + O(n-1)O(n)}/Tcal... (5)
То есть, ЭБУ 10 содействия при вождении рассчитывает, в качестве скорости SPDo(n) объекта 200 на n-ом цикле, значение, получаемое посредством деления величины сдвига (abs{p(n) - p(n-1) + O(n-1)O(n)}) объекта 200 от (n-1)-ого цикла до n-ого цикла на расчетный период времени Tcal.
Получение вектора b скорости объекта
[0037] ЭБУ 10 содействия при вождении рассчитывает вектор b(n) скорости объекта на n-ом цикле, как вектор, имеющий величину скорости SPDo(n) объекта на n-ом цикле и имеющий направление, совпадающее с направлением TDo(n) движения объекта на n-ом цикле. ЭБУ 10 содействия при вождении сохраняет координаты относительного положения P(n) и вектор b(n) скорости объекта в ОЗУ ЭБУ 10 содействия при вождении в качестве информации об объекте. Когда каждый датчик 14 радара выводит сигналы, отраженные одним объектом, на ЭБУ 10 содействия при вождении, ЭБУ 10 содействия при вождении получает информацию об объекте, как относящуюся к одному объекту, на основании сигналов.
B. Работа, связанная с определением целевого объекта
[0038] Далее будет описана работа, связанная с определением целевого объекта. Когда двигатель находится в состоянии ВКЛ, или каждый раз, когда истекает расчетный период времени Tcal, ЭБУ 10 содействия при вождении оценивает ожидаемые пути базового транспортного средства 100 и объекта и определяет, присутствует ли объект, который пересекается с ожидаемым путем базового транспортного средства 100 в пределах порогового периода времени. Когда ЭБУ 10 содействия при вождении определяет, что такой объект присутствует, ЭБУ 10 содействия при вождении определяет, что объект требует внимания, и устанавливает значение флага привлечения внимания на 1 для объекта. Когда ЭБУ 10 содействия при вождении определяет, что объект не присутствует, ЭБУ 10 содействия при вождении определяет, что объект не требует внимания, и устанавливает значение флага привлечения внимания на 0 для объекта.
Оценка левостороннего ожидаемого пути и правостороннего ожидаемого пути базового транспортного средства 100.
[0039] ЭБУ 10 содействия при вождении оценивает ожидаемый путь, по которому, как ожидается, пройдет левый конец OL(n) (ссылка на фиг. 4) передней части базового транспортного средства 100 (левосторонний ожидаемый путь), и ожидаемый путь, по которому как ожидается, пройдет правый конец OR(n) (ссылка на фиг. 4) передней части базового транспортного средства 100 (правосторонний ожидаемый путь). ЭБУ 10 содействия при вождении рассчитывает левосторонний ожидаемый путь на n-ом цикле в координатной плоскости xy, как часть линии, представленной формулой fL(n) левостороннего ожидаемого пути, проиллюстрированной в Общей формуле (6). Часть имеет конечную длину (7 м в настоящем примере) от базового транспортного средства 100. ЭБУ 10 содействия при вождении рассчитывает правосторонний ожидаемый путь на n-ом цикле на координатной плоскости xy, как часть линии, представленной формулой fR(n) правостороннего ожидаемого пути, проиллюстрированной в Общей формуле (7). Часть имеет конечную длину (7 м в настоящем примере) от базового транспортного средства 100. Каждый ожидаемый путь является ожидаемым путем базового транспортного средства 100, когда оно едет прямо. Ширина (длина в направлении оси y) базового транспортного средства 100 обозначена w. Ширина w устанавливается заранее для каждого транспортного средства, в которое будет установлен ЭБУ 10 содействия при вождении.
Формула левостороннего ожидаемого пути fL(n): y=w/2 (x ≥ 0)... (6)
Формула правостороннего ожидаемого пути fR(n): y=-w/2 (x ≥ 0)... (7)
[0040] Как проиллюстрировано на фиг. 4, координаты левого конца OL(n) базового транспортного средства 100 на n-ом цикле составляют (0,w/2), а координаты правого конца OR(n) базового транспортного средства 100 на n-ом цикле составляют (0,-w/2). То есть, ЭБУ 10 содействия при вождении рассчитывает формулу fL(n) левостороннего ожидаемого пути, как формулу луча, продолжающегося в направлении TDv(n) движения базового транспортного средства 100 от левого конца OL(n) базового транспортного средства 100. ЭБУ 10 содействия при вождении рассчитывает формулу fR(n) правостороннего ожидаемого пути, как формулу луча, продолжающегося в направлении TDv(n) движения базового транспортного средства 100 от правого конца OR(n) базового транспортного средства 100. ЭБУ 10 содействия при вождении сохраняет формулы fL(n), fR(n) ожидаемого пути в ОЗУ ЭБУ 10 содействия при вождении.
Оценка ожидаемого пути объекта
[0041] ЭБУ 10 содействия при вождении оценивает ожидаемый путь, по которому, как ожидается, пройдет объект, на основании информации об объекте. ЭБУ 10 содействия при вождении рассчитывает формулу g(n) ожидаемого пути, как формулу луча, продолжающегося в направлении TDo(n) движения объекта от относительного положения P(n) объекта. Формула g(n) ожидаемого пути представляет ожидаемый путь объекта на n-ом цикле на координатной плоскости xy. Тела с A по G, проиллюстрированные на фиг. 4, являются телами, которые присутствуют в пределах диапазона достижения электромагнитной волны, передаваемой каждым датчиком 14 радара базового транспортного средства 100 на n-ом цикле (то есть, объектами). В примере по фиг. 4, на основании информации об объекте на n-ом цикле, ЭБУ 10 содействия при вождении рассчитывает формулы с ga(n) по gg(n) ожидаемого пути, соответственно, продолжающиеся в направлениях с TDoa(n) по TDog(n) движения объектов с A по G (ссылка на стрелки на фиг. от относительных положений с Pa(n) по Pg(n) объектов с A по G (далее в материалах настоящей заявки, формула g(n) ожидаемого пути будет просто указана ссылкой, как "формула g(n)"). ЭБУ 10 содействия при вождении сохраняет формулы с ga(n) по gg(n) в ОЗУ ЭБУ 10 содействия при вождении.
Условие пересечения и расчет координат пересечения Q
[0042] ЭБУ 10 содействия при вождении определяет, установлено ли условие пересечения. Условие пересечения состоит в том, что линия, представленная формулой g(n) объекта (каждой из формул с ga(n) по gg(n) в настоящем примере) пересекается как с линией, представленной формулой fL(n) левостороннего ожидаемого пути базового транспортного средства 100, так и с линией, представленной формулой fR(n) правостороннего ожидаемого пути базового транспортного средства 100. Когда ЭБУ 10 содействия при вождении определяет, что условие пересечения установлено, ЭБУ 10 содействия при вождении извлекает объект в качестве объектов, удовлетворяющих условию пересечения. ЭБУ 10 содействия при вождении рассчитывает координаты пересечения Q(n), в которых линия, представленная формулой g(n) извлеченного объекта, пересекается сначала с одной из линий, представленных формулой fL(n) левостороннего ожидаемого пути и формулой fR(n) правостороннего ожидаемого пути. Когда ЭБУ 10 содействия при вождении определяет, что условие пересечения не установлено, ЭБУ 10 содействия при вождении не извлекает объект. ЭБУ 10 содействия при вождении сохраняет результат извлечения и координаты пересечения Q(n) в ОЗУ ЭБУ 10 содействия при вождении. Как очевидно из описания, когда линия, представленная формулой g(n) объекта, пересекается с одной из двух линий (то есть, когда относительное положение P(n) объекта, имеющего направление TDo(n) движения, пересекающееся с направлением TDv(n) движения базового транспортного средства 100, расположено между двумя линиями), состояние пересечения не установлено.
[0043] В примере по фиг. 4, линия, представленная формулой gb(n) для объекта B, пересекается с обеими линиями, представленными формулой fL(n) левостороннего ожидаемого пути и формулой fR(n) правостороннего ожидаемого пути базового транспортного средства 100, и пересекается с линией, представленной формулой fL(n) левостороннего ожидаемого пути, в точке Qb(n) первой из обеих линий. Линия, представленная формулой gd(n) для объекта D, пересекается с обеими линиями, представленными формулой fL(n) левостороннего ожидаемого пути и формулой fR(n) правостороннего ожидаемого пути базового транспортного средства 100, и пересекается с линией, представленной формулой fR(n) правостороннего ожидаемого пути, в точке Qd(n) первой из обеих линий. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие пересечения установлено для объекта B и объекта D, и извлекает объект B и объект D в качестве объектов, удовлетворяющих условию пересечения. ЭБУ 10 содействия при вождении рассчитывает координаты пересечения Qb(n) объекта B и рассчитывает координаты пересечения Qd(n) для объекта D. Линии, представленные формулой ga(n) для объекта A, формула gc(n) для объекта C, и формулы с ge(n) по gg(n) для объектов с E по G, не пересекаются ни с одной из линий, представленных формулой fL(n) левостороннего ожидаемого пути и формулой fR(n) правостороннего ожидаемого пути. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие пересечения не установлено для объекта A, объекта C, для объектов с E по G, и не извлекает объект A, объект C и объекты с E по G.
Расчет расстояния d и условие длины
[0044] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве объекта, удовлетворяющего условию пересечения, ЭБУ 10 содействия при вождении рассчитывает расстояние d(n) [м] от базового транспортного средства 100 до пересечения Q(n) для объекта. Когда пересечение Q(n) расположено на левостороннем ожидаемом пути, ЭБУ 10 содействия при вождении рассчитывает расстояние d(n) в качестве расстояния от левого конца OL(n) базового транспортного средства 100 до пересечения Q(n). Когда пересечение Q(n) расположено на правостороннем ожидаемом пути, ЭБУ 10 содействия при вождении рассчитывает расстояние d(n) в качестве расстояния от правого конца OR(n) базового транспортного средства 100 до пересечения Q(n). ЭБУ 10 содействия при вождении сохраняет расстояние d(n) в ОЗУ ЭБУ 10 содействия при вождении. ЭБУ 10 содействия при вождении определяет, установлено ли условие длины. Условие длины состоит в том, что расстояние d(n) меньше или равно длине каждого ожидаемого пути базового транспортного средства 100 (7 м в настоящем примере). Когда ЭБУ 10 содействия при вождении определяет, что условие длины установлено, ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта, удовлетворяющего условию длины". Когда ЭБУ 10 содействия при вождении определяет, что условие длины не установлено, ЭБУ 10 содействия при вождении не извлекает объект. ЭБУ 10 содействия при вождении сохраняет результат извлечения в ОЗУ ЭБУ 10 содействия при вождении.
[0045] В примере по фиг. 4, в котором объект B и объект D извлечены в качестве объектов, удовлетворяющих условию пересечения, расстояние db(n) для объекта B от левого конца OL(n) базового транспортного средства 100 до пересечения Qb(n) меньше или равно длине левостороннего ожидаемого пути (ссылка на жирную линию на фиг. 4). Расстояние dd(n) для объекта D от правого конца OR(n) базового транспортного средства 100 до пересечения Qd(n) меньше или равно длине правостороннего ожидаемого пути (ссылка на жирную линию на фиг. 4). Соответственно, ЭБУ 10 содействия при вождении определяет, что условие пересечения установлено для объекта B и объекта D, и извлекает объект B и объект D в качестве объектов, удовлетворяющих условию длины.
Расчет периода времени t и условие периода времени
[0046] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве объекта, удовлетворяющего условию длины, ЭБУ 10 содействия при вождении рассчитывает период времени t(n), в течение которого объект, как ожидается, достигнет ожидаемого пути. ЭБУ 10 содействия при вождении рассчитывает период времени t(n) посредством деления "длины от относительного положения P(n) объекта до пересечения Q(n)" на "скорость SPDo(n) объекта". ЭБУ 10 содействия при вождении сохраняет период времени t(n) в ОЗУ ЭБУ 10 содействия при вождении. ЭБУ 10 содействия при вождении определяет, установлено ли условие периода времени. Условие периода времени состоит в том, что период времени t(n) меньше или равен пороговому периоду времени (4 секунды в настоящем примере). Когда ЭБУ 10 содействия при вождении определяет, что условие периода времени установлено, ЭБУ 10 содействия при вождении извлекает объект в качестве объекта, удовлетворяющего условию периода времени. Когда ЭБУ 10 содействия при вождении определяет, что условие периода времени не установлено, ЭБУ 10 содействия при вождении не извлекает объект. ЭБУ 10 содействия при вождении сохраняет результат извлечения в ОЗУ ЭБУ 10 содействия при вождении.
[0047] В примере по фиг. 4, ЭБУ 10 содействия при вождении рассчитывает период времени tb(n) и период времени td(n), соответственно, для объекта B и объекта D, которые извлечены в качестве объектов, удовлетворяющих состоянию длины. Период времени tb(n) рассчитывается посредством деления длины от относительного положения Pb(n) объекта B до пересечения Qb(n) на скорость SPDob(n) объекта B. Период времени td(n) рассчитывается таким же образом. Например, когда период времени tb(n)=2 секунды, а период времени td(n)=3 секунды, период времени tb(n) и период времени td(n) меньше или равны пороговому периоду времени. Таким образом, ЭБУ 10 содействия при вождении определяет, что условие периода времени установлено для объекта B и объекта D, и извлекает объект B и объект D в качестве объектов, удовлетворяющих условию периода времени.
Условие левостороннего положения
[0048] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве объекта, удовлетворяющего условию периода времени, ЭБУ 10 содействия при вождении определяет, установлено ли условие левостороннего положения. Условие левостороннего положения состоит в том, что координата y относительного положения P(n) объекта больше или равна w/2. Когда ЭБУ 10 содействия при вождении определяет, что условие левостороннего положения установлено, ЭБУ 10 содействия при вождении определяет, что относительное положение P(n) объекта расположено на левостороннем ожидаемом пути или с левой стороны от левостороннего ожидаемого пути, и определяет, что объект приближается с левой стороны от направления TDv(n) движения базового транспортного средства 100. В таком случае, ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта, удовлетворяющего условию левостороннего положения".
[0049] Когда ЭБУ 10 содействия при вождении определяет, что условие левостороннего положения не установлено, координата y относительного положения P(n) объекта, извлеченного в качестве объекта, удовлетворяющего условию периода времени, меньше или равна -w/2 по следующей причине. Таким образом, ЭБУ 10 содействия при вождении определяет, что относительное положение P(n) объекта расположено на правостороннем ожидаемом пути или с правой стороны от правостороннего ожидаемого пути, и определяет, что объект приближается с правой стороны от направления TDv(n) движения базового транспортного средства 100. То есть, определение условия левостороннего положения является определением, которое выполняется, когда установлено условие пересечения. Как описано в разделе "Условие пересечения и расчет координат пересечения Q", когда координата y относительного положения P(n) объекта больше, чем -w/2 и меньше, чем w/2, объект расположен между линией, представленной формулой fL(n) левостороннего ожидаемого пути, и линией, представленной формулой fR(n) правостороннего ожидаемого пути, и условие пересечения не установлено. Соответственно, определение условия левостороннего положения не выполнено, когда координата y относительного положения P(n) объекта больше -w/2 и меньше w/2. Соответственно, когда ЭБУ 10 содействия при вождении определяет, что условие левостороннего положения не установлено, координата y относительного положения P(n) объекта, извлеченного в качестве объекта, удовлетворяющего условию периода времени, меньше или равна -w/2. Когда ЭБУ 10 содействия при вождении определяет, что условие левостороннего положения не установлено, ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта, не удовлетворяющего условию периода времени". Далее в материалах настоящей заявки, "объект, расположенный с левой стороны или с правой стороны от направления TDv(n) движения базового транспортного средства 100", будет просто представлен, как "объект, расположенный с левой стороны или с правой стороны от базового транспортного средства 100".
[0050] В примере по фиг. 4, координата y относительного положения Pb(n) объекта B меньше или равна w/2, и состояние левостороннего положения установлено. Таким образом, ЭБУ 10 содействия при вождении определяет, что объект B приближается с левой стороны базового транспортного средства 100, и извлекает объект B в качестве объекта, удовлетворяющего условию левостороннего положения. Координата y относительного положения Pd(n) объекта D больше или равна -w/2, и состояние левостороннего положения не установлено. Таким образом, ЭБУ 10 содействия при вождении определяет, что объект D приближается с правой стороны базового транспортного средства 100, и извлекает объект D в качестве объекта, удовлетворяющего условию левостороннего положения.
[0051] Условие левостороннего положения может отличаться от этого условия, так, чтобы условие левостороннего положения было установлено, когда координата y пересечения Q(n) (то есть, пересечение, в котором линия, представленная формулой g(n) объекта, пересекается сначала с одной из линий, представленных формулами fL(n), fR(n) ожидаемого пути базового транспортного средства 100) составляет w/2. То есть, когда объект приближается с левой стороны базового транспортного средства 100, линия, представленная формулой g(n), пересекается сначала с линией, представленной формулой fL(n) левостороннего ожидаемого пути (y=w/2 (x ≥ 0)). Таким образом, координата y пересечения Q(n) составляет w/2, и состояние левостороннего положения установлено. Когда объект приближается с правой стороны базового транспортного средства 100, линия, представленная формулой g(n), пересекается сначала с линией, представленной формулой fR(n) правостороннего ожидаемого пути (y=-w/2 (x ≥ 0)). Таким образом, координата y пересечения Q(n) составляет -w/2, и состояние левостороннего положения не установлено. Такая конфигурация также обеспечивает возможность надлежащего определения того, приближается ли объект с левой стороны или с правой стороны базового транспортного средства 100.
Установка флага привлечения внимания
[0052] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве объекта, удовлетворяющего условию левостороннего положения (то есть, когда ЭБУ 10 содействия при вождении определяет, что объект приближается с левой стороны базового транспортного средства 100), ЭБУ 10 содействия при вождении определяет, что объект имеет вероятность пересечения левостороннего ожидаемого пути в пределах порогового периода времени. ЭБУ 10 содействия при вождении устанавливает значение флага левостороннего привлечения внимания на 1 и устанавливает значение флага правостороннего привлечения внимания на 0 для объекта. Флаг левостороннего привлечения внимания и флаг правостороннего привлечения внимания являются одним из примеров флага привлечения внимания. Когда ЭБУ 10 содействия при вождении извлекает объект в качестве объекта, не удовлетворяющего условию левостороннего положения (то есть, когда ЭБУ 10 содействия при вождении определяет, что объект приближается с правой стороны базового транспортного средства 100), ЭБУ 10 содействия при вождении определяет, что объект имеет вероятность пересечения правостороннего ожидаемого пути в пределах порогового периода времени. ЭБУ 10 содействия при вождении устанавливает значение флага правостороннего привлечения внимания на 1 и устанавливает значение флага левостороннего привлечения внимания на 0 для объекта. Когда ЭБУ 10 содействия при вождении не извлекает объект в качестве объекта, удовлетворяющего всем из условия пересечения, условия длины и условия периода времени (то есть, целевого объекта), ЭБУ 10 содействия при вождении определяет, что объект имеет очень низкую вероятность пересечения каждого ожидаемого пути в пределах порогового периода времени, и устанавливает значение флага левостороннего привлечения внимания и значение флага правостороннего привлечения внимания на 0 для объекта. Как очевидно из описания, значения флага левостороннего привлечения внимания и флага правостороннего привлечения внимания не установлены на 1 одновременно для объекта. ЭБУ 10 содействия при вождении сохраняет значение флага привлечения внимания, установленное для каждого объекта, в ОЗУ ЭБУ 10 содействия при вождении.
[0053] В примере по фиг. 4, ЭБУ 10 содействия при вождении устанавливает значение флага левостороннего привлечения внимания на 1 и устанавливает значение флага правостороннего привлечения внимания на 0 для объекта B, который извлечен в качестве объекта, удовлетворяющего условию левостороннего положения. ЭБУ 10 содействия при вождении устанавливает значение флага правостороннего привлечения внимания на 1 и устанавливает значение флага левостороннего привлечения внимания на 0 для объекта D, который извлечен в качестве объекта, не удовлетворяющего условию левостороннего положения. ЭБУ 10 содействия при вождении устанавливает значение флага левостороннего привлечения внимания на и значение флага правостороннего привлечения внимания на 0 для объекта A, объекта C и объектов с E по G, которые не извлечены в качестве объектов, удовлетворяющих условию пересечения.
B. Работа, связанная с определением ситуации движения транспорта
[0054] Далее будет описана работа, связанная с определением ситуации движения транспорта. Когда двигатель находится в состоянии ВКЛ, или каждый раз, когда истекает расчетный период времени Tcal, ЭБУ 10 содействия при вождении устанавливает область, имеющую предопределенный размер, вокруг базового транспортного средства 100. ЭБУ 10 содействия при вождении подсчитывает, среди объектов, присутствующих в предопределенной области, количество объектов, движущихся в направлении, приблизительно параллельном направлению TDv движения базового транспортного средства 100 в пределах предопределенного диапазона скорости. Когда ЭБУ 10 содействия при вождении определяет, что общее количество объектов, которое является суммой количества объектов в предопределенном периоде, больше или равно предопределенному пороговому значению (пороговому количеству объектов), ЭБУ 10 содействия при вождении определяет, что имеет место ситуация, в которой объекты препятствуют движению целевого объекта (далее в материалах настоящей заявки, такая ситуация будет указана ссылкой, как "ситуация движения транспорта"), и устанавливает значение флага ситуации движения транспорта на 1. Когда ЭБУ 10 содействия при вождении определяет, что общее количество объектов меньше порогового значения, ЭБУ 10 содействия при вождении определяет, что ситуация движения транспорта не имеет место, и устанавливает значение флага ситуации движения транспорта на 0. Далее в материалах настоящей заявки, будет более подробно описан способ определения ситуации движения транспорта.
Установка области одинакового направления и области противоположного направления
[0055] Как проиллюстрировано на фиг. 5, ЭБУ 10 содействия при вождении устанавливает четыре области, а именно, левостороннюю область Rsl одинакового направления, правостороннюю область Rsr одинакового направления, левостороннюю область Rol противоположного направления и правостороннюю область Ror противоположного направления, вокруг базового транспортного средства 100 посредством Общих формул с (8) по (11). Далее в материалах настоящей заявки, эти области будут, соответственно, указаны ссылкой, как "область Rsl", "область Rsr", "область Rol", и "область Ror".
Левосторонняя область Rsl(n) одинакового направления: -6 ≤ x(n) ≤ 7 и 1 ≤ y(n) ≤ 7... (8)
Правосторонняя область Rsr(n) одинакового направления: -6 ≤ x(n) ≤ 7 и -7 ≤ y(n) ≤ -1... (9)
Левосторонняя область Rol(n) противоположного направления: -6 ≤ x(n) ≤ 25 и 1 ≤ y(n) ≤ 7... (10)
Правосторонняя область Ror(n) противоположного направления: -6 ≤ x(n) ≤ 25 и -7 ≤ y(n) ≤ -1... (11)
[0056] То есть, левосторонняя область Rsl(n) одинакового направления является прямоугольной областью, которая имеет длинный край, имеющий длину 13 м в направлении TDv(n) движения базового транспортного средства 100 (то есть, в направлении оси x), и короткий край, имеющий длину 6 м в направлении, перпендикулярном направлению TDv(n) движения (то есть, в направлении оси y). Длинный край, из двух длинных краев области Rsl(n), с правой стороны (со стороны базового транспортного средства 100) удален на 1 м от начала координат O(n) базового транспортного средства 100. Когда диапазон x ≥ 0 в координатной плоскости xy определен, как "перед базовым транспортным средством 100", длина части длинного края области Rsl(n), расположенной перед базовым транспортным средством 100, составляет 7 м и равна длине левостороннего ожидаемого пути (ссылка на жирную линию на фиг. 5). Правосторонняя область Rsr(n) одинакового направления связана отношением осевой симметрии с левосторонней областью Rsl(n) одинакового направления относительно оси x. Таким образом, длина части длинного края области Rsr(n), расположенной перед базовым транспортным средством 100, также составляет 7 м и равна длине правостороннего ожидаемого пути (ссылка на жирную линию на фиг. 5). Далее в материалах настоящей заявки, левосторонняя область Rsl(n) одинакового направления и правосторонняя область Rsr(n) одинакового направления будут вместе указаны ссылкой, как "область Rs(n) одинакового направления".
[0057] Левосторонняя область Rol(n) противоположного направления является прямоугольной областью, которая имеет длинный край, имеющий длину 31 м в направлении TDv(n) движения базового транспортного средства 100, и короткий край, имеющий длину 6 м в направлении, перпендикулярном направлению TDv(n) движения. Длинный край, из двух длинных краев области Rol(n), с правой стороны удален на 1 м от начала координат O(n) базового транспортного средства 100. Длина части длинного края области Rol(n), расположенной перед базовым транспортным средством 100, составляет 25 м и является более длинной, чем длина левостороннего ожидаемого пути. Правосторонняя область Ror(n) противоположного направления связана отношением осевой симметрии с левосторонней областью Rol(n) противоположного направления относительно оси x. Таким образом, длина части длинного края области Ror(n), расположенной перед базовым транспортным средством 100, также составляет 25 м и является более длинной, чем длина правостороннего ожидаемого пути.
[0058] Диапазон достижения электромагнитной волны, передаваемой каждым датчиком 14 радара, шире, чем каждая из областей Rsl(n), Rsr(n), Rol(n), Ror(n). Далее в материалах настоящей заявки, левосторонняя область Rol(n) противоположного направления и правосторонняя область Ror(n) противоположного направления будут вместе указаны ссылкой, как "область Ro(n) противоположного направления". Формула области, представляющей каждую из области Rsl(n), области Rsr(n), области Rol(n) и области Ror(n) (другими словами, координаты каждой угловой части каждой области), может быть установлена надлежащим образом. Как область Rsl(n), так и область Rol(n) должны быть установлены с левой стороны от базового транспортного средства 100. Как область Rsr(n), так и область Ror(n) должны быть установлены с правой стороны от базового транспортного средства 100. Как область Rsl(n), так и область Rsr(n) должны содержать область в противоположном направлении от направления TDv(n) движения относительно начала координат O(n). Как область Rol(n), так и область Ror(n) должны содержать область в одинаковом направлении с направлением TDv(n) движения относительно начала координат O(n).
Расчет углового сдвига θ
[0059] ЭБУ 10 содействия при вождении рассчитывает угловой сдвиг θ(n) (0° ≤ θ(n) ≤ 180°) между направлением TDv(n) движения базового транспортного средства 100 и направлением TDo(n) движения объекта. Угловой сдвиг θ(n) является величиной угла между направлением TDv(n) движения и направлением TDo(n) движения объекта. Как проиллюстрировано на фиг. 6, ЭБУ 10 содействия при вождении рассчитывает угловой сдвиг θ(n) на основании единичного вектора e(n) вектора a(n) скорости базового транспортного средства 100 и вектора b(n) скорости объекта 200, как одного из примеров объекта. В частности, соотношение в Общей формуле (12) установлено между единичным вектором e(n) и вектором b(n) скорости объекта.
e(n)·b(n) = abs(e(n)) × abs(b(n)) × cos θ(n)... (12)
Величина единичного вектора e(n) равняется единице. Таким образом, когда Общую формулу (12) изменяют посредством замены abs(e(n))=1, получают Общую формулу (13). ЭБУ 10 содействия при вождении рассчитывает угловой сдвиг θ(n) с использованием Общей формулы (13).
cosθ(n) = e(n)·b(n)/{abs(b(n))}... (13)
То есть, ЭБУ 10 содействия при вождении рассчитывает угловой сдвиг θ(n) с использованием скалярного произведения единичного вектора e(n) вектора a(n) скорости транспортного средства и вектора b(n) скорости объекта. ЭБУ 10 содействия при вождении сохраняет угловой сдвиг θ(n) в ОЗУ ЭБУ 10 содействия при вождении. Числитель e(n)·b(n) в правой части Общей формулы (13) равен компоненту x вектора b(n) скорости объекта.
[0060] В примере по фиг. 7, объекты с A по G перемещаются в направлении, проиллюстрированном стрелками. Объекты A, C, с E по G движутся параллельно оси x, а объекты B, D движутся параллельно оси y. ЭБУ 10 содействия при вождении рассчитывает угловые сдвиги с θa(n) по θg(n) между направлением TDv(n) движения базового транспортного средства 100 и каждым из направлений с TDoa(n) по TDog(n) движения объектов с A по G с использованием Общей формулы (13). Например, для объекта A, вектор ba(n) скорости объекта A составляет ba(n)=(SPDoa(n),0). Таким образом, когда вектор ba(n) скорости объекта подставляют в общую формулу (13), результат составляет cosθa(n) =1, и получают угловой сдвиг θa(n)=0°. Когда тот же процесс выполняется для объектов с B по G, получают θb(n)=θd(n)=90°, θc(n)=0°, и θe(n)=θf(n)=θg(n)=180°.
Классификация объектов на основании углового сдвига θ
[0061] На основании углового сдвига θ(n), ЭБУ 10 содействия при вождении определяет, рассматривается ли направление TDo(n) движения объекта, как приблизительно одинаковое направление с направлением TDv(n) движения базового транспортного средства 100 для удобства, или оно рассматривается, как приблизительно противоположное направление относительно направления TDv(n) движения базового транспортного средства 100 для удобства. Такой процесс является предварительным процессом для последующего процесса, и является процессом предварительной классификации объекта по одному из двух направлений (приблизительно одинаковое направление и приблизительно противоположное направление) для удобства, на основании направления TDo(n) движения объекта. В частности, ЭБУ 10 содействия при вождении определяет, является ли угловой сдвиг θ(n) меньше или равным первому угловому пороговому значению (90° в настоящем примере). Когда ЭБУ 10 содействия при вождении определяет, что угловой сдвиг θ(n) меньше или равен первому угловому пороговому значению (то есть, когда ЭБУ 10 содействия при вождении определяет, что 0° ≤ θ(n) ≤ 90° удовлетворено), ЭБУ 10 содействия при вождении определяет, что направление TDo(n) движения объекта рассматривается, как приблизительно одинаковое направление с направлением TDv(n) движения базового транспортного средства 100, для удобства (предварительно), и классифицирует объект, как объект одинакового направления, который движется приблизительно в одинаковом направлении с базовым транспортным средством 100. Когда ЭБУ 10 содействия при вождении определяет, что угловой сдвиг θ больше или равен первому угловому пороговому значению (то есть, когда ЭБУ 10 содействия при вождении определяет, что 90 ° ≤ θ(n) ≤ 180° удовлетворено), ЭБУ 10 содействия при вождении определяет, что направление TDo(n) движения объекта рассматривается, как приблизительно противоположное направление относительно направления TDv(n) движения базового транспортного средства 100, для удобства (предварительно), и классифицирует объект, как объект противоположного направления, который движется приблизительно в противоположном направлении относительно базового транспортного средства 100. ЭБУ 10 содействия при вождении сохраняет результат классификации в ОЗУ ЭБУ 10 содействия при вождении. Первое угловое пороговое значение не ограничено 90° и может быть установлено на любое значение, которое рассматривается, как приблизительно равное 90° (например, угол от 85° до 95°).
[0062] В примере по фиг. 7, угловые сдвиги с θa(n) по θd(n) объектов с A по D больше или равны 0° и меньше или равны 90°. Таким образом, ЭБУ 10 содействия при вождении определяет, что направления с TDoa(n) по TDod(n) движения объектов с A по D рассматриваются, как приблизительно одинаковые направления с направлением TDv(n) движения базового транспортного средства 100, и классифицирует объекты с A по D, как объекты одинакового направления. Угловые сдвиги с θe(n) по θg(n) объектов с E по G больше 90° и меньше или равны 180°. Таким образом, ЭБУ 10 содействия при вождении определяет, что направления с TDoe(n) по TDog(n) движения объектов с E по G рассматриваются, как приблизительно противоположное направление относительно направления TDv(n) движения базового транспортного средства 100, и классифицирует объекты с E по G, как объекты противоположного направления.
Условие области одинакового направления и условие области противоположного направления
[0063] Когда ЭБУ 10 содействия при вождении классифицирует объект, как объект одинакового направления, ЭБУ 10 содействия при вождении определяет, установлено ли "условие области одинакового направления, состоящее в том, что координаты относительного положения P(n) объекта одинакового направления расположены в пределах любой области из левосторонней области Rsl(n) одинакового направления, определенной Общей формулой (8), и правосторонней области Rsr(n) одинакового направления, определенной Общей формулой (9)". Когда ЭБУ 10 содействия при вождении классифицирует объект, как объект противоположного направления, ЭБУ 10 содействия при вождении определяет, установлено ли "условие области противоположного направления, состоящее в том, что координаты относительного положения P(n) объекта противоположного направления расположены в пределах любой области из левосторонней области Rol(n) противоположного направления, определенной Общей формулой (10), и правосторонней области Ror(n) противоположного направления, определенной Общей формулой (11)".
[0064] Когда ЭБУ 10 содействия при вождении определяет, что условие одинакового направления установлено, ЭБУ 10 содействия при вождении определяет, что объект одинакового направления присутствует в области Rs(n) одинакового направления, и извлекает объект одинакового направления в качестве объекта одинакового направления в области. Когда ЭБУ 10 содействия при вождении определяет, что условие одинакового направления не установлено, ЭБУ 10 содействия при вождении определяет, что объект одинакового направления не присутствует в области Rs(n) одинакового направления, и не извлекает объект одинакового направления.
[0065] Когда ЭБУ 10 содействия при вождении определяет, что условие противоположного направления установлено, ЭБУ 10 содействия при вождении определяет, что объект противоположного направления присутствует в области Ro(n) противоположного направления, и извлекает объект противоположного направления в качестве объекта противоположного направления в области. Когда ЭБУ 10 содействия при вождении определяет, что условие противоположного направления не установлено, ЭБУ 10 содействия при вождении определяет, что объект противоположного направления не присутствует в области Ro(n) противоположного направления, и не извлекает объект противоположного направления. ЭБУ 10 содействия при вождении сохраняет результат извлечения в ОЗУ ЭБУ 10 содействия при вождении.
[0066] В примере по фиг. 7, объекты с A по D классифицированы, как объекты одинакового направления, координаты относительного положения Pa(n) объекта A находятся в пределах правосторонней области Rsr(n) одинакового направления, определенной Общей формулой (9), а координаты относительного положения Pb(n) объекта B и координаты относительного положения Pc(n) объекта C находятся в пределах левосторонней области Rsl(n) одинакового направления, определенной Общей формулой (8). Соответственно, ЭБУ 10 содействия при вождении определяет, что условие области одинакового направления установлено для объектов с A по C, и извлекает объекты с A по C в качестве объектов одинакового направления в области. Координаты относительного положения Pd(n) объекта D не находятся в пределах ни одной из правосторонней области Rsr(n) одинакового направления и левосторонней области Rsl(n) одинакового направления. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие области одинакового направления не установлено для объекта D, и не извлекает объект D.
[0067] Для объектов с E по G, классифицированных, как объекты противоположного направления, координаты относительного положения Pe(n) объекта E и координаты относительного положения Pf(n) объекта F находятся в пределах правосторонней области Ror(n) противоположного направления, определенной Общей формулой (11). Соответственно, ЭБУ 10 содействия при вождении определяет, что условие области противоположного направления установлено для объекта E и объекта F, и извлекает объект E и объект F в качестве объектов противоположного направления в области. Координаты относительного положения Pg(n) объекта G не находятся в пределах ни одной из левосторонней области Rol(n) противоположного направления, определенной Общей формулой (10) и правосторонней области Ror(n) противоположного направления, определенной Общей формулой (11). Соответственно, ЭБУ 10 содействия при вождении определяет, что условие области противоположного направления не установлено для объекта G, и не извлекает объект G.
Условие скорости одинакового направления и условие скорости противоположного направления
[0068] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве левостороннего объекта одинакового направления, ЭБУ 10 содействия при вождении определяет, установлено ли условие скорости одинакового направления. Условие скорости одинакового направления состоит в том, что скорость SPDo(n) объекта одинакового направления в области находится в пределах диапазона скорости одинакового направления (больше или равна 5,56 м/с и меньше или равна 27,78 м/с в настоящем примере). Когда ЭБУ 10 содействия при вождении извлекает объект в качестве левостороннего объекта противоположного направления, ЭБУ 10 содействия при вождении определяет, установлено ли условие скорости противоположного направления. Условие скорости противоположного направления состоит в том, что скорость SPDo(n) объекта противоположного направления в области находится в пределах диапазона скорости противоположного направления (больше или равна 2,8 м/с и меньше или равна 27,78 м/с в настоящем примере).
[0069] Когда ЭБУ 10 содействия при вождении определяет, что условие скорости одинакового направления установлено, ЭБУ 10 содействия при вождении определяет, что объект одинакового направления в области движется в пределах диапазона скорости одинакового направления, и извлекает объект одинакового направления в области в качестве "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления". Когда ЭБУ 10 содействия при вождении определяет, что условие скорости одинакового направления не установлено, ЭБУ 10 содействия при вождении определяет, что объект одинакового направления в области движется за пределами диапазона скорости одинакового направления, и не извлекает объект одинакового направления в области.
[0070] Когда ЭБУ 10 содействия при вождении определяет, что условие скорости противоположного направления установлено, ЭБУ 10 содействия при вождении определяет, что объект противоположного направления в области движется в пределах диапазона скорости противоположного направления, и извлекает объект противоположного направления в области в качестве "объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления". Когда ЭБУ 10 содействия при вождении определяет, что условие скорости противоположного направления не установлено, ЭБУ 10 содействия при вождении определяет, что объект противоположного направления в области движется за пределами диапазона скорости противоположного направления, и не извлекает объект противоположного направления в области. ЭБУ 10 содействия при вождении сохраняет результат извлечения в ОЗУ ЭБУ 10 содействия при вождении.
[0071] В примере по фиг. 7, скорости SPDo(n) объекта A, объекта B, объекта C, объекта E и объекта F предполагаются равными, соответственно SPDoa(n)=6 м/с, SPDob(n)=8 м/с, SPDoc(n)=1 м/с, SPDoe(n)=15 м/с, и SPDof(n)=12 м/с. В таком случае, для объектов с A по C, извлеченных в качестве объектов одинакового направления в области, скорость SPDoa(n) объекта A (6 м/с) и скорость SPDob(n) объекта B (8 м/с) находятся в пределах диапазона скорости одинакового направления. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие скорости одинакового направления установлено для объекта A и объекта B, и извлекает объект A и объект B в качестве "объектов одинакового направления в области, удовлетворяющих условию скорости одинакового направления". Скорость SPDoc(n) объекта C (1 м/с) находится за пределами диапазона скорости одинакового направления. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие скорости одинакового направления не установлено для объекта C, и не извлекает объект C.
[0072] Для объекта E и объекта F, извлеченных в качестве объектов противоположного направления в области, скорость SPDoe(n) объекта E (15 м/с) и скорость SPDof(n) объекта F (12 м/с) находятся в пределах диапазона скорости противоположного направления. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие скорости противоположного направления установлено для объекта E и объекта F, и извлекает объект E и объект F в качестве "объектов противоположного направления в области, удовлетворяющих условию скорости противоположного направления".
Условие угла одинакового направления и условие угла противоположного направления
[0073] Ситуация движения транспорта, которая препятствует движению целевого объекта (то есть, объекта, имеющего вероятность пересечения ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), рассматривается, как вызванная объектом, проезжающим перед целевым объектом, то есть, объектом, имеющим направление TDo(n) движения, приблизительно параллельное направлению TDv(n) движения базового транспортного средства 100. Как очевидно из описания Классификации объектов, объект классифицируется, как любой из объекта одинакового направления и объекта противоположного направления на основании того, является ли угловой сдвиг θ(n) меньше или равным первому угловому пороговому значению (90 в настоящем примере). Соответственно, "объекты одинакового направления в области, удовлетворяющие условию скорости одинакового направления", включают в себя объект, имеющий направление TDo(n) движения, не являющееся приблизительно параллельным направлению TDv(n) движения базового транспортного средства 100. Схожим образом, "объекты противоположного направления в области, удовлетворяющие условию скорости противоположного направления", включают в себя объект, имеющий направление TDo(n) движения, не являющееся приблизительно параллельным направлению TDv(n) движения базового транспортного средства 100. Соответственно, когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления", и когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления", ЭБУ 10 содействия при вождении определяет, является ли направление TDo(n) движения объекта приблизительно параллельным направлению TDv(n) движения базового транспортного средства 100, на основании углового сдвига θ(n).
[0074] В частности, когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления", ЭБУ 10 содействия при вождении определяет, установлено ли условие угла одинакового направления. Условие угла одинакового направления состоит в том, что угловой сдвиг θ(n) меньше или равен второму угловому пороговому значению (20° в настоящем примере). Когда ЭБУ 10 содействия при вождении определяет, что условие угла одинакового направления установлено (то есть, когда 0° ≤ θ(n) ≤ 20° удовлетворено), ЭБУ 10 содействия при вождении определяет, что направление TDo(n) движения объекта приблизительно параллельно направлению TDv(n) движения базового транспортного средства 100, и извлекает объект в качестве "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления и условию угла одинакового направления". Когда ЭБУ 10 содействия при вождении определяет, что условие угла одинакового направления не установлено (то есть, когда 20° ≤ θ(n) ≤ 90° удовлетворено), ЭБУ 10 содействия при вождении определяет, что направление TDo(n) движения объекта не является приблизительно параллельным направлению TDv(n) движения базового транспортного средства 100, и не извлекает объект. ЭБУ 10 содействия при вождении сохраняет результат извлечения в ОЗУ ЭБУ 10 содействия при вождении. Далее в материалах настоящей заявки, "объект одинакового направления в области, удовлетворяющий условию скорости одинакового направления и условию угла одинакового направления" будет просто указан ссылкой, как "объект одинакового направления в области, удовлетворяющий условиям". Второе пороговое значение не ограничено 20 и может быть установлено на любое значение, меньшее, чем первое пороговое значение (например, предопределенное значение в пределах диапазона больше 0° и меньше или равно 45°). Так как второе угловое пороговое значение меньше, извлекается объект, имеющий более высокую степень параллельности между направлением TDo(n) движения и направлением TDv(n) движения базового транспортного средства 100.
[0075] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления", ЭБУ 10 содействия при вождении определяет, установлено ли условие угла противоположного направления. Условие угла противоположного направления состоит в том, что угловой сдвиг θ(n) больше или равен третьему угловому пороговому значению (160° в настоящем примере). Когда ЭБУ 10 содействия при вождении определяет, что условие угла противоположного направления установлено (то есть, когда 160° ≤ θ(n) ≤ 180° удовлетворено), ЭБУ 10 содействия при вождении определяет, что направление TDo(n) движения объекта приблизительно параллельно направлению TDv(n) движения базового транспортного средства 100, и извлекает объект в качестве "объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления и условию угла противоположного направления". Когда ЭБУ 10 содействия при вождении определяет, что условие угла противоположного направления не установлено (то есть, когда 90° < θ(n) < 160° удовлетворено), ЭБУ 10 содействия при вождении определяет, что направление TDo(n) движения объекта не является приблизительно параллельным направлению TDv(n) движения базового транспортного средства 100, и не извлекает объект. ЭБУ 10 содействия при вождении сохраняет результат извлечения в ОЗУ ЭБУ 10 содействия при вождении. Далее в материалах настоящей заявки, "объект противоположного направления в области, удовлетворяющий условию скорости противоположного направления и условию угла противоположного направления" будет просто указан ссылкой, как "объект противоположного направления в области, удовлетворяющий условиям". "Объект одинакового направления в области, удовлетворяющий условиям" и "объект противоположного направления в области, удовлетворяющий условиям" могут быть вместе указаны ссылкой, как "объект в области, удовлетворяющий условиям". Третье пороговое значение не ограничено 160 и может быть установлено на любое значение, большее, чем первое пороговое значение (например, предопределенное значение в пределах диапазона больше или равно 135° и меньше 180°). Так как третье угловое пороговое значение больше, извлекается объект, имеющий более высокую степень параллельности между направлением TDo(n) движения и направлением TDv(n) движения базового транспортного средства 100.
[0076] В примере по фиг. 7, где объект A и объект B извлечены в качестве "объектов одинакового направления в области, удовлетворяющих условию скорости одинакового направления", угловой сдвиг θa(n) объекта (= 0°) меньше или равен второму угловому пороговому значению. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие угла одинакового направления установлено для объекта A, и извлекает объект A в качестве "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления и условию угла одинакового направления". Угловой сдвиг θb(n) объекта B (= 90°) выше, чем второе угловое пороговое значение. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие угла одинакового направления не установлено для объекта B, и не извлекает объект B.
[0077] Для объекта E и объекта F, извлеченных в качестве "объектов противоположного направления в области, удовлетворяющих условию скорости одинакового направления", угловой сдвиг θe(n) объекта E (= 180°) и угловой сдвиг θf(n) объекта F (= 180°) больше или равны третьему угловому пороговому значению. Соответственно, ЭБУ 10 содействия при вождении определяет, что условие угла противоположного направления установлено для объекта E и объекта F, и извлекает объект E и объект F в качестве "объектов противоположного направления в области, удовлетворяющих условию скорости противоположного направления и условию угла противоположного направления".
Классификация объектов на основании относительного положения P
[0078] Определение того, преграждается ли движение целевого объекта (объекта, имеющего вероятность пересечения ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), считается различающимся в соответствии с тем, присутствует ли "объект в области, удовлетворяющий условиям", с левой стороны или с правой стороны от базового транспортного средства 100. То есть, например, когда "объект в области, удовлетворяющий условиям", присутствует с правой стороны от базового транспортного средства 100, с целевым объектом, приближающимся с правой стороны от базового транспортного средства 100, "объект в области, удовлетворяющий условиям" находится ближе к целевому объекту, чем базовое транспортное средство 100. Соответственно, целевой объект вряд ли может рассматриваться, как пересекающий ожидаемый путь базового транспортного средства 100, расположенного дальше, чем "объект в области, удовлетворяющий условиям", в пределах порогового периода времени. То есть, движение целевого объекта рассматривается, как преграждаемое "объектом в области, удовлетворяющим условиям". Когда "объект в области, удовлетворяющий условиям", присутствует с левой стороны от базового транспортного средства 100, с целевым объектом, приближающимся с правой стороны от базового транспортного средства 100, "объект в области, удовлетворяющий условиям" находится дальше от целевого объекта, чем базовое транспортное средство 100. Соответственно, целевой объект имеет вероятность пересечения ожидаемого пути базового транспортного средства 100, расположенного ближе, чем "объект в области, удовлетворяющий условиям", в пределах порогового периода времени. То есть, вероятность того, что движению целевого объекта будет препятствовать "объект в области, удовлетворяющий условиям", считается очень низкой. То же самое применимо, когда целевой объект приближается с левой стороны от базового транспортного средства 100. Соответственно, когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта в области, удовлетворяющего условиям", ЭБУ 10 содействия при вождении определяет, присутствует ли объект с левой стороны или с правой стороны от базового транспортного средства, и определяет, может ли объект являться причиной препятствия движению целевого объекта.
[0079] В частности, когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления и условию угла одинакового направления", ЭБУ 10 содействия при вождении определяет, находятся ли координаты относительного положения P(n) в пределах левосторонней области Rsl(n) одинакового направления, определенной Общей формулой (8). Когда ЭБУ 10 содействия при вождении определяет, что координаты относительного положения P(n) находятся в пределах левосторонней области Rsl(n) одинакового направления, ЭБУ 10 содействия при вождении определяет, что объект присутствует с левой стороны от базового транспортного средства 100, и классифицирует объект, как "левосторонний объект одинакового направления в области, удовлетворяющий условию скорости одинакового направления и условию угла одинакового направления" (левосторонний объект одинакового направления). Когда ЭБУ 10 содействия при вождении определяет, что координаты относительного положения P(n) "объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления и условию угла одинакового направления" не находятся в пределах левосторонней области Rsl(n) одинакового направления, ЭБУ 10 содействия при вождении определяет, что координаты находятся в пределах правосторонней области Rsr(n) одинакового направления, определенной Общей формулой (9) (то есть, объект присутствует с правой стороны от базового транспортного средства 100), и классифицирует объект, как "правосторонний объект одинакового направления в области, удовлетворяющий условию скорости одинакового направления и условию угла одинакового направления" (правосторонний объект одинакового направления). ЭБУ 10 содействия при вождении сохраняет результат классификации в ОЗУ ЭБУ 10 содействия при вождении. Далее в материалах настоящей заявки, "левосторонний объект одинакового направления в области, удовлетворяющий условию скорости одинакового направления и условию угла одинакового направления" может быть просто указан ссылкой, как "левосторонний объект одинакового направления в области, удовлетворяющий условиям". "Правосторонний объект одинакового направления в области, удовлетворяющий условию скорости одинакового направления и условию угла одинакового направления" может быть просто указан ссылкой, как "правосторонний объект одинакового направления в области, удовлетворяющий условиям".
[0080] Когда ЭБУ 10 содействия при вождении извлекает объект в качестве "объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления и условию угла противоположного направления", ЭБУ 10 содействия при вождении определяет, находятся ли координаты относительного положения P(n) в пределах левосторонней области Rol(n) противоположного направления, определенной Общей формулой (10). Когда ЭБУ 10 содействия при вождении определяет, что координаты относительного положения P(n) находятся в пределах левосторонней области Rol(n) противоположного направления, ЭБУ 10 содействия при вождении определяет, что объект присутствует с левой стороны от базового транспортного средства 100, и классифицирует объект, как "левосторонний объект противоположного направления в области, удовлетворяющий условию скорости противоположного направления и условию угла противоположного направления" (левосторонний объект противоположного направления). Когда ЭБУ 10 содействия при вождении определяет, что координаты относительного положения P(n) "объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления и условию угла противоположного направления" не находятся в пределах левосторонней области Rol(n) противоположного направления, ЭБУ 10 содействия при вождении определяет, что координаты находятся в пределах правосторонней области Ror(n) противоположного направления, определенной Общей формулой (11) (то есть, объект присутствует с правой стороны от базового транспортного средства 100), и классифицирует объект, как "правосторонний объект противоположного направления в области, удовлетворяющий условию скорости противоположного направления и условию угла противоположного направления" (правосторонний объект противоположного направления). ЭБУ 10 содействия при вождении сохраняет результат классификации в ОЗУ ЭБУ 10 содействия при вождении. Далее в материалах настоящей заявки, "левосторонний объект противоположного направления в области, удовлетворяющий условию скорости противоположного направления и условию угла противоположного направления" может быть просто указан ссылкой, как "левосторонний объект противоположного направления в области, удовлетворяющий условиям". "Правосторонний объект противоположного направления в области, удовлетворяющий условию скорости противоположного направления и условию угла противоположного направления" может быть просто указан ссылкой, как "правосторонний объект противоположного направления в области, удовлетворяющий условиям".
[0081] В примере по фиг. 7, координаты относительного положения Pa(n) объекта A, извлеченного в качестве "объекта одинакового направления в области, удовлетворяющего условиям", не находятся в пределах левосторонней области Rsl(n) одинакового направления, определенной Общей формулой (8). Таким образом, ЭБУ 10 содействия при вождении определяет, что объект A присутствует в правосторонней области Rsr(n) одинакового направления, и классифицирует объект A в качестве "правостороннего объекта одинакового направления в области, удовлетворяющего условиям". Координаты относительного положения Pe(n) и относительного положения Pf(n) объекта E и объекта F, извлеченных в качестве "объектов противоположного направления в области, удовлетворяющих условиям", не находятся в пределах левосторонней области Rol(n) противоположного направления, определенной Общей формулой (10). Соответственно, ЭБУ 10 содействия при вождении определяет, что объект E и объект F присутствуют в правосторонней области Ror(n) противоположного направления, и классифицирует объект E и объект F в качестве "правосторонних объектов одинакового направления в области, удовлетворяющих условиям".
Подсчет количества объектов
[0082] ЭБУ 10 содействия при вождении подсчитывает количество "объектов в области, удовлетворяющих условиям", присутствующих с левой стороны от базового транспортного средства 100, и количество "объектов в области, удовлетворяющих условиям", присутствующих с правой стороны от базового транспортного средства 100.
[0083] В частности, ЭБУ 10 содействия при вождении подсчитывает количество "левосторонних объектов одинакового направления в области, удовлетворяющих условиям" посредством левостороннего счетчика ksl одинакового направления, и подсчитывает количество "левосторонних объектов противоположного направления в области, удовлетворяющих условиям" посредством левостороннего счетчика kol противоположного направления. ЭБУ 10 содействия при вождении рассчитывает сумму обоих подсчитанных количеств (= ksl+kol) в качестве количества "объектов в области, удовлетворяющих условиям", присутствующих с левой стороны от базового транспортного средства 100 (далее в материалах настоящей заявки, это количество будет указано ссылкой, как "количество левосторонних объектов"). Далее в материалах настоящей заявки, "объект в области, удовлетворяющий условиям, присутствующий с левой стороны от базового транспортного средства 100", будет указан ссылкой, как "левосторонний объект в области, удовлетворяющий условиям".
[0084] В частности, ЭБУ 10 содействия при вождении подсчитывает количество "правосторонних объектов одинакового направления в области, удовлетворяющих условиям" посредством правостороннего счетчика ksr одинакового направления, и подсчитывает количество "правосторонних объектов противоположного направления в области, удовлетворяющих условиям" посредством правостороннего счетчика kor противоположного направления. ЭБУ 10 содействия при вождении подсчитывает сумму обоих подсчитанных количеств (= ksr+kor) в качестве количества "объектов в области, удовлетворяющих условиям", присутствующих с правой стороны от базового транспортного средства 100 (далее в материалах настоящей заявки, это количество будет указано ссылкой, как "количество правосторонних объектов"). Далее в материалах настоящей заявки, "объект в области, удовлетворяющий условиям, присутствующий с правой стороны от базового транспортного средства 100", будет указан ссылкой, как "правосторонний объект в области, удовлетворяющий условиям". ЭБУ 10 содействия при вождении сохраняет количество левосторонних объектов и количество правосторонних объектов в ОЗУ ЭБУ 10 содействия при вождении.
[0085] В примере по фиг. 7, как описано выше, объект, который классифицирован в качестве "левостороннего объекта одинакового направления в области, удовлетворяющего условиям", не присутствует на n-ом цикле и, таким образом, количество таких объектов равно нулю. Схожим образом, объект, который классифицирован в качестве "левостороннего объекта противоположного направления в области, удовлетворяющего условиям", не присутствует на n-ом цикле и, таким образом, количество таких объектов равно нулю. Соответственно, количество "левосторонних объектов одинакового направления, удовлетворяющих условиям" (количество левосторонних объектов), подсчитанное ЭБУ 10 содействия при вождении, равно "0", что является суммой обоих подсчитанных количеств. Объект A классифицирован в качестве "правостороннего объекта одинакового направления в области, удовлетворяющего условиям" на n-ом цикле и, таким образом, количество таких объектов равно одному. Объект E и объект F классифицированы в качестве "правосторонних объектов противоположного направления в области, удовлетворяющих условиям" на n-ом цикле и, таким образом, количество таких объектов равно двум. Соответственно, количество "правосторонних объектов в области, удовлетворяющих условиям" (количество правосторонних объектов), подсчитанное ЭБУ 10 содействия при вождении, равно "3", что является суммой обоих подсчитанных количеств.
Расчет общего количества левосторонних объектов и общего количества правосторонних объектов
[0086] ЭБУ 10 содействия при вождении рассчитывает сумму количества левосторонних объектов в предопределенном периоде (далее в материалах настоящей заявки, указываемое ссылкой, как "общее количество левосторонних объектов") и сумму количества правосторонних объектов в предопределенном периоде (далее в материалах настоящей заявки, указываемое ссылкой, как "общее количество правосторонних объектов"). Когда предопределенный период определен в качестве периода, соответствующего M (M является положительным целым числом) циклам (то есть, M × Tcal [c]), ЭБУ 10 содействия при вождении рассчитывает сумму последних полученных M количеств левосторонних объектов, включающую количество левосторонних объектов, полученное в самом последнем цикле, в качестве общего количества левосторонних объектов. ЭБУ 10 содействия при вождении рассчитывает сумму последних полученных M количеств правосторонних объектов, включающую количество правосторонних объектов, полученное в самом последнем цикле, в качестве общего количества правосторонних объектов. До истечения предопределенного периода с момента переключения переключателя двигателя в состояние ВКЛ, ЭБУ 10 содействия при вождении рассчитывает сумму количества левосторонних объектов, полученное перед текущим циклом с момента переключения переключателя двигателя в состояние ВКЛ, в качестве общего количества левосторонних объектов, и рассчитывает сумму количества правосторонних объектов, полученное перед текущим циклом с момента переключения переключателя двигателя в состояние ВКЛ, в качестве общего количества правосторонних объектов.
[0087] В примере по фиг. 7, когда предполагается, что M=5, предопределенный период является периодом, соответствующим пяти циклам от (n-4)-ого цикла до n-ого цикла. Предполагается, что объект A классифицирован, как "правосторонний объект одинакового направления в области, удовлетворяющий условиям" с (n-1)-ого цикла по n-ый цикл. Предполагается, что объект E классифицирован, как "правосторонний объект противоположного направления в области, удовлетворяющий условиям" с (n-4)-ого цикла по n-ый цикл. Предполагается, что объект F классифицирован, как "правосторонний объект противоположного направления в области, удовлетворяющий условиям" с (n-2)-ого цикла по n-ый цикл. Во время предопределенного периода, никакие объекты, кроме объектов A, B, E, не предполагаются классифицированными в качестве "правосторонних объектов в области, удовлетворяющих условиям" и "левосторонних объектов в области, удовлетворяющих условиям".
[0088] Согласно предположению, любое из количества "левосторонних объектов одинакового направления в области, удовлетворяющих условиям" и количества "левосторонних объектов противоположного направления в области, удовлетворяющих условиям" равно нулю, нулю, нулю, нулю и нулю в порядке от (n-4)-ого цикла до n-ого цикла. Соответственно, количество левосторонних объектов равно нулю, нулю, нулю, нулю и нулю в порядке. Следовательно, ЭБУ 10 содействия при вождении рассчитывает сумму количеств левосторонних объектов (то есть, ноль) в качестве общего количества левосторонних объектов. Согласно предположению, количество "правосторонних объектов одинакового направления в области, удовлетворяющих условиям", равно нулю, нулю, нулю, одному и одному в порядке от (n-4)-ого цикла до n-ого цикла. Количество "правосторонних объектов противоположного направления в области, удовлетворяющих условиям", равно одному, одному, двум, двум и двум в порядке от (n-4)-ого цикла до n-ого цикла. Соответственно, количество правосторонних объектов равно одному, одному, двум, трем и трем в порядке. Следовательно, ЭБУ 10 содействия при вождении рассчитывает сумму количеств правосторонних объектов (то есть, 10) в качестве общего количества правосторонних объектов.
Определение того, имеет ли место левосторонняя/правосторонняя ситуация движения транспорта, и установка флага левосторонней/правосторонней ситуации движения транспорта
[0089] ЭБУ 10 содействия при вождении определяет, является ли общее количество левосторонних объектов больше или равным предопределенному левостороннему пороговому значению. Когда ЭБУ 10 содействия при вождении определяет, что общее количество левосторонних объектов больше или равно предопределенному левостороннему пороговому значению, ЭБУ 10 содействия при вождении определяет, что имеет место "ситуация, в которой "левосторонний объект в области, удовлетворяющий условиям" препятствует движению целевого объекта, приближающегося с левой стороны от базового транспортного средства 100 (далее в материалах настоящей заявки, такая ситуация будет указана ссылкой, как "левосторонняя ситуация движения транспорта")", и устанавливает значение флага левосторонней ситуации движения транспорта на 1. Когда ЭБУ 10 содействия при вождении определяет, что общее количество левосторонних объектов меньше левостороннего порогового значения, ЭБУ 10 содействия при вождении определяет, что левосторонняя ситуация движения транспорта не имеет место, и устанавливает значение флага левосторонней ситуации движения транспорта на 0.
[0090] ЭБУ 10 содействия при вождении определяет, является ли общее количество правосторонних объектов больше или равным предопределенному правостороннему пороговому значению. Когда ЭБУ 10 содействия при вождении определяет, что общее количество правосторонних объектов больше или равно предопределенному правостороннему пороговому значению, ЭБУ 10 содействия при вождении определяет, что имеет место "ситуация, в которой "правосторонний объект в области, удовлетворяющий условиям" препятствует движению целевого объекта, приближающегося с правой стороны от базового транспортного средства 100 (далее в материалах настоящей заявки, такая ситуация будет указана ссылкой, как "правосторонняя ситуация движения транспорта")", и устанавливает значение флага правосторонней ситуации движения транспорта на 1. Когда ЭБУ 10 содействия при вождении определяет, что общее количество правосторонних объектов меньше правостороннего порогового значения, ЭБУ 10 содействия при вождении определяет, что правосторонняя ситуация движения транспорта не имеет место, и устанавливает значение флага правосторонней ситуации движения транспорта на 0. ЭБУ 10 содействия при вождении сохраняет установленное значение каждого из флага левосторонней ситуации движения транспорта и флага правосторонней ситуации движения транспорта в ОЗУ ЭБУ 10 содействия при вождении.
[0091] В примере по фиг. 7, каждое из левостороннего порогового значения и правостороннего порогового значения предполагается равным пяти. Согласно предположению, так как общее количество левосторонних объектов равно нулю, ЭБУ 10 содействия при вождении определяет, что общее количество левосторонних объектов меньше левостороннего порогового значения, и устанавливает значение флага левосторонней ситуации движения транспорта на 0. Так как общее количество правосторонних объектов равно 10, ЭБУ 10 содействия при вождении определяет, что общее количество правосторонних объектов больше или равно правостороннему пороговому значению, и устанавливает значение флага правосторонней ситуации движения транспорта на 1.
D. Работа, связанная с определением привлечения внимания
[0092] Далее будет описана работа, связанная с определением привлечения внимания. Когда двигатель находится в состоянии ВКЛ, или каждый раз, когда истекает расчетный период времени Tcal, ЭБУ 10 содействия при вождении определяет, должно ли внимание быть привлечено, для каждого объекта на основании результата определения целевого объекта в B (то есть, значений флага левостороннего привлечения внимания и флага правостороннего привлечения внимания) и результата определения ситуации движения транспорта в C (то есть, значений флага левосторонней ситуации движения транспорта и флага правосторонней ситуации движения транспорта).
Когда привлекается внимание
[0093] В частности, когда ЭБУ 10 содействия при вождении определяет, что значение флага левостороннего привлечения внимания объекта равно 1 (то есть, значение флага правостороннего привлечения внимания объекта равно 0), и что значение флага левосторонней ситуации движения транспорта равно 0, ЭБУ 10 содействия при вождении определяет, что "присутствует объект, приближающийся с левой стороны базового транспортного средства 100, целевой объект движется без препятствия его движению, так как ситуация движения транспорта, препятствующая движению целевого объекта, не имеет место с левой стороны от базового транспортного средства 100, и, следовательно, целевой объект имеет вероятность пересечения левостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени", независимо от значения флага правосторонней ситуации движения транспорта. ЭБУ 10 содействия при вождении генерирует сигнал запроса и привлекает внимание к целевому объекту с использованием устройства 21 отображения. То есть, когда присутствует целевой объект, приближающийся с левой стороны от базового транспортного средства 100, и левосторонняя ситуация движения транспорта не имеет место, ЭБУ 10 содействия при вождении привлекает внимание, даже когда имеет место правосторонняя ситуация движения транспорта. Когда ЭБУ 10 содействия при вождении определяет, что значение флага правостороннего привлечения внимания объекта равно 1 (то есть, значение флага левостороннего привлечения внимания объекта равно 0), и что значение флага правосторонней ситуации движения транспорта равно 0, ЭБУ 10 содействия при вождении определяет, что "присутствует объект, приближающийся с правой стороны базового транспортного средства 100, целевой объект движется без препятствия его движению, так как ситуация движения транспорта, препятствующая движению целевого объекта, не имеет место с правой стороны от базового транспортного средства 100, и, следовательно, целевой объект имеет вероятность пересечения правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени", независимо от значения флага левосторонней ситуации движения транспорта. ЭБУ 10 содействия при вождении генерирует сигнал запроса и привлекает внимание к целевому объекту с использованием устройства 21 отображения. То есть, когда присутствует целевой объект, приближающийся с правой стороны от базового транспортного средства 100, и правосторонняя ситуация движения транспорта не имеет место, ЭБУ 10 содействия при вождении привлекает внимание, даже когда имеет место левосторонняя ситуация движения транспорта.
Когда привлечение внимания запрещено
[0094] Когда ЭБУ 10 содействия при вождении определяет, что значение флага левостороннего привлечения внимания объекта равно 1 и значение флага левосторонней ситуации движения транспорта равно 1, ЭБУ 10 содействия при вождении определяет, что "несмотря на то, что присутствует целевой объект, приближающийся с левой стороны базового транспортного средства 100, движению целевого объекта создается препятствие из-за левосторонней ситуации движения транспорта, и, следовательно, целевой объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени", независимо от значения флага правосторонней ситуации движения транспорта. ЭБУ 10 содействия при вождении запрещает генерирование сигнала запроса и, следовательно, запрещает привлечение внимания к целевому объекту. То есть, когда присутствует целевой объект, приближающийся с левой стороны от базового транспортного средства 100, и левосторонняя ситуация движения транспорта имеет место, ЭБУ 10 содействия при вождении запрещает привлечение внимания, даже когда правосторонняя ситуация движения транспорта не имеет место. Когда ЭБУ 10 содействия при вождении определяет, что значение флага правостороннего привлечения внимания объекта равно 1 и значение флага правосторонней ситуации движения транспорта равно 1, ЭБУ 10 содействия при вождении определяет, что "несмотря на то, что присутствует целевой объект, приближающийся с правой стороны базового транспортного средства 100, движению целевого объекта создается препятствие из-за правосторонней ситуации движения транспорта, и, следовательно, целевой объект имеет очень низкую вероятность пересечения правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени", независимо от значения флага левосторонней ситуации движения транспорта. ЭБУ 10 содействия при вождении запрещает генерирование сигнала запроса и, следовательно, запрещает привлечение внимания к целевому объекту. То есть, когда присутствует целевой объект, приближающийся с правой стороны от базового транспортного средства 100, и правосторонняя ситуация движения транспорта имеет место, ЭБУ 10 содействия при вождении запрещает привлечение внимания, даже когда левосторонняя ситуация движения транспорта не имеет место.
Когда внимание не привлекается
[0095] Когда ЭБУ 10 содействия при вождении определяет, что значения флага левостороннего привлечения внимания и флага правостороннего привлечения внимания объекта равны 0, ЭБУ 10 содействия при вождении определяет, что целевой объект не присутствует (то есть, объект не является целевым объектом), независимо от значений флага левосторонней ситуации движения транспорта и флага правосторонней ситуации движения транспорта. ЭБУ 10 содействия при вождении не генерирует сигнал запроса и, соответственно, не привлекает внимание.
Конкретная работа первого осуществленного устройства
[0096] Далее будет описана конкретная работа первого осуществленного устройства. ЦП ЭБУ 10 содействия при вождении первого осуществленного устройства выполняет программы, проиллюстрированные на блок-схемах последовательности операций по фиг. с 8 по 11, каждый раз, когда истекает расчетный период времени Tcal. Программы выполняются, когда ЭБУ 10 содействия при вождении определяет, что базовое транспортное средство 100 едет прямо. Определение того, едет ли базовое транспортное средство 100 прямо, может быть выполнено на основании любого, например, из разницы между скоростью WS(n) вращения левого переднего колеса и скоростью WS(n) вращения правого переднего колеса, скорости Y(n) рыскания, угла рулевого управления и горизонтального ускорения. Далее в материалах настоящей заявки, будут описаны программы на n-ом цикле (n ≥ M). Далее в материалах настоящей заявки, ЦП ЭБУ 10 содействия при вождении будет просто указан ссылкой, как "ЦП".
[0097] Когда наступает предопределенный момент времени, ЦП начинает с процесса этапа 800 по фиг. 8 и выполняет процессы этапов с 802 по 808, описанные ниже по порядку.
Этап 802: ЦП получает информацию о базовом транспортном средстве (скорость SPDv(n) транспортного средства, скорость Y(n) рыскания, и тому подобное), как описано выше, и сохраняет информацию о базовом транспортном средстве в ОЗУ ЭБУ 10 содействия при вождении.
Этап 804: ЦП определяет направление TDv(n) движения базового транспортного средства 100 на основании информации о базовом транспортном средстве, полученной на этапе 802. ЦП устанавливает координатные оси (ось x и ось y), как описано выше, и сохраняет информацию, представляющую координатные оси, в ОЗУ ЭБУ 10 содействия при вождении.
Этап 806: На основании информации о базовом транспортном средстве, полученной на этапе 802, ЦП получает вектор a(n) скорости транспортного средства в координатной плоскости xy, сконфигурированной из координатных осей, установленных на этапе 804, и сохраняет вектор a(n) скорости транспортного средства в ОЗУ ЭБУ 10 содействия при вождении.
Этап 808: ЦП получает информацию об объекте (координаты относительного положения P(n) и вектор b(n) скорости (скорость SPDo(n) и направление TDo(n) движения) объекта), присутствующем вокруг базового транспортного средства 100, как описано выше, и сохраняет информацию об объекте в ОЗУ ЭБУ 10 содействия при вождении (ссылка на Общую формулу (4) и Общую формулу (5)).
[0098] Затем, ЦП переходит к этапу 810 и выполняет процесс определения целевого объекта. Затем, ЦП переходит к этапу 812 и выполняет процесс определения левосторонней/правосторонней ситуации движения транспорта. ЦП может выполнять процесс этапа 810 после выполнения процесса этапа 812, или может выполнять процесс этапа 812 вместе с процессом этапа 810.
[0099] В программе по фиг. 8, ЦП на этапе 810 выполняет программу, проиллюстрированную на блок-схеме последовательности операций по фиг. 9. Когда ЦП переходит к этапу 810, ЦП начинает с процесса этапа 900 по фиг. 9 и выполняет процессы этапа 902 и этапа 904 ниже по порядку.
[0100] Этап 902: ЦП рассчитывает формулу fL(n) левостороннего ожидаемого пути и формулу fR(n) правостороннего ожидаемого пути базового транспортного средства 100 в координатной плоскости xy, и сохраняет формулу fL(n) левостороннего ожидаемого пути и формулу fR(n) правостороннего ожидаемого пути в ОЗУ ЭБУ 10 содействия при вождении (ссылка на Общую формулу (6) и Общую формулу (7)).
Этап 904: ЦП выбирает любой объект на основании информации об объекте, полученной на этапе 808, рассчитывает формулу g(n) ожидаемого пути выбранного объекта в координатной плоскости xy, и сохраняет формулу g(n) ожидаемого пути в ОЗУ ЭБУ 10 содействия при вождении. Процессы этапов с 904 по 924, описанные ниже, выполняются для каждого выбранного объекта.
[0098] Затем, ЦП переходит к этапу 906 и определяет, с использованием формулы g(n), рассчитанной на этапе 904, установлено ли условие пересечения для объекта. Когда ЦП определяет, что условие пересечения установлено, ЦП выполняет определение "Да" на этапе 906 и выполняет процессы этапа 908 и этапа 910 ниже по порядку.
[0102] Этап 908: ЦП рассчитывает координаты пересечения Q(n), в которых линия, представленная формулой g(n), пересекается сначала с одной из линий, представленных формулой fL(n) левостороннего ожидаемого пути и формулой fR(n) правостороннего ожидаемого пути, и сохраняет координаты пересечения Q(n) в ОЗУ ЭБУ 10 содействия при вождении.
Этап 910: ЦП рассчитывает расстояние d(n) от базового транспортного средства 100 до пересечения Q(n), рассчитанного на этапе 908, и сохраняет расстояние d(n) в ОЗУ ЭБУ 10 содействия при вождении.
[0103] Затем, ЦП переходит к этапу 912 и определяет, с использованием расстояния d(n), рассчитанного на этапе 910, установлено ли условие длины (d(n) ≤ длины ожидаемого пути (7 м в настоящем примере)) для объекта, для которого ЦП на этапе 906 определил, что условие пересечения установлено. Когда ЦП определяет, что условие длины установлено, ЦП выполняет определение "Да" на этапе 912 и выполняет процесс этапа 914 ниже.
[0104] Этап 914: ЦП рассчитывает, как описано выше, период времени t(n), в течение которого объект, как ожидается, достигнет пересечения Q(n), и сохраняет период времени t(n) в ОЗУ ЭБУ 10 содействия при вождении.
[0105] Затем, ЦП переходит к этапу 916. ЦП определяет, с использованием периода времени t(n), рассчитанного на этапе 914, установлено ли условие периода времени (t(n) ≤ порогового периода времени (4 с в настоящем примере)) для объекта, для которого ЦП на этапе 912 определил, что условие длины установлено. Когда ЦП определяет, что условие периода времени установлено, ЦП выполняет определение "Да" на этапе 916 и переходит к этапу 918 ниже.
[0106] На этапе 918, ЦП определяет, установлено ли условие левостороннего положения (координата y относительного положения P(n) объекта больше или равна w/2) для объекта, для которого ЦП на этапе 916 определил, что условие периода времени установлено. Когда ЦП определяет, что условие левостороннего положения установлено, ЦП определяет, что объект приближается с левой стороны базового транспортного средства 100 (другими словами, ЦП определяет, что объект имеет вероятность пересечения левостороннего ожидаемого пути в пределах порогового периода времени). ЦП выполняет определение "Да" на этапе 918 и выполняет процесс этапа 920 ниже.
[0107] Этап 920: ЦП устанавливает значение флага левостороннего привлечения внимания на 1 и устанавливает значение флага правостороннего привлечения внимания на 0 для объекта, и сохраняет установленные значения флага левостороннего привлечения внимания и флага правостороннего привлечения внимания в ОЗУ ЭБУ 10 содействия при вождении в связи с объектом. Затем, ЦП переходит к этапу 926, описанному ниже. Флаг левостороннего привлечения внимания и флаг правостороннего привлечения внимания обеспечиваются для каждого объекта (каждого объекта, выбранного на этапе 904).
[0108] Когда ЦП определяет, что условие левостороннего положения установлено для объекта, для которого ЦП на этапе 916 определяет, что условие периода времени установлено, ЦП определяет, что объект приближается с правой стороны базового транспортного средства 100 (другими словами, ЦП определяет, что объект имеет вероятность пересечения правостороннего ожидаемого пути в пределах порогового периода времени). ЦП выполняет определение "Нет" на этапе 918 и выполняет процесс этапа 922 ниже.
[0109] Этап 922: ЦП устанавливает значение флага правостороннего привлечения внимания на 1 и устанавливает значение флага левостороннего привлечения внимания на 0 для объекта, и сохраняет установленные значения флага правостороннего привлечения внимания и флага левостороннего привлечения внимания в ОЗУ ЭБУ 10 содействия при вождении в связи с объектом. Затем, ЦП переходит к этапу 926, описанному ниже.
[0110] Когда ЦП на этапе 906 определяет, что условие пересечения не установлено, когда ЦП на этапе 912 определяет, что условие длины не установлено, или когда ЦП на этапе 916 определяет, что условие периода времени не установлено, ЦП определяет, что объект, выбранный на этапе 904, не приближается ни с левой стороны, ни с правой стороны базового транспортного средства 100 (другими словами, ЦП определяет, что объект имеет очень низкую вероятность пересечения каждого ожидаемого пути в пределах порогового периода времени). ЦП выполняет определение "Нет" на этапе 906, этапе 912 или этапе 916 и переходит к этапу 924 ниже.
[0111] Этап 924: ЦП устанавливает значение флага левостороннего привлечения внимания и значение флага правостороннего привлечения внимания на 0 для объекта, и сохраняет установленные значения флага левостороннего привлечения внимания и флага правостороннего привлечения внимания в ОЗУ ЭБУ 10 содействия при вождении в связи с объектом. Затем, ЦП переходит к этапу 926 ниже.
[0112] На этапе 926, ЦП определяет, выполнены ли процессы из этапа 904, описанные выше, для всех объектов, содержащих информацию об объекте, полученную на этапе 808 по фиг. 8. Когда ЦП определяет, что процессы, описанные выше, еще не выполнены для всех объектов, ЦП выполняет определение "Нет" на этапе 926, возвращается к этапу 904 и повторяет процессы из этапа 904 для оставшихся объектов. Когда ЦП определяет, что процессы, описанные выше, выполнены для всех объектов, ЦП выполняет определение "Да" на этапе 926 и переходит к этапу 812 по фиг. 8 через этап 928.
[0113] В программе по фиг. 8, ЦП на этапе 812 выполняет программы, проиллюстрированные на блок-схемах последовательности операций по фиг. 10 и фиг. 11. Когда ЦП переходит к этапу 812, ЦП начинает с процесса этапа 1000 по фиг. 10 и выполняет процессы этапа 1002 и этапа 1004, описанные ниже по порядку.
[0114] Этап 1002: ЦП устанавливает левостороннюю область Rsl(n) одинакового направления, правостороннюю область Rsr(n) одинакового направления, левостороннюю область Rol(n) противоположного направления и правостороннюю область Ror(n) противоположного направления на координатной плоскости xy, как описано выше (ссылка на Общую формулу (8) и Общую формулу (11)).
Этап 1004: ЦП выбирает любой объект из объектов, содержащих информацию об объекте, полученную на этапе 808. ЦП рассчитывает угловой сдвиг θ(n) (0° ≤ θ(n) ≤ 180°) между направлением TDv(n) движения базового транспортного средства 100 и направлением TDo(n) движения выбранного объекта на основании вектора a(n) скорости транспортного средства, полученного на этапе 806 по фиг. 8, и вектора b(n) скорости объекта выбранного объекта, полученного на этапе 808. ЦП сохраняет угловой сдвиг θ(n) в ОЗУ ЭБУ 10 содействия при вождении в связи с объектом. Процессы этапов с 1004 по 1030, описанные ниже, выполняются для каждого выбранного объекта.
[0115] Затем, ЦП переходит к этапу 1006 и определяет, является ли угловой сдвиг θ(n), рассчитанный на этапе 1004, меньше или равным первому угловому пороговому значению (90° в настоящем примере). ЦП определяет, что угловой сдвиг θ(n) меньше или равен первому угловому пороговому значению (то есть, когда 0° ≤ θ(n) ≤ 90° удовлетворено), ЦП выполняет определение "Да" на этапе 1006 и переходит к этапу 1008 ниже.
[0116] На этапе 1008, ЦП определяет установлено ли условие области одинакового направления (координаты относительного положения P(n) объекта одинакового направления удовлетворяют Общей формуле (8) и Общей формуле (9)) для объекта, для которого ЦП на этапе 1006 определил, что угловой сдвиг θ(n) меньше или равен первому угловому пороговому значению (объекта одинакового направления). Когда ЦП определяет, что условие области одинакового направления установлено, ЦП выполняет определение "Да" на этапе 1008 и переходит к этапу 1010 ниже.
[0117] На этапе 1010, ЦП определяет, удовлетворяет ли скорость SPDo(n) условию скорости одинакового направления (5.56 ≤ SPDo(n) ≤ 27.78 в настоящем примере) для объекта, для которого ЦП на этапе 1008 определил, что условие области одинакового направления установлено (объекта одинакового направления в области). Когда ЦП определяет, что условие скорости одинакового направления установлено, ЦП выполняет определение "Да" на этапе 1010 и переходит к этапу 1012 ниже.
[0118] На этапе 1012, ЦП определяет, установлено ли условие угла одинакового направления (0° ≤ θ(n) ≤ 20°), состоящее в том, что угловой сдвиг θ(n), рассчитанный на этапе 1004, меньше или равен второму угловому пороговому значению (20° в настоящем примере) для объекта, для которого ЦП на этапе 1010 определил, что условие скорости одинакового направления установлено (объекта одинакового направления в области, удовлетворяющего условию скорости одинакового направления). Когда ЦП определяет, что условие угла одинакового направления установлено, ЦП выполняет определение "Да" на этапе 1012 и переходит к этапу 1014 ниже.
[0119] На этапе 1014, ЦП определяет, удовлетворяют ли Общей формуле (8) координаты относительного положения P(n) объекта, для которого ЦП на этапе 1012 определил, что условие угла одинакового направления установлено (объекта одинакового направления в области, удовлетворяющего условиям). Когда ЦП определяет, что Общая формула (8) удовлетворена, ЦП выполняет определение "Да" на этапе 1014 (то есть, определяет, что объект присутствует в левосторонней области Rsl(n) одинакового направления) и выполняет процесс этапа 1016 ниже.
[0120] Этап 1016: ЦП увеличивает значение левостороннего счетчика ksl одинакового направления на один и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1032, описанному ниже.
[0121] Когда ЦП определяет, что координаты относительного положения P(n) объекта, для которого ЦП на этапе 1012 определил, что условие угла одинакового направления установлено (объекта одинакового направления в области, удовлетворяющего условиям) не удовлетворяют Общей формуле (8), ЦП выполняет определение "Нет" на этапе 1014 (то есть, определяет, что объект присутствует в правосторонней области Rsr(n) одинакового направления) и выполняет процесс этапа 1018 ниже.
[0122] Этап 1018: ЦП увеличивает значение правостороннего счетчика ksr одинакового направления на один и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1032, описанному ниже.
[0123] Когда ЦП на этапе 1008 определяет, что условие области одинакового направления не установлено, ЦП на этапе 1010 определяет, что условие скорости одинакового направления не установлено, или когда ЦП на этапе 1012 определяет, что условие угла одинакового направления не установлено, ЦП выполняет определение "Нет" на этапе 1008, этапе 1010 или этапе 1012 и переходит к этапу 1032, описанному ниже.
[0124] Когда ЦП определяет, что угловой сдвиг θ(n), рассчитанный на этапе 1004, больше первого углового порогового значения (90 в настоящем примере) (то есть, когда 90° ≤ θ(n) ≤ 180° удовлетворено), ЦП выполняет определение "Нет" на этапе 1006 и переходит к этапу 1020 ниже.
[0125] На этапе 1020, ЦП определяет установлено ли условие области противоположного направления (координаты относительного положения P(n) объекта противоположного направления удовлетворяют Общей формуле (10) и Общей формуле (11)) для объекта, для которого ЦП на этапе 1006 определил, что угловой сдвиг θ(n) больше первого углового порогового значения (объекта противоположного направления). Когда ЦП определяет, что условие области противоположного направления установлено, ЦП выполняет определение "Да" на этапе 1020 и переходит к этапу 1022 ниже.
[0126] На этапе 1022, ЦП определяет, удовлетворяет ли скорость SPDo(n) условию скорости противоположного направления (2.8 ≤ SPDo(n) ≤ 27.78 в настоящем примере) для объекта, для которого ЦП на этапе 1020 определил, что условие области противоположного направления установлено (объекта противоположного направления в области). Когда ЦП определяет, что условие скорости противоположного направления установлено, ЦП выполняет определение "Да" на этапе 1022 и переходит к этапу 1024 ниже.
[0127] На этапе 1024, ЦП определяет, установлено ли условие угла противоположного направления (160° ≤ θ(n) ≤ 180°), состоящее в том, что угловой сдвиг θ(n), рассчитанный на этапе 1004, больше или равен третьему угловому пороговому значению (160° в настоящем примере) для объекта, для которого ЦП на этапе 1022 определил, что условие скорости противоположного направления установлено (объекта противоположного направления в области, удовлетворяющего условию скорости противоположного направления). Когда ЦП определяет, что условие угла противоположного направления установлено, ЦП выполняет определение "Да" на этапе 1024 и переходит к этапу 1026 ниже.
[0128] На этапе 1026, ЦП определяет, удовлетворяют ли Общей формуле (10) координаты относительного положения P(n) объекта, для которого ЦП на этапе 1024 определил, что условие угла противоположного направления установлено (объекта противоположного направления в области, удовлетворяющего условиям). Когда ЦП определяет, что Общая формула (10) удовлетворена, ЦП выполняет определение "Да" на этапе 1026 (то есть, определяет, что объект присутствует в левосторонней области Rol(n) противоположного направления) и выполняет процесс этапа 1028 ниже.
[0129] Этап 1028: ЦП увеличивает значение левостороннего счетчика kol противоположного направления на один и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1032, описанному ниже.
[0130] Когда ЦП определяет, что координаты относительного положения P(n) объекта, для которого ЦП на этапе 1024 определил, что условие угла противоположного направления установлено (объекта противоположного направления в области, удовлетворяющего условиям), не удовлетворяют Общей формуле (10), ЦП выполняет определение "Нет" на этапе 1026 (то есть, определяет, что объект присутствует в правосторонней области Ror(n) противоположного направления) и выполняет процесс этапа 1030 ниже.
[0131] Этап 1030: ЦП увеличивает значение правостороннего счетчика kor противоположного направления на один и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1032, описанному ниже.
[0132] Когда ЦП на этапе 1020 определяет, что условие области противоположного направления не установлено, когда ЦП на этапе 1022 определяет, что условие скорости противоположного направления не установлено, или когда ЦП на этапе 1024 определяет, что условие угла противоположного направления не установлено, ЦП выполняет определение "Нет" на этапе 1020, этапе 1022 или этапе 1024 и переходит к этапу 1032 ниже.
[0133] На этапе 1032 (ссылка на фиг. 11), ЦП определяет, выполнены ли процессы из этапа 1004, описанные выше, для всех объектов, содержащих информацию об объекте, полученную на этапе 808 по фиг. 8. Когда ЦП определяет, что процессы, описанные выше, еще не выполнены для всех объектов, ЦП выполняет определение "Нет" на этапе 1032, возвращается к этапу 1004 по фиг. 10, и повторяет процессы из этапа 1004 для оставшихся объектов. Когда ЦП определяет, что процессы, описанные выше, выполнены для всех объектов, ЦП выполняет определение "Да" на этапе 1032 и переходит к этапу 1034 ниже.
[0134] Этап 1034: ЦП рассчитывает количество левосторонних объектов (то есть, количество левосторонних объектов в области, удовлетворяющих условиям на n-ом цикле) из суммы значения левостороннего счетчика ksl одинакового направления на этапе 1016 и значения левостороннего счетчика kol противоположного направления на этапе 1028, и сохраняет количество левосторонних объектов в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП выполняет процесс этапа 1036.
[0135] Этап 1036: ЦП рассчитывает общее количество левосторонних объектов посредством суммирования количества левосторонних объектов на n-ом цикле, рассчитанного на этапе 1034, с суммой последних полученных (M-1) количеств левосторонних объектов (то есть, суммой количеств левосторонних объектов с (n-4)-ого цикла по (n-1)-ый цикл), и сохраняет общее количество левосторонних объектов в ОЗУ ЭБУ 10 содействия при вождении.
[0136] Затем, ЦП переходит к этапу 1038 и определяет, является ли общее количество левосторонних объектов, рассчитанное на этапе 1036, больше или равным левостороннему пороговому значению. Когда общее количество левосторонних объектов больше или равно левостороннему пороговому значению, ЦП определяет, что имеет место левосторонняя ситуация движения транспорта. В таком случае, ЦП выполняет определение "Да" на этапе 1038 и выполняет процесс этапа 1040 ниже.
[0137] Этап 1040: ЦП устанавливает значение флага левосторонней ситуации движения транспорта на 1 и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1046.
[0138] Когда ЦП определяет, что общее количество левосторонних объектов меньше левостороннего порогового значения, ЦП определяет, что левосторонняя ситуация движения транспорта не имеет место, выполняет определение "Нет" на этапе 1038 и выполняет процесс этапа 1044 ниже.
[0139] Этап 1044: ЦП устанавливает значение флага левосторонней ситуации движения транспорта на 0 и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1046.
[0140] Этап 1046: ЦП рассчитывает количество правосторонних объектов (то есть, количество правосторонних объектов в области, удовлетворяющих условиям на n-ом цикле) из суммы значения правостороннего счетчика ksr одинакового направления на этапе 1018 и значения правостороннего счетчика kor противоположного направления на этапе 1030, и сохраняет количество правосторонних объектов в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1048.
[0141] Этап 1048: ЦП рассчитывает общее количество правосторонних объектов посредством суммирования количества правосторонних объектов на n-ом цикле, рассчитанного на этапе 1046, с суммой недавно полученных (M-1) количеств правосторонних объектов (то есть, суммой количеств правосторонних объектов с (n-4)-ого цикла по (n-1)-ый цикл), и сохраняет значение общего количества правосторонних объектов в ОЗУ ЭБУ 10 содействия при вождении.
[0142] Затем, ЦП переходит к этапу 1050 и определяет, является ли общее количество правосторонних объектов, рассчитанное на этапе 1048, больше или равным правостороннему пороговому значению. [0138] Когда ЦП определяет, что общее количество правосторонних объектов больше или равно левостороннему пороговому значению, ЦП определяет, что имеет место правосторонняя ситуация движения транспорта, выполняет определение "Да" на этапе 1050 и выполняет процесс этапа 1052 ниже.
[0143] Этап 1052: ЦП устанавливает значение флага правосторонней ситуации движения транспорта на 1 и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 814 по фиг. 8 через этап 1042.
[0144] Когда ЦП определяет, что общее количество правосторонних объектов меньше правостороннего порогового значения, ЦП определяет, что правосторонняя ситуация движения транспорта не имеет место, выполняет определение "Нет" на этапе 1050 и выполняет процесс этапа 1054 ниже.
[0145] Этап 1054: ЦП устанавливает значение флага правосторонней ситуации движения транспорта на 0 и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 814 по фиг. 8 через этап 1042.
[0146] На этапе 814 по фиг. 8, ЦП выбирает любой объект, содержащий информацию об объекте, полученную на этапе 808, и определяет, равняется ли 0 значение флага левостороннего привлечения внимания выбранного объекта, и равняется ли 0 значение флага правостороннего привлечения внимания выбранного объекта. Когда значения обоих флагов равны 0, ЦП выполняет определение "Да" на этапе 814 (то есть, определяет, что объект не является целевым объектом) независимо от значений флага левосторонней ситуации движения транспорта и флага правосторонней ситуации движения транспорта, и выполняет процесс этапа 816 ниже. ЦП выполняет процессы этапов с 814 по 824 для каждого выбранного объекта (ссылка на этап 826, описанный ниже).
[0147] Этап 816: ЦП не генерирует сигнал запроса для выбранного объекта. Таким образом, внимание не привлекается к выбранному объекту посредством устройства 21 отображения. Затем, ЦП переходит к этапу 826, описанному ниже.
[0148] Когда одно из "значения флага левосторонней ситуации движения транспорта и значения флага правосторонней ситуации движения транспорта" выбранного объекта равняется 1, ЦП выполняет определение "Нет" на этапе 814 и переходит к этапу 818 ниже.
[0149] На этапе 818, ЦП определяет, равняется ли 1 значение флага левостороннего привлечения внимания выбранного объекта и равняется ли 1 значение флага левосторонней ситуации движения транспорта выбранного объекта. Когда значения обоих флагов равны 1, ЦП выполняет определение "Да" на этапе 818 (то есть, определяет, что, несмотря на то, что выбранный объект является целевым объектом, приближающимся с левой стороны базового транспортного средства 100 (то есть, левым целевым объектом), левосторонняя ситуация движения транспорта препятствует движению целевого объекта, и, следовательно, целевой объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), независимо от значения флага правосторонней ситуации движения транспорта, и переходит к этапу 820, описанному ниже.
[0150] Когда одно из значения флага левостороннего привлечения внимания и значения флага левосторонней ситуации движения транспорта выбранного объекта равняется 0, ЦП выполняет определение "Нет" на этапе 818 и переходит к этапу 822 ниже.
[0151] На этапе 822, ЦП определяет, равняется ли 1 значение флага правостороннего привлечения внимания выбранного объекта и равняется ли 1 значение флага правосторонней ситуации движения транспорта выбранного объекта. Когда значения обоих флагов равны 1, ЦП выполняет определение "Да" на этапе 822 (то есть, определяет, что, несмотря на то, что присутствует объект, приближающийся с правой стороны базового транспортного средства 100 (то есть, правый целевой объект), правосторонняя ситуация движения транспорта препятствует движению целевого объекта, и, следовательно, целевой объект имеет очень низкую вероятность пересечения правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), независимо от значения флага левосторонней ситуации движения транспорта, и переходит к этапу 820, описанному ниже.
[0152] Этап 820: ЦП запрещает генерирование сигнала запроса для выбранного объекта. Таким образом, привлечение внимания к выбранному объекту посредством устройства 21 отображения запрещается. Затем, ЦП переходит к этапу 826, описанному ниже.
[0153] Когда значение флага левостороннего привлечения внимания выбранного объекта равно 1 и значение флага левосторонней ситуации движения транспорта выбранного объекта равно 0, ЦП выполняет определение "Нет" на этапе 822 (то есть, определяет, что выбранный объект является целевым объектом, приближающимся с левой стороны базового транспортного средства 100, и целевой объект движется без препятствия его движению, так как ситуация движения транспорта, препятствующая движению целевого объекта, не имеет место с левой стороны от базового транспортного средства 100, и, следовательно, целевой объект имеет вероятность пересечения левостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), независимо от значения флага правосторонней ситуации движения транспорта, и переходит к этапу 824 ниже. Когда значение флага правостороннего привлечения внимания объекта равно 1 и значение флага правосторонней ситуации движения транспорта объекта равно 0, ЦП выполняет определение "Нет" на этапе 822 (то есть, определяет, что выбранный объект является целевым объектом, приближающимся с правой стороны базового транспортного средства 100, и целевой объект движется без препятствия его движению, так как ситуация движения транспорта, препятствующая движению целевого объекта, не имеет место с правой стороны от базового транспортного средства 100, и, следовательно, целевой объект имеет вероятность пересечения правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), независимо от значения флага левосторонней ситуации движения транспорта, и переходит к этапу 824 ниже.
[0154] Этап 824: ЦП генерирует сигнал запроса для выбранного объекта и передает сигнал запроса на ЭБУ 20 отображения. Следовательно, внимание привлекается к выбранному объекту посредством устройства 21 отображения. Затем, ЦП переходит к этапу 826 ниже.
[0155] На этапе 826, ЦП определяет, выполнены ли процессы из этапа 814, описанные выше, для всех объектов, содержащих информацию об объекте, полученную на этапе 808. Когда процессы, описанные выше, еще не выполнены для всех объектов, ЦП выполняет определение "Нет" на этапе 826, возвращается к этапу 814 и повторяет процессы из этапа 814 для оставшихся объектов. Когда, например, любой процесс этапа 816 и этапа 820 выполняется для объекта B, отличного от объекта A, во время привлечения внимания к объекту A посредством процесса этапа 824, состояние привлечения внимания к объекту A продолжается. Когда, например, процесс этапа 824 выполняется для объекта B, отличного от объекта A, во время привлечения внимания к объекту A посредством процесса этапа 824, внимание привлекается как к объекту A, так и к объекту B. То есть, определение того, стоит ли привлекать внимание, выполняется для каждого объекта. Когда процессы, описанные выше, выполнены для всех объектов, ЦП выполняет определение "Да" на этапе 826 и выполняет процессы этапа 828 и этапа 830 ниже по порядку.
[0156] Этап 828: ЦП инициализирует (устанавливает на 0) значения флага левостороннего привлечения внимания и флага правостороннего привлечения внимания для каждого объекта. ЦП инициализирует (устанавливает на 0) значения флага левосторонней ситуации движения транспорта и флага правосторонней ситуации движения транспорта. Значения флага левостороннего привлечения внимания и флага правостороннего привлечения внимания и значения флага левосторонней ситуации движения транспорта и флага правосторонней ситуации движения транспорта инициализируются ЦП, когда переключатель двигателя переводят из состояния ВЫКЛ в состояние ВКЛ.
Этап 830: ЦП инициализирует (устанавливает на 0) значение левостороннего счетчика ksl одинакового направления, правостороннего счетчика ksr одинакового направления, левостороннего счетчика kol противоположного направления и правостороннего счетчика kor противоположного направления. Значения счетчиков инициализируются ЦП, когда переключатель двигателя переводят из состояния ВЫКЛ в состояние ВКЛ. Затем, ЦП переходит к этапу 832 и временно завершает текущую программу.
[0157] Будут описаны результаты первого осуществленного устройства. Первое осуществленное устройство определяет, имеет ли место ситуация движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта. Даже когда первое осуществленное устройство определяет, что целевой объект присутствует, первое осуществленное устройство запрещает привлечение внимания, когда первое осуществленное устройство определяет, что имеет место ситуация движения транспорта. Когда имеет место ситуация движения транспорта, целевой объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути и правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени. Соответственно, даже когда первое осуществленное устройство определяет, что целевой объект присутствует, первое осуществленное устройство может запретить привлечение внимания, если фактически целевой объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути и правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени из-за имеющей место ситуации движения транспорта. Таким образом, первое осуществленное устройство может существенно снизить вероятность ненужного привлечения внимания, и может более надлежащим образом привлекать внимание водителя базового транспортного средства.
[0158] Первое осуществленное устройство может определять, приближается ли целевой объект с левой стороны или с правой стороны базового транспортного средства 100. Первое осуществленное устройство может определять, имеет ли место ситуация движения транспорта с левой стороны или с правой стороны базового транспортного средства 100. Соответственно, когда первое осуществленное устройство определяет, что сторона, с которой целевой объект приближается к базовому транспортному средству 100, совпадает со стороной, с которой имеет место ситуация движения транспорта, относительно базового транспортного средства 100 (то есть, когда ситуация движения транспорта с высокой вероятностью будет препятствовать движению целевого объекта), первое осуществленное устройство может запретить привлечение внимания к целевому объекту. Другими словами, когда первое осуществленное устройство определяет, что сторона, с которой целевой объект приближается к базовому транспортному средству 100, отличается от стороны, с которой имеет место ситуация движения транспорта, относительно базового транспортного средства 100 (то есть, когда ситуация движения транспорта не может препятствовать движению целевого объекта), первое осуществленное устройство может привлечь внимание к целевому объекту. Соответственно, вероятность ненужного привлечения внимания может быть уменьшена с сохранением надежности привлечения внимания.
[0159] В ЭБУ 10 содействия при вождении, длина (7 м) левосторонней области Rsl одинакового направления и длина (25 м) левосторонней области Rol противоположного направления в части, расположенной перед базовым транспортным средством 100 (то есть, в диапазоне x ≥ 0 в координатной плоскости xy) больше или равна длине каждого ожидаемого пути базового транспортного средства 100 (7 м в настоящем примере). Таким образом, линия, представленная формулой g целевого объекта (то есть, объекта, имеющего вероятность пересечения части в пределах длины левостороннего ожидаемого пути и/или правостороннего ожидаемого пути в пределах предопределенного периода времени), пересекает область Rsl и область Rol. Соответственно, когда "левосторонний объект в области, удовлетворяющий условиям" присутствует в области Rsl и области Rol, "левосторонний объект в области, удовлетворяющий условиям" имеет вероятность препятствия движению целевого объекта. Таким образом, наличие левосторонней ситуации движения транспорта может быть надлежащим образом определено посредством определения того, что имеет место левосторонняя ситуация движения транспорта, когда общее количество левосторонних объектов, которое является суммой количества "левосторонних объектов в области, удовлетворяющих условиям", в предопределенном периоде больше или равно левостороннему пороговому значению. Схожим образом, длина (7 м) правосторонней области Rsr одинакового направления и длина (25 м) правосторонней области Ror противоположного направления в части, расположенной перед базовым транспортным средством 100 больше или равна длине каждого ожидаемого пути базового транспортного средства 100 (7 м в настоящем примере). Таким образом, линия, представленная формулой g целевого объекта, пересекает область Rsr и область Ror. Соответственно, когда "правосторонний объект в области, удовлетворяющий условиям" присутствует в области Rsr и области Ror, "правосторонний объект в области, удовлетворяющий условиям" имеет вероятность препятствия движению целевого объекта. Таким образом, наличие правосторонней ситуации движения транспорта может быть надлежащим образом определено посредством определения того, что имеет место правосторонняя ситуация движения транспорта, когда общее количество правосторонних объектов, которое является суммой количества "правосторонних объектов в области, удовлетворяющих условиям", в предопределенном периоде больше или равно правостороннему пороговому значению.
Второй вариант осуществления
[0160] Далее будет описано устройство содействия при вождении согласно второму варианту осуществления (далее в материалах настоящей заявки, указываемое ссылкой, как "второе осуществленное устройство"). Во втором осуществленном устройстве, способ расчета для определения того, присутствует ли целевой объект, и способ расчета для определения того, имеет ли место ситуация движения транспорта, отличаются от ЭБУ 10 содействия при вождении. То есть, что касается первого способа, ЭБУ 10 содействия при вождении определяет, приближается ли целевой объект с левой стороны или с правой стороны базового транспортного средства 100, посредством определения того, установлено ли условие левостороннего положения для объекта (целевого объекта), удовлетворяющего условию пересечения, условию длины и условию периода времени. Второе осуществленное устройство определяет, установлены ли условие пересечения, условие длины и условие периода времени, и не определяет, установлено ли условие левостороннего положения. То есть, второе осуществленное устройство не определяет, приближается ли целевой объект с левой стороны или с правой стороны базового транспортного средства 100. Что касается последнего способа, ЭБУ 10 содействия при вождении по отдельности определяет, имеет ли место левосторонняя ситуация движения транспорта, и имеет ли место правосторонняя ситуация движения транспорта, посредством отдельного расчета количества левосторонних объектов (количества левосторонних объектов в области, удовлетворяющих условиям в одном цикле) и количества правосторонних объектов (количества правосторонних объектов в области, удовлетворяющих условиям в одном цикле). Второе осуществленное устройство рассчитывает количество объектов, которое является суммой количества левосторонних объектов и количества правосторонних объектов (то есть, количество объектов в области, удовлетворяющих условиям в одном цикле), без разделения количества объектов на количество левосторонних объектов и количество правосторонних объектов. Второе осуществленное устройство рассчитывает общее количество объектов, которое является суммой количества объектов в предопределенном периоде. Когда общее количество объектов больше или равно предопределенному пороговому значению, второе осуществленное устройство определяет, что ситуация движения транспорта (конкретная ситуация движения транспорта) имеет место вокруг базового транспортного средства 100.
[0161] Второе осуществленное устройство отличается от ЭБУ 10 содействия при вождении тем, что второе осуществленное устройство не определяет, приближается ли целевой объект с левой стороны или с правой стороны базового транспортного средства 100, и тем, что второе осуществленное устройство не определяет по отдельности, имеет ли место левосторонняя ситуация движения транспорта, и имеет ли место правосторонняя ситуация движения транспорта. Таким образом, далее в материалах настоящей заявки, отличие от ЭБУ 10 содействия при вождении будет конкретно описано со ссылкой на фиг. с 12 по 15.
E. Работа, связанная с определением целевого объекта
Установка флага привлечения внимания
[0162] Когда второе осуществленное устройство извлекает объект в качестве объекта, удовлетворяющего всем из условия пересечения, условия длины и условия периода времени, второе осуществленное устройство определяет, что объект имеет вероятность пересечения левостороннего ожидаемого пути и/или правостороннего ожидаемого пути, и устанавливает значение флага привлечения внимания на 1 для объекта. Когда второе осуществленное устройство определяет, что объект является объектом, не удовлетворяющим любому из условия пересечения, условия длины и условия периода времени, второе осуществленное устройство определяет, что объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути и/или правостороннего ожидаемого пути, и устанавливает значение флага привлечения внимания на 0 для объекта. ЭБУ 10 содействия при вождении второго осуществленного устройства сохраняет значение флага привлечения внимания, установленного для каждого объекта в его ОЗУ в связи с каждым объектом. Фиг. 12 совпадает с фиг. 4 за исключением следующих моментов.
Второе осуществленное устройство установлено в базовое транспортное средство 100 вместо первого осуществленного устройства.
Установлена область Rs(n) одинакового направления, в которой объединены левосторонняя область Rsl(n) одинакового направления и правосторонняя область Rsr(n) одинакового направления (описано ниже).
Установлена область Ro(n) противоположного направления, в которой объединены левосторонняя область Rol(n) противоположного направления и правосторонняя область Ror(n) противоположного направления (описано ниже).
В примере по фиг. 12, второе осуществленное устройство устанавливает значение флага привлечения внимания на 1 для каждого из "объекта B и объекта D", извлеченных в качестве объектов, удовлетворяющих всем из условия пересечения, условия длины и условия периода времени, и устанавливает значение флага привлечения внимания на 0 для каждого из "объекта A, объекта C, и объектов с E по G", которые не извлечены, так как они не удовлетворяют условию пересечения.
F. Работа, связанная с определением ситуации движения транспорта
Установка области одинакового направления и области противоположного направления
[0163] Как проиллюстрировано на фиг. 12, второе осуществленное устройство устанавливает область Rs(n) одинакового направления, в которой объединены левосторонняя область Rsl(n) одинакового направления и правосторонняя область Rsr(n) одинакового направления, и область Ro(n) противоположного направления, в которой объединены левосторонняя область Rol(n) противоположного направления и правосторонняя область Ror(n) противоположного направления.
Подсчет количества объектов
[0164] Второе осуществленное устройство подсчитывает количество "объектов в области, удовлетворяющих условиям (описанным выше)", присутствующим вокруг базового транспортного средства 100.
[0165] В частности, второе осуществленное устройство подсчитывает количество объектов, удовлетворяющих всем из условия области одинакового направления, условия скорости одинакового направления и условия угла одинакового направления, в качестве количества "объектов одинакового направления в области, удовлетворяющих условиям", посредством счетчика ks одинакового направления. Второе осуществленное устройство подсчитывает количество объектов, удовлетворяющих всем из условия области противоположного направления, условия скорости противоположного направления и условия угла противоположного направления, в качестве количества "объектов противоположного направления в области, удовлетворяющих условиям", посредством счетчика ko противоположного направления. Второе осуществленное устройство рассчитывает сумму обоих подсчитанных количеств (= ks+ko) в качестве количества "объектов в области, удовлетворяющих условиям", присутствующих вокруг базового транспортного средства 100 (далее в материалах настоящей заявки, это количество будет указано ссылкой, как "количество объектов").
[0166] Согласно такому же предположению, как и в первом варианте осуществления в примере по фиг. 12, объект A классифицирован в качестве "объекта одинакового направления в области, удовлетворяющего условиям" на n-ом цикле и, таким образом, количество таких объектов равно одному. Объект E и объект F классифицированы в качестве "объектов противоположного направления в области, удовлетворяющих условиям" на n-ом цикле и, таким образом, количество таких объектов равно двум. Таким образом, второе осуществленное устройство рассчитывает сумму обоих подсчитанных количеств (то есть, три) в качестве количества "объектов в области, удовлетворяющих условиям" (количества объектов).
Подсчет общего количества объектов
[0167] Второе осуществленное устройство рассчитывает общее количество объектов, которое является суммой количества объектов в предопределенном периоде. Общее количество объектов рассчитывается, как сумма последних полученных M количеств объектов, включающих в себя количество объектов, полученное на самом последнем цикле. Согласно такому же предположению, как в первом варианте осуществления в примере по фиг. 12, количество "объектов одинакового направления в области, удовлетворяющих условиям", равно нулю, нулю, нулю, одному и одному в порядке от (n-4)-ого цикла до n-ого цикла. Количество "объектов противоположного направления в области, удовлетворяющих условиям", равно одному, одному, двум, двум и двум в порядке от (n-4)-ого цикла до n-ого цикла. Таким образом, количество "объектов в области, удовлетворяющих условиям" (количество объектов) равно одному, одному, двум, трем и трем по порядку. Соответственно, второе осуществленное устройство рассчитывает сумму количества "объектов в области, удовлетворяющих условиям" (то есть, 10) в качестве общего количества объектов.
Определение того, имеет ли место ситуация движения транспорта, и установка флага ситуации движения транспорта
[0168] Второе осуществленное устройство определяет, является ли общее количество объектов больше или равным предопределенному пороговому значению. Когда общее количество объектов больше или равно пороговому значению, второе осуществленное устройство определяет, что имеет место "ситуация, в которой "объект в области, удовлетворяющий условиям" препятствует движению целевого объекта (далее в материалах настоящей заявки, ситуация может быть указана ссылкой, как "ситуация движения транспорта")", и устанавливает значение флага ситуации движения транспорта на 1. Когда общее количество объектов меньше порогового значения, второе осуществленное устройство определяет, что ситуация движения транспорта не имеет место, и устанавливает значение флага ситуации движения транспорта на 0. ЭБУ 10 содействия при вождении второго осуществленного устройства сохраняет установленное значение флага ситуации движения транспорта в ОЗУ ЭБУ 10 содействия при вождении.
[0169] Пороговое значение предполагается равным семи в примере по фиг. 12. Согласно предположению, так как общее количество объектов равно 10, как описано выше, общее количество объектов больше или равно пороговому значению. Соответственно, второе осуществленное устройство определяет, что ситуация движения транспорта имеет место, и устанавливает значение флага ситуации движения транспорта на 1.
G. Работа, связанная с определением привлечения внимания
[0170] Когда двигатель находится в состоянии ВКЛ, или каждый раз, когда истекает расчетный период времени Tcal, второе осуществленное устройство определяет, должно ли внимание быть привлечено, для каждого объекта на основании значения флага привлечения внимания и значения флага ситуации движения транспорта каждого объекта.
Когда привлекается внимание
[0171] В частности, когда второе осуществленное устройство определяет, что значение флага привлечения внимания объекта равно 1, а значение флага ситуации движения транспорта объекта равно 0, второе осуществленное устройство определяет, что "целевой объект присутствует, целевой объект движется без препятствия его движению, так как ситуация движения транспорта, препятствующая движению целевого объекта, не имеет место, и, следовательно, целевой объект имеет вероятность пересечения левостороннего ожидаемого пути и/или правостороннего ожидаемого пути базового транспортного средства 100". Второе осуществленное устройство генерирует сигнал запроса для целевого объекта и привлекает внимание к целевому объекту с использованием устройства 21 отображения.
Когда привлечение внимания запрещено
[0172] Когда второе осуществленное устройство определяет, что значение флага привлечения внимания объекта равно 1, и значение флага ситуации движения транспорта объекта равно 1, второе осуществленное устройство определяет, что "целевой объект присутствует, ситуация движения транспорта препятствует движению целевого объекта, и, следовательно, целевой объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути и/или правостороннего ожидаемого пути базового транспортного средства 100". Второе осуществленное устройство запрещает генерирование сигнала запроса для целевого объекта и, следовательно, запрещает привлечение внимания к целевому объекту.
Когда внимание не привлекается
[0173] Когда второе осуществленное устройство определяет, что значение флага привлечения внимания объекта равно 0, второе осуществленное устройство определяет, что объект не является целевым объектом, независимо от значения флага ситуации движения транспорта. Второе осуществленное устройство не генерирует сигнал запроса для целевого объекта и, соответственно, не привлекает внимание к объекту.
Конкретная работа второго осуществленного устройства
[0174] Далее будет описана конкретная работа второго осуществленного устройства. ЦП ЭБУ 10 содействия при вождении второго осуществленного устройства выполняет программы, проиллюстрированные на блок-схемах последовательности операций по фиг. с 13 по 15, каждый раз, когда истекает расчетный период времени Tcal. Далее в материалах настоящей заявки, будут описаны программы на n-ом цикле (n ≥ M).
[0175] Когда наступает предопределенный момент времени, ЦП начинает с процесса этапа 1300 по фиг. 13 и выполняет процессы этапов с 1302 по 1308. Процессы этапов с 1302 по 1308, соответственно, совпадают с процессами этапов с 802 по 808 по фиг. 8, и, таким образом, не будут описаны.
[0176] Когда ЦП завершает процесс этапа 1308, ЦП выполняет процесс определения целевого объекта на этапе 1310, и затем выполняет процесс определения ситуации движения транспорта на этапе 1312. Далее в материалах настоящей заявки, сначала будет описан процесс этапа 1310, и, затем, будет описан процесс этапа 1312. ЦП может выполнять процесс этапа 1310 после выполнения процесса этапа 1312, или может выполнять этап 1312 вместе с этапом 1310.
[0177] В программе по фиг. 13, ЦП на этапе 1310 выполняет программу, проиллюстрированную на блок-схеме последовательности операций по фиг. 14. Когда ЦП переходит к этапу 1310, ЦП начинает с процесса этапа 1400 по фиг. 14. Процессы или определения этапов с 1402 по 1416 по фиг. 14, соответственно, совпадают с процессами или определениями этапов с 902 по 916 по фиг. 9, и, таким образом, не будут описаны.
[0178] Когда ЦП выполняет определение "Да" на этапе 1416 (то есть, когда ЦП определяет, что условие периода времени установлено), ЦП переходит к этапу 1418 ниже.
[0179] Этап 1418: ЦП устанавливает значение флага привлечения внимания на 1 для объекта, для которого ЦП на этапе 1416 определяет, что условие периода времени установлено, и сохраняет установленное значение в ОЗУ ЭБУ 10 содействия при вождении в связи с объектом. Затем, ЦП переходит к этапу 1422, описанному ниже.
[0180] Когда ЦП на этапе 1406 определяет, что условие пересечения не установлено, когда ЦП на этапе 1412 определяет, что условие длины не установлено, или когда ЦП на этапе 1416 определяет, что условие периода времени не установлено, ЦП определяет, что объект, выбранный на этапе 1404, не приближается ни с левой стороны, ни с правой стороны базового транспортного средства 100 (другими словами, ЦП определяет, что выбранный объект имеет нулевую вероятность пересечения каждого ожидаемого пути в пределах порогового периода времени). ЦП выполняет определение "Нет" на этапе 1406, этапе 1412 или этапе 1416 и переходит к этапу 1420 ниже.
[0181] Этап 1420: ЦП устанавливает значение флага привлечения внимания объекта, выбранного на этапе 1404, на 0, и сохраняет установленное значение в ОЗУ ЭБУ 10 содействия при вождении в связи с объектом. Затем, ЦП переходит к этапу 1422 ниже.
[0182] На этапе 1422, ЦП определяет, выполнены ли процессы из этапа 1404, описанные выше, для всех объектов, содержащих информацию об объекте, полученную на этапе 1308 по фиг. 13. Когда ЦП определяет, что процессы, описанные выше, еще не выполнены для всех объектов, ЦП выполняет определение "Нет" на этапе 1422, возвращается к этапу 1404 и повторяет процессы из этапа 1404 для оставшихся объектов. Когда ЦП определяет, что процессы, описанные выше, выполнены для всех объектов, ЦП выполняет определение "Да" на этапе 1422 и переходит к этапу 1312 по фиг. 13 через этап 1424.
[0183] Далее будет описан процесс этапа 1312 по фиг. 13. В примере по фиг. 13, ЦП на этапе 1312 выполняет программу, проиллюстрированную на блок-схеме последовательности операций по фиг. 15. Когда ЦП переходит к этапу 1312, ЦП начинает с процесса этапа 1500 по фиг. 15 и выполняет процесс этапа 1502, описанный ниже.
[0184] Этап 1502: ЦП устанавливает область Rs(n) одинакового направления и область Ro(n) противоположного направления на координатной плоскости xy, как описано выше. Когда ЦП завершает процесс этапа 1502, ЦП переходит к этапу 1504.
[0185] Процессы или определения этапов с 1504 по 1512 по фиг. 15, соответственно, совпадают с процессами или определениями этапов с 1004 по 1012 по фиг. 10. Определения этапов с 1516 по 1520 по фиг. 15, соответственно, совпадают с определениями этапов с 1020 по 1024 по фиг. 10. Следовательно, этапы с 1516 по 1520 не будут описаны.
[0186] Когда ЦП выполняет определение "Да" на этапе 1512 (то есть, когда ЦП определяет, что условие угла одинакового направления установлено), ЦП переходит к этапу 1514 ниже.
[0187] Этап 1514: ЦП увеличивает значение счетчика ks одинакового направления на один и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1524, описанному ниже.
[0188] Когда ЦП на этапе 1508 определяет, что условие области одинакового направления не установлено, ЦП на этапе 1510 определяет, что условие скорости одинакового направления не установлено, или когда ЦП на этапе 1512 определяет, что условие угла одинакового направления не установлено, ЦП выполняет определение "Нет" на этапе 1508, этапе 1510 или этапе 1512 и переходит к этапу 1524, описанному ниже.
[0189] Когда ЦП выполняет определение "Да" на этапе 1520 (то есть, когда ЦП определяет, что условие угла противоположного направления установлено), ЦП переходит к этапу 1522 ниже.
[0190] Этап 1522: ЦП увеличивает значение счетчика ko противоположного направления на один и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1524, описанному ниже.
[0191] Когда ЦП на этапе 1516 определяет, что условие области противоположного направления не установлено, ЦП на этапе 1518 определяет, что условие скорости противоположного направления не установлено, или когда ЦП на этапе 1520 определяет, что условие угла противоположного направления не установлено, ЦП выполняет определение "Нет" на этапе 1516, этапе 1518 или этапе 1520 и переходит к этапу 1524 ниже.
[0192] На этапе 1524, ЦП определяет, выполнены ли процессы из этапа 1504, описанные выше, для всех объектов, содержащих информацию об объекте, полученную на этапе 1308 по фиг. 13. Когда ЦП определяет, что процессы, описанные выше, еще не выполнены для всех объектов, ЦП выполняет определение "Нет" на этапе 1524, возвращается к этапу 1504 и повторяет процессы из этапа 1504 для оставшихся объектов. Когда ЦП определяет, что процессы, описанные выше, выполнены для всех объектов, ЦП выполняет определение "Да" на этапе 1524 и выполняет процессы этапа 1526 и этапа 1528 ниже по порядку.
[0193] Этап 1526: ЦП рассчитывает количество объектов (то есть, количество объектов в области, удовлетворяющих условиям на n-ом цикле=ks+ko) из суммы значения счетчика ks одинакового направления на этапе 1514 и значения счетчика ko противоположного направления на этапе 1522, и сохраняет количество объектов в ОЗУ ЭБУ 10 содействия при вождении.
Этап 1528: ЦП рассчитывает общее количество объектов посредством суммирования количества объектов на n-ом цикле, рассчитанного на этапе 1526, с суммой последних полученных (M-1) количеств объектов (то есть, суммой количеств объектов с (n-4)-ого цикла по (n-1)-ый цикл), и сохраняет общее количество объектов в ОЗУ ЭБУ 10 содействия при вождении.
[0194] Затем, ЦП переходит к этапу 1530 и определяет, является ли общее количество объектов, рассчитанное на этапе 1528, больше или равным пороговому значению. Когда общее количество объектов больше или равно пороговому значению, ЦП определяет, что имеет место ситуация движения транспорта. В таком случае, ЦП выполняет определение "Да" на этапе 1530 и выполняет процесс этапа 1532 ниже.
[0195] Этап 1532: ЦП устанавливает значение флага ситуации движения транспорта на 1 и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1314 по фиг. 13 через этап 1534.
Когда общее количество объектов меньше порогового значения, ЦП определяет, что ситуация движения транспорта не имеет место. В таком случае, ЦП выполняет определение "Нет" на этапе 1530 и выполняет процесс этапа 1536 ниже.
[0197] Этап 1536: ЦП устанавливает значение флага ситуации движения транспорта на 0 и сохраняет значение в ОЗУ ЭБУ 10 содействия при вождении. Затем, ЦП переходит к этапу 1314 по фиг. 13 через этап 1534.
[0198] На этапе 1314 по фиг. 13, ЦП выбирает любой объект, содержащий информацию об объекте, полученную на этапе 1308, и определяет, равняется ли 0 значение флага привлечения внимания выбранного объекта. Когда значение флага привлечения внимания равно 0, ЦП выполняет определение "Да" на этапе 1314 (то есть, определяет, что объект не является целевым объектом) независимо от значений флага ситуации движения транспорта, и выполняет процесс этапа 1316 ниже. ЦП выполняет процессы этапов с 1314 по 1322 для каждого выбранного объекта (ссылка на этап 1324, описанный ниже).
[0199] Этап 1316: ЦП не генерирует сигнал запроса для выбранного объекта. Таким образом, внимание не привлекается к выбранному объекту посредством устройства 21 отображения. Затем, ЦП переходит к этапу 1324, описанному ниже.
[0200] Когда значение флага привлечения внимания выбранного объекта равняется 1, ЦП выполняет определение "Нет" на этапе 1314 и переходит к этапу 1318 ниже.
[0201] На этапе 1318, ЦП определяет, равняется ли 1 значение флага ситуации движения транспорта. Когда значение флага ситуации движения транспорта равно 1 (то есть, когда значение флага привлечения внимания выбранного объекта равно 1 и значение флага ситуации движения транспорта выбранного объекта равно 1), ЦП выполняет определение "Да" на этапе 1318 (то есть, определяет, что, несмотря на то, что выбранный объект является целевым объектом, ситуация движения транспорта препятствует движению целевого объекта, и, следовательно, целевой объект имеет очень низкую вероятность пересечения левостороннего ожидаемого пути и/или правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), и переходит к этапу 1320 ниже.
[0202] Этап 1320: ЦП запрещает генерирование сигнала запроса для выбранного объекта. Таким образом, привлечение внимания к выбранному объекту посредством устройства 21 отображения запрещается. Затем, ЦП переходит к этапу 1324, описанному ниже.
[0203] Когда значение флага ситуации движения транспорта равно 0 (то есть, когда значение флага привлечения внимания выбранного объекта равно 1 и значение флага ситуации движения транспорта выбранного объекта равно 0), ЦП выполняет определение "Нет" на этапе 1318 (то есть, определяет, что выбранный объект является целевым объектом, и целевой объект движется без препятствия его движению, так как ситуация движения транспорта, препятствующая движению целевого объекта, не имеет место, и, следовательно, целевой объект имеет вероятность пересечения левостороннего ожидаемого пути и/или правостороннего ожидаемого пути базового транспортного средства 100 в пределах порогового периода времени), и переходит к этапу 1322 ниже.
[0204] Этап 1322: ЦП генерирует сигнал запроса для выбранного объекта и передает сигнал запроса на ЭБУ 20 отображения. Следовательно, внимание привлекается к выбранному объекту посредством устройства 21 отображения. Затем, ЦП переходит к этапу 1324 ниже.
[0205] На этапе 1324, ЦП определяет, выполнены ли процессы из этапа 1314, описанные выше, для всех объектов, содержащих информацию об объекте, полученную на этапе 1308. Когда процессы, описанные выше, еще не выполнены для всех объектов, ЦП выполняет определение "Нет" на этапе 1324, возвращается к этапу 1314 и повторяет процессы из этапа 1314 для оставшихся объектов. Когда, например, любой процесс этапа 1316 и этапа 1320 выполняется для объекта B, отличного от объекта A, во время привлечения внимания к объекту A посредством процесса этапа 1322, состояние привлечения внимания к объекту A продолжается. Когда, например, процесс этапа 1322 выполняется для объекта B, отличного от объекта A, во время привлечения внимания к объекту A посредством процесса этапа 1322, внимание привлекается как к объекту A, так и к объекту B. То есть, определение того, стоит ли привлекать внимание, выполняется для каждого объекта. Когда процессы, описанные выше, выполнены для всех объектов, ЦП выполняет определение "Да" на этапе 1324 и выполняет процессы этапа 1326 и этапа 1328 ниже по порядку.
[0206] Этап 1326: ЦП инициализирует (устанавливает на 0) значение флага привлечения внимания для каждого объекта. ЦП инициализирует (устанавливает на 0) значение флага ситуации движения транспорта. Значение флага привлечения внимания и значение флага ситуации движения транспорта инициализируются ЦП, когда переключатель двигателя переводят из состояния ВЫКЛ в состояние ВКЛ.
Этап 1328: ЦП инициализирует (устанавливает на 0) значения счетчика ks одинакового направления и счетчика ko противоположного направления. Затем, ЦП переходит к этапу 1330 и временно завершает текущую программу. Значения счетчиков инициализируются ЦП, когда переключатель двигателя переводят из состояния ВЫКЛ в состояние ВКЛ.
Второе осуществленное устройство также может существенно снизить вероятность ненужного привлечения внимания, и может более надлежащим образом привлекать внимание водителя базового транспортного средства 100.
Пример изменения
[0208] Далее будет описано устройство содействия при вождении согласно примеру изменения второго варианта осуществления (далее в материалах настоящей заявки, указываемое ссылкой, как "второе измененное устройство"). Во втором измененном устройстве, способ расчета для извлечения объекта, движущегося приблизительно параллельно базовому транспортному средству 100, из объектов, присутствующих вокруг базового транспортного средства 100, отличается от второго осуществленного устройства. То есть, второе измененное устройство, сначала, классифицирует все объекты, присутствующие вокруг базового транспортного средства 100, в качестве любого из объекта одинакового направления и объекта противоположного направления, для удобства, на основании результата определения того, является ли угловой сдвиг θ(n) меньше или равным первому пороговому значению (= 90°) (ссылка на этап 1506 по фиг. 15). Второе осуществленное устройство извлекает объект одинакового направления, удовлетворяющий условию угла одинакового направления (0° ≤ θ(n) ≤ 20°), в качестве "объекта одинакового направления в области, удовлетворяющего условиям" (ссылка на этап 1512 по фиг. 15). Второе осуществленное устройство извлекает объект противоположного направления, удовлетворяющий условию угла противоположного направления (160° ≤ θ(n) ≤ 180°), в качестве "объекта противоположного направления в области, удовлетворяющего условиям" (ссылка на этап 1520 по фиг. 15).
[0209] Второе измененное устройство определяет, для всех объектов, присутствующих вокруг базового транспортного средства 100, является ли угловой сдвиг θ(n) объекта меньше или равным четвертому угловому пороговому значению (20° в настоящем примере). Четвертое угловое пороговое значение установлено на более низкое значение, чем первое угловое пороговое значение (90° в настоящем примере). Когда второе измененное устройство определяет, что угловой сдвиг θ(n) объекта меньше или равен четвертому угловому пороговому значению (то есть, когда второе измененное устройство определяет, что 0° ≤ θ(n) ≤ 20° удовлетворено), второе измененное устройство определяет, что объект является объектом одинакового направления, направление TDo(n) движения которого приблизительно параллельно направлению TDv(n) движения базового транспортного средства 100, и извлекает объект в качестве объекта одинакового направления. Когда второе измененное устройство определяет, что угловой сдвиг θ(n) объекта больше четвертого углового порогового значения (то есть, когда второе измененное устройство определяет, что 20° ≤ θ(n) ≤ 180° удовлетворено), второе измененное устройство определяет, является ли угловой сдвиг θ(n) объекта больше или равным пятому угловому пороговому значению (160° в настоящем примере). Пятое угловое пороговое значение установлено на более высокое значение, чем первое угловое значение. Когда второе измененное устройство определяет, что угловой сдвиг θ(n) объекта больше или равен пятому угловому пороговому значению (то есть, когда второе измененное устройство определяет, что 160° ≤ θ(n) ≤ 180° удовлетворено), второе измененное устройство определяет, что объект является объектом противоположного направления, направление TDo(n) движения которого приблизительно параллельно направлению TDv(n) движения базового транспортного средства 100, и извлекает объект в качестве объекта противоположного направления.
[0210] Когда второе измененное устройство извлекает объект в качестве объекта одинакового направления, второе измененное устройство определяет, удовлетворяет ли объект одинакового направления условию области одинакового направления и условию угла одинакового направления. Когда второе измененное устройство определяет, что оба условия удовлетворены, второе измененное устройство извлекает объект одинакового направления в качестве "объекта одинакового направления в области, удовлетворяющего условиям". Когда второе измененное устройство извлекает объект в качестве объекта противоположного направления, второе измененное устройство определяет, удовлетворяет ли объект противоположного направления условию области противоположного направления и условию угла противоположного направления. Когда второе измененное устройство определяет, что оба условия удовлетворены, второе измененное устройство извлекает объект противоположного направления в качестве "объекта противоположного направления в области, удовлетворяющего условиям".
[0211] То есть, второе измененное устройство не выполняет процесс классификации всех объектов, присутствующих вокруг базового транспортного средства 100, в качестве объектов одинакового направления или объектов противоположного направления, для удобства, и, сначала, выполняет определения, соответствующие этапу 1512 и этапу 1520 во втором осуществленном устройстве. После определений, второе измененное устройство выполняет определения, соответствующие этапу 1508 и этапу 1510, и определения, соответствующие этапу 1516 и этапу 1518 во втором осуществленном устройстве. Соответственно, период времени обработки может быть дополнительно сокращен по сравнению с конфигурацией, в которой объект, движущийся приблизительно параллельно базовому транспортному средству, извлекается после того, как все объекты, присутствующие вокруг базового транспортного средства 100, классифицируются в качестве объектов одинакового направления или объектов противоположного направления. Конфигурация настоящего измененного примера может быть применена к ЭБУ 10 содействия при вождении.
[0212] Несмотря на то, что устройство содействия при вождении согласно вариантам осуществления настоящего изобретения описано выше в материалах настоящей заявки, настоящее изобретение этим не ограничено. Различные изменения могут быть сделаны в степени, не выходящей из сущности настоящего изобретения.
[0213] Например, устройство содействия при вождении может включать в себя ЭБУ тревоги и устройство звуковой сигнализации вместо ЭБУ 20 отображения и устройства 21 отображения, или вдобавок к ЭБУ 20 отображения и устройству 21 отображения. В частности, ЭБУ тревоги соединен с ЭБУ 10 содействия при вождении через CAN 90 системы связи и датчиков с возможностью обмена данными. Устройство звуковой сигнализации соединено с ЭБУ тревоги. Когда ЭБУ тревоги принимает сигнал запроса с ЭБУ 10 содействия при вождении, ЭБУ тревоги передает командный сигнал на устройство звуковой сигнализации. Когда устройство звуковой сигнализации принимает командный сигнал с ЭБУ тревоги, устройство звуковой сигнализации подает сигнал тревоги, чтобы привлекать внимание водителя. Такая конфигурация также может достигать таких же результатов, как и осуществленные устройства и измененное устройство.
[0214] Устройство содействия при вождении может автоматически тормозить базовое транспортное средство 100 вместо привлечения внимания водителя базового транспортного средства 100 или вдобавок к привлечению внимания. В частности, устройство содействия при вождении включает в себя ЭБУ торможения и автоматический тормозной привод вместо ЭБУ 20 отображения и устройства 21 отображения. В частности, ЭБУ торможения соединен с ЭБУ 10 содействия при вождении через CAN 90 системы связи и датчиков с возможностью обмена данными. Автоматический тормозной привод соединен с ЭБУ торможения. Когда ЭБУ 10 содействия при вождении генерирует сигнал запроса привлечения внимания, ЭБУ 10 содействия при вождении генерирует сигнал запроса автоматического торможения, чтобы автоматически тормозить базовое транспортное средство 100, и передает сигнал запроса автоматического торможения на ЭБУ торможения. Когда ЭБУ торможения принимает сигнал запроса автоматического торможения с ЭБУ 10 содействия при вождении, ЭБУ торможения передает командный сигнал на автоматический тормозной привод. Когда автоматический тормозной привод принимает командный сигнал с ЭБУ торможения, автоматический тормозной привод выполняет автоматическое торможение посредством управления устройством торможения. Устройство содействия при вождении запрещает генерирование сигнала запроса автоматического торможения, когда устройство содействия при вождении определяет, что целевой объект присутствует и что ситуация движения транспорта имеет место. То есть, устройство содействия при вождении запрещает автоматическое торможение. Такая конфигурация также может существенно снизить вероятность ненужного автоматического торможения и может автоматически тормозить базовое транспортное средство 100 более надлежащим образом.
[0215] В зависимости от формы дороги, по которой движется базовое транспортное средство 100, как проиллюстрировано на фиг. 16, отражающий объект, такой как здание и вывеска, может присутствовать вдоль дороги. Электромагнитная волна, передаваемая с каждого датчика 14 радара, может быть отражена отражающим объектом и объектом H1, и может перемещаться вдоль пути, проиллюстрированного стрелкой из пунктирной линии. В таком случае, каждый датчик 14 радара принимает электромагнитную волну в виде отраженной волны (ссылка на стрелку из сплошной линии), отраженной в положении, проиллюстрированном пунктирной линией H2. Далее в материалах настоящей заявки, такая отраженная волна будет указана ссылкой, как "призрачная волна". То есть, каждый датчик 14 радара принимает две электромагнитные волны, "обычную отраженную волну (не проиллюстрирована), которая не является призрачной волной", отраженную от объекта, и "призрачную волну". Таким образом, устройство содействия при вождении получает две части информации об объекте, а именно, информацию об объекте существующего объекта (объекта H1), и информацию об объекте несуществующего объекта (объекта, проиллюстрированного пунктирной линией H2; далее в материалах настоящей заявки, указываемого ссылкой, как "призрачный объект"). Устройство содействия при вождении по предшествующему уровню техники выполняет определение целевого объекта на основании информации об объекте призрачного объекта. Соответственно, когда устройство содействия при вождении по предшествующему уровню техники определяет, что призрачный объект является целевым объектом, привлечение внимания или автоматическое торможение выполняется для несуществующего объекта, и возникает проблема, состоящая в выполнении ненужной содействия при вождении. Устройство содействия при вождении, раскрытое в настоящей спецификации, выполняет процесс определения ситуации движения транспорта вместе с процессом определения целевого объекта. Когда устройство содействия при вождении определяет, что имеет место ситуация движения транспорта (то есть, когда общее количество объектов больше или равно пороговому значению), устройство содействия при вождении запрещает привлечение внимания или автоматическое торможение, даже когда устройство содействия при вождении определяет, что присутствует целевой объект. В ситуации, в которой устройство содействия при вождении определяет, что призрачный объект (H2) является целевым объектом, существующий объект (H1) имеет очень высокую вероятность движения приблизительно параллельно базовому транспортному средству 100 (ссылка на фиг. 16). Таким образом, когда устройство содействия при вождении определяет, что существующий объект удовлетворяет каждому условию (в примере по фиг. 16, когда устройство содействия при вождении определяет, что объект H1 удовлетворяет условию области противоположного направления, условию скорости противоположного направления и условию угла противоположного направления), существующий объект рассматривается, как "объект в области, удовлетворяющий условиям", и общее количество объектов в предопределенном периоде составляет по меньшей мере один. Таким образом, посредством установки порогового значения на "1", общее количество объектов больше или равно пороговому значению, и устройство содействия при вождении определяет, что имеет место ситуация движения транспорта. Следовательно, устройство содействия при вождении запрещает привлечение внимания или автоматическое торможение для призрачного объекта и может существенно снизить вероятность ненужного привлечения внимания или автоматического торможения для призрачного объекта. То есть, конфигурации вариантов осуществления и примера изменения могут быть применены к призрачному объекту посредством установки порогового значения на "1". Соответственно, осуществленные устройства и измененное устройство могут существенно снизить вероятность выполнения "ненужного привлечения внимания или автоматического торможения, вызванного призрачным объектом" не только когда базового транспортное средство 100 движется рядом с перекрестком, но также когда базового транспортное средство 100 движется по дороге, не содержащей пересекающую дорогу (то есть, дорогу, которая пересекается с дорогой движения, по которой движется базовое транспортное средство 100).
[0216] Устройство содействия при вождении согласно другому примеру изменения настоящего изобретения может включать в себя камеры вместо датчиков 14 радара. Устройство содействия при вождении может рассчитывать общее количество объектов в предопределенном периоде посредством анализа данных изображения, принятых с каждой камеры, и может определять, имеет ли место ситуация движения транспорта. В качестве альтернативы, устройство содействия при вождении согласно другому примеру изменения настоящего изобретения может получать информацию о цвете сигнала регулирования движения из данных изображения сигнала регулирования движения на пересекающей дороге вместо расчета общего количества объектов, и может определять, что имеет место ситуация движения транспорта, когда информация о цвете указывает на красный.
[0217] Устройство содействия при вождении может получать информацию о цвете сигнала регулирования движения на пересекающей дороге посредством связи дороги с транспортным средством вместо расчета общего количества объектов, и может определять, что имеет место ситуация движения транспорта, когда информация о цвете указывает на красный.
[0218] Устройство содействия при вождении согласно другому примеру изменения первого варианта осуществления настоящего изобретения может приписывать точку (весовое значение) каждому "левостороннему объекту одинакового направления в области, удовлетворяющему условиям" в соответствии с "расстоянием между каждым объектом и базовым транспортным средством 100, скоростью каждого объекта и тому подобным", вместо подсчета количества "левосторонних объектов одинакового направления в области, удовлетворяющих условиям", и может использовать сумму точек в качестве "количества левосторонних объектов одинакового направления в области, удовлетворяющих условиям". То же самое применимо к количеству левосторонних объектов противоположного направления в области, удовлетворяющих условиям, количеству правосторонних объектов одинакового направления в области, удовлетворяющих условиям, и количеству правосторонних объектов противоположного направления в области, удовлетворяющих условиям. В таком случае, приписанная точка возрастает с повышением степени препятствия движению целевого объекта. Схожим образом, сумма приписанных точек может использоваться в качестве количества объектов в области, удовлетворяющих условиям на n-ом цикле во втором варианте осуществления.
[0219] Предопределенный период не ограничен периодом, соответствующим множеству циклов, и может являться периодом, соответствующим одному циклу. Причина препятствия движению целевого объекта не ограничена объектом, движущимся перед целевым объектом в текущий момент времени. Например, целевой объект может замедляться из-за влияния объекта, ранее прошедшего перед целевым объектом (например, объекта E на фиг. 4), и не может пересекать ожидаемый путь базового транспортного средства 100 в пределах порогового периода времени. В таком случае, объект, ранее прошедший перед целевым объектом, также является причиной препятствия движению целевого объекта, и объект также вносит вклад в ситуацию движения транспорта. Соответственно, посредством установки предопределенного периода на период, соответствующий множеству циклов, и подсчета такого объекта в качестве "объекта в области, удовлетворяющего условиям", как в каждом варианте осуществления, точность определения того, имеет ли место ситуация движения транспорта, повышается. Следовательно, вероятность выполнения ненужного привлечения внимания или автоматического торможения может быть дополнительно уменьшена.
[0220] Угловой сдвиг может быть рассчитан посредством другого способа. Например, может быть установлена координатная ось, в которой начало координат закреплено в предопределенном положении. Угол направления TDv движения базового транспортного средства 100 с координатной осью в качестве отсчета и угол направления TDo движения объекта с координатной осью в качестве отсчета могут быть рассчитаны, и разница между обоими углами может быть рассчитана в качестве углового сдвига.
[0221] Размеры четырех областей (области Rsl, области Rsr, области Rol, и области Ror), установленных вокруг базового транспортного средства 100, могут отличаться друг от друга.
[0222] Базовое транспортное средство 100 может являться электрическим транспортным средством или гибридным автомобилем. Когда базовое транспортное средство 100 является электрическим транспортным средством, период, в течение которого приводной двигатель транспортного средства установлен в пригодное для движения состояние, соответствует периоду двигателя в состоянии ВКЛ в осуществленных устройствах и измененном устройстве. Когда базовое транспортное средство 100 является гибридным автомобилем, период времени, в течение которого приводной двигатель транспортного средства установлен в пригодное для движения состояние, и период, в течение которого двигатель находится в состоянии ВКЛ (период, в течение которого гибридная система запущена и работоспособна), соответствуют периоду двигателя в состоянии ВКЛ в осуществленных устройствах и измененном устройстве.
[0223] Устройство содействия при вождении может быть выполнено с возможностью оценивать один, или три, или более ожидаемых путей вместо оценки двух ожидаемых путей, левостороннего ожидаемого пути и правостороннего ожидаемого пути. Ожидаемый путь не ограничен путями, по которым, как ожидается, пройдут левый конец OL и правый конец OR базового транспортного средства 100 (то есть, левосторонним ожидаемым путем и правосторонним ожидаемым путем). Например, ожидаемый путь может являться путем, по которому, как ожидается, пройдет положение O базового транспортного средства 100.
[0224] Устройство содействия при вождении может быть установлено не только в транспортное средство, движущееся по дороге с левосторонним движением, но и в транспортное средство, движущееся по дороге с правосторонним движением.
[0225] Устройство содействия при вождении может использовать значение, оцениваемое из горизонтального ускорения и скорости SPDv базового транспортного средства, в качестве скорости Y рыскания, или может использовать значение, оцениваемое из угла рулевого управления и скорости SPDv транспортного средства, в качестве скорости Y рыскания, вместо использования значения, детектируемого датчиком 13 скорости рыскания, в качестве скорости Y рыскания.
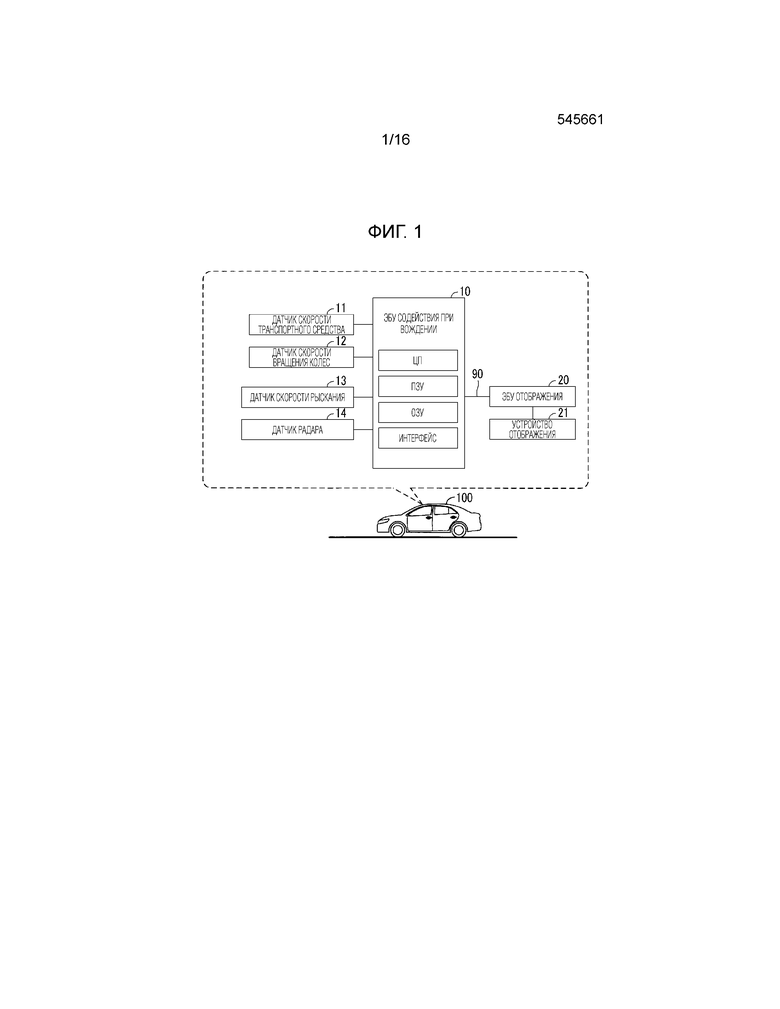

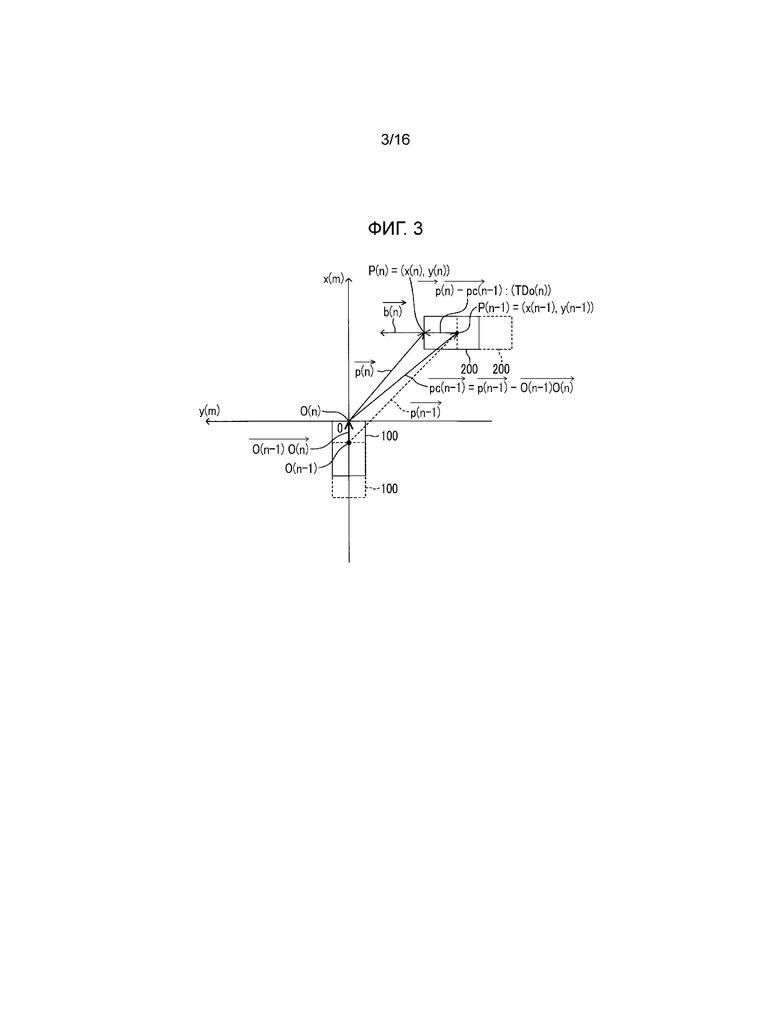

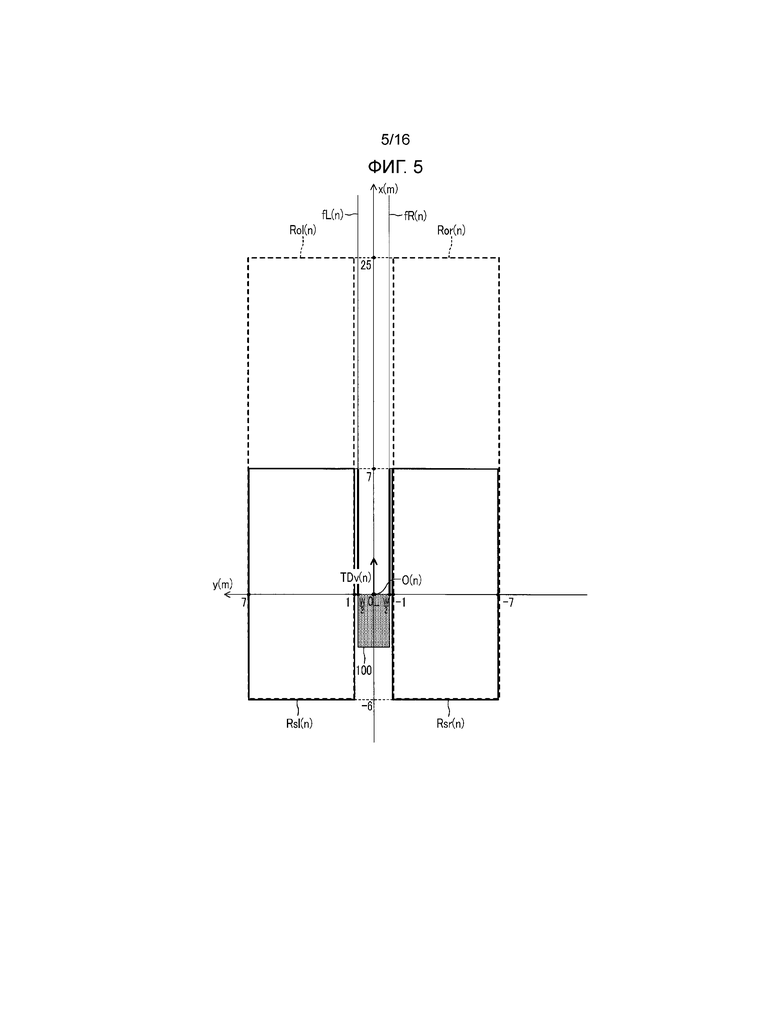
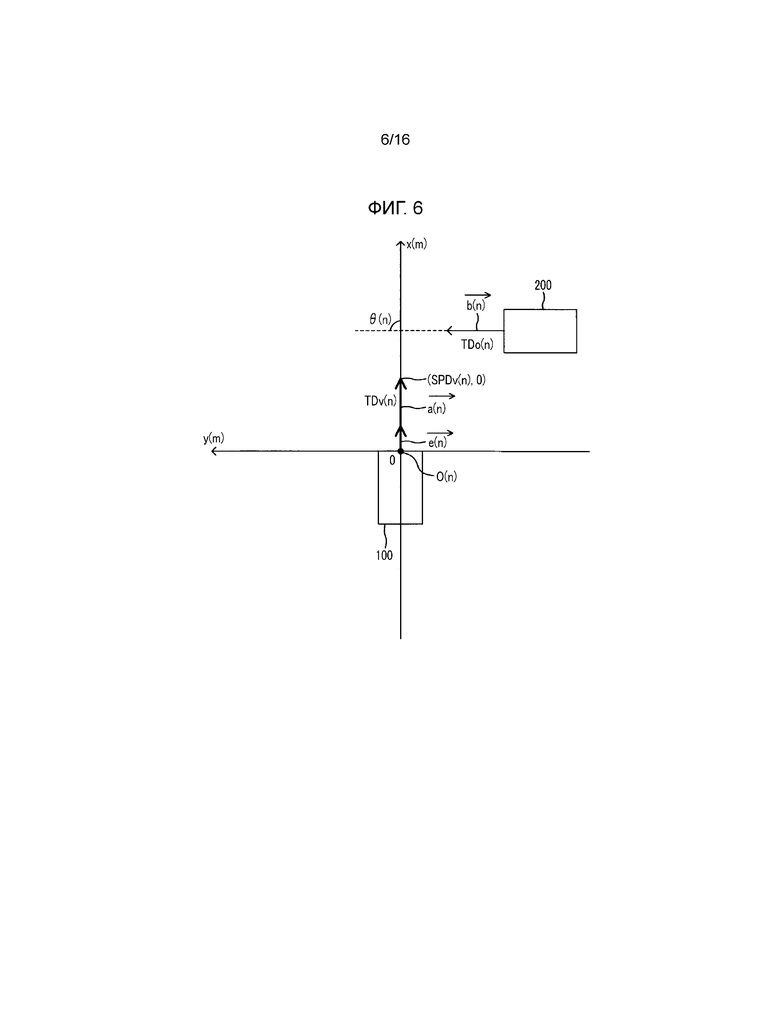
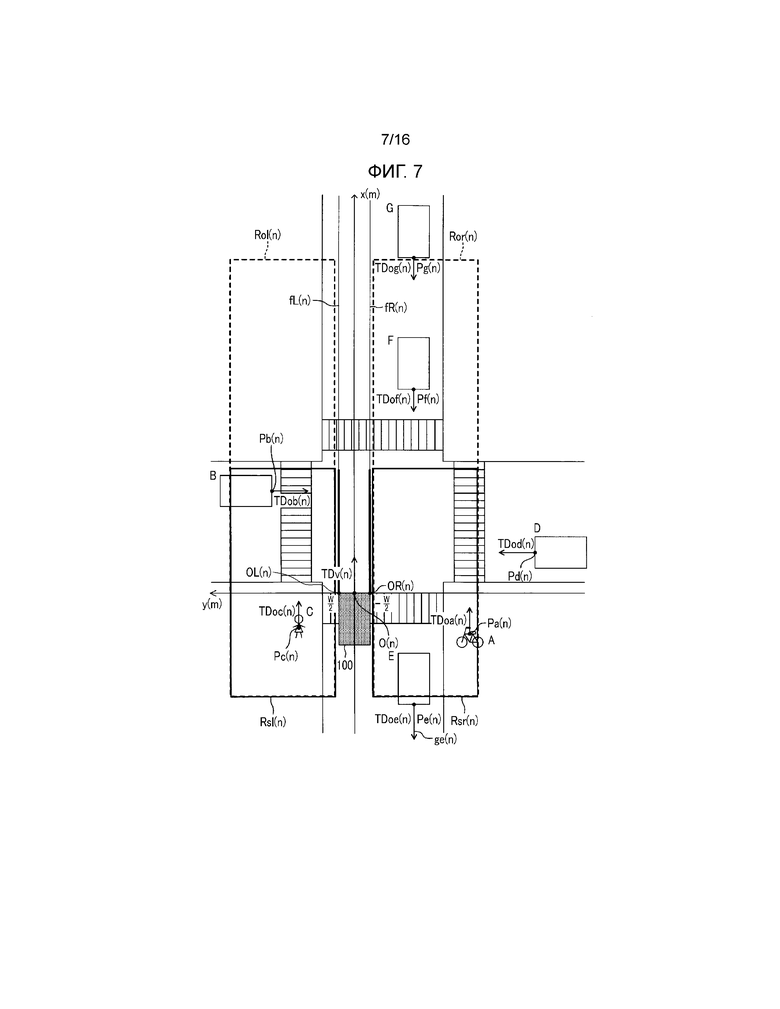
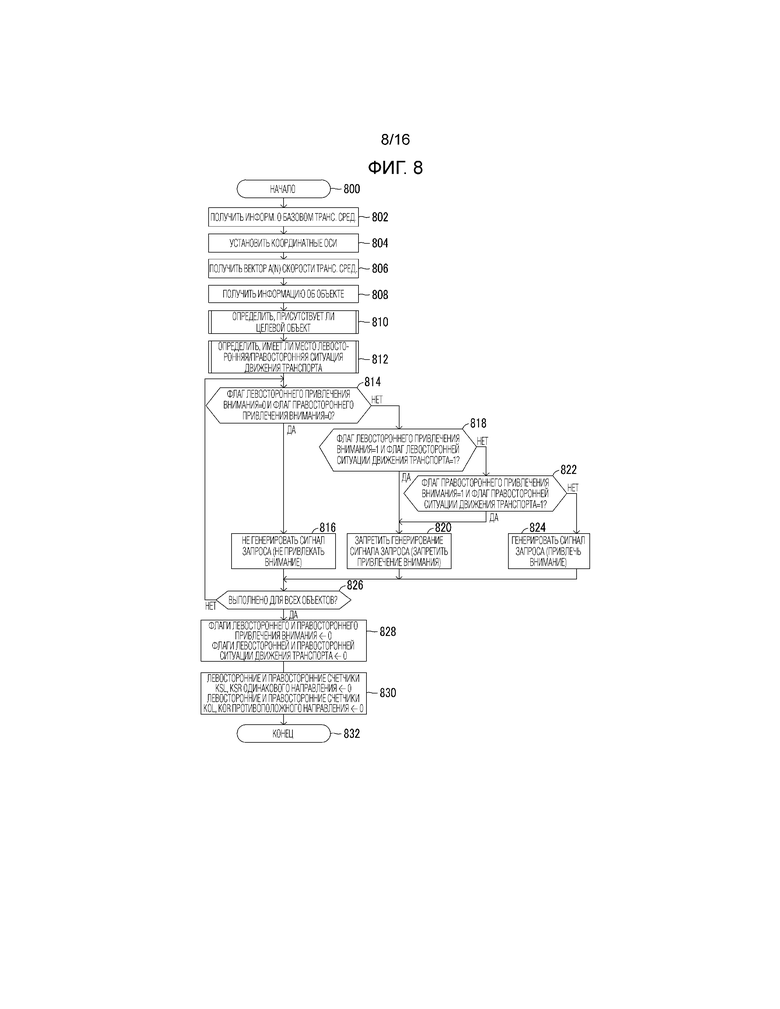
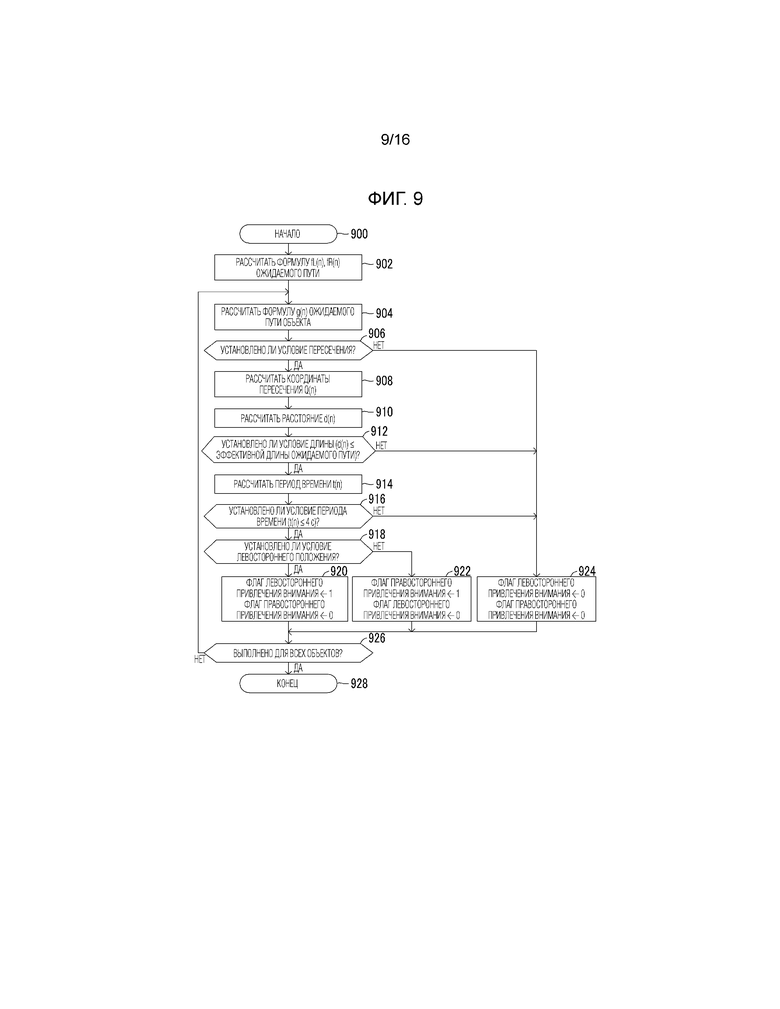
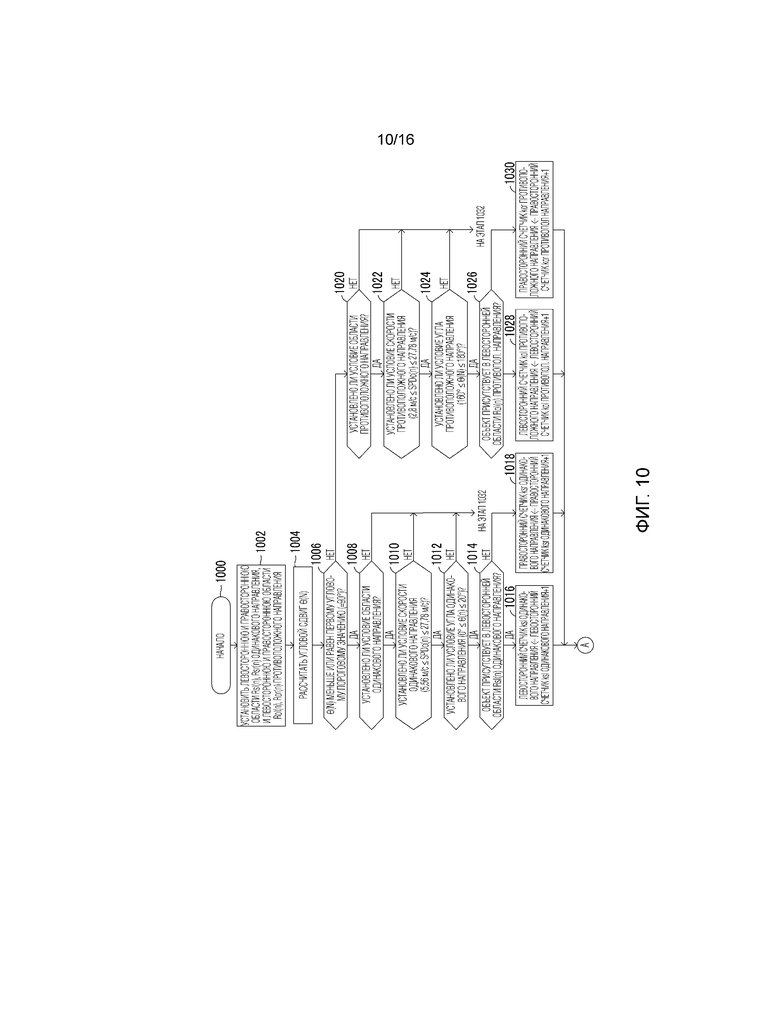
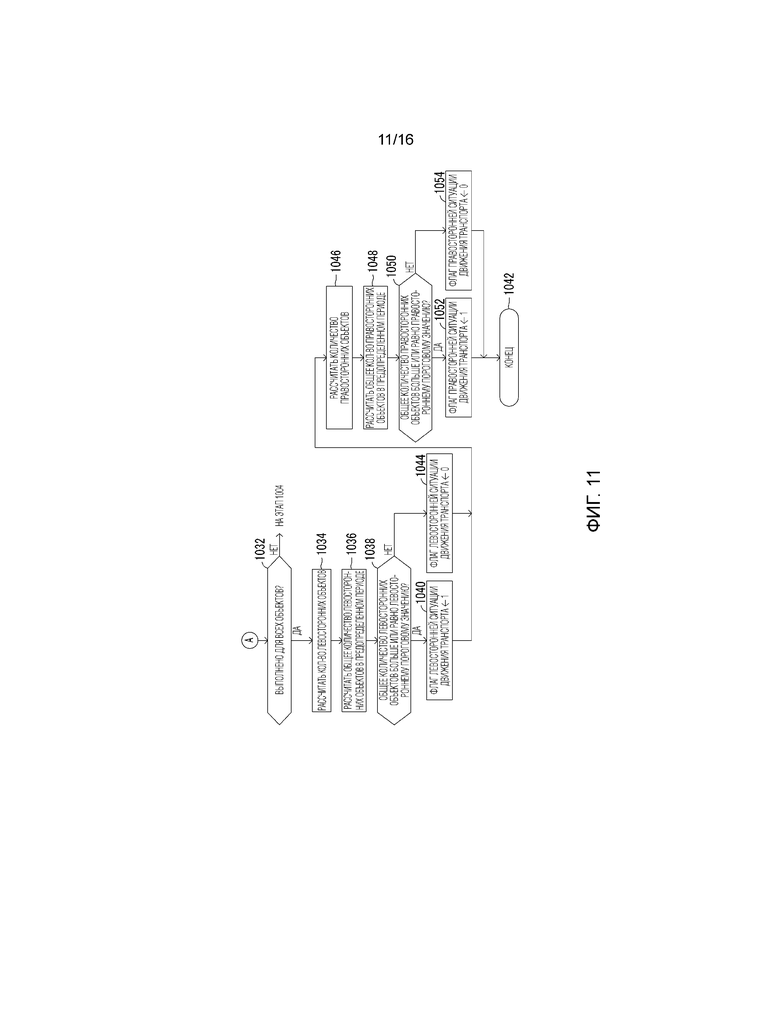




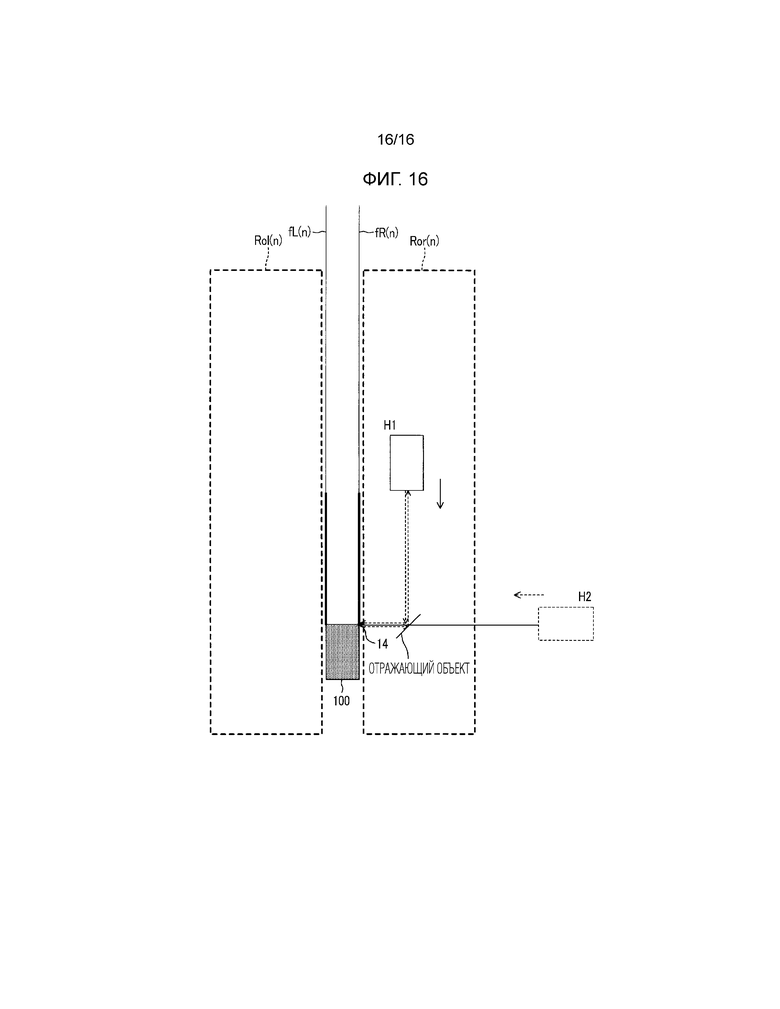
Изобретение относится к системам помощи при вождении. Устройство содействия при вождении содержит множество датчиков, которые установлены в транспортном средстве и выполнены с возможностью получать информацию о транспортном средстве и об объекте рядом с транспортным средством. Электронный блок управления выполнен с возможностью определять, движется ли транспортное средство прямо, присутствует ли объект, имеющий вероятность пересечения пути в пределах порогового периода времени, имеет ли место ситуация, которая будет препятствовать движению объекта, генерировать сигнал запроса содействия при вождении, выполнять содействие при вождении. Когда электронный блок управления определяет, что базовое транспортное средство движется прямо, производится оценка линейного пути конечной длины в направлении движения транспортного средства. Сигнал запроса содействия при вождении генерируют, когда определяют, что объект присутствует и что транспортное средство не движется, и запрещают генерирование сигнала, когда определяют, что объект присутствует и что транспортное средство движется. Достигается повышение безопасности управления транспортным средством. 3 з.п. ф-лы, 16 ил.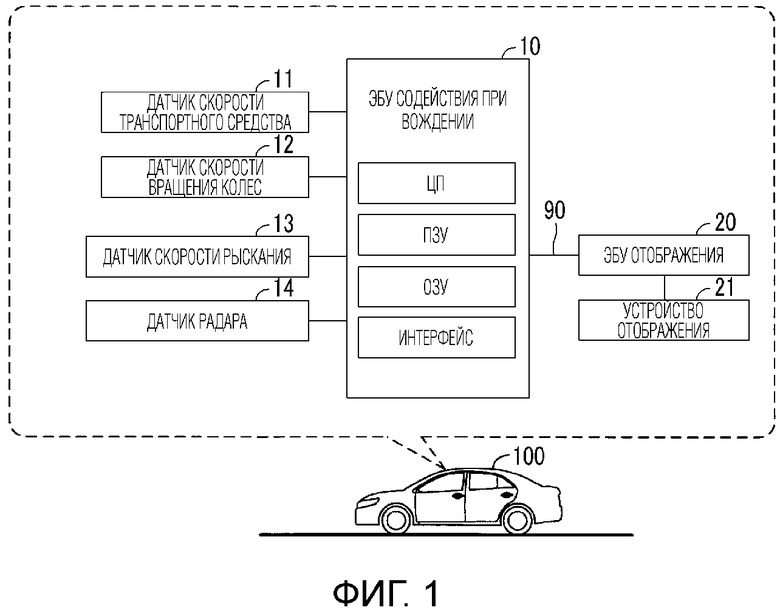
1. Устройство содействия при вождении, содержащее:
множество устройств датчиков, которые установлены в базовом транспортном средстве и выполнены с возможностью получать информацию о базовом транспортном средстве, включающую в себя параметр, представляющий состояние движения базового транспортного средства, и информацию об объекте, включающую в себя относительное положение объекта, присутствующего вокруг базового транспортного средства, относительно базового транспортного средства, направление движения объекта и скорость объекта; и
по меньшей мере один электронный блок управления, выполненный с возможностью
определять на основании информации о базовом транспортном средстве, движется ли базовое транспортное средство прямо,
когда электронный блок управления определяет, что базовое транспортное средство движется прямо, оценивать линейный путь конечной длины, продолжающийся в направлении движения базового транспортного средства от базового транспортного средства, как ожидаемый путь на основании информации о базовом транспортном средстве,
определять на основании информации об объекте, присутствует ли целевой объект, который является объектом, имеющим вероятность пересечения ожидаемого пути в пределах порогового периода времени,
определять, имеет ли место ситуация движения транспорта, которая, как оценивается, будет препятствовать движению целевого объекта,
генерировать сигнал запроса содействия при вождении, когда электронный блок управления определяет, что целевой объект присутствует и что ситуация движения транспорта не имеет место, и запрещать генерирование сигнала запроса содействия при вождении, когда электронный блок управления определяет, что целевой объект присутствует и что ситуация движения транспорта имеет место, и
выполнять, в ответ на генерирование сигнала запроса содействия при вождении, содействие при вождении, состоящее по меньшей мере в одном из содействия привлечения внимания и содействия автоматического торможения, при этом содействие привлечения внимания привлекает внимание водителя к целевому объекту, а содействие автоматического торможения автоматически тормозит базовое транспортное средство.
2. Устройство содействия при вождении по п. 1, в котором
электронный блок управления выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, объект одинакового направления, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в области одинакового направления, установленной заранее вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости одинакового направления, при этом угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления;
электронный блок управления выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, объект противоположного направления, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в области противоположного направления, установленной вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости противоположного направления, при этом угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления; и
электронный блок управления выполнен с возможностью определять, что ситуация движения транспорта имеет место, когда значение, основанное на сумме количества объектов одинакового направления и количества объектов противоположного направления, больше или равно предопределенному значению.
3. Устройство содействия при вождении по п. 1, в котором
электронный блок управления выполнен с возможностью определять, присутствует ли среди целевых объектов левый целевой объект, приближающийся к ожидаемому пути с левой стороны от направления движения базового транспортного средства;
электронный блок управления выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, левосторонний объект одинакового направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в левосторонней области одинакового направления, установленной с левой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости одинакового направления, при этом угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления;
электронный блок управления выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, левосторонний объект противоположного направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в левосторонней области противоположного направления, установленной с левой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости противоположного направления, при этом угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления;
электронный блок управления выполнен с возможностью определять, что левая ситуация движения транспорта, которая является ситуацией движения транспорта относительно левого целевого объекта, имеет место, когда значение, основанное на сумме количества левосторонних объектов одинакового направления в области и количества левосторонних объектов противоположного направления в области, больше или равно предопределенному значению; и
электронный блок управления выполнен с возможностью запрещать генерирование сигнала запроса содействия при вождении для левого целевого объекта, когда электронный блок управления определяет, что присутствует левый целевой объект и что левая ситуация движения транспорта имеет место.
4. Устройство содействия при вождении по п. 1, в котором
электронный блок управления выполнен с возможностью определять, присутствует ли среди целевых объектов правый целевой объект, приближающийся к ожидаемому пути с правой стороны от направления движения базового транспортного средства;
электронный блок управления выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, правосторонний объект одинакового направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в правосторонней области одинакового направления, установленной с правой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости одинакового направления, при этом угловой сдвиг меньше или равен предопределенному первому пороговому угловому сдвигу для определения одинакового направления;
электронный блок управления выполнен с возможностью извлекать, на основании информации о базовом транспортном средстве и информации об объекте, правосторонний объект противоположного направления в области, который является объектом, который движется с угловым сдвигом относительно направления движения базового транспортного средства, присутствует в правосторонней области противоположного направления, установленной с правой стороны от направления движения базового транспортного средства вокруг базового транспортного средства, и движется со скоростью в пределах предопределенного диапазона скорости противоположного направления, при этом угловой сдвиг больше или равен предопределенному второму пороговому угловому сдвигу для определения противоположного направления;
электронный блок управления выполнен с возможностью определять, что правая ситуация движения транспорта, которая является ситуацией движения транспорта относительно правого целевого объекта, имеет место, когда значение, основанное на сумме количества правосторонних объектов одинакового направления в области и количества правосторонних объектов противоположного направления в области, больше или равно предопределенному значению; и
электронный блок управления выполнен с возможностью запрещать генерирование сигнала запроса содействия при вождении для правого целевого объекта, когда электронный блок управления определяет, что присутствует правый целевой объект и что правая ситуация движения транспорта имеет место.
| US 7145441 B2, 05.12.2006 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ПРИБОР УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ПРОГРАММИРОВАНИЯ | 1994 |
|
RU2141125C1 |

