ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001]
Настоящее изобретение относится к способу исправления картографической информации, способу содействия вождению и устройству исправления картографической информации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002]
В PTL 1 раскрыто устройство обработки картографических данных, которое вычисляет данные для обновления из картографических данных, вычисленных на основе результата распознавания окружающей обстановки и состояния движения транспортного средства, и, когда ошибка между картографическими данными в базе данных карт и данными для обновления больше, чем значение критерия, обновляет картографические данные в базе данных карт.
СПИСОК ЦИТИРУЕМЫХ ДОКУМЕНТОВ
Патентная литература
[0003]
ПТЛ1: JP 2016-161456 А
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая проблема
[0004]
Известно управление содействием вождению, которое, используя картографическую информацию, представляющую положения границ полосы движения, создает маршрут движения на основе границ полосы движения в картографической информации и управляет поведением транспортного средства, таким как скорость транспортного средства и угол рулевого управления, таким образом, чтобы содействовать движению транспортного средства по созданному маршруту движения. Когда граница полосы движения в картографической информации исправляется во время выполнения такого управления содействием вождению, существует вероятность того, что возникнет резкое изменение поведения транспортного средства из-за изменения маршрута движения, установленного на основе границы полосы движения.
Задача настоящего изобретения состоит в том, чтобы предоставить способ исправления картографической информации, способный предотвращать изменение поведения транспортного средства, даже когда картографическая информация, включающая в себя информацию о положении границ полосы движения, используемая в управлении содействием вождению, исправляется во время выполнения управления содействием вождению.
РЕШЕНИЕ ПРОБЛЕМЫ
[0005]
Согласно одному аспекту настоящего изобретения предложен способ исправления картографической информации для исправления картографической информации, включающей в себя информацию линии границы полосы движения, причем способ включает в себя: обнаружение положения по отношению к собственному транспортному средству линии границы полосы движения, установленной в действительности на поверхности дороги, вокруг собственного транспортного средства; оценку собственного положения на карте собственного транспортного средства; и исправление, в зависимости от оцененного собственного положения и обнаруженного положения линии границы полосы движения, положения линии границы полосы движения, включенной в картографическую информацию, в первой области, сравнительно близкой к собственному транспортному средству, на большую величину поворотного исправления, чем во второй области, сравнительно дальней от собственного транспортного средства, и, во второй области, на большую величину сдвигового исправления, чем в первой области.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0006]
Согласно аспекту настоящего изобретения можно предотвратить изменение поведения транспортного средства, даже когда картографическая информация, включающая в себя информацию о положении границ полосы движения, исправляется во время выполнения управления содействием вождению.
Задача и преимущества изобретения будут реализованы и достигнуты посредством элементов и комбинаций, в частности указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не накладывают ограничений на изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007]
Фиг. 1 является схематическим изображением конфигурации устройства содействия вождению согласно вариантам осуществления;
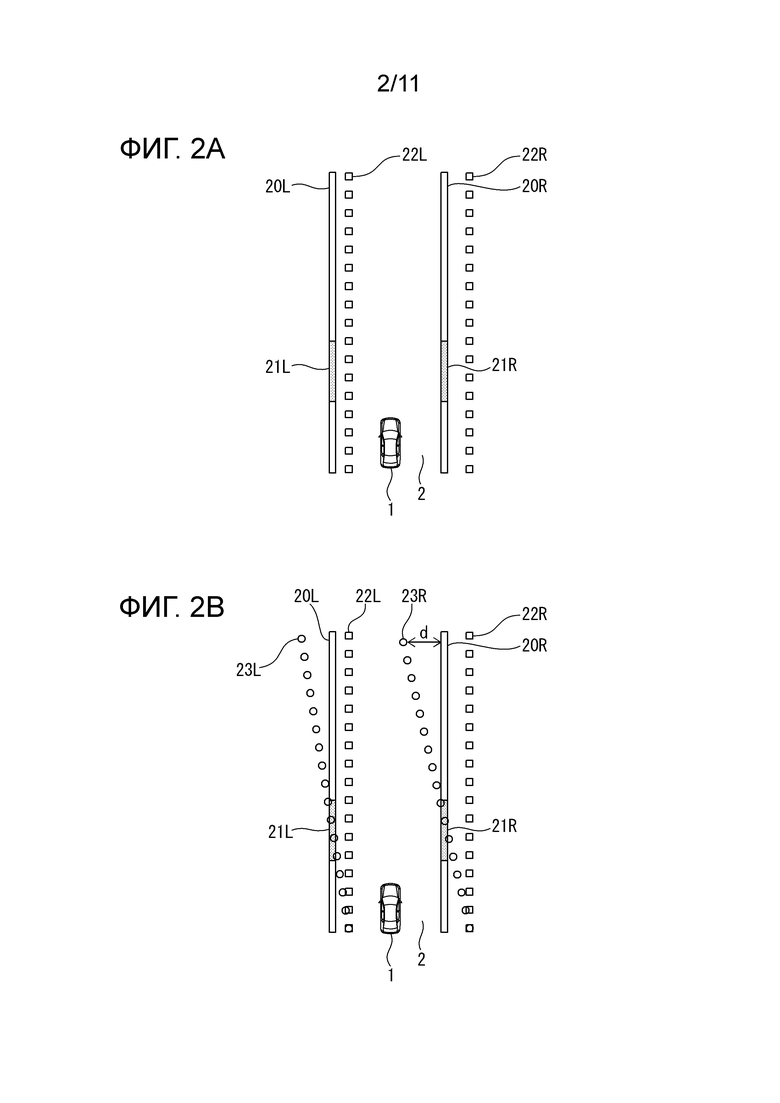
Фиг. 2A является пояснительной схемой примера различий между результатами обнаружения линий границы полосы движения и линий границы полосы движения в картографической информации;
Фиг. 2B является пояснительной схемой примера случая, когда картографическая информация исправляется только посредством поворота;
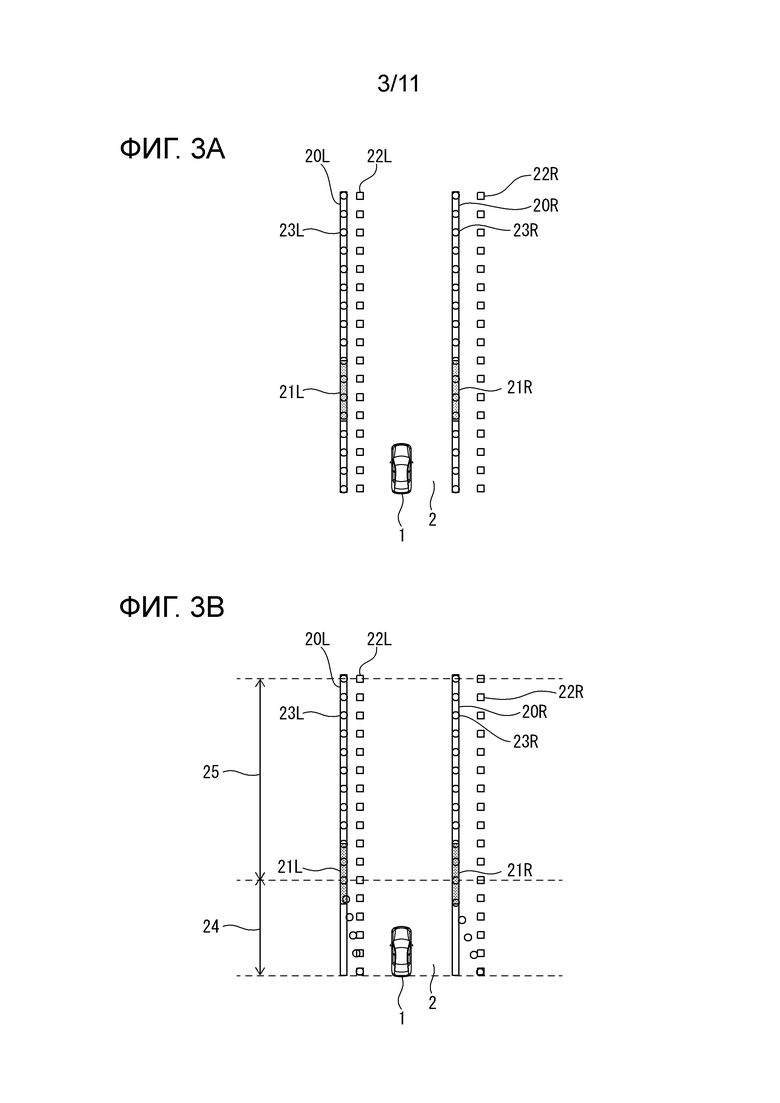
Фиг. 3А является пояснительной схемой примера случая, когда картографическая информация исправляется только посредством сдвига;
Фиг. 3B является пояснительной схемой примера способа исправления картографической информации согласно вариантам осуществления;
Фиг. 4 является блок-схемой, иллюстрирующей пример функциональной конфигурации устройства содействия вождению согласно вариантам осуществления;
Фиг. 5 является пояснительной схемой примера обработки соотнесения между линией границы полосы движения и картографической информацией;
Фиг. 6А является пояснительной схемой примера способа вычисления параметров сдвигового исправления;
Фиг. 6B является пояснительной схемой примера способа вычисления параметров поворотного исправления;
Фиг. 7 является пояснительной схемой примера способа исправления картографической информации согласно первому варианту осуществления;
Фиг. 8 является пояснительной схемой другого примера способа исправления картографической информации согласно первому варианту осуществления;
Фиг. 9 является блок-схемой последовательности операций примера способа исправления картографической информации согласно вариантам осуществления;
Фиг. 10А является пояснительной схемой примера способа исправления картографической информации согласно второму варианту осуществления;
Фиг. 10B является другой пояснительной схемой примера способа исправления картографической информации согласно второму варианту осуществления; и
Фиг. 11 является пояснительной схемой примера способа исправления картографической информации согласно третьему варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008]
(Первый вариант осуществления)
Конфигурация
Сейчас будет рассмотрена Фиг. 1. Собственное транспортное средство 1 включает в себя устройство 10 содействия вождению, выполненное с возможностью выполнения содействия вождению собственного транспортного средства 1. Содействие вождению, выполняемое устройством 10 содействия вождению, является управлением самостоятельным вождением, которое на основе, например, обстановки движения вокруг собственного транспортного средства 1 и картографической информации предписывает собственному транспортному средству 1 осуществлять самостоятельное вождение без участия водителя. Следует отметить, что, хотя устройство 10 содействия вождению может быть устройством, которое выполняет управление содействию вождению, чтобы содействовать вождению, выполняемому пассажиром, посредством управления некоторыми функциями устройств, задействованных в движении собственного транспортного средства 1, такими как рулевое управление, открытие акселератора и угол рулевого управления, на основе обстановки движения вокруг собственного транспортного средства 1 и картографической информации, следующее описание будет сделано в предположении, если не указано иное, что выполняется управление самостоятельным вождением, которое предписывает собственному транспортному средству 1 осуществлять самостоятельное вождение без участия водителя.
[0009]
Устройство 10 содействия вождению включает в себя датчики 11 объектов, датчики 12 транспортного средства, устройство 13 позиционирования, базу 14 данных карт, устройство 15 связи, контроллер 16 и исполнительные механизмы 17. На чертежах база данных карт обозначена как «DB карт».
Датчики 11 объектов включают в себя множество датчиков обнаружения объектов различных типов, которые установлены на собственном транспортном средстве 1 и обнаруживают объекты вокруг собственного транспортного средства 1, такие как лазерный радар, радар миллиметровых волн, камера и датчик определения и обнаружения дальности с помощью света или определения и обнаружения дальности с помощью лазерной визуализации (LIDAR).
[0010]
Датчики 12 транспортного средства установлены на собственном транспортном средстве 1 и обнаруживают различную информацию (сигналы транспортного средства), которая может быть получена от собственного транспортного средства 1. Датчики 12 транспортного средства включают в себя датчик скорости транспортного средства для обнаружения скорости движения (скорости транспортного средства) собственного транспортного средства 1, датчики скорости вращения колес для обнаружения скорости вращения соответствующих шин собственного транспортного средства 1, трехосный датчик ускорения (датчик G) для обнаружения ускорение (включая замедление) собственного транспортного средства 1 в трех осевых направлениях, датчик угла рулевого управления для обнаружения рулевого управления (включая угол поворота), гироскопический датчик для обнаружения угловой скорости, создаваемой собственным транспортным средством 1, датчик скорости рыскания для обнаружения скорости рыскания, датчик акселератора для обнаружения открытия акселератора собственного транспортного средства и датчик тормоза для обнаружения величины действия тормоза водителем.
[0011]
Устройство 13 позиционирования включает в себя приемник глобальной навигационной спутниковой системы (GNSS) и, принимая радиоволны от множества навигационных спутников, измеряет текущее положение собственного транспортного средства 1. Приемник GNSS может быть, например, приемником глобальной системы позиционирования (GPS) и т.п. Устройство 13 позиционирования может быть, например, инерциальным навигационным устройством.
База 14 данных карт может хранить картографическую информацию высокой четкости (далее просто называемую «картой высокой четкости»), которая подходит в качестве карты для самостоятельного вождения. Карта высокой четкости является картографическими данными более высокой точности, чем картографические данные для навигации (в дальнейшем просто именуемые как «навигационная карта»), и включает в себя информацию в единицах полос движения, которая является более подробной, чем информация в единицах дорог. В дальнейшем карта, представленная картографической информацией в базе 14 данных карт, иногда просто упоминается как «карта».
[0012]
Например, карта высокой четкости включает в себя в качестве информации в единицах полос движения информацию об узлах полосы движения, которые указывают реперные точки на реперной линии полосы движения (например, линия в центре полосы движения), и информацию о звеньях полос движения, которые указывают формы участков полосы движения между узлами полосы движения.
Информация о каждом узле полосы движения включает в себя идентификационный номер и координаты положения узла полосы движения, количество соединенных звеньев полосы движения и идентификационные номера соединенных звеньев полосы движения. Информация о каждом звене полосы движения включает в себя идентификационный номер звена полосы движения, тип полосы движения, ширину полосы движения, форму полосы движения, формы и типы линий границ полосы движения и форму реперной линии полосы движения.
[0013]
Линия границы полосы движения является разметкой дорожного покрытия, установленной в действительности на поверхности дороги для указания границы полосы движения, и примеры линии границы полосы движения включают в себя «центральную линию проезжей части», «линию границы полосы движения» и «линию обочины проезжей части».
Карта высокой четкости включает в себя в качестве информации о форме полосы движения информацию о положениях множества точек границы, образующих границу полосы движения, и форма линии границы полосы движения представлена набором таких точек границы. В качестве информации о форме линии границы полосы движения могут использоваться данные группы точек, представляющие положения на краю участка края в направлении ширины полосы движения линии полосы движения. Хотя в настоящем варианте осуществления предполагается, что форма линии границы полосы движения на карте высокой четкости представлена набором множества точек границы, образующих границу полосы движения, не ограничиваясь вышеизложенным, форма линия границы полосы движения может быть представлена линиями.
Карта высокой четкости также включает в себя типы и координаты положения наземных объектов, таких как светофор, стоп-линия, дорожный знак, здание, опора, бордюр и пешеходный переход, которые существуют на полосе движения или вблизи полосы движения, и информацию о наземных объектах, такую как идентификационные номера узлов полос движения и идентификационные номера звеньев полос движения, которые соответствуют координатам положения наземных объектов.
[0014]
Поскольку карта высокой четкости включает в себя информацию об узлах и информацию о звеньях в единицах полос движения, можно указать полосу движения, по которой собственное транспортное средство 1 движется по маршруту движения. Карта высокой четкости имеет систему координат, которая может представлять положения в направлении продолжения и направлении ширины каждой полосы движения. Карта высокой четкости имеет координаты (например, долготу, широту и высоту), которые могут представлять положения в трехмерном пространстве, а полосы движения и вышеописанные наземные объекты могут быть описаны как формы в трехмерном пространстве.
Устройство 15 связи осуществляет беспроводную связь с устройством связи, внешним по отношению к собственному транспортному средству 1. Способом связи, используемым устройством 15 связи, может быть, например, беспроводная связь через сеть мобильной телефонной связи общего пользования, связь между транспортными средствами, связь между транспортным средством и дорогой или спутниковая связь.
[0015]
Контроллер 16 является электронным блоком управления (ECU), который выполняет управление содействием вождению собственного транспортного средства 1. Контроллер 16 управляет исполнительными механизмами 17, выдавая сигналы управления исполнительным механизмам 17 на основе обстановки движения вокруг собственного транспортного средства 1, которая была обнаружена датчиками 11 объектов, и картографической информации в базе 14 данных карт, и, таким образом, выполняет управление самостоятельным вождением, которое предписывает собственному транспортному средству 1 двигаться самостоятельно.
В частности, контроллер 16 вычисляет текущее положение (собственное положение) собственного транспортного средства 1 на карте из текущего положения собственного транспортного средства 1, обнаруженного устройством 13 позиционирования, и также устанавливает траекторию движения (траекторию движения, представленную относительным положением по отношению к линии границы полосы движения) от собственного положения в положение на предварительно определенном расстоянии впереди, на основе собственного положения и линий границ полосы движения на карте. Контроллер 16 управляет, на основе собственного положения на карте и установленной траектории движения, собственным транспортным средством таким образом, чтобы собственное транспортное средство 1 двигалось по траектории движения, выдавая сигналы управления на исполнительные механизмы 17 таким образом, чтобы собственное положение совпадало с положением на траектории движения.
Кроме того, контроллер 16, как описано ниже, выполняет обработку исправления картографической информации для исправления линий границы полосы движения, включенных в картографическую информацию в базе 14 данных карт, на основе относительных положений линий границы полосы относительно собственного транспортного средства, которые обнаружены по результатам обнаружения датчиками объекта 11, и текущего положения (собственному положению) собственного транспортного средства 1. Подробности обработки исправления будут описаны позже.
Контроллер 16 включает в себя процессор 18 и периферийные компоненты, такие как запоминающее устройство 19. Процессор 18 может быть, например, центральным блоком управления (CPU) или микро блоком управления (MPU).
Запоминающее устройство 19 может включать в себя полупроводниковое запоминающее устройство, магнитное запоминающее устройство, оптическое запоминающее устройство и т.п. Запоминающее устройство 19 может включать в себя регистры, кэш-память и память, используемую в качестве основного запоминающего устройства, такую как постоянное запоминающее устройство (ROM) и запоминающее устройство с произвольным доступом (RAM).
[0016]
Функции контроллера 16, которые будут описаны ниже, могут быть реализованы, например, процессором 18, исполняющим компьютерные программы, хранящиеся в запоминающем устройстве 19.
Следует отметить, что контроллер 16 может быть образован специализированным аппаратным обеспечением для выполнения обработки информации, которая будет описана ниже.
Например, контроллер 16 может включать в себя функциональную логическую схему, реализованную в полупроводниковой интегральной схеме общего назначения. Например, контроллер 16 может включать в себя программируемое логическое устройство, такое как программируемая пользователем вентильная матрица (FPGA) и т.п.
[0017]
Исполнительные механизмы 17 управляют рулевым колесом, педалью акселератора и тормозным устройством собственного транспортного средства в соответствии с сигналами управления, выдаваемыми контроллером 16, и тем самым создают поведение собственного транспортного средства. Исполнительные механизмы 17 включают в себя исполнительный механизм рулевого управления, исполнительный механизм открытия акселератора и исполнительный механизм управления тормозом. Исполнительный механизм рулевого управления управляет направлением рулевого управления и величиной рулевого управления собственного транспортного средства 1. То есть исполнительный механизм рулевого управления управляет рулевым механизмом.
Исполнительный механизм открытия акселератора управляет открытием акселератора собственного автомобиля. То есть исполнительный механизм открытия акселератора управляет мощностью на выходе от силового блока собственного транспортного средства 1. Исполнительные механизмы управления тормозом управляют тормозным действием устройств торможения собственного транспортного средства 1.
[0018]
Далее будет описан пример обработки исправления картографической информации в базе 14 данных карт, выполняемой контроллером 16. Контроллер 16, выполняя управление самостоятельным вождением на основе картографической информации в базе 14 данных карт, исправляет линии границ полосы движения в картографической информации на основе результата обнаружения, в котором линии границы полосы движения были обнаружены датчиками 11 объектов.
Теперь будет описана Фиг. 2А. Ссылочное обозначение 20L указывает левостороннюю линию границы полосы движения, которая является линией границы полосы движения на левой стороне полосы 2 движения, по которой движется собственное транспортное средство 1, а ссылочное обозначение 20R указывает правостороннюю линию границы полосы движения, которая является линией границей полосы движения на правой стороне полосы 2 движения. Левосторонняя линия 20L границы полосы движения и правосторонняя линия 20R границы полосы движения иногда вместе называются «линиями 20 границы полосы движения».
[0019]
Заштрихованный участок 21L указывает левосторонний участок обнаружения, который является участком левосторонней линии 20L границы полосы движения, который был обнаружен датчиками 11 объектов, а заштрихованный участок 21R указывает правосторонний участок обнаружения, который является участком правосторонней линии 20R границы полосы движения, обнаруженным датчиками 11 объектов. Левосторонний участок 21L обнаружения и правосторонний участок 21R обнаружения иногда вместе упоминаются как "участки 21 обнаружения".
[0020]
Каждая из квадратных меток 22L и квадратных меток 22R указывает положение на карте множества точек границы, образующих одну из линий границ 2 полосы движения.
Каждая из квадратных меток 22L является левосторонней точкой границы, образующей линию границы полосы движения на левой стороне полосы 2 движения, и каждая из квадратных меток 22R является правосторонней точкой границы, образующей линию границы полосы движения на правой стороне полосы 2 движения. Левосторонние точки 22L границы и правосторонние точки 22R границы иногда вместе называются «точками 22 границы». Следует отметить, что, поскольку линия границы полосы движения образована множеством точек 22 границы, ее можно перефразировать так, что точка 22 границы является участком линии границы полосы движения. Поэтому в дальнейшем участок линии границы полосы движения иногда представляется как точка 22 границы.
[0021]
Контроллер 16, используя датчики 11 объектов, обнаруживает относительные положения участков 21 обнаружения по отношению к положению собственного транспортного средства 1.
Кроме того, контроллер 16, используя результат измерения устройством 13 позиционирования, одометрию с использованием результатов обнаружения от датчиков 12 транспортного средства и соотнесение карт между результатами обнаружения целевых объектов датчиками 11 объектов и базой 14 данных карт, оценивает собственное положение собственного транспортного средства 1 на карте.
[0022]
Контроллер 16 вычисляет, на основе относительных положений участков 21 обнаружения и собственного положения собственного транспортного средства 1, положения на карте участков 21 обнаружения.
В этом случае, вызванные ошибкой оценивания собственного положения собственного транспортного средства 1 и ошибкой самой картографической информации в базе 14 данных карт, иногда возникают различия между положениями участков 21 обнаружения и точек 22 границы, как показано на Фиг. 2А.
[0023]
Соответственно, контроллер 16 исправляет карту в базе 14 данных карт таким образом, чтобы положения на карте точек 22 границы совпадали с фактически обнаруженными положениями участков 21 обнаружения.
Исправление карты включает в себя исправление поворотного компонента и исправление сдвигового компонента. Фиг. 2B иллюстрирует случай, когда точки 22 границы исправляются посредством поворота.
Каждая из круглых меток 23L указывает левостороннюю исправленную точку границы, которая является точкой границы, в которую была исправлена левосторонняя точка 22L границы, и каждая круглая метка 23R указывает правостороннюю исправленную точку границы, которая является точкой границы, в которую исправлена правосторонняя точка 22R границы. Левосторонние исправленные точки 23L границы и правосторонние исправленные точки 23R границы иногда вместе называются «исправленными точками 23 границы».
[0024]
В примере на Фиг. 2B, точки 22 границы поворачиваются с использованием положения собственного транспортного средства 1 в качестве репера, и исправленные точки 23 границы вычисляются таким образом, что различия между исправленными точками 23 границы и участками 21 обнаружения минимизируются. В результате положения точек 22 границы исправляются таким образом, что границы полосы движения поворачиваются с использованием положения собственного транспортного средства 1 в качестве репера.
Таким образом, даже когда карта исправляется во время выполнения управления самостоятельным вождением, изменение поведения собственного транспортного средства 1 мало, поскольку требуется только отрегулировать ориентацию собственного транспортного средства 1 к изменению направления границ полосы движения.
Однако величина исправления становится больше по мере удаления точки 22 границы от собственного транспортного средства 1, и, вопреки ожиданиям, существует вероятность того, что величина d отклонения между исправленными точками 23 границы и фактическими линиями 20 границы полосы движения увеличивается.
[0025]
С другой стороны, Фиг. 3A иллюстрирует случай, когда точки 22 границы исправляются посредством сдвига. Контроллер 16 сдвигает точки 22 границы и вычисляет исправленные точки 23 границы таким образом, чтобы минимизировать различия между исправленными точками 23 границы и участками 21 обнаружения.
В этом случае положение внутри полосы движения собственного транспортного средства 1 подвергается мгновенным изменением за счет сдвига границ полосы движения. Таким образом, когда карта исправляется во время выполнения управления самостоятельным вождением, существует вероятность того, что для исправления смещения положения внутри полосы движения собственного транспортного средства 1 возникнет быстрое изменение поведения у собственного транспортного средства 1.
[0026]
Соответственно, контроллер 16 исправляет положения точек 22 границы на большую величину поворотного исправления в первой области 24, которая находится сравнительно близко к собственному транспортному средству 1, чем во второй области 25, которая находится сравнительно далеко от собственного транспортного средства 1, как показано на Фиг. 3B. Кроме того, контроллер 16 исправляет положения точек 22 границы на большую величину сдвигового исправления во второй области 25, чем в первой области 24.
[0027]
Вследствие этой конфигурации в первой области 24, которая сравнительно близка к собственному транспортному средству 1, величина сдвигового исправления становится малой. Таким образом, даже когда положения точек 22 границы на карте исправляются во время выполнения управления самостоятельным вождением, можно уменьшить изменение поведения собственного транспортного средства 1.
Кроме того, во второй области 25, которая находится сравнительно далеко от собственного транспортного средства 1, величина поворотного исправления становится малой. Таким образом, можно уменьшить величину d отклонения между исправленными точками 23 границы и фактическими линиями 20 границы полосы движения.
[0028]
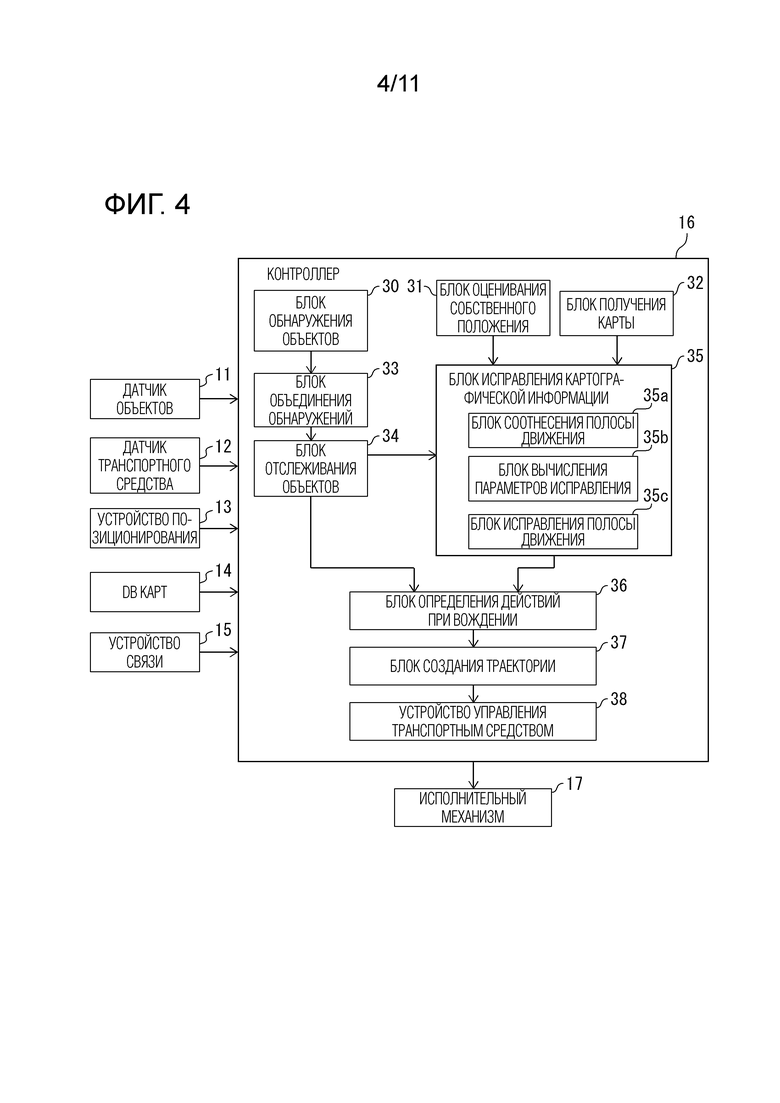
Далее будет подробно описана функциональная конфигурация контроллера 16 со ссылкой на Фиг. 4. Контроллер 16 включает в себя блок 30 обнаружения объектов, блок 31 оценивания собственного положения, блок 32 получения карты, блок 33 объединения обнаружений, блок 34 отслеживания объектов, блок 35 исправления картографической информации, блок 36 определения действий при вождении, блок 37 создания траектории и блок 38 управления транспортным средством.
[0029]
Блок 30 обнаружения объектов обнаруживает на основе сигналов обнаружения от датчиков 11 объектов положения, ориентации, размеры, скорости и т.п. объектов вокруг собственного транспортного средства 1, таких как транспортное средство, мотоцикл, пешеход и препятствие. Блок 30 обнаружения объектов выводит результаты обнаружения, представляющие двухмерные положения, ориентации, размеры, скорости и т.п. объектов, например, в виде сверху (также называемом видом в плане), в котором просматривается собственное транспортное средство 1 из воздуха.
[0030]
Блок 31 оценивания собственного положения измеряет на основе результата измерения устройством 13 позиционирования и одометрии с использованием результатов обнаружения от датчиков 12 транспортного средства собственное положение (положение на карте) собственного транспортного средства 1, то есть положение собственного транспортного средства 1 относительно предварительно определенной реперной точки, ориентации и скорости собственного транспортного средства 1.
Блок 32 получения карты получает картографическую информацию, указывающую структуру дороги, по которой должно двигаться собственное транспортное средство 1, из базы 14 данных карт. Блок 32 получения карты может получить картографическую информацию с внешнего сервера картографических данных через устройство 15 связи.
[0031]
Блок 33 объединения обнаружений объединяет множество результатов обнаружения, которые блок 30 обнаружения объектов, соответственно, получил от множества датчиков обнаружения объектов, и выводит один результат обнаружения в отношении каждого из соответствующих объектов.
В частности, блок 33 объединения обнаружений вычисляет исходя из поведения объектов, соответственно полученных от датчиков обнаружения объектов, наиболее разумное поведение объектов, которое минимизирует ошибку, с учетом характеристик ошибок соответствующих датчиков обнаружения объектов.
В частности, используя известную технологию объединения датчиков, блок 33 объединения обнаружений всесторонне оценивает результаты обнаружения, полученные множеством типов датчиков, и получает более точный результат обнаружения.
[0032]
Блок 34 отслеживания объектов отслеживает объекты, обнаруженные блоком 30 обнаружения объектов. В частности, на основе результатов обнаружения, объединенных блоком 33 объединения обнаружений, блок 34 отслеживания объектов выполняет проверку идентичности (ассоциативной связи) объектов в разное время на основе поведений объектов, выводимых в разное время, и предсказывает на основе ассоциативной связи поведение объектов, например, скорость.
[0033]
Блок 35 исправления картографической информации определяет степень достоверности результата обнаружения участков 21 обнаружения, который был обнаружен блоком 33 объединения обнаружений и блоком 34 отслеживания объектов.
Например, блок 35 исправления картографической информации может определить степень достоверности согласно отклонению между положениями участков 21 обнаружения, обнаруженными при предыдущем обнаружении, и положениями участков 21 обнаружения, обнаруженными при текущем обнаружении. Блок 35 исправления картографической информации также может определить степень достоверности согласно отклонению между положениями точек 22 границы в картографической информации и положениями участков 21 обнаружения. Например, блок 35 исправления картографической информации может определить, что степень достоверности является высокой, когда величина отклонения меньше порогового значения, и определить, что степень достоверности является низкой, когда величина отклонения больше или равна пороговому значению. Блок 35 исправления картографической информации также может определить степень достоверности согласно степени четкости участков 21 обнаружения, обнаруженных датчиками 11 объектов.
[0034]
При определении того, что степень достоверности результата обнаружения участками 21 обнаружения высока, блок 35 исправления картографической информации исправляет, на основе результата обнаружения участков 21 обнаружения и собственного положения собственного транспортного средства 1, оцененного блоком 31 оценивания собственного положения, картографическую информацию, полученную из базы 14 данных карт. Когда блок 32 получения карты получил картографическую информацию с внешнего сервера картографических данных, блок 35 исправления картографической информации исправляет картографическую информацию, полученную с внешнего сервера картографических данных.
Наоборот, при определении того, что степень достоверности результата обнаружения участков 21 обнаружения мала, блок 35 исправления картографической информации запрещает исправление картографической информации.
[0035]
Блок 35 исправления картографической информации включает в себя блок 35а соотнесения полосы движения, блок 35b вычисления параметров исправления и блок 35c исправления полосы движения.
Блок 35a соотнесения полосы движения идентифицирует положения на карте, соответствующие положениям точек, которые датчики 11 объектов обнаружили в качестве участков 21 обнаружения. Точки, которые датчики 11 объектов обнаружили в качестве участков 21 обнаружения, называются «точками обнаружения». Точки на карте, соответствующие точкам обнаружения, называются «соответствующими точками». Блок 35a соотнесения полосы движения независимо идентифицирует соответствующие точки относительно каждой из левостороннего участка 21L обнаружения и правостороннего участка 21R обнаружения.
[0036]
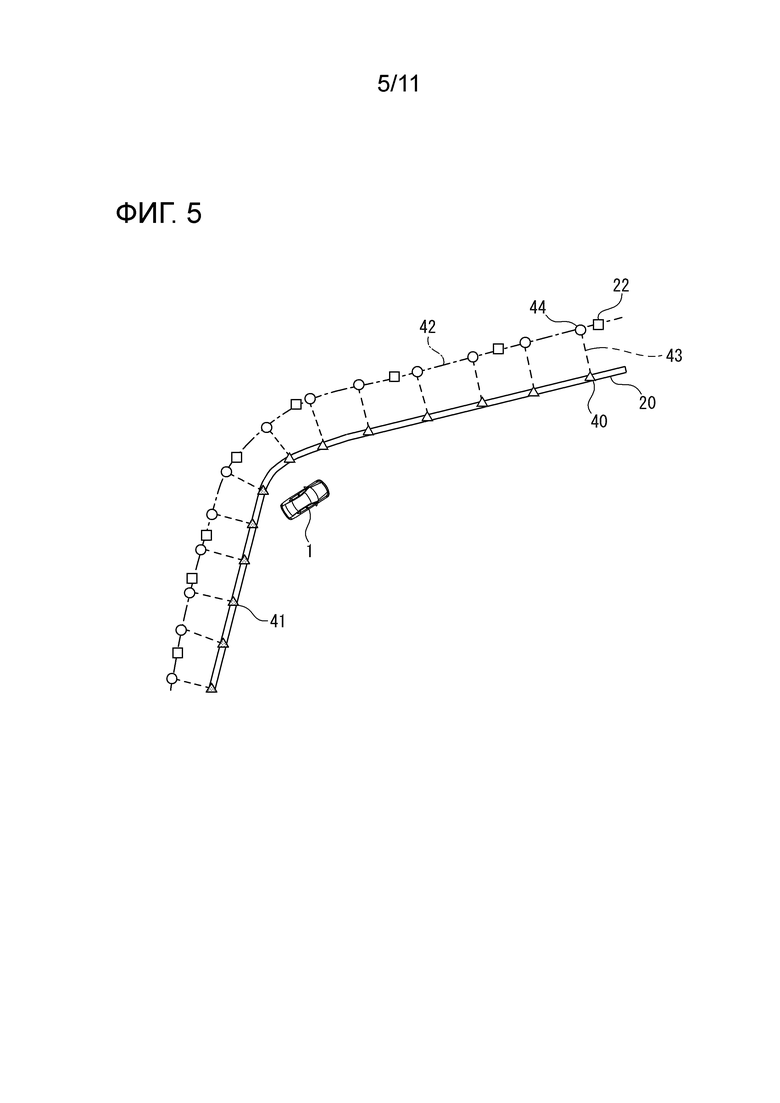
Теперь будет рассмотрена Фиг. 5. Белые треугольные метки 40 представляют собой точки обнаружения в участке 21 обнаружения, обнаруживаемые датчиками 11 объектов. Заштрихованные треугольные метки 41 представляют собой историю точек обнаружения, обнаруженных в прошлом. Чередующаяся длинная и короткая пунктирная линия 42 является границей полосы движения, образованной точками 22 границы в картографической информации. Граница 42 полосы движения может быть, например, рассчитана посредством интерполяции точек 22 границы.
Блок 35a соотнесения полосы движения проводит перпендикуляры 43 из точек 40 и 41 обнаружения к границе 42 полосы движения и вычисляет проекции 44 (круглые метки) перпендикуляров 43 как соответствующие точки, соответствующие точкам 40 и 41 обнаружения.
[0037]
Теперь будет рассмотрена Фиг. 4. Блок 35b вычисления параметров исправления вычисляет параметры M сдвигового исправления, которые представляют собой величины исправления, на которые точки 22 границы исправляются посредством сдвига, и параметры R поворотного исправления, которые представляют собой величины исправления, на которые точки 22 границы исправляются посредством поворота. Блок 35b вычисления параметров исправления независимо вычисляет относительно каждой из левосторонней точки 22L границы и правосторонней точки 22R границы параметры M сдвигового исправления и параметры R поворотного исправления.
Параметры M сдвигового исправления являются сдвиговыми компонентами (tx, ty) в матрице аффинного преобразования, выраженной, например, формулой (1) ниже:
[0038]
[Математическая формула 1]
[0039]
а параметры R поворотного исправления являются поворотными компонентами (cosθ, -sinθ, sinθ, cosθ) в матрице аффинного преобразования.
Следует отметить, что параметры M сдвигового исправления и параметры R поворотного исправления являются примерами «величины сдвигового исправления» и «величины поворотного исправления», описанных в формуле изобретения соответственно.
[0040]
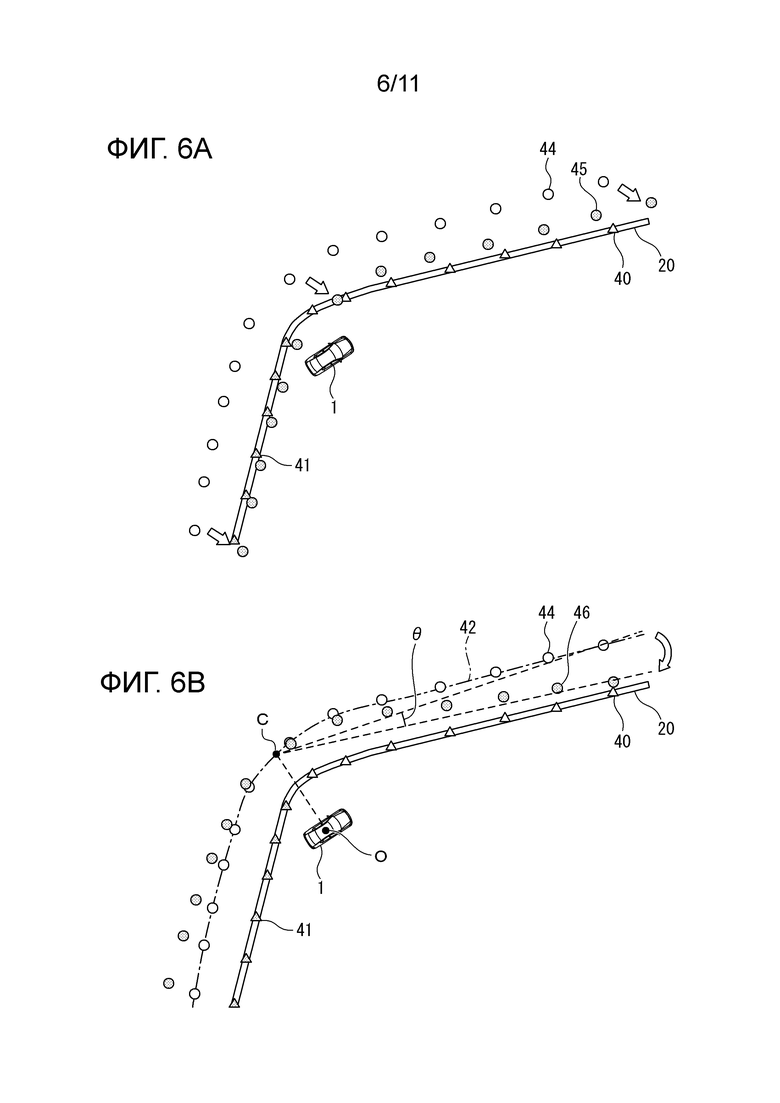
Теперь будет рассмотрена Фиг. 6А. Заштрихованные круглые метки 45 обозначают точки, полученные посредством сдвига соответствующих точек 44. Блок 35b вычисления параметров исправления вычисляет величину сдвига, которая минимизирует ошибку между соответствующими точками 45 после сдвига и точками 40 и 41 обнаружения в качестве параметров M сдвигового исправления.
Например, блок 35b вычисления параметров исправления вычисляет величину сдвига, которая минимизирует сумму квадратов разностей в положениях между соответствующими точками 45 после сдвига и точками 40 и 41 обнаружения в качестве параметров M сдвигового исправления.
[0041]
Теперь будет рассмотрена Фиг. 6B. Заштрихованные круглые метки 46 обозначают точки, полученные посредством поворота соответствующих точек 44 вокруг центра С вращения в качестве центра. Блок 35b вычисления параметров исправления устанавливает центр C вращения на линии, представляющей границу 42 полосы движения на карте. Например, блок 35b вычисления параметров исправления может установить центр С вращения таким образом, чтобы продольное положение центра С вращения вдоль полосы движения 2 совпадало с продольным положением текущего положения О собственного транспортного средства 1. Текущее положение О собственного транспортного средства 1 должно быть только, например, любой точкой собственного транспортного средства 1 и может быть, например, центральным положением собственного транспортного средства 1 или центральным положением переднего края собственного транспортного средства 1.
[0042]
Блок 35b вычисления параметров исправления вычисляет величину θ поворота, которая минимизирует ошибку между соответствующими точками 46 после перемещения и точками 40 и 41 обнаружения, и вычисляет поворотные компоненты (cosθ, -sinθ, sinθ, cosθ) согласно величине θ поворота, которые являются элементами вышеописанной формулы (1), в качестве параметров R поворотного исправления.
Например, блок 35b вычисления параметров исправления вычисляет величину θ поворота, которая минимизирует сумму квадратов разностей положений между соответствующими точками 46 после перемещения и точками 40 и 41 обнаружения, и вычисляет компоненты поворота согласно величине θ поворота в приведенной выше формуле (1) в качестве параметров R поворотного исправления.
[0043]
Теперь будет рассмотрена Фиг. 4. Блок 35c исправления полосы движения исправляет согласно параметрам M сдвигового исправления и параметрам R поворотного исправления, вычисленными блоком 35b вычисления параметров исправления, положения точек 22 границы, включенных в картографическую информацию (то есть положения точек 22 границы на карте).
Блок 35c исправления полосы движения независимо исправляет левосторонние точки 22L границы и правосторонние точки 22R границы.
[0044]
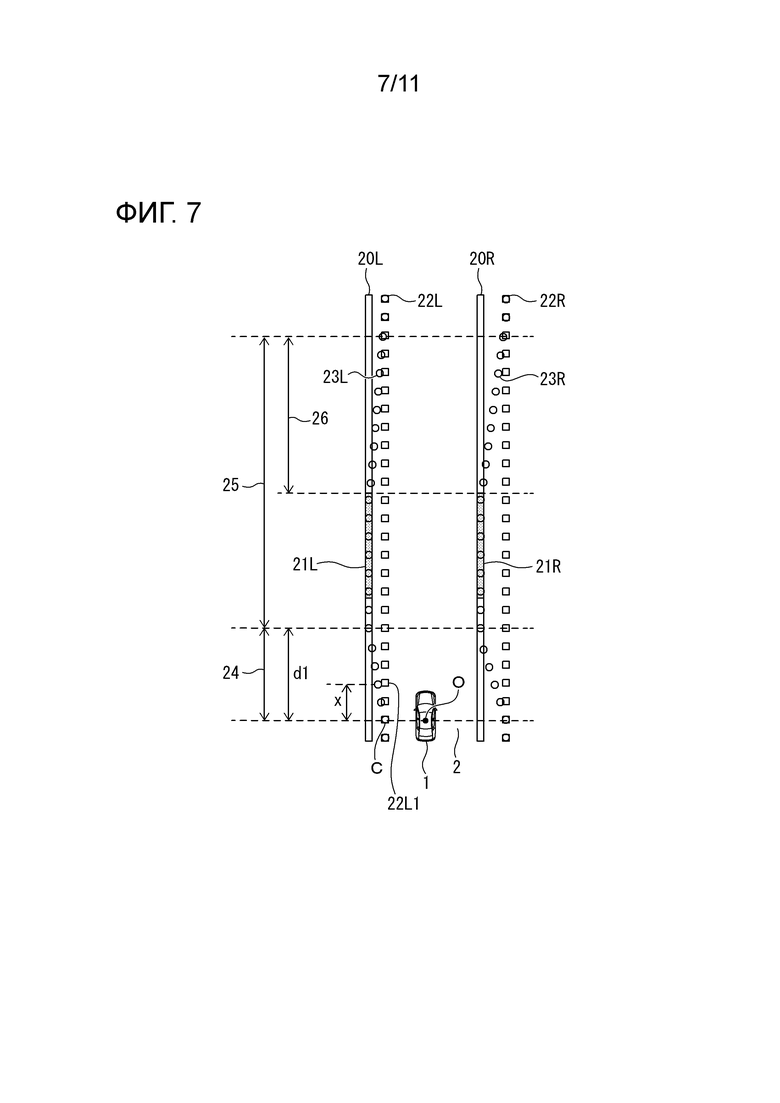
Теперь будет рассмотрена Фиг. 7. Блок 35c исправления полосы движения исправляет положения точек 22 границы (то есть положения линий границы полосы движения) на большую величину сдвигового исправления во второй области 25, которая находится сравнительно далеко от собственного транспортного средства 1, чем в первой области 24, которая сравнительно близка к собственному транспортному средству 1. Кроме того, блок 35c исправления полосы движения исправляет положения точек 22 границы (то есть положения линий границ полосы движения) на большую величину поворотного исправления в первой области 24, чем во второй области 25.
Например, блок 35c исправления полосы движения может установить область, расположенную перед собственным транспортным средством 1 и в пределах первого предварительно определенного расстояния d1 от текущего положения O собственного транспортного средства 1, в качестве первой области 24 и установить область, расположенную перед собственным транспортным средством 1 и дальше первого предварительно определенного расстояния d1 от текущего положения O собственного транспортного средства 1 в качестве второй области 25.
[0045]
Во второй области 25 блок 35c исправления полосы движения исправляет положения точек 22 границы с помощью параметров M сдвигового исправления и не поворачивает точки 22 границы.
Напротив, в первой области 24 блок 35c исправления полосы движения исправляет точки 22 границы на взвешенную сумму параметров R поворотного исправления и параметров M сдвигового исправления.
Блок 35c исправления полосы движения, например, определяет, согласно продольному расстоянию x между собственным транспортным средством 1 и точкой 22L1 границы, весовые коэффициенты параметров R поворотного исправления и параметров M сдвигового исправления, посредством которых исправляется точка 22L1 границы.
[0046]
Блок 35c исправления полосы движения определяет, что весовой коэффициент параметров R поворотного исправления будет тем больше, чем меньше продольное расстояние x.
Блок 35c исправления полосы движения может исправлять точку 22L1 границы, например, на величину исправления, вычисленную по приведенной ниже формуле (2).

Выполнение взвешивания таким образом вызывает исправление точки 22 границы на меньшую величину сдвига, поскольку точка 22 границы расположена ближе к собственному транспортному средству 1. Таким образом, даже когда точки 22 границы в картографической информации исправляются во время выполнения управления самостоятельным вождением, можно уменьшить изменение поведения собственного транспортного средства 1.
[0047]
Следует отметить, что в области 26, внутри второй области 25, которая расположена впереди и дальше дальности, в которой были обнаружены положения линий границы полосы движения (то есть участков 21 обнаружения), блок 35c исправления полосы движения может уменьшить величину исправления, на которую сдвигается положение точки 22 границы, на большую величину по мере увеличения продольного расстояния между собственным транспортным средством 1 и точкой 22 границы. Вследствие этой конфигурации можно предпочтительно использовать картографическую информацию в дальней области, где невозможно получить результат обнаружения линий границы полосы движения.
[0048]
Блок 35c исправления полосы движения сохраняет исправленную картографическую информацию в базе 14 данных карт. То есть блок 35c исправления полосы движения обновляет базу 14 данных карт на исправленную картографическую информацию. Когда картографическая информация получена от внешнего сервера картографических данных, блок 35c исправления полосы движения обновляет картографическую информацию на внешнем сервере картографических данных на исправленную картографическую информацию.
[0049]
Блок 35 исправления картографической информации итеративно выполняет вышеописанную обработку исправления с предварительно определенным периодом обработки. То есть блок 35 исправления картографической информации получает картографическую информацию, исправленную и сохраненную в предыдущем периоде, из базы 14 данных карт (или получает картографическую информацию с внешнего сервера картографических данных) и дополнительно исправляет полученную картографическую информацию посредством вышеописанной обработки исправления.
Следует заметить, что для величины исправления может быть установлен верхний предел, на который может быть исправлена картографическая информация за один период обработки. То есть блок 35b вычисления параметров исправления может ограничивать величины параметров R поворотного исправления и параметров M сдвигового исправления меньше или равными предварительно определенному верхнему пределу. Поскольку вследствие этой конфигурации можно избежать чрезмерного исправления точек 22 границы, даже когда точки 22 границы в картографической информации исправляются во время выполнения управления самостоятельным вождением, можно уменьшить изменение поведения собственного транспортного средства 1.
[0050]
Первое предварительно определенное расстояние d1, которое задает длину первой области 24, может быть, например, установлено согласно верхнему пределу поперечного ускорения, которое может быть создано в собственном транспортном средстве 1, и величине исправления, на которую точки 22 границы исправляются в поперечном направлении. В частности, первое предварительно определенное расстояние d1 может быть установлено согласно скорости собственного транспортного средства 1, верхнему пределу поперечного ускорения и поперечной компоненте параметров M сдвигового исправления.
Когда установлен верхний предел величины исправления, на которую картографическая информация может быть исправлена за один период обработки, первое предварительно определенное расстояние d1 может быть установлено согласно, вместо поперечного компонента параметров M сдвигового исправления, верхнему пределу величины поперечного исправления.
[0051]
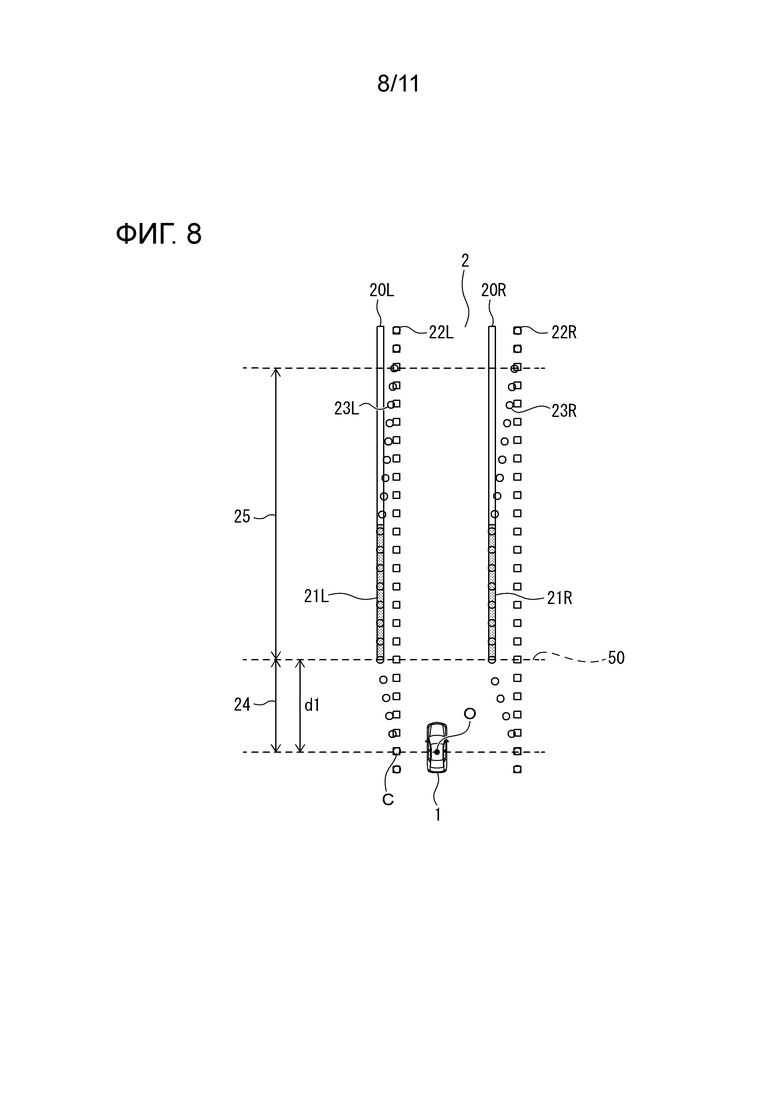
Кроме того, первое предварительно определенное расстояние d1 может быть установлено в зависимости от положений линий 20 границы полосы движения, обнаруженных датчиками 11 объектов, то есть положений участков 21 обнаружения.
Теперь будет рассмотрена Фиг. 8. Например, на перекрестке и т.п. линии 20 границы полосы движения, прерываются. Таким образом, линии 20 границы полосы движения не устанавливаются в действительности в области вблизи собственного транспортного средства 1, чем продольное положение 50, и датчики 11 объектов не обнаруживают линии 20 границы полосы движения в области, расположенной ближе к собственному транспортному средству 1, чем продольное положение 50.
[0052]
Например, блок 35c исправления полосы движения устанавливает продольное расстояние от продольного положения 50, которое является ближайшим положением, позволяющим обнаружить линии 20 границы полосы движения, до текущего положения O собственного транспортного средства 1 в качестве первого предварительно определенного расстояния d1.
Вследствие этой конфигурации, когда собственное транспортное средство 1 расположено в области, где линии 20 границы полосы движения не установлены в действительности, область, где линии 20 границы полосы движения не установлены в действительности, может быть установлена в качестве первой области 24.
В результате в области, где линии 20 границы полосы движения не установлены в действительности, можно уменьшить величину сдвигового исправления и, таким образом, уменьшить изменение поведения собственного транспортного средства 1.
[0053]
Теперь будет рассмотрена Фиг. 4. Блок 36 определения действий при вождении определяет, на основе результатов обнаружения, полученных блоком 33 объединения обнаружений и блоком 34 отслеживания объектов, и картографической информации, исправленной блоком 35 исправления картографической информации, схематичное действие при вождении собственного транспортного средства 1, которое устройство 10 содействия вождению должно выполнить.
Примеры действия при вождении, которое определяет блок 36 определения действий при вождении, включают в себя, например, остановку, временную остановку, скорость движения, замедление, ускорение, изменение курса, поворот направо, поворот налево, движение прямо, смену полосы движения на участке слияния или между множество полос движения, удержание полосы движения, обгон, реагирование на препятствие собственного транспортного средства 1 и т.п.
[0054]
Блок 36 определения действий при вождении создает на основе картографической информации, исправленной блоком 35 исправления картографической информации, и положений и ориентаций объектов вокруг собственного транспортного средства 1, карту пространства маршрута, которая представляет наличие или отсутствие маршрута и объекта вокруг собственного транспортного средства 1, и карту опасностей, в которой количественно определяется степень опасности поля движения. Блок 36 определения действий при вождении создает на основе карты пространства маршрута и карты опасностей план действий при вождении собственного транспортного средства 1.
[0055]
Блок 37 создания траектории создает, на основе действия при вождении, определенного блоком 36 определения действий при вождении, характеристик движения собственного транспортного средства 1 и карты пространства маршрута, потенциально подходящие варианты траектории движения (траектории движения, представленной относительными положениями относительно линий 20 границ полосы движения, вдоль которых собственному транспортному средству 1 предписывается двигаться, и профиль скорости, согласно которому собственному транспортному средству 1 предписывается двигаться.
Блок 37 создания траектории оценивает будущие опасности соответствующих потенциально подходящих вариантов на основе карты опасностей, выбирает оптимальную траекторию движения и профиль скорости и устанавливает выбранную траекторию движения и профиль скорости в качестве целевой траектории движения, вдоль которой собственному транспортному средству 1 предписывается двигаться, и целевой профиль скорости, согласно которому собственному транспортному средству 1 предписывается двигаться, соответственно.
Блок 38 управления транспортным средством задействует исполнительные механизмы 17 таким образом, что собственное транспортное средство 1 движется по целевой траектории движения со скоростью в соответствии с предварительно определенным профилем скорости, созданным блоком 37 создания траектории.
[0056]
(Функционирование)
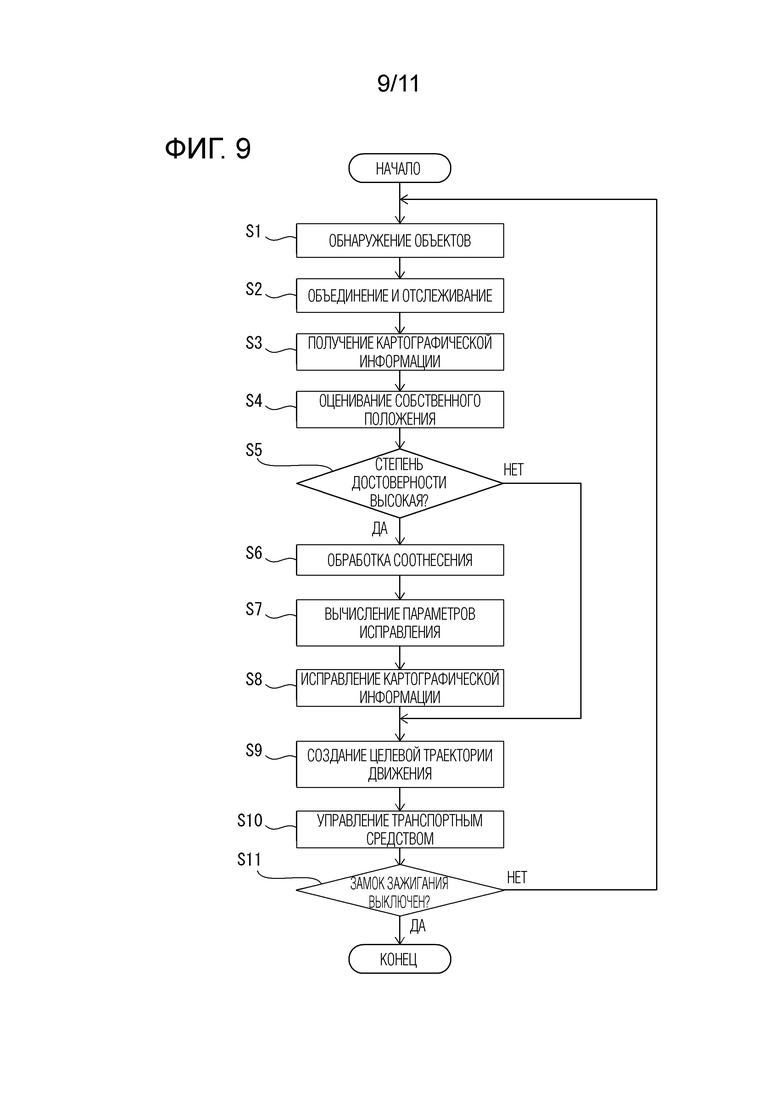
Далее пример функционирования устройства 10 содействия вождению в варианте осуществления будет описан со ссылкой на Фиг. 9.
На этапе S1 блок 30 обнаружения объектов, используя множество датчиков обнаружения объектов, обнаруживает относительные положения по отношению к собственному транспортному средству 1, ориентации, размеры, скорости и т.п. объектов, включающих в себя линии границы полосы движения, вокруг собственного транспортного средства. 1.
На этапе S2 блок 33 объединения обнаружений объединяет множество результатов обнаружения, полученных соответственно от множества датчиков обнаружения объектов, и выводит один результат обнаружения в отношении каждого из соответствующих объектов. Блок 34 отслеживания объектов отслеживает соответствующие объекты, которые были обнаружены и объединены, и предсказывает поведение объектов вокруг собственного транспортного средства 1. При этой обработке обнаруживаются положения линий 20 границы полосы движения, которые установлены в действительности на поверхности дороги, вокруг собственного транспортного средства 1.
[0057]
На этапе S3 блок 32 получения карты получает картографическую информацию, указывающую структуру дороги, по которой должно двигаться собственное транспортное средство 1.
На этапе S4 блок 31 оценивания собственного положения измеряет на основе результата измерения устройством 13 позиционирования и одометрии с использованием результатов обнаружения от датчиков 12 транспортного средства положение, ориентацию и скорость собственного транспортного средства 1 относительно предварительно определенной реперной точки.
[0058]
На этапе S5 блок 35 исправления картографической информации определяет, является ли ил нет высокой степень достоверности результата обнаружения участков 21 обнаружения линий 20 границы полосы движения. Когда степень достоверности высока (этап S5: Y), процесс переходит к этапу S6. Когда степень достоверности не высока (этап S5: N), процесс переходит к этапу S9.
На этапе S6 блок 35а соотнесения полосы движения выполняет обработку соотнесения. При обработке соотнесения блок 35a соотнесения полосы движения идентифицирует положения на карте (соответствующие точки 44), соответствующие точкам, которые датчики 11 объектов обнаружили в качестве участков 21 обнаружения.
[0059]
На этапе S7 блок 35b вычисления параметров исправления вычисляет параметры M сдвигового исправления и параметры R поворотного исправления.
На этапе S8 блок 35c исправления полосы движения исправляет согласно параметрам M сдвигового исправления и параметрам R поворотного исправления положения точек 22 границы, включенных в картографическую информацию (то есть положения точек 22 границы на карте).
[0060]
На этапе S9 блок 36 определения действий при вождении определяет действие при вождении на основе результатов обнаружения, полученных блоком 33 объединения обнаружений и блоком 34 отслеживания объектов, и картографической информации, исправленной блоком 35 исправления картографической информации. Блок 37 создания траектории создает, на основе действия при вождении, определенного блоком 36 определения действий при вождении, характеристик движения собственного транспортного средства 1 и картографической информации, исправленной блоком 35 исправления картографической информации, целевую траекторию движения, вдоль которой собственному транспортному средству 1 предписывается двигаться, и целевой профиль скорости, согласно которому собственному транспортному средству 1 предписывается двигаться.
Когда степень достоверности результата обнаружения участков 21 обнаружения не высока (этап S5: N), поскольку этапы S6-S8, на которых исправляется картографическая информация, пропускаются, картографическая информация, которая была исправлена вплоть до предыдущего периода, используется на этапе S9.
[0061]
На этапе S10 блок 38 управления транспортным средством задействует исполнительные механизмы 17 таким образом, что собственное транспортное средство 1 движется по целевой траектории движения со скоростью в соответствии с целевым профилем скорости, созданным блоком 37 создания траектории.
На этапе S11 определяется, выключен ли или нет замок зажигания (IGN) собственного транспортного средства 1. Когда замок зажигания не выключен (этап S11: N), процесс возвращается на этап S1. Когда замок зажигания выключен (этап S11: Y), процесс завершается.
[0062]
(Преимущественные эффекты первого варианта осуществления)
(1) Контроллер 16 выполняет способ исправления картографической информации для исправления картографической информации, включающей в себя информацию о линиях границы полосы движения, которые образованы точками 22 границы. Блок 30 обнаружения объектов, блок 33 объединения обнаружений и блок 34 отслеживания объектов обнаруживают относительные положения по отношению к собственному транспортному средству линий 20 границы полосы движения, которые установлены в действительности на поверхности дороги, вокруг собственного транспортного средства 1. Блок 31 оценивания собственного положения оценивает собственное положение собственного транспортного средства 1. Блок 35 исправления картографической информации исправляет, в зависимости от оцененного собственного положения и обнаруженных относительных положений линий 20 границы полосы движения, положения линий границы полосы движения, образованных точками 22 границы, включенными в картографическую информацию, в первой области 24, которая сравнительно близка к собственному транспортному средству 1, на большую величину поворотного исправления, чем во второй области 25, которая находится сравнительно далеко от собственного транспортного средства 1, и, во второй области 25, на большую величину сдвигового исправления, чем во первой области 24.
[0063]
В первой области 24, которая сравнительно близка к собственному транспортному средству 1, поскольку вследствие этой конфигурации величина сдвигового исправления становится малой, даже когда линии границ полосы движения, образованные точками 22 границы в картографической информации, исправляются, в то время как осуществляется управляемое самостоятельным вождением, можно уменьшить изменение поведения собственного транспортного средства 1.
Во второй области 25, которая находится сравнительно дальше от собственного транспортного средства 1, поскольку величина поворотного исправления становится малой, возможно уменьшить величину отклонения между исправленными точками 23 границы и фактическими линиями 20 границы полосы движения.
[0064]
(2) В первой области 24 величина поворотного исправления и величина сдвигового исправления могут быть взвешены согласно продольному расстоянию таким образом, что весовой коэффициент величины поворотного исправления становится больше по мере уменьшения продольного расстояния между собственным транспортным средством 1 и точкой 22 границы (для части линии границы полосы движения, имеющей более короткое продольное расстояние от собственного транспортного средства 1).
Вследствие этой конфигурации точка 22 границы ближе к собственному транспортному средству 1 (часть линии границы полосы движения ближе к собственному транспортному средству 1) исправляется на меньшую величину сдвига. Таким образом, даже когда линии границы полосы движения в картографической информации исправляются во время выполнения управления самостоятельным вождением, можно уменьшить изменение поведения собственного транспортного средства 1.
[0065]
(3) Блок 35c исправления полосы движения может установить область, расположенную перед собственным транспортным средством 1 и в пределах первого предварительно определенного расстояния d1 от положения собственного транспортного средства 1, в качестве первой области 24 и установить область, расположенную перед собственным транспортным средством 1 и дальше первого предварительно определенного расстояния d1 от положения собственного транспортного средства 1 в качестве второй области 25.
Благодаря этой конфигурации можно надлежащим образом установить первую область 24, которая находится сравнительно близко к собственному транспортному средству 1, и вторую область 25, которая находится сравнительно далеко от собственного транспортного средства 1.
[0066]
(4) Блок 35c исправления полосы движения может установить первое предварительно определенное расстояние d1 согласно верхнему пределу поперечного ускорения, создаваемого в собственном транспортном средстве 1, и величине исправления, на которую исправляются положения точек 22 границы (линий границы полосы движения) в поперечном направлении.
Благодаря этой конфигурации можно увеличить длину первой области 24, в которой величина сдвигового исправления сравнительно мала, согласно верхнему пределу поперечного ускорения и величине поперечного исправления. Следовательно, можно уменьшить изменение поведения собственного транспортного средства 1.
[0067]
(5) Блок 35c исправления полосы движения может установить первое предварительно определенное расстояние d1 в зависимости от положений обнаруженных линий 20 границы полосы движения.
Вследствие этой конфигурации, когда собственное транспортное средство 1 находится в области, где линии 20 границы полосы движения не установлены в действительности, можно установить область, где линии 20 границы полосы движения не установлены в действительности, в качестве первой области 24. Следовательно, в области, где линии 20 границы полосы движения не установлены в действительности, возможно уменьшить величину сдвигового исправления и, таким образом, уменьшить изменение поведения собственного транспортного средства 1.
[0068]
(6) Блок 35c исправления полосы движения может в области, расположенной впереди и дальше дальности, в которой обнаруживаются положения линий 20 границы полосы движения, уменьшать величину исправления положения точки 22 границы на большую величину, поскольку продольное расстояние между собственным транспортным средством 1 и точкой 22 границы дальше.
Благодаря этой конфигурации можно предпочтительно использовать картографическую информацию в дальней области, где невозможно получить результат обнаружения линий 20 границы полосы движения.
[0069]
(7) Блок 35c исправления полосы движения может независимо исправлять положения точек 22 границы на правой стороне полосы движения и положения точек 22 границы на левой стороне полосы движения. Вследствие этой конфигурации, даже когда расстояние между фактически обнаруженной левосторонней линией 20L границы полосы движения и правосторонней линией 20R границы полосы движения отличается от ширины полосы движения на карте, возможно соответствующим образом исправить левосторонние точки 22L границы и правосторонние точки 22R границы в зависимости от положений обнаружения, которые фактически обнаруживаются как левосторонняя линия 20L границы полосы движения и правосторонняя линия 20R границы полосы движения.
[0070]
(Второй вариант осуществления)
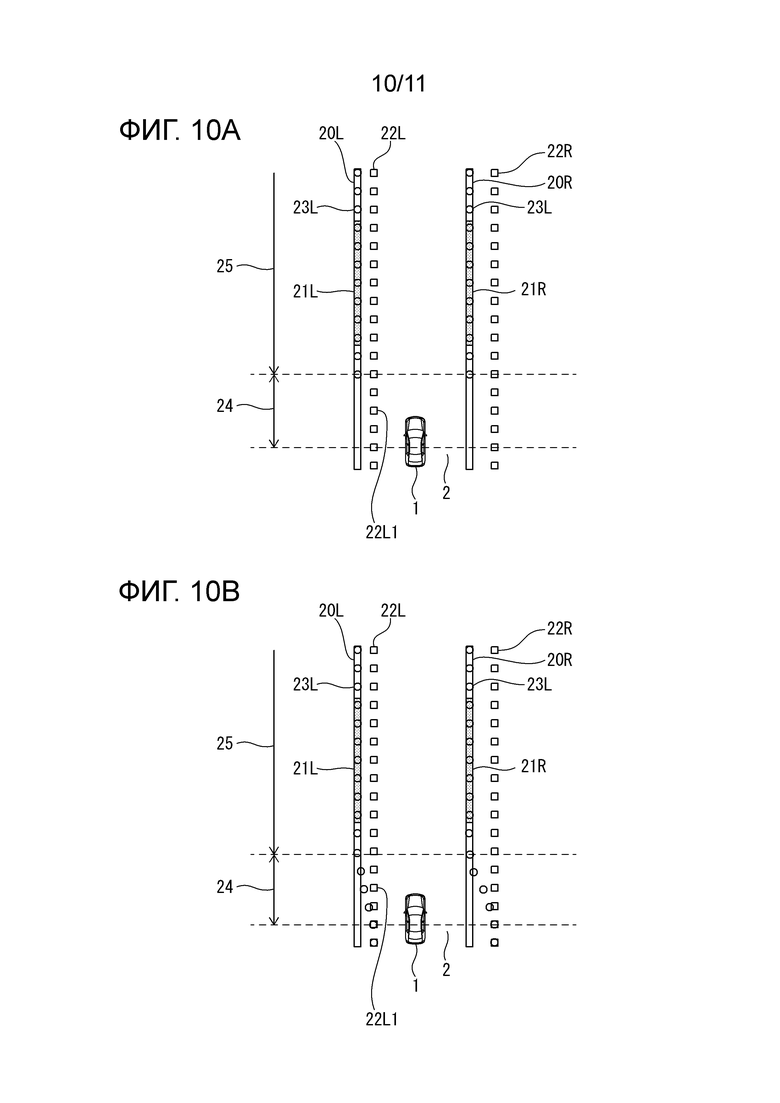
Далее будет описан второй вариант осуществления. Блок 35 исправления картографической информации второго варианта осуществления исправляет положения линий границ полосы движения (точек 22 границы) только на величину поворотного исправления в первой области 24 и только на величину сдвигового исправления во второй области 25.
Теперь будет описана Фиг. 10А. Сначала, во второй области 25 блок 35c исправления полосы движения исправляет положения точек 22 границы с помощью параметров M сдвигового исправления и не поворачивает точки 22 границы.
[0071]
Далее, как показано на Фиг. 10В, блок 35c исправления полосы движения определяет углы поворота точек 22 границы в первой области 24 таким образом, что границы полосы движения в первой области 24 и границы полосы движения во второй области 25, которые образованы исправленными точками 23 границы, соединяются друг с другом в положении границы между первой областью 24 и второй областью 25.
Следует отметить, что вместо определения углов поворота таким образом, чтобы границы полосы движения в первой области 24 и границы полосы движения во второй области 25 соединялись друг с другом, точки 22 границы в первой области 24 могут быть повернуты посредством параметров R поворотного исправления. В этом случае первое предварительно определенное расстояние d1 (то есть длина первой области 24) может быть отрегулировано таким образом, что границы полосы движения в первой области 24 и границы полосы движения во второй области 25 соединяются с друг друга в положении границы между первой областью 24 и второй областью 25.
[0072]
(Преимущественные эффекты второго варианта осуществления)
Блок 35c исправления полосы движения исправляет положения точек 22 границы только на величину поворотного исправления в первой области 24 и только на величину сдвигового исправления во второй области 25.
Например, блок 35c исправления полосы движения может исправлять положения точек 22 границы посредством поворота положений точек 22 границы в первой области 24 таким образом, что границы полосы движения в первой области 24 и границы полосы движения во второй области 25 соединяются друг с другом.
Даже когда положения точек 22 границы исправляются, как описано выше, как и в первом варианте осуществления, возможно уменьшить величину сдвигового исправления в первой области 24, которая сравнительно близка к собственному транспортному средству 1. Кроме того, возможно уменьшить величину поворотного исправления во второй области 25, которая находится сравнительно далеко от собственного транспортного средства 1.
[0073]
(Третий вариант осуществления)
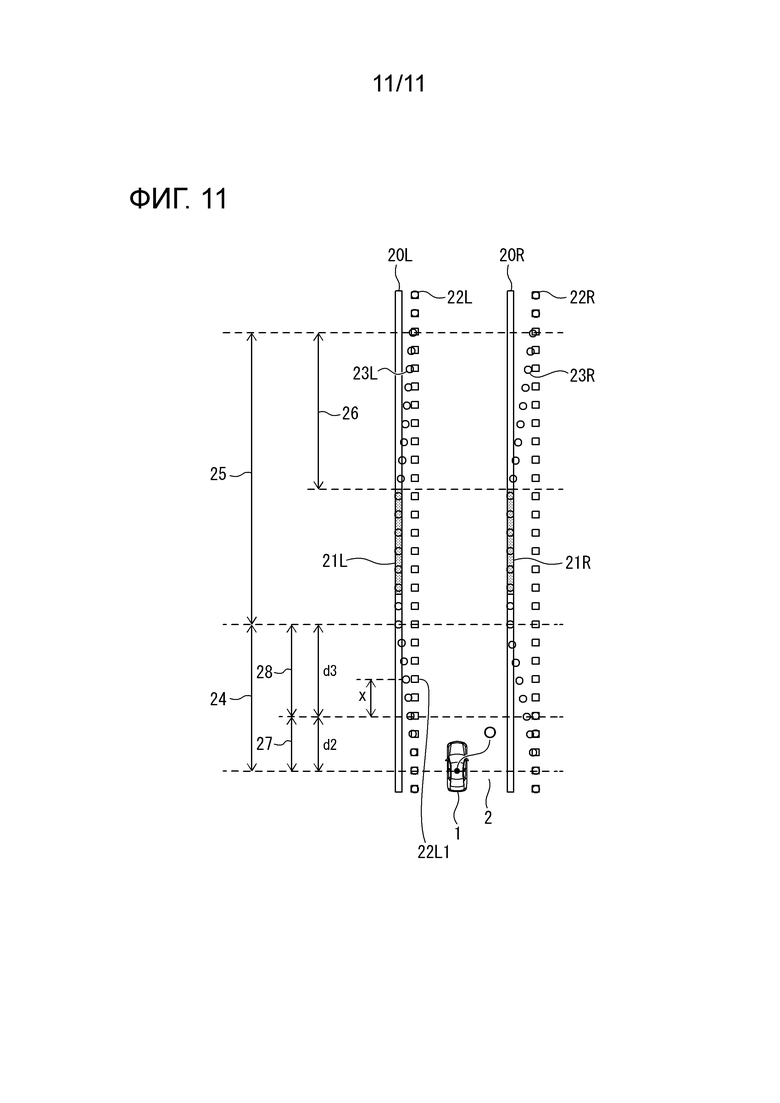
Далее будет описан третий вариант осуществления. В третьем варианте осуществления область, которая находится сравнительно близко к собственному транспортному средству 1, и область, которая находится сравнительно далеко от собственного транспортного средства 1, задаются в первой области 24, а положения точек 22 границы, как и во втором варианте осуществления, исправляются только на величину поворотного исправления в сравнительно близкой области, а величина поворотного исправления и величина сдвигового исправления, как и в первом варианте осуществления, взвешиваются в сравнительно дальней области.
[0074]
Теперь будет рассмотрена Фиг. 11. Первая область 24 включает в себя третью область 27, которая является областью, расположенной перед собственным транспортным средством 1 и в пределах второго предварительно определенного расстояния d2 от положения собственного транспортного средства 1, и четвертую область 28, которая является областью, расположенной впереди собственного транспортного средства 1 и далее, чем второе предварительно определенное расстояние d2 от положения собственного транспортного средства 1.
В третьей области 27 блок 35c исправления полосы движения исправляет положения точек 22 границы только посредством поворота с использованием параметров R поворотного исправления.
[0075]
С другой стороны, в четвертой области 28 блок 35c исправления полосы движения исправляет точки 22 границы с использованием взвешенной суммы параметров R поворотного исправления и параметров M сдвигового исправления.
Блок 35c исправления полосы движения может, например, определять весовые коэффициенты параметров R поворотного исправления и параметров M сдвигового исправления, посредством которых исправляется точка 22L1 границы, таким образом, что весовой коэффициент параметра R поворотного исправления становится больше по мере уменьшения продольного расстояния между собственным транспортным средством 1 и точкой 22L1 границы.
[0076]
Например, когда длина четвертой области 28 обозначена как d3, а продольное расстояние от положения границы между третьей областью 27 и четвертой областью 28 до точки 22L1 границы обозначено как x, блок 35c исправления полосы движения может исправить точку 22L1 границы, например, на величину исправления, вычисленную по приведенной ниже формуле (3).

[0077]
(Преимущественные эффекты третьего варианта осуществления)
Первая область 24 включает в себя третью область 27, которая является областью, расположенной перед собственным транспортным средством 1 и в пределах второго предварительно определенного расстояния d2 от положения собственного транспортного средства 1, и четвертую область 28, которая является областью, расположенной перед собственным транспортным средством 1 и дальше второго предварительно определенного расстояния d2 от положения собственного транспортного средства 1. В третьей области 27 блок 35c исправления полосы движения исправляет положения точек 22 границы только на величину поворотного исправления. В четвертой области 28 величина поворотного исправления и величина сдвигового исправления взвешиваются согласно продольному расстоянию таким образом, что весовой коэффициент величины поворотного исправления становится больше по мере уменьшения продольного расстояния между собственным транспортным средством 1 и точкой 22 границы.
[0078]
Благодаря этой конфигурации можно установить третью область 27, в которой положения точек 22 границы исправляются только на величину поворотного исправления, и вторую область 25, в которой положения точек 22 границы исправляются только на величину сдвига, и также возможно установить между третьей областью 27 и второй областью 25 четвертую область 28, в которой весовые коэффициенты параметров R поворотного исправления и параметров M сдвигового исправления постепенно изменяются, в качестве буферной области.
[0079]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, и организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Несмотря на то, что один или более вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема настоящего изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0080]
1 Собственное транспортное средство
10 Устройство содействия вождению
11 Датчик объектов
12 Датчик транспортного средства
13 Устройство позиционирования
14 База данных карт
15 Устройство связи
16 Контроллер
17 Исполнительный механизм
18 Процессор
19 Запоминающее устройство
30 Блок обнаружения объектов
31 Блок оценивания собственного положения
32 Блок получения карты
33 Блок объединения обнаружений
34 Блок отслеживания объектов
35 Блок исправления картографической информации
35a Блок соотнесения полосы движения
35b Блок вычисления параметров исправления
35c Блок исправления полосы движения
36 Блок определения действий при вождении
37 Блок создания траектории
38 Устройство управления транспортным средством
Изобретение относится к способу исправления картографической информации, способу содействия вождению и устройству исправления картографической информации. Способ исправления картографической информации для исправления картографической информации включает в себя информацию линии границы полосы движения, причем обнаруживают положение по отношению к собственному транспортному средству (ТС) линии границы полосы движения, установленной в действительности на поверхности дороги, вокруг собственного ТС. Затем оценивают собственное положение на карте собственного ТС; и исправляют в зависимости от оцененного собственного положения и обнаруженного положения линии границы полосы движения, положения линии границы полосы движения, включенной в картографическую информацию, в первой области, сравнительно близкой к собственному ТС, на большую величину поворотного исправления, чем во второй области, сравнительно дальней от собственного ТС, и во второй области на большую величину сдвигового исправления, чем в первой области. Технический результат – обеспечение возможности предотвращения изменения поведения ТС, даже когда картографическая информация, включающая в себя информацию о положении границ полосы движения, исправляется во время выполнения управления содействием вождению. 3 н. и 9 з.п. ф-лы, 11 ил.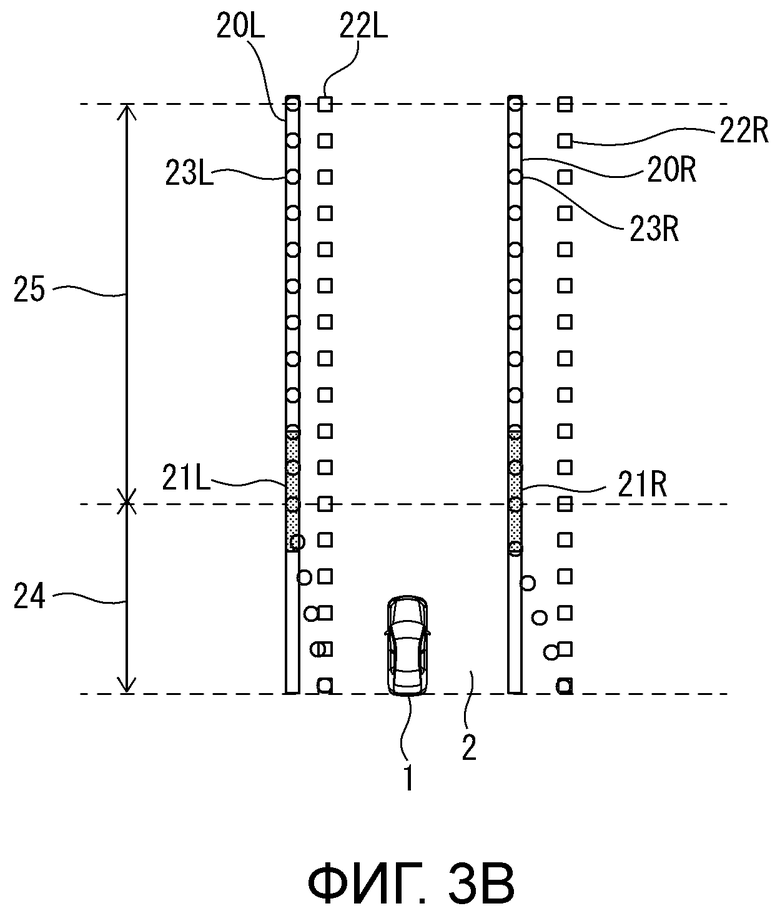
1. Способ исправления картографической информации для исправления картографической информации, включающей в себя информацию линии границы полосы движения, при этом способ содержит этапы, на которых:
обнаруживают положение по отношению к собственному транспортному средству линии границы полосы движения, установленной в действительности на поверхности дороги, вокруг собственного транспортного средства;
оценивают собственное положение на карте собственного транспортного средства; и
исправляют, в зависимости от оцененного собственного положения и обнаруженного положения линии границы полосы движения, положение линии границы полосы движения, включенной в картографическую информацию, в первой области, сравнительно близкой к собственному транспортному средству, на большую величину поворотного исправления, чем во второй области, сравнительно дальней от собственного транспортного средства, и во второй области на большую величину сдвигового исправления, чем в первой области.
2. Способ исправления картографической информации по п. 1, при этом в первой области способ содержит этап, на котором взвешивают, таким образом, что весовой коэффициент величины поворотного исправления становится больше для линии границы полосы движения в положении, имеющем более короткое продольное расстояние от собственного транспортного средства, величину поворотного исправления и величину сдвигового исправления согласно продольному расстоянию.
3. Способ исправления картографической информации по п. 1, при этом способ содержит этап, на котором исправляют положение линии границы полосы движения только на величину поворотного исправления в первой области и только на величину сдвигового исправления во второй области.
4. Способ исправления картографической информации по п. 3, при этом способ содержит этап, на котором исправляют положение линии границы полосы движения посредством поворота положения линии границы полосы движения в первой области таким образом, что линия границы полосы движения в первой области и линия границы полосы движения во второй области соединяются друг с другом.
5. Способ исправления картографической информации по любому одному из пп. 1-4, в котором первая область является областью, расположенной перед собственным транспортным средством и в пределах предварительно определенного расстояния от положения собственного транспортного средства, а вторая область является областью, расположенной перед собственным транспортным средством и дальше предварительно определенного расстояния от положения собственного транспортного средства.
6. Способ исправления картографической информации по п. 5, в котором
первая область включает в себя третью область, причем третья область является областью, расположенной перед собственным транспортным средством и в пределах второго предварительно определенного расстояния от положения собственного транспортного средства, и четвертую область, причем четвертая область является областью, расположенной перед собственным транспортным средством и дальше второго предварительно определенного расстояния от положения собственного транспортного средства,
в третьей области способ содержит этап, на котором исправляют положение линии границы полосы движения только на величину поворотного исправления, и
в четвертой области способ содержит этап, на котором взвешивают, таким образом, что весовой коэффициент величины поворотного исправления становится больше для линии границы полосы движения в положении, имеющем более короткое продольное расстояние от собственного транспортного средства, величину поворотного исправления и величину сдвигового исправления согласно продольному расстоянию.
7. Способ исправления картографической информации по п. 5 или 6, при этом способ содержит этап, на котором устанавливают предварительно определенное расстояние согласно верхнему пределу поперечного ускорения, создаваемого в собственном транспортном средстве, и величине исправления, на которую исправляется положение линии границы полосы движения в поперечном направлении.
8. Способ исправления картографической информации по п. 5 или 6, при этом способ содержит этап, на котором устанавливают предварительно определенное расстояние в зависимости от обнаруженного положения линии границы полосы движения.
9. Способ исправления картографической информации по любому одному из пп. 1-8, при этом в области, расположенной впереди и дальше дальности, в которой обнаружено положение линии границы полосы движения, способ содержит этап, на котором уменьшают величину исправления положения точки границы на большую величину для линии границы полосы движения в положении, имеющем дальнее продольное расстояние от собственного транспортного средства.
10. Способ исправления картографической информации по любому одному из пп. 1-8, при этом способ содержит этап, на котором независимо исправляют положение линии границы полосы движения на правой стороне полосы движения и положение линии границы полосы движения на левой стороне полосы движения.
11. Способ содействия вождению, в котором способ исправления картографической информации включает в себя исправление картографической информации, включающей в себя информацию линии границы полосы движения, при этом способ содействия вождению содержит этапы, на которых:
обнаруживают положение по отношению к собственному транспортному средству линии границы полосы движения или разграничительной линии, установленной в действительности на поверхности дороги, вокруг собственного транспортного средства;
оценивают собственное положение на карте собственного транспортного средства;
исправляют, в зависимости от оцененного собственного положения и обнаруженного положения линии границы полосы движения, положение линии границы полосы движения, включенной в картографическую информацию, в первой области, сравнительно близкой к собственному транспортному средству, на большую величину поворотного исправления, чем во второй области, сравнительно дальней от собственного транспортного средства, и во второй области на большую величину сдвигового исправления, чем в первой области;
создают траекторию движения на основе исправленной линии границы полосы движения; и
осуществляют содействие вождению таким образом, чтобы собственное транспортное средство двигалось по созданной траектории движения.
12. Устройство исправления картографической информации, выполненное с возможностью исправлять картографическую информацию, включающую в себя информацию точки границы, образующей границу полосы движения, содержащее:
датчик, выполненный с возможностью обнаруживать положение линии границы полосы движения, установленной в действительности на поверхности дороги, вокруг собственного транспортного средства; и
контроллер, выполненный с возможностью оценивать собственное положение собственного транспортного средства и исправлять, в зависимости от оцененного собственного положения и обнаруженного положения линии границы полосы движения, положение точки границы, включенной в картографическую информацию, в первой области, сравнительно близкой к собственному транспортному средству, на большую величину поворотного исправления, чем во второй области, сравнительно дальней от собственного транспортного средства, и во второй области на большую величину сдвигового исправления, чем в первой области.
| JP 2019179217 A, 17.10.2019 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2667675C1 |
| СПОСОБ ФОРМИРОВАНИЯ УЛУЧШЕННЫХ КАРТОГРАФИЧЕСКИХ ДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАВИГАЦИОННЫХ УСТРОЙСТВАХ | 2007 |
|
RU2482540C2 |
