Область техники
[0001] Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Описание предшествующего уровня техники
[0002] В прошлом были известны способы помощи при вождении для временной остановки рассматриваемого транспортного средства в местоположении, ближайшем к въезду на круговую проезжую часть перекрестка с круговым движением (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2018-503169.
Раскрытие изобретения
Задачи, решаемые изобретением
[0004] В способах помощи при вождении предшествующего уровня техники раскрыто управление движением рассматриваемого транспортного средства, когда рассматриваемое транспортное средство выезжает на круговую проезжую часть перекрестка с круговым движением. Однако не учитывалось местоположение по ширине рассматриваемого транспортного средства на въезде, через который проезжает рассматриваемое транспортное средство при въезде на круговую проезжую часть. Следовательно, существует риск того, что рассматриваемому транспортному средству может потребоваться сменить полосу движения при движении по круговой проезжей части, и в результате движение других транспортных средств будет затруднено.
Настоящее изобретение было разработано с учетом проблемы, описанной выше, и целью настоящего раскрытия является обеспечение способа помощи при вождении и устройства помощи при вождении, с помощью которых можно минимизировать частоту смены полосы движения на круговой проезжей части.
Средства для решения этой проблемы
[0005] Для достижения цели, описанной выше, настоящее раскрытие представляет способ помощи при вождении, содержащий обеспечение контроллера, который вычисляет целевой маршрут, по которому должно двигаться рассматриваемое транспортное средство, и выполняет управление помощью при вождении на основе целевого маршрута, при этом способ выполняет помощь при движении рассматриваемого транспортного средства.
В этом способе помощи при вождении выполняется оценка, прибыло ли рассматриваемое транспортное средство к перекрестку с круговым движением, имеющую круговую проезжую часть, с которой соединены три или более радиальных проезжих частей. Когда оценено, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, указываются местоположение въезда, где рассматриваемое транспортное средство въезжает на круговую проезжую часть, и местоположение выезда, где рассматриваемое транспортное средство выезжает с круговой проезжей части. Местоположение въезда, которое представляет собой местоположение по ширине рассматриваемого транспортного средства на въезде, определяется на основе взаимного расположения между въездом и выездом.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0006] Следовательно, в настоящем раскрытии можно минимизировать частоту смены полосы движения на круговой проезжей части.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 - общая схема системы управления автономным вождением, к которой применены способ помощи при вождении и устройство помощи при вождении в соответствии с первым вариантом осуществления;
Фиг. 2 - схематическая диаграмма перекрестка с круговым движением;
Фиг. 3 - блок-схема управления процессора оценки распознавания согласно первому варианту осуществления;
Фиг. 4 - блок-схема последовательности операций управления помощью при вождении, выполняемого процессором оценки распознавания первого варианта осуществления;
Фиг. 5 - блок-схема последовательности операций первого управления установкой местоположения въезда, выполняемого процессором оценки распознавания первого варианта осуществления;
Фиг. 6 - блок-схема последовательности операций второго управления установкой местоположения въезда, выполняемого процессором оценки распознавания первого варианта осуществления;
Фиг. 7 - блок-схема последовательности операций третьего управления установкой местоположения въезда, выполняемого процессором оценки распознавания первого варианта осуществления;
Фиг. 8 - блок-схема последовательности операций четвертого управления установкой местоположения въезда, выполняемого процессором оценки распознавания первого варианта осуществления;
Фиг. 9 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором въезд рассматриваемого транспортного средства представляет собой две полосы движения, и рассматриваемое транспортное средство должно двигаться прямо через перекресток с круговым движением;
Фиг. 10 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором существует множество радиальных проезжих частей между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства;
Фиг. 11 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором существует высокая степень скопления транспортных средств при въезде на радиальную проезжую часть между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства;
Фиг. 12 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором въезд рассматриваемого транспортного средства представляет собой две полосы движения, и рассматриваемое транспортное средство должно двигаться налево через перекресток с круговым движением;
Фиг. 13 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором въезд рассматриваемого транспортного средства представляет собой две полосы движения, и рассматриваемое транспортное средство должно двигаться направо через перекресток с круговым движением;
Фиг. 14 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором въезд рассматриваемого транспортного средства представляет собой три полосы движения, и рассматриваемое транспортное средство должно двигаться налево через перекресток с круговым движением;
Фиг. 15 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором въезд рассматриваемого транспортного средства представляет собой три полосы движения, и рассматриваемое транспортное средство должно двигаться прямо через перекресток с круговым движением;
Фиг. 16 - схематическая диаграмма действия по установке местоположения въезда в сценарии, в котором въезд рассматриваемого транспортного средства представляет собой три полосы движения, и рассматриваемое транспортное средство должно двигаться направо через перекресток с круговым движением.
Предпочтительные варианты осуществления изобретения
[0008] Предпочтительный вариант осуществления способа помощи при вождении и устройства помощи при вождении согласно настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
Первый вариант осуществления
[0009] Способ помощи при вождении и устройство помощи при вождении в первом варианте осуществления применяются к автономно управляемому транспортному средству (одному примеру транспортного средства с помощью при движении; рассматриваемому транспортному средству), в котором используется информация о целевом маршруте (информация маршрута движения), сгенерированная процессором оценки распознавания, и для которого движение/торможение/рулевое управление и управляются автономно путем выбора режима автономного вождения. Конфигурации в первом варианте осуществления описаны ниже в каждом из разделов «Общая конфигурация системы», «Конфигурация блока управления процессора оценки распознавания», «Конфигурация процесса для управления помощью при вождении», «Конфигурация процесса для первого управления установкой местоположения въезда», «Конфигурация процесса для второго управления установкой местоположения въезда», «Конфигурация процесса для третьего управления установкой местоположения въезда» и «Конфигурация процесса для четвертого управления установкой местоположения въезда».
[0010] [Общая конфигурация системы]
Система A автономного вождения снабжена бортовым датчиком 1, блоком 2 хранения картографических данных, процессором 3 оценки распознавания (контроллером), блоком 4 управления автономным вождением, исполнительным механизмом 5 и устройством 7 отображения, как показано на фиг. 1.
[0011] Бортовой датчик 1 имеет камеру 11, радар 12, GPS 13 и бортовой коммуникатор 14 данных. Информация датчика, полученная бортовым датчиком 1, выводится в процессор 3 оценки распознавания.
[0012] Камера 11 представляет собой датчик распознавания окружения, который выполняет функцию получения информации об окружении рассматриваемого транспортного средства, такой как полосы движения, впереди идущие транспортные средства и пешеходы, из данных изображения в качестве функции, необходимой для автономного вождения. Камера 11 конфигурируется путем объединения, например, камеры распознавания спереди рассматриваемого транспортного средства, камеры распознавания сзади, камеры распознавания справа, камеры распознавания слева и т.д.
[0013] Объекты на проезжей части рассматриваемого транспортного средства, полосы движения, объекты за пределами проезжей части рассматриваемого транспортного средства (дорожные конструкции, впереди идущие транспортные средства, сзади идущие транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды, мотоциклы), проезжая часть рассматриваемого транспортного средства (белые дорожные линии, границы дороги, стоп-линии, пешеходные переходы), дорожные знаки (ограничения скорости) и т.д. считываются камерой 11.
[0014] Радар 12 представляет собой датчик измерения расстояния, который выполняет функцию определения присутствия объектов в окрестностях рассматриваемого транспортного средства и функцию определения расстояний до объектов в окрестностях рассматриваемого транспортного средства, в качестве функций, необходимых для автономного вождения. «Радар 12» в этом примере является общим термином, включающим в себя радар, использующий радиоволны, лидар, использующий свет, и сонар, использующий ультразвуковые волны. Например, в качестве радара 12 можно использовать лазерный радар, радар на основе миллиметровых волн, ультразвуковой радар, лазерный дальномер и т.д. Радар 12 конфигурируется путем объединения, например, переднего радара рассматриваемого транспортного средства, заднего радара, правого радара, левого радара и т.д.
[0015] Определяются местоположения объектов на проезжей части рассматриваемого транспортного средства, объекты за пределами проезжей части рассматриваемого транспортного средства (дорожные конструкции, впереди идущие транспортные средства, сзади идущие транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды, мотоциклы) и т.д. и расстояние до объектов определяется радаром 12. Если угол обзора недостаточен, угол обзора можно при необходимости увеличить.
[0016] GPS 13 представляет собой датчик местоположения рассматриваемого транспортного средства, который имеет антенну 13a GNSS и использует спутниковую связь для определения местоположения рассматриваемого транспортного средства (широты и долготы), когда рассматриваемое транспортное средство остановлено или движется. «GNSS» - это сокращение от «Глобальная навигационная спутниковая система», а «GPS» - это сокращение от «Глобальная система определения местоположения».
[0017] Бортовой коммуникатор 14 данных представляет собой датчик внешних данных, который осуществляет беспроводную связь с коммуникатором 8 внешних данных через антенны 8а, 14а приемопередатчика и, таким образом, получает от внешнего источника информацию, которую невозможно получить от рассматриваемого транспортного средства.
[0018] В случаях, когда коммуникатор 8 внешних данных является, например, коммуникатором данных, установленным в другом транспортном средстве, движущемся поблизости от рассматриваемого транспортного средства, бортовой коммуникатор 14 данных выполняет связь «транспортное средство-транспортное средство» между рассматриваемым транспортным средством и другим транспортным средством. Бортовой коммуникатор 14 данных может, по самоинициализированному запросу, получать информацию, необходимую для рассматриваемого транспортного средства, из множества информации, хранящейся в другом транспортном средстве, при этом сбор данных выполняется посредством связи «транспортное средство-транспортное средство».
[0019] В случаях, когда коммуникатор 8 внешних данных является, например, коммуникатором данных, предназначенным для инфраструктурного оборудования, бортовой коммуникатор 14 данных выполняет связь «транспортное средство-инфраструктура» между рассматриваемым транспортным средством и инфраструктурным оборудованием. Бортовой коммуникатор 14 данных может, по самоинициализированному запросу, получать информацию, необходимую для рассматриваемого транспортного средства, из множества информации, хранящейся в инфраструктурном оборудовании, при этом сбор данных выполняется посредством связи «транспортное средство-инфраструктура». Поэтому в случаях, когда хранимая информация содержит, например, информацию о том, что картографические данные, хранимые в блоке 2 хранения картографических данных, отсутствуют, или информацию, измененную по сравнению с информацией в картографических данных, возможно, что отсутствующая информация/измененная информация будет предоставлена дополнительно. Кроме того, можно получить информацию о дорожном движении, такую как информация о заторах или информация об ограничениях движения, относящуюся к целевому маршруту, по которому планируется движение рассматриваемого транспортного средства.
[0020] Блок 2 хранения картографических данных конфигурируется из бортовой памяти, которая содержит «электронные картографические данные», в которых связаны картографическая информация и широта/долгота. Когда местоположение рассматриваемого транспортного средства, определенное GPS 13, распознается процессором 3 оценки распознавания как информация о местоположении рассматриваемого транспортного средства, блок 2 хранения картографических данных отправляет картографические данные, центрированные по местоположению рассматриваемого транспортного средства, в процессор 3 оценки распознавания.
[0021] Картографические данные содержат информацию о дорогах, связанную с отдельными местоположениями, информация о дорогах задана узлами и соединениями, которые соединяют узлы. Информация о дорогах включает в себя: информацию, которая определяет дорогу в соответствии с местоположением/областью дороги, и информацию, относящуюся к идентификации дороги для каждой дороги, ширине дороги для каждой дороги и форме дороги. Информация о дорогах сохраняется для каждого элемента идентификационной информации, относящейся к дорожным соединениям, в ассоциации с другой информацией, относящейся к перекресткам, такой как местоположение перекрестка, направление въезда на перекресток и классификация перекрестка. Кроме того, информация о дорогах сохраняется для каждого элемента идентификационной информации, относящейся к дорожным соединениям, в ассоциации с другой информацией, относящейся к дорогам, такой как классификация дороги, ширина дороги, форма дороги, возможность движения вперед, отношение приоритетов, относящееся к движению, возможность проезда других транспортных средств (возможность въезда на смежную полосу движения), ограничения скорости и дорожные знаки.
[0022] Процессор 3 оценки распознавания выполняет комплексную обработку входной информации (информации об окружении рассматриваемого транспортного средства, информации о местоположении рассматриваемого транспортного средства, информации картографических данных, информации о пункте назначения и т.д.) от бортового датчика 1 или блока 2 хранения картографических данных и генерирует целевой маршрут (маршрут движения), профиль целевой скорости транспортного средства (включая профиль ускорения и/или профиль замедления) и т.д. Сгенерированная информация о целевом маршруте и информация о профиле целевой скорости выводятся в блок 4 управления автономным вождением вместе с информацией о местоположении рассматриваемого транспортного средства и т.д. В частности, процессор 3 оценки распознавания генерирует целевой маршрут от текущего местоположения до пункта назначения на основе, среди прочего, информации о дорогах из блока 2 хранения картографических данных или способа поиска маршрута, и генерирует профиль целевой скорости и т.д., сопоставленный с целевым маршрутом. Когда было оценено, что автономное вождение не может поддерживаться согласно результату обнаружения окружения рассматриваемого транспортного средства бортовым датчиком 1, когда рассматриваемое транспортное средство остановлено или движется по целевому маршруту, процессор 3оценки распознавания последовательно корректирует целевой маршрут, профиль целевой скорости и т.д. на основе результатов обнаружения окружения рассматриваемого транспортного средства. Целевой маршрут называется целевым маршрутом даже после коррекции. В частности, целевой маршрут также включает в себя скорректированный маршрут.
[0023] Кроме того, когда рассматриваемое транспортное средство прибыло к перекрестку 100 с круговым движением (см. фиг. 2), процессор 3 оценки распознавания выполняет управление установкой местоположения въезда, чтобы установить местоположение по ширине рассматриваемого транспортного средства V на въезде 105а рассматриваемого транспортного средства (ниже указывается как «местоположение въезда») и генерирует информацию о местоположении въезда. Затем устанавливается целевое местоположение движения на основе информации о местоположении въезда. Информация о целевом местоположении движения выводится вместе с информацией о местоположении рассматриваемого транспортного средства и т.д. в блок 4 управления автономным вождением. «Целевое местоположение движения» является местоположением рассматриваемого транспортного средства, которое является целевым для рассматриваемого транспортного средства V на проезжей части движения. Когда местоположение въезда установлено, процессор 3 оценки распознавания оценивает, может ли быть выполнена смена полосы движения в направлении установленного местоположения въезда, и генерирует информацию о возможности смены полосы движения, которая является результатом оценки, возможна ли смена полосы движения, на основе результата обнаружения окружения рассматриваемого транспортного средства и информации о местоположении рассматриваемого транспортного средства. Затем целевое местоположение движения переустанавливается на основе информации о возможности смены полосы движения.
[0024] «Перекресток 100 с круговым движением» представляет собой тип перекрестка, на котором транспортное средство, движущееся по проезжей части движения, должно уступить дорогу транспортному средству, движущемуся по приоритетной проезжей части, с которой пересекается проезжая часть движения. Как показано на фиг. 2, «перекресток 100 с круговым движением» представляет собой круговой перекресток, имеющий кольцевую круговую проезжую часть 101 (область, обозначенная пунктирной линией L2, приоритетная проезжая часть), с которой соединены три или более (шесть на фиг. 3) радиальные проезжие части 110 (проезжие части движения). В частности, перекресток 100 с круговым движением представляет собой область, ограниченную пунктирной линией L1, включающую в себя круговую проезжую часть 101 и соединительные участки 102 между круговой проезжей частью 101 и радиальными проезжими частями 110.
[0025] Круглый центральный островок 103 предусмотрен в центре круговой проезжей части 101. Транспортным средствам запрещено передвигаться по центральному островку 103. По круговой проезжей части 101 транспортные средства могут проезжать в одном направлении. Направление движения по круговой проезжей части 101 является направлением по часовой стрелке в случае левостороннего движения и направлением против часовой стрелки в случае правостороннего движения. Знак 104, указывающий направление движения по круговой проезжей части 101, может быть расположен на центральном островке 103.
[0026] Соединительная часть 102 представляет собой область круговой проезжей части 101, которая имеет заданную длину в радиальном направлении наружу от границы (пунктирной линии L2) между круговой проезжей частью 101 и радиальными проезжими частями 110. Участки соединительной части 102, где транспортные средства въезжают на круговую проезжую часть 101, называются «въездами 105», а вторые участки соединительной части 102, где транспортные средства выезжают с круговой проезжей части 101, называются «выездами 106». Кроме того, в дальнейшем въезд 105, через который проходит рассматриваемое транспортное средство V при въезде на круговую проезжую часть 101, называется «въездом 105а рассматриваемого транспортного средства», а выезд 106, через который проходит рассматриваемое транспортное средство V при выезде с круговой проезжей части 101, называется «выездом 106а рассматриваемого транспортного средства».
[0027] Среди радиальных проезжих частей 110 радиальная проезжая часть, по которой движется рассматриваемое транспортное средство V при въезде на круговую проезжую часть 101, называется «въездной проезжей частью 111», а радиальная проезжая часть, по которой движется рассматриваемое транспортное средство V при выезде с круговой проезжей части 101 называется «выездной проезжей частью 112». В частности, въездная проезжая часть 111 представляет собой радиальную проезжую часть 110, имеющую въезд 105а рассматриваемого транспортного средства, а выездная проезжая часть 112 представляет собой радиальную проезжую часть 110, имеющую выезд 106а рассматриваемого транспортного средства. Въезд 105а рассматриваемого транспортного средства, выезд 106а рассматриваемого транспортного средства, въездная проезжая часть 111 и выездная проезжая часть 112 все заданы на основе целевого маршрута (маршрута движения) TR рассматриваемого транспортного средства V.
[0028] Перекресток с круговым движением 100 является перекрестком, на котором транспортные средства, движущиеся по радиальным проезжим частям 110, уступают дорогу транспортным средствам, движущимся по круговой проезжей части 101. Следовательно, на этом перекрестке 100 с круговым движением транспортные средства, которые собираются въехать на круговую проезжую часть 101, не должны препятствовать проезду транспортных средств, движущихся по круговой проезжей части 101, и когда транспортное средство на круговой проезжей части 101 движется к въезду 105, транспортное средство, въезжающее на круговую проезжую часть 101 должно останавливаться у этого въезда 105.
[0029] Разделительные островки 107, поднятые над поверхностью проезжей части между въездами 105 и выездами 106, могут быть предусмотрены на перекрестке 100 с круговым движением, как показано на фиг. 2. Разделительные островки 107 используются для разделения транспортных средств, въезжающих на круговую проезжую часть 101, и транспортных средств, выезжающих с круговой проезжей части 101. Кроме того, как показано на фиг. 2, светофоры 108 для управления въездом транспортных средств на круговую проезжую часть 101 могут быть расположены рядом с въездами 105.
[0030] Блок 4 управления автономным вождением вычисляет на основе входной информации от процессора 3 оценки распознавания значение команды движения, значение команды торможения или значение команды угла поворота рулевого колеса, которое заставляет рассматриваемое транспортное средство двигаться или останавливаться при автономном вождении согласно целевому маршруту и/или целевому местоположению движения. Результат вычисления значения команды движения выводится в исполнительный механизм 51 движения, результат вычисления значения команды торможения выводится в исполнительный механизм 52 торможения, а результат вычисления значения команды рулевого управления выводится в исполнительный механизм 53 угла поворота рулевого колеса.
[0031] Исполнительный механизм 5 является исполнительным механизмом, который заставляет рассматриваемое транспортное средство двигаться/останавливаться так, чтобы соответствовать целевому маршруту и/или целевому местоположению движения на основе команды управления, введенной из блока 4 управления автономным вождением, или чтобы заставить рассматриваемое транспортное средство, двигаться к установленному местоположению въезда. Исполнительный механизм 5 содержит исполнительный механизм 51 движения, исполнительный механизм 52 торможения и исполнительный механизм 53 угла поворота рулевого колеса.
[0032] Исполнительный механизм 51 движения представляет собой исполнительный механизм, который принимает ввод значения команды движения от блока 4 управления автономным вождением и управляет движущей силой, передаваемой на ведущие колеса. В качестве исполнительного механизма 51 движения, например, двигатель используется в случае транспортного средства с двигателем, двигатель и электродвигатель/генератор (движущая сила) используются в случае гибридного транспортного средства, а электродвигатель/генератор (движущая сила) используется в случае электромобиля.
[0033] Исполнительный механизм 52 торможения представляет собой исполнительный механизм, который принимает ввод значения команды торможения от блока 4 управления автономным движением и управляет тормозной силой, передаваемой на ведущие колеса. Например, гидроусилитель, электрический усилитель, исполнительный механизм давления тормозной жидкости, исполнительный механизм тормозного электродвигателя, электродвигатель/генератор (регенеративный) и т.д. используются в качестве исполнительного механизма 52 торможения.
[0034] Исполнительный механизм 53 угла поворота рулевого колеса представляет собой исполнительный механизм, который принимает ввод значения команды угла поворота рулевого колеса от блока 4 управления автономным вождением и управляет углом поворота управляемых колес. Электродвигатель поворота и т.д., предусмотренный в системе передачи усилия рулевого управления системы рулевого управления, используется в качестве исполнительного механизма 53 угла поворота рулевого колеса.
[0035] Устройство 7 отображения является устройством, которое отображает изображение на экране, относящееся, в частности, к тому месту, где на карте перемещается рассматриваемое транспортное средство, в то время как рассматриваемое транспортное средство остановлено или движется в автономном режиме, и предоставляет визуальную информацию, относящуюся к местоположению рассматриваемого транспортного средства, водителю и/или пассажиру. Устройство 7 отображения принимает ввод информации о целевом маршруте, информации о местоположении рассматриваемого транспортного средства, информации о пункте назначения и т.д., сгенерированные процессором 3 оценки распознавания, и отображает карту, дороги, целевой маршрут, местоположение рассматриваемого транспортного средства, пункт назначения и т.д. визуально распознаваемым образом на изображении на экране дисплея.
[0036] [Конфигурация блока управления процессора оценки распознавания]
Процессор 3 оценки распознавания снабжен блоком 31 генерации цели, блоком 32 оценки прибытия, блоком 33 определения местоположения, блоком 34 оценки полос движения, блоком 35 установки местоположения въезда и блоком 36 оценки смены полосы движения, как показано на фиг. 3.
[0037] Блок 31 генерации цели принимает ввод информации об окружении рассматриваемого транспортного средства, информации о местоположении рассматриваемого транспортного средства, информации картографических данных, информации о пункте назначения и т.д. Кроме того, блок 31 генерации цели принимает ввод информации о полосах движения, оцененной блоком 34 оценки полос движения, информации о местоположении въезда, установленной блоком 35 установки местоположения въезда, и информации о возможности смены полосы движения, оцененной блоком 36 оценки смены полосы движения. В блоке 31 генерации цели целевой маршрут, профиль целевой скорости транспортного средства, целевое местоположение движения и т.д. генерируются на основе различных частей введенной информации. Различные части целевой информации, сгенерированные блоком 31 генерации цели, выводятся в блок 32 оценки прибытия, блок 35 установки местоположения въезда и блок 4 управления автономным вождением.
[0038] Блок 32 оценки прибытия принимает ввод информации о местоположении рассматриваемого транспортного средства, информации картографических данных, информации о целевом маршруте и т.д. В блоке 32 оценки прибытия выполняется оценка, прибыло ли рассматриваемое транспортное средство V к перекрестку 100 с круговым движением. Результат оценки блоком 32 оценки прибытия и информация о целевом маршруте выводятся в блок 33 определения местоположения и блок 35 установки местоположения въезда. Оценка того, что рассматриваемое транспортное средство V прибыло к перекрестку 100 с круговым движением, выполняется в соответствии с тем, стало ли расстояние L вдоль целевого маршрута от рассматриваемого транспортного средства V до центрального местоположения по ширине на въезде 105a рассматриваемого транспортного средства (фиг. 2) равным или меньше расстояния заданного порогового значения. «Расстояние L» вычисляется на основе информации о местоположении рассматриваемого транспортного средства и информации, относящейся к перекрестку 100 с круговым движением, полученной из информации картографических данных. «Расстояние порогового значения» является расстоянием, на котором рассматриваемое транспортное средство V может выполнить по меньшей мере одну смену полосы движения до прибытия к въезду 105а рассматриваемого транспортного средства, и составляет, например, 100-300 м. «Расстояние порогового значения» может быть изменено в соответствии со скоростью движения рассматриваемого транспортного средства V.
[0039] Блок 33 определения местоположения принимает ввод результата оценки, выполненной блоком 32 оценки прибытия, информацию о целевом маршруте, информацию картографических данных и т.д. В блоке 33 определения положения определяются местоположение въезда 105a рассматриваемого транспортного средства и местоположение выезда 106a рассматриваемого транспортного средства на перекрестке 100 с круговым движением. Информация о местоположении въезда 105a рассматриваемого транспортного средства и информация о местоположении выезда 106a рассматриваемого транспортного средства, определенных блоком 33 определения местоположения, выводятся в блок 34 оценки полос движения и блок 35 установки местоположения въезда.
[0040] Блок 34 оценки полос движения принимает ввод информации о местоположении въезда 105a рассматриваемого транспортного средства из блока 33 определения местоположения, информации картографических данных и т.д. Блок 34 оценки полос движения оценивает, имеет ли въезд 105a рассматриваемого транспортного средства множество полос движения, расположенных в направлении ширины транспортного средства. Результат оценки блока 34 оценки полос движения (информация о полосах движения) выводится в блок 31 генерации цели и блок 35 установки местоположения въезда.
[0041] «Полосы движения» являются областями для проезда, которые расположены в направлении ширины транспортного средства на проезжей части движения. Например, в случаях, когда белые дорожные линии предусмотрены на поверхности проезжей части, область, которая продолжается вдоль проезжей части движения и разграничена белыми дорожными линиями, соответствует одной полосе движения. Когда множество областей, разграниченных белыми дорожными линиями, расположено в направлении ширины транспортного средства, считается, что существует «множество полос движения». В случаях, когда белые дорожные линии не предусмотрены на поверхности проезжей части движения, оценивается, что существует «множество полос движения», когда проезжая часть дороги имеет размер по ширине, который позволяет множеству транспортных средств двигаться, расположившись в направлении ширины транспортного средства. В частности, если въезд 105a рассматриваемого транспортного средства разграничен белыми дорожными линиями, оценка того, имеется ли множество полос движения, выполняется со ссылкой на белые дорожные линии в качестве ориентира. Когда въезд 105a рассматриваемого транспортного средства не разграничен белыми дорожными линиями, оценка того, имеется ли множество полос движения, выполняется со ссылкой на размер по ширине въезда 105a рассматриваемого транспортного средства.
[0042] Блок 35 установки местоположения въезда принимает ввод информации о целевом маршруте, результата оценки, выполненной блоком 32 оценки прибытия, информации о местоположении въезда 105a рассматриваемого транспортного средства и информации о местоположении выезда 106a рассматриваемого транспортного средства из блока 33 определения местоположения и результата оценки, выполненной блоком 34 оценки полосы движения. В блоке 35 установки местоположения въезда устанавливается «местоположение въезда», которое является местоположением по ширине рассматриваемого транспортного средства V на въезде 105a рассматриваемого транспортного средства, и информация о местоположении въезда генерируется на основе различных частей введенной информации. Информация о местоположении въезда, сгенерированная блоком 35 установки местоположении въезда, выводится в блок 31 генерации цели и блок 36 оценки смены полосы движения. Блок 35 установки местоположения въезда имеет блок 35a оценки состояния перекрестка с круговым движением, блок 35b оценки радиальных проезжих частей, блок 35c оценки степени скопления транспортных средств, блок 35d оценки количества полос движения, блок 35e оценки относительного местоположения и блок 35f вычисления местоположения въезда.
[0043] Блок 35a оценки состояния перекрестка с круговым движением принимает ввод результата оценки, выполненной блоком 32 оценки прибытия, информации о местоположении рассматриваемого транспортного средства, информации картографических данных, информации о целевом маршруте и т.д. В блоке 35a оценки состояния перекрестка с круговым движением перечисленные ниже факторы оцениваются в отношении перекрестка 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V:
• равен ли или больше размер внешнего диаметра круговой проезжей части 101 первого заданного значения,
• равен ли или больше размер по ширине круговой проезжей части 101 второго заданного значения,
• есть ли светофор 108 в местоположении рядом с въездом 105а рассматриваемого транспортного средства.
Результат оценки, выполненной блоком 35a оценки состояния перекрестка с круговым движением, выводится в блок 35f вычисления местоположения въезда. «Первое заданное значение» является значением, при котором возможно обеспечить расстояние движения, необходимое для рассматриваемого транспортного средства V для смены полосы движения на круговой проезжей части 101 между въездом и выездом с круговой проезжей части 101, например, 60 м. «Второе заданное значение» является значением, при котором может быть выполнена смена полосы движения на круговой проезжей части 101, например, 10 м (соответствует трем полосам движения). Кроме того, светофор 108 является светофором, который управляет въездом транспортных средств, когда транспортные средства въезжают на круговую проезжую часть 101 через въезд 105а рассматриваемого транспортного средства.
[0044] Блок 35b оценки радиальных проезжих частей принимает ввод информации о местоположении въезда 105a рассматриваемого транспортного средства, информации о местоположении выезда 106a рассматриваемого транспортного средства, информации данных карты и т.д. Блок 35b оценки радиальных проезжих частей оценивает, присутствует ли множество радиальных проезжих частей 110, соединенных с круговой проезжей частью 101, между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства на перекрестке 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V. Результат оценки, выполненной блоком 35b оценки радиальных проезжих частей, выводится в блок 35f вычисления местоположения въезда. Фраза «между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства» относится к области, расположенной между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, если смотреть вдоль направления движения по круговой проезжей части 101.
[0045] Блок 35c оценки степени скопления транспортных средств принимает ввод информации о местоположении въезда 105a рассматриваемого транспортного средства, информации о местоположении выезда 106a рассматриваемого транспортного средства, информации об окружении рассматриваемого транспортного средства, информации картографических данных и т.д. Блок 35c оценки степени скопления транспортных средств оценивает, присутствует ли радиальная проезжая часть 110, соединенная с круговой проезжей частью 101, между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства. Кроме того, вычисляется степень скопления транспортных средств, въезжающих на круговую проезжую часть 101 с радиальной проезжей части 110, присутствующей в области между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства, и оценивается величина этой степени скопления транспортных средств при въезде. Информация, необходимая при вычислении степени скопления транспортных средств при въезде (например, ситуация, когда другие транспортные средства въезжают на круговую проезжую часть 101 с радиальной проезжей части 110) может быть получена бортовым датчиком 1 или может быть получена через коммуникатор 8 внешних данных для информации VICS и т.д. Результат оценки, выполненной блоком 35c оценки степени скопления транспортных средств, выводится в блок 35f вычисления местоположения въезда. Фраза «между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства» относится к области, расположенной между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, если смотреть вдоль направления движения по круговой проезжей части 101.
[0046] Блок 35d оценки количества полос движения принимает ввод результата оценки, выполненной блоком 34 оценки полос движения, результата оценки, выполненной блоком 35a оценки состояния перекрестка с круговым движением, информации картографических данных и т.д. Блок 35d оценки количества полос движения оценивает, имеет ли въезд 105a рассматриваемого транспортного средства две полосы движения, расположенные в направлении ширины. Результат оценки, выполненной блоком 35d оценки количества полос движения, выводится в блок 35f вычисления местоположения въезда.
[0047] Блок 35e оценки относительного местоположения принимает ввод информации о местоположении въезда 105a рассматриваемого транспортного средства, информации о местоположении выезда 106a рассматриваемого транспортного средства, информации об окружении рассматриваемого транспортного средства, информации картографических данных и т.д. Блок 35e оценки относительного местоположения оценивает относительное взаимное расположение между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства. Информация об относительном местоположении, оцененная и полученная блоком 35e оценки относительного местоположения, выводится в блок 35f вычисления местоположения въезда.
Относительное взаимное расположение между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства оценивается на основе местоположения выезда 106a рассматриваемого транспортного средства относительно обращенного вперед направления въезда 105a рассматриваемого транспортного средства. В частности, блок 35e оценки относительного местоположения оценивает, присутствует ли выезд 106a рассматриваемого транспортного средства в области слева от обращенного вперед направления въезда 105a рассматриваемого транспортного средства, присутствует ли выезд 106a рассматриваемого транспортного средства в области справа от обращенного вперед направления въезда 105a рассматриваемого транспортного средства или присутствует ли выезд 106a рассматриваемого транспортного средства вдоль обращенного вперед направления въезда 105a рассматриваемого транспортного средства.
[0048] «Обращенное вперед направление въезда 105а рассматриваемого транспортного средства» является направлением (далее именуемым «обращенным вперед направлением L3»), показанным центральной линией L3, которая соединяет центральное местоположение O1 по ширине въездной проезжей части 111 и центральное местоположение O2 круговой проезжей части 101, см. фиг. 2. Фраза «выезд 106a рассматриваемого транспортного средства присутствует в области слева от обращенного вперед направления въезда 105а рассматриваемого транспортного средства» относится к случаю, в котором, если смотреть в направлении движения рассматриваемого транспортного средства V, выездная проезжая часть 112 присутствует в области слева от обращенного вперед направления L3. Фраза «выезд 106a рассматриваемого транспортного средства присутствует в области справа от обращенного вперед направления въезда 105а рассматриваемого транспортного средства» относится к случаю, в котором, если смотреть в направлении движения рассматриваемого транспортного средства V, выездная проезжая часть 112 присутствует в области слева от обращенного вперед направления L3. Кроме того, фраза «выезд 106a рассматриваемого транспортного средства присутствует вдоль обращенного вперед направления въезда 105a рассматриваемого транспортного средства» относится к состоянию, в котором обращенное вперед направление L3 и выездная проезжая часть 112 совмещены. Случай, показанный на фиг. 2, является случаем, в котором «выезд 106a рассматриваемого транспортного средства присутствует в области справа от обращенного вперед направления въезда 105a рассматриваемого транспортного средства».
[0049] Блок 35f вычисления местоположения въезда принимает ввод результата оценки, выполненной блоком 35a оценки состояния перекрестка с круговым движением, результата оценки, выполненной блоком 35b оценки радиальных проезжих частей, результата оценки, выполненной блок 35c оценки степени скопления транспортных средств, результата оценки, выполненной блоком 35d оценки количества полос движения, и информации об относительном местоположении из блока 35e оценки относительного местоположения. Блок 35f вычисления местоположения въезда устанавливает местоположение въезда, которое является местоположением по ширине рассматриваемого транспортного средства V на въезде 105a рассматриваемого транспортного средства, на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
Местоположение въезда может быть установлено блоком 35f вычисления местоположения въезда на основе относительного взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, а также может быть установлено на основе присутствия радиальных проезжих частей 110, полученного из взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
[0050] Блок 36 оценки смены полосы движения принимает ввод информации о местоположении въезда от блока 35 установки местоположения въезда, информацию об окружении рассматриваемого транспортного средства, информацию о местоположении рассматриваемого транспортного средства и т.д. На основе информации об окружении рассматриваемого транспортного средства, информации о местоположении рассматриваемого транспортного средства и т.д. блок 36 оценки смены полосы движения оценивает, может ли рассматриваемое транспортное средство V плавно выполнить смену полосы движения в направлении местоположения въезда, установленного в блоке 35 установки местоположения въезда перед прибытием к въезду 105а рассматриваемого транспортного средства. Информация о возможности смены полосы движения, сгенерированная блоком 36 оценки смены полосы движения, выводится в блок 31 генерации цели. Случаи, в которых выполнение плавной смены полосы движения невозможно, включают, например, случаи, в которых рядом с основным транспортным средством V находится другое транспортное средство, случаи, в которых другое транспортное средство находится в целевом местоположении движения и т.д.
[0051] [Конфигурация процесса для управления помощью при вождении]
На фиг.4 представлена блок-схема последовательности операций управления помощью при вождении. Этапы на фиг. 4 описаны ниже.
[0052] На этапе S1 целевой маршрут и т.д. генерируется на основе информации об окружении рассматриваемого транспортного средства, информации о местоположении рассматриваемого транспортного средства, информации картографических данных, целевого пункта назначения и т.д., и процесс переходит на этап S2. Этап S1 соответствует блоку 31 генерации цели.
[0053] На этапе S2, в продолжение генерации целевого маршрута и т.д. на этапе S1, информацию о местоположении рассматриваемого транспортного средства и информацию об окружении рассматриваемого транспортного средства получают от бортового датчика 1 во время движения, и процесс переходит на этап S3.
[0054] На этапе S3, в продолжение получения информации о местоположении рассматриваемого транспортного средства и информации об окружении рассматриваемого транспортного средства на этапе S2, выполняется оценка, стало ли расстояние от рассматриваемого транспортного средства V до перекрестка 100 с круговым движением равным или меньшее, чем расстояние порогового значения, или, в частности, прибыло ли рассматриваемое транспортное средство V к перекрестку 100 с круговым движением. Когда оценкой является ДА (прибыло к перекрестку с круговым движением), процесс переходит на этап S4. Когда оценкой является НЕТ (не прибыло к перекрестку с круговым движением), процесс возвращается на этап S1.
Расстояние от рассматриваемого транспортного средства V до перекрестка 100 с круговым движением оценивается на основе информации о местоположении рассматриваемого транспортного средства, информации картографических данных и т.д. Этап S3 соответствует блоку 32 оценки прибытия.
[0055] На этапе S4, в продолжение оценки на этапе S3 того, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, информацию, относящуюся к перекрестку 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V, получают из информации о целевом маршруте, информации о местоположении рассматриваемого транспортного средства, информации о картографических данных и т.д., и процесс переходит на этап S5.
«Информация, относящаяся к перекрестку 100 с круговым движением» является различными фрагментами информации, необходимыми для определения местоположения въезда 105a рассматриваемого транспортного средства и местоположения выезда 106a рассматриваемого транспортного средства или для установки местоположения въезда, например, информацией о местоположении въезда 105a рассматриваемого транспортного средства, информацией о местоположении выезда 106a рассматриваемого транспортного средства, информацией о размере внешнего диаметра круговой проезжей части 101, информацией о размерах по ширине круговой проезжей части 101, информацией об установке светофоров рядом с въездом, информацией о местоположении радиальных проезжих частей 110 и ситуациями других транспортных средств, движущихся по радиальным проезжим частям 110. Этап S4 соответствует блоку 33 определения местоположения.
[0056] На этапе S5, в продолжение получения информации о круговом перекрестке на этапе S4, выполняется оценка, может ли рассматриваемое транспортное средство V въехать на круговую проезжую часть 101 без остановки на въезде 105a рассматриваемого транспортного средства, при этом оценка выполняется на основе информации о местоположении рассматриваемого транспортного средства, информации об окружении рассматриваемого транспортного средства и т.д. Когда оценкой является ДА (можно въехать на круговую проезжую часть без остановки), процесс переходит на этап S13. Когда оценкой является НЕТ (невозможно въехать на проезжую часть без остановки), процесс переходит на этап S6.
Фраза «можно въехать на круговую проезжую часть без остановки» относится к случаям, когда никакого впереди идущего транспортного средства не присутствует на въезде 105a рассматриваемого транспортного средства, и никакое другое транспортное средство, направляющееся к въезду 105a рассматриваемого транспортного средства, не присутствует на круговой проезжей части 101. Даже если впереди идущее транспортное средство присутствует на въезде 105а рассматриваемого транспортного средства во время вычисления, оценивается, что «никакого впереди идущего транспортного средства не присутствует на въезде 105а рассматриваемого транспортного средства», если можно предсказать, что впереди идущее транспортное средство въедет на круговую проезжую часть 101 перед тем, как рассматриваемое транспортное средство V прибудет к въезду 105а рассматриваемого транспортного средства.
[0057] На этапе S6, в продолжение оценки на этапе S5 того, что рассматриваемое транспортное средство не может въехать на круговую проезжую часть без остановки, выполняется оценка, имеет ли въезд 105a рассматриваемого транспортного средства, через который проезжает рассматриваемое транспортное средство V при въезде на круговую проезжую часть 101, множество полос движения, расположенных в направлении ширины. Когда оценкой является ДА (имеется множество полос движения), процесс переходит на этап S7. Когда оценкой является НЕТ (имеется одна полоса движения), процесс переходит на этап S13.
Полосы движения въезда 105a рассматриваемого транспортного средства оцениваются на основе информации о местоположении въезда 105a рассматриваемого транспортного средства, информации картографических данных, данных изображения, полученных камерой 11, и т.д. Этап S6 соответствует блоку 34 оценки полос движения.
[0058] На этапе S7, в продолжение оценки на этапе S6 того, что въезд 105a рассматриваемого транспортного средства имеет множество полос движения, выполняется управление установкой местоположения въезда, устанавливается «местоположение въезда», при этом местоположение въезда является местоположением по ширине рассматриваемого транспортного средства V на въезде 105a рассматриваемого транспортного средства, определяется полоса движения, на которой установлено местоположение въезда, и процесс переходит на этап S8.
Управление установкой местоположения въезда является процессом, в котором определяются местоположение въезда 105a рассматриваемого транспортного средства и местоположение выезда 106a рассматриваемого транспортного средства, и местоположение въезда устанавливается на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства. Это управление установкой местоположения въезда включает в себя первое управление установкой местоположения въезда, показанное на фиг. 5, второе управление установкой местоположения въезда, показанное на фиг. 6, третье управление установкой местоположения въезда, показанное на фиг. 7, и четвертое управление установкой местоположения въезда, показанное на фиг. 8. Первое, второе и третье управления установкой местоположения въезда выполняется параллельно. Четвертое управление установкой местоположения въезда выполняется, когда в результате выполнения первого, второго и третьего управлений установкой местоположения въезда во всех процессах был выбран этап для выполнения четвертого управления установкой местоположения въезда. Этап S7 соответствует блоку 35 установки местоположения въезда.
[0059] На этапе S8, в продолжение установки местоположения въезда на этапе S7, выполняется оценка, было ли местоположение въезда, установленное на этапе S7, установлено на полосе движения (другой полосе движения), отличной от полосы движения рассматриваемого транспортного средства. Когда оценкой является ДА (местоположение въезда установлено на другой полосе движения), процесс переходит на этап S9. Когда оценкой является НЕТ (местоположение въезда установлено на полосе движения рассматриваемого транспортного средства), процесс переходит на этап S13.
«Полоса движения рассматриваемого транспортного средства» является полосой движения, совпадающей с продолжающейся линией, которая проходит вдоль проезжей части движения от текущего местоположения рассматриваемого транспортного средства V. Взаимное расположение между полосой движения рассматриваемого транспортного средства и местоположением въезда, установленным на этапе S7, оценивается на основе информация о местоположении рассматриваемого транспортного средства, информация о местоположении въезда и т.д.
[0060] На этапе S9, в продолжение оценки на этапе S8 того, что местоположение въезда установлено на другой полосе движения, выполняется оценка, может ли быть выполнена смена полосы движения в направлении местоположения въезда. Когда оценкой является ДА (смена полосы движения возможна), процесс переходит на этап S10. Когда оценкой является НЕТ (смена полосы движения невозможна), процесс переходит на этап S13.
Оценка, можно ли выполнить смену полосы движения, выполняется на основе информации о местоположении въезда, присутствия соседних транспортных средств, полученной из такой информации, как информация об окружении рассматриваемого транспортного средства и информации о местоположении рассматриваемого транспортного средства, ситуации окружения рассматриваемого транспортного средства например, расстояния до въезда 105a рассматриваемого транспортного средства и ситуации рассматриваемого транспортного средства. «Смена полосы движения в направлении местоположения въезда» является сменой полосы движения, при которой рассматриваемое транспортное средство V вынуждено переместиться в полосу движения, в которой местоположение въезда, установленное на этапе S7, было установлено (полоса движения, по которой рассматриваемое транспортное средство будет двигаться, чтобы прибыть к местоположению въезда, далее именуемая «целевая полоса движения»).
[0061] На этапе S10, в продолжение оценки на этапе S9 того, что смена полосы движения возможна, выполнение управления сменой полосы движения разрешается, и процесс переходит на этап S11. Этапы S9 и S10 соответствуют блоку 36 оценки смены полосы движения.
[0062] На этапе S11, в продолжение разрешения выполнения управления сменой полосы движения на этапе S10, выполняется управление сменой полосы движения, и процесс переходит на этап S12.
При «управлении сменой полосы движения» процессор 3 оценки распознавания генерирует целевое местоположение движения, в которое рассматриваемое транспортное средство V направляется по целевой полосе движения из текущего местоположения, и выводит информацию о целевом местоположении движения в блок 4 управления автономным вождением. Блок 4 управления автономным вождением генерирует значение команды для выполнения автономного вождения в соответствии с целевым местоположением движения на основе информации о целевом местоположении движения и выводит это значение команды в исполнительный механизм 5. Затем исполнительный механизм 5 заставляет рассматриваемое транспортное средство V двигаться/останавливаться для совмещения с целевым местоположением движения. Это управление сменой полосы движения является хорошо известным управлением и поэтому описываться подробно не будет.
[0063] На этапе S12, в продолжение выполнения управления сменой полосы движения на этапе S11, выполняется оценка того, завершено ли управление сменой полосы движения. Когда оценкой является ДА (управление завершено), процесс переходит на этап S13. Когда оценкой является НЕТ (управление продолжается), процесс возвращается на этап S9.
Оценка того, что «управление сменой полосы движения завершено», выполняется вследствие того, что рассматриваемое транспортное средство V переместилось в целевую полосу движения.
[0064] На этапе S13, в продолжение оценки на этапе S5 того, что рассматриваемое транспортное средство может въехать на круговую проезжую часть без остановки, оценки на этапе S6 того, что въезд 105a рассматриваемого транспортного средства является одной полосой движения, оценки на этапе S8 того, что местоположение въезда находится в полосе движения рассматриваемого транспортного средства, оценки на этапе S9 того, что смена полосы движения в направлении местоположения въезда невозможна, или оценки на этапе S12 того, что управление сменой полосы движения закончилось, движение по полосе движения рассматриваемого транспортного средства сохраняется, и процесс переходит на этап S14.
[0065] На этапе S14, в продолжение сохранения движения по полосе движения рассматриваемого транспортного средства на этапе S13, выполняется оценка, прибыло ли рассматриваемое транспортное средство к въезду 105а рассматриваемого транспортного средства, который является границей между круговой проезжей частью 101 и въездной проезжей частью 111. Когда оценкой является ДА (прибыло к въезду), процесс переходит на этап S15. Когда оценкой является НЕТ (не прибыло к въезду), процесс возвращается на этап S13.
Оценка того, что рассматриваемое транспортное средство V прибыло к въезду 105a рассматриваемого транспортного средства, выполняется вследствие того, что расстояние от рассматриваемого транспортного средства V до въезда 105a рассматриваемого транспортного средства было оценено как равное или меньше заданного расстояния на основании информации о местоположении рассматриваемого транспортного средства, информации картографических данных и т.д.
[0066] На этапе S15, в продолжение оценки на этапе S14 того, что рассматриваемое транспортное средство прибыло к въезду, выполняется управление движением по перекрестку с круговым движением, и процесс переходит на КОНЕЦ. Управление движением по перекрестку с круговым движением является управлением, при котором при автономном вождении на основе информации об окружении рассматриваемого транспортного средства и информации о местоположении рассматриваемого транспортного средства, полученных от бортового датчика 1, информации о целевом маршруте и т.д. рассматриваемое транспортное средство въезжает на круговую проезжую часть 101 через въезд 105a рассматриваемого транспортного средства, движется по круговой проезжей части 101, а затем выезжает с круговой проезжей части 101 через выезд 106a рассматриваемого транспортного средства и проходит по перекрестку 100 с круговым движением. Это управление движением по перекрестку с круговым движением является хорошо известным управлением и поэтому описываться подробно не будет.
[0067] [Конфигурация процесса для первого управления установкой местоположения въезда]
На фиг. 5 представлена блок-схема последовательности операций первого управления установкой местоположения въезда. Этапы на фиг. 5 описаны ниже.
[0068] На этапе S101 выполняется оценка, равен ли или больше размер внешнего диаметра круговой проезжей части 101, чем первое заданное значение, на перекрестке 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V. Когда оценкой является ДА (размер внешнего диаметра круговой проезжей части равен или больше первого заданного значения), процесс переходит на этап S104. Когда оценкой является НЕТ (размер внешнего диаметра круговой проезжей части меньше первого заданного значения), процесс переходит на этап S102.
«Первое заданное значение» является значением, при котором расстояние движения, необходимое для смены полосы движения на круговой проезжей части 101, может быть обеспечено с момента времени, когда рассматриваемое транспортное средство V въезжает на круговую проезжую часть 101, до тех пор, пока рассматриваемое транспортное средство не выедет с круговой проезжей части. Размер внешнего диаметра круговой проезжей части 101 оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при вождении.
[0069] На этапе S102, в продолжение оценки на S101 того, что размер внешнего диаметра круговой проезжей части меньше, чем первое заданное значение, выполняется оценка на основе информации картографических данных относительно того, равен ли или больше размер по ширине круговой проезжей части 101, чем второе заданное значение, на перекрестке 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V. Когда оценкой является ДА (размер по ширине круговой проезжей части равен или больше второго заданного значения), процесс переходит на этап S104. Когда оценкой является НЕТ (размер по ширине круговой проезжей части меньше второго заданного значения), процесс переходит на этап S103.
«Второе заданное значение» является значением, при котором рассматриваемое транспортное средство V может выполнить смену полосы движения на круговой проезжей части 101. Величина размера по ширине круговой проезжей части 101 оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при вождении.
[0070] На этапе S103, в продолжение оценки на этапе S102 того, что размер внешнего диаметра круговой проезжей части меньше второго заданного значения, выполняется оценка на основе информации картографических данных относительно того, обеспечен ли светофор 108, управляющий въездом транспортных средств на круговую проезжую часть 101 в местоположении рядом с въездом 105а рассматриваемого транспортного средства. Когда оценкой является ДА (есть светофор), процесс переходит на этап S104. Когда оценкой является НЕТ (нет светофора), процесс переходит на этап S106.
Наличие или отсутствие светофора 108 оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при вождении. Этапы S101, S102 и S103 соответствуют блоку 35a оценки состояния перекрестка с круговым движением.
[0071] На этапе S104, в продолжение оценки на этапе S101 того, что размер внешнего диаметра круговой проезжей части воздуха равен или больше первого заданного значения, оценки на этапе S102 того, что размер по ширине круговой проезжей части равен или больше, чем второе заданное значение или оценки на этапе S103 того, что имеется светофор, выполняется оценка на основе относительного взаимного расположения между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства, относительно того, присутствует ли выезд 106a рассматриваемого транспортного средства в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства. Когда оценкой является ДА (выезд находится в обращенном вперед направлении), процесс переходит на этап S105. Когда оценкой является НЕТ (выезд не находится в обращенном вперед направлении), процесс переходит на этап S106. Этап S104 соответствует блоку 35e оценки относительного местоположения.
Состояние, в котором «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства», представляет собой состояние, в котором выездная проезжая часть 112 и обращенное вперед направление L3 въезда 105a рассматриваемого транспортного средства совмещены. Если обращенное вперед направление L3 въезда 105a рассматриваемого транспортного средства совмещено с частью выездной проезжей части 112, выполнена оценка «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства». И наоборот, состояние, в котором «указатель 6 поворота отсутствует в обращенном вперед направлении въезда 105а рассматриваемого транспортного средства», представляет собой состояние, в котором выездная проезжая часть 112 присутствует в области слева или справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства, как видно в направлении движения рассматриваемого транспортного средства V. Кроме того, относительное взаимное расположение между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при вождении.
[0072] На этапе S105, в продолжение оценки на этапе S104 того, что «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства», местоположение въезда устанавливается на полосе движения рассматриваемого транспортного средства и процесс переходит на КОНЕЦ. Этап S105 соответствует блоку 35f вычисления местоположения въезда.
[0073] На этапе S106, в продолжение либо оценки на этапе S103 того, что светофор отсутствует, либо оценки на этапе S104 того, что «выезд 106a рассматриваемого транспортного средства не присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства» выбирается выполнение четвертого управления установкой местоположения въезда, и процесс переходит на КОНЕЦ.
[0074] [Конфигурация процесса для второго управления установкой местоположения въезда]
На фиг. 6 представлена блок-схема последовательности операций второго управления установкой местоположения въезда. Этапы на фиг. 6 описаны ниже.
[0075] На этапе S201 выполняется оценка, существует ли множество радиальных проезжих частей 110, соединенных с круговой проезжей частью 101 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства на перекрестке 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V. Когда оценкой является ДА (имеется множество радиальных проезжих частей), процесс переходит на этап S202. Когда оценкой является НЕТ (нет множества радиальных проезжих частей), процесс переходит на этап S205. Этап S201 соответствует блоку 35b оценки радиальных проезжих частей.
Наличие или отсутствие множества радиальных проезжих частей 110 между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при вождении.
[0076] На этапе S202, в продолжение оценки на этапе S201 того, что существует множество радиальных проезжих частей, выполняется оценка, является ли направление движения на круговой проезжей части 101 направлением по часовой стрелке. Когда оценкой является ДА (направление является направлением по часовой стрелке), процесс переходит на этап S203. Когда оценкой является НЕТ (направление является направлением против часовой стрелки), процесс переходит на этап S204.
[0077] На этапе S203, в продолжение оценки на этапе S202 того, что направление движения по круговой проезжей части 101 является направлением по часовой стрелке, местоположение въезда устанавливается на полосе справа от крайней левой полосы движения, и процесс переходит на КОНЕЦ.
Крайняя левая полоса движения является полосой движения, расположенной дальше всего слева, если смотреть в направлении движения на въезде 105а рассматриваемого транспортного средства. На этом этапе S203 местоположение въезда предпочтительно устанавливается в полосе движения справа от крайней левой полосы движения, и, следовательно, местоположение въезда устанавливается в правой полосе движения, когда въезд 105a рассматриваемого транспортного средства имеет две полосы движения. Когда, например, въезд 105a рассматриваемого транспортного средства имеет три полосы движения, местоположение въезда устанавливается либо на центральной полосе движения, либо на крайней правой полосе движения.
[0078] В нижеследующем описании, когда имеется множество полос движения, на которых может быть установлено местоположение въезда, например, выбирается полоса движения, совпадающая с полосой движения рассматриваемого транспортного средства, выбирается полоса движения, имеющая большое расстояние для проезда до впереди идущего транспортного средства (имеется несколько впереди идущих транспортных средств, расположенных вдоль полосы движения), или выбирается полоса движения, смежная с полосой движения рассматриваемого транспортного средства.
[0079] На этапе S204, в продолжение оценки на этапе S202 того, что направление движения по круговой проезжей части 101 является направлением против часовой стрелки, местоположение въезда устанавливается на полосе слева от крайней правой полосы движения, и процесс переходит на КОНЕЦ. Крайняя правая полоса движения является полосой движения, расположенной дальше всего справа, если смотреть в направлении движения на въезде 105а рассматриваемого транспортного средства. На этом этапе S204 местоположение въезда предпочтительно устанавливается в полосе движения слева от крайней правой полосы движения, и, следовательно, местоположение въезда устанавливается в левой полосе движения, когда въезд 105a рассматриваемого транспортного средства имеет две полосы движения. Когда, например, въезд 105a рассматриваемого транспортного средства имеет три полосы движения, местоположение въезда устанавливается либо на центральной полосе движения, либо на крайней левой полосе движения. Этапы S203 и S204 соответствуют блоку 35f вычисления местоположения въезда.
[0080] На этапе S205, в продолжение оценки на этапе S201 того, что не существует множества радиальных проезжих частей, выбирается выполнение четвертого управления установкой местоположения въезда, и процесс переходит на КОНЕЦ.
[0081] [Конфигурация процесса для третьего управления установкой местоположения въезда]
На фиг. 7 представлена блок-схема последовательности операций третьего управления установкой местоположения въезда. Этапы на фиг. 7 описаны ниже.
[0082] На этапе S301 выполняется оценка на основе информации картографических данных относительно того, существует ли радиальная проезжая часть 110, соединенная с круговой проезжей частью 101 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства на перекрестке 100 с круговым движением, к которому прибыло рассматриваемое транспортное средство V. Когда оценкой является ДА (существует радиальная проезжая часть), процесс переходит на этап S302. Когда оценкой является НЕТ (не существует радиальная проезжая часть), процесс переходит на этап S307.
Наличие или отсутствие радиальной проезжей части 110 между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при вождении.
[0083] На этапе S302, в продолжение оценки на этапе S301 того, что существует радиальная проезжая часть, вычисляется степень скопления транспортных средств (степень скопления транспортных средств на въезде), которая представляет собой степень скопления других транспортных средств, въезжающих на круговую проезжую часть 101 с радиальной проезжей части 110 между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, и процесс переходит на этап S303.
«Степень скопления транспортных средств на въезде» рассчитывается, например, на основе количества транспортных средств, въезжающих в единицу времени, количества транспортных средств на радиальной проезжей части 110 на единицу расстояния и т.д. Информацию, необходимую для вычисления степени скопления транспортных средств на въезде, получают бортовым датчиком 1 и/или коммуникатором 8 внешний данных.
[0084] На этапе S303, в продолжение вычисления степени скопления транспортных средств на въезде на этапе S302, выполняется оценка, равна ли или больше степень скопления транспортных средств на въезде, чем пороговое значение, в частности, существует ли высокая степень скопления транспортных средств на въезде на радиальной проезжей части 110 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства. Когда оценкой является ДА (существует высокая степень скопления транспортных средств на въезде), процесс переходит на этап S304. Когда оценкой является НЕТ (существует малая степень скопления транспортных средств на въезде), процесс переходит на этап S307. Этапы S301, S302 и S303 соответствуют блоку 35c оценки степени скопления транспортных средств.
[0085] На этапе S304, в продолжение оценки на этапе S303 того, что существует высокая степень скопления транспортных средств на въезде, выполняется оценка, является ли направление движения на круговой проезжей части 101 направлением по часовой стрелке. Когда оценкой является ДА (направление является направлением по часовой стрелке), процесс переходит на этап S305. Когда оценкой является НЕТ (направление является направлением против часовой стрелки), процесс переходит на этап S306.
[0086] На этапе S305, в продолжение оценки на этапе S304 того, что направление движения по круговой проезжей части 101 является направлением по часовой стрелке, местоположение въезда устанавливается на полосе справа от крайней левой полосы движения, и процесс переходит на КОНЕЦ.
На этом этапе S305 местоположение въезда предпочтительно устанавливается в полосе движения справа от крайней левой полосы движения, и, следовательно, местоположение въезда устанавливается в правой полосе движения, когда въезд 105a рассматриваемого транспортного средства имеет две полосы движения. Когда, например, въезд 105a рассматриваемого транспортного средства имеет три полосы движения, местоположение въезда устанавливается либо на центральной полосе движения, либо на крайней правой полосе движения.
[0087] На этапе S306, в продолжение оценки на этапе S304 того, что направление движения по круговой проезжей части 101 является направлением против часовой стрелки, местоположение въезда устанавливается на полосе слева от крайней правой полосы движения, и процесс переходит на КОНЕЦ. На этом этапе S306 местоположение въезда предпочтительно устанавливается в полосе движения слева от крайней правой полосы движения, и, следовательно, местоположение въезда устанавливается в левой полосе движения, когда въезд 105a рассматриваемого транспортного средства имеет две полосы движения. Когда, например, въезд 105a рассматриваемого транспортного средства имеет три полосы движения, местоположение въезда устанавливается либо на центральной полосе движения, либо на крайней левой полосе движения. Этапы S305 и S306 соответствуют блоку 35f вычисления местоположения въезда.
[0088] На этапе S307, в продолжение либо оценки, что отсутствуют радиальные проезжие части на этапе S301, либо оценки того, что существует малое скопление транспортных средств на въезде на этапе S303, выбирается выполнение четвертого управления установкой местоположения въезда, и процесс переходит на КОНЕЦ.
[0089] [Конфигурация процесса для четвертого управления установкой местоположения въезда]
На фиг. 8 представлена блок-схема последовательности операций четвертого управления установкой местоположения въезда. Этапы на фиг. 8 описаны ниже.
[0090] На этапе S401 выполняется оценка того, имеет ли въезд 105a рассматриваемого транспортного средства две полосы движения, расположенные в направлении ширины. Когда оценкой является ДА (две полосы), процесс переходит на этап S402. Когда оценкой является НЕТ (три или более полос), процесс переходит на этап S405. Этап S401 соответствует блоку 35d оценки количества полос движения.
[0091] На этапе S402, в продолжение оценки на этапе S401 того, что въезд 105a рассматриваемого транспортного средства представляет собой две полосы движения, выполняется оценка на основе относительного взаимного расположения между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства, присутствует ли выезд 106a рассматриваемого транспортного средства в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства. Когда оценкой является ДА (выезд справа от обращенного вперед направления), процесс переходит на этап S403. Когда оценкой является НЕТ (выезд слева от обращенного вперед направления или в обращенном вперед направлении), процесс переходит на этап S404.
Относительное взаимное расположение между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при движении.
[0092] На этапе S403, в продолжение оценки на этапе S402 того, что «выезд 106a рассматриваемого транспортного средства присутствует справа от обращенного вперед направления въезда 105a рассматриваемого транспортного средства», местоположение въезда устанавливается на правой полосе движения и процесс переходит на КОНЕЦ.
[0093] На этапе S404, в продолжение оценки на этапе S402 того, что «выезд 106a рассматриваемого транспортного средства присутствует слева от обращенного вперед направления въезда 105a рассматриваемого транспортного средства или в обращенном вперед направлении», местоположение въезда устанавливается на левой полосе движения и процесс переходит на КОНЕЦ.
[0094] На этапе S405, в продолжение оценки на этапе S401 того, что въезд 105a рассматриваемого транспортного средства представляет собой три или более полосы движения, выполняется оценка на основе относительного взаимного расположения между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства, присутствует ли выезд 106a рассматриваемого транспортного средства в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства. Когда оценкой является ДА (выезд справа от обращенного вперед направления), процесс переходит на этап S406. Когда оценкой является НЕТ (выезд слева от обращенного вперед направления или в обращенном вперед направлении), процесс переходит на этап S407. Относительное взаимное расположение между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при движении.
[0095] На этапе S406, в продолжение оценки на этапе S405 того, что «выезд 106a рассматриваемого транспортного средства присутствует справа от обращенного вперед направления въезда 105a рассматриваемого транспортного средства», местоположение въезда устанавливается на крайней правой полосе движения и процесс переходит на КОНЕЦ.
[0096] На этапе S407, в продолжение оценки на этапе S405, что «выезд 106a рассматриваемого транспортного средства присутствует слева от обращенного вперед направления въезда 105a рассматриваемого транспортного средства или в обращенном вперед направлении», выполняется оценка, присутствует ли выезд 106a рассматриваемого транспортного средства в области слева от обращенного вперед направления L3, въезда 105a рассматриваемого транспортного средства. Когда оценкой является ДА (выезд слева от обращенного вперед направления), процесс переходит на этап S408. Когда оценкой является НЕТ (выезд находится в обращенном вперед направлении), процесс переходит на этап S409. Этапы S402, S405 и S407 соответствуют блоку 35e оценки относительного местоположения.
Относительное взаимное расположение между выездом 106a рассматриваемого транспортного средства и въездом 105a рассматриваемого транспортного средства оценивается с использованием информации о перекрестке с круговым движением, полученной на этапе S4 управления помощью при движении.
[0097] На этапе S408, в продолжение оценки на этапе S407 того, что «выезд 106a рассматриваемого транспортного средства присутствует слева от обращенного вперед направления въезда 105a рассматриваемого транспортного средства», местоположение въезда устанавливается на крайней левой полосе движения и процесс переходит на КОНЕЦ.
[0098] На этапе S409, в продолжение оценки на этапе S407 того, что «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства», местоположение въезда устанавливается на полосе движения между крайней левой полосой движения и крайней правой полосой движения, и процесс переходит на КОНЕЦ. Этапы S403, S404, S406, S408 и S409 соответствуют блоку 35f вычисления местоположения въезда.
[0099] Далее действия способа помощи при вождении и устройства помощи при вождении первого варианта осуществления будут описаны для каждого сценария движения. Приведенные ниже описания предполагают в качестве принципов, что движение происходит с левой стороны, а направление движения по круговой проезжей части 101 является направлением по часовой стрелке.
[0100] [Сценарий движения, при котором не требуется установка местоположения въезда]
Пока рассматриваемое транспортное средство V движется, процессор 3 оценки распознавания выполняет управление помощи при вождении, показанное на фиг. 4. В частности, процессор 3 оценки распознавания выполняет процесс от этапа S1 до этапов S2 и S3, показанных на фиг. 4, после чего генерируется целевой маршрут и т.д., и получается информация о местоположении рассматриваемого транспортного средства и информация об окружении рассматриваемого транспортного средства.
[0101] Когда рассматриваемое транспортное средство V приближается к перекрестку 100 с круговым движением, присутствующему на проезжей части движения, и оценка прибытия к перекрестку с круговым движением является положительной в процессе на этапе S3, процессор 3 оценки распознавания выполняет процесс с этапа S4 по этап S5 и получает информацию, относящуюся к перекрестку 100 с круговым движением, к которому, по оценкам, прибыло рассматриваемое транспортное средство V. Кроме того, выполняется оценка, может ли рассматриваемое транспортное средство V выехать на круговую проезжую часть 101 без остановки на въезде 105а рассматриваемого транспортного средства.
[0102] В случаях, когда никакое впереди идущее транспортное средство не присутствует на въезде 105a рассматриваемого транспортного средства и никакое другое транспортное средство, направляющееся к въезду 105a рассматриваемого транспортного средства, не присутствует на круговой проезжей части 101, считается, что возможно въехать на круговую проезжую часть 101 без остановка у въезда 105a рассматриваемого транспортного средства, и выполняется процесс от этапа S13 до этапов S14 и S15. В частности, процессор 3 оценки распознавания генерирует целевое местоположение движения, к которому рассматриваемое транспортное средство V должно продолжать движение по полосе движения (полосе движения рассматриваемого транспортного средства), по которой рассматриваемое транспортное средство V движется в текущий момент времени (например, время, в которое рассматриваемое транспортное средство V было оценено как прибывшее к перекрестку 100 с круговым движением) до тех пор пока не прибудет к местоположению въезда. Таким образом, рассматриваемое транспортное средство V продолжает движение по полосе движения рассматриваемого транспортного средства, пока не прибудет к местоположению въезда. По прибытии к въезду 105a рассматриваемого транспортного средства выполняется управление движением по перекрестку с круговым движением, и рассматриваемое транспортное средство V проезжает по перекрестку 100 с круговым движением при автономном вождении посредством общеизвестного управления.
[0103] Когда, например, впереди идущее транспортное средство присутствует на въезде 105a рассматриваемого транспортного средства или другое транспортное средство, направляющееся к въезду 105a рассматриваемого транспортного средства, присутствует на круговой проезжей части 101, в процессе на этапе S5 оценивается, что «невозможно въехать на круговую проезжую часть 101 без остановки (необходимо остановиться у въезда 105а рассматриваемого транспортного средства)». Выполняется процесс на этапе S6, и оценивается, является ли въезд 105a рассматриваемого транспортного средства множеством полос движения.
[0104] В этом случае, когда въезд 105a рассматриваемого транспортного средства является одной полосой движения, местоположение въезда обязательно устанавливается на полосе движения рассматриваемого транспортного средства. Следовательно, выполнение управления установкой местоположения въезда не требуется, процесс переходит от этапа S6 на этап S13, S14 и S15, и движение по полосе движения рассматриваемого транспортного средства продолжается, после чего выполняется управление движением по перекрестку с круговым движением.
[0105] [Сценарий движения, при котором местоположение въезда должно быть установлено]
В отличие от вышеприведенного, в случае, когда въезд 105a рассматриваемого транспортного средства имеет множество из двух или более полос движения, выполняется процесс на этапе S7 и выполняется управление установкой местоположения въезда. В частности, на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства процессор 3 оценки распознавания устанавливает «местоположение въезда», которое является местоположением по ширине рассматриваемого транспортного средства V на въезде 105a рассматриваемого транспортного средства, и также устанавливает целевую полосу движения, на которой устанавливается это местоположение въезда. При управлении установкой местоположения въезда первое, второе и третье управления установкой местоположения въезда, показанные на фиг. 5-7 выполняются параллельно. Когда во всех этих процессах достигнут этап выбора выполнения четвертого управления установкой местоположения въезда, выполняется четвертое управление установкой местоположения въезда, показанное на фиг. 8.
[0106] В результате выполнения управления установкой местоположения въезда, когда «местоположение въезда» и целевая полоса движения установлены, выполняется процесс на этапе S8, и выполняется оценка того, было ли установлено установленное местоположение въезда на полосе движения, отличной от полосы движения рассматриваемого транспортного средства, или, в частности, является ли целевая полоса движения другой полосой движения. Когда целевая полоса движения и полоса движения рассматриваемого транспортного средства совпадают, смена полосы движения считается ненужной, процесс переходит с этапа S8 на этапы S13, S14 и S15, и движение по полосе движения рассматриваемого транспортного средства продолжается, после чего выполняется управление движением по перекрестку с круговым движением.
[0107] Когда целевая полоса движения и полоса движения рассматриваемого транспортного средства не совпадают, смена полосы движения в направлении местоположения въезда считается необходимым, выполняется процесс на этапе S9, и выполняется оценка, может ли быть выполнена смена полосы движения в направлении местоположения въезда. На основании присутствия соседнего транспортного средства, расстояния до въезда 105a рассматриваемого транспортного средства и других аспектов окружения рассматриваемого транспортного средства, когда смена полосы движения оценена как невозможная, смена полосы движения считается невозможной, процесс переходит от этапа S9 к этапам S13, S14 и S15, и движение по полосе движения рассматриваемого транспортного средства продолжается, после чего выполняется управление движением по перекрестку с круговым движением.
[0108] И наоборот, в процессе на этапе S9, когда смена полосы движения была оценена как возможная, процессы этапов S10 и S11 выполняются по порядку, выполнение управления сменой полосы движения разрешается, и управление сменой полосы движения выполняется. Когда в процессе на этапе S12 оценено управление сменой полосы движения как завершенное, процесс переходит к этапам S13, S14 и S15, и движение по полосе движения рассматриваемого транспортного средства продолжается, после чего выполняется управление движением по перекрестку с круговым движением. Когда было оценено, что смена полосы движения невозможна во время выполнения управления сменой полосы движения, выполнение управления сменой полосы движения приостанавливается и выполняется процесс на этапах S13, S14 и S15.
[0109] Действие по установке целевой полосы движения в способе помощи при вождении и в устройстве помощи при вождении будет описано в каждом из сценариев движения.
[0110] [Сценарий, в котором размер внешнего диаметра круговой проезжей части является первым заданным значением или больше, а выезд рассматриваемого транспортного средства находится в обращенном вперед направлении въезда рассматриваемого транспортного средства]
Рассматривается случай, в котором, когда управление установкой местоположения въезда выполняется в процессоре 3 оценки распознавания, размер внешнего диаметра круговой проезжей части 101 (именуемый ниже «размер R1 внешнего диаметра круговой проезжей части») равен или больше, чем первое заданное значение на перекрестке 100A с круговым движением, показанном на фиг. 9. В этом случае размер внешнего диаметра круговой проезжей части оценивается как равный или превышающий первое пороговое значение в процессе на этапе S101 первого управления установкой местоположения въезда, показанного на фиг. 5, и выполняется процесс на этапе S104. В сценарии движения, показанном на фиг. 9, выездная проезжая часть 112 совмещается с обращенным вперед направлением L3 въезда 105а рассматриваемого транспортного средства, и выполняется оценка «выезд 106а рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105а рассматриваемого транспортного средства». Следовательно, выполняется процесс на этапе S105, и местоположение въезда устанавливается на полосе движения рассматриваемого транспортного средства. В частности, в примере, показанном на фиг. 9, в котором въездная проезжая часть 111 является двумя полосами движения, местоположение въезда устанавливается на правой полосе 111R движения, когда рассматриваемое транспортное средство V движется по правой полосе 111R движения. Местоположение въезда устанавливается на левой полосе 111L движения, когда рассматриваемое транспортное средство V движется по левой полосе 111L движения.
[0111] Вследствие этих действий нет необходимости в смене полосы движения во время движения по въездной проезжей части 111, и частота смены полосы движения в пределах въездной проезжей части 111 может быть минимизирована.
[0112] Когда размер R1 внешнего диаметра круговой проезжей части равен или больше, чем первое заданное значение, смена полосы движения возможна с момента времени, когда рассматриваемое транспортное средство V въезжает на круговую проезжую часть 101, до тех пор, пока рассматриваемое транспортное средство не выедет с круговой проезжей части. В частности, смена полосы движения может быть выполнена подходящим образом в соответствии с ситуацией на круговой проезжей части 101, независимо от местоположения въезда. И наоборот, когда выезд 106a рассматриваемого транспортного средства находится в области слева от обращенного вперед направления L3, въезда 105a рассматриваемого транспортного средства, время, в которое рассматриваемое транспортное средство V остается на круговой проезжей части, сравнительно уменьшается. Следовательно, предпочтительно, чтобы рассматриваемое транспортное средство двигалось ближе к внешней периферии в пределах круговой проезжей части 101. Когда выезд 106a рассматриваемого транспортного средства находится в области справа от обращенного вперед направления L3, въезда 105a рассматриваемого транспортного средства, время, в которое рассматриваемое транспортное средство V остается на круговой проезжей части, сравнительно увеличивается. Следовательно, предпочтительно, чтобы рассматриваемое транспортное средство двигалось близко к внутренней периферии в пределах круговой проезжей части 101, чтобы не препятствовать движению других транспортных средств (в частности, операциям других транспортных средств, выезжающих с круговой проезжей части 101). Когда выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства, степень свободы при выборе маршрута движения по круговой проезжей части 101 выше, чем когда выезд 106a рассматриваемого транспортного средства смещен либо влево, либо вправо от обращенного вперед направления L3 въезда 105а рассматриваемого транспортного средства.
[0113] Следовательно, когда размер R1 внешнего диаметра круговой проезжей части равен или превышает первое заданное значение, и выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства, местоположение въезда может быть установлено на любую полосу движения. В частности, в примере, показанном на фиг. 5, местоположение въезда было установлено на полосе движения рассматриваемого транспортного средства в процессе на этапе S105, но этот пример не предоставляется в качестве ограничения. Например, местоположение въезда может быть установлено на полосе движения, где несколько впереди идущих транспортных средств. В этом случае на круговую проезжую часть 101 можно въехать за короткое время или перекресток с круговым движением 100 можно проехать быстро.
[0114] [Сценарий, в котором размер внешнего диаметра круговой проезжей части является вторым заданным значением или больше, а выезд рассматриваемого транспортного средства находится в обращенном вперед направлении въезда рассматриваемого транспортного средства]
Рассматривается случай, в котором размер R1 внешнего диаметра круговой проезжей части меньше первого заданного значения, а размер по ширине круговой проезжей части 101 (именуемый ниже «размер W1 по ширине круговой проезжей части») равен или больше второго заданного значения на перекрестке 100А с круговым движением, показанным на фиг. 9. В этом случае в процессе на этапе S102 первого управления установкой местоположения въезда, показанного на фиг. 5, размер по ширине круговой проезжей части оценивается как равный или превышающий второе пороговое значение, и выполняется процесс на этапе S104. В сценарии движения, показанном на фиг. 9, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства», выполняется процесс на этапе S105, и местоположение въезда устанавливается на полосу движения рассматриваемого транспортного средства. В частности, в примере, показанном на фиг. 9, в котором въездная проезжая часть 111 является двумя полосами движения, местоположение въезда устанавливается на правой полосе 111R движения, когда рассматриваемое транспортное средство V движется по правой полосе 111R движения. Местоположение въезда устанавливается на левой полосе 111L движения, когда рассматриваемое транспортное средство V движется по левой полосе 111L движения.
[0115] Вследствие этих действий нет необходимости в смене полосы движения во время движения по въездной проезжей части 111, и частота смены полосы движения в пределах въездной проезжей части 111 может быть минимизирована.
[0116] Даже когда размер W1 по ширине круговой проезжей части равен или больше, чем второе заданное значение, смена полосы движения может быть выполнена с момента времени, когда рассматриваемое транспортное средство V въезжает на круговую проезжую часть 101, до тех пор, пока рассматриваемое транспортное средство не выедет с круговой проезжей части. В частности, смена полосы движения может быть выполнена подходящим образом в соответствии с ситуацией на круговой проезжей части 101, независимо от местоположения въезда. Следовательно, местоположение въезда может быть установлено на любую полосу движения, когда размер W1 по ширине круговой проезжей части равна или превышает второе заданное значение, и выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства. Благодаря этой конфигурации на круговую проезжую часть 101 можно въехать за короткое время, а перекресток 100 с круговым движением можно быстро пересечь в соответствии с ситуацией в окрестностях рассматриваемого транспортного средства или ситуацией движения рассматриваемого транспортного средства V.
[0117] [Сценарий, в котором есть светофор, управляющий въездом на круговую проезжую часть, и выезд рассматриваемого транспортного средства находится в обращенном вперед направлении въезда рассматриваемого транспортного средства]
Рассматривается случай, в котором на перекрестке 100А с круговым движением, показанном на фиг. 9, размер R1 внешнего диаметра круговой проезжей части меньше первого заданного значения, размер W1 по ширине круговой проезжей части меньше второго заданного значения, и светофор 108 (см. фиг. 2), управляющий въездом на круговую проезжую часть 101, установлен в местоположении близко к въезду 105а рассматриваемого транспортного средства (светофор 108 не показан на фиг. 9). В этом случае оценивается наличие светофора в процессе на этапе S103 первого управления установкой местоположения въезда, показанного на фиг. 5, и выполняется процесс на этапе S104. В сценарии движения, показанном на фиг. 9, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении въезда 105a рассматриваемого транспортного средства», выполняется процесс на этапе S105, и местоположение въезда устанавливается на полосу движения рассматриваемого транспортного средства. В частности, в примере, показанном на фиг. 9, в котором въездная проезжая часть 111 является двумя полосами движения, местоположение въезда устанавливается на правой полосе 111R движения, когда рассматриваемое транспортное средство V движется по правой полосе 111R движения. Когда рассматриваемое транспортное средство V движется по левой полосе 111L движения, местоположение въезда устанавливается на левую полосу 111L движения.
[0118] Вследствие этих действий нет необходимости в смене полосы движения во время движения по въездной проезжей части 111, и частота смены полосы движения в пределах въездной проезжей части 111 может быть минимизирована.
[0119] Когда установлен светофор 108, управляющий въездом на круговую проезжую часть 101, существует ограничение по количеству транспортных средств на круговой проезжей части 101, и круговая проезжая часть 101 не сразу становится переполненной. В частности, смена полосы движения может быть легко выполнена в соответствии с ситуацией на круговой проезжей части 101, независимо от местоположения въезда. Следовательно, когда установлен светофор 108, управляющий въездом на круговую проезжую часть 101, местоположение въезда может быть установлено на любой полосе движения, даже когда выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства. Благодаря этой конфигурации на круговую проезжую часть 101 можно въехать за короткое время, а перекресток 100 с круговым движением можно быстро пересечь в соответствии с ситуацией в окрестностях рассматриваемого транспортного средства или ситуацией движения рассматриваемого транспортного средства V.
[0120] При первом управлении установкой местоположения въезда, показанном на фиг. 5, когда размер R1 внешнего диаметра круговой проезжей части меньше первого заданного значения, размер W1 по ширине круговой проезжей части меньше второго заданного значения, и управляющий въездом светофор не установлен, процесс переходит на этап S106, и выбирается выполнение четвертого управления установкой местоположения въезда.
[0121] [Сценарий, в котором существует множество радиальных проезжих частей между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства]
Рассматривается случай, в котором на перекрестке 100B с круговым движением, показанным на фиг. 10, имеется множество радиальных проезжих частей 110, соединенных с круговой проезжей частью 101, между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства. В этом случае оценивается наличие множества радиальных проезжих частей в процессе на этапе S201 второго управления установкой местоположения въезда, показанного на фиг. 6, и выполняется процесс на этапе S202. На перекрестке 100B с круговым движением, показанном на фиг. 10, [транспортные средства] движутся по часовой стрелке по круговой проезжей части 101, следовательно, выполняется процесс на этапе S203, и местоположение въезда устанавливается на полосе движения справа от крайней левой полосы движения. В частности, в примере, показанном на фиг. 10, в котором въездная проезжая часть 111 является двумя полосами движения, местоположение въезда устанавливается на правой полосе 111R движения. В случае, когда въездная проезжая часть 111 является тремя полосами движения, как показано на фиг. 14, местоположение въезда устанавливается либо на крайней правой полосе 111R' движения, либо на центральной полосе 111C движения. В этом случае местоположение въезда устанавливается на основе других условий (например, существует несколько впереди идущих транспортных средства и т.д.).
[0122] В случае, когда направление движения по круговой проезжей части 101 является направлением против часовой стрелки, выполняется процесс с этапа S202 по этап S204, и местоположение въезда устанавливается на полосе движения слева от крайней правой полосы движения. В частности, в примере, в котором въездная проезжая часть 111 является двумя полосами движения, как показано на фиг. 10, местоположение въезда устанавливается на левой полосе 111L движения. В случае, когда въездная проезжая часть 111 является тремя полосами движения, как показано на фиг. 14, местоположение въезда устанавливается либо на крайней левой полосе 111L' движения, либо на центральной полосе 111C движения. В этом случае местоположение въезда устанавливается на основе других условий (например, существует несколько впереди идущих транспортных средства и т.д.).
[0123] Благодаря этой конфигурации нелегко препятствовать движению других транспортных средств, въезжающих с множества радиальных проезжих частей 110 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства, или другим транспортным средствам, выезжающим по радиальным проезжим частям 110, и возможно плавно двигаться по круговой проезжей части 101.
[0124] Во втором управлении установкой местоположения въезда, показанном на фиг. 6, когда множество радиальных проезжих частей 110 не присутствует между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства (когда выездная проезжая часть 112 находится рядом с въездной проезжей частью 111 или когда между въездной проезжей частью 111 и выездной проезжей частью 112 присутствует только одна радиальная проезжая часть 110), процесс переходит на этап S205, и выбирается выполнение четвертого управления установкой местоположения въезда.
[0125] [Сценарий, в котором существует высокая степень скопления транспортных средств на въезде на радиальных проезжих частях между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства]
Рассматривается случай, в котором на перекрестке 100C с круговым движением, показанном на фиг. 11, радиальные проезжие части 110, соединенные с круговой проезжей частью 101, присутствуют между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства и существует высокая степень скопления транспортных средств на въезде из других транспортных средств Vα на радиальных проезжих частях 110. В этом случае оценивается наличие радиальных проезжих частей в процессе на этапе S301 третьего управления установкой местоположения въезда, показанного на фиг. 7, выполняется процесс на этапе S302, и вычисляются степени скопления транспортных средств на въезде на радиальных проезжих частях 110 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства. Если степени скопления транспортных средств на въезде равны или превышают пороговое значение, оценка на этапе S303 является положительной, и выполняется процесс на этапе S304. На перекрестке 100B с круговым движением, показанном на фиг. 11, [транспортные средства] движутся по круговой проезжей части 101 по часовой стрелке, следовательно, выполняется процесс на этапе S305, и местоположение въезда устанавливается на полосе движения справа от крайней левой полосы движения. В частности, в примере, показанном на фиг. 11, в котором въездная проезжая часть 111 является двумя полосами движения, местоположение въезда устанавливается на правой полосе 111R движения. Когда въездная проезжая часть 111 является тремя полосами движения (см. фиг. 14), местоположение въезда устанавливается либо на крайней правой полосе 111R' движения, либо на центральной полосе 111C движения. В этом случае местоположение въезда устанавливается на основе других условий (например, существует несколько впереди идущих транспортных средства и т.д.).
[0126] В случае, когда направление движения по круговой проезжей части 101 является направлением против часовой стрелки, выполняется процесс с этапа S304 по этап S306, и местоположение въезда устанавливается на полосе движения слева от крайней правой полосы движения. В частности, в примере, в котором въездная проезжая часть 111 является двумя полосами движения, как показано на фиг. 11, местоположение въезда устанавливается на левой полосе 111L движения. В случае, в котором въездная проезжая часть 111 является тремя полосами движения, как показано на фиг. 14, местоположение въезда устанавливается либо на крайней левой полосе 111L' движения, либо на центральной полосе 111C движения. В этом случае местоположение въезда устанавливается на основе других условий (например, существует несколько впереди идущих транспортных средства и т.д.).
[0127] Благодаря этой конфигурации нелегко препятствовать движению других транспортных средств, въезжающих с радиальных проезжих частей 110 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства, и возможно плавно двигаться по круговой проезжей части 101. Не препятствуя движению других транспортных средств, [этот метод] может способствовать плавному движению, не мешая транспортному потоку на перекрестке 100 с круговым движением. Кроме того, возможно проезжать по круговой проезжей части 101 в полосе движения с низкой степенью скопления транспортных средств и быстро проезжать перекресток 100 с круговым движением.
[0128] При третьем управлении установкой местоположения въезда, показанном на фиг. 7, когда между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства присутствуют радиальные проезжие части 110 или когда степень скопления транспортных средств на въезде мала, процесс переходит на этап S307 и выбирается выполнение четвертого управления установкой местоположении въезда.
[0129] [Сценарий, в котором въезд рассматриваемого транспортного средства является двумя полосами движения, и левый поворот должен быть выполнен на перекрестке с круговым движением]
В нижеследующем описании предполагается, что выполнение четвертого управления установкой местоположения въезда было выбрано во всех с первого по третье управлениях установкой местоположения въезда. Сценарий поворота налево рассматривается на перекрестке 100D с круговым движением, показанном на фиг. 12, в котором въездная проезжая часть 111 является двумя полосами движения. В этом случае оценка является положительной в процессе на этапе S401 четвертого управления установкой местоположения въезда, показанного на фиг. 8, и выполняется процесс на этапе S402. В частности, выполняется оценка, присутствует ли выезд 106a рассматриваемого транспортного средства в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства. В сценарии движения, показанном на фиг. 12, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в области слева от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства», вышеупомянутая оценка является отрицательной, выполняется процесс на этапе S404, а местоположение въезда устанавливается на левую полосу 111L движения.
[0130] Благодаря этой конфигурации рассматриваемое транспортное средство не будет без необходимости перемещаться внутрь в пределах круговой проезжей части 101, и рассматриваемое транспортное средство может перемещаться рядом с внешней периферией в пределах круговой проезжей части 101 и плавно выезжать. Следовательно, частота смены полосы движения на круговой проезжей части 101 может быть минимизирована.
[0131] [Сценарий, в котором местоположение въезда является двумя полосами движения, и движение прямо должно быть выполнено на перекрестке с круговым движением]
Рассматривается сценарий, в котором рассматриваемое транспортное средство движется прямо на перекрестке 100А с круговым движением, показанный на фиг. 9, в котором въездная проезжая часть 111 является двумя полосами движения. В этом случае выполнена положительная оценка в процессе на этапе S401 четвертого управления установкой местоположения въезда, показанного на фиг. 8, и выполняется процесс на этапе S402. В сценарии движения, показанном на фиг. 9, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства», вышеупомянутая оценка является отрицательной, выполняется процесс на этапе S404, а местоположение въезда устанавливается на левую полосу 111L движения.
[0132] Благодаря этой конфигурации рассматриваемое транспортное средство не будет без необходимости перемещаться внутрь в пределах круговой проезжей части 101, и рассматриваемое транспортное средство может перемещаться рядом с внешней периферией в пределах круговой проезжей части 101 и плавно выезжать. Следовательно, частота смены полосы движения на круговой проезжей части 101 может быть минимизирована.
[0133] [Сценарий, в котором въезд рассматриваемого транспортного средства является двумя полосами движения, и правый поворот должен быть выполнен на перекрестке с круговым движением]
Сценарий поворота направо рассматривается на перекрестке 100E с круговым движением, показанном на фиг. 13, в котором въездная проезжая часть 111 является двумя полосами движения. В этом случае оценка является положительной в процессе на этапе S401 четвертого управления установкой местоположения въезда, показанного на фиг. 8, и выполняется процесс на этапе S402. В сценарии движения, показанном на фиг. 13, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства», вышеупомянутая оценка является положительной, выполняется процесс на этапе S403, а местоположение въезда устанавливается на правую полосу 111R движения.
[0134] Благодаря этой конфигурации расстояние движения в пределах круговой проезжей части 101 может быть сокращено еще больше, и с круговой проезжей части 101 можно выехать более быстро, чем в случае движения рядом с внешней периферией в пределах круговой проезжей части 101.
[0135] [Сценарий, в котором въезд рассматриваемого транспортного средства является тремя полосами движения, и левый поворот должен быть выполнен на перекрестке с круговым движением]
Сценарий поворота налево рассматривается на перекрестке 100F с круговым движением, показанном на фиг. 14, в котором въездная проезжая часть 111 является тремя полосами движения. В этом случае выполнена отрицательная оценка в процессе на этапе S401 четвертого управления установкой местоположения въезда, показанного на фиг. 8, и выполняется процесс на этапе S405. В частности, выполняется оценка, присутствует ли выезд 106a рассматриваемого транспортного средства в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства. В сценарии движения, показанном на фиг. 14, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в области слева от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства», вышеупомянутая оценка является отрицательной и выполняется процесс на этапе S407. В частности, выполняется оценка, присутствует ли выезд 106a рассматриваемого транспортного средства в области слева от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства. В сценарии движения, показанном на фиг. 14, оценка является положительной, выполняется процесс на этапе S408, и местоположение въезда устанавливается на крайней левой полосе 111L' движения.
[0136] Благодаря этой конфигурации рассматриваемое транспортное средство не будет без необходимости перемещаться внутрь в пределах круговой проезжей части 101, и рассматриваемое транспортное средство может перемещаться рядом с внешней периферией в пределах круговой проезжей части 101 и плавно выезжать. Следовательно, частота смены полосы движения на круговой проезжей части 101 может быть минимизирована.
[0137] [Сценарий, в котором въезд рассматриваемого транспортного средства является тремя полосами движения, и движение прямо должно быть выполнено на перекрестке с круговым движением]
Сценарий движения прямо рассматривается на перекрестке 100G с круговым движением, показанном на фиг. 15, в котором въездная проезжая часть 111 является тремя полосами движения. В этом случае выполнена отрицательная оценка в процессе на этапе S401 четвертого управления установкой местоположения въезда, показанного на фиг. 8, и выполняется процесс на этапе S405. В сценарии движения, показанном на фиг. 15, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства», вышеупомянутая оценка является отрицательной и выполняется процесс на этапе S407. В сценарии движения, показанном на фиг. 15, оценка также является отрицательной в процессе на этапе S407. В результате выполняется процесс на этапе S409, и местоположение въезда устанавливается на центральной полосе 111C движения.
[0138] Благодаря этой конфигурации расстояние движения в пределах круговой проезжей части 101 может быть сокращено еще больше, и с круговой проезжей части 101 можно выехать более быстро, чем в случае движения рядом с внешней периферией в пределах круговой проезжей части 101.
[0139] [Сценарий, в котором въезд рассматриваемого транспортного средства является тремя полосами движения, и правый поворот должен быть выполнен на перекрестке с круговым движением]
Сценарий поворота направо рассматривается на перекрестке 100H с круговым движением, показанном на фиг. 16, в котором въездная проезжая часть 111 является тремя полосами движения. В этом случае выполнена отрицательная оценка в процессе на этапе S401 четвертого управления установкой местоположения въезда, показанного на фиг. 8, и выполняется процесс на этапе S405. В сценарии движения, показанном на фиг. 15, выполняется оценка «выезд 106a рассматриваемого транспортного средства присутствует в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства», вышеупомянутая оценка является положительной, выполняется процесс на этапе S406, а местоположение въезда устанавливается на крайнюю правую полосу 111R' движения.
[0140] Благодаря этой конфигурации расстояние движения в пределах круговой проезжей части 101 может быть сокращено еще больше, и с круговой проезжей части 101 можно выехать более быстро, чем в случае движения рядом с внешней периферией в пределах круговой проезжей части 101.
[0141] Таким образом, с помощью способа помощи при вождении и устройства помощи при вождении первого варианта осуществления местоположения въезда 105a рассматриваемого транспортного средства и выезда 106a рассматриваемого транспортного средства могут быть определены, когда была сделана оценка того, что рассматриваемое транспортное средство V прибыло к перекрестку 100 с круговым движением. Местоположение въезда затем устанавливается на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
[0142] Обычно, когда крайняя правая полоса движения была выбрана в местоположении въезда, рассматриваемое транспортное средство движется по внутренней периферии по круговой проезжей части 101, а затем выполняет смену полосы движения в направлении внешней периферии и движется через выезд 106а рассматриваемого транспортного средства на выездную проезжую часть 112. Следовательно, степень трудности при движении по круговой проезжей части 101 выше, когда была выбрана полоса движения рядом с крайней правой полосой движения, чем когда была выбрана крайняя левая полоса движения в местоположении въезда. Однако рассматриваемое транспортное средство движется по круговой проезжей части 101 вдоль внешней периферии из-за выбора крайней левой полосы движения, и когда расстояние движения на круговой проезжей части 101 увеличивается, существует риск препятствовать движению других транспортных средств, выезжающих с круговой проезжей части 101.
[0143] Чтобы решить эту проблему, в первом варианте осуществления местоположение въезда устанавливается на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, посредством чего, например, местоположение въезда может быть установлено на крайней левой полосе движения в сценарии движения, в котором предпочтительным является выбор крайней левой полосы движения, и местоположение въезда может быть установлено на крайней правой полосе движения в сценарии, в котором предпочтительным является выбор крайней правой полосы движения. В частности, на въезде 105a рассматриваемого транспортного средства и въездной проезжей части 111 перед въездом на круговую проезжую часть 101 можно выбрать полосу движения, подходящую для движения по круговой проезжей части 101, и по ней можно проехать. В результате возможность проезда перекрестка 100 с круговым движением подходящим образом может быть увеличена, а частота смены полосы движения на круговой проезжей части 101 может быть минимизирована.
[0144] Кроме того, препятствие движению других транспортных средств можно предотвратить путем минимизации смены полосы движения на круговой проезжей части 101. Кроме того, поскольку полоса движения, подходящая для движения по круговой проезжей части 101, может быть выбрана заранее перед въездом на круговую проезжую часть 101, время движения по круговой проезжей части 101 может быть сокращено, и перекресток 100 с круговым движением можно проехать плавно.
[0145] Когда местоположение въезда устанавливается на основе относительного взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, местоположение въезда устанавливается слева от центрального по ширине местоположения въезда 105a рассматриваемого транспортного средства, когда выезд 106a рассматриваемого транспортного средства оценен как присутствующий в области слева от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства, как показано в четвертом управлении установкой местоположения въезда. Когда было оценено, что выезд 106a рассматриваемого транспортного средства присутствует в области справа от обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства, местоположение въезда устанавливается справа от центрального по ширине местоположения въезда 105a рассматриваемого транспортного средства.
[0146] Благодаря этой конфигурации возможно минимизировать ненужную смену полосы движения на круговой проезжей части 101 и минимизировать расстояние движения на круговой проезжей части 101, чтобы сократить время движения в соответствии с относительным взаимным расположением между въездом 105a рассматриваемого транспортного средства и выезд 106а рассматриваемого транспортного средства. В частности, рассматриваемое транспортное средство может проезжать перекресток 100 с круговым движением по подходящему маршруту движения.
[0147] Кроме того, когда местоположение въезда установлено на основе присутствия радиальных проезжих частей 110, полученного из взаимного расположения между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства, и существует множество радиальных проезжих частей 110 между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, местоположение въезда устанавливается ближе справа, когда движение транспорта движется по часовой стрелке на круговой проезжей части 101, и местоположение въезда устанавливается ближе слева, когда движение транспорта движется против часовой стрелки на круговой проезжей части 101, как показано во втором управлении установкой местоположения въезда.
[0148] Когда местоположение въезда установлено на основе присутствия радиальных проезжих частей 110, полученного из взаимного расположения между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства, и существует высокая степень скопления транспортных средств на въезде на радиальных проезжих частях 110, присутствующих между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, местоположение въезда устанавливается ближе справа, когда движение транспорта движется по часовой стрелке на круговой проезжей части 101, и местоположение въезда устанавливается ближе слева, когда движение транспорта движется против часовой стрелки на круговой проезжей части 101, как показано в третьем управлении установкой местоположения въезда.
[0149] Благодаря этой конфигурации нелегко препятствовать движению других транспортных средств, въезжающих с радиальных проезжих частей 110 между въездом 105а рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства, или другим транспортным средствам, выезжающим по радиальным проезжим частям 110, и возможно плавно двигаться по круговой проезжей части 101.
[0150] Когда размер R1 внешнего диаметра круговой проезжей части и/или размер W1 по ширине круговой проезжей части равен или превышает заданное значение или въезд транспортных средств на круговую проезжую часть 101 управляется, существует высокая степень свободы при смене полосы движения в пределах круговой проезжей части 101. В таких случаях, когда выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства, местоположение въезда устанавливается на полосе движения рассматриваемого транспортного средства, как показано в первом управлении установкой местоположения въезда. Благодаря этой конфигурации не будет необходимости менять полосу движения во время движения по въездной проезжей части 111, и частота смены полосы движения при движении по въездной проезжей части 111 может быть минимизирована.
[0151] Когда существует высокая степень свободы при смене полосы движения в пределах круговой проезжей части 101 и выезд 106a рассматриваемого транспортного средства присутствует в обращенном вперед направлении L3 въезда 105a рассматриваемого транспортного средства, местоположение въезда может быть установлено в любом месте в соответствии с, в частности, ситуацией в окрестностях рассматриваемого транспортного средства. Следовательно, когда рассматриваемое транспортное средство проезжает по перекрестку 100 с круговым движением, может быть установлено более подходящее местоположение въезда, в то время как движение может быть сокращено по времени и увеличена плавность движения.
[0152] Кроме того, когда местоположение въезда установлено на другой полосе движения, выполняется оценка, может ли смена полосы движения в направлении местоположения въезда быть выполнена плавно, и когда оценено, что плавная смена полосы движения может быть выполнена, позволяется выполнение управления сменой полосы движения. Когда оценено, что плавная смена полосы движения не может быть выполнена, выполнение управления сменой полосы движения не разрешается, и движение по полосе движения рассматриваемого транспортного средства сохраняется. Следовательно, возможно минимизировать, среди прочего, частоту быстрых изменений скорости транспортного средства и изменений в рулевом управлении, сопровождающих смены полосы движения при движении по въездной проезжей части 111, и может быть выполнено плавное движение.
[0153] Далее будут описаны эффекты.
С помощью способа помощи при вождении и устройства помощи при вождении согласно первому варианту осуществления могут быть достигнуты перечисленные ниже эффекты.
[0154] (1) Способ помощи при вождении для помощи при движении рассматриваемого транспортного средства V, при этом упомянутый способ содержит обеспечение контроллера (процессора 3 оценки распознавания), который вычисляет маршрут движения (целевой маршрут), по которому должно двигаться рассматриваемое транспортное средство V, и выполняет управление помощью при вождении на основе маршрута движения, при этом способ помогает при движении рассматриваемого транспортного средства V, при этом упомянутый способ сконфигурирован так, что:
выполняется оценка, прибыло ли рассматриваемое транспортное средство к перекрестку 100 с круговым движением, имеющему круговую проезжую часть 101, с которой соединены три или более радиальных проезжих частей 110;
когда выполнена оценка того, что рассматриваемое транспортное средство V прибыло к перекрестку 100 с круговым движением, определяются местоположение въезда (въезда 105а рассматриваемого транспортного средства), где рассматриваемое транспортное средство V должно въехать на круговую проезжую часть 101, и местоположение выезда (выезда 106а рассматриваемого транспортного средства), где транспортное средство V должно выехать с круговой проезжей части 101; и
местоположение въезда, которое является местоположением по ширине рассматриваемого транспортного средства V на въезде (въезде 105a рассматриваемого транспортного средства), устанавливается на основе взаимного расположения между въездом (въездом 105a рассматриваемого транспортного средства) и выездом (выездом 106a рассматриваемого транспортного средства).
Следовательно, частота смены полосы движения в пределах круговой проезжей части 101 может быть, таким образом, минимизирована.
[0155] (2) Способ помощи при вождении сконфигурирован так, что:
установка местоположения въезда выполняется на основе относительного взаимного расположения между въездом (въездом 105a рассматриваемого транспортного средства) и выездом (выездом 106a рассматриваемого транспортного средства);
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в области слева от обращенного вперед направления L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда устанавливается слева от центрального по ширине местоположения въезда (въезда 105a рассматриваемого транспортного средства); и
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в области справа от обращенного вперед направления L3 въезда, местоположение въезда устанавливается справа центрального по ширине местоположения въезда (въезда 105a рассматриваемого транспортного средства).
Таким образом, можно проехать по круговой проезжей части 101 по подходящему маршруту движения в соответствии с относительным взаимным расположением между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
[0156] (3) Способ помощи при вождении сконфигурирован так, что:
выполняется оценка, имеет ли въезд (въезд 105a рассматриваемого транспортного средства) две полосы движения, расположенные в направлении ширины.
когда оценено, что въезд (въезд 105а рассматриваемого транспортного средства) имеет две полосы движения, расположенные в направлении ширины, установка местоположения въезда выполняется на основе относительного взаимного расположения между въездом (въездом 105а рассматриваемого транспортного средства) и выездом (выездом 106а рассматриваемого транспортного средства);
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в области слева от обращенного вперед направления L3 въезда (въезда 105a рассматриваемого транспортного средства) или в обращенном вперед направлении L3 въезда (въезда 105а рассматриваемого транспортного средства), местоположение въезда устанавливается на левую полосу 111L движения; и
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в области справа от обращенного вперед направления L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда устанавливается на правую полосу 111R движения.
Таким образом, возможно проехать по круговой проезжей части 101 по подходящему маршруту движения в соответствии с относительным взаимным расположением между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
[0157] (4) Способ помощи при вождении сконфигурирован так, что:
выполняется оценка, имеет ли въезд (въезд 105a рассматриваемого транспортного средства) три или более полосы движения, расположенные в направлении ширины;
когда оценено, что въезд (въезд 105а рассматриваемого транспортного средства) имеет три или более полосы движения, расположенные в направлении ширины, установка местоположения въезда выполняется на основе относительного взаимного расположения между въездом (въездом 105а рассматриваемого транспортного средства) и выездом (выездом 106а рассматриваемого транспортного средства);
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в области слева от обращенного вперед направления L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда устанавливается на крайнюю левую полосу 111L' движения;
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в области справа от обращенного вперед направления L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда устанавливается на крайнюю правую полосу 111R' движения; и
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в обращенном вперед направлении L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда устанавливается на полосу движения (центральную полосу движения 111C) между крайней левой полосой 111L' движения и крайней правой полосой 111R' движения.
Таким образом, возможно проехать по круговой проезжей части 101 по подходящему маршруту движения в соответствии с относительным взаимным расположением между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
[0158] (5) Способ помощи при вождении сконфигурирован так, что:
выполняется оценка, равен ли или больше размер внешнего диаметра (размер R1 внешнего диаметра круговой проезжей части) круговой проезжей части 101, чем первое заданное значение, при котором может быть обеспечено расстояние, необходимое для смены полосы движения в пределах круговой проезжей части 101;
когда оценено, что размер внешнего диаметра (размер R1 внешнего диаметра круговой проезжей части) равен ли или больше, чем первое заданное значение, установка местоположения въезда выполняется на основе относительного взаимного расположения между въездом (въездом 105а рассматриваемого транспортного средства) и выездом (выездом 106а рассматриваемого транспортного средства); и
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в обращенном вперед направлении L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда может быть установлено на любое местоположение.
Таким образом, возможно проехать по круговой проезжей части 101 по подходящему маршруту движения в соответствии с относительным взаимным расположением между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства.
[0159] (6) Способ помощи при вождении сконфигурирован так, что:
выполняется оценка, равен ли или больше размер по ширине (размер W1 по ширине круговой проезжей части) круговой проезжей части 101, чем второе заданное значение, при котором обеспечена возможность смены полосы движения на круговой проезжей части 101;
когда оценено, что размер по ширине (размер W1 по ширине круговой проезжей части) равен ли или больше, чем второе заданное значение, установка местоположения въезда выполняется на основе относительного взаимного расположения между въездом (въездом 105а рассматриваемого транспортного средства) и выездом (выездом 106а рассматриваемого транспортного средства); и
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в обращенном вперед направлении L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда может быть установлено на любое местоположение.
Благодаря этой конфигурации, когда рассматриваемое транспортное средство проезжает по перекрестку 100 с круговым движением, может быть установлено более подходящее местоположение въезда, в то время как движение может быть сокращено по времени и увеличена плавность движения.
[0160] (7) Способ помощи при вождении сконфигурирован так, что:
выполняется оценка, обеспечен ли светофор 108, управляющий въездом на круговую проезжую часть 101;
когда оценено, что светофор 108 обеспечен, установка местоположения въезда выполняется на основе относительного взаимного расположения между въездом (въездом 105а рассматриваемого транспортного средства) и выездом (выездом 106а рассматриваемого транспортного средства); и
когда оценено, что выезд (выезд 106a рассматриваемого транспортного средства) присутствует в обращенном вперед направлении L3 въезда (въезда 105a рассматриваемого транспортного средства), местоположение въезда может быть установлено на любое местоположение.
Благодаря этой конфигурации, когда рассматриваемое транспортное средство проезжает по перекрестку 100 с круговым движением, может быть установлено более подходящее местоположение въезда, в то время как движение может быть сокращено по времени и увеличена плавность движения.
[0161] (8) Способ помощи при вождении сконфигурирован таким образом, что, когда местоположение въезда может быть установлено в любое местоположение, местоположение въезда устанавливается на линии продолжения (полосе движения рассматриваемого транспортного средства), продолжающейся вдоль проезжей части движения от текущего местоположения рассматриваемого транспортного средства V.
Таким образом, возможно минимизировать частоту смены полосы движения на въездной проезжей части 111.
[0162] (9) Способ помощи при вождении сконфигурирован так, что:
установка местоположения въезда выполняется на основе присутствия радиальных проезжих частей 110, полученного из взаимного расположения между въездом (въездом 105a рассматриваемого транспортного средства) и выездом (выездом 106a рассматриваемого транспортного средства); и
когда оценено, что множество радиальных проезжих частей 110 присутствует между въездом (въездом 105a рассматриваемого транспортного средства) и выездом (выездом 106a рассматриваемого транспортного средства), местоположение въезда устанавливается справа от центрального по ширине местоположения въезда (въезда 105а рассматриваемого транспортного средства) в случаях, в которых направление движения в пределах круговой проезжей части 101 является направлением по часовой стрелке, и местоположение въезда устанавливается слева от центрального по ширине местоположения въезда (въезда 105а рассматриваемого транспортного средства) в случаях, в которых направление движения в пределах круговой проезжей части 101 является направлением против часовой стрелки.
Благодаря этой конфигурации возможно минимизировать частоту смены полосы движения в пределах въездной проезжей части 101 и возможно плавно проезжать по перекрестку 100 с круговым движением, не препятствуя движению других транспортных средств, въезжающих и выезжающих с круговой проезжей части 101 по радиальным проезжим частям 110.
[0163] (10) Способ помощи при вождении сконфигурирован так, что:
установка местоположения въезда выполняется на основе присутствия радиальных проезжих частей 110, полученного из взаимного расположения между въездом (въездом 105a рассматриваемого транспортного средства) и выездом (выездом 106a рассматриваемого транспортного средства); и
когда оценено, что радиальные проезжие части 110 присутствуют между въездом (въездом 105а рассматриваемого транспортного средства) и выездом (выездом 106а рассматриваемого транспортного средства), и оценено, что существует высокая степень скопления (степень скопления транспортных средств на въезде) транспортных средств, въезжающих на круговую проезжую часть 101 с радиальных проезжих частей 110, местоположение въезда устанавливается справа от центрального по ширине местоположения въезда (въезда 105a рассматриваемого транспортного средства) в случаях, в которых направление движения в пределах круговой проезжей части 101 является направлением по часовой стрелке, и местоположение въезда устанавливается слева от центрального по ширине местоположения въезда (въезда 105a рассматриваемого транспортного средства) в случаях, в которых направление движения в пределах круговой проезжей части 101 является направлением против часовой стрелки.
Благодаря этой конфигурации возможно минимизировать частоту смены полосы движения в пределах въездной проезжей части 101 и возможно плавно проезжать по перекрестку 100 с круговым движением, не препятствуя движению других транспортных средств, въезжающих и выезжающих с круговой проезжей части 101 по радиальным проезжим частям 110.
[0164] (11) Способ помощи при вождении сконфигурирован так, что:
когда местоположение въезда установлено в местоположении, отклоненном от линии продолжения (полосы движения рассматриваемого транспортного средства), продолжающейся вдоль проезжей части движения от текущего местоположения рассматриваемого транспортного средства V, выполняется оценка, может ли смена полосы движения в направлении местоположения въезда плавно выполняться к тому времени, когда рассматриваемое транспортное средство прибывает к въезду (въезду 105a рассматриваемого транспортного средства); и
когда оценено, что смена полосы движения может быть выполнена плавно, позволяется выполнение смены полосы движения.
Благодаря этой конфигурации возможно предотвратить случаи быстрого изменения скорости транспортного средства и изменений в рулевом управлении, сопровождающих смену полосы движения, и минимизировать возникновение дискомфорта со стороны находящегося в транспортном средстве человека так, чтобы обеспечить плавное движение.
[0165] (12) Устройство помощи при вождении, снабженное контроллером (процессором 3 оценки распознавания), который вычисляет маршрут движения (целевой маршрут), по которому должно двигаться рассматриваемое транспортное средство V, и выполняет управление помощью при вождении для помощи при движении рассматриваемого транспортного средства V на основе маршрута движения, при этом
контроллер (процессор 3 оценки распознавания) сконфигурирован из:
блока 32 оценки прибытия, который оценивает, прибыло ли рассматриваемое транспортное средство V к перекрестку 100 с круговым движением, имеющему круговую проезжую часть 101, с которой соединены три или более радиальных проезжих частей 110;
блока 33 определения местоположения который, когда оценено блоком 32 оценки прибытия, что рассматриваемое транспортное средство V прибыло к перекрестку 100 с круговым движением, определяет местоположение въезда (въезда 105а рассматриваемого транспортного средства), где рассматриваемое транспортное средство V должно въехать на круговую проезжую часть 101, и местоположение выезда (выезда 106а рассматриваемого транспортного средства), где рассматриваемое транспортное средство V должно выехать с круговой проезжей части 101; и
блока 35 установки местоположения въезда, который устанавливает местоположение въезда, которое является местоположением по ширине рассматриваемого транспортного средства V на въезде (въезде 105a рассматриваемого транспортного средства), на основе взаимного расположения между въездом (въездом 105a рассматриваемого транспортного средства) и выездом (выездом 106a рассматриваемого транспортного средства), определенными блоком 33 определения местоположения.
Таким образом, возможно минимизировать частоту смены полосы движения на въездной проезжей части 101.
[0166] Способ помощи при вождении и устройство помощи при вождении настоящего раскрытия были описаны выше на основе первого варианта осуществления, но этот пример не предоставляется в качестве ограничения конкретной конфигурацией, допускаются изменения конструкции, дополнения и т.д., если нет отклонений от объема изобретения, указанного в формуле изобретения.
[0167] В первом варианте осуществления был представлен пример, в котором оценка того, что рассматриваемое транспортное средство V прибыло к перекрестку с круговым движением 100, выполняется на основании расстояния от рассматриваемого транспортного средства V до въезда 105a рассматриваемого транспортного средства, достигшего расстояния порогового значения или меньше. Однако этот пример не является ограничивающим. Например, прибыло ли рассматриваемое транспортное средство V к перекрестку 100 с круговым движением, можно оценить, используя в качестве опорного значения время, необходимое рассматриваемому транспортному средству V, чтобы прибыть к местоположению въезда (въезда 105а рассматриваемого транспортного средства) на круговую проезжую часть 101. Время, необходимое для прибытия к въезду 105а рассматриваемого транспортного средства, определяется на основе профиля скорости транспортного средства и расстояния движения до въезда 105а рассматриваемого транспортного средства.
[0168] В первом варианте осуществления был представлен пример, в котором управление установкой местоположения въезда выполняется, когда въезд 105a рассматриваемого транспортного средства представляет собой множество полос движения, и местоположение въезда устанавливается на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106а рассматриваемого транспортного средства. Однако управление установкой местоположения въезда может выполняться, даже когда въезд 105a рассматриваемого транспортного средства является одной полосой движения. В этом случае местоположение въезда для рассматриваемого транспортного средства V устанавливается в пределах одной полосы движения в местоположение ближе к левой стороне, чем центральное по ширине местоположение полосы движения, или в местоположение ближе к правой стороне, чем центральное по ширине местоположение полосы движения, посредством чего маршрут движения в пределах круговой проезжей части 101 можно сделать подходящим, и можно минимизировать частоту смены полосы движения в пределах въездной проезжей части 101.
[0169] В первом варианте осуществления был представлен пример, в котором взаимное расположение выезда 106a рассматриваемого транспортного средства оценивается с использованием обращенного вперед направления L3 въезда 105a рассматриваемого транспортного средства в качестве ориентира, но этот пример не предоставляется в качестве ограничения. Например, местоположение рассматриваемого транспортного средства V на въезде 105a рассматриваемого транспортного средства обозначается как «местоположение въезда, где рассматриваемое транспортное средство должно въехать на круговую проезжую часть», и с использованием этого местоположения рассматриваемого транспортного средства V в качестве ориентира, направление, в котором рассматриваемое транспортное средство V обращено вперед, обозначается как «обращенное вперед направление въезда». Затем может быть выполнена оценка, присутствует ли выезд 106a рассматриваемого транспортного средства в области слева от направления, в котором рассматриваемое транспортное средство V обращено вперед, или в области справа.
[0170] В первом варианте осуществления был представлен пример, в котором управление помощью при вождении выполняется во время движения при автономном вождении. Однако этот пример не является ограничивающим, управление помощью при вождении может выполняться во время движения при ручном вождении, в котором водитель заставляет рассматриваемое транспортное средство двигаться/останавливаться по собственному намерению. В этом случае информация о местоположения въезда предоставляется водителю через устройство 7 отображения после того, как местоположение въезда было установлено на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства. Водитель может также узнавать информацию о местоположении въезда с помощью голосового оповещения и т.д.
[0171] В первом варианте осуществления был представлен пример, в котором движение по полосе движения рассматриваемого транспортного средства сохраняется, когда смена полосы движения в направлении местоположения въезда не может быть выполнена, но этот пример не предоставляется в качестве ограничения. Например, в таких случаях, как когда смена полосы движения в направлении местоположения въезда не может быть выполнена или есть много других транспортных средств и свободный проезд оценивается как трудный, местоположение въезда может быть установлено в такое местоположение, в котором местоположение движения на круговой проезжей части 101 проходит по внешней периферии. В этом случае, хотя местоположение въезда не устанавливается на основе взаимного расположения между въездом 105a рассматриваемого транспортного средства и выездом 106a рассматриваемого транспортного средства, возможно проехать по круговой проезжей части 101 без выполнения смены полосы движения на ней.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2767846C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2768091C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2754707C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2014 |
|
RU2682690C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2763452C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2767830C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2719080C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2768417C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2724938C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2738228C1 |
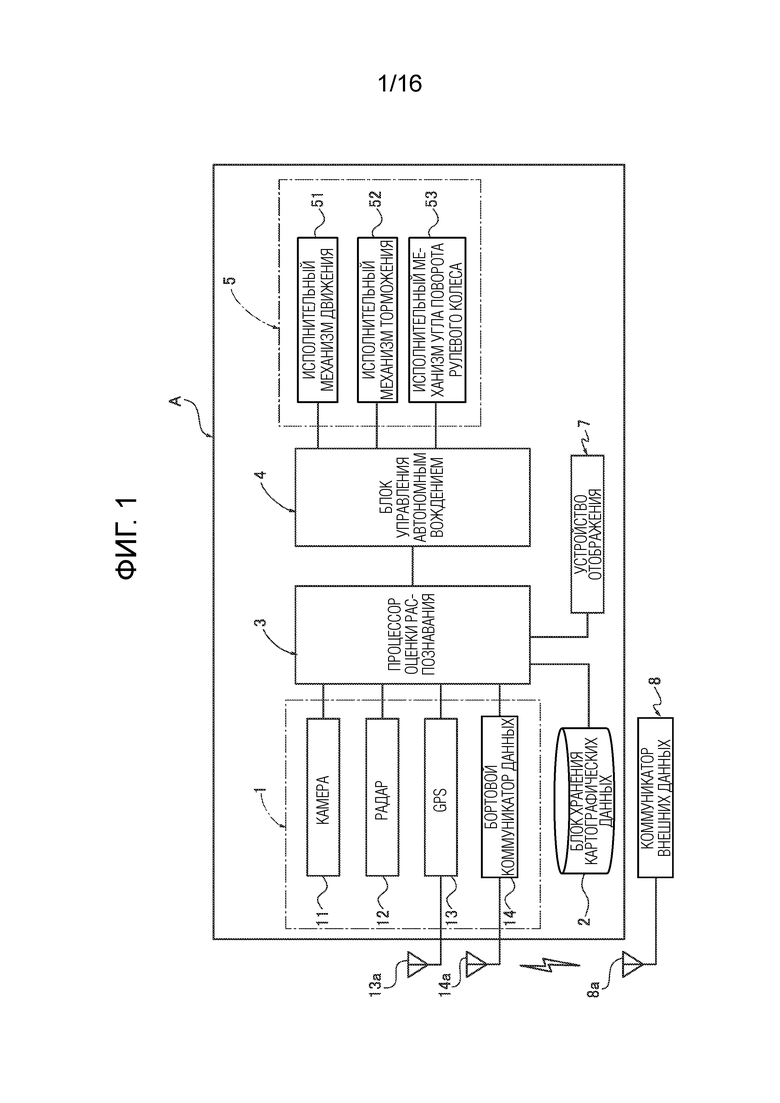

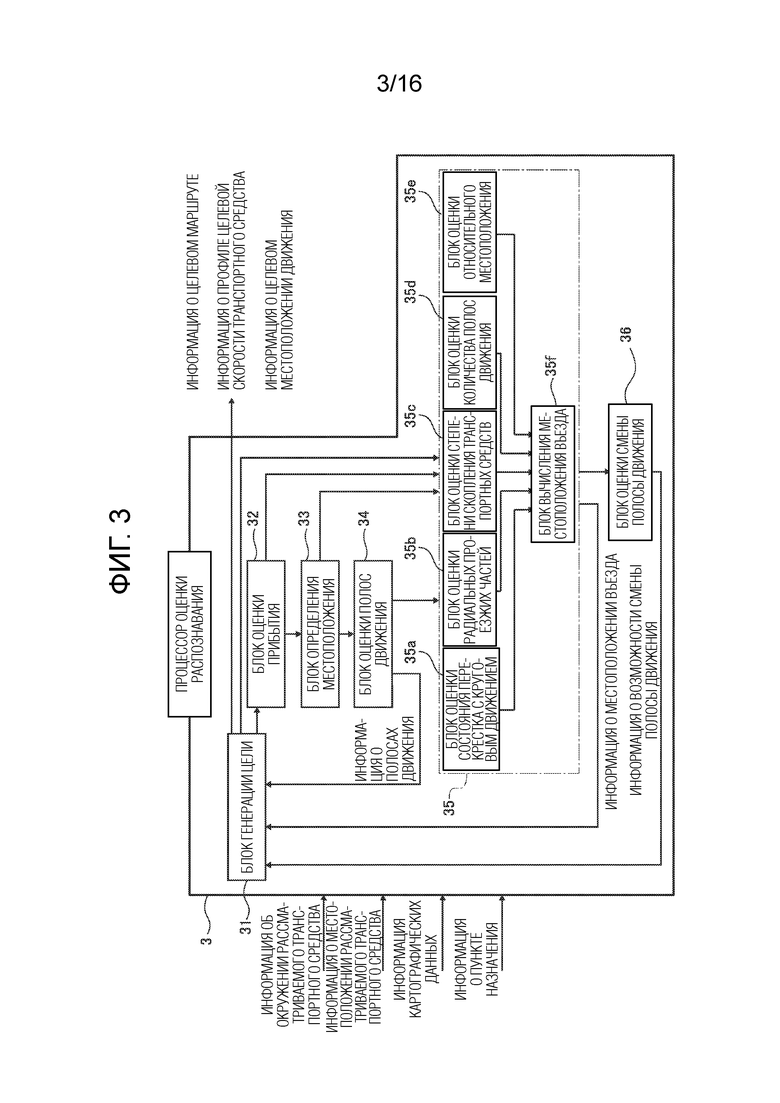
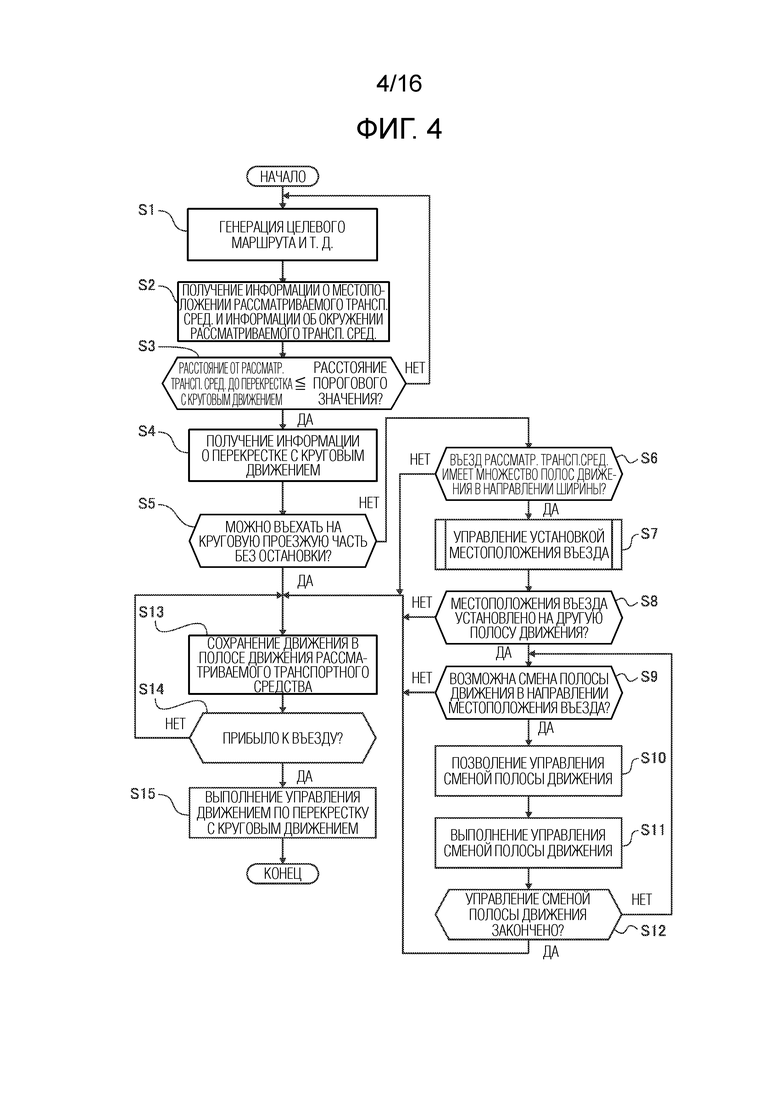
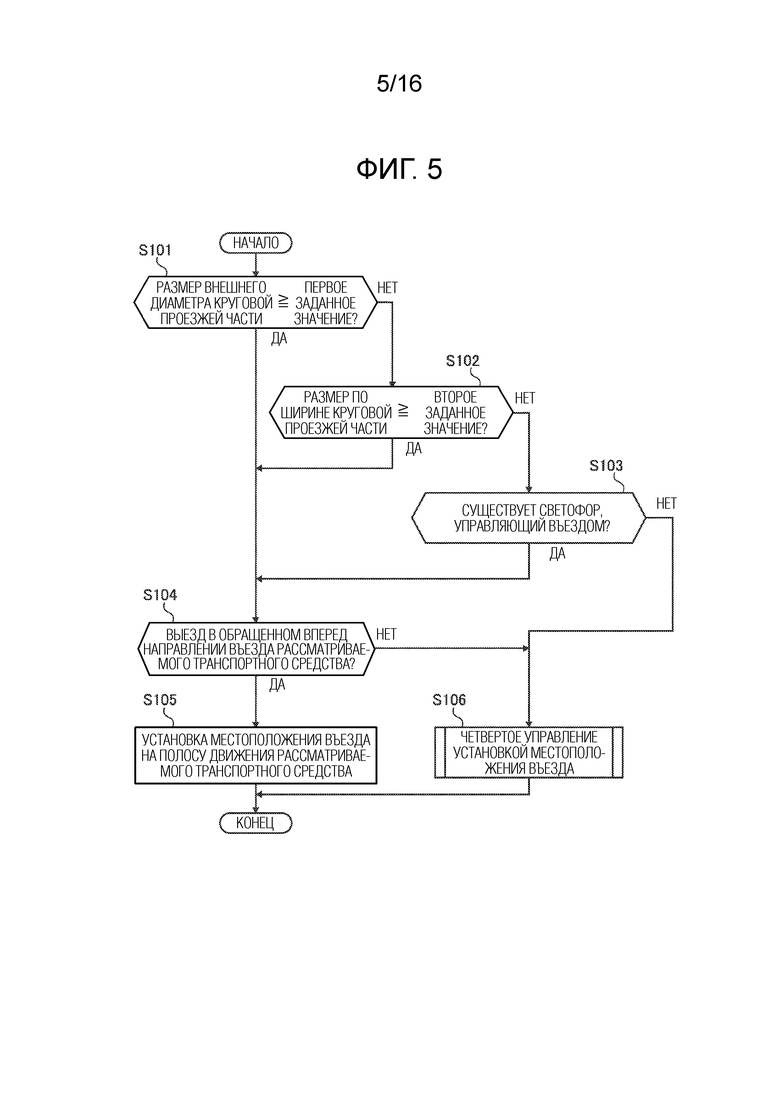
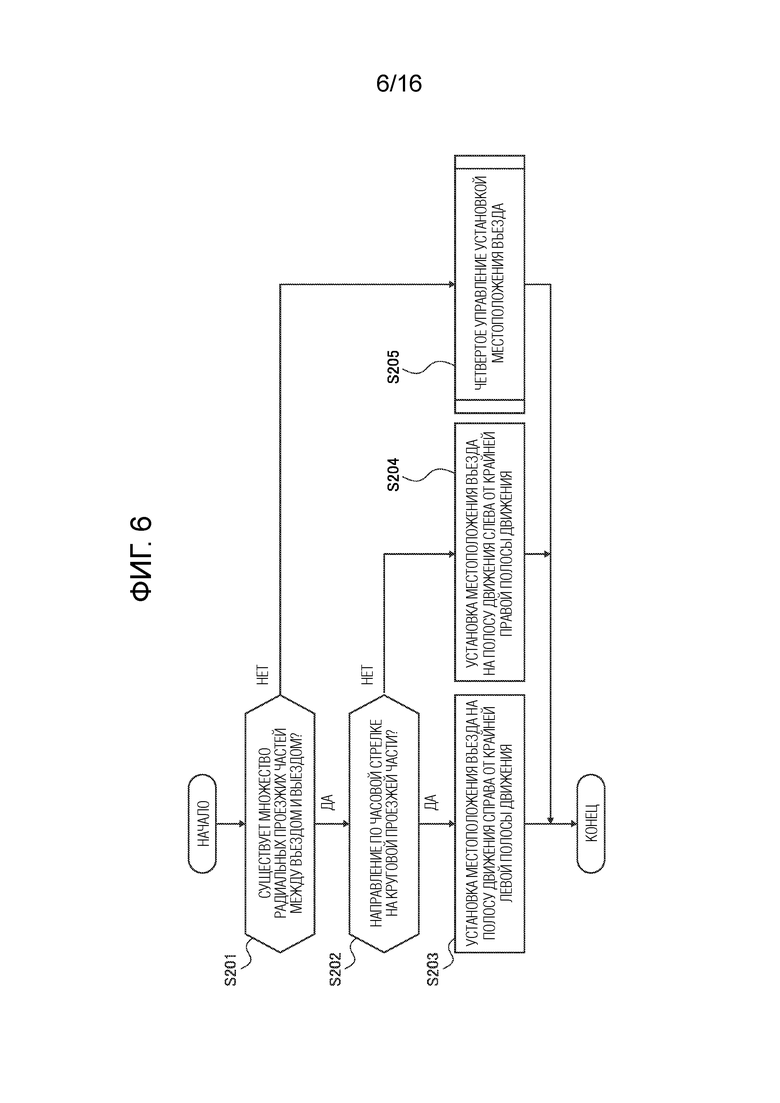
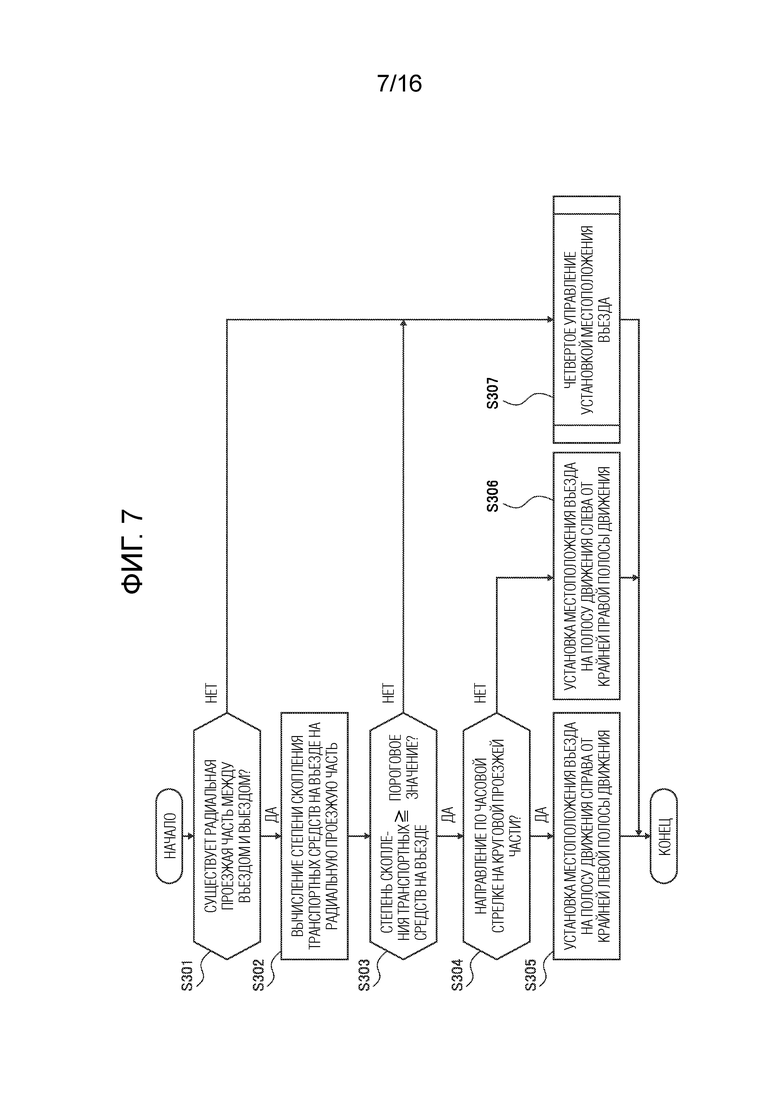

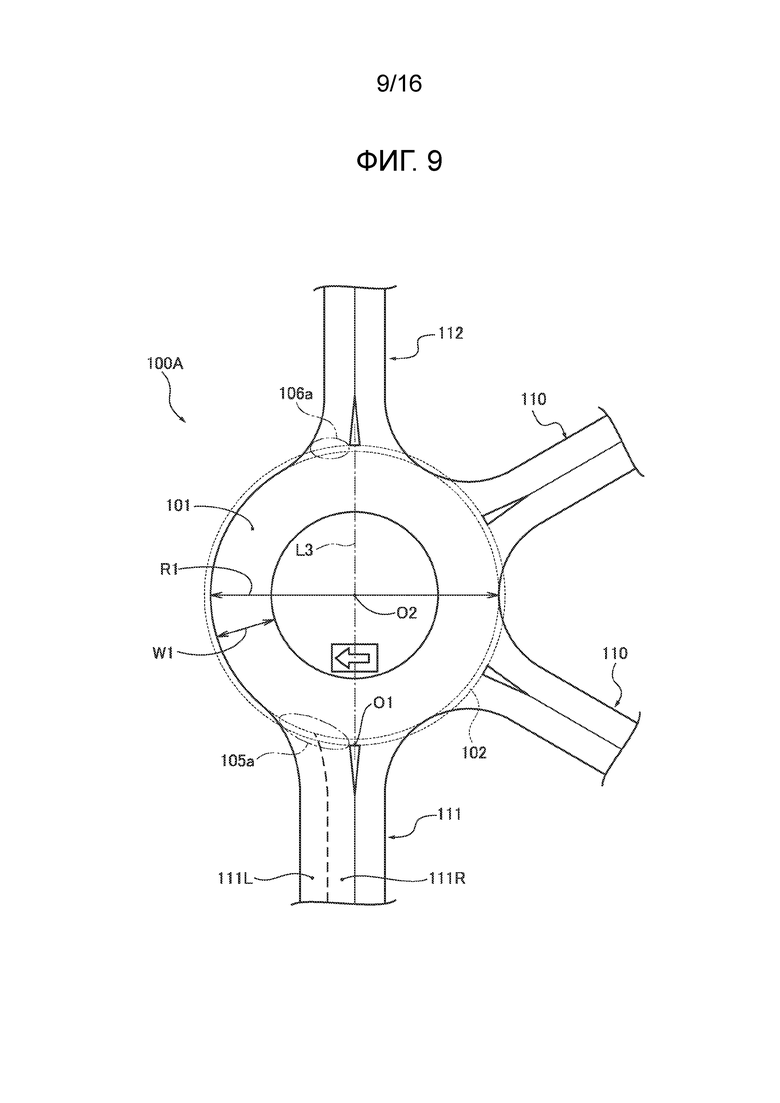

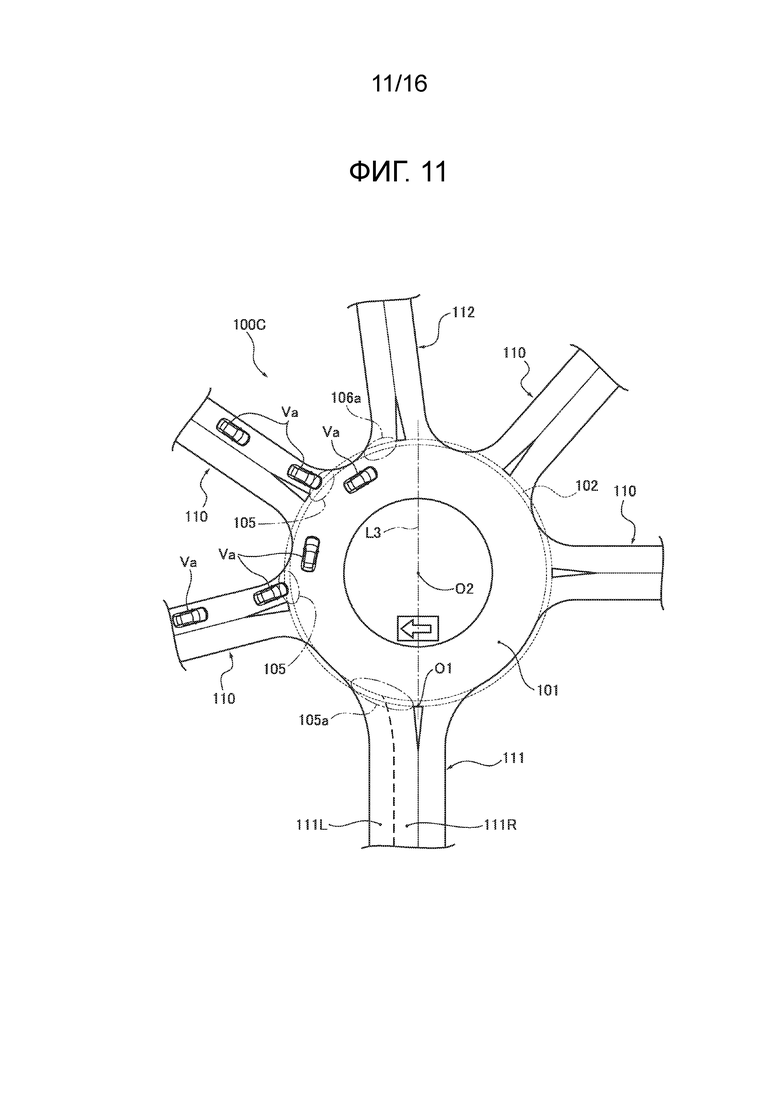
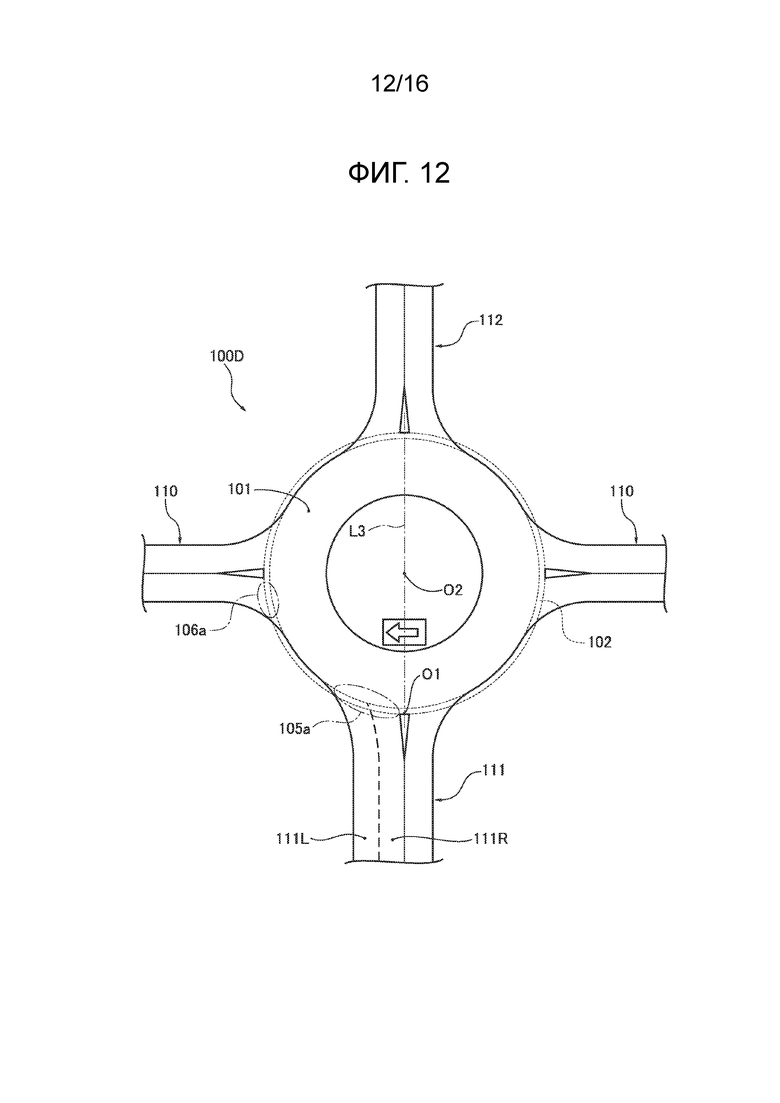




Изобретение относится к системам помощи при вождении. Технический результат заключается в автоматизации помощи при вождении по круговой проезжей части. Способ помощи при вождении, выполняемый с использованием контроллера, который вычисляет маршрут движения, по которому должно следовать рассматриваемое транспортное средство, и выполняет управление помощью при вождении на основе маршрута движения, при этом упомянутый способ включает этапы, на которых оценивают, прибыло ли рассматриваемое транспортное средство к перекрестку с круговым движением, определяют местоположение въезда, и устанавливают местоположение по ширине рассматриваемого транспортного средства в пределах полосы движения в качестве местоположения въезда на въезде на основе взаимного расположения между въездом и выездом, устанавливают целевое местоположение движения, ведущее к местоположению по ширине и выполняют управление помощью при вождении так, чтобы рассматриваемое транспортное средство двигалось вдоль целевого местоположения движения. 2 н.п. и 10 з.п. ф-лы, 16 ил.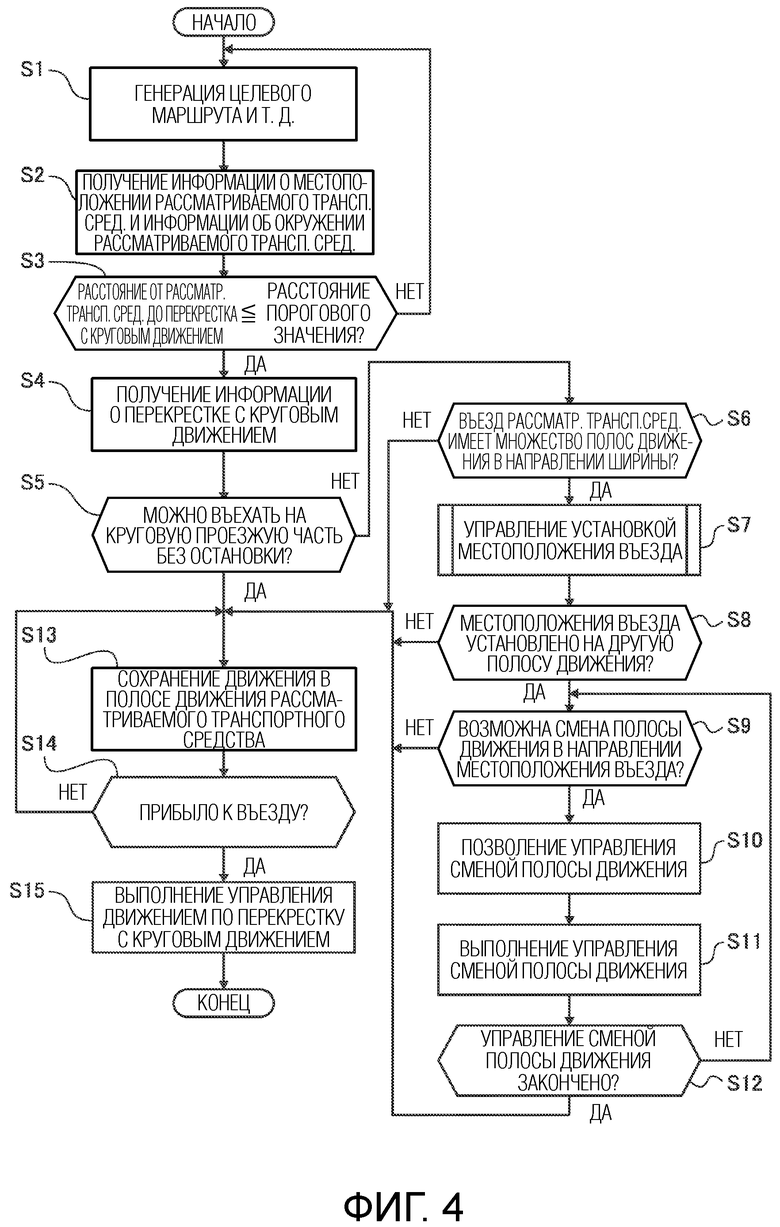
1. Способ помощи при вождении, выполняемый с использованием контроллера, который вычисляет маршрут движения, по которому должно следовать рассматриваемое транспортное средство, и выполняет управление помощью при вождении на основе маршрута движения, при этом упомянутый способ помощи при вождении содержит этапы, на которых:
оценивают, прибыло ли рассматриваемое транспортное средство к перекрестку с круговым движением, имеющему круговую проезжую часть, с которой соединены три или более радиальных проезжих частей;
определяют местоположение въезда, где рассматриваемое транспортное средство должно въехать на круговую проезжую часть, и определяют местоположение выезда, где рассматриваемое транспортное средство должно выехать с круговой проезжей части, когда выполнена оценка, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением; и
устанавливают местоположение по ширине рассматриваемого транспортного средства в пределах полосы движения в качестве местоположения въезда на въезде на основе взаимного расположения между въездом и выездом;
устанавливают целевое местоположение движения, ведущее к местоположению по ширине; и
выполняют управление помощью при вождении так, чтобы рассматриваемое транспортное средство двигалось вдоль целевого местоположения движения.
2. Способ помощи при вождении по п. 1, в котором:
установку местоположения въезда выполняют на основе относительного взаимного расположения между въездом и выездом;
когда выполнена оценка, что выезд присутствует в области слева от обращенного вперед направления въезда, местоположение въезда устанавливают слева от центрального по ширине местоположения въезда; и
когда выполнена оценка, что выезд присутствует в области справа от обращенного вперед направления въезда, местоположение въезда устанавливают справа от центрального по ширине местоположения въезда.
3. Способ помощи при вождении по п. 1 или 2, дополнительно содержащий этапы, на которых:
оценивают, имеет ли въезд две полосы движения, расположенные в направлении ширины;
когда выполнена оценка, что въезд имеет две полосы движения, расположенные в направлении ширины, установку местоположения въезда выполняют на основе относительного взаимного расположения между въездом и выездом;
когда выполнена оценка, что выезд присутствует в области слева от обращенного вперед направления въезда или в обращенном вперед направлении въезда, местоположение въезда устанавливают на левую полосу движения; и
когда выполнена оценка, что выезд присутствует в области справа от обращенного вперед направления въезда, местоположение въезда устанавливают на правую полосу движения.
4. Способ помощи при вождении по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
оценивают, имеет ли въезд три или более полосы движения, расположенные в направлении ширины;
когда выполнена оценка, что въезд имеет три или более полосы движения, расположенные в направлении ширины, установку местоположения въезда выполняют на основе относительного взаимного расположения между въездом и выездом;
когда выполнена оценка, что выезд присутствует в области слева от обращенного вперед направления въезда, местоположение въезда устанавливают на крайнюю левую полосу движения;
когда выполнена оценка, что выезд присутствует в области справа от обращенного вперед направления въезда, местоположение въезда устанавливают на крайнюю правую полосу движения; и
когда выполнена оценка, что выезд присутствует в обращенном вперед направлении въезда, местоположение въезда устанавливают на полосу движения между крайней левой полосой движения и крайней правой полосой движения.
5. Способ помощи при вождении по любому из пп. 1-4, дополнительно содержащий этапы, на которых:
оценивают, равен ли или больше размер внешнего диаметра круговой проезжей части, чем первое заданное значение, при котором может быть обеспечено расстояние, необходимое для смены полосы движения в пределах круговой проезжей части;
когда выполнена оценка, что размер внешнего диаметра равен ли или больше, чем первое заданное значение, установку местоположения въезда выполняют на основе относительного взаимного расположения между въездом и выездом; и
когда выполнена оценка, что выезд присутствует в обращенном вперед направлении въезда, местоположение въезда может быть установлено на любое местоположение.
6. Способ помощи при вождении по любому из пп. 1-5, дополнительно содержащий этапы, на которых:
оценивают, равен ли или больше размер по ширине круговой проезжей части, чем второе заданное значение, при котором обеспечена возможность смены полосы движения на круговой проезжей части;
когда выполнена оценка, что размер по ширине равен ли или больше, чем второе заданное значение, установку местоположения въезда выполняют на основе относительного взаимного расположения между въездом и выездом; и
когда выполнена оценка, что выезд присутствует в обращенном вперед направлении въезда, местоположение въезда может быть установлено на любое местоположение.
7. Способ помощи при вождении по любому из пп. 1-6, дополнительно содержащий этапы, на которых:
оценивают, обеспечен ли светофор, управляющий въездом на круговую проезжую часть;
когда выполнена оценка, что светофор обеспечен, установку местоположения въезда выполняют на основе относительного взаимного расположения между въездом и выездом; и
когда выполнена оценка, что выезд присутствует в обращенном вперед направлении въезда, местоположение въезда может быть установлено на любое местоположение.
8. Способ помощи при вождении по любому из пп. 5-7, в котором:
когда местоположение въезда может быть установлено в любое местоположение, местоположение въезда устанавливают на линии продолжения, продолжающейся вдоль проезжей части движения от текущего местоположения рассматриваемого транспортного средства.
9. Способ помощи при вождении по п. 1, в котором:
установку местоположения въезда выполняют на основе присутствия радиальных проезжих частей, полученного из взаимного расположения между въездом и выездом; и
когда выполнена оценка, что множество радиальных проезжих частей присутствует между въездом и выездом, местоположение въезда устанавливают справа от центрального по ширине местоположения въезда в случаях, в которых направление движения в пределах круговой проезжей части является направлением по часовой стрелке, и местоположение въезда устанавливают слева от центрального по ширине местоположения въезда в случаях, в которых направление движения в пределах круговой проезжей части является направлением против часовой стрелки.
10. Способ помощи при вождении по п. 1 или 9, в котором:
установку местоположения въезда выполняют на основе присутствия радиальных проезжих частей, полученного из взаимного расположения между въездом и выездом; и
когда выполнена оценка, что радиальные проезжие части присутствуют между въездом и выездом, и выполнена оценка, что существует высокая степень скопления транспортных средств, въезжающих на круговую проезжую часть с радиальных проезжих частей, местоположение въезда устанавливают справа от центрального по ширине местоположения въезда в случаях, в которых направление движения в пределах круговой проезжей части является направлением по часовой стрелке, и местоположение въезда устанавливают слева от центрального по ширине местоположения въезда в случаях, в которых направление движения в пределах круговой проезжей части является направлением против часовой стрелки.
11. Способ помощи при вождении по любому из пп. 1-10, дополнительно содержащий этапы, на которых:
оценивают, может ли смена полосы движения в направлении местоположения въезда быть выполнена плавно к тому времени, когда рассматриваемое транспортное средство прибывает к въезду, когда местоположение въезда установлено на местоположение, отклоненное от линии продолжения, продолжающейся вдоль проезжей части движения от текущего местоположения рассматриваемого транспортного средства; и
когда выполнена оценка, что смена полосы движения может быть выполнена плавно, позволяют выполнение смены полосы движения.
12. Устройство помощи при вождении, содержащее: контроллер, который вычисляет маршрут движения, по которому должно следовать рассматриваемое транспортное средство, и который выполняет управление помощью при вождении для помощи при движении рассматриваемого транспортного средства на основе маршрута движения, при этом упомянутое устройство помощи при вождении характеризуется тем, что
контроллер включает в себя:
блок оценки прибытия, который оценивает, прибыло ли рассматриваемое транспортное средство к перекрестку с круговым движением, имеющему круговую проезжую часть, с которой соединены три или более радиальных проезжих частей,
блок определения местоположения, который, когда выполнена оценка блоком оценки прибытия, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, определяет местоположение въезда, где рассматриваемое транспортное средство должно въехать на круговую проезжую часть, и местоположение выезда, где рассматриваемое транспортное средство должно выехать с круговой проезжей части, и
блок установки местоположения въезда, который устанавливает местоположение по ширине рассматриваемого транспортного средства в пределах полосы движения в качестве местоположения въезда на основе взаимного расположения между въездом и выездом, определенными блоком определения местоположения,
при этом контроллер устанавливает целевое местоположение движения, ведущее к местоположению по ширине, и выполняет управление помощью при вождении так, чтобы рассматриваемое транспортное средство двигалось вдоль целевого местоположения движения.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2011 |
|
RU2564268C1 |

